Область техники, к которой относится изобретение
Изобретение относится к области машиностроения, в частности, к многоканальному прибору для измерения и анализа вибрационных параметров роторов, и может быть использовано в измерительной технике для измерения и анализа вибрационных процессов, возникающих при эксплуатации различных тел вращения, например, валов, роторов электродвигателей и так далее.
Уровень техники
Известно устройство по способу вибрационного контроля подшипников качения, заключающийся в измерении вибрации невращающегося кольца контролируемого подшипника на частоте, обусловленной дефектом подшипника, при этом при измерении вибрации невращающегося кольца создают вынужденные колебания вращающегося кольца на той же частоте и по изменению вибрации невращающегося кольца определяют характер и величину дефекта (см. а.с. SU №1038819, МПК G01М 13/04, опубл. 30.08.1983 г.).
Недостатком данного устройства является сложность конструкции, его невысокая надежность способа вибрационного контроля подшипников качения.
Известно устройство по способу диагностики подшипников скольжения роторных машин, заключающийся в регистрации радиальных колебаний вращающегося вала с последующей диагностикой подшипников по этим колебаниям, при этом с целью повышения качества в неустановившемся режиме регистрируют в момент механического контакта цапфы и подшипника координаты положения центра вала (см. а.с. SU №1247707, МПК G01М 13/04, опубл. 30.07.1986 г.).
Недостатком данного устройства является сложность конструкции, его невысокая надежность способа диагностики подшипников скольжения роторных машин.
Известно устройство по способу вибрационной диагностики роторных систем, включающий в себя измерение параметров вибрационного процесса работающего агрегата и сравнение получаемых параметров с этими же величинами, замеренными в первоначальном состоянии, при этом характеристики вибрации регистрируют в двух направлениях: вертикальном и горизонтальном по отношению к оси вращения ротора, полученные данные сохраняют в компьютере в оцифрованном виде, при этом проводят кепстральный анализ вибрационного процесса, заключающегося в получении кепстра виброскорости в окресностях частоты вращения ротора, а затем лифтрации в вертикальном направлении, и по количеству пиков в кепстре судят о появлении усталостной трещины и ее глубине (см. пат. RU №2356021, МПК G01M 7/02, опубл. 20.05.2009 г.).
Недостатком данного устройства является его невысокая точность вибрационной диагностики роторных систем.
Наиболее близким по технической сущности и достигаемому положительному эффекту и принятое авторами за прототип является устройство для измерения и анализа вибрационных параметров ротора, включающий восемь входных разъемов, аналого-цифровой преобразователь (АЦП), модуль осевого сдвига, модуль формирования образцовых сигналов и управления, персональный компьютер (ПК) (см. Виброакустическая диагностика зарождающихся дефектов./ Под общей ред. М.Д. Генкина - М.: Наука, 1984. Генкин М.Д., Соколов А.Г. Виброакустическая диагностика машин и механизмов. - М.: Машиностроение, 1988.).
Недостатком данного устройства является его невысокая надежность.
Раскрытие изобретения
Задачей предлагаемого изобретения является разработка многоканального прибора для измерения и анализа вибрационных параметров роторов, обладающего повышением точности измерения параметров ротора и проведением обслуживания и предотвращения повреждения машины.
Технический результат, который может быть достигнут с помощью предлагаемого изобретения, сводится к повышению точности измерения параметров ротора.
Технический результат достигается с помощью многоканального прибора для измерения и анализа вибрационных параметров роторов, содержащего восемь входных разъемов, аналого-цифровой преобразователь (АЦП), модуль осевого сдвига, модуль формирования образцовых сигналов и управления, персональный компьютер (ПК), при этом он дополнительно снабжен модулем нормализации сигнала, при этом входной разъем 1 соединен с АЦП 3; входной разъем 2 соединен с АЦП 3; входной разъем 4 соединен со входом модуля 5 формирования фазовых меток, выход которого соединен с АЦП 3; входной разъем 6 соединен совходом модуля 7 осевого сдвига, выход которого соединен с АЦП 3; входной разъем 8 соединен с одним из входов модуля 9 нормализации сигнала, выход которого соединен с АЦП 3; входной разъем 10 соединен с одним из входов модуля 11 нормализации сигнала, выход которого соединен с АЦП 3; входной разъем 12 соединен с одним из входов модуля 13 нормализации сигнала, выход которого соединен с АЦП 3; входной разъем 14 соединен с одним из входов модуля 15 нормализации сигнала, выход которого соединен с АЦП 3, а выход АЦП 3 соединен со входом персонального компьютера 16; первый управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляющим входом модуля 7 осевого сдвига, второй управляющий выход соединен с управляющим входом модуля 9 нормализации сигнала, третий управляющий выход соединен с управляющим входом модуля 11 нормализации сигнала, четвертый управляющий выход соединен с управляющим входом модуля 13 нормализации сигнала, а пятый управляющий выход соединен с управляющим входом модуля 15 нормализации сигнала, и, кроме того, первый выход модуля 17 формирования образцовых сигналов и управления соединен с одним из входов модуля 9 нормализации сигнала, второй выход соединен с одним из входов модуля 11 нормализации сигнала, третий выход соединен с одним из входов модуля 13 нормализации сигнала и четвертый выход соединен с одним из входов модуля 15 нормализации сигнала, входной разъем 8 присоединяется к расположенным в модуле 9 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и со входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал с первого выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен со входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен со входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом второй управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 9 нормализации сигнала, входной разъем 10 присоединяется к расположенным в модуле 11 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и со входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал со второго выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен со входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен со входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом третий управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 11 нормализации сигнала, входной разъем 12 присоединяется к расположенным в модуле 13 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и со входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал с третьего выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен со входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен со входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом четвертый управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 13 нормализации сигнала, входной разъем 14 присоединяется к расположенным в модуле 15 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и со входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал с четвертого выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен со входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен со входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом пятый управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 15 нормализации сигнала.
Краткое описание чертежей
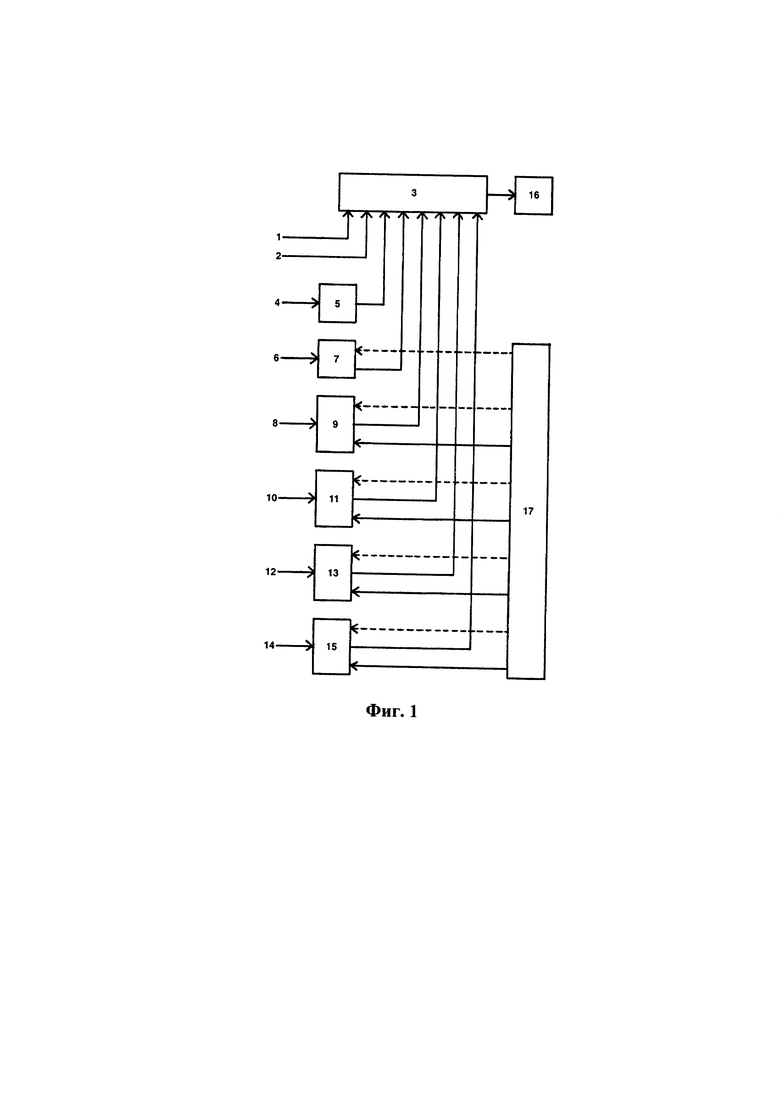
На фиг. 1 дан многоканальный прибор для измерения и анализа вибрационных параметров роторов, общий вид, структурная схема.
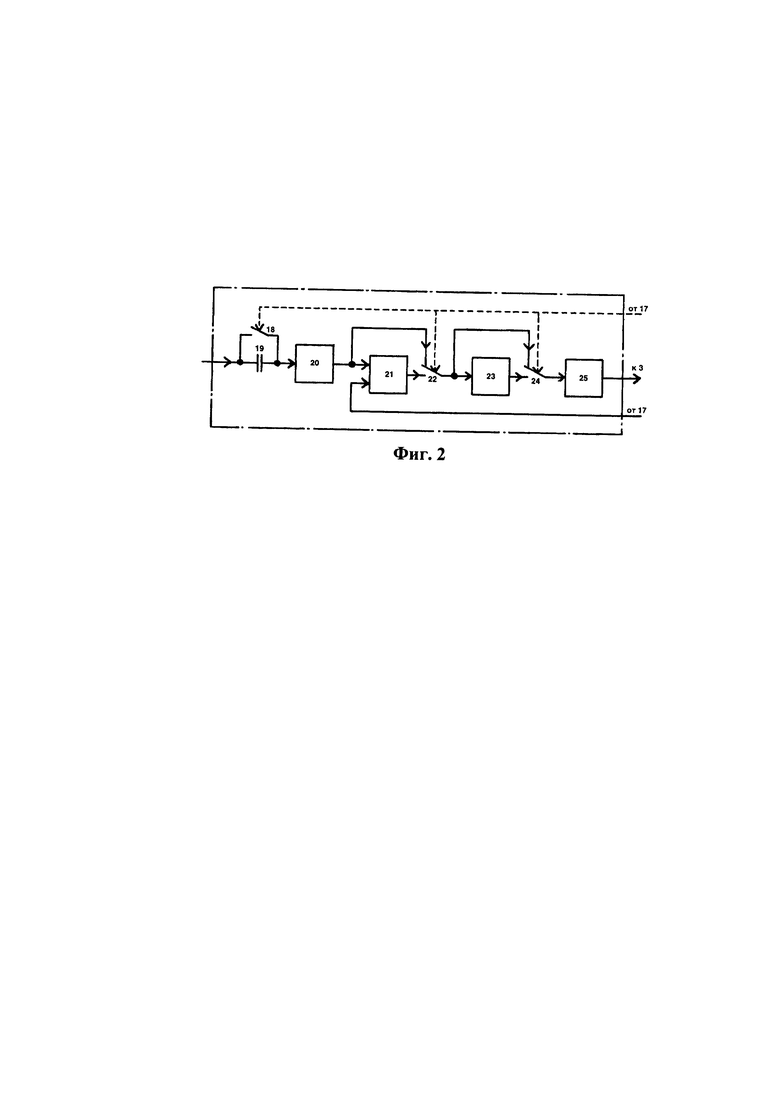
На фиг. 2, тоже, структурная схема модуля нормализации сигнала.
Осуществление изобретения
Многоканальный прибор для измерения и анализа вибрационных параметров роторов, в котором входной разъем 1 соединен с АЦП 3; входной разъем 2 соединен с АЦП 3; входной разъем 4 соединен со входом модуля 5 формирования фазовых меток, выход которого соединен с АЦП 3; входной разъем 6 соединен со входом модуля 7 осевого сдвига, выход которого соединен с АЦП 3; входной разъем 8 соединен с одним из входов модуля 9 нормализации сигнала, выход которого соединен с АЦП 3; входной разъем 10 соединен с одним из входов модуля 11 нормализации сигнала, выход которого соединен с АЦП 3; входной разъем 12 соединен с одним из входов модуля 13 нормализации сигнала, выход которого соединен с АЦП 3; входной разъем 14 соединен с одним из входов модуля 15 нормализации сигнала, выход которого соединен с АЦП 3, а выход АЦП 3 соединен со входом персонального компьютера 16; первый управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляющим входом модуля 7 осевого сдвига, второй управляющий выход соединен с управляющим входом модуля 9 нормализации сигнала, третий управляющий выход соединен с управляющим входом модуля 11 нормализации сигнала, четвертый управляющий выход соединен с управляющим входом модуля 13 нормализации сигнала, а пятый управляющий выход соединен с управляющим входом модуля 15 нормализации сигнала, и, кроме того, первый выход модуля 17 формирования образцовых сигналов и управления соединен с одним из входов модуля 9 нормализации сигнала, второй выход соединен с одним из входов модуля 11 нормализации сигнала, третий выход соединен с одним из входов модуля 13 нормализации сигнала и четвертый выход соединен с одним из входов модуля 15 нормализации сигнала.
Входной разъем 8 присоединяется к расположенным в модуле 9 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и со входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал с первого выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен со входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен со входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом второй управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 9 нормализации сигнала.
Входной разъем 10 присоединяется к расположенным в модуле 11 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и со входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал со второго выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен со входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен со входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом третий управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 11 нормализации сигнала.
Входной разъем 12 присоединяется к расположенным в модуле 13 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и со входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал с третьего выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен со входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен со входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом четвертый управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 13 нормализации сигнала.
Входной разъем 14 присоединяется к расположенным в модуле 15 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и со входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал с четвертого выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен со входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен со входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом пятый управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 15 нормализации сигнала.
Многоканальный прибор для измерения и анализа вибрационных параметров роторов работает следующим образом.
Сигналы произвольной формы, поступающие на независимые входы 1 и 2 (фиг. 1), без изменения проходят на соответствующие входы преобразователя 3 аналого-цифрового (АЦП); сигнал с внешнего тахометрического датчика поступает на вход 4, далее подается на вход модуля 5 формирования фазовых меток, с выхода которого полученный сигнал поступает на отдельный вход АЦП 3; сигнал с внешнего датчика осевого сдвига поступает на вход 6, далее подается на вход модуля 7 осевого сдвига, с выхода которого полученный сигнал поступает на отдельный вход АЦП 3; сигнал с датчика вертикальной составляющей вибрации в первой опоре ротора, поступающий на вход 8, подается далее на вход модуля 9 нормализации сигнала, с выхода которого полученный сигнал поступает на отдельный вход АЦП 3; сигнал с датчика горизонтальной составляющей вибрации в первой опоре ротора, поступающий на вход 10, подается далее на вход модуля 11 нормализации сигнала, идентичного модулю 9, с выхода которого полученный сигнал поступает на отдельный вход АЦП 3; сигнал с датчика вертикальной составляющей вибрации во второй опоре ротора, поступающий на вход 12, подается далее на вход модуля 13 нормализации сигнала, идентичного модулю 9, с выхода которого полученный сигнал поступает на отдельный вход АЦП 3; сигнал с датчика горизонтальной составляющей вибрации во второй опоре ротора, поступающий на вход 14, подается далее на вход модуля 15 нормализации сигнала, идентичного модулю 9, с выхода которого полученный сигнал поступает на отдельный вход АЦП 3; с выхода АЦП 3 цифровой сигнал по последовательной шине USB поступает в персональный компьютер (ноутбук) 16, где производится запись полученных данных в память, их программная обработка и визуализация; модуль 17 формирования образцовых сигналов и управления вырабатывает ряд стабилизированных напряжений разной амплитуды отрицательной полярности, используемых для компенсации эффекта «всплытия» ротора на масляном клине, соответствующих рабочей точке используемых совместно с прибором датчиков вибрации, и осуществляет индивидуальную точную подстройку компенсирующих напряжений, которые далее подаются на соответствующие входы модулей 9, 11, 13 и 15 нормализации сигнала; кроме того, в модуле 17 формирования образцовых сигналов и управления производится переключение режимов работы модуля 7 осевого сдвига и модулей 9, 11, 13, 15 нормализации сигнала (на фиг. 1 и фиг. 2) цепи управления коммутационными элементами показаны пунктирными линиями).
Взаимно идентичные модули 9, 11, 13 и 15 нормализации сигнала (фиг. 2), в зависимости от состояния находящихся в них коммутаторов, могут работать в двух основных режимах.
Режим 1: модули нормализации работают в режиме «закрытый вход». При этом входной сигнал последовательно проходит через емкость 19 разделительную, каскад 20 буферный помехоподавляющий, коммутатор 22, далее сигнал может проходить либо через инвертор 23 с единичным коэффициентом усиления, что может потребоваться, если датчик вибрации в данном измерительном канале конструктивно установлен с противоположной стороны по отношению к аналогичному датчику на другой опоре ротора и требуется инверсия фазы его сигнала, либо в обход инвертора 23 через коммутатор 24 на вход усилителя 25 фильтрующего, в котором обрезаются высокочастотные паразитные составляющие сигнала, и далее полученный сигнал идет на соответствующий вход АЦП 3.
Режим 2: модули нормализации работают в режиме компенсации эффекта «всплытия» ротора на масляном клине, который проявляется тем сильнее, чем выше угловая скорость вращения ротора. В этом режиме входной сигнал последовательно проходит через замкнутые контакты коммутатора 18, каскад 20 буферный помехоподавляющий, выпрямляется при помощи выпрямителя 21 прецизионного суммирующего, на второй вход которого подается отрицательное постоянное напряжение компенсации с соответствующего выхода модуля 17 формирования образцовых сигналов и управления; результирующий сигнал, в котором скомпенсирована (отсутствует) постоянная составляющая, через коммутатор 22 идет либо через инвертор 23, либо в обход инвертора 23 через коммутатор 24 на вход усилителя 25 фильтрующего, полученный сигнал поступает на соответствующий вход АЦП 3.
Поступающие с выхода АЦП 3 на вход персонального компьютера (ноутбука) 16 цифровые данные при помощи соответствующего программного обеспечения структурируются и сохраняются, что позволяет в нужный момент проводить их анализ, например, спектральный анализ, вейвлет-преобразования или организовать пространственную визуализацию многомерных колебаний на дисплее, на основании чего формируется обоснованное диагностическое заключение о состоянии исследуемого ротора, его опор и подшипников, что позволяет вовремя провести обслуживание и предотвратить возможное повреждение машины (агрегата).
Питается многоканальный прибор для измерения и анализа вибрационных параметров роторов от встроенного источника бесперебойного питания (на схемах не показан). Внутри корпуса прибора измерительная часть размещена отдельно от источника бесперебойного питания и отделена от него металлическим экраном.
Предлагаемое изобретение по сравнению с прототипом и другими известными техническими решениями имеет следующие преимущества:
- повышение точности измерения параметров ротора;
- своевременное проведение обслуживания машины;
- предотвращение возможного повреждения машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналоговый имитатор флюидных цепей | 1981 |
|
SU1200855A3 |
| Устройство измерения и контроля параметров радиоэлементов с самокоррекцией | 1989 |
|
SU1691776A1 |
| ИМПУЛЬСНО-МОДУЛИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1991 |
|
RU2012989C1 |
| РЕЗОНАНСНЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ | 1993 |
|
RU2072619C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОМПЛЕКСА КОРАБЕЛЬНОЙ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 1998 |
|
RU2124260C1 |
| Аналого-цифровой преобразователь | 1987 |
|
SU1481887A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С АВТОНОМНЫМ ИНДУКТОРОМ | 2005 |
|
RU2291548C1 |
| Прибор для измерения параметров вибрации | 2024 |
|
RU2831263C1 |
| ЧАСТОТНЫЙ МАНИПУЛЯТОР С МИНИМАЛЬНЫМ ЧАСТОТНЫМ СДВИГОМ | 2018 |
|
RU2694479C1 |
Использование: для измерения и анализа вибрационных параметров роторов. Сущность изобретения заключается в том, что многоканальный прибор для измерения и анализа вибрационных параметров роторов, в котором входной разъем 1 соединен с АЦП 3, входной разъем 2 соединен с АЦП 3, входной разъем 4 соединен с входом модуля 5 формирования фазовых меток, выход которого соединен с АЦП 3, входной разъем 6 соединен с входом модуля 7 осевого сдвига, выход которого соединен с АЦП 3, входной разъем 8 соединен с одним из входов модуля 9 нормализации сигнала, выход которого соединен с АЦП 3, входной разъем 10 соединен с одним из входов модуля 11 нормализации сигнала, выход которого соединен с АЦП 3, входной разъем 12 соединен с одним из входов модуля 13 нормализации сигнала, выход которого соединен с АЦП 3, входной разъем 14 соединен с одним из входов модуля 15 нормализации сигнала, выход которого соединен с АЦП 3, а выход АЦП 3 соединен с входом персонального компьютера 16, первый управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляющим входом модуля 7 осевого сдвига, второй управляющий выход соединен с управляющим входом модуля 9 нормализации сигнала, третий управляющий выход соединен с управляющим входом модуля 11 нормализации сигнала, четвертый управляющий выход соединен с управляющим входом модуля 13 нормализации сигнала, а пятый управляющий выход соединен с управляющим входом модуля 15 нормализации сигнала, и, кроме того, первый выход модуля 17 формирования образцовых сигналов и управления соединен с одним из входов модуля 9 нормализации сигнала, второй выход соединен с одним из входов модуля 11 нормализации сигнала, третий выход соединен с одним из входов модуля 13 нормализации сигнала, и четвертый выход соединен с одним из входов модуля 15 нормализации сигнала, входной разъем 8 присоединяется к расположенным в модуле 9 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и с входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал с первого выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен с входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен с входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом второй управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 9 нормализации сигнала, входной разъем 10 присоединяется к расположенным в модуле 11 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и с входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал со второго выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен с входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен с входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом третий управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 11 нормализации сигнала, входной разъем 12 присоединяется к расположенным в модуле 13 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и с входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал с третьего выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен с входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен с входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом четвертый управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 13 нормализации сигнала, входной разъем 14 присоединяется к расположенным в модуле 15 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и с входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал с четвертого выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен с входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен с входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом пятый управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 15 нормализации сигнала. Технический результат, который может быть достигнут с помощью предлагаемого изобретения, сводится к повышению точности измерения параметров ротора. 2 ил.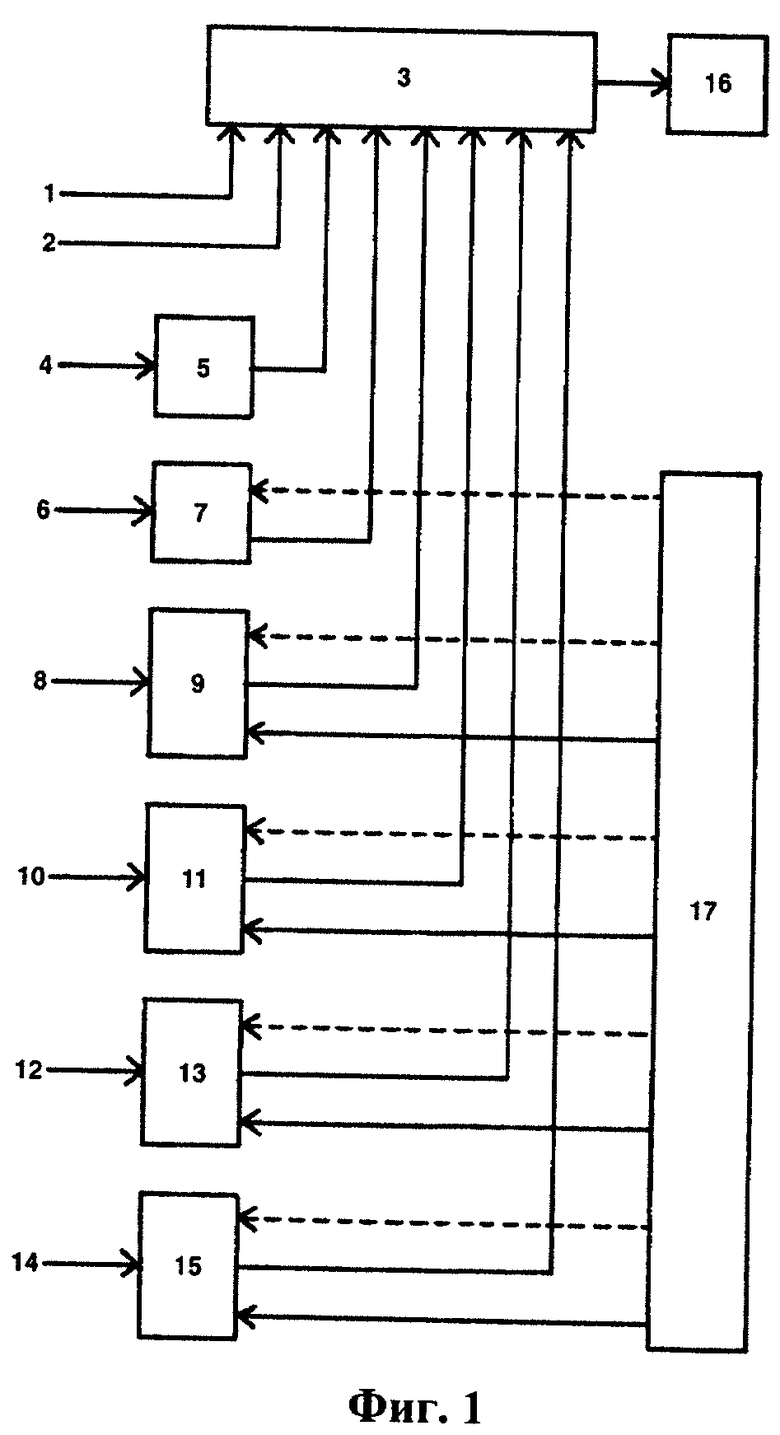
Многоканальный прибор для измерения и анализа вибрационных параметров роторов, содержащий восемь входных разъемов, аналого-цифровой преобразователь (АЦП), модуль осевого сдвига, модуль формирования образцовых сигналов и управления, персональный компьютер (ПК), отличающийся тем, что он дополнительно снабжен модулем нормализации сигнала, при этом входной разъем 1 соединен с АЦП 3, входной разъем 2 соединен с АЦП 3, входной разъем 4 соединен с входом модуля 5 формирования фазовых меток, выход которого соединен с АЦП 3, входной разъем 6 соединен с входом модуля 7 осевого сдвига, выход которого соединен с АЦП 3, входной разъем 8 соединен с одним из входов модуля 9 нормализации сигнала, выход которого соединен с АЦП 3, входной разъем 10 соединен с одним из входов модуля 11 нормализации сигнала, выход которого соединен с АЦП 3, входной разъем 12 соединен с одним из входов модуля 13 нормализации сигнала, выход которого соединен с АЦП 3, входной разъем 14 соединен с одним из входов модуля 15 нормализации сигнала, выход которого соединен с АЦП 3, а выход АЦП 3 соединен с входом персонального компьютера 16, первый управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляющим входом модуля 7 осевого сдвига, второй управляющий выход соединен с управляющим входом модуля 9 нормализации сигнала, третий управляющий выход соединен с управляющим входом модуля 11 нормализации сигнала, четвертый управляющий выход соединен с управляющим входом модуля 13 нормализации сигнала, а пятый управляющий выход соединен с управляющим входом модуля 15 нормализации сигнала, и, кроме того, первый выход модуля 17 формирования образцовых сигналов и управления соединен с одним из входов модуля 9 нормализации сигнала, второй выход соединен с одним из входов модуля 11 нормализации сигнала, третий выход соединен с одним из входов модуля 13 нормализации сигнала, и четвертый выход соединен с одним из входов модуля 15 нормализации сигнала, входной разъем 8 присоединяется к расположенным в модуле 9 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и с входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал с первого выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен с входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен с входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом второй управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 9 нормализации сигнала, входной разъем 10 присоединяется к расположенным в модуле 11 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и с входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал со второго выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен с входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен с входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом третий управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 11 нормализации сигнала, входной разъем 12 присоединяется к расположенным в модуле 13 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и с входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал с третьего выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен с входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен с входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом четвертый управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 13 нормализации сигнала, входной разъем 14 присоединяется к расположенным в модуле 15 нормализации сигнала нормально разомкнутому контакту коммутатора 18 и одной из обкладок конденсатора 19, а подвижный контакт коммутатора 18 соединен со второй обкладкой конденсатора 19 и с входом каскада 20 буферного помехоподавляющего, выход которого соединен с одним из входов выпрямителя 21 прецизионного суммирующего и с нормально замкнутым контактом коммутатора 22, при этом на второй вход выпрямителя 21 прецизионного суммирующего подается сигнал с четвертого выхода модуля 17 формирования образцовых сигналов и управления, выход выпрямителя 21 прецизионного суммирующего соединен с нормально разомкнутым контактом коммутатора 22, чей подвижный контакт соединен с входом инвертора 23 и нормально замкнутым контактом коммутатора 24, нормально разомкнутый контакт которого соединен с выходом инвертора 23, а подвижный контакт соединен с входом усилителя 25 фильтрующего, выход усилителя 25 фильтрующего соединен с одним из входов АЦП 3, при этом пятый управляющий выход модуля 17 формирования образцовых сигналов и управления соединен с управляемыми контактами коммутаторов 18, 22 и 24 в модуле 15 нормализации сигнала.
| СПОСОБ ДИАГНОСТИКИ ПОДШИПНИКОВ И ИХ ДЕТАЛЕЙ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138032C1 |
| Способ вибрационного контроля подшипников качения | 1982 |
|
SU1038819A1 |
| СПОСОБ ВИБРАЦИОННОЙ ДИАГНОСТИКИ РОТОРНЫХ СИСТЕМ | 2007 |
|
RU2356021C2 |
| JP 57044819 A, 13.03.1982 | |||
| БЕЗАЛКОГОЛЬНЫЙ НАПИТОК "ТИАКВА "КАСКАД" | 2002 |
|
RU2232529C2 |

