Изобретение относится к средствам дезинфекции и может быть использовано для автоматической дезинфекции поручней, дверных ручек и других протяженных цилиндрических объектов, расположенных в общественных местах, общественном транспорте и т.д.
Известны устройства для автоматической стерилизации поручней эскалаторов с помощью ультрафиолетового излучения. Например, известно устройство для стерилизации поручней эскалаторов, в корпусе которого расположен источник УФ излучения, отражатель, экраны, датчик движения, выключатель (US 2013/0240756 A1, 19.09.2013). Устройство установлено таким образом, что поручень эскалатора проходит через корпус устройства вдоль источника УФ излучения, и при перемещении поручня происходит УФ стерилизация его поверхности.
Такое устройство неприменимо для неподвижных поручней, дверных ручек и других цилиндрических объектов, расположенных в общественных местах и общественном транспорте, поскольку оно является стационарным, и воздействие УФ излучения происходит только с одной стороны поручня.
Наиболее близким в предложенному является устройство для автоматической очистки и дезинфекции поручней в автобусе, содержащее расположенные внутри поручня провода, расположенные в цилиндрическом корпусе электродвигатель, соединенный с проводами, щетки и очищающие губки, большая часть середины которых является дезинфицирующей губкой, причем устройство снабжено направляющей планкой, а электродвигатель выполнен с возможностью перемещения по направляющей планке (CN204196750 U, 11.03.2015). При использовании устройство запускается водителем через пульт управления и может автоматически чистить поручни.
Недостатком известного устройства является износ поверхности вследствие очистки их щетками, а также износ самих щеток с необходимостью их периодической замены и необходимость периодического пропитывания средней части губок дезинфицирующим веществом. Провода, соединяющие устройство с источником электрической энергии, подвержены износу и обрыву, существует проблема обеспечения их перемещения внутри поручня.
Техническая проблема, решаемая изобретением, заключается в создании дезинфицирующего устройства, не зависящего от необходимости пополнения запаса дезинфицирующей жидкости и не содержащего провода, перемещающиеся вместе с подвижным узлом устройства.
Техническая проблема решается устройством для дезинфекции поверхности протяженного объекта, содержащим полый корпус, установленные в нем средство дезинфекции и средство перемещения по поверхности объекта, которое отличается тем, что полый корпус выполнен в виде кольца, средство дезинфекции включает расположенный с внутренней стороны кольца по меньшей мере один источник ультрафиолетового (УФ) излучения и соединенный с ним перезаряжаемый источник электрической энергии, который соединен через преобразователь напряжения по меньшей мере с одной принимающей катушкой индуктивности, установленной на торце кольца, при этом устройство снабжено блоком управления и беспроводным зарядным устройством, образованным по меньшей мере одной передающей катушкой индуктивности, установленной на торце объекта с возможностью взаимодействия с по меньшей мере одной принимающей катушкой индуктивности, причем блок управления электрически соединен с по меньшей мере одной передающей катушкой индуктивности.
При этом преобразователь напряжения предпочтительно расположен на печатной плате, закрепленной на кольце.
В первом варианте исполнения устройства при выполнении протяженного цилиндрического объекта полым средство перемещения выполнено в виде поршня, расположенного внутри полого объекта, первых постоянных магнитов, расположенных на кольце, и вторых постоянных магнитов, расположенных на поршне с возможностью взаимодействия с постоянными магнитами кольца, при этом блок управления связан с пневмораспределителем, выполненным с возможностью соединения с полостями объекта по обе стороны от поршня и с возможностью переключения пневмораспределителя на поочередную подачу сжатого воздуха в полости объекта.
Для обеспечения возможности определения достижения конца протяженного объекта блок управления может быть соединен с датчиками Холла, выполненными с возможностью установки на каждом конце объекта, при этом на кольце с каждой боковой сторонырасположен третий постоянный магнит с возможностью взаимодействия с соответствующим датчиком Холла.
Устройство по первому варианту может также быть дополнительно снабжено датчиком обнаружения препятствий на поверхности объекта, установленным на кольце, при этом устройство снабжено установленным на кольце микроконтроллером, электрически соединенным с датчиком обнаружения препятствий, а также модулями беспроводной связи, один из которых соединен с блоком управления, а другой – микроконтроллеромс возможностью передачи сигнала с микроконтроллера на блок управления.
Предпочтительно микроконтроллер располагать на печатной плате, закрепленной на кольце.
В более простом выполнении устройства по первому варианту поршень имеет форму, повторяющую форму внутренней поверхности кольца.
В другом варианте поршень может иметь форму двух соединенных друг с другом сегментов средней части сферы с образованием двух кольцевых выпуклых участков поверхности, а кольцо имеет выпуклую внутреннюю поверхность в форме сегмента тора.
Во втором варианте исполнения устройства средство перемещения выполнено в виде установленного на кольце по меньшей мере одного колёсного движителя с электромотором, связанным с перезаряжаемым источником электрической энергии, а устройство снабжено установленным на кольце микроконтроллером, электрически соединенным с электромотором по меньшей мере одного колёсного движителя, при этом устройство снабжено модулями беспроводной связи, один из которых соединен с блоком управления, а другой – с микроконтроллером.
При этом микроконтроллер целесообразно располагать на печатной плате, закрепленной на кольце.
Для обеспечения возможности определения достижения конца протяженного объекта во втором варианте выполнения устройства оно может быть снабжено постоянными магнитами, выполненными с возможностью установки на каждом конце объекта, при этом на кольце с каждой боковой стороны расположен датчик Холла с возможностью взаимодействия каждого указанного постоянного магнита с соответствующим датчиком Холла, при этом датчики Холла соединены с микроконтроллером.
Устройство по второму варианту также может быть дополнительно снабжено датчиком обнаружения препятствий на поверхности объекта, установленным на кольце и соединенным с микроконтроллером.
В обоих вариантах устройства возможно выполнение кольца замкнутым, при этом устройство содержит одну пару передающей и принимающей катушек индуктивности.
Также возможно выполнение кольца разомкнутым с расстоянием между краями кольца, достаточным для прохождения соединенных с объектом других объектов, а устройство содержит несколько пар передающей и принимающей катушек индуктивности.
Кроме того, указанные края разомкнутого кольца могут лежать в плоскостях, проходящих через его ось или параллельных его оси, с образованием прямолинейного прохода между указанными краями.
Также каждый из указанных краев разомкнутого кольца может иметь форму участка спирали с образованием спирального прохода между указанными краями.
Кроме того, устройство может быть дополнительно снабжено средством обнаружения препятствий на поверхности объекта, выполненным с возможностью передачи сигнала на блок управления.
Изобретение поясняется чертежами.
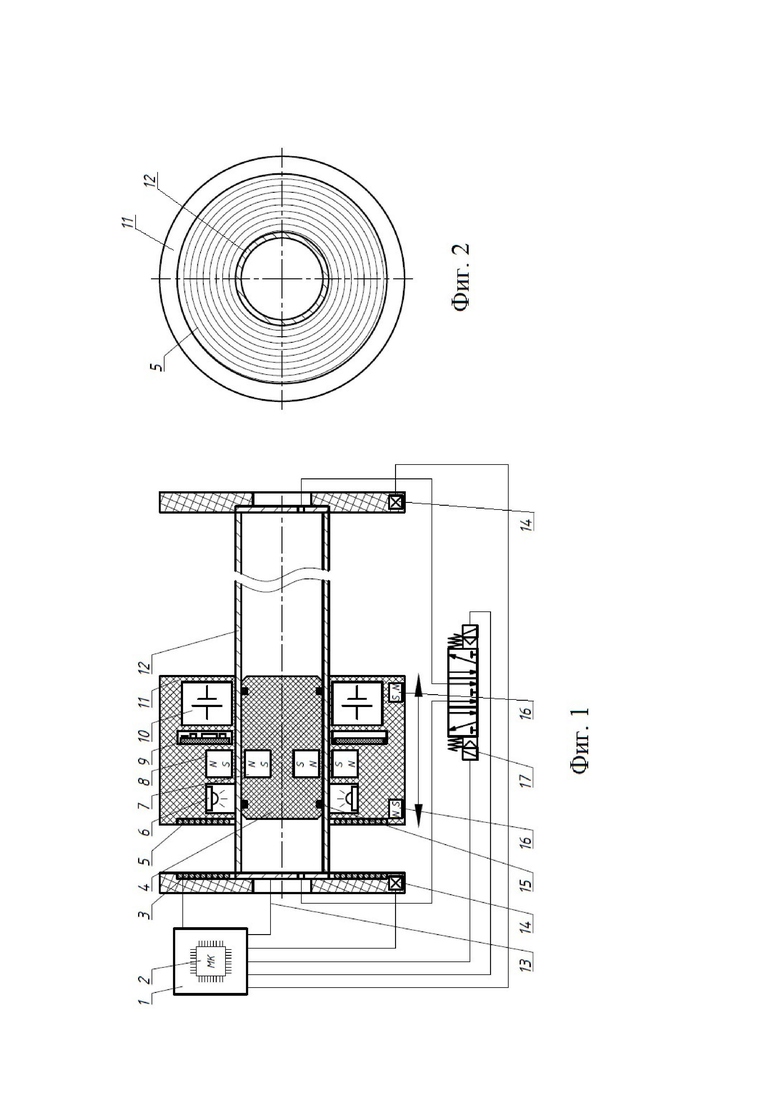
На фиг. 1 показано предложенное устройство, вариант выполнения со средством перемещения с помощью магнитного поля и с замкнутым кольцом, осевой разрез.
На фиг. 2 – вид на замкнутое кольцо на фиг. 1 со стороны приемной катушки индуктивности.
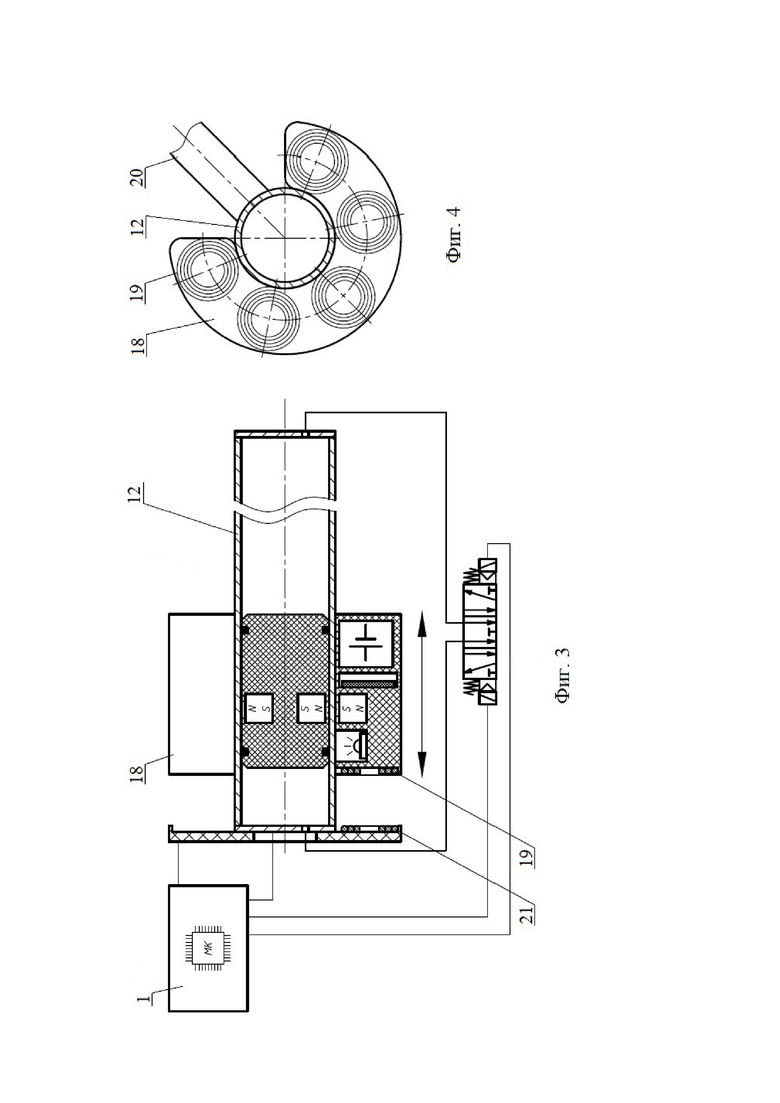
На фиг. 3 – предложенное устройство, вариант выполнения со средством перемещения с помощью магнитного поля и с разомкнутым кольцом, осевой разрез.
На фиг. 4 – вид на разомкнутое кольцо на фиг. 3 со стороны приемных катушек индуктивности.
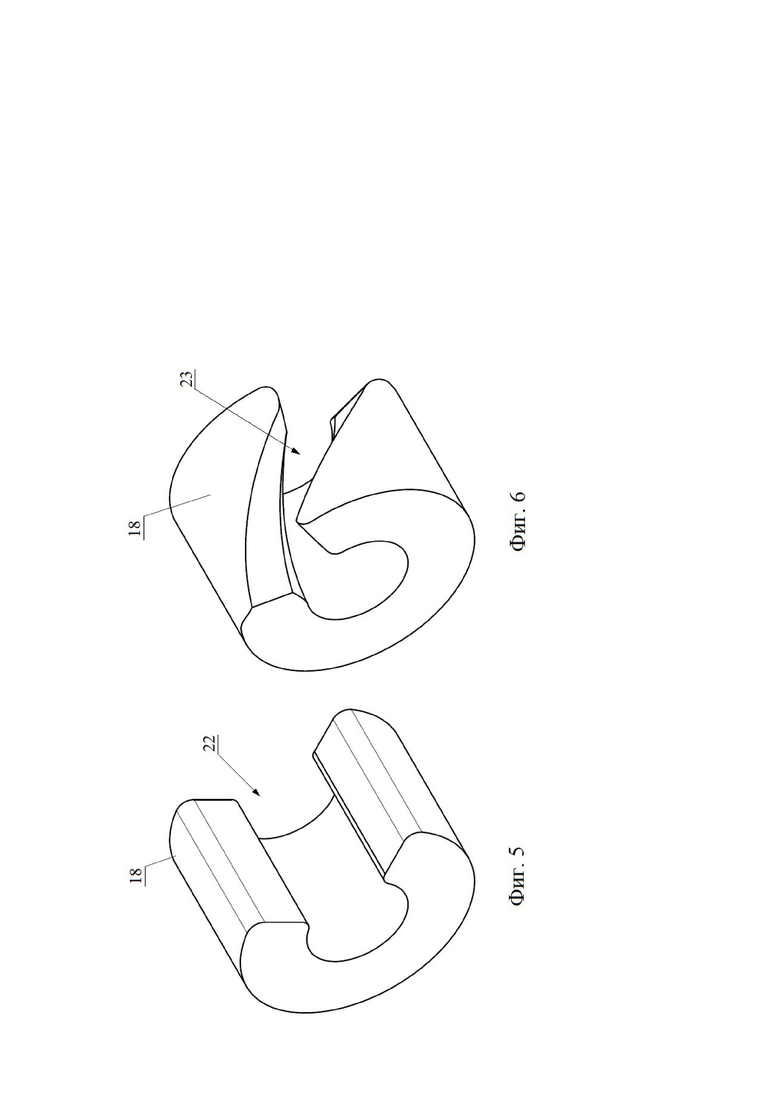
На фиг. 5 – разомкнутое кольцо с продольным вырезом, общий вид.
На фиг. 6 – разомкнутое кольцо со спиральным вырезом, общий вид.
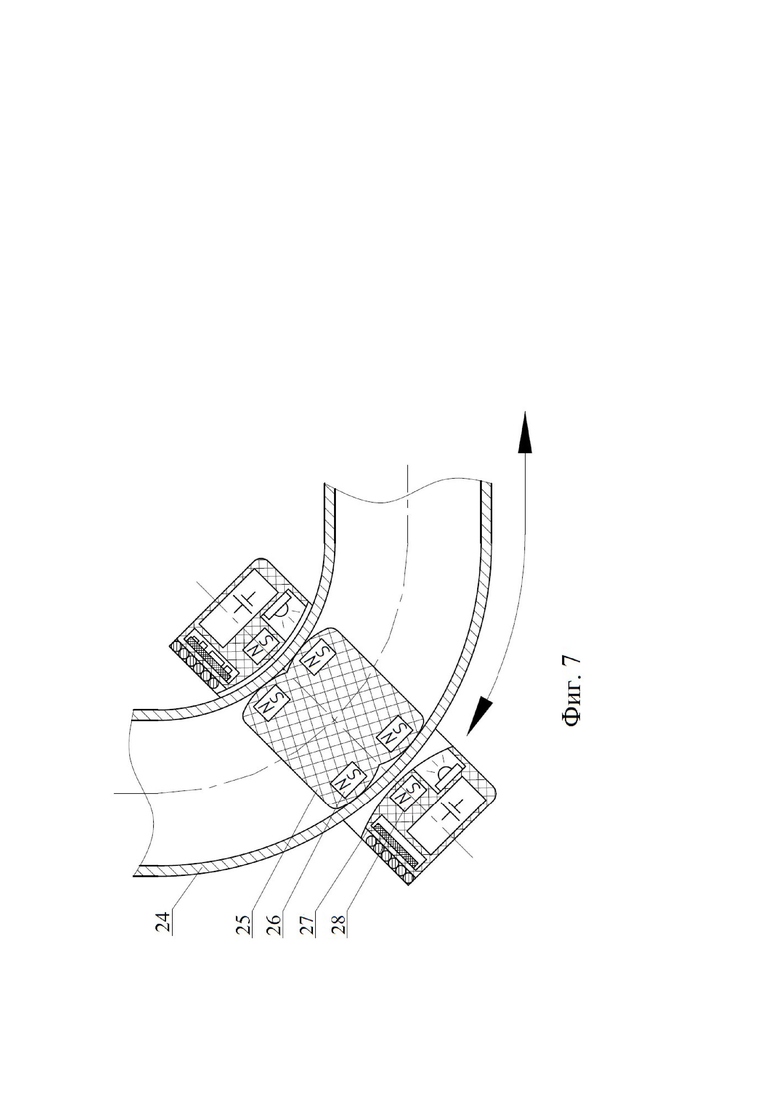
На фиг. 7 – фрагмент осевого разреза предложенного устройства, вариант выполнения с кольцом и поршнем, имеющими выпуклые поверхности.
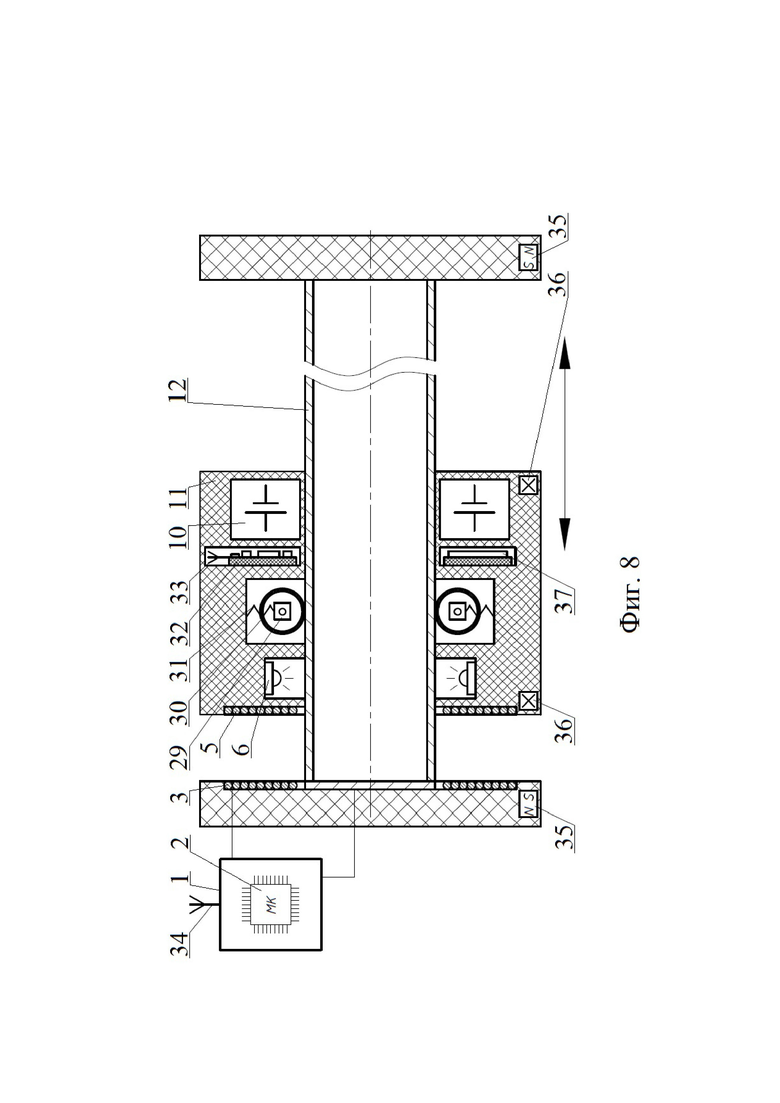
На фиг. 8 – предложенное устройство, вариант выполнения со средством перемещения в виде колёсных движителей.
Устройство для автоматической дезинфекции поручней, дверных ручек и других протяженных объектов постоянного поперечного сечения при помощи ультрафиолетового излучения (фиг. 1) содержит устанавливаемый, например, на поручне 12 корпус в виде кольца 11 с установленными с его внутренней стороны источниками 6 УФ излучения, например, УФ светодиодами или лампами. В случае цилиндрической формы протяженного объекта кольцо 11 имеет цилиндрическую форму. В кольце 11 выполнена полость, в которой размещен перезаряжаемый источник 10 электрической энергии (например, аккумулятор или ионистор), к которому подключены источники 6 УФ излучения. Источник 10 электрической энергии заряжается при помощи беспроводного (индукционного) зарядного устройства, плоская передающая катушка 3 индуктивности которого расположена в торце поручня 12, а плоская принимающая катушка 5 индуктивности (фиг. 2) расположена на торце кольца 11. В другой полости кольца 11 расположена печатная плата 9, которая содержит преобразователь напряжения из переменного в принимающей катушке 5 в постоянное в источнике 10 электрической энергии, а также другой преобразователь напряжения на источнике 10 электрической энергии в напряжение (ток) на источнике УФ излучения – УФ светодиоде 6 (светодиодах) или лампе. Принимающая катушка 5 электрически связана с печатной платой 9, которая электрически связана с источником 10 электрической энергии.
Для предотвращения столкновения движущегося кольца 11 с рукой человека, держащегося за поручень 12, в устройстве может быть предусмотрен датчик обнаружения препятствия. Например, на кольце 11 может быть установлен датчик препятствий, например, инфракрасный, или датчик приближения, например, оптический (на чертежах не показан). В этом случае на кольце 11 на печатной плате 9 располагается микроконтроллер (на фиг. 1 не показан), соединенный с датчиком обнаружения препятствий и снабженный модулем беспроводной связи для передачи сигнала на блок 1 управления, который также в этом случае снабжен модулем беспроводной связи. Возможен также вариант выполнения, когда электронный блок 1 управления соединён с поручнем 12 проводником 13 (фиг. 1), при помощи которого измеряется ёмкость поручня 12.
В случае использования магнитного поля для перемещения кольца 11 внутри поручня 12, представляющего из себя тонкостенную немагнитную металлическую трубу, средство перемещения выполнено в виде расположенного внутри поручня 12 поршня 4 с кольцевыми уплотнениями 15 и постоянными магнитами 7. Также постоянные магниты 8 расположены на подвижном кольце 11. Взаимодействие магнитных полей постоянных магнитов 7 поршня 4 и постоянных магнитов 8 кольца 11 с источниками 6 УФ излучения используется для их совместного перемещения.
Поршень 4 перемещается внутри поручня 12 за счёт давления воздуха, подаваемого в поручень 12 с торцов, а подвижное кольцо 11 перемещается снаружи вдоль поручня 11 под действием магнитного поля. Поручень 12 выполняет функцию пневмоцилиндра. При этом сжатый воздух может поступать из внешней пневматической системы (например, пневматической системы закрывания дверей или пневмоподвески).
Электронный блок 1 управления, основанный на микроконтроллере 2, управляет пневмораспределителем 17, подающим сжатый воздух внутрь поручня 12 в полости по обеим сторонам поршня 4. Электронный блок 1 управляет также работой передающей катушки 3 индуктивности беспроводного зарядного устройства. Электронный блок 1 управления подключен к внешнему источнику питания или к бортовой сети транспортного средства и может быть установлен в салоне транспортного средства или в кабине водителя.
Для определения достижения конца поручня 12 могут использоваться датчики 14 Холла (фиг. 1), установленные на концах поручня 12, которые могут реагировать на магниты 7, 8. Кроме этого на кольце 11 с его боковых сторон могут быть расположены постоянные магниты 16, которые при приближении кольца 11 к концам поручня 12 будут находиться в непосредственной близости от датчиков 14 Холла. Датчики 14 Холла соединены с блоком 1 управления.
Достижение конца поручня 12 может также определяться при помощи концевых выключателей (на фиг. 1 не показаны), установленных на торцевой детали поручня 12 и соединенных с блоком 1 управления, за счёт механического контакта концевого выключателя с подвижным кольцом 11
При наличии на поручне 12 промежуточных опор (консолей, кронштейнов) 20 кольцо 18 может быть разомкнутым (фиг. 3, 4) с расстоянием между краями кольца 18, достаточным для прохождения соединенных с поручнем 12 промежуточных опор 20. При этом вместо одной пары катушек индуктивности (принимающей и передающей) используется несколько пар катушек 19 и 21 индуктивности меньшего диаметра.
Разомкнутое кольцо 18 может иметь простой продольный вырез 22 сектором (фиг. 5), при этом края кольца 18 лежат в плоскостях, проходящих через его ось или параллельных его оси, с образованием прямолинейного прохода между краями. Однако в таком случае часть поверхности остаётся необработанной.
Для преодоления этого недостатка разомкнутое кольцо 18 может иметь спиральный вырез 23 (фиг. 6), при этом каждый из указанных краев кольца 18 имеет форму участка спирали с образованием спирального прохода между краями.
При необходимости обработки изогнутых поручней 24 (фиг. 7) поршень 25 может быть выполнен в виде двух соединенных друг с другом сегментов средней части сферы с образованием двух кольцевых выпуклых участков поверхности, за счёт чего обеспечивается постоянный контакт поршня 25 с магнитами 26 с внутренней поверхностью поручня 24 по двум кольцевым линиям. Внутренняя поверхность кольца 27 с магнитами 28, обращённая к поручню 24, может быть выпуклой в форме сегмента тора для исключения засекания.
Кроме того, возможно выполнение поршня и кольца, которое позволяет с помощью магнитов поршня и магнитов кольца реализовать магнитный подшипник, при этом кольцо перемещается практически без трения о поверхность поручня.
Устройство для автоматической дезинфекции может применяться для обработки поручней, ручек дверей и других протяженных объектов в виде трубы с различным профилем, при этом сечение трубы с обрабатываемой поверхностью должно соответствовать сечению поршня 4 и сечению подвижного кольца 11.
При невозможности использования сжатого воздуха средство перемещения подвижного кольца 11 может быть выполнено с использованием одного или нескольких встроенных колёсных движителей 30 (фиг. 8). Колёса приводятся во вращение электромоторами 29 и получают энергию от встроенных источников 10 электрической энергии так же, как и источники УФ излучения. Для обеспечения надёжного контакта колес с поверхностью поручня 12 используются прижимные пружины 31. На кольце 11 на печатной плате 32 расположен другой микроконтроллер 37, соединенный с модулем 33 беспроводной связи. При этом блок управления также снабжен модулем 34 беспроводной связи.
Для определения достижения конца поручня 12 могут использоваться датчики 36 Холла (фиг. 1), установленные на кольце 11, которые могут реагировать на магниты 35, расположенные на торцах поручня 12 и которые при приближении кольца 11 к концам поручня 12 будут находиться в непосредственной близости от датчиков 36 Холла. Датчики 36 Холла соединены с микроконтроллером 37.
Достижение конца поручня 12 может также определяться при помощи концевых выключателей, установленных на торце подвижного кольца 11 и соединенных с микроконтроллером 37, за счёт механического контакта концевого выключателя с торцевым элементом поручня 12.
Предложенное устройство работает следующим образом.
Кольцо 11 с магнитами (фиг. 1) приводится в движение путем подачи сжатого воздуха через пневмораспределитель 17, управляемый блоком 1 управления, сначала в одну полость поручня 12. Достижение кольцом 11 конца поручня 12 может определяться при помощи датчиков 14 Холла или при помощи концевых выключателей. Сигнал от датчика 14 Холла передается на блок 1 управления, который переключает пневмораспределитель 17, сжатый воздух подается в другую полость поручня 12, и поршень 4 вместе с кольцом 11 начинает движение в обратную сторону. При появлении препятствия на пути устройства срабатывает датчик обнаружения препятствия, сигнал передается микроконтроллером посредством модулей беспроводной связи (на фиг. 1 не показаны) на блок 1 управления, который подает сигнал на пневмораспределитель 17, подача сжатого воздуха прекращается и устройство останавливается. При удалении препятствия работа устройства возобновляется.
Поверхность поручня 12 дезинфицируется путем облучения ее УФ излучением от источника 6 (источников). Когда источник 10 электрической энергии разряжается, при нахождении кольца 11 вблизи торца поручня 12 блок 1 управления подает ток в подающую катушку 3 индуктивности, и источник 10 электрической энергии заряжается от принимающей катушки 5 индуктивности.
Кольцо 11 с колесными движителями (фиг. 8) приводится в движение путем включения электромоторов 29 колёсных движителей 30. Микроконтроллер 37, расположенный на печатной плате 32, получает команду о начале движения по радиоканалу посредством модулей 34, 33 беспроводной связи от неподвижного микроконтроллера 2 блока 1 управления. Поверхность поручня 12 дезинфицируется путем облучения ее УФ излучением от источника 6 (источников). Достижение конца поручня 12 может определяться при помощи датчиков 36 Холла или концевых выключателей. При достижении конца поручня 12 микроконтроллер 37 кольца 11 включает обратное направление вращения колёс. При появлении препятствия на пути устройства срабатывает датчик обнаружения препятствия (на чертежах не показан), сигнал поступает на микроконтроллер 37, который останавливает работу колесного движителя 30 и движение кольца 11 до устранения препятствия. При разрядке источника 10 электрической энергии, микроконтроллер 37 подвижного кольца 11 перемещает его к передающей катушке 3 индуктивности зарядного устройства и передаёт на микроконтроллер 2 по радиоканалу сигнал о начале зарядной сессии. После завершения зарядки микроконтроллер 37 подвижного кольца 11 передаёт команду о прекращении зарядки и продолжает обработку в выбранном режиме.
При перемещении кольца 11 по поручню или другому протяженному объекту происходит обработка его поверхности УФ излучением. Устройство может проводить обработку непрерывно, периодически, или по команде, поступающей из внешней информационной системы (например, системы управления транспортным средством).
Устройство для автоматической дезинфекции может применяться для обработки поручней, ручек дверей и других протяженных объектов с различным профилем, при этом сечение трубы с обрабатываемой поверхностью должно соответствовать сечению поршня и сечению подвижного кольца.
Изобретение относится к средствам дезинфекции и может быть использовано для автоматической дезинфекции протяженных объектов. Устройство для дезинфекции поверхности протяженного цилиндрического объекта содержит полый корпус, установленные в нем средство дезинфекции и средство перемещения по поверхности объекта. При этом полый корпус выполнен в виде кольца, средство дезинфекции включает расположенный с внутренней стороны кольца по меньшей мере один источник ультрафиолетового излучения и соединенный с ним перезаряжаемый источник электрической энергии, который соединен через преобразователь напряжения по меньшей мере с одной принимающей катушкой индуктивности, установленной на торце кольца. Устройство снабжено блоком управления и беспроводным зарядным устройством, образованным по меньшей мере одной передающей катушкой индуктивности, установленной на торце объекта с возможностью взаимодействия с по меньшей мере одной принимающей катушкой индуктивности, причем блок управления электрически соединен с по меньшей мере одной передающей катушкой индуктивности. Изобретение обеспечивает создание дезинфицирующего устройства, не зависящего от необходимости пополнения запаса дезинфицирующей жидкости и не содержащего провода, перемещающиеся вместе с подвижным узлом устройства. 16 з.п. ф-лы, 8 ил.
1. Устройство для дезинфекции поверхности протяженного цилиндрического объекта, содержащее полый корпус, установленные в нем средство дезинфекции и средство перемещения по поверхности объекта, отличающееся тем, что полый корпус выполнен в виде кольца, средство дезинфекции включает расположенный с внутренней стороны кольца по меньшей мере один источник ультрафиолетового излучения и соединенный с ним перезаряжаемый источник электрической энергии, который соединен через преобразователь напряжения по меньшей мере с одной принимающей катушкой индуктивности, установленной на торце кольца, при этом устройство снабжено блоком управления и беспроводным зарядным устройством, образованным по меньшей мере одной передающей катушкой индуктивности, установленной на торце объекта с возможностью взаимодействия с по меньшей мере одной принимающей катушкой индуктивности, причем блок управления электрически соединен с по меньшей мере одной передающей катушкой индуктивности.
2. Устройство по п. 1, отличающееся тем, что преобразователь напряжения расположен на печатной плате, закрепленной на кольце.
3. Устройство по п. 1, отличающееся тем, что при выполнении протяженного цилиндрического объекта полым средство перемещения выполнено в виде поршня, расположенного внутри полого объекта, первых постоянных магнитов, расположенных на кольце, и вторых постоянных магнитов, расположенных на поршне с возможностью взаимодействия с постоянными магнитами кольца, при этом блок управления связан с пневмораспределителем, выполненным с возможностью соединения с полостями объекта по обе стороны от поршня и с возможностью переключения пневмораспределителя на поочередную подачу сжатого воздуха в полости объекта.
4. Устройство по п. 3, отличающееся тем, что блок управления соединен с датчиками Холла, выполненными с возможностью установки на каждом конце объекта, а на кольце с каждой боковой стороны расположен третий постоянный магнит с возможностью взаимодействия с соответствующим датчиком Холла.
5. Устройство по п. 3, отличающееся тем, что дополнительно снабжено датчиком обнаружения препятствий на поверхности объекта, установленным на кольце, при этом устройство снабжено установленным на кольце микроконтроллером, электрически соединенным с датчиком обнаружения препятствий, а также модулями беспроводной связи, один из которых соединен с блоком управления, а другой – с микроконтроллером с возможностью передачи сигнала с микроконтроллера на блок управления.
6. Устройство по п. 5, отличающееся тем, что микроконтроллер расположен на печатной плате, закрепленной на кольце.
7. Устройство по п. 3, отличающееся тем, что поршень имеет форму, повторяющую форму внутренней поверхности кольца.
8. Устройство по п. 3, отличающееся тем, что поршень имеет форму двух соединенных друг с другом сегментов средней части сферы с образованием двух кольцевых выпуклых участков поверхности, а кольцо имеет выпуклую внутреннюю поверхность в форме сегмента тора.
9. Устройство по п. 1, отличающееся тем, что средство перемещения выполнено в виде установленного на кольце по меньшей мере одного колёсного движителя с электромотором, связанным с перезаряжаемым источником электрической энергии, а устройство снабжено установленным на кольце микроконтроллером, электрически соединенным с электромотором по меньшей мере одного колёсного движителя, при этом устройство снабжено модулями беспроводной связи, один из которых соединен с блоком управления, а другой – с микроконтроллером.
10. Устройство по п. 9, отличающееся тем, что микроконтроллер расположен на печатной плате, закрепленной на кольце.
11. Устройство по п. 9, отличающееся тем, что снабжено постоянными магнитами, выполненными с возможностью установки на каждом конце объекта, а на кольце с каждой боковой стороны расположен датчик Холла с возможностью взаимодействия каждого указанного постоянного магнита с соответствующим датчиком Холла, при этом датчики Холла соединены с микроконтроллером.
12. Устройство по п. 9, отличающееся тем, что дополнительно снабжено датчиком обнаружения препятствий на поверхности объекта, установленным на кольце и соединенным с микроконтроллером.
13. Устройство по п. 1, отличающееся тем, что кольцо выполнено замкнутым, а устройство содержит одну пару передающей и принимающей катушек индуктивности.
14. Устройство по п. 1, отличающееся тем, что кольцо выполнено разомкнутым с расстоянием между краями кольца, достаточным для прохождения соединенных с объектом других объектов, а устройство содержит несколько пар передающей и принимающей катушек индуктивности.
15. Устройство по п. 14, отличающееся тем, что указанные края кольца лежат в плоскостях, проходящих через его ось или параллельных его оси, с образованием прямолинейного прохода между указанными краями.
16. Устройство по п. 14, отличающееся тем, что каждый из указанных краев кольца имеет форму участка спирали с образованием спирального прохода между указанными краями.
17. Устройство по п. 1, отличающееся тем, что дополнительно снабжено средством обнаружения препятствий на поверхности объекта, выполненным с возможностью передачи сигнала на блок управления.
| ДЕЗИНФЕКЦИОННОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 1994 |
|
RU2083226C1 |
| US 2013240756 A1, 19.09.2013 | |||
| US 2006175177 A1, 10.08.2006 | |||
| CN 204196750 U, 11.03.2015. | |||

