Изобретение относится к области адаптивной оптики и может быть использовано для локации с земли движущихся космических объектов, таких как элементы космического мусора, отработанные ракетные модули и др.
Из существующего уровня техники известен способ компенсации атмосферных искажений, реализованный на оптическом широко апертурном телескопе Starfire Optical Range, представленный в статье [1]. Способ компенсации заключается в том, что осуществляют визуализацию и автосопровождение космического тела (далее КТ), формируют в поле зрения системы визуализации искусственный опорный источник - релеевскую оптическую звезду (далее РЗ) с помощью лазера, направляют регистрируемый оптический сигнал от КТ и РЗ на адаптивную оптическую систему (далее АОС), и через селективный оптический элемент, отводят сигнал РЗ на регистратор, при этом передача сигнала происходит в два этапа, на первом из которых сигнал проходит через АОС без внесения ею дополнительных искажений, а на втором этапе, с помощью АОС по определенному алгоритму вносят поправки в волновой фронт регистрируемого сигнала, организуют замкнутый цикл работы АОС по обратной связи с помощью сигнала РЗ на регистраторе, затем о выполнении компенсации судят по достижению плоского волнового фронта. В данном способе оптический сигнал от РЗ направляют на регистратор, в качестве которого применяют датчик Шака-Гартмана, позволяющий измерять волновой фронт оптического сигнала. В датчике регистрируемый оптический сигнал распределяется и проецируется на отдельные участки (субапертуры) полупроводниковой матрицы с помощью линзового растра. Размер проецируемого на субапертуру матрицы изображения и фокуса линз растра подбираются исходя из значения радиуса Фрида, характеризующего пространственный масштаб однородности волнового фронта, характерный для конкретных астроклиматических условий. С помощью датчика Шака-Гартмана на первом этапе регистрируется волновой фронт оптического сигнала РЗ и оценивается профиль его искажений. Затем, на втором этапе рассчитываются компенсационные коэффициенты, и, с помощью деформируемых зеркал АОС, осуществляется компенсация искажений, вносимых турбулентной атмосферой в общий регистрируемый оптический сигнал.
Недостатком аналога является малая высота расположения РЗ (~10-15 км), что не позволяет компенсировать искажения, вносимые турбулентной атмосферой, на высотах свыше 15 км. Применение датчика волнового фронта существенно нагружает вычислительную систему, поскольку ведется обработка нескольких изображений РЗ.
Наиболее близким по технической сущности и назначению к заявляемому изобретению является способ компенсации атмосферных искажений, вносимых турбулентной атмосферой, в оптический сигнал, получаемый от наблюдаемого космического тела, представленный в статье [2], и заключающийся в том, что осуществляют визуализацию и автосопровождение КТ, формируют на заданном упреждении в поле зрения системы визуализации искусственный опорный источник - натриевую оптическую звезду (далее НЗ) с помощью лазера, направляют регистрируемый оптический сигнал от КТ и НЗ на АОС, и через селективный оптический элемент, отводят сигнал НЗ на регистратор, при этом передача сигнала происходит в два этапа, на первом из которых сигнал проходит через АОС без внесения ею дополнительных искажений, а на втором этапе, с помощью АОС по определенному алгоритму вносят поправки в волновой фронт регистрируемого сигнала, организуют замкнутый цикл работы АОС по обратной связи с помощью сигнала НЗ на регистраторе, затем о выполнении компенсации судят по достижению плоского волнового фронта. В данном способе оптический сигнал от НЗ направляют на регистратор, в качестве которого применяют датчик Шака-Гартмана. С помощью датчика Шака-Гартмана на первом этапе регистрируется волновой фронт оптического сигнала НЗ и оценивается профиль его искажений. Затем, на втором этапе рассчитываются компенсационные коэффициенты, и, с помощью деформируемых зеркал АОС, осуществляется компенсация искажений, вносимых турбулентной атмосферой в общий регистрируемый оптический сигнал.
Представленный способ компенсации обладает рядом недостатков. Для оптимальной работы датчика Шака-Гартмана требуется достаточно яркая НЗ, поскольку общий оптический сигнал разделяется на множество субапертур, на каждой интенсивность сигнала должна быть высокой. Иначе из-за недостаточно высокой интенсивности НЗ датчик не сможет зарегистрировать полезный сигнал, поскольку для подобных многоканальных детекторов характерно низкое значение отношения «сигнал/шум». Поэтому, для реализации данного способа требуется мощный лазерный источник для формирования яркой НЗ. Помимо интенсивности сигнала, для данного датчика требуется некоторое время для накопления и обработки, что уменьшает скорость работы способа в целом. Также, для данного способа требуется существенный вычислительный ресурс, поскольку необходимо одновременно обрабатывать сигнал с каждой субапертуры.
Технический результат заключается в упрощении процесса компенсации, поскольку не требуется измерять волной фронт, в уменьшении требуемого для работы уровня интенсивности сигнала от НЗ за счет регистрации одним детектором с одной апертурой, к тому же, это позволяет существенно снизить вычислительный ресурс, затрачиваемый на обработку сигнала. Также, в существенном увеличении скорости работы способа за счет применения более скоростного регистратора.
Указанный технический результат достигается тем, что в способе компенсации атмосферных искажений, вносимых турбулентной атмосферой в оптический сигнал, получаемый от наблюдаемого КТ осуществляют визуализацию и автосопровождение КТ, формируют на заданном упреждении в поле зрения системы визуализации искусственный опорный источник - НЗ с помощью лазера, направляют регистрируемый оптический сигнал от КТ и НЗ на АОС, и через селективный оптический элемент отводят сигнал НЗ на регистратор, при этом передача сигнала происходит в два этапа, на первом из которых сигнал проходит через АОС без внесения ею дополнительных искажений, а на втором этапе, с помощью АОС, по определенному алгоритму, вносят поправки в волновой фронт регистрируемого сигнала, организуют замкнутый цикл работы АОС по обратной связи с помощью сигнала НЗ на регистраторе, затем о выполнении компенсации судят по достижению плоского волнового фронта, новым является то. что на втором этапе передачи сигнала компенсацию искажений осуществляют путем апертурного зондирования НЗ с помощью АОС, работающего по алгоритму нахождения максимума целевой функции, которой соответствует число зарегистрированных фотонов, прошедших через диафрагму дифракционного размера, при котором обратная связь осуществляется по регистратору, в качестве которого применяют счетчик фотонов, а в качестве рабочего сигнала принимают число фотонов, причем о достижении плоского волнового фронта судят по максимуму целевой функции.
Влияние отличительных признаков патентной формулы на вышеуказанный технический результат.
Осуществление на втором этапе компенсации искажений путем апертурного зондирования НЗ с помощью АОС, работающего по алгоритму нахождения максимума целевой функции, которой соответствует число зарегистрированных фотонов, прошедших через диафрагму дифракционного размера, позволяет получить плоский волновой фронт регистрируемого оптического сигнала только за счет достижения максимума целевой функции, согласно статье Баффигтона и Мюллера [3]. Поскольку, только достигнув плоского волнового фронта, угловой размер НЗ будет соответствовать дифракционному, и оптический сигнал от нее будет полностью проходить через диафрагму согласующего телескопа на регистратор. К тому же, диафрагма позволяет избавиться от фоновых шумов, что дает возможность применять более чувствительные детекторы. Помимо этого, для работы алгоритма не требуется сбор и анализ информации о волновом фронте, анализируется только число фотонов.
Осуществление обратной связи по регистратору, в качестве которого применяют счетчик фотонов, а в качестве рабочего сигнала принимают число фотонов, позволяет уменьшить время работы алгоритма, поскольку данному типу детекторов требуется на порядок меньше времени для накопления сигнала и последующей его обработки, в отличие от датчиков волнового фронта. К тому же, счетчики фотонов имеют высокую светочувствительность, что позволяет работать с менее яркими по интенсивности НЗ, что, в свою очередь, снижает требования к мощности лазерных источников накачки НЗ. Также, применение счетчиков фотонов снижает вычислительную нагрузку на систему, т.к. ведется обработка сигнала от одного оптического источника, а не нескольких, как в датчике волнового фронта, что также влияет на вышеуказанный технический результат. Еще одним преимуществом подобных детекторов является высокое значение отношения «сигнал/шум».
Достижение плоского волнового фронта по максимуму целевой функции позволяет полностью скомпенсировать атмосферные искажения на оптической трассе от регистратора до наблюдаемого КТ.
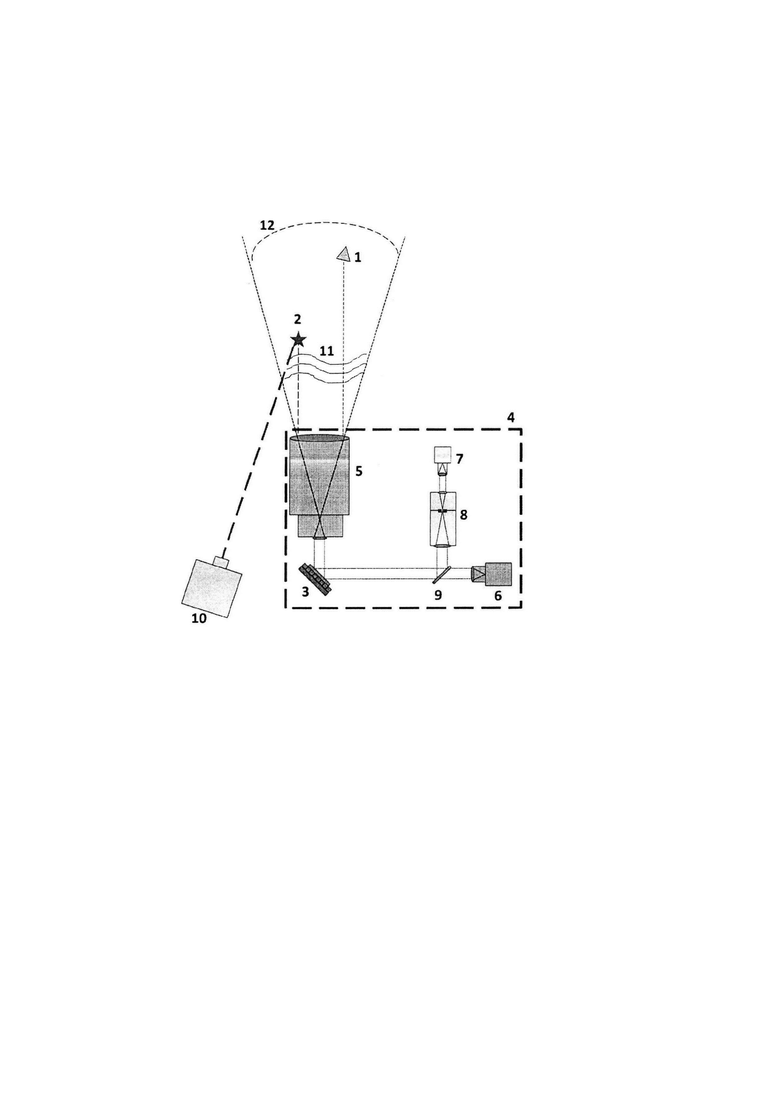
Предлагаемое изобретение представлено на чертеже, где позициями обозначены:
1 - космическое тело (КТ), 2 - натриевая оптическая звезда (НЗ), 3 - адаптивная оптическая система (АОС), 4 - система визуализации, 5 - телескоп системы визуализации, 6 - камера системы визуализации с объективом, 7 - регистратор с объективом, 8 - согласующий телескоп с угловой диафрагмой дифракционного размера, 9 - селективный оптический элемент, 10 - лазер, 11 - турбулентная атмосфера, 12 - поле зрение системы визуализации.
КТ(1) представляет собой элемент космического мусора или отработанный ракетный модуль, вращающийся на околоземной орбите на высотах от 300 км до 1500 км. В процессе своего движения КТ не меняет траектории и высоты.
НЗ (2) представляет собой локальную область флуоресцентного свечения атомов натрия в слое термосферы на высотах от 90 до 100 км, возбуждаемых под воздействием оптического излучения на характерной резонансной длине волны. НЗ формируется в направлении лазерного излучения, и ее размер характеризуется диаметром и расходимостью луча лазера.
АОС (3) представляет собой замкнутую оптическую систему, основными элементами которой являются деформируемые зеркала. С помощью деформируемых зеркал осуществляется коррекция волнового фронта посредством локального изменения кривизны оптической поверхности зеркала. Изменение поверхности происходит с помощью пьезоэлектрических емкостных толкателей. Под воздействием напряжения, подаваемого на контакты, пьезоэлемент толкателя способен изменять свои геометрические размеры и надавливать на обратную поверхность зеркала приводя к прогибу и локальному искривлению поверхности. В качестве основного элемента АОС применялось биморфное адаптивное зеркало производства ООО «Институт адаптивной оптики» серии КВФ45.
Система визуализации (4) представляет собой оптический комплекс, состоящий из телескопа системы визуализации - 5, АОС - 3, селективного элемента - 9, согласующего телескопа с угловой диафрагмой дифракционного размера - 8, регистратрра с объективом - 7 и камеры системы визуализации с объективом - 6. Целью работы системы является отображение наблюдаемых КТ. Система размещается на подготовленной площадке с ровным и твердым покрытием или в помещении на оптическом столе.
Телескоп системы визуализации (5) представляет собой широкоапертурный оптический телескоп, согласующий размер собственной приемной апертуры с размером деформируемого зеркала АОС. Телескоп монтируется на управляемое опорно-поворотное устройство, обеспечивающее автосопровождение наблюдаемых КТ. В качестве телескопа системы визуализации применялся оптический телескоп производства компании Mead.
Камера системы визуализации с объективом (6) представляет собой матричную камеру с объективом, сопряженным по кратности с телекопом системы визуализации. Камера размещается на оптическом столе по направлению к общему регистрируемому оптическому сигналу.
Регистратор с объективом (7) представляет собой лавинный фотодиод (счетчик фотонов), позволяющий регистрировать единичные фотоны. Факт регистрации фотона подтверждается выдачей TTL-импульса заданной длительности и амплитуды на выходе счетчика фотонов. Размещается регистратор на оптическом столе по направлению к отведенному оптическому сигналу НЗ. В качестве регистратора применялся счетчик единичных фотонов производства компании Laser Component (Германия).
Согласующий телескоп с угловой диафрагмой дифракционного размера (8) представляет собой оптический телескоп, согласованный по кратности с телескопом системы визуализации. Между оптическими элементами согласующего телескопа в центре перетяжки размещается угловая диафрагма дифракционного размера, характерного для данной оптической системы. Диафрагма представляет собой пластинку с отверстием заданного диаметра.
Селективный оптический элемент (9) оптический клин с нанесенным на поверхность диэлектрическим покрытием. Покрытие позволяет отводить на счетчик фотонов оптический сигнал на длине волны, соответствующей сигналу НЗ под определенным углом, а остальной сигнал пропускать на камеру системы визуализации.
Лазер (10) представляет собой оптический квантовый генератор с обратной связью. Длина волны излучения лазера соответствует D2-линии резонансного поглощения атомов натрия. Система вывода излучения лазера размещается отдельно от системы визуализации.
Турбулентная атмосфера (11) - случайные неоднородности показателя преломления, возникающие при турбулентном движении в атмосфере, обусловливают существенное снижение теоретической разрешающей силы, приводят к потерям в проницающей способности оптического телескопа, а как следствие вызывают такие эффекты, как размытие, дрожание и мерцание оптического изображения [4].
Поле зрения системы визуализации (12) - область пространства в угловой мере, захватываемая телескопом системы визуализации и проецируемое на матрицу камеры системы визуализации. Поле зрения определяется размером единичного пикселя и параметрами оптической системы.
Способ компенсации атмосферных искажений, вносимых турбулентной атмосферой (11), в оптический сигнал, получаемый от наблюдаемого КТ (1) реализуется следующим образом. Сначала осуществляют визуализацию и автосопровождение КТ (1) с помощью системы визуализации (4), формируют на заданном упреждении в поле зрения системы визуализации (12) искусственный опорный источник - НЗ (2) с помощью лазера (10). Затем, направляют регистрируемый оптический сигнал от КТ (1) и НЗ (2) через телескоп системы визуализации (5) на АОС (3), и через селективный оптический элемент (9) отводят сигнал НЗ (2) на согласующий телескоп с угловой диафрагмой дифракционного размера (8), пройдя через который, сигнал попадает на регистратор с объективом (7), остальной сигнал принимается камерой системой визуализации с объективом (6). Передача сигнала происходит в два этапа, на первом из которых сигнал проходит через АОС (3) без внесения искажений. На втором этапе, организуется замкнутый цикл работы АОС (3) с обратной связью по сигналу НЗ (2) на регистраторе (7). Работа АОС (3) выполняется по алгоритму нахождения максимума целевой функции, которой соответствует число зарегистрированных фотонов, прошедших через угловую диафрагму дифракционного размера согласующего телескопа (8) на регистратор (7). В процессе работы АОС (3) по данному алгоритму, вносятся поправки в волновой фронт регистрируемого сигнала, тем самым, осуществляется компенсация искажений путем апертурного зондирования НЗ (2). Достижению плоского волнового фронта регистрируемого оптического сигнала соответствует максимальное значение зарегистрированных фотонов. В случае полной компенсации искажений волнового фронта, камерой системы визуализации будет регистрироваться восстановленное изображение КТ, лишенное атмосферных аберраций.
К настоящему времени на предприятии проведены исследования и эксперименты по представленному способу компенсации атмосферных искажений с использованием НЗ.
Список источников:
[l] R. Fugate, В. Ellerbroek, С.Higgins. М. Jelonek. W. Lange, A. Slavin и W. Wild, «Two generations of laser-guide-star adaptive-optics experiments at the Starfire Optical Range,» Optical Society of America, т. 11, №l, pp. 310-324, 1994.
[2] M. Boccas, F. Rigaut, M. Вес, B. Irarrazaval, E. James, A. Ebbers, C. d'Orgeville, K. Grace, G. Arriagada, S. Karewicz, M. Sheehan, J. White и S. Chan, «Laser Guide Star upgrade of Altair at Gemeni North,» 2007. [В Интернете]. Available: www.gemini.edu.
[3] R. Muller и A. Buffugton, Journ. Opt. Soc. Amer., т.64, pp. 1200-1210, 1974.
[4] Л.А. Больбасова и В.П. Лукин, Адаптивная коррекция атмосферных искажений оптических изображений на основе искусственного опорного источника, Москва: ФИЗМАТЛИТ, 2012.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система апертурного зондирования компенсации искажений волнового фронта в лазерных системах | 2022 |
|
RU2791833C1 |
| Адаптивная система апертурного зондирования компенсации искажений волнового фронта в лазерных системах | 2024 |
|
RU2823912C1 |
| СПОСОБ КВАНТОВОЙ КРИПТОГРАФИИ С ИСПОЛЬЗОВАНИЕМ ПАССИВНЫХ ОТРАЖАЮЩИХ И ПЕРЕНАПРАВЛЯЮЩИХ ЭЛЕМЕНТОВ, РАСПОЛАГАЕМЫХ НА КОСМИЧЕСКИХ АППАРАТАХ | 2014 |
|
RU2566664C1 |
| СПОСОБ ИССЛЕДОВАНИЯ АТМОСФЕРНОЙ ТУРБУЛЕНТНОСТИ ПО АНАЛИЗУ МЕРЦАНИЯ ЗВЕЗД И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2805129C1 |
| Лазерный голографический локатор | 2023 |
|
RU2812809C1 |
| Способ получения и обработки изображений дистанционного зондирования Земли, искажённых турбулентной атмосферой | 2016 |
|
RU2629925C1 |
| Способ достижения дифракционного предела разрешения изображений дистанционного зондирования Земли для малых космических аппаратов | 2019 |
|
RU2730886C1 |
| СПОСОБ ОЦЕНКИ ОСЕВОЙ ИНТЕНСИВНОСТИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ (ВАРИАНТЫ) | 2024 |
|
RU2834203C1 |
| ЛАЗЕРНАЯ ГОЛОГРАФИЧЕСКАЯ ПРИЕМНАЯ СИСТЕМА | 2022 |
|
RU2799499C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ВОЛНОВОГО ФРОНТА НА ОСНОВЕ СВЕТОВОГО ПОЛЯ | 2022 |
|
RU2808933C1 |
Изобретение относится области адаптивной оптики и может быть использовано для локации с земли движущихся космических объектов. В способе компенсации атмосферных искажений, вносимых турбулентной атмосферой в оптический сигнал, получаемый от наблюдаемого космического тела (КТ), осуществляют визуализацию и автосопровождение КТ, формируют на заданном упреждении в поле зрения системы визуализации искусственный опорный источник - натриевую оптическую звезду (НЗ) с помощью лазера, направляют регистрируемый оптический сигнал от КТ и НЗ на адаптивную оптическую систему (АОС), и через селективный оптический элемент отводят сигнал НЗ на регистратор. Передача сигнала происходит в два этапа, на первом сигнал проходит АОС без внесения ею дополнительных искажений, а на втором этапе с помощью АОС вносят поправки в волновой фронт регистрируемого сигнала, организуют замкнутый цикл работы АОС по обратной связи с помощью сигнала НЗ на регистраторе, затем о выполнении компенсации судят по достижению плоского волнового фронта. Также на втором этапе компенсацию искажений осуществляют путем апертурного зондирования НЗ с помощью АОС, работающей по алгоритму нахождения максимума целевой функции, которой соответствует число зарегистрированных фотонов, прошедших через диафрагму дифракционного размера, при котором обратная связь осуществляется по регистратору, в качестве которого применяют счетчик фотонов, а в качестве рабочего сигнала принимают число фотонов, причем о достижении плоского волнового фронта судят по максимуму целевой функции. Технический результат заключается в упрощении процесса компенсации. 1 ил.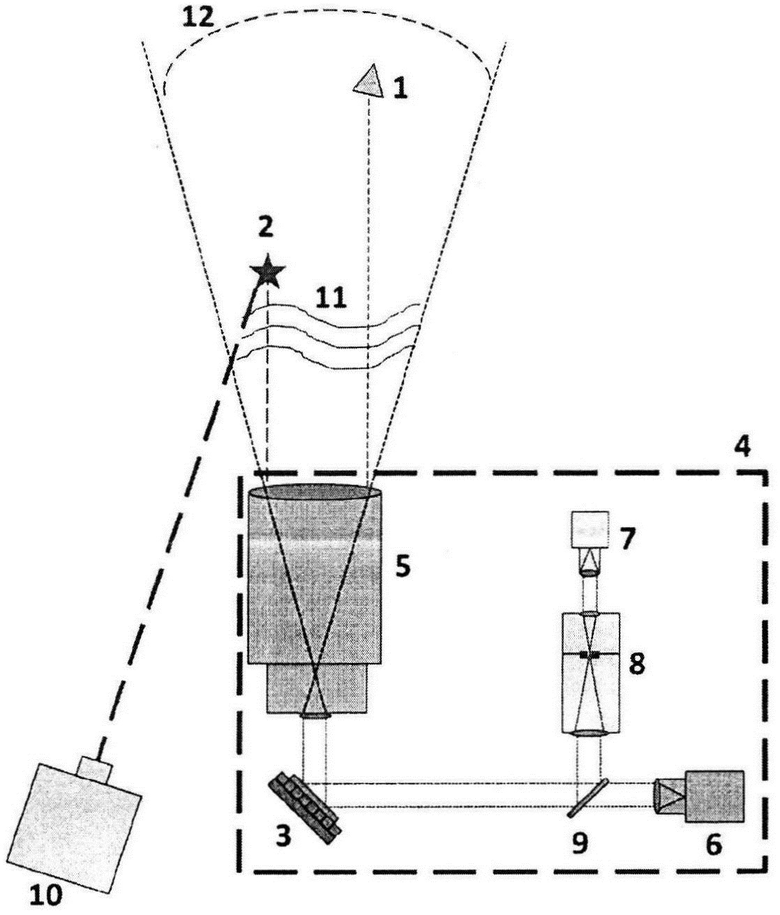
Способ компенсации атмосферных искажений, вносимых турбулентной атмосферой в оптический сигнал, получаемый от наблюдаемого космического тела (далее КТ), заключающийся в том, что осуществляют визуализацию и автосопровождение КТ, формируют на заданном упреждении в поле зрения системы визуализации искусственный опорный источник - натриевую оптическую звезду (далее НЗ) с помощью лазера, направляют регистрируемый оптический сигнал от КТ и НЗ на адаптивную оптическую систему (далее АОС), и через селективный оптический элемент отводят сигнал НЗ на регистратор, при этом передача сигнала происходит в два этапа, на первом из которых сигнал проходит через АОС без внесения ею дополнительных искажений, а на втором этапе с помощью АОС по определенному алгоритму вносят поправки в волновой фронт регистрируемого сигнала, организуют замкнутый цикл работы АОС по обратной связи с помощью сигнала НЗ на регистраторе, затем о выполнении компенсации судят по достижению плоского волнового фронта, отличающийся тем, что на втором этапе передачи сигнала компенсацию искажений осуществляют путем апертурного зондирования НЗ с помощью АОС, работающего по алгоритму нахождения максимума целевой функции, которой соответствует число зарегистрированных фотонов, прошедших через диафрагму дифракционного размера, при котором обратная связь осуществляется по регистратору, в качестве которого применяют счетчик фотонов, а в качестве рабочего сигнала принимают число фотонов, причем о достижении плоского волнового фронта судят по максимуму целевой функции.
| ФАЗОВЫЙ МОДУЛЯТОР ВОЛНОВОГО ФРОНТА | 1995 |
|
RU2106670C1 |
| US 8686331 B2, 01.04.2014 | |||
| US 7232999 B1, 19.06.2007. | |||

