Область техники, к которой относится изобретение
Областью техники, к которой относится изобретение, является логистика и, в частности, автоматизированные системы распределения грузов.
Более конкретно, изобретение относится к способу установления последовательности грузов в такой автоматизированной распределительной системе.
Считается, что автоматизированная распределительная система содержит:
● k источников, где k≥2;
● по меньшей мере одно место получения;
● буферные устройства k источников типа FIFO (First-In First-Out (первым вошел, первым вышел));
● коллектор, собирающий грузы, приходящие от буферных устройств k источников, и транспортирующий их к упомянутому по меньшей мере одному месту получения, причем коллектор содержит k последовательных узлов, каждый из которых выполнен с возможностью комплектации грузов, приходящих от одного из буферных устройств k источников; и
● система управления, выполненная с возможностью обработки заказов клиентов, причем каждый заказ клиента перечисляет грузы, которые должны быть получены из источников и быть доставлены в заданное место получения, в идеале, в заданном восходящем последовательном порядке получения (это может быть восходящий последовательный порядок, являющийся строгим, например, “1 2 3 4 5”, или нестрогим, например, “1 1 2 2 2 3 4 4 5”). Каждый груз связывается с последовательным порядковым номером в месте получения.
Таким образом, считается, что грузы, выходящие из буферных устройств k источников, образуют k входящих потоков грузов и что грузы после комплектации на коллекторе образуют исходящий поток грузов, причем проблема здесь заключается в формировании исходящего потока из k входящих потоков (то есть, группирование вместе k входящих потоков в один исходящий поток).
Система управления обрабатывает заказы клиентов и выводит команды, дающие возможность управлять (командовать) элементами автоматизированной распределительной системы, особенно, источниками, буферными устройствами источников типа FIFO, коллектором и местом или местами получения. Система управления является, например, системой управления центрального склада или системой управления склада (warehouse control system, WCS).
Изобретение может применяться, в частности, но не исключительно, когда каждый источник автоматизированной распределительной системы является частью базового хранилища (эту часть здесь в описании ниже также называют "блоком хранения") и каждым местом получения автоматизированной распределительной системы является участок подготовки заказа клиента или участок комплектации.
Понятно, однако, что, не выходя за рамки настоящего изобретения, может быть предложено множество альтернатив. Например, каждый источник может определяться как хранилище, комплекс, содержащий несколько хранилищ, или, опять же, как устройство хранения (менее сложное, чем базовое хранилище).
Уровень техники
Здесь ниже в этом документе мы будем стремиться более конкретно описать проблемы и вопросы, существующие в конкретном случае, когда система автоматизированного распределения используется для подготовки посылок. Изобретение, конечно, не ограничивается этим частным применением.
Системы подготовки посылок, более конкретно, используются в фирмах для диспетчеризации почтовых заказов и продажи товаров в малых объемах. Основными примерами пользователей таких автоматизированных систем подготовки посылок являются поставщики офисного оборудования, одежды, косметической продукции, инструментов и запасных частей в отрасли машиностроения. Эти системы позволяют с минимальными затратами труда, в короткие сроки и с точным слежением за запасами подготавливать посылки, точно соответствующие заказу клиента, причем этот заказ клиента может быть связан с различными изделиями в различных количествах и каждое из этих изделий с их соответствующим количеством идентифицируется линией заказа клиента (каждая линия заказа клиента определяет складской контейнер, в котором располагается желаемое изделие).
Один из примеров такой автоматизированной системы подготовки посылок описывается, в частности, в патенте FR2915979A1, зарегистрированном настоящим Заявителем. Он содержит, например:
● автоматизированное базовое хранилище, содержащее изделия, находящиеся в складских контейнерах (соответствующих вышеупомянутым грузам), причем каждый складской контейнер ассоциируется с единственной ссылочной позицией изделия (они могут быть также контейнерами, содержащими конкретный заказ клиента и/или совокупность изделий);
● участок подготовки заказа клиента или участок комплектации, на котором изделия подбираются и помещаются оператором в посылку (посылочный контейнер);
● комплект конвейеров, переносящих контейнеры хранения, в которых находятся изделия, из базового хранилища на участок подготовки или диспетчеризации заказа клиента и обратно; и
● систему управления складом (warehouse control system, WCS).
Автоматизированное базовое хранилище содержит, например, четыре блока для хранения, причем каждый блок для хранения формируется проходом, который с любой из сторон занят складским стеллажом (или этажеркой) с несколькими уровнями совмещенных уровней хранения, причем каждый стеллаж подразделяется вдоль своей длины на места для хранения (также называемые ячейками), каждое из которых предназначено для приема контейнера для хранения. На каждом уровне хранения каждый проход принимает транспортеры для перемещения транспортно-загрузочного устройства (также называемого собирающей или транспортирующей тележкой или челноком), которое перемещает контейнеры для хранения таким образом, что они могут помещаться внутрь мест хранения и забираться из этих мест. Транспортер обычно образуется двумя параллельными рельсами, а тележка снабжена колесами для движения по этим рельсам. Тележки могут двигаться не только горизонтально на заданном уровне хранения, но также, когда они перевозят или не перевозят контейнеры для хранения, могут перемещаться с одного уровня дорожки на другой, посредством подъемников (также называемых поднимаемыми/опускаемыми подъемниками или спиральными конвейерами или минипогрузчиками), которые располагаются на одном или на обоих концах прохода (или даже в середине). Эти подъемники дополнительно позволяют транспортировать контейнер для хранения, помещенный на тележку, в направлении комплекта конвейеров.
Система управления управляет заказом клиента, который связывается с каждой посылкой (посылочным контейнером) и составляет список контейнеров для хранения (грузы), соответствующих мест расположения этих контейнеров для хранения в базовом хранилище, доступность тележек и подъемников в базовом хранилище, а также последовательный порядок, в котором эти контейнеры для хранения должны следовать друг за другом к участку подготовки заказа клиента или участку накопителя. Задача здесь состоит в оптимизации всех перемещений и времен подготовки посылок и обеспечении синхронизации между прибытием на станцию подготовки подготавливаемой посылки и контейнеров для хранения, перечисленных в заказе клиента, связанном с этой подготавливаемой посылкой.
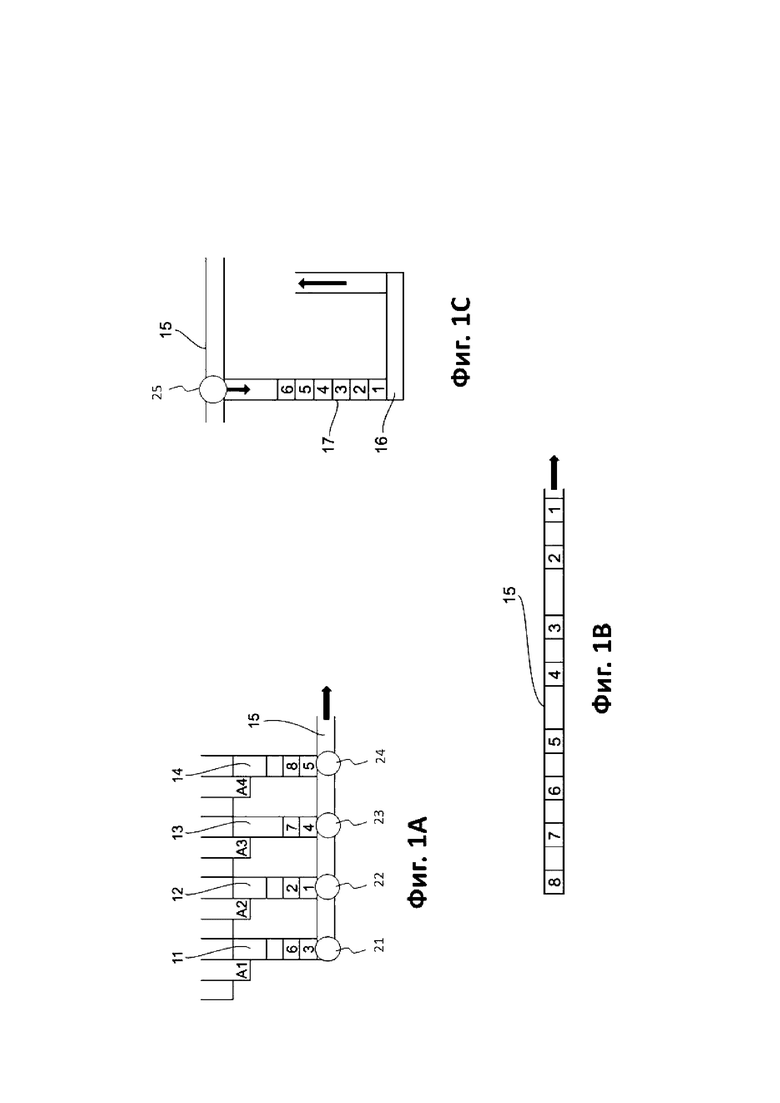
На фиг. 1А, 1В и 1С (которые соответствуют трем последовательным состояниям обработки заказа клиента), представлено с большими подробностями первое известное решение для обработки заказа клиента (и для установления порядка соответствующих грузов) посредством системы управления в конкретном контексте (представленной здесь выше) автоматизированной системы подготовки посылок. Для упрощения на этих чертежах представлены не все составляющие элементы автоматизированной распределительной системы.
На фиг. 1А показаны только концы четырех блоков для хранения, А1-А4, которые являются частью автоматизированного базового хранилища и составляют четыре источника хранения грузов: множество буферных устройств 11-14 типа FIFO (First In First Out (первым вошел, первым вышел)), каждое из которых располагается сразу после одного из четырех блоков А1-А4 для хранения; и коллектор 15 (состоящий, например, из одного или более конвейеров), собирающий через узлы 21-24 грузы, выходящие из буферных устройств 11-14 источников, и переправляющий их вперед к участку 15 подготовки заказа клиента (месту получения). Коллектор 15 также служит для делокализации участка 16 подготовки заказа клиента относительно автоматизированного базового хранилища. Конечно, здания не всегда дают возможность располагать участок подготовки заказа клиента за пределами базового хранилища.
На фиг. 1С представлены только коллектор 15; участок 16 подготовки заказа клиента (содержащий, например, один или более конвейеров), составляющий место получения, которое принимает грузы; и буферное устройство 17 места получения типа FIFO, расположенное перед участком 16 подготовки заказа, чтобы принимать грузы через узел 25.
В этом примере предполагается, что заказ клиента содержит восемь грузов в заданном последовательном порядке в месте получения, соответствующем восходящему порядку ссылочных позиций 1-8, где упомянутые грузы показаны на чертежах. Другими словами, участок 16 подготовки заказа клиента должен принять эти восемь грузов в последовательном порядке 1-8. Также предполагается, что грузы со ссылочными номерами 3 и 6 хранятся в источнике А1, грузы со ссылочными позициями 1 и 2 хранятся в источнике А2, грузы со ссылочными позициями 4 и 7 хранятся в источнике А3 и грузы со ссылочными позициями 5 и 8 хранятся в источнике А4.
Чтобы обработать вышеупомянутый заказ клиента, система управления выполняет первое "внутреннее" установление очередности (установление очередности перед выходом из источников), контролируя каждый из источников А1-А4, так чтобы грузы в заказе клиента, которые хранятся в них, выходили из этих источников в соответствии с заданным последовательным порядком получения. Таким образом, как показано на фиг. 1А, буферное устройство 11 источника (находящееся после источника А1), последовательно принимает грузы со ссылочными позициями 3 и 6. Буферное устройство 12 источника (находящееся после источника А2), последовательно принимает грузы со ссылочными позициями 1 и 2. Буферное устройство 13 источника (находящееся после источника А3), последовательно принимает грузы со ссылочными позициями 4 и 7. Буферное устройство 14 источника (находящееся после блока А4 для хранения), последовательно принимает грузы со ссылочными позициями 5 и 8.
Затем система управления выполняет второе установление очередности "между источниками" (установление очередности после выхода из источников), управляя буферными устройствами 11-14 источников и узлами 21-24, так чтобы при комплектации грузов на коллекторе 15 грузы, перечисленные в заказе клиента, располагались в желаемом последовательном порядке получения. С этой целью, на каждом из узлов 21-24 применяются правила принятия решения (правила ввода и продвижения).
Правила ввода: для грузов, поступающих в узел от одного из источников A1-A4 (через одно из буферных устройств 11-14 источников): груз вводится на коллектор 15 после этого узла, если этот узел является самым дальним от мест получения; для узла, отличного от самого дальнего от места получения, груз вводится, если никакой другой груз, имеющий более низкий последовательный номер в месте получения в заказе, не присутствует перед этим узлом в одном из буферных устройств источников или на коллекторе и если никакой другой груз, имеющий более низкий порядковый номер в месте получения по заказу не присутствует после этого узла в одном из буферных устройств источника, соединенного с другими узлами (если нет, то он не вводится); например, даже если онт готов покинуть буферное устройство 13 источника через узел 23, груз со ссылочным номером 4 не вводится на коллектор, пока грузы со ссылочными номерами 1, 2 и 3 не будут размещены перед узлом 23 в одном из буферных устройств 21 и 22 или на коллекторе 15.
Правило продвижения: для груза, уже присутствующего на коллекторе 15 и движущегося к узлу (поступающего от другого узла, расположенного до него): груз продвигается вперед, если никакой другой груз, имеющий более низкий номер в последовательном порядке получения не присутствует в буферном устройстве источника, соединенном с этим узлом (если нет, то вперед не продвигается); например, если предполагается, что груз со ссылочным номером 3 был помещен (введен) в коллектор 15, то когда он предоставляется узлу 22, он не будет продвигаться вперед до тех пор, пока узлы со ссылочными номерами 1 и 2 располагаются в буферном устройстве 12 источника, соединенного с этим узлом 22.
На фиг. 1В показаны грузы со ссылочными номерами 1-8, транспортируемые основным коллектором 15 после того, как они были собраны (помещены) в желаемом последовательном порядке в месте получения (1-8). Как показано на фиг. 1С, система управления управляет буферным устройством 17 места получения, так что грузы (которые входят в него через узел со ссылочным номером 25 уже отсортированными в желаемом последовательном порядке получения) выходят из него с желаемой скоростью, чтобы попасть на участок 16 подготовки заказа клиента.
Одним из недостатков этой технологии, показанной на фиг. 1А-1С, (и ее правил ввода и продвижения) является то, что скорость заполнения коллектора (и, следовательно, скорость потока, выходящего из коллектора) является неоптимальной.
Чтобы избавиться от вышеупомянутого недостатка, в патентной заявке FR3058708A1, зарегистрированной настоящим Заявителем, описывается второе известное решение. Общий принцип этого известного решения состоит в проведении более точного анализа, чем в первом решении предшествующего уровня, упомянутом здесь выше, чтобы решить, может ли груз, приходящий от источника, быть введен в анализируемый узел. Таким образом, в некоторых случаях второе известное решение ведет к введению груза (в то же время гарантируя, что не существует никакого риска блокирования), тогда как первое известное решение ведет к отсутствию введения груза. Отсюда, второе известное решение повышает скорость заполнения коллектора (и, следовательно, скорость выходящего из коллектора потока). Это также сокращает время ожидания для грузов перед тем, как они поступят в коллектор через узлы.
Первое и второе известные решения, описанные здесь выше, однако, имеют два недостатка:
● они накладывают серьезные ограничения на источники, поскольку установление очередности "внутри источников" (то есть, перед выходом из источников) требует для каждого из источников, чтобы для заданных заказом клиента грузов, которые выходят из них, очередность устанавливалась в соответствии с порядком возрастания последовательных порядковых номеров в месте получения грузов; и
● они накладывают серьезные ограничения на буферные устройства источников и коллектор, поскольку установление очередности "между источниками" (то есть, после выхода из источников) требует, чтобы во время комплектации грузов на коллекторе соблюдалось соответствие между восходящим порядком последовательных порядковых номеров в месте получения грузов (другими словами, в конце комплектации грузов на коллекторе не должно существовать никакого возможного беспорядка).
Чтобы преодолеть эти недостатки, существует третье известное решение, направленное на устранение вышеупомянутых серьезных ограничений для источников, буферных устройств источников и коллектора. Управление, таким образом, заключается в том, чтобы если на коллекторе существует свободное пространство для груза, готового покинуть буферное устройство источника, то тогда этот груз собирается на коллекторе. При этом третьем известном решении грузы могут выходить из источников в беспорядке и могут в беспорядке собираться на коллекторе. Однако, если возрастающий порядок последовательных порядковых номеров в месте получения грузов должен согласовываться с прибытием грузов в месте получения, то тогда необходимо выполнять установление последовательности (также называемое установлением очередности), то есть, изменять порядок в соответствии с желаемым последовательным порядком в месте получения грузов после того, как они собраны на коллекторе. С этой целью, по меньшей мере одна система (или устройство) установления последовательности грузов и буферного хранения помещается между коллектором и местом или местами получения. Примеры таких систем установления последовательности и буферного хранения описаны в патентных заявках FR3051948A1, FR3045583A1 и FR3031510A1, зарегистрированных настоящим Заявителем (их содержание включено сюда посредством ссылки).
Третье известное решение, со своей стороны, однако, также имеет недостатки:
● ожидание свободного места на коллекторе может приводить к нежелательному скоплению грузов в одном или более буферных устройствах источников (особенно, в устройствах, расположенных ближе всего к коллектору);
● поток грузов, выходящих с коллектора, может становиться прерывистым, что означает, что полная механическая вместимость коллектора не используется (грузы находятся на коллекторе на больших расстояниях между ними, чем это требуется, вызывая потерю пространства и снижение скорости производства на конце линии); и
● последовательный порядок комплектации грузов на коллекторе не учитывает возрастающий порядок последовательных порядковых номеров мест получения; любое переупорядивание грузов, если необходимо, полностью опирается на систему установления порядка грузов и буферного хранения, расположенную между коллекторами и местами получения. Это дополнительно повышает сложность и требует большей производительности системы установления порядка грузов и буферного хранения.
Сущность изобретения
В одном из конкретных вариантов осуществления изобретения предлагается способ установления последовательности прохождения грузов, реализуемый системой управления в автоматизированной системе распределения грузов, содержащей:
- k источников, где k≥2;
- по меньшей мере одно место получения;
- буферные устройства k источников типа FIFO (First-In First-Out (первым вошел, первым вышел)), каждое из которых принимает грузы, поступающие от одного из k источников;
- коллектор, собирающий грузы, поступающие от буферных устройств k источников, и транспортирующий их к упомянутому по меньшей мере одному месту получения, причем коллектор содержит k последовательных узлов, каждый из которых выполнен с возможностью комплектации грузов, приходящих от одного из буферных устройств k источников; и
- упомянутая система управления, выполненная с возможностью обработки заказов клиентов, где каждый заказ клиента перечисляет грузы для заданного места получения и связывается с последовательным порядковым номером в месте получения;
причем упомянутая система управления выполняет следующие этапы, на которых:
- составляют лист комплектации, содержащий n грузов, которые должны быть собраны, и понижают беспорядок упомянутых n грузов относительно восходящего порядка последовательных порядковых номеров мест получения, причем упомянутые n грузов содержатся в буферных устройствах источников, где 
- управляют коллектором и буферными устройствами источников, чтобы выполнить комплектацию грузов на коллекторе в соответствии с упомянутым списком комплектации.
Таким образом, предложенное решение предлагает совершенно новый и изобретательный подход, при котором система управления управляет коллектором и буферными устройствами источников для выполнения комплектации при небольшом ограничении, касающемся соблюдения восходящего порядка последовательных порядковых номеров мест получения грузов, покидающих буферные устройства источников. Нарушение этого небольшого ограничения создает беспорядок во время комплектации грузов на коллекторе, а предложенное решение снижает этот беспорядок.
Таким образом, предложенное решение смягчает оба недостатка первого и второго известных решений и недостатки третьего известного решения. В частности, предложенное решение накладывает (устанавливает) на источники, буферные устройства источников и коллектор не вышеупомянутые серьезные (тяжелые) ограничения , а только лишь небольшое ограничение (то есть, ограничение, которое может нарушаться, вызывая в этом случае беспорядок, который желательно уменьшить) на буферные устройства источников и коллектор. Помимо этого, снижение беспорядка во время комплектации облегчает работу в месте получения (если эти места получения не накладывают требования соблюдения восходящего порядка последовательных порядковых номеров в месте получения грузов, достигающих этих мест получения) или также снижает объем работы системы установления последовательности грузов и буферного хранения (если существует система, которая помещается между коллектором и местом или местами получения, чтобы обеспечить соблюдение восходящего порядка последовательных порядковых номеров мест получения грузов, прибывающих в место или места получения).
В соответствии с одной из конкретных характеристик, этап составления списка комплектации содержит следующие этапы, на которых:
(a) инициируют первый набор состояний E1 с одиночным состоянием einit=(Uinit, Linit), где Uinit - k-апплет, содержащий k нулей, и Linit - пустой лист;
(b) инициируют второй набор состояний Е2 с пустым значением;
(c) для каждого этапа составления листа комплектации из числа n последовательных этапов составления:
(c.1) для каждого состояния e из E1, где e = (U, L), U - k-апплет, содержащий k элементов, U=(z1, …, zk), где zi - количество грузов, взятых из i-ого буферного устройства источника,  , и L - лист грузов, связанных с U:
, и L - лист грузов, связанных с U:
(c.1.1) для каждого значения  :
:
(c.1.1.1) если U(f)<p(f), где U(f) - количество грузов f-ого буферного устройства источника, содержащегося в L, и p(f) - количество грузов, которое должно быть собрано в f-ом буферном устройстве источника:
-i- создание нового состояния eN=(UN,LN), начиная с e=(U, L), с добавлением 1 к U(f) и добавлением в конце L груза, занимающего (U(f)+1)-ое положение в последовательности грузов, содержащихся в буферном устройстве f-ого источника;
-ii- вычисление значения беспорядка d списка LN нового состояния eN с помощью функции вычисления беспорядка относительно восходящего порядка последовательного порядка номеров в месте получения;
-iii- если E2 содержит другое носое состояние e’N=(U’N,L’N), где U’N= UN и d’ - значение беспорядка списка L’N: если d<d’, eN заменяет e’N в E2, и если d≥d’, eN не вставляется в E2;
-iv- если E2 не содержит упомянутое другое новое состояние e’N, eN вставляется в E2;
(c.2) если этап создания не является n-ым этапом создания: E2 становится новым набором состояний E1 и способ переходит к следующему этапу создания;
(c.3) если этап создания является n-ым этапом создания: E2 содержит единственное конечное состояние eF=(UF,LF) и LF формирует упомянутый лист комплектации.
Таким образом, система управления может выстраивать лист комплектации просто и автоматически с высококачественными характеристиками (с точки зрения времени вычисления, сложности и т.п.).
В соответствии с одной конкретной характеристикой, на этапе c.1.1.1 система управления также проверяет, является ли N(f)<yf, где N(f) - самая длинная последовательность грузов f-ого буферного устройства источника, помещенных последовательно в L, и yf - заданный порог. Кроме того, этапы (i)-(iv) выполняются, только если U(f)<p(f) и N(f)<yf.
Таким способом ограничивается количество грузов, собираемых последовательно в одном и том же буферном устройстве источника. Это выравнивает исходное состояние (с точки зрения источников и буферных устройств источников) грузов в листе комплектации.
В соответствии с одной из конкретных характеристик, этап -ii- сопровождается следующим этапом, на котором:
-iia- если d>dH, где dH - заданное значение, новое состояние e1 не вставляется в E2 и этапы (iii) и (iv) не выполняются.
Это упрощает вычисления, производимые системой управления (меньше состояний для управления ими).
В соответствии с конкретной характеристикой, заданное значение dH вычисляется следующим образом:
- составляют ссылочный лист LH, содержащий упомянутые n грузов, построенный следующим образом:
* первый груз из LH является грузом, имеющим наименьший последовательный порядковый номер в месте получения из числа грузов, действительно готовых покинуть буферных устройств k источников;
* каждый последующий груз из LH является грузом, имеющим наименьший последовательный порядковый номер в месте получения из числа грузов, готовых покинуть буферные устройства k источников, произвольно предполагая, что предшествующие грузы из LH покинули буферных устройств k источников;
- вычисляют dH как значение беспорядка списка LH с помощью упомянутой функции вычисления беспорядка.
Таким образом, чтобы вычислить заданное значение беспорядка dH, мы используем эвристический способ (способ вычисления, который быстро дает решение, не обязательно являющееся оптимальным решением). Предложенный эвристический способ является простым для реализации.
В одной частной реализации упомянутая функция вычисления беспорядка для списка М из q грузов записывается следующим образом:
 , где K(i) - количество грузов в списке M, помещенных перед i-ым грузом списка М и имеющих последовательный порядковый номер в месте получения, меньший или равный последовательному порядковому номеру i-ого груза из списка M.
, где K(i) - количество грузов в списке M, помещенных перед i-ым грузом списка М и имеющих последовательный порядковый номер в месте получения, меньший или равный последовательному порядковому номеру i-ого груза из списка M.
Функция H(M) вычисления беспорядка предлагает высококачественное решение для вычисления беспорядка по сравнению со строгим восходящим порядком (например, “1 2 3 4 5”) или нестрогим восходящим порядком (например, “1 1 2 2 2 3 4 4 5”) последовательных порядковых номеров в месте получения.
В вариантах реализации могут использоваться и другие функции вычисления беспорядка (смотрите ниже).
В соответствии с одной из конкретных характеристик, грузы из заданного заказа клиента должны достигать заданного места получения в заданном возрастающем последовательном порядке мест получения и упомянутая система управления выполняет этап управления по меньшей мере одним устройством установления последовательности, помещенным между коллектором и упомянутым по меньшей мере одним местом получения, чтобы корректировать беспорядок n грузов.
Таким образом, в этом случае предложенное решение обеспечивает соответствие возрастающему порядку последовательных порядковых номеров мест получения грузов, достигающих места или мест получения. Кроме того, как дополнительно упомянуто выше, предложенное решение в этом случае сокращает объем работы системы установления последовательности грузов и буферного хранения (по сравнению с третьим решением предшествующего уровня техники). Конечно, работы по установлению очередности выполняются частично конкретным механизмом комплектации, то есть, коллектором, грузов, поступающих из буферных устройств источников, и частично - системой установления последовательности грузов и буферного хранения.
В соответствии с одной из конкретных характеристик, система управления выполняет следующий этап перед этапом создания списка грузов по меньшей мере для одной группы из R последовательных грузов, содержащихся в одном из буферных устройств источников, где R - целое число, большее или равное 2, на котором: вычисляют замещающий последовательный порядковый номер в месте получения как функцию последовательных порядковых номеров мест получения R грузов. Кроме того, для выполнения этапа создания списка комплектации система управления использует замещающий последовательный порядковый номер в месте получения для каждого из R грузов.
Таким образом, грузы из одной и той же группы из R грузов будут следовать друг за другом в списке комплектации. Это дает возможность, например, соблюдать высококачественные механические ограничения, чтобы установить соответственно шаг для поступления этих R грузов в соответствующее буферное устройство источника (а также выхода этих R грузов из соответствующего источника).
В соответствии с одной из конкретных характеристик, вычисление замещающего последовательного порядкового номера в месте получения как функции последовательных порядковых номеров в месте получения R грузов содержит:
- вычисление среднего значения последовательных порядковых номеров мест получения R грузов;
- вычисление значения беспорядка R грузов как функции последовательных порядковых номеров мест получения R грузов;
- если значение беспорядка R грузов превышает заданный порог, замещающий последовательный порядковый номер в месте получения является средним значением, округленным вверх до следующего целого числа; если заданный порог не превышается, то замещающий последовательный порядковый номер в месте получения является средним значением, округленным вниз до следующего целого числа.
Это упрощает вычисления, производимые системой управления для замещающего последовательного порядкового номера в месте получения.
В соответствии с одной из конкретных характеристик, новое выполнение этапов способа запускается, если введение по меньшей мере одного нового груза в одно из буферных устройств источников подталкивает к модификации грузов, которые должны собираться в упомянутом буферном устройстве источника, и, следовательно, n грузов, которые должны собираться во всех буферных устройствах k источников.
Таким образом, предложенное решение может использоваться динамично при новом выполнении способа, как только возникает изменение n грузов, которые должны комплектоваться.
Другой вариант осуществления предлагает компьютерный программный продукт, содержащий команды управляющей программы для реализации вышеупомянутого способа (в любом из его различных вариантов осуществления), когда упомянутая программа выполняется на компьютере.
Другой вариант осуществления изобретения предлагает использование считываемого компьютером и постоянного носителя данных, хранящего компьютерную программу, содержащую набор команд, исполняемых компьютером для реализации вышеупомянутого способа (в любом из его различных вариантов осуществления).
Другой вариант осуществления изобретения предлагает автоматизированную систему распределения грузов, содержащую:
- k источников, где k≥2;
- по меньшей мере одно место получения;
- буферные устройства k источников типа FIFO (First-In First-Out (первым вошел, первым вышел)), каждое из которых принимает грузы, поступающие от одного из k источников;
- коллектор, собирающий грузы, поступающие от буферных устройств k источников, и транспортирующий их к упомянутому по меньшей мере одному месту получения, причем коллектор содержит k последовательных узлов, каждый из которых выполнен с возможностью комплектации грузов, приходящих от одного из буферных устройств k источников; и
- система управления, выполненная с возможностью обработки заказов клиентов, где каждый заказ клиента перечисляет грузы для заданного места получения и связывается с последовательным порядковым номером в месте получения;
упомянутая система управления содержит вычислительную машину, вычисленную с возможностью:
- составления листа комплектации, содержащего n грузов, которые должны быть собраны, и снижения беспорядка упомянутых n грузов относительно восходящего порядка последовательных порядковых номеров в месте получения, причем упомянутые n грузов содержатся в буферных устройствах источников, где  , p(i) - количество грузов, которые должны быть собраны в буферном устройстве i-ого источника; и
, p(i) - количество грузов, которые должны быть собраны в буферном устройстве i-ого источника; и
- управления коллектором и буферными устройствами источников для комплектации грузов на коллекторе в соответствии с упомянутым листом комплектации.
Предпочтительно, система управления содержит средство реализации этапов, выполняемых способом установления последовательности грузов, как описано здесь выше, в любом из его различных вариантов осуществления.
Краткое описание чертежей
Другие признаки и преимущества изобретения станут понятны из последующего описания, представленного посредством показательного и неисчерпывающего примера и приложенных чертежей, на которых:
фиг. 1А, 1В и 1С, уже описанные со ссылкой на предшествующий уровень техники, - три состояния (грузы перед комплектацией на коллекторе, грузы после комплектации на коллекторе и грузы, поступающие на участок получения или подготовки после поступления от коллектора) обработки заказа клиента с помощью первого известного решения;
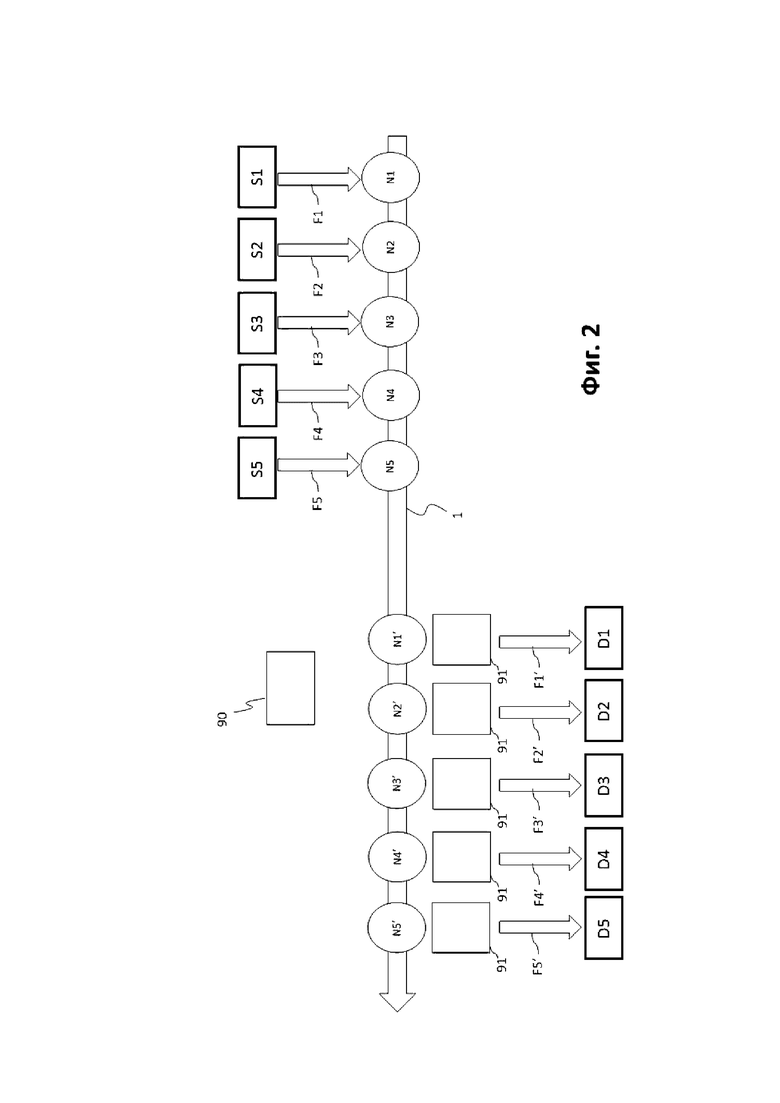
фиг. 2 - блок-схема примера автоматизированной распределительной системы, в которой можно реализовать способ установления последовательности, соответствующий изобретению;
фиг. 3 - блок-схема последовательности выполнения операций способа установления последовательности, соответствующая одному конкретному варианту осуществления изобретения;
фиг. 4 - структура системы управления, соответствующая одному конкретному варианту осуществления изобретения;
фиг. 5 - алгоритм конкретной реализации этапа 31, показанного на фиг. 3 (составление списка комплектации или получения);
фиг. 6 - пример дерева состояний, рассматриваемого алгоритмом, приведенным на фиг. 5;
фиг. 7А, 7В и 7С - три состояния (грузы перед комплектацией на коллекторе, грузы после комплектации на коллекторе и грузы после окончательного установления очередности) обработки заказа клиента с помощью способа установления последовательности грузов, соответствующего изобретению, в первой реализации с единственным местом получения;
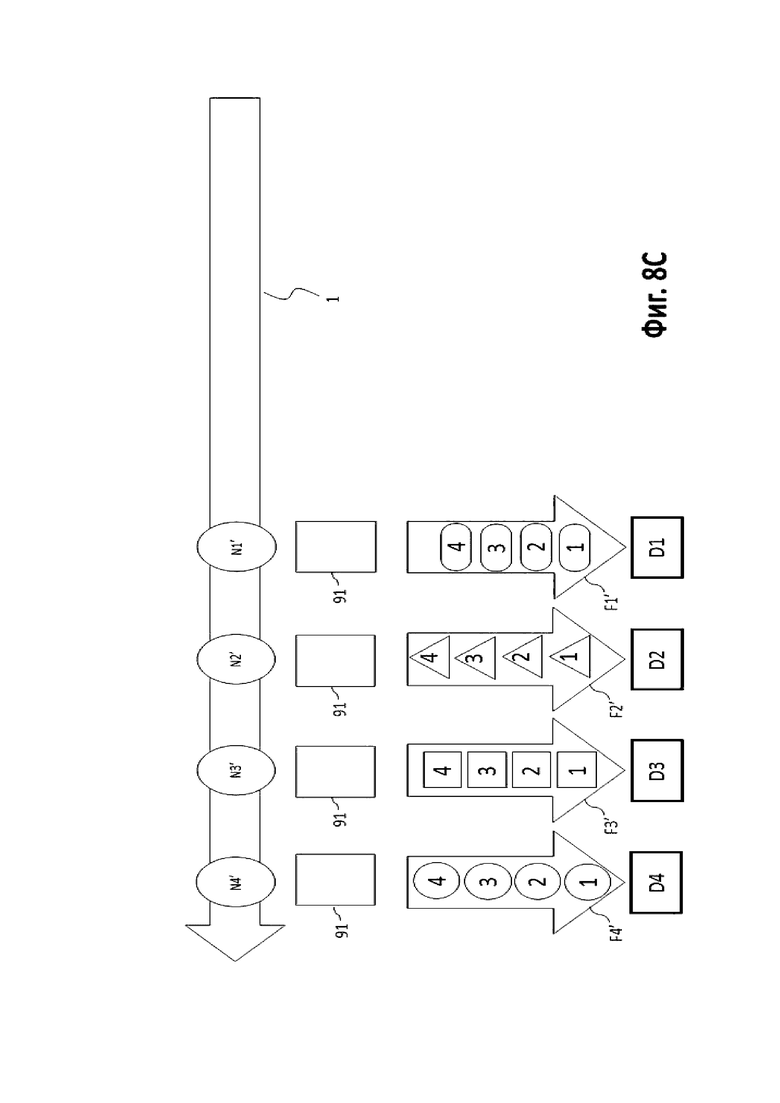
фиг. 8А, 8В и 8С - три состояния (грузы перед комплектацией на коллекторе, грузы после комплектации на коллекторе и грузы после окончательного установления очередности) обработки заказа клиента с помощью способа установления последовательности грузов, соответствующего изобретению, во второй реализации с несколькими местами получения;
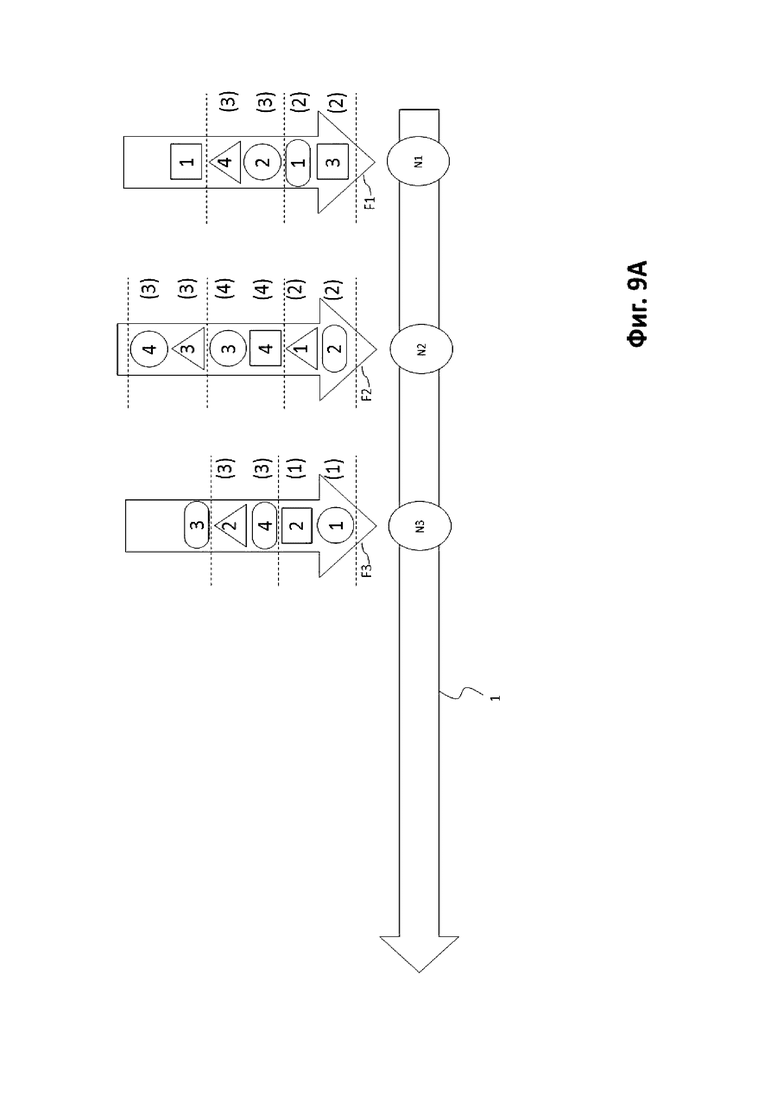
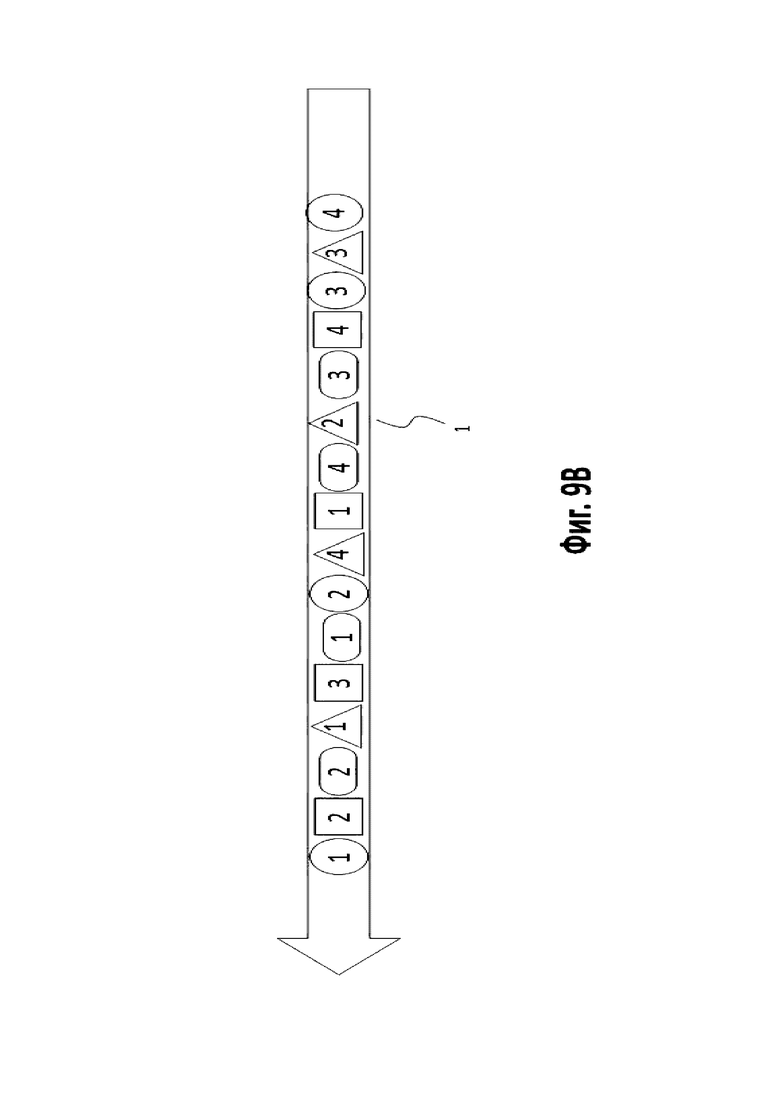
фиг. 9А и 9В - два состояния (грузы перед комплектацией на коллекторе и грузы после комплектации на коллекторе) обработки заказа клиента с помощью способа установления последовательности грузов, соответствующего изобретению, в третьей реализации с использованием замещающих последовательных порядковых номеров мест получения.
Подробное описание
На всех чертежах настоящего изобретения одинаковые элементы и этапы обозначаются одинаковыми ссылочными позициями.
На фиг. 2 представлена блок-схема примера автоматизированной распределительной системы, в которой можно реализовать способ установления последовательности, соответствующий изобретению. В этом примере система содержит пять источников S1-S5 (например, различные части (блоки для хранения) в базовом хранилище), пять мест получения D1-D5 (например, участки подготовки и выдачи заказа клиента), коллектор 1 (состоящий, например, из одного или более конвейеров), системы или устройства 91 установления последовательности и хранения и система 90 управления (например, типа WCS). В этом примере количество источников и количество мест получения дается исключительно для иллюстрации. В более общем плане, система содержит k источников, где k≥2, и по меньшей мере одно место получения.
Как уже дополнительно объяснялось выше, коллектор 1 выполнен с возможностью транспортирования грузов до каждого места получения и содержит множество последовательных узлов: те, которые упоминаются как N1-N5, каждый выполнен с возможностью комплектации грузов, поступающих от одного из источников S1-S5, а те, которые упоминаются как N1’-N5’, каждый выполнен с возможностью прямой передачи грузов в направлении одного из мест получения D1-D5. Каждый из этих узлов содержит, например, 90-градусное или 45-градусное передаточное устройство.
Перед каждым местом получения система 91 установления последовательности и буферного хранения позволяет выполнять окончательное установление очередности грузов в восходящем последовательном порядке мест получения для этого места получения. Как дополнительно подробно описано ниже, принимается, что в конце комплектации грузов на коллекторе эти грузы находятся в беспорядке (относительно восходящего последовательного порядка мест получения). Система 91 установления последовательности и буферного хранения устраняет этот беспорядок.
В одном из вариантов ограничение является более гибким по отношению к местам получения и принимается, что восходящий порядок последовательных порядковых номеров в месте получения не согласуется с грузами, прибывающими в это место получения. В этом варианте система 91 установления последовательности и буферного хранения перед каждым местом получения либо пропускается (не присутствует), либо используется для выполнения окончательного установления очередности, что может быть только частичным (то есть, иногда только уменьшает вышеупомянутый беспорядок без его полного исключения).
В другом варианте существует не нескольких систем установления последовательности и буферного хранения (только одна перед каждым местом получения и после коллектора 1), а только одна система 91 установления последовательности и буферного хранения (перед набором мест получения).
Система 90 управления выполнена с возможностью обработки заказов клиентов, каждый из которых перечисляет грузы, которые должны быть получены из источников, и, в идеале, (смотрите приведенное выше обсуждение) должны предоставляться в заданном восходящем последовательном порядке в месте получения в заданное место получения.
Например, она реализует способ установления последовательности грузов, соответствующий конкретному варианту осуществления, описанному ниже со ссылкой на фиг. 5 и 6.
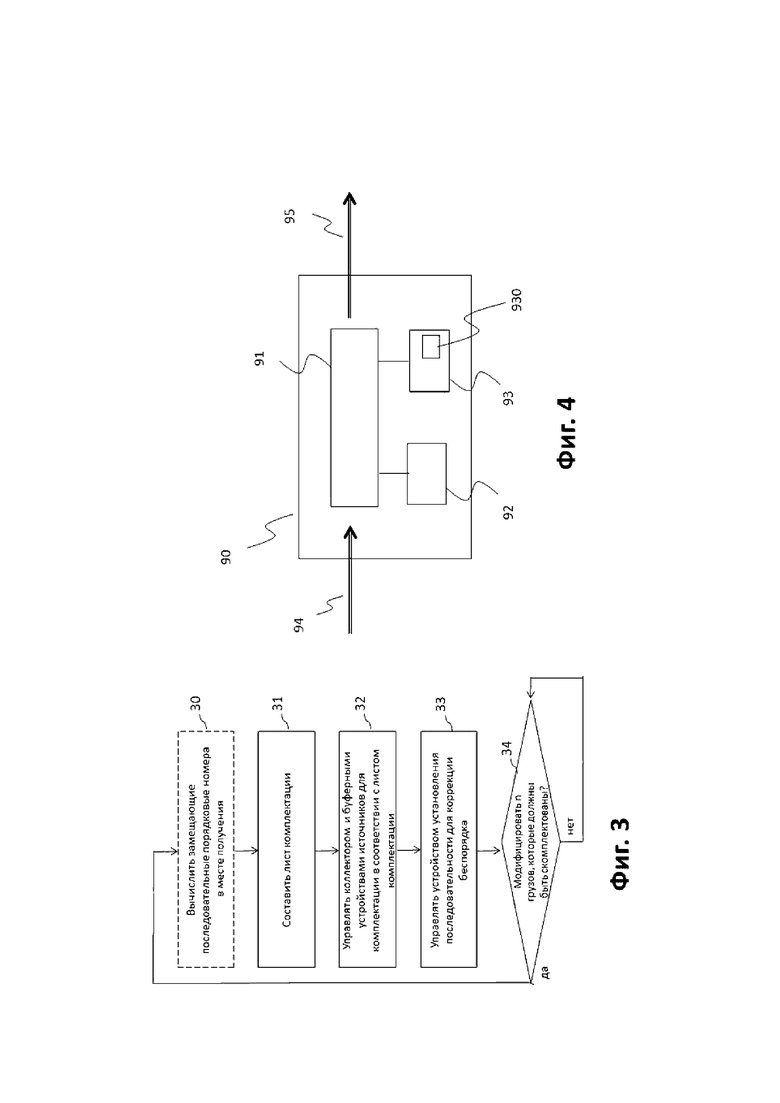
На фиг. 3 представлен способ установления последовательности, соответствующий конкретному варианту осуществления изобретения. Этот способ реализуется системой 90 управления.
На этапе 31 система 90 управления подготавливает лист комплектации, содержащий n грузов, которые должны быть собраны, и снижает беспорядок n грузов относительно восходящего порядка последовательных порядковых номеров мест получения. n грузов содержатся в буферных устройствах F1-F5 источников. Мы имеем: , где p(i) - количество грузов, которые должны быть собраны в i-ом буферном устройстве источника. Одна из конкретных реализаций этого этапа 31 для составления списка комплектации описывается здесь ниже со ссылкой на фиг. 5.
На этапе 32 система 90 управления управляет коллектором 1 и буферными устройствами F1-F5 источников, так чтобы комплектация грузов (на коллекторе) выполнялась в соответствии с упомянутым листом комплектации.
Если грузы по заданному заказу клиента должны прибывать в заданное место получения в заданном последовательном порядке мест получения, то выполняют этап 33, на котором система 90 управления управляет системой 91 установления последовательности и буферного хранения для коррекции беспорядка грузов.
На этапе 34 тестирования система 90 управления проверяет, что введение по меньшей мере одного нового груза в одно из буферных устройств F1-F5 источников подталкивает к модификации грузов, которые должны собираться в этом буферном устройстве источника, и, следовательно, n грузов, которые должны собираться в наборе буферных устройств k источников. В случае положительного результата на этапе 34 тестирования (то есть, в случае модификации набора из n грузов, которые должны быть собраны) система 90 управления запускает новое выполнение этапов способа.
В одном из вариантов способ установления последовательности грузов содержит предварительный этап 30, который дополнительно описывается ниже со ссылкой на фиг. 9А и 9В.
На фиг. 4 представлена структура системы управления, соответствующей одному конкретному варианту осуществления изобретения. Эта система управления содержит оперативную память 92 (например, RAM), процессорный блок 91, снабженный, например, процессором и приводимый в действие компьютерной программой 930, хранящейся в постоянной памяти 93 (например, ROM или жесткий диск).
При иницировании управляющие команды компьютерной программы, например, загружаются в оперативную память 92 и затем исполняются процессором процессорного блока 91, чтобы реализовать способ установления последовательности, соответствующий изобретению (например, в соответствии с вариантом осуществления, показанным на фиг. 3 и 5). Процессорный блок 91 вводит команды 94 (также упоминаемые как "инструкции").
Процессор процессорного блока 91 обрабатывает эти команды 94 и формирует на выходе другие команды 95 (также упоминаемые как "инструкции"), позволяющие управлять (или командовать) различными элементами, содержащимися в автоматизированной распределительной системе, в частности, источниками S1-S5, буферными устройствами F1-F5 источников типа FIFO, коллектором 1, местами D1-D5 получения, буферными устройствами F1’-F5’ типа FIFO для мест получения и системами 91 установления последовательности и буферного хранения.
На этом фиг. 4 показан только один конкретный способ из множества возможных для выполнения способа изобретения в каких-либо вариантах осуществления. Конечно, система управления может выполняться одинаково хорошо на перепрограммируемой компьютерной машине (например, на персональном компьютере, DSP-процессоре, микроконтроллере и т.п.), исполняющей программу, содержащую последовательность команд, или на специализированной вычислительной машине (например, на наборе логических микросхем, таких как FPGA или ASIC или на любом другом аппаратном модуле).
Если управляющая система выполняется с помощью перепрограмируемой вычислительной машины, то соответствующая программа (например, последовательность команд) может храниться на носителе запоминающего устройства, который может быть съемным (таким как, например, дискета, компакт-диск CD-ROM или диск DVD-ROM) или несъемным, причем такой носитель запоминающего устройства может быть частично или полностью считываемым компьютером или процессором.
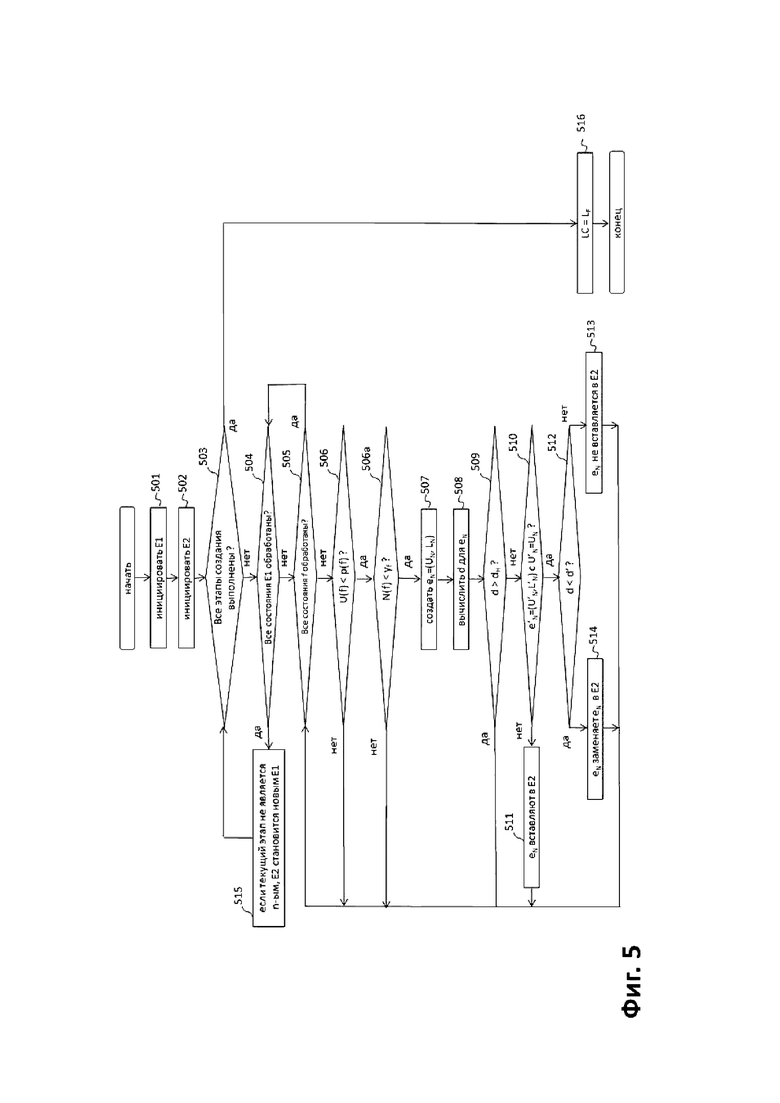
На фиг. 5 представлен алгоритм конкретной реализации этапа 31, показанного на фиг. 3 (подготовка списка комплектации, LC).
На этапе 501 система управления инициирует первый набор состояний E1 с одиночным состоянием einit=(Uinit, Linit), где Uinit - k-апплет, содержащий k нулей, и Linit - пустой лист.
На этапе 502 система управления инициирует второй набор состояний Е2 с нулевым значением.
На этапе 503 тестирования система управления проверяет, выполнены ли n последовательных этапов создания списка (или все этапы).
В случае положительного результата на этапе 503 тестирования система управления переходит к этапу 516, на котором получают лист LC комплектации из единственного конечного состояния eF=(UF,LF), содержащегося в Е2. Конечно, она принимает LF в качестве списка LC комплектации.
В случае отрицательного результата на этапе 503 тестирования система управления начинает обработку следующего этапа составления списка, переходя к этапу 504 тестирования, на котором проверяют, все ли состояния Е1 были обработаны. Каждое состояние e из E1 записывается как e = (U, L), где U - k-апплет, содержащий k элементов, U=(z1, …, zk), где zi - количество грузов, взятых в буферном устройстве i-ого источника, , и L - лист грузов, связанных с U.
В случае положительного результата на этапе 504 тестирования, система управления переходит к этапу 515, на котором, если этап создания списка не является n-ым этапом составления списка, E2 становится новым набором состояний E1 и затем система управления возвращается к этапу 503 (для перехода к следующему этапу составления).
В случае отрицательного результата на этапе 504 тестирования система управления забирает необработанное состояние Е1 и переходит к этапу 505 тестирования, на котором проверяет, все ли значения f были обработаны с помощью 
В случае положительного результата на этапе 505, система управления возвращается к этапу 504.
В случае отрицательного результата на этапе 505 тестирования, система управления забирает необработанное значение f и переходит к этапу 506 тестирования, на котором проверяет, соблюдается ли U(f)<p(f), где U(f) - количество грузов в f-ом буферном устройстве источника, содержащемся в L, и p(f) - количество грузов, которое должно быть собрано в f-ом буферном устройстве источника.
В случае отрицательного результата на этапе 506 тестирования, система управления возвращается к этапу 505. В случае положительного результата на этапе 506, система управления переходит к этапу 506 тестирования, на котором проверяет, соблюдается ли N(f)<yf, где N(f) - максимальное количество грузов f-ого буферного устройства источника, помещенных последовательно в L, и yf - заданное значение (например, yf=6).
В случае отрицательного результата на этапе 506а тестирования, система управления возвращается к этапу 505.
В случае положительного результата на этапе 506a тестирования, система управления переходит к этапу 507, на котором она создает новое состояние eN=(UN,LN), начиная с e=(U, L), с добавлением 1 к U(f) и добавлением в конце L груза, занимающего (U(f)+1)-ое положение в последовательности грузов, содержащихся в f-ом буферном устройстве источника.
Этап 507 сопровождается этапом 508, на котором система управления вычисляет значение беспорядка d списка LN нового состояния eN с помощью функции вычисления беспорядка относительно восходящего порядка последовательных порядковых номеров мест получения.
В одном конкретном варианте осуществления этапа 508 система управления использует функцию вычисления беспорядка, которая для списка М из q грузов записывается следующим образом:
[Уравнение 1]

где K(i) - количество грузов в списке M, помещенных перед i-ым грузом списка М и имеющих последовательный порядковый номер в месте получения, меньший или равный последовательному порядковому номеру i-ого груза из списка M.
Другие функции вычисления беспорядка могут использоваться, не отступая от сущности настоящего изобретения, в частности, но не исключительно:
[Уравнение 2]
B(M) + MAX (K(i), i ∈{1, ... , q}
где K(i) определяется, как указано выше.
[Уравнение 3]
где A(i) - положение, которое должен занимать i-ый груз из списка M, если q грузов из списка М были переупорядочены в соответствии с восходящим порядком последовательных порядковых номеров мест получения.
[Уравнение 4]
G(M) = MAX (|(A(i) – i|), i ∈{1, ... , q}
где А(i) определяется, как указано выше.
Например, для M=(3,1,8,4,7,2,6,5) получаем:
● H(M) = ([(1-1)-0] + [(2-1)-0] + [(3-1)-2] + [(4-1)-2] + [(5-1)-3] + [(6-1)-1] + [(7-1)-4] + [(8-1)-4]) = 12
● B(M) = 4
● F(M) = (|3-1| + |1-2| + |8-3| + |4-4| + |7-5| + |2-6| + |6-7| + |5-8|) = 18
● G(M) = 5
Этап 508 сопровождается этапом 509 тестирования, на котором система управления проверяет, соблюдается ли d>dH, где dH - заданное значение.
В одном из конкретных вариантов осуществления этапа 509 заданное значение dH вычисляется следующим образом:
- составляют ссылочный лист LH, содержащий n грузов, построенный следующим образом:
○ *первый груз из LH является грузом, имеющим наименьший последовательный порядковый номер в месте получения из числа грузов, действительно готовых покинуть буферные устройства k источников;
○ *каждый последующий груз из LH является грузом, имеющим наименьший последовательный порядковый номер в месте получения из числа грузов, которые могут быть готовы покинуть буферные устройства k источников, произвольно предполагая, что предшествующие грузы из LH покинули буферные устройства k источников;
- вычисляют dH как значение беспорядка списка LH с помощью упомянутой функции вычисления беспорядка.
В случае положительного результата на этапе 509 тестирования, система возвращается к этапу 505. В случае отрицательного результата на этапе 509 тестирования, система управления переходит к этапу 510 тестирования, на котором проверяет, содержит ли Е2 другое новое состояние e’N=(U’N,L’N), где U’N= UN и d’ - значение беспорядка списка L’N.
В случае положительного результата на этапе 510 тестирования, система управления переходит к этапу 512, на котором она проверяет условие d<d’. В случае положительного результата на этапе 512 тестирования, система управления переходит к этапу 514, на котором она заменяет e’N на eN в E2. В случае отрицательного результата на этапе 512 тестирования, система управления переходит к этапу 513, на котором она не вставляет eN в E2. В конце этапа 512 или этапа 514, система управления возвращается к этапу 505.
В случае отрицательного результата на этапе 510 тестирования, система управления переходит к этапу 511, на котором она вставляет eN в E2 и затем возвращается к этапу 505.
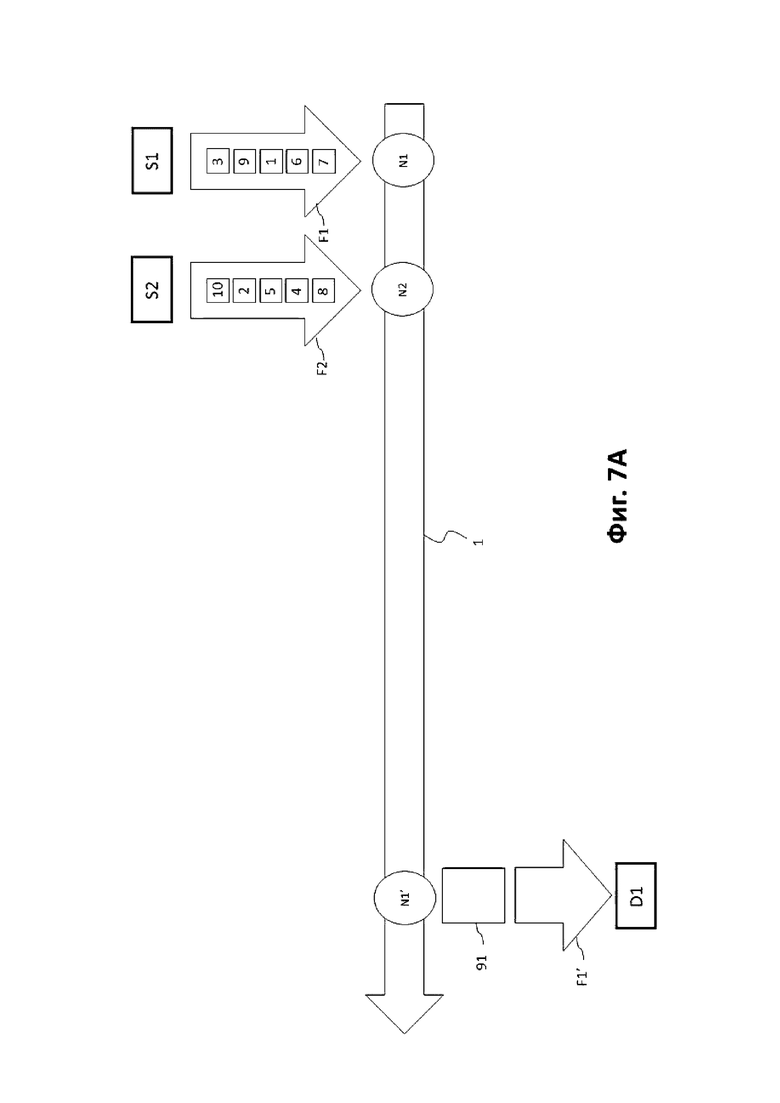
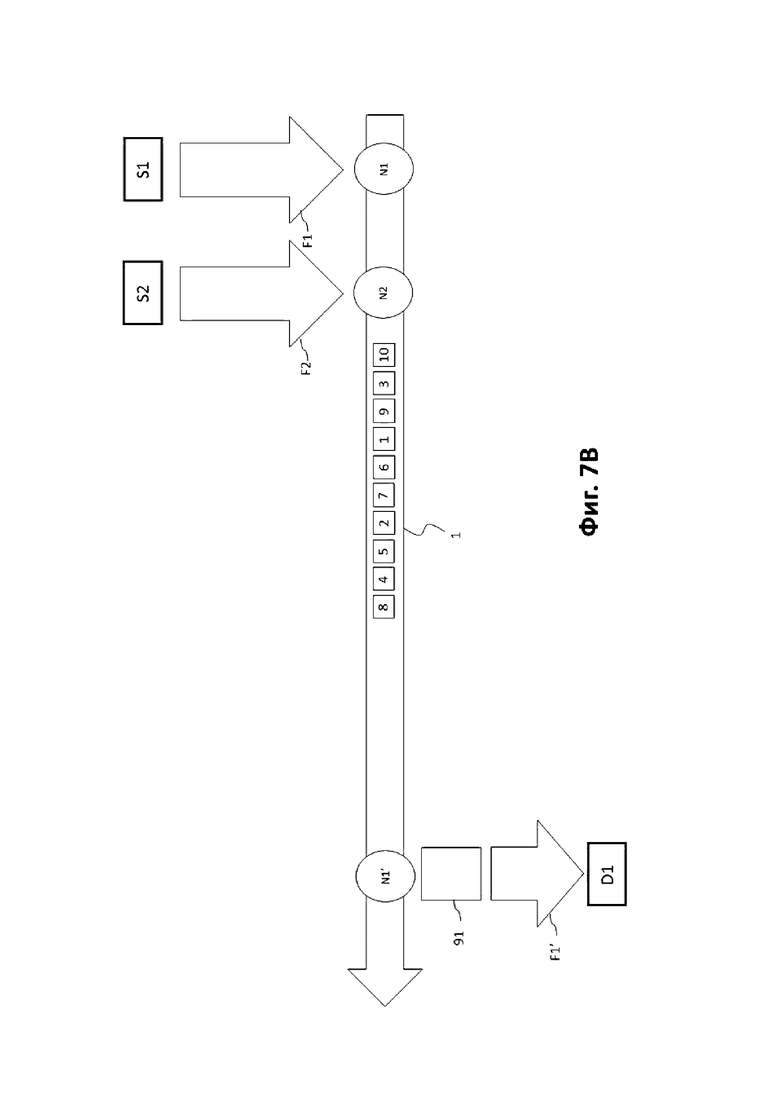
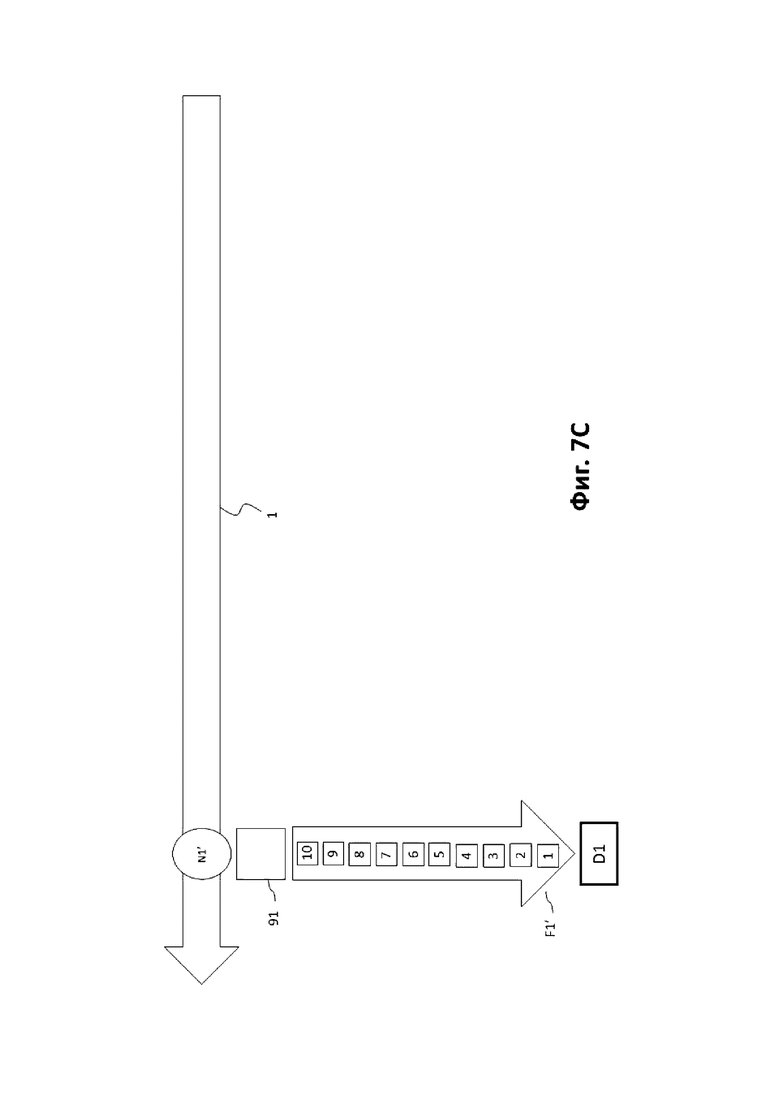
Опять, на фиг. 6, 7А, 7В и 7С показана обработка заказа клиента с помощью способа установления последовательности грузов, соответствующего изобретению, в первой реализации только с одним местом получения. На фиг. 7А, 7В и 7С соответственно показаны следующие три этапа этой обработки: грузы перед комплектацией на коллекторе, грузы после комплектации на коллекторе и грузы после окончательного определения очередности.
В этом примере предполагается, что существуют два источника S1 и S2 и одно место получения D1. Заказ клиента, который должен быть обработан, перечисляет следующие грузы: 1, 2, 3, 4, 5, 6, 7, 8, 9 и 10 (на чертежах грузы обозначаются их последовательным порядковым номером в месте получения).
Как показано на фиг. 7А, буферное устройство F1 источника (находящееся после источника S1) содержит пять грузов в соответствии со следующей последовательностью: 7, 6, 1, 9 и 3. Буферное устройство F2 источника (находящееся после источника S2) содержит пять грузов в соответствии со следующей последовательностью: 8, 4, 5, 2 и 10. Поэтому, имеем n=10, p(1)=5 и p(2)=5.
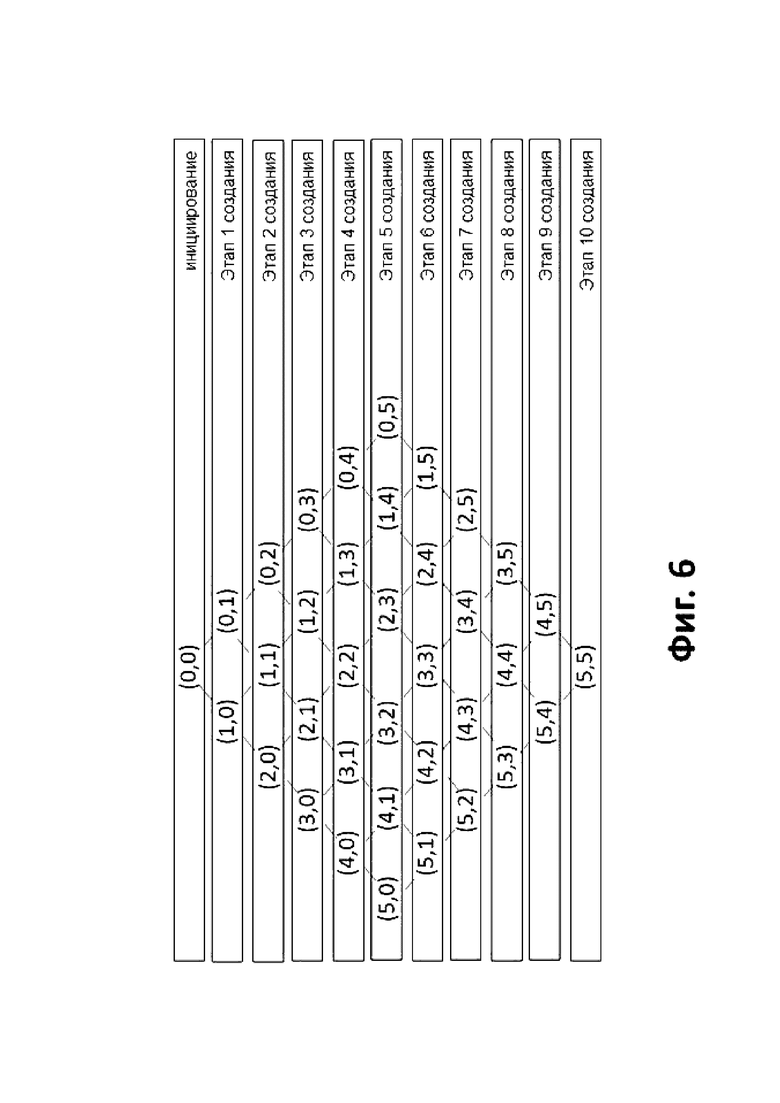
Результаты этапа инициирования E1 и n этапов составления, описанных дополнительно выше со ссылкой на фиг. 5, являются следующими (принимая H(M) в качестве функции вычисления значения беспорядка d):
Этап инициирования Е1
состояние e00 = [U=(0,0) ; L=()] ; d=0
Этап 1 создания
состояние e10 = [U=(1,0) ; L=(8)] ; d=0
состояние e01 = [U=(0,1) ; L=(7)] ; d=0
Этап 2 создания
состояние e20 = [U=(2,0) ; L=(8,4)] ; d=1
состояние e11 = [U=(1,1) ; L=(7,8)] ; d=0
состояние e’11 = [U=(1,1) ; L=(8,7)] ; d=1 (не поддерживается)
состояние e02 = [U=(0,2) ; L=(7,6)] ; d=1
Этап 3 создания
состояние e30 = [U=(3,0) ; L=(8,4,5)] ; d=2
состояние e21 = [U=(2,1) ; L=(8,4,7)] ; d=2
состояние e’21 = [U=(2,1) ; L=(7, 8, 4)]; d=2 (не поддерживается)
состояние e12 = [U=(1,2) ; L=(7,8,6)] ; d=2 (не поддерживается)
состояние e’12 = [U=(1,2) ; L=(7,6,8)] ; d=1
состояние e03 = [U=(0,3) ; L=(7,6,1)] ; d=3
Этап 4 создания
состояние e40 = [U=(4,0) ; L=(8,4,5,2)] ; d=5
состояние e31 = [U=(3,1) ; L=(8,4,5,7)] ; d=3
состояние e’31 = [U=(3,1) ; L=(8,4,7,5)] ; d=4 (не поддерживается)
состояние e22 = [U=(2,2) ; L=(8,4,7,6)] ; d=4
состояние e’22 = [U=(2,2) ; L=(7,6,8,4)] ; d=4 (не поддерживается)
состояние e13 = [U=(1,3) ; L=(7,6,8,1)] ; d=4 (не поддерживается)
состояние e’13 = [U=(1,3) ; L=(7,6,1,8)] ; d=3
состояние e04 = [U=(0,4) ; L=(7,6,1,9)] ; d=3
Этап 5 создания
состояние e50 = [U=(5,0) ; L=(8,4,5,2,10)] ; d=5
состояние e41 = [U=(4,1) ; L=(8,4,5,2,7)] ; d=6
состояние e’41 = [U=(4,1) ; L=(8,4,5,7,2)] ; d=7 (не поддерживается)
состояние e32 = [U=(3,2) ; L=(8,4,5,7,6)] ; d=5
состояние e’32 = [U=(3,2) ; L=(8,4,7,6,5)] ; d=7 (не поддерживается)
состояние e23 = [U=(2,3) ; L=(8,4,7,6,1)] ; d=8 (не поддерживается)
состояние e’23 = [U=(2,3) ; L=(7,6,1,8,4)] ; d=6
состояние e14 = [U=(1,4) ; L=(7,6,1,8,9)] ; d=3
состояние e’14 = [U=(1,4) ; L=(7,6,1,9,8)] ; d=4 (не поддерживается)
состояние e05 = [U=(0,5) ; L=(7,6,1,9,3)] ; d=6
Этап 6 создания
состояние e51 = [U=(5,1) ; L=(8,4,5,2,10,7)] ; d=7 (не поддерживается)
состояние e’51 = [U=(5,1) ; L=(8,4,5,2,7,10)] ; d=6
состояние e42 = [U=(4,2) ; L=(8,4,5,2,7,6)] ; d=8
состояние e’42 = [U=(4,2) ; L=(8,4,5,7,6,2)] ; d=10 (не поддерживается)
состояние e33 = [U=(3,3) ; L=(8,4,5,7,6,1)] ; d=10 (не поддерживается)
состояние e’33 = [U=(3,3) ; L=(7,6,1,8,4,5)] ; d=9
состояние e24 = [U=(2,4) ; L=(7,6,1,8,4,9)] ; d=6
состояние e’24 = [U=(2,4) ; L=(7,6,1,8,9,4)] ; d=7 (не поддерживается)
состояние e15 = [U=(1,5) ; L=(7,6,1,8,9,3] ; d=7
состояние e’15 = [U=(0,5) ; L=(7,6,1,9,3,8)] ; d=7 (не поддерживается)
Этап 7 создания
состояние e52 = [U=(5,2) ; L=(8,4,5,2,7,10,6)] ; d=9 (не поддерживается)
состояние e’52 = [U=(5,2) ; L=(8,4,5,2,7,6,10)] ; d=8
состояние e43 = [U=(4,3) ; L=(8,4,5,2,7,6,1)] ; d=14
состояние e’43 = [U=(4,3) ; L=(7,6,1,8,4,5,2)] ; d=14 (не поддерживается)
состояние e34 = [U=(3,4) ; L=(7,6,1,8,4,5,9)] ; d=9
состояние e’34 = [U=(3,4) ; L=(7,6,1,8,4,9,5)] ; d=10 (не поддерживается)
состояние e25 = [U=(2,5) ; L=(7,6,1,8,4,9,3)] ; d=11
состояние e’25 = [U=(2,5) ; L=(7,6,1,8,9,3,4)] ; d=11 (не поддерживается)
Этап 8 создания
состояние e53 = [U=(5,3) ; L=(8,4,5,2,7,6,10,1)] ; d=15 (не поддерживается)
состояние e’53 = [U=(5,3) ; L=(8,4,5,2,7,6,1,10)] ; d=14
состояние e44 = [U=(4,4) ; L=(8,4,5,2,7,6,1,9)] ; d=14
состояние e’44 = [U=(4,4) ; L=(7,6,1,8,4,5,9,2)] ; d=15 (не поддерживается)
состояние e35 = [U=(3,5) ; L=(7,6,1,8,4,5,9,3)] ; d=15
состояние e’35 = [U=(3,5) ; L=(7,6,1,8,4,9,3,5)] ; d=15 (не поддерживается)
Этап 9 создания
состояние e54 = [U=(5,4) ; L=(8,4,5,2,7,6,1,10,9)] ; d=15 (не поддерживается)
состояние e’54 = [U=(5,4) ; L=(8,4,5,2,7,6,1,9,10)] ; d=14
состояние e45 = [U=(4,5) ; L=(8,4,5,2,7,6,1,9,3)] ; d=20
состояние e’45 = [U=(4,5) ; L=(7,6,1,8,4,5,9,3,2)] ; d=22 (не поддерживается)
Этап 10 создания
состояние e55 = [U=(5,5) ; L=(8,4,5,2,7,6,1,9,10,3)] ; d=21 не поддерживается)
состояние e’55 = [U=(5,5) ; L=(8,4,5,2,7,6,1,9,3,10)] ; d=20
Состояние e’55 является, следовательно, конечным состоянием, из которого получается список L=(8,4,5,2,7,6,1,9,3,10) как лист LC комплектации. Это показано на фиг. 7В. После того, как лист переупорядочен по порядку (окончательное установление очередности) системой 91 установления последовательности и буферного хранения, мы получаем лист (1,2,3,4,5,6,7,8,9,10), показанный на фиг. 7С.
На фиг. 6 показано дерево состояний (и, более точно, значений U этих состояний), просматриваемое в этом примере посредством алгоритма, показанного на фиг. 5.
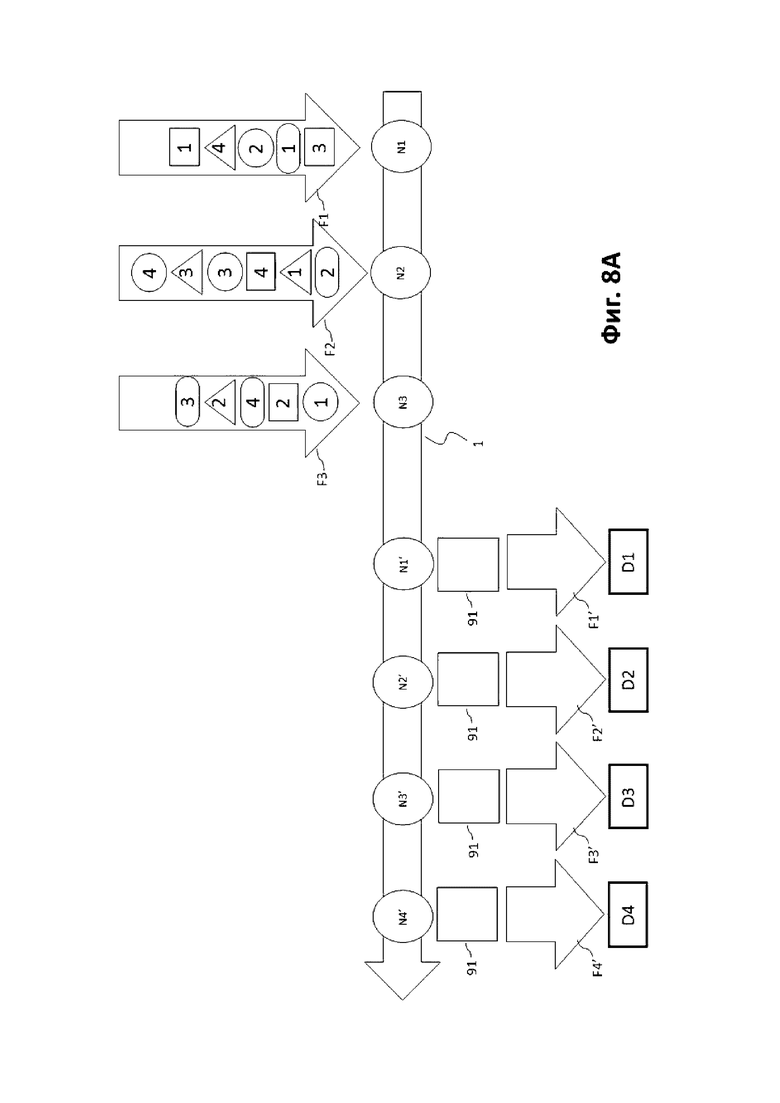
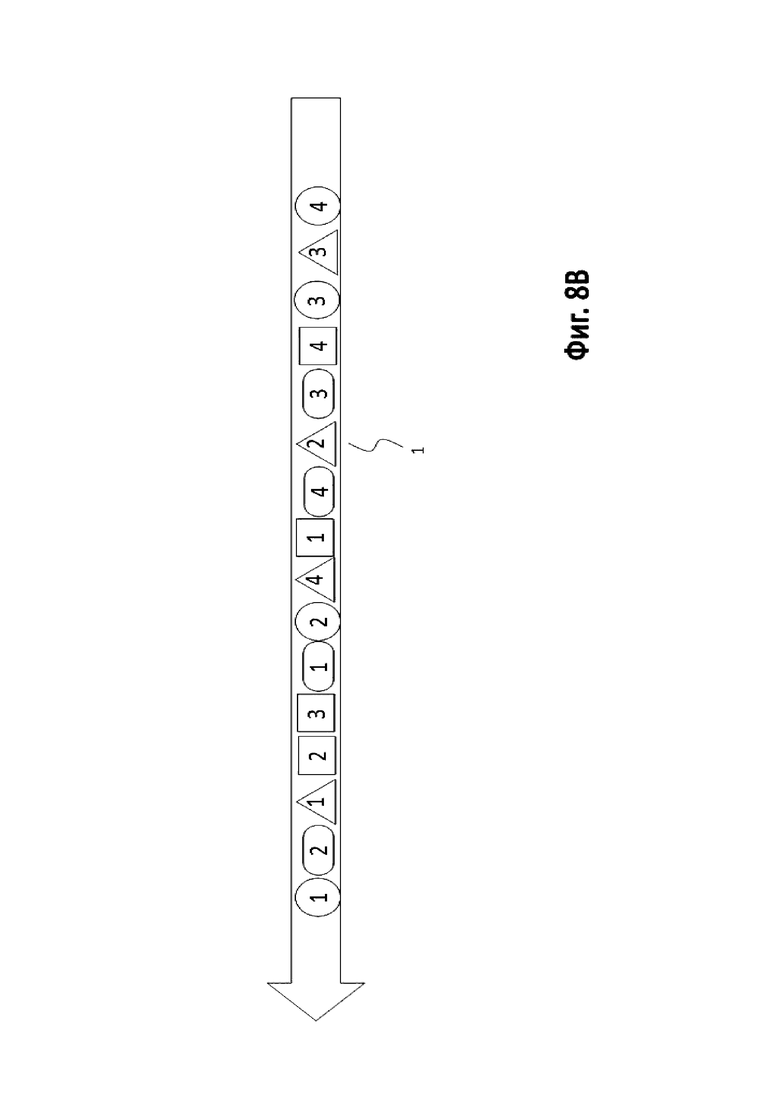
Опять, на фиг. 8А, 8В и 8С показана обработка заказа клиента с помощью способа установления последовательности грузов, соответствующего изобретению, во второй реализации с несколькими местами получения. На фиг. 8А, 8В и 8С соответственно показаны следующие три этапа этой обработки: грузы перед комплектацией на коллекторе, грузы после комплектации на коллекторе и грузы после окончательного определения очередности.
В этом примере предполагается, что существуют три источника S1, S2 и S3 и четыре места получения D1, D2, D3 и D4. Имеются два заказа клиентов, которые должны быть обработаны, по одному для каждого места получения. Каждый из этих заказов клиентов перечисляет четыре груза, имеющих следующие последовательные порядковые номера в месте получения: 1, 2, 3 и 4. На чертежах грузы обозначаются их последовательным порядковым номером в месте получения, а также геометрическим кодом, соответствующим их месту получения (овал для D1, треугольник для D2, прямоугольник для D3 и круг для D4).
Как показано на фиг. 8A, буферное устройство F1 источника (после источника S1) содержит пять грузов, соответствующих следующей последовательности: 3r, 1o, 2c, 4t и 1r (где буквы o, t, r и c, соответственно, соответствуют “овалу”, “треугольнику”, “прямоугольнику” и “кругу”, чтобы указать их места получения (D1, D2, D3 и D4, соответственно). Буферное устройство F2 источника (находящееся после источника S2) содержит шесть грузов в соответствии со следующей последовательностью: 2o, 1t, 4r, 3c, 3t и 4c. Буферное устройство F3 источника (находящееся после источника S3) содержит пять грузов в следующей последовательности: 1c, 2r, 4o, 2t и 3o. Поэтому, имеем n=16, p(1)=5 и p(2)=6 и р(3)=5.
На фиг. 8В показан лист комплектации, полученный, применяя алгоритм, приведенный на фиг. 5: LC=(1c, 2o, 1t, 2r, 3r, 1o, 2c, 4t, 1r, 4o, 2t, 3o, 4r, 3c, 3t, 4c). Отмечается беспорядок из-за расположения грузов 1r и 3o.
На фиг. 8C показаны грузы, расставленные в точной последовательности в других буферных устройствах F1’-F5’ мест получения после упорядочивания (окончательного установления очередности) системой 91 установления последовательности и буферного хранения.
На фиг. 9А и 9В показана обработка заказа клиента с помощью способа установления последовательности грузов, соответствующего изобретению, в третьей реализации с использованием замещающих последовательных порядковых номеров в месте получения. На фиг. 9А и 9В соответственно показаны два соответствующих состояния этой обработки: грузы перед сбором на коллекторе и грузы после сбора на коллекторе.
Мы рассматриваем случай (вариант, дополнительно относящийся к сказанному выше), в котором способ установления последовательности грузов, показанный на фиг. 3, содержит предварительный этап 30 (перед этапом 31 для создания листа комплектации). На этом предварительном этапе 30 система управления вычисляет замещающие последовательные порядковые номера в месте получения как функцию последовательных порядковых номеров в месте получения грузов, содержащихся в буферных устройствах F1-F5 источников. Более конкретно, по меньшей мере для одной группы (или каждой группы в конкретном варианте осуществления) из R последовательных грузов, содержащихся в одном из буферных устройств источников, где R - целое число, больше или равное 2: система вычисляет замещающий порядковый номер в месте получения как функцию последовательных порядковых номеров мест получения R грузов. Затем, во время выполнения этапа 31 создания списка комплектации система управления использует замещающий последовательный порядковый номер в месте получения для каждого из R грузов.
В конкретном варианте осуществления вычисление, производимое на этапе 30 для каждой группы из R грузов, содержит следующее:
● вычисление среднего значения последовательных порядковых номеров в месте получения R грузов;
● вычисление значения беспорядка R грузов как функции последовательных порядковых номеров в месте получения R грузов (примеры функций вычисления беспорядка уже были дополнительно описаны выше);
● если значение беспорядка R грузов превышает заданный порог, замещающий последовательный порядковый номер в месте получения является средним значением, округленным вверх до следующего целого числа; если заданный порог не превышается, то замещающий последовательный порядковый номер в месте получения является средним значением, округленным вниз до следующего целого числа.
Заданным порогом является, например: S=0. В этом случае, мы берем среднее значение, округленное вниз до следующего целого числа, только если не существует никакого беспорядка в R грузах. В одном из вариантов S больше нуля (например, S=4). В этом случае мы принимаем значение допуска, которое имеет среднее значение, округленное вниз до меньшего целого числа, до тех пор, пока количество R грузов меньше S.
В примере, показанном на фиг. 9A, предполагается, что, как в примере на фиг. 8A, существуют три источника S1, S2 и S3 (и, следовательно, три буферных устройства F1, F2 и F3 источников), четыре места D1, D2, D3 и D4 получения и четыре заказа клиентов, которые должны быть обработаны (по одному для каждого места получения). Мы добавляем следующее ограничение: грузы буферных устройств источников должны собираться друг за другом по R (то есть, по R за один раз) (где в этом примере).
В примере, показанном на фиг. 9А, мы имеем следующие группы (отмечены пунктиром): для буферного устройства F1 источника, (3r,1o) и (2c,4t) (поскольку груз 1r является одиночным, он не учитывается); для буферного устройства F2 источника, (2o,1t), (4r,3c) и (3t,4c); для буферного устройства F3 источника, (1c, 2r) и (4o,2t) (поскольку груз 3o является одиночным, он не учитывается). В этом примере грузы 1r и 3o не являются частью группы грузов. Поэтому для них не делается вычисления замещающего порядкового номера в месте получения. Они не учитываются на этапе 31 создания списка комплектации (другими словами, они не являются частью n грузов, которые должны быть собраны). Они будут учитываться, когда система управления запустит новое выполнение этапов способа в случае модификации набора из n грузов, которые должны быть собраны (то есть, в случае положительного результата на этапе 34 тестирования). В одном из вариантов или также, если не существует модификации набора из n грузов, которые должны быть собраны, грузы 1r и 3o (с их последовательным порядковым номером в месте получения) сразу же учитываются на этапе 31 при создании списка комплектации.
Для каждой из этих групп результат вычисления на этапе 30 (принимая S=0) указывается в скобках справа от каждого груза в группе. Рассмотрим два примера с различными округленными значениями:
● для группы (2o,1t) буферного устройства F2 источника: замещающий последовательный порядковый номер в месте получения равен 2 (среднее значение 2 и 1 равно 1,5; значение, округленное вверх до следующего целого числа, поскольку среди двух грузов существует беспорядок);
● для группы (1c,2r) буферного устройства F3 источника: замещающий последовательный порядковый номер в месте получения равен 1 (среднее значение 1 и 2 равно 1,5; значение, округленное вниз до следующего целого числа, поскольку среди двух грузов нет беспорядка).
На фиг. 9В показан лист комплектации, полученный применением алгоритма, показанного на фиг. 5 с замещающими последовательными порядковыми номерами в месте получения (за исключением грузов 1r и 3o, которые учитываются с последовательными порядковыми номерами мест): LC=(1c, 2o, 1t, 2r, 3r, 1o, 2c, 4t, 1r, 4o, 2t, 3o, 4r, 3c, 3t, 4c).
Изобретение относится к логистике, в частности к автоматизированным системам распределения грузов. Автоматизированная система распределения грузов содержит k источников (S1-S5), где k≥2; по меньшей мере одно место получения; буферные устройства k источников типа FIFO, причем каждый из принимаемых грузов поступает от одного из k источников; коллектор, собирающий грузы, поступающие от буферных устройств k источников и транспортирующий их в упомянутое по меньшей мере одно место получения, где коллектор содержит k последовательных узлов, каждый из которых выполнен с возможностью комплектации грузов, поступающих от одного из буферных устройств источников; и систему управления, выполненную с возможностью обработки заказов клиентов, где каждый заказ клиента перечисляет грузы для заданного места получения и каждый заказ связывается с последовательным порядковым номером в месте получения. Согласно способу установления последовательности, реализуемому упомянутой системой управления в автоматизированной системе распределения грузов, система управления выполняет следующие этапы, на которых: составляют список комплектации, содержащий n грузов относительно восходящего порядка последовательных порядковых номеров в месте получения, причем упомянутые n грузов содержатся в буферных устройствах источников, где  , p(i) - количество грузов, которые должны быть собраны в буферном устройстве i-го источника; и управляют (32) коллектором и буферными устройствами источников для выполнения комплектации грузов на коллекторе в соответствии с упомянутым листом комплектации. В результате система управления выстраивает лист комплектации просто и автоматически с высококачественными характеристиками. 3 н. и 8 з.п. ф-лы, 16 ил.
, p(i) - количество грузов, которые должны быть собраны в буферном устройстве i-го источника; и управляют (32) коллектором и буферными устройствами источников для выполнения комплектации грузов на коллекторе в соответствии с упомянутым листом комплектации. В результате система управления выстраивает лист комплектации просто и автоматически с высококачественными характеристиками. 3 н. и 8 з.п. ф-лы, 16 ил.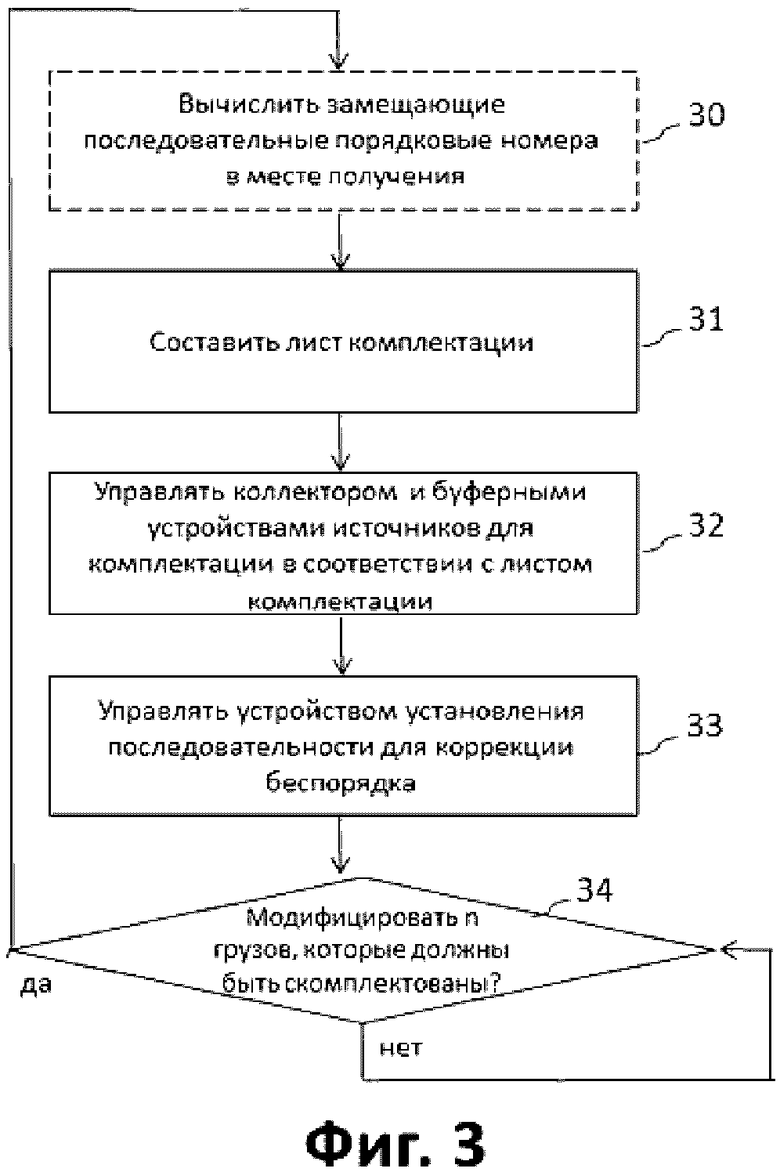
1. Способ установления последовательности грузов, реализуемый системой (90) управления в автоматизированной системе распределения грузов, содержащей:
- k источников (S1-S5), где k≥2;
- по меньшей мере одно место (D1-D5) получения;
- буферные устройства (F1-F5) k источников типа "first-in first-out" (первым вошел, первым вышел)), каждое из которых принимает грузы, поступающие от одного из k источников;
- коллектор (1), собирающий грузы, поступающие от буферных устройств k источников, и транспортирующий их к упомянутому по меньшей мере одному месту получения, причем коллектор содержит k последовательных узлов (N1-N5), каждый из которых выполнен с возможностью сбора грузов, приходящих от одного из буферных устройств k источников; и
- упомянутую систему (90) управления, выполненную с возможностью обработки заказов клиентов, где каждый заказ клиента перечисляет грузы для заданного места получения и связывается с последовательным порядковым номером в месте получения;
отличающийся тем, что упомянутая система управления выполняет следующие этапы, на которых:
- составляют (31) лист комплектации, содержащий n грузов, которые должны быть собраны, и понижают беспорядок упомянутых n грузов относительно восходящего порядка последовательных порядковых номеров мест получения, причем упомянутые n грузов содержатся в буферных устройствах источников, где  , p(i) - количество грузов, которые должны быть собраны в i-м буферном устройстве источника; и
, p(i) - количество грузов, которые должны быть собраны в i-м буферном устройстве источника; и
- управляют (32) коллектором и буферными устройствами источников, чтобы выполнить сбор грузов на коллекторе в соответствии с упомянутым списком комплектации,
и в котором этап составления списка комплектации содержит следующие этапы, на которых:
(a) инициируют (501) первый набор состояний E1 с одиночным состоянием einit=(Uinit, Linit), где Uinit - k-апплет, содержащий k нулей, и Linit - пустой лист;
(b) инициируют (502) второй набор состояний Е2 с пустым значением;
(с) для каждого этапа (503) составления из числа n последовательных этапов составления списка:
(c.1) для каждого состояния e из E1 (504), где e=(U, L), U - k-апплет, содержащий k элементов, U=(z1, …, zk), где zi - количество грузов, взятых из i-го буферного устройства источника,  , и L - лист грузов, связанных с U:
, и L - лист грузов, связанных с U:
(c.1.1) для каждого значения  :
:
(c.1.1.1) если U(f)<p(f), где U(f) - количество грузов f-го буферного устройства источника, содержащегося в L, и p(f) - количество грузов, которое должно быть собрано в f-м буферном устройстве источника:
-i- создают (507) новое состояние eN=(UN,LN), начиная с e=(U, L), с добавлением 1 к U(f) и добавлением в конце L груза, занимающего (U(f)+1)-е положение в последовательности грузов, содержащихся в f-м буферном устройстве источника;
-ii- вычисляют (508) значение беспорядка d списка LN нового состояния eN, где функция вычисления беспорядка относительно восходящего порядка последовательных порядковых номеров в месте получения;
-iii- если E2 содержит другое новое состояние e’N=(U’N,L’N), где U’N= UN и d’ - значение беспорядка списка L’N (501): если d<d’, eN заменяет e’N в E2 (514), и если d≥d’, eN не вставляется в E2 (513);
-iv- если E2 не содержит упомянутое другое новое состояние e’N, eN вставляется в E2 (511);
(c.2) если этап создания не является n-м этапом создания: E2 становится новым набором состояний E1 и способ переходит к следующему этапу создания;
(c.3) если этап создания не является n-м этапом создания: E2 содержит одиночное конечное состояние eF=(UF,LF) и LF формирует упомянутый лист комплектации (516).
2. Способ по п. 1, в котором на этапе (c.1.1.1) система управления также проверяет (506а), является ли N(f)<yf, где N(f) - самая длинная последовательность грузов f-го буферного устройства источника, помещенных последовательно в L, и yf - заданный порог, и в котором этапы (i)-(iv) выполняются, только если U(f)<p(f) и N(f)<yf.
3. Способ по любому из пп. 1, 2, в котором этап -ii- сопровождается следующим этапом, на котором:
-iia- если d>dH, где dH - заданное значение, новое состояние e1 не вставляется в E2 и этапы (iii) и (iv) не выполняются.
4. Способ по п. 3, в котором заданное значение dH вычисляется следующим образом:
- составляют ссылочный лист LH, содержащий упомянутые n грузов, составляемый следующим образом:
* первый груз из LH является грузом, имеющим наименьший последовательный порядковый номер в месте получения из числа грузов, действительно готовых покинуть буферные устройства k источников;
* каждый последующий груз из LH является грузом, имеющим наименьший последовательный порядковый номер в месте получения из числа грузов, готовых покинуть k буферных устройств источников, произвольно предполагая, что предшествующие грузы из LH покинули буферные устройства k источников;
- вычисляют dH как значение беспорядка списка LH с помощью упомянутой функции вычисления беспорядка.
5. Способ по любому из пп. 1-4, в котором упомянутая функция вычисления беспорядка для списка М из q грузов записывается следующим образом:  , где K(i) - количество грузов в списке M, помещенных перед i-м грузом списка М и имеющих последовательный порядковый номер в месте получения, меньший или равный последовательному порядковому номеру i-го груза из списка M.
, где K(i) - количество грузов в списке M, помещенных перед i-м грузом списка М и имеющих последовательный порядковый номер в месте получения, меньший или равный последовательному порядковому номеру i-го груза из списка M.
6. Способ по любому из пп. 1-5, в котором грузы из заданного заказа клиента должны достигать заданного места получения в заданном возрастающем последовательном порядке в месте получения и в котором упомянутая система управления выполняет этап управления (33) по меньшей мере одним устройством (91) установления последовательности, помещенным между коллектором и упомянутым по меньшей мере одним местом получения, чтобы корректировать беспорядок n грузов.
7. Способ по любому из пп. 1-6, в котором система управления выполняет следующий этап перед этапом (31) создания списка комплектации по меньшей мере для одной группы из R последовательных грузов, содержащихся в одном из буферных устройств источников, где R - целое число, большее или равное 2, на котором:
- вычисляют (30) замещающий последовательный порядковый номер в месте получения как функцию последовательных порядковых номеров мест получения R грузов; и
в котором для выполнения этапа (31) создания листа комплектации система управления использует замещающий последовательный порядковый номер в месте получения для каждого из R грузов.
8. Способ по. п. 7, в котором вычисление замещающего последовательного порядкового номера в месте получения как функции последовательных порядковых номеров в месте получения R грузов содержит:
- вычисление среднего значения последовательных порядковых номеров в месте получения R грузов;
- вычисление значения беспорядка R грузов как функции последовательных порядковых номеров в месте получения R грузов;
- если значение беспорядка R грузов превышает заданный порог, замещающий последовательный порядковый номер в месте получения является средним значением, округленным вверх до следующего целого числа; если заданный порог не превышается, то замещающий последовательный порядковый номер в месте получения является средним значением, округленным вниз до следующего целого числа.
9. Способ по любому из пп. 1-8, в котором новое выполнение этапов способа запускается, если введение по меньшей мере одного нового груза в одно из буферных устройств источников подталкивает к модификации грузов, которые должны собираться в упомянутом буферном устройстве источника, и, следовательно, n грузов, которые должны собираться во всех буферных устройствах k источников.
10. Считываемый компьютером постоянный носитель (93) запоминающего устройства, хранящий компьютерную программу (930), содержащую команды управляющей программы для реализации способа по любому из пп. 1-9, когда упомянутая программа выполняется на компьютере.
11. Автоматизированная система распределения грузов, содержащая:
- k источников (S1-S5), где k≥2;
- по меньшей мере одно место (D1-D5) получения;
- буферные устройства (F1-F5) k источников типа "first-in first-out" (первым вошел, первым вышел)), каждое из которых принимает грузы, поступающие от одного из k источников;
- коллектор (1), собирающий грузы, поступающие от буферных устройств k источников, и транспортирующий их к упомянутому по меньшей мере одному месту получения, причем коллектор содержит k последовательных узлов (N1-N5), каждый из которых выполнен с возможностью сбора грузов, приходящих от одного из буферных устройств k источников; и
- систему управления (90), выполненную с возможностью обработки заказов клиентов, где каждый заказ клиента перечисляет грузы для заданного места получения и связывается с последовательным порядковым номером в месте получения;
отличающаяся тем, что упомянутая система управления содержит вычислительную машину (91, 92, 93), выполненную с возможностью:
- составления списка комплектации, содержащего n грузов, которые должны быть собраны, и снижения беспорядка упомянутых n грузов относительно восходящего порядка последовательных порядковых номеров в месте получения, причем упомянутые n грузов содержатся в буферных устройствах источников, где , p(i) - количество грузов, которые должны быть собраны в буферном устройстве i-го источника; и
- управления коллектором и буферными устройствами источников для сбора грузов на коллекторе в соответствии с упомянутым списком комплектации;
и в котором вычислительная машина (91, 92, 93) выполнена с возможностью составления списка комплектации, выполняя следующие этапы, на которых:
(a) инициируют (501) первый набор состояний E1 с единственным состоянием einit=(Uinit, Linit), где Uinit - k-апплет, содержащий k нулей, и Linit - пустой список;
(b) инициируют (502) второй набор состояний Е2 с пустым значением;
(c) для каждого этапа (503) составления из числа n последовательных этапов составления:
(c.1) для каждого состояния e из E1 (504), где e=(U, L), U - k-апплет, содержащий k элементов, U=(z1, …, zk), где zi - количество грузов, взятых из буферного устройства i-го источника, , и L - список грузов, связанных с U:
(c.1.1) для каждого значения :
(c.1.1.1) если U(f)<p(f), где U(f) - количество грузов f-го буферного устройства источника, содержащегося в L, и p(f) - количество грузов, которое должно быть собрано в буферном устройстве (506) f-го источника:
-i- создают (507) новое состояние eN=(UN,LN), начиная с e=(U, L), с добавлением 1 к U(f) и добавлением в конце L груза, занимающего (U(f)+1)-е положение в последовательности грузов, содержащихся в буферном устройстве f-го источника;
-ii- вычисляют (508) значения беспорядка d списка LN нового состояния eN, где функция вычисления беспорядка относительно восходящего порядка последовательных порядковых номеров мест получения;
-iii- если E2 содержит другое новое состояние e’N=(U’N,L’N), где U’N= UN и d’ - значение беспорядка списка L’N: если d<d’, eN заменяет e’N в E2 и если d≥d’, eN не вставляется в E2 (513);
-iv- если E2 не содержит упомянутое другое новое состояние e’N, eN вставляется в E2 (511);
(c2) если этап создания не является n-м этапом создания: E2 становится новым набором состояний E1 и способ переходит к следующему этапу создания;
(c.3) если этап создания не является n-м этапом создания: E2 содержит одиночное конечное состояние eF=(UF,LF) и LF формирует упомянутый список комплектации (516).
| FR 3058708 A1, 18.05.2018 | |||
| FR 2915979 A1, 14.11.2008 | |||
| FR 3051948 A1, 01.12.2017 | |||
| МНОГОФУНКЦИОНАЛЬНЫЙ ГОРОДСКОЙ КОМПЛЕКС И АВТОМАТИЗИРОВАННАЯ ПОДЗЕМНАЯ СИСТЕМА АДРЕСНОЙ ДОСТАВКИ ГРУЗОВ | 2013 |
|
RU2526202C1 |

