Изобретение относится к области контрольно-измерительной техники и может быть использовано для диагностирования обсадных колон и насосно-компрессорных стальных труб добывающих скважин, а также скважин объектов хранения жидких и газообразных веществ, в том числе, нефти, природного газа, воды, этилена и т.п., при их геофизическом обследовании как в процессе эксплуатации, сервисных и ремонтных работ, так и при приемке после строительства и ремонта.
Известна Акустическая телевизионная система высокого разрешения (HRAT) [1] компании Robertson Geo, предназначенная для диагностического обследования эксплуатационных колонн и насосно-компрессорных труб в процессе каротажа скважин. В системе используется неподвижный акустический пьезоэлектрический преобразователь и вращающееся акустическое зеркало, которые осуществляют сканирование стенок труб скважины при помощи сфокусированного ультразвукового луча. Амплитуда и время пробега отраженного акустического сигнала регистрируются в виде отдельных изображений на каротажной диаграмме и служат для оценки толщины трубы и выявления локальных дефектов, в том числе трещин и «разрывов».
Недостатком данного устройства является то, что его работа осуществляется в иммерсионной жидкости без содержания газа, чего в полости действующей скважины в большинстве случае достичь невозможно.
Известны внутритрубные инспекционные снаряды [2] на основе электромагнитно-акустических преобразователей (ЭМАП) для диагностического обследования магистральных трубопроводов. Эти устройства применяются для выявления и измерения параметров коррозионных трещин стенки трубопроводов, а также нарушения их изоляционного покрытия.
Недостатком таких приборов является то, что они не предназначены для регистрации локальных коррозионных дефектов типа «потеря металла» из-за использования ультразвуковой волны, направленной вдоль или под углом к внутренней поверхности трубопровода. Кроме того, они имеют значительные габаритные размеры и массу, что связано с применением мощных и тяжелых постоянных магнитов, формирующих индукцию в области расположения электромагнитно-акустического преобразователя порядка 30 кА/м. Этот фактор препятствует созданию приборов для диагностирования труб номинальным диаметром менее 320 мм, в том числе обсадных колонн и насосно-компрессорных труб скважин, а мощность устройства намагничивания такова, что из-за прилипания постоянного магнита к стенкам трубы спуск такого устройства в скважину при проведении стандартной процедуры геофизического исследования затруднен или невозможен.
Наиболее близким по технической сущности к заявленному изобретению является сканирующий магнитный интроскоп [3] для дефектоскопического контроля стальных эксплуатационных колонн скважин, состоящий из скважинного модуля, включающего в себя бортовой контроллер, блока наземной электроники, содержащего источник питания, наземный контроллер и систему определения глубины скважинного модуля, и геофизического кабеля, подключенные таким образом, что скважинный модуль подсоединен посредством геофизического кабеля к блоку наземной электроники, при этом выход источника питания подсоединен к первому входу бортового контроллера, первый выход которого связан с первым входом наземного контроллера, подключенного вторым входом к выходу системы определения глубины скважинного модуля, а выходом к компьютеру.
Недостатком данного сканирующего магнитного интроскопа является ограниченный диапазон функциональных возможностей, обусловленный невозможностью измерения остаточной толщины стенки трубы, что препятствует использованию общепринятых процедур оценки срока безопасной эксплуатации (ресурса) обсадных колонн и насосно-компрессорных труб по результатам диагностического обследования на основе анализа остаточной толщины стенки трубы и скорости коррозии, низкой достоверностью определения местоположения дефектов на стенке (внешний/внутренний), а также невозможностью регистрации факта сквозного повреждения стенки трубы. Кроме того, из-за использования в качестве магниточувствительных элементов датчиков Холла, он имеет низкую максимально рабочую температуру (менее 100 градусов по Цельсию) и предельно допустимое рабочее давление (не более 300 Атм), что сужает диапазон его использования в горячих и глубоких, более 3000 м, скважинах.
Технической проблемой, решаемой настоящим изобретением, является расширение функционального диапазона устройства за счет использования прямого ультразвукового метода измерения остаточной толщины стенки трубы, реализации возможности определения местоположения на ней дефектов (внешний/внутренний), а также факта её сквозного повреждения.
Техническая проблема в настоящем изобретении решается за счет того, что в предлагаемом электромагнитно-акустическом интроскопе для диагностического обследования обсадных колон и насосно-компрессорных труб скважин, состоящем из скважинного модуля в защитном корпусе, включающего в себя бортовой контроллер, блока наземной электроники, содержащего источник питания, наземный контроллер и систему определения глубины скважинного модуля в защитном корпусе, и геофизического кабеля, в состав скважинного модуля в защитном корпусе введены коммутатор тока подмагничивания, блок формирования сигналов возбуждения, узел мультиплексирования и преобразования отраженного сигнала и N электромагнитно-акустических преобразователей с возможностью их размещения в виде матрицы или строки.
Скважинный модуль в защитном корпусе подсоединен посредством геофизического кабеля к блоку наземной электроники, при этом выход источника питания подсоединен к первому входу бортового контроллера, первый выход которого связан с первым входом наземного контроллера, подключенного вторым входом к выходу системы определения глубины скважинного модуля в защитном корпусе, а выходом к компьютеру.
Каждый из N электромагнитно-акустических преобразователей включает в себя устройство намагничивания, излучатель ультразвуковой волны и регистратор ультразвуковой волны, с возможностью их взаимного расположения таким образом, чтобы направление формируемой и регистрируемой с их использованием ультразвуковой волны было перпендикулярно стенке обсадной колонны или насосно-компрессорной трубы.
N электромагнитно-акустических преобразователей расположены со стороны внутренней поверхности по окружности обсадной колонны или насосно-компрессорной трубы скважины.
N электромагнитно-акустических преобразователей прижимаются к внутренней поверхности колонны или насосно-компрессорной трубы скважины с использованием гибких лыж или с помощью гибких полиуретановых или резиновых манжет, механических пружин.
Второй и третий выходы бортового контроллера соединены со входами, соответственно, коммутатора тока подмагничивания и блока формирования сигналов возбуждения.
Каждый из N выходов коммутатора тока подмагничивания подключен ко входу устройства намагничивания каждого из N электромагнитно-акустических преобразователей.
Каждый из N выходов блока формирования сигналов возбуждения - ко входу излучателя ультразвуковой волны каждого из N электромагнитно-акустических преобразователей.
Выход регистратора ультразвуковой волны каждого из N электромагнитно-акустических преобразователей связан с одним из входов узла мультиплексирования и преобразования отраженного сигнала, выход которого соединен со входом бортового контроллера.
Отличительной особенностью данного изобретения является то, что в состав скважинного модуля в защитном корпусе введены коммутатор тока подмагничивания, блок формирования сигналов возбуждения, узел мультиплексирования и преобразования отраженного сигнала и N электромагнитно-акустических преобразователей, расположенных в виде матрицы или строки со стороны внутренней поверхности обсадной колонны или насосно-компрессорной трубы скважины таким образом, чтобы было обеспечено максимально возможное их прижатие к внутренней поверхности, например, с использованием гибких лыж или с помощью гибких полиуретановых или резиновых манжет, механических пружин, при этом каждый из которых включает в себя устройство намагничивания, излучатель ультразвуковой волны и регистратор ультразвуковой волны, взаимно расположенные таким образом, чтобы направление формируемой и регистрируемой с их использованием ультразвуковой волны было перпендикулярно стенке обсадной колонны или насосно-компрессорной трубы, причем второй и третий выходы бортового контроллера соединены со входами, соответственно, коммутатора тока подмагничивания и блока формирования сигналов возбуждения, каждый из N выходов коммутатора тока подмагничивания подключен ко входу устройства намагничивания каждого из N электромагнитно-акустических преобразователей, а каждый из N выходов блока формирования сигналов возбуждения - ко входу излучателя ультразвуковой волны каждого из N электромагнитно-акустических преобразователей, выход регистратора ультразвуковой волны каждого из N электромагнитно-акустических преобразователей связан с одним из входов узла мультиплексирования и преобразования отраженного сигнала, выход которого соединен со входом бортового контроллера.
Использование электромагнитно-акустических преобразователей, включающих в себя устройство намагничивания, излучатель ультразвуковой волны и регистратор ультразвуковой волны, взаимно расположенные таким образом, чтобы направление формируемой и регистрируемой с их использованием ультразвуковой волны было перпендикулярно стенке объекта контроля, известно в конструкции электромагнитно-акустических толщиномеров [4], предназначенных для ручного точечного измерения толщины изделий из стали и алюминиевых сплавов без применения контактной жидкости. Однако применение N электромагнитно-акустических преобразователей, расположенных в виде матрицы или строки со стороны внутренней поверхности обсадной колонны или насосно-компрессорной трубы скважины таким образом, чтобы было обеспечено максимально возможное их прижатие к внутренней поверхности, например, с использованием гибких лыж или иным способом, например, с помощью гибких полиуретановых либо резиновых манжет, механических пружин, в составе скважинного модуля автору не известно. Такое использование указанных устройств позволяет путем сканирования N электромагнитно-акустических преобразователей визуализировать структуру обсадной колонны или насосно-компрессорной трубы скважины и рассматривать ее не в отдельных точках, а комплексно, оценивая остаточную толщину по всей протяженности и диаметру.
Применение коммутаторов тока, узлов мультиплексирования измерительных сигналов и блоков формирования сигналов различного назначения широко известно при использовании в устройствах автоматизации и современной измерительной технике [5, 6, 7]. Однако, их использование в составе скважинных модулей совместно с матрицами или строками из N электромагнитно-акустических преобразователей для намагничивания, возбуждения и регистрации ультразвуковой волны при сканировании эксплуатационных колонн и насосно-компрессорных труб скважин автору не известно и в литературе не встречалось.
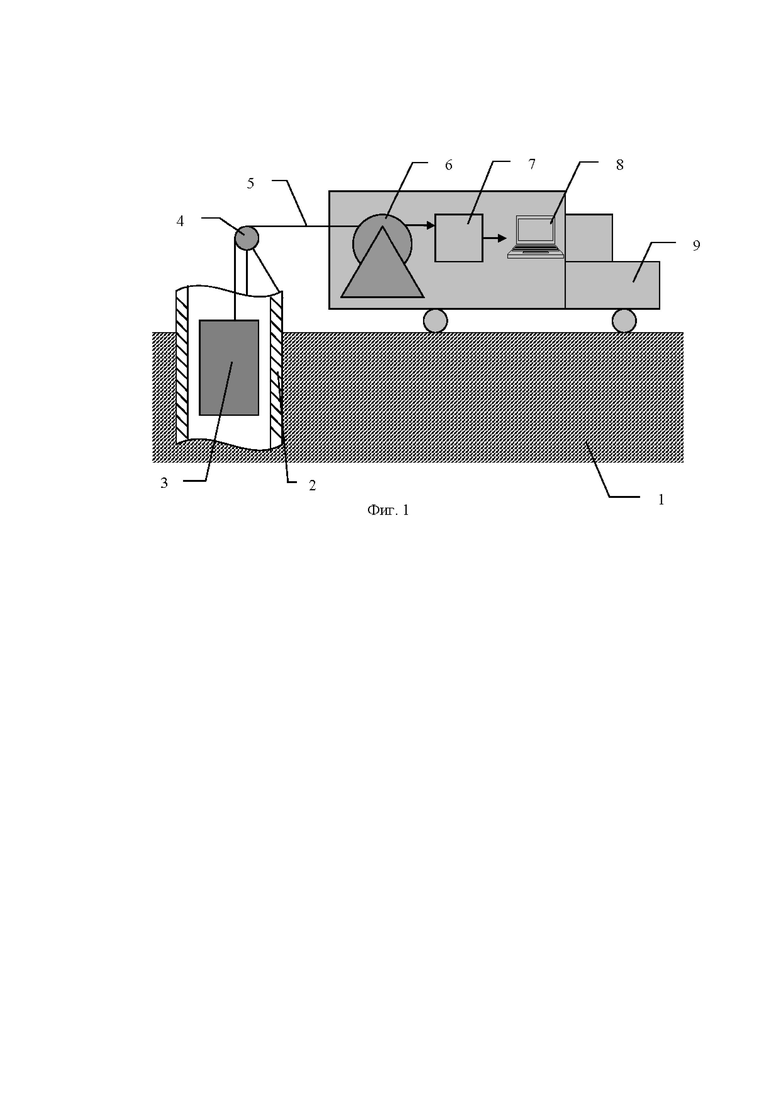
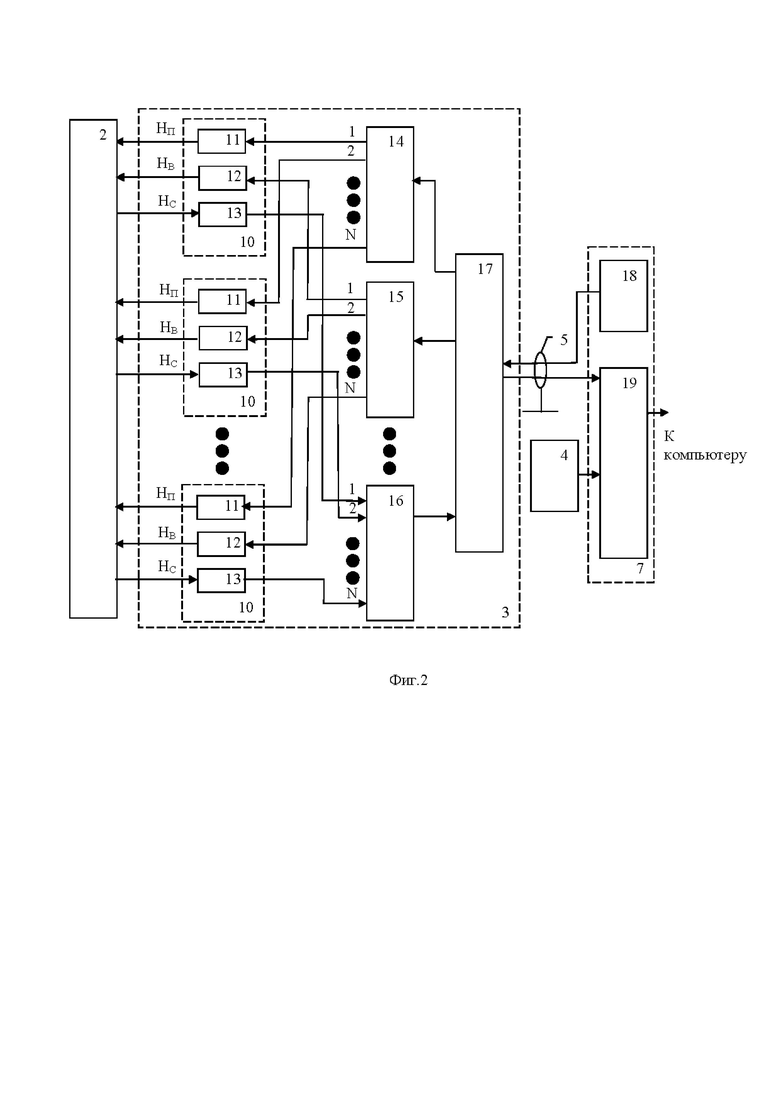
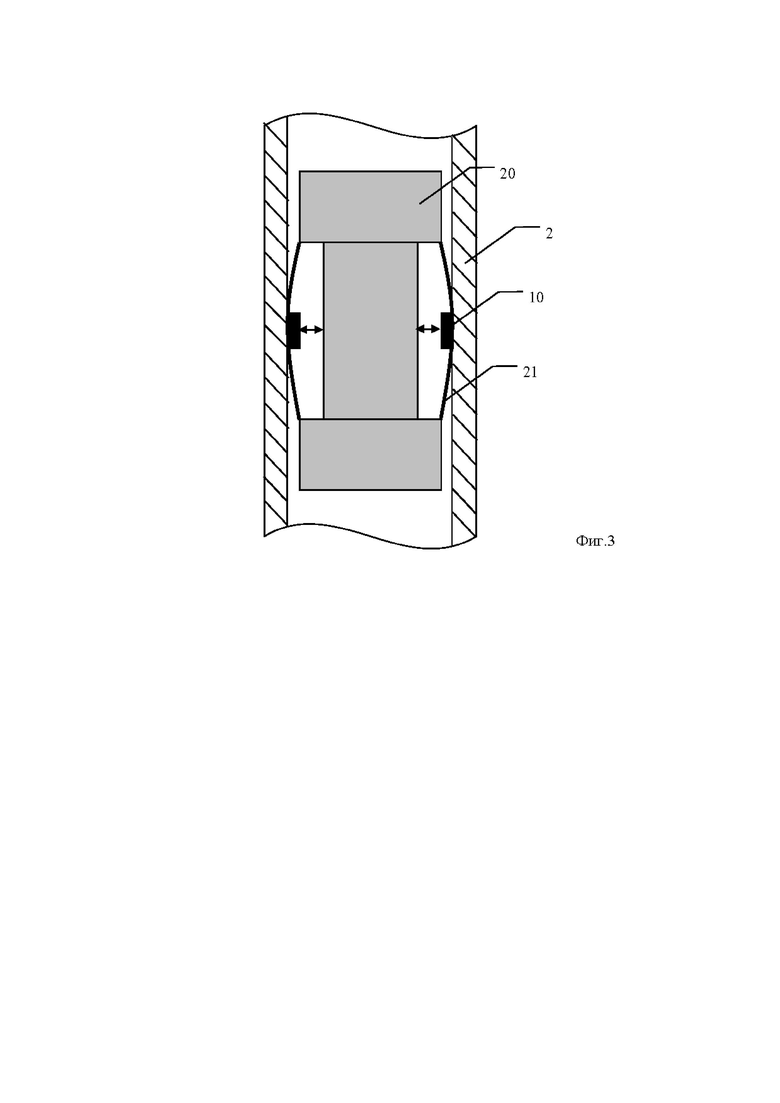
На фиг. 1 представлена схема подключения основных функциональных узлов электромагнитно-акустического интроскопа для диагностического обследования обсадных колон и насосно-компрессорных труб скважин, на фиг. 2 – его функциональная схема, на фиг. 3 – схема размещения N электромагнитно-акустических преобразователей.
На фиг. 1-3 изображены: земля 1, обсадная колонна или насосно-компрессорная труба 2 скважины, скважинный модуль 3 в защитном корпусе, система 4 определения глубины скважинного модуля, геофизический кабель 5, каротажный подъемник 6, блок 7 наземной электроники, компьютер 8, автомобиль (каротажная станция) 9, электромагнитно-акустический преобразователь 10, устройство 11 намагничивания, излучатель 12 ультразвуковой волны, регистратор 13 ультразвуковой волны, коммутатор 14 тока подмагничивания, блок 15 формирования сигналов возбуждения, узел 16 мультиплексирования и преобразования отраженного сигнала, бортовой контроллер 17, источник 18 питания, наземный контроллер 19, защитный корпус 20 скважинного модуля, гибкая лыжа 21 для прижатия электромагнитно-акустического преобразователя к внутренней поверхности обсадной колонны или насосно-компрессорной трубы, Нп – импульсное магнитное поле подмагничивания, Нв – переменное магнитное поле возбуждения излучателя ультразвуковой волны, Нс – переменное магнитное поле, наведенное в регистраторе при поступлении отраженного акустического сигнала.
При этом скважинный модуль 3 в защитном корпусе подсоединен посредством геофизического кабеля 5 к блоку 7 наземной электроники, при этом выход источника 18 питания подсоединен к первому входу бортового контроллера 17, первый выход которого связан с первым входом наземного контроллера 19, подключенного вторым входом к выходу системы 4 определения глубины скважинного модуля, а выходом к компьютеру 8, второй и третий выходы бортового контроллера 17 соединены со входами, соответственно, коммутатора 14 тока подмагничивания и блока 15 формирования сигналов возбуждения, каждый из N выходов коммутатора 14 тока подмагничивания подключен ко входу устройства 11 намагничивания каждого из N электромагнитно-акустических преобразователей 10, а каждый из N выходов блока 15 формирования сигналов возбуждения - ко входу излучателя 12 ультразвуковой волны каждого из N электромагнитно-акустических преобразователей 10, выход регистратора 13 ультразвуковой волны каждого из N электромагнитно-акустических преобразователей 10 связан с одним из входов узла 16 мультиплексирования и преобразования отраженного сигнала, выход которого соединен со входом бортового контроллера 19, N электромагнитно-акустических преобразователей 10 расположены в виде матрицы или строки со стороны внутренней поверхности по окружности обсадной колонны или насосно-компрессорной трубы 2 скважины таким образом, чтобы было обеспечено максимально возможное их прижатие к внутренней поверхности, например, с использованием гибких лыж 21 или иным способом, например, с помощью гибких полиуретановых либо резиновых манжет, механических пружин, устройство 11 намагничивания, излучатель 12 ультразвуковой волны и регистратор 13 ультразвуковой волны каждого из N электромагнитно-акустических преобразователей 10 взаимно расположены таким образом, чтобы направление формируемой и регистрируемой с их использованием ультразвуковой волны было перпендикулярно стенке обсадной колонны или насосно-компрессорной трубы 2 скважины.
Для работы электромагнитно-акустического интроскопа для диагностического обследования обсадных колон и насосно-компрессорных труб скважин используются следующие основные устройства и механизмы: скважинный модуль 3 в защитном корпусе, система 4 определения глубины скважинного модуля, геофизический кабель 5, каротажный подъемник 6, блок 7 наземной электроники, персональный компьютер 8.
Электромагнитно-акустический интроскоп для диагностического обследования обсадных колон и насосно-компрессорных труб скважин функционирует следующим образом (фиг. 1).
Скважинный модуль 3 в защитном корпусе, опускаемый на геофизическом кабеле 5 в обсадную колонну или насосно-компрессорную трубу 2 скважины, после запасовки погружается в обсадную колонне или насосно-компрессорной трубе 2 скважины под собственным весом до заданной глубины. Далее производится подъем скважинного модуля 3 в защитном корпусе посредством геофизического кабеля 5 и каротажного подъемника 6. В процессе спуска и/или подъема производится получение данных от скважинного модуля 3 в защитном корпусе, опускаемого в обсадную колонну или насосно-компрессорную трубу 2 скважины. При этом для определения глубины скважинного модуля 3 в защитном корпусе, опускаемого в обсадную колонну или насосно-компрессорную трубу 2 скважины, используется система 4 определения глубины скважинного модуля, например, сельсин. Данные, поступающие от скважинного модуля 3 в защитном корпусе, опускаемого в обсадную колонну или насосно-компрессорную трубу 2 скважины, стробируются системой 4 определения глубины скважинного модуля, обрабатываются блоком 7 наземной электроники и записываются в персональный компьютер 8.
Скважинный модуль 3 в защитном корпусе состоит из коммутатора 14 тока подмагничивания, блока 15 формирования сигналов возбуждения, узла 16 мультиплексирования и преобразования отраженного сигнала, бортового контроллера 17 и N электромагнитно-акустических преобразователей 10, расположенных в виде матрицы или строки со стороны внутренней поверхности по окружности обсадной колонны или насосно-компрессорной трубы 2 скважины таким образом, чтобы было обеспечено максимально возможное их прижатие к внутренней поверхности, например, с использованием гибких лыж 21, установленных на защитном корпусе 20 скважинного модуля (фиг. 3), или иным способом, например, с помощью гибких полиуретановых либо резиновых манжет, механических пружин, каждый из которых включает в себя устройство 14 намагничивания, излучатель 15 ультразвуковой волны и регистратор 16 ультразвуковой волны, взаимно расположенные таким образом, чтобы направление формируемой и регистрируемой с их использованием ультразвуковой волны было перпендикулярно стенке обсадной колонны или насосно-компрессорной трубы 2 скважины.
Функциональное взаимодействие блоков прибора осуществляется следующим образом (фиг. 2).
Электропитание всех узлов электромагнитно-акустического интроскопа для диагностического обследования обсадных колон и насосно-компрессорных труб скважин, в том числе всех узлов скважинного модуля 3 в защитном корпусе, осуществляется наземным источником 18 питания.
Бортовой контроллер 17, используя блок 15 формирования сигналов возбуждения, формирует в излучателе 12 ультразвуковой волны ток ультразвуковой частоты. В результате этого у внутренней поверхности стенки обсадной колонны или насосно-компрессорной трубы 2 скважины создается переменное магнитное поле напряженностью Нв, а на поверхности возникают вихревые токи. Одновременно бортовой контроллер 17, используя коммутатор 14 тока подмагничивания, формирует с помощью устройства 11 намагничивания в области возникновения упомянутых вихревых токов импульсное поле подмагничивания напряженностью Нп.
Взаимодействуя с магнитным полем подмагничивания напряженностью Нп, вихревой ток, возбужденный переменным магнитным полем ультразвуковой частоты и напряженностью Нв, создает силу Лоренца, которая вызывает ультразвуковые колебания в локальной поверхностной области металла стенки обсадной колонны или насосно-компрессорной трубы 2 скважины непосредственно под устройством 11 намагничивания и излучателем 12 ультразвуковой волны. Ультразвуковые колебания передаются по стенке обсадной колонны или насосно-компрессорной трубы 2 скважины, превращаясь в бегущую ультразвуковую волну. Конструкции устройства 11 намагничивания и излучателя 12 ультразвуковой волны подбираются таким образом, чтобы направление распространения ультразвуковой волны было перпендикулярным стенки обсадной колонны или насосно-компрессорной трубы 2 скважины.
Отразившись от дефекта или от противоположной стенки обсадной колонны или насосно-компрессорной трубы 2 скважины, волна возвращается, вызывая колебания поверхности металла. Так как поверхность находится в постоянном магнитном поле, ее колебания приводят к возникновению высокочастотного переменного тока, наводящего в области регистратора 12 ультразвуковой волны переменное магнитное поле напряженностью Нс. Оно преобразуется последним в электрический сигнал и поступает на вход узла 16 мультиплексирования и преобразования отраженного сигнала, в котором усиливается, фильтруется, и регистрируется в бортовом контроллере 17. Время между возбуждением и регистрацией отраженной ультразвуковой волны прямо пропорционально толщине стенки обсадной колонны или насосно-компрессорной трубы 2 скважины и является основным информативным параметром.
Таким образом бортовой контроллер 17 по заранее заданному алгоритму с установленной частотой опрашивает все N электромагнитно-акустических преобразователей 10 и передает данные о толщине стенки обсадной колонны или насосно-компрессорной трубы 2 скважины по геофизическому кабелю 5 в наземный контроллер 19, после обработки которым данные записываются в персональный компьютер 8 и используются для оценки состояния обсадной колонны или насосно-компрессорной трубы 2 скважины с помощью специального программного обеспечения.
Апертура электромагнитно-акустических преобразователей 10 определяется габаритными размерами устройства 11 намагничивания, излучателя 12 и регистратора 13 ультразвуковой волны и составляет порядка 8-10 мм.
Стробирование посылок данных от бортового контроллера 17 в наземный контроллер 19 производится с использованием системы 4 определения глубины скважинного модуля. Выбор частоты опроса N электромагнитно-акустических преобразователей 10 бортовым контроллером 17 осуществляется таким образом, что сканирование внутренней поверхности обсадной колонны или насосно-компрессорной трубы 2 скважины производится с заданным шагом ∆, обычно составляющим от 2-3 до 10 мм. Выбор величины ∆ и апертуры электромагнитно-акустических преобразователей 10 задаёт разрешающую способность оборудования.
Обработка данных осуществляется программным обеспечением компьютера 8 и позволяет определять толщину стенки, вид, форму, параметры дефектов, их взаимное расположение и местоположение на обсадной колонне или насосно-компрессорной трубе 2 скважины, а также факт её сквозного повреждения. Также регистрируются и особенности конструкции обсадной колонны или насосно-компрессорной трубы 2 скважины: пакер-гильзы, соединительные муфты и величина межтрубного зазора в муфтовом соединении, ремонтные заплаты, врезки труб боковых стволов и т.п.
В результате работы оборудования информация о распределении толщины стенки обсадной колонны или насосно-компрессорной трубы 2 скважины, а также наличии и размерах её дефектов считывается с использованием N электромагнитно-акустических преобразователей 10, обрабатывается и записывается в компьютер. В дальнейшем она с использованием специального программного обеспечения представляется в виде, удобном для принятия решения оператором о дальнейших действиях по эксплуатации обсадной колонны или насосно-компрессорной трубы 2 скважины, проведения прочностных расчетов, составления отчетов по диагностическому обследованию, а также хранения и других возможных действий, потребность в которых может возникнуть после анализа полученной диагностической информации.
Источники информации, принятые во внимание
1. High Resolution Acoustic Televiewer (HRAT) [Электронный ресурс]: https://www.robertson-geo.com/wp-content/themes/robertson/downloadfiles/usermanual/1549561343.pdf (дата обращения: 04-06-2020).
2. Внутритрубная диагностика методом ЭМАП (EMAT) [Электронный ресурс]: http://ntcngd.com/uslugi/article_post/vnutritrubnaya-diagnostika-metodom-emap-emat (дата обращения: 04-06-2020).
3. Патент РФ №2477853 Сканирующий магнитный интроскоп для дефектоскопического контроля стальных эксплуатационных колонн скважин Авторы: А.А.Абакумов (мл.), Н.Г.Ибрагимов, В.Г.Фадеев и др. Зарегистрировано в Государственном реестре изобретений 20.03.2013 г.
4. Электромагнитно-акустический толщиномер А1270 [Электронный ресурс]: https://acsys.ru/elektromagnitno-akusticheskij-tolshhinomer-a1270/ (дата обращения: 04-06-2020).
5. Аналоговые ключи и мультиплексоры. [Электронный ресурс]: https://www.analog.com/ru/products/switches-multiplexers/analog-switches-multiplexers.html (дата обращения: 04-06-2020).
6. Хоровиц П., Хилл У. «Искусство схемотехники»: Пер. с англ. Изд. 2-е. М.: Издательство БИНОМ, 2014 г., 704 с.
7. Double channel high side driver with analog current sense for automotive applications. VND5E050AJ-E, VND5E050AK-E. [Электронный ресурс]: https://static.chipdip.ru/lib/080/DOC001080270.pdf (дата обращения: 04-06-2020).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТРОСКОП МАГНИТНЫЙ СКВАЖИННЫЙ | 2008 |
|
RU2382357C1 |
| УСТРОЙСТВО ДИАГНОСТИКИ ДЕФЕКТОВ В СООРУЖЕНИЯХ ИЗ ТРУБНЫХ СТАЛЕЙ | 2015 |
|
RU2620327C1 |
| СКАНИРУЮЩИЙ МАГНИТНЫЙ ИНТРОСКОП ДЛЯ ДЕФЕКТОСКОПИЧЕСКОГО КОНТРОЛЯ СТАЛЬНЫХ ЭКСПЛУАТАЦИОННЫХ КОЛОНН СКВАЖИН | 2011 |
|
RU2477853C1 |
| КОМБИНИРОВАННЫЙ СПОСОБ ОЧИСТКИ НАСОСНО-КОМПРЕССОРНОЙ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2627520C1 |
| ИНТРОСКОП МАГНИТНЫЙ СКВАЖИННЫЙ И ЛЫЖА ДЛЯ НЕГО | 2020 |
|
RU2753914C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ИНТЕНСИФИКАЦИИ ДОБЫЧИ НЕФТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2630012C1 |
| Устройство для магнитной дефектоскопии насосных штанг | 2019 |
|
RU2713282C1 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ ДЛЯ МОНИТОРИНГА ЗА ПРОЦЕССОМ ДОБЫЧИ УГЛЕВОДОРОДОВ | 2012 |
|
RU2489570C1 |
| Способ электромагнитной дефектоскопии эксплуатационных колонн нефтяных и газовых скважин | 2017 |
|
RU2651732C1 |
| Устройство для обработки призабой-НОй зОНы плАСТА | 1979 |
|
SU794200A1 |
Использование: для диагностического обследования обсадных колонн и насосно-компрессорных труб скважин. Сущность изобретения заключается в том, что электромагнитно-акустический интроскоп для диагностического обследования обсадных колонн и насосно-компрессорных труб скважин состоит из скважинного модуля в защитном корпусе, включающего в себя бортовой контроллер, блока наземной электроники, содержащего источник питания, наземный контроллер и систему определения глубины скважинного модуля в защитном корпусе, и геофизического кабеля, при этом в состав скважинного модуля в защитном корпусе введены коммутатор тока подмагничивания, блок формирования сигналов возбуждения, узел мультиплексирования и преобразования отраженного сигнала и N электромагнитно-акустических преобразователей с возможностью их размещения в виде матрицы или строки. Технический результат: расширение функциональных возможностей устройства. 8 з.п. ф-лы, 3 ил.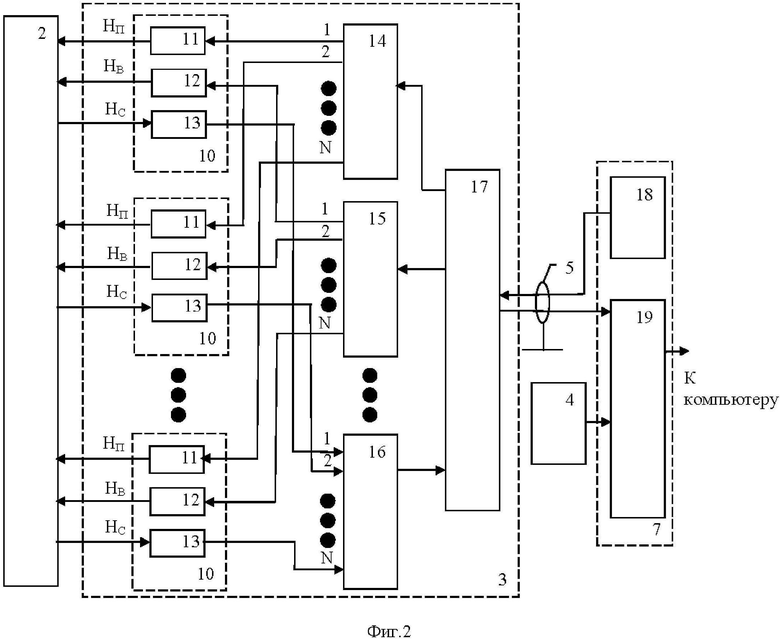
1. Электромагнитно-акустический интроскоп для диагностического обследования обсадных колонн и насосно-компрессорных труб скважин, состоящий из скважинного модуля в защитном корпусе, включающего в себя бортовой контроллер, блока наземной электроники, содержащего источник питания, наземный контроллер и систему определения глубины скважинного модуля в защитном корпусе, и геофизического кабеля, отличающийся тем, что в состав скважинного модуля в защитном корпусе введены коммутатор тока подмагничивания, блок формирования сигналов возбуждения, узел мультиплексирования и преобразования отраженного сигнала и N электромагнитно-акустических преобразователей с возможностью их размещения в виде матрицы или строки.
2. Интроскоп по п.1, отличающийся тем, что скважинный модуль в защитном корпусе подсоединен посредством геофизического кабеля к блоку наземной электроники, при этом выход источника питания подсоединен к первому входу бортового контроллера, первый выход которого связан с первым входом наземного контроллера, подключенного вторым входом к выходу системы определения глубины скважинного модуля в защитном корпусе, а выходом - к компьютеру.
3. Интроскоп по п.1, отличающийся тем, что каждый из N электромагнитно-акустических преобразователей включает в себя устройство намагничивания, излучатель ультразвуковой волны и регистратор ультразвуковой волны, с возможностью их взаимного расположения таким образом, чтобы направление формируемой и регистрируемой с их использованием ультразвуковой волны было перпендикулярно стенке обсадной колонны или насосно-компрессорной трубы.
4. Интроскоп по п.1, отличающийся тем, что N электромагнитно-акустических преобразователей расположены со стороны внутренней поверхности по окружности обсадной колонны или насосно-компрессорной трубы скважины.
5. Интроскоп по п.1, отличающийся тем, что N электромагнитно-акустических преобразователей прижимаются к внутренней поверхности колонны или насосно-компрессорной трубы скважины с использованием гибких лыж или с помощью гибких полиуретановых или резиновых манжет, механических пружин.
6. Интроскоп по п.1, отличающийся тем, что второй и третий выходы бортового контроллера соединены со входами соответственно коммутатора тока подмагничивания и блока формирования сигналов возбуждения.
7. Интроскоп по п.1, отличающийся тем, что каждый из N выходов коммутатора тока подмагничивания подключен ко входу устройства намагничивания каждого из N электромагнитно-акустических преобразователей.
8. Интроскоп по п.1, отличающийся тем, что каждый из N выходов блока формирования сигналов возбуждения подключен ко входу излучателя ультразвуковой волны каждого из N электромагнитно-акустических преобразователей.
9. Интроскоп по п.1, отличающийся тем, что выход регистратора ультразвуковой волны каждого из N электромагнитно-акустических преобразователей связан с одним из входов узла мультиплексирования и преобразования отраженного сигнала, выход которого соединен со входом бортового контроллера.
| ТУРБИНА, РАБОТАЮЩАЯ ВНУТРЕННИМ ГОРЕНИЕМ И НАГРЕТЫМ ВОЗДУХОМ | 1926 |
|
SU7258A1 |
| СПОСОБ ОЦЕНКИ СЦЕПЛЕНИЯ ТРУБООБРАЗНОГО ЭЛЕМЕНТА, РАЗМЕЩЕННОГО В СКВАЖИНЕ | 2006 |
|
RU2434130C2 |
| Способ выделения объемных дефектов цементного кольца в обсаженных скважинах | 1985 |
|
SU1348505A1 |
| US 2007211572 A1, 13.09.2007 | |||
| US 5619423 A, 08.04.1997. | |||

