Изобретение относится к области регулирования движения дорожного транспорта, а именно к способам выявления нарушений правил дорожного движения (ПДД) и может применятся для автоматического круглосуточного определения и регистрации транспортных средств, нарушивших ПДД.
В системах фиксации нарушений ПДД (остановки и стоянки, проезда перекрестков и железнодорожных переездов, пропуска пешеходов и др.) для нахождения автомобиля, определения факта его остановки или построения траектории движения и его идентификации в основе лежит поиск государственного регистрационного знака (ГРЗ) на видеокадрах.
Системы должны работать в разных погодных условиях, днем и ночью. Обычно видеокамеры имеют встроенную систему настройки экспозиции, адаптирующую режим работы камеры к условиям съемки. Также применяется инфракрасная (ИК) подсветка, которая включается в ночное время.
Однако эта система ориентирована на получение наиболее качественного изображения в целом, а отнюдь не изображения, на котором наиболее качественно распознается ГРЗ. При этом режим съемки для оптимального распознавания ГРЗ может существенно отличаться от режима, необходимого для получения в целом оптимального кадра в тех же условиях. Так, если солнце светит из-за камеры («со спины»), то при оптимальном в целом кадре ГРЗ оказывает пересвеченным, так как имеет высокий коэффициент отражения. Напротив, при встречном освещении изображение ГРЗ оказывается слишком темным для нормального распознавания ГРЗ
Наиболее близким к предполагаемому изобретению является способ, описанный в патенте RU 149201 U1. В системе видеофиксации нарушений по патенту RU 149201 U1 упоминается автоматическое переключение режима «день-ночь» для обеспечения круглосуточной работы. Ночью камера переводится из цветного в монохромный режим и включается ИК прожектор подсветки. Однако это не решает перечисленных выше проблем.
Недостатком прототипа является то, что камера не распознает качественно ГРЗ.
Задачей заявленного изобретения является создание способа настройки видеокамеры для более качественного распознавания ГРЗ в системах фиксации нарушений ПДД.
Поставленная задача достигается за счет того, что способ предполагает использование собственного механизма настройки камеры, ориентированного на оптимальное распознавание ГРЗ, вместо обычного режима, характерная яркость изображения, на которую должна настраиваться камера, различны для дня и ночи, оптимальные значения для дня и ночи найдены эмпирически для используемого нами алгоритма распознавания ГРЗ. Для промежуточных режимов оптимальное значение находим линейной интерполяцией, определение фактической освещенности по параметрам камеры, которые пришлось установить, чтобы получить требуемую яркость, и коррекция требуемой яркости исходя из полученной фактической освещенности, переход от режима грубой настройки к режиму точной настройки на сами номерные пластины.
Сущность технического решения поясняется чертежом.
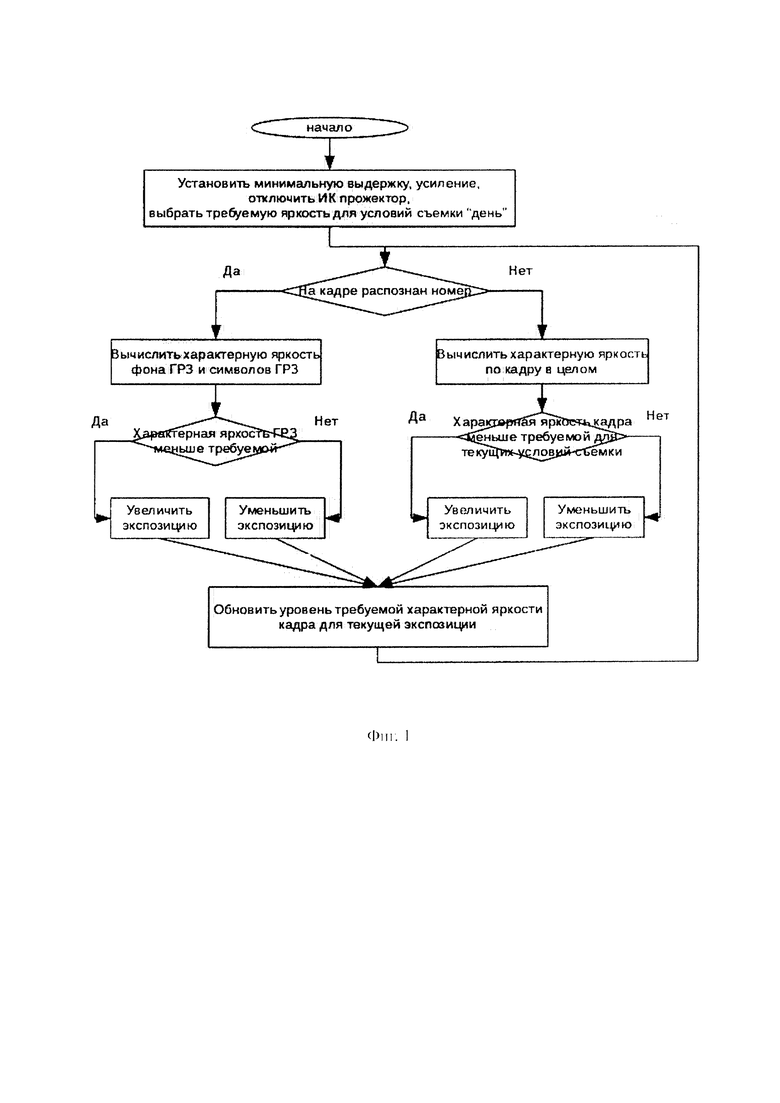
На фиг 1 изображена схема работы способа настройки видеокамеры для более качественного распознавания ГРЗ в системах фиксации нарушений ПДД.
Согласно изобретению, предлагается следующий механизм для настройки оптимального режима работы камеры.
Для этого необходимо использовать камеры, в которых можно отключить автоматический режим настройки экспозиции и которые позволяют управлять им программно.
Производится управление следующими параметрами: выдержка, включение/выключение подсветки, усиление.
Алгоритм ориентируется на 2 уровня настройки: грубый (на характерную яркость кадра) и точный (на характерные яркости в области ГРЗ). Пока ГРЗ не распознаются, выполняется грубая настройка. Когда режим работы камеры настроен в соответствии с требованиями грубой настройки, если ГРЗ распознаются, выполняется коррекция настройки для улучшения распознавания ГРЗ.
В основу механизма грубой настройки положено достижение эмпирически найденной «характерной яркости» изображения для данной фактической освещенности сцены (определяемой временем суток и погодными условиями).
Характерная яркость («яркость асфальта») определяется как медиана или заданная квантиль (значение квантили - параметр алгоритма) яркостей точек изображения. Это позволяет исключить из рассмотрения области засветки (например, от фар) и наиболее темные участки.
Для различной освещенности сцены (в частности для дневного и ночного времени) оптимальная характерная яркость различна.
Алгоритм в начале работы с включенным ПК прожектором корректирует выдержку и усиление так, чтобы получить характерную яркость вблизи середины динамического диапазона камеры.
Для достижения требуемой характерной яркости в начале работы алгоритм (Фиг. 1) устанавливает минимальное усиление и выдержку и начинает увеличивать выдержку так, чтобы получить требуемую характерную яркость. Если освещенность сцены так низка, что выдержка увеличивается до времени импульса ИК прожектора (около 1/1000 с), но требуемая характерная яркость не получена, алгоритм включает ИК прожектор и увеличивает усиление. После того, как усиление достигает максимума, алгоритм продолжает увеличивать выдержку. Процесс продолжается, пока наблюдаемая характерная яркость изображения не достигнет требуемой. В дальнейшем, если получаемая характерная яркость выше требуемой, алгоритм корректирует параметры в сторону ее уменьшения в обратном порядке.
После того, как в ходе описанного выше процесса достигнута требуемая характерная яркость, по установленным для этого параметрам камеры (выдержка и усиление, при которых достигнуто требуемое значение) определяется фактическая освещенность сцены. Для различных уровней освещенности эмпирически определена оптимальная характерная яркость. В текущей реализации определены оптимальные уровни для дневного (выдержка<некоторого порога) и ночного (выдержка и усиление>некоторого порога) режимов. В промежутке требуемая характерная яркость рассчитывается линейно.
После того, как определена характерная яркость для данного уровня освещенности, алгоритм в соответствии с описанным выше порядком корректирует параметры камеры, чтобы получить уточненное требуемое значение характерной яркости.
Коррекция параметров происходит на небольшую величину в единицу времени так, что требуемы значения достигаются за время порядка одной - нескольких минут. Это позволяет избежать реакции на временные быстрые изменения освещенности (блики фар и т.п.)
Когда режим работы камеры настроен достаточно близко к оптимальному так, что алгоритм распознавания номеров начинает находить ГРЗ, вместо настройки на оптимальную характерную яркость алгоритм начинает корректировать параметры так, чтобы достичь оптимального качества изображения в пределах найденной рамки номера. В качестве параметров качества изображения в пределах рамки используется характерная яркость фона номера и символов номера, рассчитываемые как 90% и 5% квантили яркостей точек в пределах найденной рамки номера. На каждом кадре алгоритм изменяет на небольшую величину параметры камеры в описанном выше порядке в сторону получения более темного или более светлого изображения так, чтобы приблизить к оптимальным характерные яркости в области ГРЗ к оптимальным (Фиг. 1).
Техническим результатом от использования заявленного технического решения является повышение качества работы системы распознавания ГРЗ при работе в изменяющихся, в том числе неблагоприятных условиях освещения: уменьшение количества не распознанных номеров и ошибочно распознанных номеров. В том числе работоспособность системы в условиях освещения, при которых без использования заявленного решения работа системы распознавания ГРЗ не обеспечивается.
Изобретение относится к области регулирования движения дорожного транспорта. Способ настройки видеокамеры для более качественного распознавания ГРЗ в системах фиксации нарушений ПДД состоит в том, что вместо встроенного в видеокамеру механизма автоматического выбора параметров работы в зависимости от условий съемки используется программный механизм настройки режима работы камеры. При этом указанный программный механизм предусматривает два режима настройки камеры: 1) грубой настройки, когда ГРЗ не видны в кадре или не распознаются, и 2) тонкой настройки, когда ГРЗ видны в кадре и распознаются. Механизм грубой настройки использует эмпирически найденные значения характерной яркости кадра, оптимальные для распознавания ГРЗ при различных уровнях яркости снимаемой сцены, где уровень яркости снимаемой сцены определяется по параметрам настройки камеры. Механизм тонкой настройки используется, когда в кадре есть программно найденные изображения ГРЗ, и корректирует режим работы видеокамеры для достижения оптимальных характерных яркостей фона и символов на найденных ГРЗ. Достигается повышение качества распознавания ГРЗ в системах фиксации нарушений ПДД. 1 ил.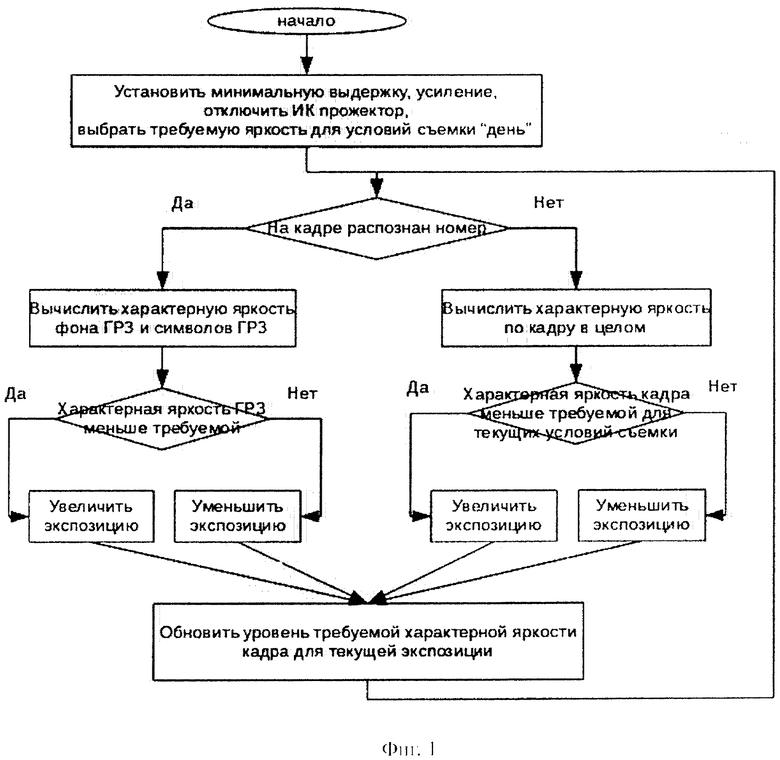
Способ настройки видеокамеры для более качественного распознавания ГРЗ в системах фиксации нарушений ПДД, состоящий в том, что:
- вместо встроенного в видеокамеру механизма автоматического выбора параметров работы в зависимости от условий съемки используется программный механизм настройки режима работы камеры, ориентированный на оптимальное распознавание ГРЗ;
- при этом указанный программный механизм предусматривает два режима настройки камеры: 1) грубой настройки, когда ГРЗ не видны в кадре или не распознаются, и 2) тонкой настройки, когда ГРЗ видны в кадре и распознаются;
- механизм грубой настройки использует эмпирически найденные значения характерной яркости кадра, оптимальные для распознавания ГРЗ при различных уровнях яркости снимаемой сцены, где уровень яркости снимаемой сцены определяется по параметрам настройки камеры, которые потребовались для получения требуемой характерной яркости, причем:
a) в качестве одного из возможных способов определения характерной яркости используется медианное значение яркости различных точек кадра или квантиль заданного уровня яркостей различных точек кадра,
b) в качестве одного из возможных способов определения требуемого уровня характерной яркости для данных условий используются эмпирически найденные уровни характерной яркости и параметров работы камеры в условиях солнечного дня и в условиях ночи и для промежуточных условий работы требуемый уровень характерной яркости определяется линейной интерполяцией;
- механизм тонкой настройки используется, когда в кадре есть программно найденные изображения ГРЗ, и корректирует режим работы видеокамеры для достижения оптимальных характерных яркостей фона и символов на найденных ГРЗ, причем в качестве одного из возможных способов яркость фона определяется как 90% квантиль яркостей точек в пределах программно найденного изображения ГРЗ, а яркость символов как 5% квантиль яркостей этих точек;
- при настройке параметров работы камеры используется следующий порядок их изменения по мере уменьшения яркости снимаемой сцены: а) уменьшение выдержки при выключенном ПК прожекторе и минимальном аналоговом усилении до значения выдержки, приблизительно равного длительности импульса ИК прожектора, б) включение ИК прожектора, в) увеличение аналогового усиления при неизменной выдержке до уровня максимального, г) дальнейшее увеличение выдержки.
| Строительная панель | 1961 |
|
SU149201A1 |
| Устройство для отделения готовых продуктов тонкого и грубого помола, используемое, например, в комплекте с бильной мельницей | 1960 |
|
SU136616A1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ГОСУДАРСТВЕННОГО РЕГИСТРАЦИОННОГО НОМЕРА ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2563102C1 |

