Область техники, к которой относится изобретение
Изобретение относится к устройствам для измерения параметров движения транспорта, в частности, скорости и дальности. Предназначено для автоматизированного контроля за движением транспортных средств (далее – ТС), в том числе и по многополосным дорогам, синхронного распознавания их государственных номерных знаков (далее – ГРЗ), выявления и фиксации нарушений правил дорожного движения (далее – ПДД), в том числе для фиксации транспортных средств, превышающих скорость, а также для сбора статистической информации.
Уровень техники
Известно лазерное устройство для контроля движения транспортных средств (Laser video vehicle detection system, CN102722985 (A) ― 2012-10-10), включающее лазерный излучатель с оптической системой, фотоприемник, блок обработки данных и устройство отображения информации, предназначенное для измерения скорости транспортных средств.
Известно устройство определения скорости движения и координат транспортных средств ЛИДС https://www.polyus.info/products-and-services/laser-velocimeters/522844/. Устройство представляет собой моноблок, содержащий лазерный излучатель и фотоприемник, конструктивно объединенные с блоком видеокамеры. Измерение скорости происходит посредством многократного измерения дальности с последующим вычислением скорости, как производной от дальности по времени. Информация о скорости выводится на ЖКИ-экран вместе с изображением автомобиля, скорость которого измеряется.
Известен лазерный измерительный комплекс компании LaserTech http://www.lasertech.com/PicoDigiCam.aspx, в состав которого входит передвижной лазерный измеритель скорости и дальности, видеокамера с телеобъективом, а также компьютерный модуль для распознавания ГРЗ. Система устанавливается на треноге и питается от внешнего аккумулятора. Обеспечивает возможность измерения скорости и дальности до ТС, попавшего в лазерный луч, а также распознавание ГРЗ этого транспортного средства. Недостатком комплекса является весьма длительный цикл измерений (1-3 измерения в секунду), что не позволяет направлять лазерный луч под углом к транспортному потоку, а, следовательно, и контролировать цели на многополосных дорогах. Проведение измерений под малым углом к транспортному потоку приводит к необходимости измерений на расстояниях порядка нескольких сотен метров и осложнено затенением измеряемого ТС другими автомобилями, двигающимися по ближним полосам. Недостатком аналога является также тот факт, что распознавание ГРЗ является лишь дополнительной информационной функцией комплекса, никак не влияющей процесс измерений
Известно устройство фиксации нарушений скоростного режима движения автомобильного транспорта АМАТА (http://amata-sc.ru/), наиболее близкое к заявляемому решению и принятое за прототип, содержащее лазерный измеритель скорости, видеокамеру и блок обработки данных, предназначенное для измерения скорости и фотовидеофиксации нарушений ПДД. В качестве устройства отображения используется жидкокристаллический экран, на котором отображается прицельная метка, указывающая на положение лазерного луча. Данная метка на изображении ТС является доказательством того, что измеренная скорость принадлежит именно тому транспортному средству, изображение которого в данный момент зафиксировано. Известное устройство предназначено для измерения скорости, выявления нарушений скоростного режима и видеофиксации нарушителей — иными словами, для сбора той информации, которая необходима оператору для подтверждения факта нарушения. В качестве дополнительной опции предлагается трансляция полученного изображения на удаленный компьютер с защищенной USB-ключом программой распознавания ГРЗ, что позволяет ввести автоматический учет нарушителей, однако в таком случае возникают естественные задержки, связанные с передачей изображений и обработкой данных на удаленном компьютере, что не может обеспечить синхронного получения данных о ГРЗ того ТС, скорость которого измеряется, а, следовательно, не может быть использовано для оптимизации процесса измерения скорости. Кроме того, на удаленный компьютер для распознавания ГРЗ передается изображение только того автомобиля, скорость которого измерена. Время, необходимое прототипу для получения достоверного результата измерения скорости составляет 0,29-0,31сек, что приводит также к ряду негативных последствий. В частности,
Измеритель с таким большим временем обработки принципиально непригоден для работы на многополосной дороге, поскольку должен быть направлен под углом к направлению движения не более 2-3 градусов. В противном случае автомобиль выйдет из лазерного луча раньше, чем прибор успеет измерить его скорость.
Из-за малого угла к направлению движения вследствие большого времени обработки (а значит и увеличения минимально-необходимой дальности измерений), происходит затенение автомобиля впереди идущим транспортом, что снижает количество выявленных нарушений.
Производится измерение только одной цели, а именно той, изображение которой совпало с прицельной меткой. Измерение следующей цели связано с необходимостью ручного прицеливания в другой автомобиль либо ожидания случайного совмещения новой движущейся цели с узким лазерным лучом измерителя.
Задачами изобретения являются:
• Возможность проведения измерений скорости транспортного средства и дальности до него на участках дороги с многополосным движением.
• Возможность работы в многоцелевом режиме, позволяющем автоматически контролировать все ТС, обнаруженные в зоне сопровождения.
• Возможность распознавания ГРЗ и идентификации ТС, попавшего в поле зрения устройства без использования внешних вычислительных ресурсов.
• Возможность повышения точности и сокращения времени измерения до 0.1-0.2сек за счет фиксации результатов, полученных в момент точного попадания луча лазера в номерной знак.
• Возможность автоматической оценки точности измерений и фильтрации результатов по величине допустимой погрешности.
• Возможность получения результатов с повышенной точностью.
• Возможность автоматического выявления и фиксации нарушений ПДД с идентификацией ТС-нарушителя по ГРЗ.
• Оптимизация передачи данных о зафиксированных ТС в ЦОД с целью сокращения объема передаваемой информации.
Раскрытие изобретения.
Для решения поставленной задачи предложен многоцелевой многополосный лазерный измеритель параметров движения транспорта с видеофиксацией, содержащий размещенные в корпусе локационный лазерный приемо-передающий модуль, выполненный с возможностью измерения скорости и дальности, видеокамеру, блок индикации с меткой для прицеливания, положение которой соответствует положению лазерного луча в пространстве, блок связи и блок памяти, соединенные с блоком обработки информации. В отличие от известных решений заявленный измеритель дополнительно содержит подключенный к лазерному измерительному модулю электронно-механический блок управления положением лазерного луча, выполненный с возможностью поиска номерного знака в зоне сопровождения и автоматического удержания луча на номерном знаке ТС, причем блок обработки информации содержит программно-аппаратный модуль распознавания номерных знаков, блок индикации содержит дисплей, отображающий рамку для прицеливания, изображение которой соответствует размерам зоны сопровождения, а прицельная метка выполнена с возможностью автоматического сопровождения цели и перемещения внутри упомянутой рамки.
В предпочтительном варианте электронно-механический блок управления положением лазерного луча выполнен с возможностью наведения лазерного луча на номерной знак транспортного средства с использованием экранных координат его изображения, полученных в ходе распознавания номерного знака программно-аппаратным блоком распознавания.
Электронно-механический блок управления положением лазерного луча предпочтительно содержит электромеханический исполнительный механизм на основе сервоприводов с электромоторами и/или актуаторами.
Электронно-механический блок управления положением лазерного луча может содержать датчик положения лазера, выполненный на основе датчиков Холла, индуктивных, емкостных и/или оптических датчиков.
Электронно-механический блок управления положением лазерного луча может содержать цепь обратной связи, связывающей датчики положения лазера с электронным модулем управления моторами, обеспечивающими перемещение лазерного луча для его наведения на номерной знак транспортного средства.
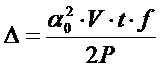
Для контроля многополосной дороги электронно-механический блок управления положением лазерного луча выполнен с возможностью смещения лазерного луча на величину Δ от центрального положения
 ,
,
где α0 – угол между оптической осью измерителя и направлением движения транспортного потока,
V- скорость цели,
f – фокусное расстояние объектива,
t - время, в течение которого контролируемое транспортное средство находится в зоне сопровождения измерителя,
Р - ширина контролируемой многополосной дороги.
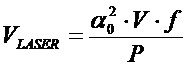
Для отслеживания номерных знаков в зоне сопровождения электронно-механический блок управления положением лазерного луча выполнен с возможностью перемещения лазерного излучателя в фокальной плоскости объектива со скоростью VLAZER, которая определяется выражением:
 ,
,
где α0 – угол между оптической осью измерителя и направлением движения транспортного потока,
V- скорость цели,
f – фокусное расстояние объектива,
Р - ширина контролируемой многополосной дороги.
Измеритель может содержать встроенные датчики положения измерителя в пространстве на основе полупроводниковых акселерометров и гироскопов, выполненные с возможностью передачи данных о колебаниях измерителя на блок управления положением луча.
Измеритель может быть выполнен с возможностью автоматического перемещения лазерного луча на ближайший распознанный номерной знак транспортного средства, находящегося в зоне сопровождения, после получения результата измерений скорости предыдущего транспортного средства.
Предпочтительно объектив видеокамеры снабжен системой электронной регулировки фокуса и диафрагмы.
Система электронной регулировки фокуса и диафрагмы предпочтительно выполнена с возможностью работы как в автоматическом режиме по сигналам от блока управления, так и по командам оператора.
Блок памяти предпочтительно содержит съемную карту памяти.
Блок связи предпочтительно снабжен каналами беспроводной связи (GSM, Wi-Fi, Bluetooth, IR) для передачи информации о зафиксированных целях на компьютер или смартфон оператора и/или на центральный сервер для автоматической обработки, а также для беспроводного управления измерителем.
Измеритель может дополнительно содержать встроенный навигационный блок, содержащий спутниковый приемник и электронный компас, и выполненный с возможностью сопровождения каждого транспортного средства информацией о времени фиксации, навигационных координатах и направлении ориентации измерителя.
Измеритель может дополнительно содержать синхронизированный с видеокамерой ИК-прожектор, обеспечивающий возможность проведения измерений и видеозаписи в ночное время.
Инфракрасный прожектор ночной подсветки предпочтительно выполнен с возможностью освещения всей зоны сопровождения, при этом ширина Θ диаграмма направленности должна быть не менее угловой ширины этой зоны и выбирается из условия
 ,
,
где Δ – величина максимального смещения лазерного излучателя от центрального положения в фокальной плоскости объектива,
f- фокусное расстояние объектива.
Измеритель может быть дополнительно снабжен внешней аккумуляторной батареей, обеспечивающей работу измерителя при установке на опору с подключенным ИК-прожектором.
Блок обработки информации предпочтительно выполнен с возможностью обеспечения фотофиксации и видеозаписи транспортных средств по заранее установленному признаку, например, транспортного средства, превышающего заданный порог скорости, или транспортных средств, находящихся в определенном диапазоне расстояний от измерителя, либо всех транспортных средств, либо только того транспортного средства, номерной знак которого попал на прицельную метку дисплея.
Измеритель может дополнительно содержать синтезатор речи, выполненный с возможностью обеспечения заблаговременной трансляции по беспроводному (например, Bluetooth) каналу речевой информации о скорости, распознанном номерном знаке, цвете и других характеристиках приближающегося транспортного средства на наушник оператора.
Программно-аппаратный блок обработки информации предпочтительно содержит аппаратный модуль термостабилизации, содержащий набор боковых радиаторов и переднюю панель, присоединенных к тепловыделяющим элементам электронных блоков с помощью тепловых трубок.
Передняя панель предпочтительно выполнена в виде жесткой основы для крепления и юстировки входящих в измеритель объективов.
Объективы видеокамеры предпочтительно снабжены блендами для защиты от внешних воздействий, закрепленными на передней панели.
Дисплейный модуль блока индикации может содержать защитную крышку для защиты от засветки.
Защитная крышка предпочтительно содержит конструктивный элемент для оперативной установки малогабаритного планшетного компьютера или смартфона.
Измеритель может быть снабжен съемной рукояткой, содержащей автономный источник питания, а также кнопки управления работой измерителя.
Измеритель может быть дополнительно снабжен опорным блоком для размещения на переносной складной опоре.
Опорный блок предпочтительно выполнен с возможностью закрепления на нем дополнительных аксессуаров, в частности, ИК-прожектора, козырька, и/или аккумулятора.
Преимущества заявленного измерителя относительно известных приборов из уровня техники заключаются в следующем:
• Предлагаемый лазерный измеритель скорости, в отличие от прототипа, оснащен блоком обработки информации, который одновременно c формированием результатов измерений обеспечивает распознавание номерных знаков и определение их экранных координат.
• Измерительный узел предлагаемого измерителя содержит электронно-механический блок управления положением источника лазерного излучения (а, следовательно, и положением лазерного луча), выполненный с возможностью поиска номерного знака в зоне сопровождения и автоматического удержания луча на номерном знаке ТС в течение времени, необходимого для проведения измерений.
• По окончании измерений скорости одного транспортного средства предлагаемый измеритель автоматически перемещает лазерный луч на ближайший распознанный ГРЗ другого транспортного средства, и начинает новый цикл измерения, что обеспечивает возможность работы измерителя в многоцелевом режиме для последовательного контроля всех целей, обнаруженных в зоне сопровождения.
• Обеспечиваемая предлагаемым измерителем возможность слежения за ГРЗ ТС, находящегося в зоне сопровождения, и автоматического удержания на нем прицельной метки дает возможность проводить измерения под углом вплоть до 10-12 градусов к направлению движения транспортного потока, что в свою очередь, влечет за собой возможность контроля многополосных дорог.
• Измеритель обеспечивает распознавание ГРЗ всех транспортных средств, попавших в поле зрения видеокамеры, в том числе и тех, которые не попали в луч лазера. В результате устройство обеспечивает возможность не только выявления и идентификации нарушителей ПДД, но и позволяет обнаруживать в проходящем транспортном потоке те транспортные средства, которые по тем или иным причинам находятся в розыске, и данные о которых хранятся в розыскных базах.
• Измеритель обеспечивает точную привязку результатов измерения параметров движения конкретного ТС и результатов распознавания его ГРЗ, что позволяет обеспечить безошибочное и эффективное выявление нарушителя. Это обеспечивается совмещением ГРЗ ТС с электронным прицелом, сформированном на дисплее устройства. В памяти устройства сохраняются как видеоданные, так и результаты измерения дальности, скорости, времени и координат. В результате заявленное устройство обеспечивает автоматическую идентификацию ТС, скорость которого измерена. Возможность автоматического распознавания ГРЗ снимает необходимость в остановке ТС-нарушителя, что также снижает требования к предельной дальности работы измерителя.
• В измерителе установлен встроенный набор устройств для беспроводной связи (GSM-модем, Wi-Fi, Bluetooth), что обеспечивает возможность передачи данных о нарушителе на центральный сервер, где происходит формирование официальных материалов о нарушении. Кроме того, видеоизображение ТС с наложенными на него данными о дальности, скорости и ГРЗ транслируется на встроенный в измеритель дисплей, а также может передаваться по беспроводным каналам на удаленный компьютер или смартфон. Эти возможности упрощают процесс настройки и прицеливания, поскольку позволяют оператору использовать дисплей большего формата.
• Для автономной работы измеритель выполнен в виде комбинации видеокамеры, лазерного измерительного блока и программно-аппаратного блока обработки информации, которые в сочетании с высокоэффективной системой терморегуляции обеспечивают минимальное потребление энергии. Аккумуляторный блок, установленный в съемной рукоятке измерителя, обеспечивает функционирование устройства в ручном режиме работы (с руки). Для стационарного использования измерителя (с треноги) используется внешний аккумулятор.
Технический результат заключается в повышении эффективности обнаружения, фотофиксации, идентификации транспортных средств на многополосных дорогах, повышении точности определения скорости и дальности до ТС при одновременном сокращении времени измерения, а также в упрощении прицеливания за счет распознавания ГРЗ в сочетании с автоматическим наведением лазерного луча на ГРЗ, а также за счет многоцелевого режима, в котором обеспечивается автоматический контроль всех обнаруженных ТС.
Краткое описание чертежей
Сущность изобретения поясняется Фиг. 1—7.
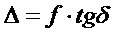
На Фиг.1 представлена общая блок-схема заявляемого измерителя.
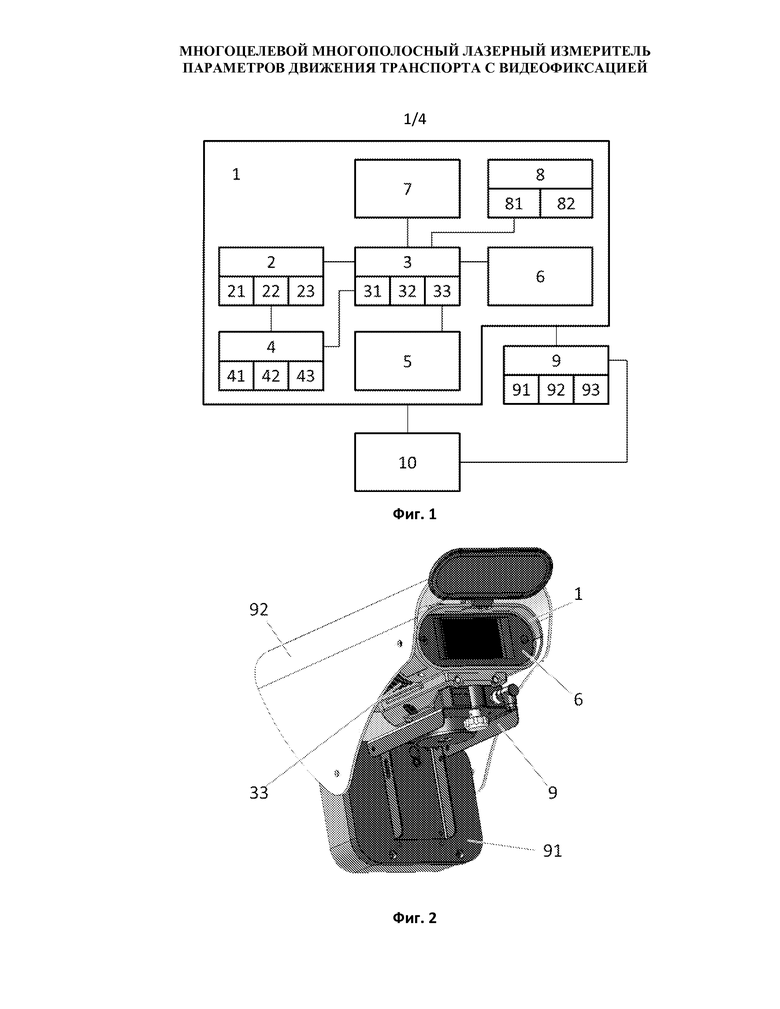
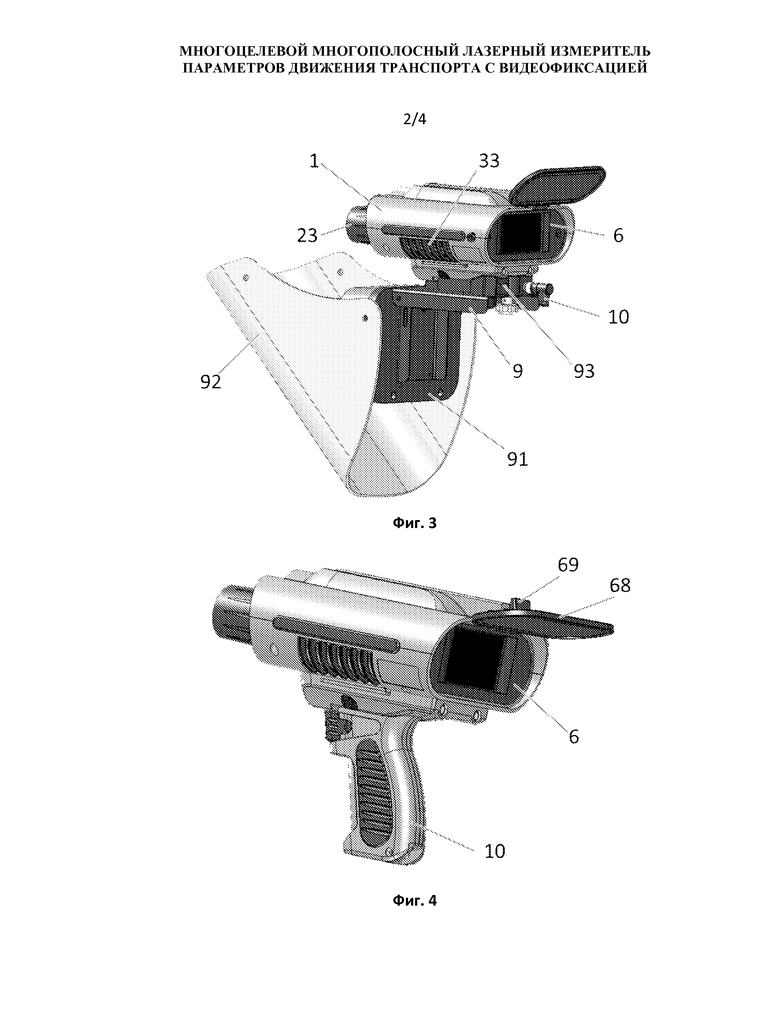
На Фиг.2-4 показана общая конструкция измерителя.
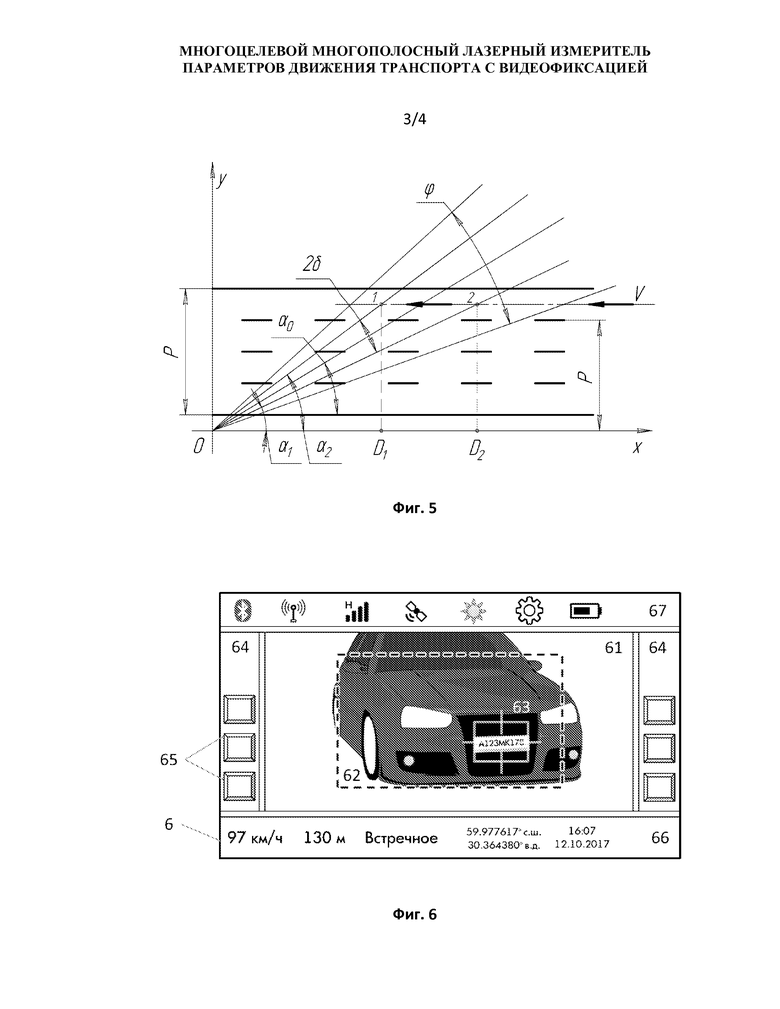
На Фиг.5 показана схема размещения измерителя на дороге.
На Фиг.6 показан интерфейс измерителя, отображаемый на дисплейном модуле.
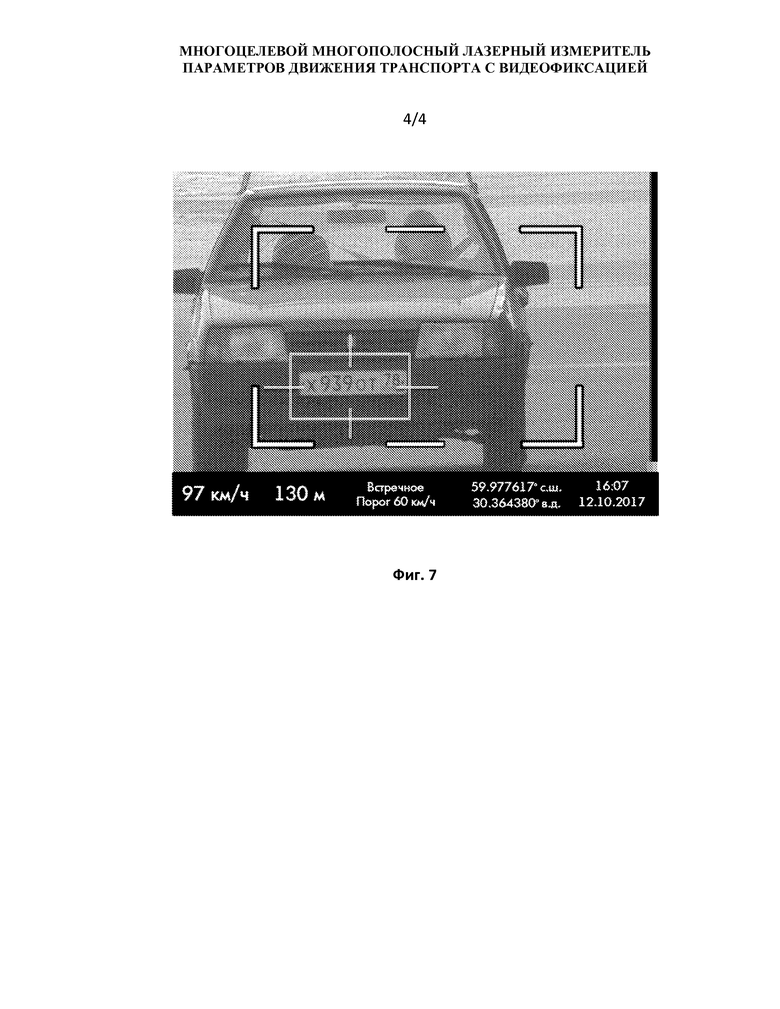
На Фиг.7 приведен пример зафиксированного нарушения.
Осуществление изобретения
На общей блок-схеме заявляемого измерителя, приведенной на Фиг.1, приняты следующие обозначения: 1 - основной измерительный блок, 2 - оптический блок, 3 - программно-аппаратный блок обработки информации, 4 - электронно-механический блок управления положением лазерного излучателя, 5 - блок памяти, 6 - блок индикации, 7 - блок беспроводной связи, 8 - навигационный блок, 9 - опорный блок, 10 - блок питания.
Измеритель в общем случае состоит из основного измерительного блока 1, в который входит оптический блок 2, программно-аппаратный блок 3 обработки информации, электронно-механический блок 4 управления положением лазерного излучателя, и блок 6 индикации.
Оптический блок 2 в свою очередь содержит оптические элементы конструкции (объективы), а также лазерный приемно-передающий модуль 21 и электронный модуль видеокамеры 22, который формирует изображение и управляет электромоторами для регулировки фокуса и диафрагмы. Все оптические элементы измерителя установлены на переднюю панель 23 измерителя. Передняя панель 23 обеспечивает жесткую фиксацию и юстировку объективов, она выполнена из теплопроводящего материала (например, из сплава алюминия) и обеспечивает теплоотвод от расположенного внутри корпуса тепловыделяющего программно-аппаратного блока 3 обработки информации.
Программно-аппаратный блок 3 обработки информации содержит программно-аппаратный измерительный модуль 31, программно-аппаратный модуль 32 распознавания ГРЗ, выполненный с возможностью вычисления экранных координат ГРЗ, и аппаратный модуль 33 термостабилизации, представляющий собой набор радиаторов, присоединенных к тепловыделяющим элементам электронных блоков с помощью тепловых трубок, а также включающий переднюю панель 23. К программно-аппаратному блоку 3 обработки информации подключен необходимый для обеспечения работы измерителя блок 5 памяти, блок 7 беспроводной связи и навигационный блок 8, в котором помимо спутникового приемника 81 для определения координат имеется электронный компас 82 для определения ориентации измерителя.
Электронно-механический блок 4 управления положением лазерного излучателя содержит датчики 41 на эффекте Холла (либо оптические, индуктивные, емкостные, либо иные датчики) для точного определения текущего положения лазерного излучателя по отношению к оптической оси объектива, датчики 42, выполненные с использованием полупроводниковых акселерометров и гироскопов, для определения положения измерителя в пространстве, исполнительный механизм 43 на базе пьезоэлектрических, шаговых, бесколлекторных или иных моторов или актуаторов, который перемещает лазерный излучатель по командам от модуля 44 управления, и электронный модуль 44 управления для выработки команд управления исполнительным механизмом 43 по информации от датчиков 41 и 42, а также для вычисления положения прицельного маркера на экране, которое соответствует текущим координатам лазерного луча.
Для установки на стационарную опору или фотоштатив измеритель оснащен опорным блоком 9, на котором помимо основного измерительного блока 1 установлен инфракрасный прожектор ночной подсветки и защитный козырек 92, также на опорном блоке 9 имеются светодиоды 93, отображающие состояние измерителя. Питание измерителя производится от блока 10 питания, который в одном из вариантов исполнения содержит аккумулятор, встроенный в съемную рукоятку, либо представляет собой внешний аккумулятор, подключаемый к опорному блоку 9, либо выполнен в виде сетевого источника питания, подключаемого к опорному блоку 9.
На Фиг. 2-3 показана общая конструкция измерителя, содержащая основной измерительный блок 1 с радиаторными элементами модуля 33 термостабилизации, передней панелью 23, блоком 6 индикации и светодиодными индикаторами 93 состояния, а также блок 91 ночной подсветки, установленный на опорный блок 9, к которому подключен аккумуляторный блок 10 питания. Основной измерительный блок 1 защищен козырьком 92, который закреплен на опорном блоке 9 с дополнительной фиксацией на измерительном блоке 1.
На Фиг.4 показана общая конструкция измерителя, подключенного к блоку питания в виде рукоятки с встроенным аккумулятором, что обеспечивает возможность автономной работы с руки. Козырек и опорный модуль на рисунке не показаны. Дисплей блока 6 индикации защищен поворотной крышкой 68, обеспечивающей защиту экрана от прямой солнечной засветки. На крышке 68 имеется конструктивный элемент 69 для крепления смартфона.
На Фиг.5 показана схема размещения измерителя на дороге, отмечено положение зоны контроля видеокамеры, зона сопровождения, а также положение лазерного луча. Показаны элементы, необходимые для расчета оптимального положения измерителя. В частности, на схеме Фиг.5 обозначено:
О - точка начала координат, совпадает с точкой установки измерителя, ось абсцисс направлена вдоль дороги,
α - угол между направлением движения транспортного потока и лазерным лучом,
Р – расстояние от точки установки измерителя до середины проезжей части дальней контролируемой полосы. По соображениям безопасности опора измерителя (или оператор) обычно размещается на расстоянии 1,5-2 м от края проезжей части, что ориентировочно соответствует половине ширины одной полосы движения. Учитывая этот факт, можно считать величину Р приближенно равной ширине контролируемой дороги.
D1 и D2 – координаты проекции цели на ось Х на въезде и выезде из зоны сопровождения соответственно.
Точки, обозначенные «1» и «2» указывают на границы зоны сопровождения, соответствующие четвертой полосе движения.
2δ - угловая ширина зоны сопровождения,
V- скорость цели,
φ – угловая ширина поля зрения телекамеры, в варианте реализации порядка 5-6 градусов.
На Фиг.6 показан интерфейс измерителя, отображаемый на дисплее блока 6 индикации. На нем имеется зона 61 видеоконтроля с прицельной рамкой 62, размеры которой соответствуют зоне сопровождения, и маркер 63, координаты которого на экране соответствуют текущему положению лазерного луча. На дисплее имеются также зона 64 управления, содержащая экранные кнопки 65, информационная зона 66 с результатами измерений и статусная зона 67 с индикацией состояния батареи, статуса систем связи и т.п.
На Фиг.7 приведен пример зафиксированного изображения.
Измеритель работает следующим образом.
Измеритель устанавливается на обочине дороги так, как показано на фиг.5. Изображение, полученное с видеокамеры 22 (фиг.1), транслируется на соответствующие входы программно-аппаратного блока 3 обработки информации. Программно-аппаратный блок 3 обработки информации производит обработку полученного видеопотока, в результате которой осуществляется:
- распознавание ГРЗ каждого ТС в зоне контроля,
- определение экранных координат изображений ГРЗ,
- анализ движения ГРЗ ТС в кадре для вычисления траектории движения каждого ТС в зоне контроля по оптическим данным.
Одновременно с этим лазерный приемо-передающий модуль 21 формирует короткие импульсы лазерного источника, излучает их, принимает отраженный от цели сигнал и передает его на обработку также в программно-аппаратный блок 3 обработки информации. Результатом этой обработки являются значения параметров движения ТС, попавшего в лазерный луч.
Одновременно с этим блок 4 управления положением лазерного излучателя получает и обрабатывает информацию, полученную от датчиков 41 положения излучателя, а также от датчиков 42 на основе акселерометров и гироскопов, определяющих положение измерителя в пространстве. Эта обработка производится в электронном модуле 44 управления. Команды, выработанные в ходе этой обработки, поступают на исполнительный механизм 43 для управления положением лазерного излучателя.
Результат измерения дальности и скорости формируется в программно-аппаратном блоке 3 только в том случае, если измеряемое ТС попало в лазерный луч и находилось в нем не менее времени, необходимого измерителю для получения достоверного результата, например, в варианте реализации, порядка 0,1-0,2 сек. Известно, что точность измерения параметров движения ТС существенным образом зависит от того, какие именно элементы кузова послужили отражателем в данном цикле измерений. В частности, известно, что сигнал, отраженный непосредственно от номерного знака, обладает существенно большей амплитудой и стабильностью, чем сигнал, отраженный от других элементов конструкции ТС, что связано с наличием ретро-рефлекторов в покрытии номерного знака. В результате измерения, проведенные по отражению от ГРЗ, обеспечивают более высокую точность, связанную с высокой стабильностью задержки отраженного сигнала и увеличенным соотношением сигнал/шум и, следовательно, могут быть выполнены за более короткое время.
Для обеспечения измерений по отражению от ГРЗ измеритель оснащен электронно-механическим блоком 4 управления положением лазерного излучателя, который обеспечивает сопровождение номерного знака лазерным лучом. По датчикам 41 положения лазерного излучателя модуль 44 управления определяет его положение относительно оптической оси объектива, и, с учетом данных от датчиков 42 положения измерителя в пространстве, вычисляет экранные координаты той точки на экране, в которую должна быть установлена прицельная метка, соответствующая положению лазерного луча в пространстве.
С другой стороны, программно-аппаратный блок 3 обработки данных выдает информацию об экранных координатах ГРЗ на изображении ТС. По полученным данным модуль 44 управления формирует команды на исполнительный механизм 43, который перемещает лазерный излучатель так, чтобы лазерный луч был направлен в ГРЗ ТС и отслеживал его все то время, пока он находится в зоне сопровождения. При вычислении координат точки, в которую должен быть направлен лазерный луч в ходе сопровождения ГРЗ, используется информация о траектории движения, полученная при распознавании ГРЗ в программно-аппаратном блоке 3 обработки. Имеющиеся в составе электронно-механического блока 4 управления положением лазерного излучателя датчики 42 (акселерометры и гироскопы) позволяют при этом учесть вибрации и колебания измерителя в пространстве. Система охвачена обратной связью, обеспечивающей учет данных о текущем взаимном расположении прицельной метки и изображения ГРЗ при расчете позиции, в которую должен быть перемещен лазерный излучатель.
Перемещение лазерного луча производится в зоне сопровождения (фиг.5), размеры которой определяются величиной допустимого смещения лазерного источника от оптической оси объектива излучателя. Расчеты, связывающие предельно-достижимые контролируемые скорости с параметрами измерителя и с условиями измерений, иллюстрируются фиг.5. На схеме введена условная система координат, в которой точка начала координат совпадает с точкой установки измерителя, ось абсцисс направлена вдоль, а ось ординат - поперек дороги.
Угловая ширина зоны сопровождения определится, как
 (1),
(1),
а угол между направлением движения транспортного потока и лазерным лучом
 (2),
(2),
Тогда расстояние, пройденное ТС в зоне сопровождения, составит
 (3),
(3),
где D1 и D2 – координаты проекции цели на ось Х на въезде и выезде из зоны сопровождения соответственно,
Р – расстояние от точки установки измерителя до середины проезжей части дальней контролируемой полосы. По соображениям безопасности опора измерителя (или оператор) обычно размещается на расстоянии 1,5-2 м от края проезжей части, что ориентировочно соответствует половине ширины одной полосы движения. Учитывая этот факт, величину Р полагаем равной ширине контролируемой дороги.
С другой стороны,
 , (4)
, (4)
где V- скорость ТС,
t- время нахождения ТС в зоне сопровождения или, что то же время, в течение которого измеритель производит измерение скорости.
После преобразований выражения (3) получим
 (5).
(5).
Учитывая, что углы в данном выражении составляют единицы градусов, перейдем к приближенным выражениям. После преобразования выражения (5) с учетом (4) получим
 (6).
(6).
Данное выражение связывает параметры движения цели и условия измерений, при которых эти параметры могут быть определены.
Учитывая, что величина смещения Δ лазерного излучателя от центрального положения (оптической оси объектива) связана с фокусным расстоянием объектива выражением:
 (7),
(7),
где f – фокусное расстояние объектива.
Смещение лазерного излучателя от центрального положения, которое необходимо обеспечить в измерителе для отслеживания цели, определится выражением
(8).
Отсюда скорость перемещения лазерного излучателя в фокальной плоскости объектива
 (9).
(9).
Зная величину смещения лазерного излучателя в фокальной плоскости объектива, определим минимально допустимую ширину диаграммы направленности прожектора инфракрасной подсветки Θ, который должен освещать как минимум всю зону сопровождения.
(10).
Полученные выражения (6)-(10) позволяют провести оценку параметров движения цели и их связь с условиями измерений и характеристиками измерителя. Эти выражения позволяют оценить ограничения и выработать технические требования к измерителю, которые обеспечивают возможность контроля транспортных потоков в конкретных дорожных условиях применения. В частности, при Р=15м (что соответствует 4-хполосной дороге) и предельной скорости 250 км/час, измеритель, обеспечивающий быстродействие 0,1-0,2 сек может быть установлен на обочине дороги под углом порядка 15 градусов, что позволяет контролировать цели на 4-ой полосе движения на средних расстояниях порядка 50-70 м. Для контроля сверхскоростных целей на всех полосах дороги (включая первую полосу) при указанных выше условиях измеритель должен размещаться под углом порядка 10 градусов. Увеличение в таком случае средней дальности до целей на 4 полосе до величин порядка 85 м не является критическим, поскольку распознавание номерных знаков на таких расстояниях является в настоящее время решенной технической задачей. Важной характеристикой измерителя является величина скорости смещения лазерного излучателя в фокальной плоскости, поскольку именно это значение накладывает особые требования на конструкцию исполнительного механизма. В варианте реализации выражение (9) дает предельное значение этой скорости порядка 20 мм/сек, что реализуется различными известными на сегодня решениями мехатроники. Величина смещения лазерного излучателя, при которой оптические параметры луча не деградируют, в варианте конкретной реализации составляет ±2 мм. Из этого следует, что инфракрасный прожектор ночной подсветки должен обеспечивать освещение зоны сопровождения с угловой шириной порядка 3-4 градусов, что также обеспечивается современным уровнем техники. Общий размер зоны перемещения лазерного излучателя в фокальной плоскости объектива составляет 4 мм, что по крайней мере в 15-20 раз превышает размеры его светящейся точки и, таким образом, обеспечивает 15-20 - кратное увеличение области прицеливания, в которой должен находиться ГРЗ ТС для того, чтобы измерения были успешными.
К полученным таким образом результатам измерения добавляется информация от навигационного блока 8 о текущих координатах, времени и ориентации измерителя, эти данные отображаются на дисплее блока 6 индикации, сохраняются в блоке 5 памяти и могут быть переданы на Центральный сервер с помощью блока 7 беспроводной связи для последующей обработки.
По окончании сопровождения распознанного ГРЗ и завершении цикла измерений данного ТС измеритель автоматически перемещает лазерный луч на следующее ТС, ГРЗ которого находится в зоне сопровождения, что позволяет обеспечить многоцелевой режим измерения и ежесекундно производить измерения параметров движения нескольких ТС (в варианте реализации - до 5-10 ТС в секунду).
Наличие сведений о текущих координатах и ориентации измерителя, а также значение точного времени и дальности до измеренного ТС позволяют проводить измерения не только мгновенной скорости в зоне контроля одного измерителя, но и определить среднюю скорость данного ТС на участке дороги между двумя измерителями. В таком случае длина пройденного ТС пути определяется по расстоянию между измерителями, измеренному вдоль дороги, с учетом положения данного ТС по отношению к каждому из измерителей в моменты отсчета, а время прохождения этого участка определяется с высокой точностью по данным системы спутниковой навигации каждого из измерителей. Наличие блока беспроводной связи позволяет измерителям обмениваться информацией с целью формирования данных о средней скорости данного ТС.
Дополнительной возможностью является способность измерителя обнаруживать и отслеживать номерной знак даже в том случае, когда модуль распознавания не смог его распознать и определить его экранные координаты. Измеритель может в этом случае перейти в режим сканирования и, последовательно просматривая зону сопровождения, обнаружить в ней область с экстремально-высоким уровнем отражения. Эта область вероятнее всего окажется тем номерным знаком, который по каким-либо причинам оказался нераспознанным. Таким образом, точные измерения с отслеживанием номерного знака могут быть обеспечены и в тех случаях, когда распознавание затруднено. В этом случае, однако, может замедлиться поиск новых целей и многоцелевой режим окажется менее эффективным.
В качестве основного режима работы измерителя предлагается использовать установку его на фотоштативе или на стационарной опоре на обочине дороги, что обеспечивает более высокую стабильность пространственного положения измерителя. В этом случае измеритель устанавливается на опорный блок 9, на котором закреплен синхронный ИК-прожектор 91 для обеспечения работы в темноте и козырек 92, защищающий измеритель от перегрева в условиях жаркого климата, и направляется на проходящий по дороге транспортный поток. Для подключения сетевого питания или питания от внешнего аккумулятора опорный блок 9 оснащен соответствующим разъемом. Надежное крепление измерителя на опорном блоке 9 обеспечивается имеющимся в его конструкции фиксатором. Запуск измерений и управление измерителем осуществляется в таком случае с помощью экранных кнопок либо от внешнего управляющего устройства, например, дистанционного пульта, смартфона, портативного компьютера, либо удаленно, от центрального сервера по каналам связи. Измеритель в таком случае автоматически обнаруживает цели в зоне сопровождения, обеспечивает измерение параметров их движения, а также сохранение и передачу данных об этих целях.
В измерителе также предусмотрен режим работы с руки. В таком случае питание на него поступает от встроенного в съемную рукоятку аккумулятора, а запуск измерений осуществляется курком на рукоятке. Задачей оператора в таком случае является только удержание измерителя в направлении транспортного потока и запуск измерений. Поиск цели, прицеливание, измерение и переключение между целями будут в этом случае также проведены автоматически.
Тепло, выделяемое внутренними электронными блоками измерителя, выводится из корпуса и рассеивается с помощью модуля 33 термостабилизации, содержащего боковые радиаторы и переднюю панель 23, которые внутри прибора посредством тепловых трубок подсоединены к тепловыделяющим элементам внутренних электронных блоков измерителя. Площадь радиаторов выбрана таким образом, чтобы тепловой режим работы внутренних электронных блоков измерителя не был нарушен.
И в ручном режиме, и в режиме работы с опоры измеритель производит сохранение всех полученных данных в блоке 5 памяти. Имеющаяся в его составе съемная SD-карта позволяет оперативно снимать информацию с измерителя даже в случае его неисправности, полного разряда аккумулятора и т.п.
Информация, полученная измерителем в процессе работы, также выводится на экран дисплейного модуля. Экран имеет несколько рабочих зон, как показано на фиг.6, упрощающих работу с измерителем и делающих ее интуитивно-понятной. Интерфейс измерителя отображается на дисплее модуля 6 индикации. При попадании ТС в зону 61 видеоконтроля начинается распознавание ГРЗ и расчет траектории его движения. При попадании ГРЗ ТС в прицельную рамку 62, размеры которой соответствуют зоне сопровождения, активируется режим автоматического сопровождения, а маркер 63, соответствующий текущему положению лазерного луча, перемещается на тот ТС, скорость которого измеряется. Зона 64 управления, содержащая экранные кнопки 65, позволяет оператору вручную управлять измерителем, а в информационной зоне 66 выводятся результаты измерений и информация о настройках и установках измерителя. В статусной зоне 67 (обычно верхняя часть дисплея) индицируется состояние батареи, статус систем связи, навигации и т.п.
Наличие в составе измерителя блока 7 беспроводной связи позволяет решить задачу передачи данных на удаленные устройства (смартфон, планшетный компьютер) и на Центральный сервер.
Кроме того, наличие канала Bluetooth в сочетании с синтезатором речи позволяет формировать и передавать на наушник оператора голосовую информацию о скорости, дальности, номерном знаке, цвете и других характеристиках ТС, что позволяет оператору заблаговременно реагировать на приближение данного ТС.
Технический результат заключается в повышении эффективности обнаружения, фотофиксации, идентификации транспортных средств на многополосных дорогах, повышении точности определения скорости и дальности до ТС при одновременном сокращении времени измерений, а также в упрощении прицеливания.
Изобретение относится к устройствам для измерения параметров движения транспорта, в частности скорости и дальности. Заявленный многоцелевой многополосный лазерный измеритель параметров движения транспорта с видеофиксацией содержит размещенные в корпусе локационный лазерный приемо-передающий модуль, выполненный с возможностью измерения скорости и дальности, видеокамеру, блок индикации с меткой для прицеливания, положение которой соответствует положению лазерного луча в пространстве, блок связи и блок памяти, соединенные с блоком обработки информации. Многоцелевой многополосный лазерный измеритель дополнительно содержит подключенный к лазерному приемо-передающему модулю электронно-механический блок управления положением лазерного луча, выполненный с возможностью поиска номерного знака транспортного средства в зоне сопровождения и автоматического удержания луча на номерном знаке. Причем блок обработки информации содержит программно-аппаратный модуль распознавания номерных знаков, блок индикации содержит дисплейный модуль, отображающий рамку для прицеливания, изображение которой соответствует размерам зоны сопровождения, а прицельная метка выполнена с возможностью автоматического сопровождения цели и перемещения внутри упомянутой рамки. Технический результат - повышение эффективности обнаружения, фотофиксации, идентификации транспортных средств на многополосных дорогах, повышение точности определения скорости и дальности до ТС при одновременном сокращении времени измерений, а также упрощение прицеливания. 26 з.п. ф-лы, 7 ил.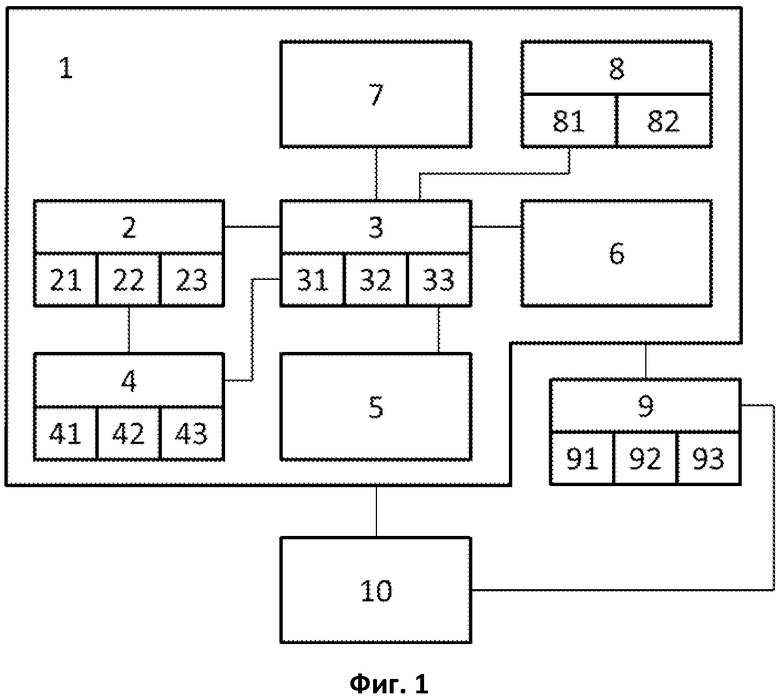
1. Многоцелевой многополосный лазерный измеритель параметров движения транспорта с видеофиксацией, содержащий размещенные в корпусе локационный лазерный приемо-передающий модуль, выполненный с возможностью измерения скорости и дальности, видеокамеру, блок индикации с меткой для прицеливания, положение которой соответствует положению лазерного луча в пространстве, блок связи и блок памяти, соединенные с блоком обработки информации, отличающийся тем, что он дополнительно содержит подключенный к лазерному приемо-передающему модулю электронно-механический блок управления положением лазерного луча, выполненный с возможностью поиска номерного знака транспортного средства в зоне сопровождения и автоматического удержания луча на номерном знаке, причем блок обработки информации содержит программно-аппаратный модуль распознавания номерных знаков, блок индикации содержит дисплейный модуль, отображающий рамку для прицеливания, изображение которой соответствует размерам зоны сопровождения, а прицельная метка выполнена с возможностью автоматического сопровождения цели и перемещения внутри упомянутой рамки.
2. Измеритель по п.1, отличающийся тем, что электронно-механический блок управления положением лазерного луча выполнен с возможностью наведения лазерного луча на номерной знак транспортного средства с использованием экранных координат его изображения, полученных в ходе распознавания номерного знака программно-аппаратным блоком распознавания.
3. Измеритель по п.1, отличающийся тем, что электронно-механический блок управления положением лазерного луча содержит электромеханический исполнительный механизм на основе сервоприводов с электромоторами и/или актуаторами.
4. Измеритель по п.1, отличающийся тем, что электронно-механический блок управления положением лазерного луча содержит датчик положения лазера, выполненный на основе датчиков Холла, индуктивных, емкостных и/или оптических датчиков.
5. Измеритель по п.1, отличающийся тем, что электронно-механический блок управления положением лазерного луча содержит цепь обратной связи, связывающей датчики положения лазера с электронным модулем управления моторами, обеспечивающими перемещение лазерного луча для его наведения на номерной знак транспортного средства.
6. Измеритель по п.1, отличающийся тем, что для контроля многополосной дороги электронно-механический блок управления положением лазерного луча выполнен с возможностью смещения лазерного луча на величину Δ от центрального положения
где α₀ – угол между оптической осью измерителя и направлением движения транспортного потока,
V- скорость цели,
f – фокусное расстояние объектива,
t - время, в течение которого контролируемое транспортное средство находится в зоне сопровождения измерителя,
Р - ширина контролируемой многополосной дороги.
7. Измеритель по п.1, отличающийся тем, что для отслеживания номерных знаков в зоне сопровождения электронно-механический блок управления положением лазерного луча выполнен с возможностью перемещения лазерного излучателя в фокальной плоскости объектива со скоростью VLAZER, которая определяется выражением:
где α₀ – угол между оптической осью измерителя и направлением движения транспортного потока,
V- скорость цели,
f – фокусное расстояние объектива,
Р - ширина контролируемой многополосной дороги.
8. Измеритель по п.1, отличающийся тем, что он содержит встроенные датчики положения измерителя в пространстве на основе полупроводниковых акселерометров и гироскопов, выполненные с возможностью передачи данных о колебаниях измерителя на блок управления положением луча.
9. Измеритель по п.1, отличающийся тем, что он выполнен с возможностью автоматического перемещения лазерного луча на ближайший распознанный номерной знак транспортного средства, находящегося в зоне сопровождения, после получения результата измерений скорости предыдущего транспортного средства.
10. Измеритель по п.1, отличающийся тем, что объектив видеокамеры снабжен системой электронной регулировки фокуса и диафрагмы.
11. Измеритель по п.10, отличающийся тем, что система электронной регулировки фокуса и диафрагмы выполнена с возможностью работы как в автоматическом режиме по сигналам от блока управления, так и по командам оператора.
12. Измеритель по п.1, отличающийся тем, что блок памяти содержит съемную карту памяти.
13. Измеритель по п.1, отличающийся тем, что блок связи снабжен каналами беспроводной связи (GSM, Wi-Fi, Bluetooth, IR) для передачи информации о зафиксированных целях на компьютер или смартфон оператора и/или на центральный сервер для автоматической обработки, а также для беспроводного управления измерителем.
14. Измеритель по п.1, отличающийся тем, что он дополнительно содержит встроенный навигационный блок, содержащий спутниковый приемник и электронный компас и выполненный с возможностью сопровождения каждого транспортного средства информацией о времени фиксации, навигационных координатах и направлении ориентации измерителя.
15. Измеритель по п.1, отличающийся тем, что он дополнительно содержит синхронизированный с видеокамерой ИК-прожектор, обеспечивающий возможность проведения измерений и видеозаписи в ночное время.
16. Измеритель по п.15, отличающийся тем, что инфракрасный прожектор ночной подсветки выполнен с возможностью освещения всей зоны сопровождения, при этом ширина ϴ диаграммы направленности должна быть не менее угловой ширины этой зоны и выбирается из условия
 ,
,
где Δ – величина максимального смещения лазерного излучателя от центрального положения в фокальной плоскости объектива,
f- фокусное расстояние объектива.
17. Измеритель по п.16, отличающийся тем, что он дополнительно снабжен внешней аккумуляторной батареей, обеспечивающей работу измерителя при установке на опору с подключенным ИК-прожектором.
18. Измеритель по п.1, отличающийся тем, что блок обработки информации выполнен с возможностью обеспечения фотофиксации и видеозаписи транспортных средств по заранее установленному признаку, например транспортного средства, превышающего заданный порог скорости, или транспортных средств, находящихся в определенном диапазоне расстояний от измерителя, либо всех транспортных средств, либо только того транспортного средства, номерной знак которого попал на прицельную метку дисплея.
19. Измеритель по п.1, отличающийся тем, что он дополнительно содержит синтезатор речи, выполненный с возможностью обеспечения заблаговременной трансляции по беспроводному (например, Bluetooth) каналу речевой информации о скорости, распознанном номерном знаке, цвете и других характеристиках приближающегося транспортного средства на наушник оператора.
20. Измеритель по п.1, отличающийся тем, что программно-аппаратный блок обработки информации содержит аппаратный модуль термостабилизации, содержащий набор боковых радиаторов и переднюю панель, присоединенных к тепловыделяющим элементам электронных блоков с помощью тепловых трубок.
21. Измеритель по п.20, отличающийся тем, что передняя панель выполнена в виде жесткой основы для крепления и юстировки входящих в измеритель объективов.
22. Измеритель по п.20, отличающийся тем, что объективы видеокамеры снабжены блендами для защиты от внешних воздействий, закрепленными на передней панели.
23. Измеритель по п.1, отличающийся тем, что дисплейный модуль блока индикации содержит защитную крышку для защиты от засветки.
24. Измеритель по п.23, отличающийся тем, что защитная крышка содержит конструктивный элемент для оперативной установки малогабаритного планшетного компьютера или смартфона.
25. Измеритель по п.1, отличающийся тем, что он снабжен съемной рукояткой, содержащей автономный источник питания, а также кнопки управления работой измерителя.
26. Измеритель по п.1, отличающийся тем, что он дополнительно снабжен опорным блоком для размещения на переносной складной опоре.
27. Измеритель по п.26, отличающийся тем, что опорный блок выполнен с возможностью закрепления на нем дополнительных аксессуаров, в частности ИК-прожектора, козырька, и/или аккумулятора.
| 0 |
|
SU155517A1 | |
| Гидравлический пресс автоматического действия для штамповки галош и иных изделий | 1948 |
|
SU83644A1 |
| РАДИОЛОКАЦИОННЫЙ ВИДЕОФИКСИРУЮЩИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ ТРАНСПОРТА И СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛИ-НАРУШИТЕЛЯ | 2010 |
|
RU2472227C2 |
| GB 2055469 A, 04.03.1981 | |||
| US 6266627 B1, 24.07.2001 | |||
| CN 102722985 A, 10.10.2012. | |||

