Область техники
Изобретение относится к области транспорта, а именно к транспортным средствам с одним колесом, которыми водитель управляет стоя.
Уровень техники
Из уровня техники известно моноколесо (патент US8807250, дата публикации 19.08.2014), состоящее из колёсной части, подножек, гироскопического датчика, аккумулятора, двигателя и корпуса. Колёсная часть содержит раму, две подножки, гироскопический датчик, аккумулятор, двигатель, два направляющих колеса и одно ведущее колесо, обод и шину. Рама выполнена в виде трёхлучевой звезды, на концах двух лучей рамы закреплены по одному направляющему колесу, а на конце третьего луча – ведущее колесо, соединённое с двигателем. При этом один луч (вертикальный) рамы выполнен как направляющая, вдоль которой перемещается отрезок трубы прямоугольного профиля, который соединён с направляющей при помощи пружины и на котором закреплены подножки. Направляющая, отрезок трубы прямоугольного профиля и пружина вместе выполняют роль амортизатора для подножек. На раме также закреплены гироскопический датчик, аккумулятор, двигатель. Рама и закреплённые на ней элементы не вращаются относительно оси моноколеса. Вращение на обод с шиной передаётся от двигателя через ведущее колесо за счёт трения, направляющие колёса обеспечивают определённое положение (вдоль оси моноколеса) обода с шиной относительно рамы.
Недостатком указанного технического решения является невысокая надёжность конструкции. Вызвано это тем, что при попадании инородных микрочастиц (например, пыли) в зоны контакта элементов (между ведущим и направляющими колёсами и ободом и между отрезком трубы прямоугольного профиля и направляющей) увеличивается вероятность отказа вследствие износа контактирующих элементов или их заклинивания.
Наиболее распространены моноколёса, в которых вращение на обод с шиной передаётся за счёт взаимодействия постоянных магнитов на ободе и электромагнитов на неподвижной (относительно оси) части моноколеса. Принципиальное устройство таких моноколёс известно из уровня техники (например, https://sunwheel.ru/info/info1.html, дата обращения 21.11.2017). Например, известно моноколесо (https://www.popmech.ru/gadgets/257992-razbiraem-monokoleso-airwheel-kak-eto-rabotaet/, дата обращения 21.11.2017), основными элементами которой являются колёсная часть, подножки, корпус, аккумулятор, гироскопический датчик. Колёсная часть состоит из неподвижной оси, на которой закреплён статор с электромагнитами, который размещён внутри обода с постоянными магнитами и шиной, на оси также при помощи подшипников размещены крышки и при помощи кронштейнов подножки. Корпус также закреплён на оси.
Недостатком этого технического решения является недостаточная безопасность использования моноколеса, вызванная жёстким соединением подножек с осью. При перемещении пользователя на моноколесе по неровной поверхности, за счёт жёсткого соединения подножек с осью колебания почти полностью передаются на подножки, на которых стоит пользователь. В результате увеличивается вероятность падения пользователя с моноколеса.
Наиболее близким техническим решением (прототип) является моноколесо (https://ecodrift.ru/wiki-article/obzor-monokolesa-gotway-mcm3-s-amortizatorami-krovat-na-pruzhinah/, дата обращения 21.11.2017), в котором подножки подвижно соединены с неподвижными (относительно оси) частями моноколеса. Каждая из подножек присоединена к корпусу при помощи шарнирного четырёхзвенника и двух пружин.
Недостатком известного технического решения является недостаточная безопасность использования моноколеса, вызванная отсутствием жёсткой связи подножек между собой. При движении пользователя на моноколесе по неровной поверхности пружины каждой из подножек действуют отдельно друг от друга. Вследствие этого, подножки, на которых стоит пользователь, при наклоне моноколеса в боковую сторону (при повороте) перемещаются относительно корпуса по-разному, и, следовательно, вероятность падения пользователя с моноколеса увеличивается.
Техническим результатом предлагаемого изобретения является повышение безопасности использования моноколеса.
Указанный технический результат достигается за счёт того, что в моноколесе, содержащем колёсную часть, электрическую часть, первый амортизатор, второй амортизатор, рамную часть и корпус, причём колёсная часть содержит ось, ступицу, кольцо, обод с постоянными магнитами, шину, две крышки, два подшипника, электрическая часть содержит блок управления, пульт управления, аккумулятор, электромагниты, гироскопический датчик и датчик положения, первый амортизатор содержит соответствующий первому амортизатору цилиндр, соответствующий первому амортизатору шток, первый поршень, второй амортизатор содержит соответствующий второму амортизатору цилиндр, соответствующий второму амортизатору шток, второй поршень, рамная часть содержит раму, содержащую перекладину и две боковые части, и две подножки, при этом ступица закреплена на оси и жёстко соединена с кольцом, которое установлено внутри обода с зазором от него, ось, ступица, кольцо, обод и подшипники установлены соосно, а на ободе размещена шина, крышки закреплены на оси с противоположных сторон от ступицы посредством подшипников и присоединены к ободу, блок управления электрически соединён с пультом управления, электромагнитами, аккумулятором, гироскопическим датчиком и датчиком положения, электромагниты размещены на кольце, гироскопический датчик размещён неподвижно относительно корпуса, а датчик положения закреплён с обеспечением возможности определения положения обода относительно кольца, причём каждый из цилиндров снабжён полостью, заглушённой с обоих его торцов, первый поршень установлен в полости цилиндра первого амортизатора, а второй поршень установлен в полости цилиндра второго амортизатора, с первым поршнем соединён одним концом соответствующий ему шток, а со вторым поршнем соединён одним концом соответствующий ему шток, другой конец каждого из штоков расположен вне соответствующего ему цилиндра, при этом часть полости цилиндра первого амортизатора, расположенная со стороны его штока, заполнена амортизационным газом, а часть полости цилиндра второго амортизатора, расположенная со стороны его штока, заполнена амортизационной жидкостью, при этом второй поршень выполнен с обеспечением возможности перетекания черед него амортизационной жидкости, каждый из цилиндров закреплён неподвижно относительно оси, а каждый шток соединён с рамной частью, боковые части расположены с противоположных сторон колёсной части и с одной своей стороны соединены друг с другом перекладиной, а с другой своей стороны каждая из них соединена с соответствующей ей подножкой, корпус неподвижно закреплён на оси и частично охватывает колёсную часть, в частном случае, ступица жёстко соединена с кольцом посредством спиц, в частном случае, ступица жёстко соединена с кольцом посредством диска, расположенного соосно оси, в частном случае, диск выполнен сплошным, в частном случае, диск выполнен с отверстиями, в частном случае, первый амортизатор и второй амортизатор размещены так, что штоки ориентированы в сторону поверхности, по которой осуществляется движение, в частном случае, первый амортизатор и второй амортизатор размещены так, что штоки ориентированы от поверхности, по которой осуществляется движение, в частном случае, рама, первый амортизатор и второй амортизатор размещены внутри корпуса, в частном случае, рама размещена вне корпуса, а первый амортизатор и второй амортизатор размещены внутри корпуса, в частном случае, рама, первый амортизатор и второй амортизатор размещены вне корпуса.
Краткое описание чертежей
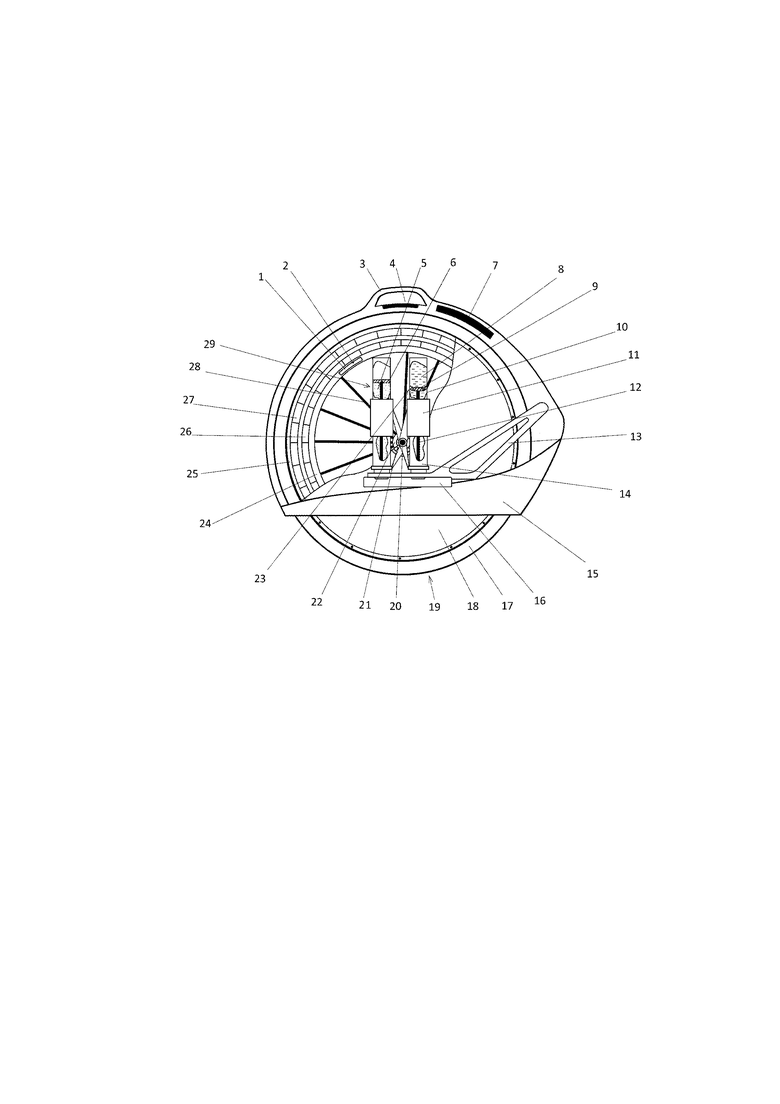
Изобретение поясняется чертежом, где на фиг. показан общий вид устройства.
Раскрытие изобретения
На чертеже обозначены: гироскопический датчик 1, блок управления 2 ручка 3, пульт управления 4, амортизационный газ 5, первый поршень 6, аккумулятор 7, амортизационная жидкость 8, второй поршень 9, цилиндр 10, кронштейн 11, шток 12, рама 13, кожух 14, корпус 15, подножка 16, шина 17, крышка 18, колёсная часть 19, ось 20, подшипник 21, ступица 22, второй амортизатор 23, кольцо 24, обод 25, электромагнит 26, постоянный магнит 27, спица 28, первый амортизатор 29.
Основными элементами устройства являются: колёсная часть 19, два амортизатора – первый амортизатор 29 и второй амортизатор 23 (вместе называемые далее амортизаторы), рама 13, две подножки 16 и корпус 15.
Колёсная часть 19 представляет собой сложное устройство в целом круглой формы, содержащее в своём составе в том числе элемент (совокупность элементов), способный (-х) свободно вращаться вокруг оси устройства. Колёсную часть 19, в данном случае, можно условно разделить на внешнюю подвижную (способную совершать вращение относительно оси) часть и внутреннюю неподвижную (неподвижную относительно оси) часть.
Подвижная часть конструкции состоит из следующих элементов: шина 17, обод 25, постоянные магниты 27 и две крышки 18.
Основой внешней подвижной части колёсной части является обод 25. Обод 25 по форме близок к кольцу, поперечное сечение которого оптимизировано, по крайней мере, для размещения шины 17. На наружной стороне обода 25 (обращённой от оси этой кольцевой формы, совпадающей с осью обода) надета шина 17. Шина 17, в данном случае, представляет собой резиновый обруч или наполненную сжатым воздухом специальную оболочку, надеваемые на обод 25 для увеличения амортизации и улучшения движения (определение приведено в источнике https://dic.academic.ru/dic.nsf/es/65095/шина, дата обращения 07.11.2017). На ободе 25 (или к нему присоединены) с внутренней стороны (противоположной внешней его стороне и обращённой к оси обода 25) установлены постоянные магниты 27. К каждой из боковых сторон обода 25 прикреплена соответствующая крышка 18. Крышки 18 имеют дискообразную или тарелкообразную форму. Каждая крышка 18 в центре имеет специализированное отверстие, в котором установлен подшипник 21 (например, подшипник качения или скольжения). Крышки 18 расположены с противоположных сторон обода 25, к которому они прикреплены по всему своему краю при помощи, например, крепёжных изделий. Таким образом, обод 25 с прикреплёнными к нему крышками 18 образует конструкцию с полостью внутри. В данной полости размещена внутренняя неподвижная часть колёсной части 19.
Внутренняя неподвижная часть колёсной части 19 состоит из оси 20, ступицы 22, спиц 28 (или диска), кольца 24 и электромагнитов 26.
Ось 20 представляет собой стержень, как правило, круглого сечения, который может быть снабжён сквозным отверстием, расположенным вдоль оси стержня. В средней части оси 20 может быть выполнено также отверстие, перпендикулярное оси стрежня. Совокупность двух указанных отверстий обеспечивает вывод проводов из внутренней неподвижной части колёсной части 19 к корпусу 15. Ось 20 закреплена в подшипниках 21 крышек 18, при этом свободные концы оси 20 расположены за пределами области между крышками 18. На оси 20, в её средней части (по длине), закреплена ступица 22. При необходимости между осью 20 и ступицей 22 может быть дополнительна размещена втулка, неподвижно соединённая как с осью 20, так и со ступицей 22. Ступица 22 коаксиальна кольцу 24, имеющим диаметр больше диаметра ступицы 22, и соединена с ним спицами 28 или диском (сплошным или с отверстиями). При этом спицей 28 называют стержень, соединяющий ступицу 22 колеса с кольцом 24 (в соответствии с п.2 Энциклопедического словаря, https://dic.academic.ru/dic.nsf/es/145675/спица, дата обращения 17.11.2017). На внешней поверхности (или в углублениях на этой поверхности) кольца 24, обращённой от оси кольца 24, закреплены электромагниты 26. Размеры кольца 24 подобраны так, чтобы между электромагнитами 26 неподвижной части и постоянными магнитами 27 подвижной части был обеспечен наименьший зазор, обеспечивающий вращение подвижной части относительно неподвижной. Также на кольце 24 (на его боковой поверхности или внутренней поверхности, обращённой к оси) могут быть размещены блок управления 2, обеспечивающий управление элементами устройства, один или несколько гироскопических датчиков 1 (один, два, три или более), а также датчик положения.
Гироскопический датчик 1 представляет собой устройство, содержащее в своём составе гироскоп, обеспечивающий определение положения устройства или его изменение, и передающее данные о положении (его изменении) в блок обработки 2 для дальнейшего использования. Гироскопом (один из его видов) называют механическое устройство с несколькими степенями свободы в виде кардана и быстро вращающегося в нём тяжёлого диска (ротора), при этом ось вращения диска стремится сохранить неизменным своё положение в пространстве при любых поворотах и перемещениях устройства благодаря прецессии (в соответствии с Большой политехнической энциклопедией, https://polytechnic_dictionary.academic.ru/442/ГИРОСКОП, дата обращения 14.11.2017). Также существуют другие типы гироскопов, например, оптические. Для описываемого устройства конкретное исполнение гироскопического датчика 1 может быть различным.
Датчик положения представляет собой элемент, в данном устройстве обеспечивающий определение положения подвижной части относительно неподвижной части. В качестве датчика положения может быть использован датчика Холла, который в общем смысле представляет собой магнитно-электрический полупроводниковый прибор, работа которого основана на использовании гальваномагнитного эффекта – эффекта Холла (сведения о датчике Холла представлены в Политехническом терминологическом толковом словаре https://technical_terminology.academic.ru/850/датчик_Холла, а также на сайте http://krutimotor.ru/ustrojstvo-datchika-xolla/, дата обращения 22.06.2018).
В целом постоянные магниты и электромагниты в совокупности с блоком управления и датчиком положения представляют собой шаговый электродвигатель, применение которого наиболее предпочтительно в данном устройстве из-за высокой точности поворота подвижной части относительно неподвижной и, соответственно, высокой управляемости устройства.
Амортизатор – устройство, используемое в конструкциях для гашения колебаний, вибраций, толчков и ударных нагрузок (определение амортизатора - интернет-ресурс Большая политехническая энциклопедия, 2011г., статья "Амортизатор" https://polytechnic_dictionary.academic.ru/65АМОРТИЗАТОР, дата обращения 04.10.2017). Телескопический амортизатор – это амортизатор, одна группа деталей которого способна совершать поступательные движения вдоль оси симметрии амортизатора относительно другой группы деталей данного амортизатора.
В общем случае устройство содержит два амортизатора: различные по конструкции первый амортизатор 29 и второй амортизатор 23, установленные симметрично относительно колёсной части 19 или с одной стороны от неё для уменьшения габаритных размеров устройства.
При этом первый амортизатор 29 и второй амортизатор 23 также могут быть выполнены телескопическими (именно такое исполнение описано далее).
Первый амортизатор 29 представляет собой элемент, обеспечивающий гашение колебаний за счёт сжатия или расширения амортизационного газа 5. Первый амортизатор 23 состоит из соответствующего цилиндра 10, первого поршня 6 и соответствующего штока 12.
Цилиндр 10, в данном случае, представляет собой полый внутри (т.е. цилиндр 10 снабжён полостью), заглушенный с двух сторон, элемент круглоцилиндрической формы, вытянутый вдоль оси. Цилиндр 10 состоит из соединённых между собой боковой стенки и двух торцевых стенок. Торцевые стенки представляют собой дискообразный элемент расположенный перпендикулярно оси амортизатора. Боковая стенка представляет собой круглоцилиндрическую оболочку, торцы которой заглушены торцевыми стенками. Одна из торцевых стенок имеет отверстие для размещения штока 12, снабжённое уплотнением, предотвращающим перетекание сред через это отверстие.
Первый поршень 6 представляет собой дискообразный элемент, расположенный перпендикулярно оси цилиндра 10 (и, следовательно, первого амортизатора 29) и способный совершать перемещение вдоль оси цилиндра 10. Первый поршень 6 плотно прилегает краями к внутренней стороне боковой стенки. Первый поршень 6 присоединён к одному из концов штока 12. Первый поршень 6 разделяет полость цилиндра 10 на две несообщающиеся части, одна из которых заполнена амортизационным газом 5 под необходимым давлением. Величина давления определяется максимальной преодолеваемой высотой препятствия на поверхности, по которой осуществляется движение, и весом пользователя устройства. Под амортизационным газом 5 следует понимать газ, который используется в амортизаторах для поглощения энергии колебаний, вибраций и т.д.
Шток 12 представляет собой, обычно, металлический стержень. Шток 12 расположен коаксиально оси симметрии первого амортизатора 29 и пропущен в отверстие с уплотнением в торцевой стенке цилиндра 10. Шток 12 одной своей частью обычно расположен внутри той части цилиндра 10, которая заполнена амортизационным газом 5. Другая часть штока 12, предназначенная для прикрепления амортизируемого элемента, размещена за пределами цилиндра 10 и может быть закрыта кожухом 14 (по крайней мере частично). Кожух 14, в данном случае, представляет собой круглоцилиндрическую оболочку, один торец которой закрыт стенкой с отверстием (сквозь которое может проходить шток 12 в случае, если шток 12 частично также расположен за пределами цилиндра 10 и кожуха 14). Одной частью кожух 14 соединён с цилиндром 10. Часть штока 12 расположена в полости кожуха 14 с обеспечением возможности присоединения к свободному концу штока 12 соответствующей части амортизируемого элемента.
Первый амортизатор 29 закреплён неподвижно на оси 20, например, при помощи кронштейна 11. При этом первый амортизатор 29 расположен так, чтобы при наезде на выступающее препятствие происходило сжатие амортизационного газа 5. Обычно первый амортизатор 29 ориентирован концом штока 12, присоединённым к амортизируемому элементу, к поверхности, по которой осуществляется движение, а амортизационный газ 5 находится под первым поршнем 6. Иными словами, амортизационный газ 5 расположен в той части полости цилиндра 10, в которой частично расположен шток 12. Такая ориентация обеспечивает более устойчивое положение пользователя на устройстве вследствие приближения центра тяжести пользователя на устройстве к поверхности. Однако при необходимости шток 12 может быть ориентирован от поверхности. Здесь и далее определения вертикальный, горизонтальный, верх, низ и им подобные даны в соответствии с направлением действия силы тяжести в положении объекта при его стандартном использовании.
Кронштейн 11, в данном случае, состоит из двух цилиндрических элементов и двух вытянутых элементов. Каждый вытянутый элемент может представлять собой металлическую, вытянутую по длине, пластину, или уголок. Одной частью каждый вытянутый элемент жёстко закреплён на одном из свободных концов оси 20 колёсной части 19. Другая часть вытянутого элемента соединена или выполнена заодно с соответствующим цилиндрическим элементом. Один цилиндрический элемент представляет собой вытянутую вдоль своей оси круглоцилиндрическую оболочку, с открытыми торцами. Этот цилиндрический элемент охватывает, фиксируя при этом, нижнюю часть цилиндра 10 первого амортизатора 29, и, следовательно, и верхнюю часть кожуха 14. Другой цилиндрический элемент может быть выполнен в виде кольца, или в виде круглоцилиндрической оболочки малой длины, с открытыми торцами. Последний указанный цилиндрический элемент охватывает, фиксируя при этом, нижнюю часть кожуха 14.
Второй амортизатор 23 представляет собой элемент, обеспечивающий гашение колебаний за счёт перетекания амортизационной жидкости 8, например, масла (но также может быть использован газ), через специальные перепускные отверстия и/или клапаны сжатия. Второй амортизатор 23 состоит из соответствующего цилиндра 10, полость которого заполнена амортизационной жидкостью 8, второго поршня 9 и соответствующего штока 12. Под амортизационной жидкостью 8 в соответствии, например, с ГОСТ 23008-78 "Жидкость амортизаторная АЖ-12т. Технические условия" понимают жидкость (чаще всего масло), применяемую в качестве рабочей жидкости в амортизаторах.
Второй поршень 9 представляет собой деталь цилиндрической формы и снабжён перепускными отверстиями с размещёнными в них клапанами сжатия. Каждое перепускное отверстие перекрыто соответствующим клапаном сжатия. Причём клапаны сжатия выполнены так, что сопротивление протеканию через них амортизационной жидкости 8 в одном направлении больше, чем в другом. При этом клапаны сжатия второго поршня 9 расположены так, чтобы при наезде на выступающее препятствие и сжатии амортизационного газа 5 в первом амортизаторе 29 перетекание амортизационной жидкости 8 через клапаны сжатия происходило с наименьшим сопротивлением. Второй поршень 9 расположен внутри цилиндра 10 и присоединён к одному из концов штока 12. Другой конец штока 12 расположен за пределами цилиндра 10, может быть расположен внутри кожуха 4, как это указано выше, и присоединён к амортизируемому элементу. Второй амортизатор 23 неподвижно закреплён на оси 20, например, при помощи кронштейна 11 аналогично тому, как это указано выше. При этом второй амортизатор 23 ориентирован концом штока 12, присоединённым к амортизируемому элементу, к поверхности, по которой осуществляется движение.
Первый амортизатор 29 и второй амортизатор 23 могут быть расположены с одной стороны или с разных сторон от колёсной части 19. Первый амортизатор 29 и второй амортизатор 23 при расположении с одной стороны должны быть расположены так, чтобы минимизировать несимметричность конструкции устройства.
Амортизируемым элементом в рассматриваемом устройстве является рамная часть, состоящая из соединённых между собой при помощи рамы 13 двух подножек 16.
Рама 13, в данном случае, представляет собой металлическую П-образную конструкцию, состоящую из двух боковых частей и перекладины и охватывающую колёсную часть 19 (рама в целом — плоская или пространственная стержневая система, элементы которой жёстко соединены между собой во всех или некоторых узлах, определение рамы ̶ интернет ресурс Большой энциклопедический словарь, статья "Рама" https://gufo.me/dict/bes/РАМА дата обращения 23.10.2017).
Боковые части её могут иметь форму тупоугольного треугольника. Каждая из боковых частей состоит из трёх последовательно соединённых, с образованием тупоугольного треугольника, металлических труб произвольного сечения (например, прямоугольного или круглого), а также опорной площадки (опорная площадка, в данном случае, это дополнительный элемент, обеспечивающий удобство соединения рамы 13, подножки 16 и штока 12 каждого из амортизаторов). Опорная площадка представляет собой металлическую деталь, имеющую форму параллелепипеда. Одна из вершин тупоугольного треугольника (не являющаяся вершиной тупого угла) усилена и соединена с опорной площадкой. Боковые части соединены между собой перекладиной.
Перекладина, в данном случае, представляет собой металлическую трубу произвольного сечения (например, прямоугольного или круглого). Перекладина соединяет между собой по одной вершине от каждого из тупоугольных треугольников (вершины к которым не прикреплены опорные площадки и вершины, не являющиеся вершинами тупого угла).
К каждой из боковых частей рамы 13 прикреплено по подножке 16. Подножка 16 - составная часть системы опоры тела, служащая для упора ног пользователя (определение подножки - ГОСТ Р ИСО 10535-2010, п.3.13). Подножка 16, в данном случае, представляет собой плоскую металлическую деталь. Каждая подножка 16 соединена с соответствующей ей опорной площадкой посредством поворотной оси.
Корпус 15 представляет собой элемент, частично охватывающий колёсную часть 19, а также защищающий пользователя от контакта с движущимися элементами устройства (корпус – основная деталь изделия, внутри которой помещаются детали его механизма, определение корпуса - интернет ресурс "Словарь строительной терминологии", статья "Корпус", https://gufo.me/dict/building_terms/корпус, дата обращения 31.10.2017). Внутри корпуса 15 могут дополнительно размещать любые элементы устройства за исключением подножек 16 и пульта управления 4 (т.к. пользователь должен непосредственно взаимодействовать с подножками 16 и пультом управления 4). Корпус 15 состоит из двух боковых элементов и среднего элемента. Каждый боковой элемент, в данном случае, имеет форму, близкую к круговому сегменту. Боковые элементы соединены между собой средним элементом. Средний элемент своими краями соединён или выполнен заодно с краями боковых элементов, за исключением краёв, являющихся хордами круговых сегментов. При этом в каждом боковом элементе корпуса 15 выполняют отверстие, обеспечивающее присоединение рамной части (в случае размещения первого амортизатора 29 и второго амортизатора 23 внутри корпуса 15) к штокам 12 амортизаторов или обеспечивающее присоединение амортизаторов к оси 20 (в случае размещения амортизаторов вне корпуса 15). Возможен вариант без выполнения отверстий в боковых элементах корпуса 15, когда взаимное расположение элементов и высота сегмента, определяющего форму корпуса 15, выбраны так, чтобы место соединения штоков 12 амортизаторов и рамной части было расположено со стороны корпуса 15, где отсутствует средний элемент. Корпус 15 своими боковыми элементами неподвижно присоединён к оси 20 так, чтобы боковые элементы были расположены вертикально и ориентированы хордами круговых сегментов вниз. Возможны и другие формы корпуса 15. В другом исполнении боковые элементы могут иметь форму параллелограмма или U-образную форму.
К корпусу 15 прикреплены следующие элементы: ручка 3, пульт управления 4, аккумулятор 7. Ручка 3 прикреплена с внешней стороны среднего элемента (ручка в целом — часть предмета за которую его держат или берут рукой, определение "ручки" – интернет ресурс "Малый академический словарь" статья "ручка" https://gufo.me/dict/mas/ручка, дата обращения 30.10.2017). Пульт управления 4 также закреплён на внешней стороне среднего элемента, в частности, вблизи места расположения ручки 3 (пульт управления - устройство, на котором размещены органы управления электроагрегатом и средства отображения информации о режиме его работы, согласно определение пульта управления по ГОСТ 20375-83 п.32). Аккумулятор 7 размещён внутри корпуса 15 так, чтобы была исключена возможность его повреждения движущимися элементами устройства.
Блок управления 2 соединён с гироскопическим датчиком 1, датчиком положения, пультом управления 4 и электромагнитами 26. Все элементы, требующие для своей работы энергию, соединены с аккумулятором 7. Все соединения выполняют обычно при помощи проводов, при этом провода размещают таким образом, чтобы обеспечить невозможность их повреждения движущимися частями устройства. Электрически соединённые блок управления 2, пульт управления 4, гироскопический датчик 1, электромагниты 26 и аккумулятор 7 образуют электрическую часть устройства.
Осуществление изобретения
В случае использования указанных выше элементов и средств, изобретение реализуется следующим образом.
Почти все элементы устройства являются известными и не требуют отдельного изготовления, например, аккумулятор 7 представлен в источнике https://gowheel.ru/akkumuljatory-dlja-monokoles/, гироскопический датчик 1 - https://educube.ru/products/giroskopicheskiy-datchik-ev3/, https://gowheel.ru/zapchasti_monocolesa/Controller_M1/, шина 17 -https://gowheel.ru/zapchasti_monocolesa/tire_set/, подшипники 21 - http://www.skf.com/ru/products/bearings-units-housings/product-tables/index.html, подножки 16 - https://ecodrift.ru/shop/pedali-kingsong-ks16/ (дата обращения для указанных ссылок 16.11.2017). Также известно устройство, представляющее собой собранную колёсную часть 19 без шины 17 с установленными электромагнитами 26 и выведенными через отверстие в оси 20 проводами для дальнейшего соединения с блоком управления 2 (https://sunwheel.ru/catalog/monokolesa/zapasnye-chasti/dvigatel-dlya-monokolesa.html, дата обращения 16.11.2017).
Отдельно изготавливают раму 13 описанной выше конфигурации (или другой подходящей конфигурации), например, посредством сварки отрезков труб или проката подходящего профиля. При этом на концах боковых частей рамы 13, не соединённых перекладиной, выполняют элементы, обеспечивающие подвижное соединение с подножками 16. Также предварительно изготавливают корпус 15 требуемой конфигурации с ручкой 3, например, путём отливки из полимерного материала. Обычно корпус 15 выполняют разъёмным для упрощения сборки моноколеса.
После подготовки всех составляющих элементов производят сборку моноколеса. Для этого на оси в её средней части неподвижно закрепляют ступицу 22, например, при помощи посадки с натягом, клеевого или шпоночного соединения. При необходимости (например, для повышения прочности конструкции) между ступицей 22 и осью 20 могут дополнительно размещать втулку, также при этом обеспечивая относительную неподвижность ступицы 22 и оси 20. Затем на ступице 22 неподвижно закрепляют кольцо 24 при помощи необходимого количества спиц 28 или диска, при этом соединение кольца 24 и каждой из спиц 28 (или диска) и соединение ступицы 22 и каждой из спиц 28 (диска) обеспечивают относительную неподвижность указанных элементов. Применение диска вместо спиц 28 обеспечивает упрощение процесса монтажа вследствие того, что для закрепления кольца 24 на ступице 22 требуется только один диск, а спиц 28 необходимо минимум три. В случае применения диска диск с отверстиями более предпочтителен, т.к. обеспечивает уменьшение материалоёмкости устройства. Затем на кольце 24 неподвижно закрепляют необходимое количество электромагнитов 26, каждый из которых представляет собой сердечник с обмоткой. Обычно электромагниты 26 размещают на стороне кольца 24, обращённой от оси 20, чтобы снизить потери при создании магнитного поля с требуемыми характеристиками в области расположения постоянных магнитов 27. Провода от электромагнитов 26 размещают в предназначенных для этого отверстиях в оси 20 так, чтобы их свободные концы выходили из отверстия, расположенного вдоль оси 20. Также на кольце 24, на диске или на спицах 28 могут разместить один или несколько из следующих элементов электрической части: блок управления 2, гироскопический датчик 1, датчик положения, аккумулятор 7. Эти элементы электрической части соединяют между собой (и, при необходимости, с электромагнитами 26) проводами, как это описано выше, и провода выводят так же, как провода от электромагнитов 26. На ободе 25, обычно на обращённой к оси 20 стороне, закрепляют необходимое количество постоянных магнитов 27, причём полюса соседних постоянных магнитов 27 ориентированы в противоположном направлении (один постоянный магнит 27 ориентирован северным полюсом к оси, а соседние с ним – от оси). Обод 25 с постоянными магнитами 27 размещают так, чтобы он охватывал кольцо 24 с электромагнитами 26 и был расположен с кольцом 24 с электромагнитами 26 в одной (почти в одной) плоскости. При этом между ободом 25 с постоянными магнитами 27 и кольцом 24 с электромагнитами 26 обеспечивают наличие зазора, позволяющего свободно вращаться ободу 25 с постоянными магнитами 27 вокруг кольца 24 с электромагнитами 26 и обеспечивающего требуемую силу взаимодействия между электромагнитами 26 и постоянными магнитами 27. С противоположных сторон от ступицы 22 на оси 20 закрепляют подшипники 21, установленные в крышках 18. По своему краю каждую крышку 18 присоединяют к ободу при помощи, например, винтов. Затем на обод 25 надевают шину 17 и заполняют её сжатым воздухом. В результате получают собранную колёсную часть 19 с установленными электромагнитами 26.
Далее порядок сборки зависит от того, расположены амортизаторы и рама 13 внутри корпуса 15 или вне корпуса 15. Подробно описан далее только случай, когда и амортизаторы, и рама 13 расположены внутри корпуса 15.
Амортизаторы неподвижно закрепляют на оси 20, с противоположных сторон от колёсной части 19 или с одной стороны от неё, при помощи, например, кронштейнов 11, как это описано выше. При этом обычно амортизаторы ориентируют в положении, близком к вертикальному, чтобы обеспечить минимальный изгиб штоков 12, т.е. вертикально. Также амортизаторы обычно располагают так, чтобы штоки 12 были ориентированы к поверхности, по которой осуществляют движение на моноколесе. Такое положение амортизаторов обеспечивает расположение подножек 16 ближе к поверхности, по которой осуществляют движение, чем в случае ориентации штоков 12 от этой поверхности. Соответственно, центр тяжести пользователя на моноколесе расположен ближе к поверхности, что обеспечивает большую устойчивость.
К свободному концу каждого из штоков 12 неподвижно присоединяют опорную площадку, предназначенную для присоединения к ней подножки 16 и рамы 13 концом боковой части, противоположным перекладине. Опорная площадка может отсутствовать, тогда к штоку 12 присоединяют раму 13. После присоединения рамы 13 к штокам 12 непосредственно или через опорную площадку, рама 13 своей перекладиной может быть ориентирована в сторону движения (имеется в виду движение вперёд) или против движения.
Затем внутри корпуса 15 размещают неустановленные элементы электрической части, при этом все они должны быть размещены без возможности повреждения вращающимся ободом 25 с шиной 17, а пульт управления 4 также должен быть размещён в зоне, где пользователь может с ним взаимодействовать. Стоит отметить, что конкретное расположение элементов электрической части, за исключением электромагнитов 26 и пульта управления 4, не является принципиальным при условии их неподвижного расположения относительно оси 20. Все элементы электрической части электрически соединяют между собой так, как это описано выше, и обеспечивают размещение всех проводов без возможности их повреждения вращающимся ободом 25 с шиной 17. Затем корпус 15 с ручкой 3 неподвижно закрепляют на оси 20 так, чтобы внутри корпуса 15 была частично размещена колёсная часть 15 с установленными электромагнитами 26, амортизаторами и рамой 13. В последнюю очередь к раме 13, штокам 12 или опорным площадкам присоединяют подножки 16. Каждую подножку 16 присоединяют с обеспечением возможности нахождения подножки 16 в двух положениях (параллельно оси и перпендикулярно оси) при помощи, например, стержня, обеспечивающего поворот подножки 16. При этом рама 13 обеспечивает жёсткое соединение подножек 16 между собой, что положительно сказывается на управляемости моноколеса.
В случае размещения амортизаторов и рамы 13 внутри корпуса 15 повышается безопасность использования моноколеса вследствие уменьшения количества элементов, с которыми может контактировать пользователь (например, отсутствует возможность зацепления одежды пользователя за элементы). В случае размещения рамы 13 вне корпуса 15 увеличивается проходимость моноколеса вследствие того, что рама 13 позволяет преодолевать пользователю на моноколесе более высокие препятствия.
Моноколесо используют следующим образом. Вращение обода 25 с шиной 17 и постоянными магнитами 27 вокруг оси 20 обеспечивают за счёт взаимодействия магнитных полей постоянных магнитов 27 и электромагнитов 26 при протекании электрического тока от аккумулятора 7 через электромагниты 26. При этом величина и направление электрического тока определяется взаимным положением подвижной части и неподвижной части, определяемым датчиком положения, и положением моноколеса в пространстве, которое определяется гироскопическим датчиком 1 (или несколькими гироскопическими датчиками). Сигналы с данными об указанных положениях направляются от гироскопического датчика 1 и от датчика положения в блок управления 2, который в свою очередь направляет управляющий сигнал электромагнитам 26. Использование такого принципа передачи вращения ободу 25 с шиной 17 более предпочтительно, чем при помощи вращающихся роликов между ободом 25 и кольцом 24, вследствие меньшей чувствительности к попаданию инородных микрочастиц, и, следовательно, большей надёжности.
Движение моноколеса по поверхности обеспечивается при контакте шины 17 с поверхностью и вращении обода 25 с шиной 17 и постоянными магнитами 27 вокруг оси 20. Повороты при движении на моноколесе выполняют при помощи наклона моноколеса в сторону, вызванного перераспределением веса пользователя между подножками 16. Пользователь при движении стоит на подножках 16. Однако пользователь может использовать устройство в любом другом удобном положении, например, сидя. При этом в конструкцию устройства добавляют соответствующие дополнительные элементы, например, сиденье. При движении пользователя на моноколесе по неровной поверхности происходит гашение (уменьшение амплитуды) механических колебаний, возникающих из-за движения по неровной поверхности и передаваемых от колёсной части 19 на подножки 16. Это связано с тем, что подножки 16 соединены с осью 20 колёсной части 19 не напрямую, а через амортизаторы, в которых гашение колебаний обеспечивается изменением объёма амортизационного газа 5 и перетеканием амортизационной жидкости 8. При этом подножки 16 жёстко связаны между собой рамой 13, вследствие чего сохраняется такая же управляемость моноколеса при поворотах, как и при отсутствии амортизаторов. Если рама 13 отсутствует, то не обеспечивается одинаковое относительное расположение подножек 16 между собой, и, соответственно, наклон моноколеса однозначно не соответствует перераспределению веса, которое задано пользователем.
Таким образом, наличие первого амортизатора 29 и второго амортизатора 23, соединяющих ось 20 колёсной части 19 с подножками 16, и рамы 13, жёстко соединяющей подножки 16, обеспечивает повышение безопасности использования моноколеса. Вызвано это тем, что первый амортизатор 29 и второй амортизатор 23 гасят колебания, возникающие при движении на моноколесе по неровной поверхности, при сохранении управляемости моноколеса за счёт жёсткой связи подножек 16, вследствие чего снижается вероятность падения пользователя. Дополнительно повышает безопасность установка амортизаторов так, чтобы штоки 12 были ориентированы к поверхности, по которой осуществляется движение. Причины этого в следующем. С одной стороны, в случае такой установки амортизаторов, подножки 16, на которые опирается пользователь, расположены ближе к поверхности, т.е. центр тяжести пользователя на моноколесе также расположен ближе к поверхности, следовательно, устойчивость и безопасность пользователя на моноколесе повышается.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРЕСЛО-КОЛЯСКА | 2005 |
|
RU2271187C1 |
| Высокоподвижный исследовательский планетоход | 2022 |
|
RU2780069C1 |
| Колесно-лопастной движитель транспортного средства | 2019 |
|
RU2711134C1 |
| ЖЕЛЕЗНОДОРОЖНОЕ КОЛЕСО-№1 ВС | 2005 |
|
RU2303533C1 |
| ТЕЛЕЖКА ПУТЕИЗМЕРИТЕЛЬНАЯ | 2005 |
|
RU2303541C2 |
| КОЛЯСКА ДЛЯ ЛИЦ С ОГРАНИЧЕННЫМИ ФИЗИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2024 |
|
RU2840843C1 |
| Моноколесо (варианты) и система амортизации для моноколеса (варианты) | 2022 |
|
RU2793975C1 |
| Защитный автоматический клапан | 2021 |
|
RU2753787C1 |
| Система аварийных баллонетов вертолета | 2021 |
|
RU2767566C1 |
| Подножка транспортного средства | 2023 |
|
RU2817227C1 |
Изобретение относится к области машиностроения, в частности к моноколесам. Моноколесо содержит колёсную, электрическую и рамную части, первый и второй амортизаторы и корпус. Колёсная часть содержит ось, ступицу, кольцо, обод с постоянными магнитами, шину, две крышки, два подшипника. Электрическая часть содержит блок управления, пульт управления, аккумулятор, электромагниты, гироскопический датчик и датчик положения. Амортизатор содержит цилиндр, шток, поршень. Рамная часть содержит раму, содержащую перекладину, две боковые части и две подножки. Блок управления электрически соединён с пультом управления, электромагнитами, аккумулятором, гироскопическим датчиком и датчиком положения. Электромагниты размещены на кольце. Часть полости цилиндра первого амортизатора заполнена амортизационным газом. Часть полости цилиндра второго амортизатора заполнена амортизационной жидкостью. Второй поршень выполнен с обеспечением возможности перетекания черед него амортизационной жидкости. Достигается повышение безопасности. 9 з.п. ф-лы, 1 ил.
1. Моноколесо, содержащее колёсную часть, электрическую часть, первый амортизатор, второй амортизатор, рамную часть и корпус, причём колёсная часть содержит ось, ступицу, кольцо, обод с постоянными магнитами, шину, две крышки, два подшипника, электрическая часть содержит блок управления, пульт управления, аккумулятор, электромагниты, гироскопический датчик и датчик положения, первый амортизатор содержит соответствующий первому амортизатору цилиндр, соответствующий первому амортизатору шток, первый поршень, второй амортизатор содержит соответствующий второму амортизатору цилиндр, соответствующий второму амортизатору шток, второй поршень, рамная часть содержит раму, содержащую перекладину и две боковые части, и две подножки, при этом ступица закреплена на оси и жёстко соединена с кольцом, которое установлено внутри обода с зазором от него, ось, ступица, кольцо, обод и подшипники установлены соосно, а на ободе размещена шина, крышки закреплены на оси с противоположных сторон от ступицы посредством подшипников и присоединены к ободу, блок управления электрически соединён с пультом управления, электромагнитами, аккумулятором, гироскопическим датчиком и датчиком положения, электромагниты размещены на кольце, гироскопический датчик размещён неподвижно относительно корпуса, а датчик положения закреплён с обеспечением возможности определения положения обода относительно кольца, причём каждый из цилиндров снабжён полостью, заглушённой с обоих его торцов, первый поршень установлен в полости цилиндра первого амортизатора, а второй поршень установлен в полости цилиндра второго амортизатора, с первым поршнем соединён одним концом соответствующий ему шток, а со вторым поршнем соединён одним концом соответствующий ему шток, другой конец каждого из штоков расположен вне соответствующего ему цилиндра, при этом часть полости цилиндра первого амортизатора, расположенная со стороны его штока, заполнена амортизационным газом, а часть полости цилиндра второго амортизатора, расположенная со стороны его штока, заполнена амортизационной жидкостью, при этом второй поршень выполнен с обеспечением возможности перетекания черед него амортизационной жидкости, каждый из цилиндров закреплён неподвижно относительно оси, а каждый шток соединён с рамной частью, боковые части расположены с противоположных сторон колёсной части и с одной своей стороны соединены друг с другом перекладиной, а с другой своей стороны каждая из них соединена с соответствующей ей подножкой, корпус неподвижно закреплён на оси и частично охватывает колёсную часть.
2. Моноколесо по п.1, отличающееся тем, что ступица жёстко соединена с кольцом посредством спиц.
3. Моноколесо по п.1, отличающееся тем, что ступица жёстко соединена с кольцом посредством диска, расположенного соосно оси.
4. Моноколесо по п.3, отличающееся тем, что диск выполнен сплошным.
5. Моноколесо по п.3, отличающееся тем, что диск выполнен с отверстиями.
6. Моноколесо по п.1, отличающееся тем, что первый амортизатор и второй амортизатор размещены так, что штоки ориентированы в сторону поверхности, по которой осуществляется движение.
7. Моноколесо по п.1, отличающееся тем, что первый амортизатор и второй амортизатор размещены так, что штоки ориентированы от поверхности, по которой осуществляется движение.
8. Моноколесо по п.1, отличающееся тем, что рама, первый амортизатор и второй амортизатор размещены внутри корпуса.
9. Моноколесо по п.1, отличающееся тем, что рама размещена вне корпуса, а первый амортизатор и второй амортизатор размещены внутри корпуса.
10. Моноколесо по п.1, отличающееся тем, что рама, первый амортизатор и второй амортизатор размещены вне корпуса.
| CN 204250249 U, 08.04.2015 | |||
| US 20110191013 A1, 04.08.2011 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| ТРАНСПОРТНЫЙ МОДУЛЬ | 2014 |
|
RU2570513C1 |

