Изобретение относится к области оптического приборостроения и может быть использовано в лазерных системах локации, доставки энергии на космические аппараты, лидарах и других лазерных системах различного назначения с адаптивным управлением фазовым фронтом методом апертурного зондирования.
Из существующего уровня техники известен способ компенсации атмосферных искажений, вносимых турбулентной атмосферой в оптический сигнал, получаемый от наблюдаемого космического тела [1]. В способе с помощью лазера формируют на заданном упреждении в поле зрения системы визуализации, искусственный опорный источник - натриевую оптическую звезду (НЗ), направляют регистрируемый оптический сигнал от КТ (космического тела) и НЗ на адаптивную оптическую систему (АОС), через селективный оптический элемент отводят часть сигнала НЗ на регистратор. В качестве регистратора применяют счетчик фотонов прошедших через диафрагму дифракционного размера, сигнал с которого является управляющим АОС.
Данная адаптивная система не может управлять лазерным пучком. Она предназначена для построения исправленного изображения астрономических объектов и космических тел (КТ), близкого к дифракционному пределу, с использованием искусственного источника (лазерная опорная звезда или НЗ).
Известно также устройство управления лучом и метод управления мощным лазерным пучком [2] в котором применен метод обращения волнового фронта (ОВФ) на основе свойства нелинейного сопряжения оптической фазы (фазово-сопряженные зеркала в лазерном предусилителе и лазерном усилителе мощного излучения) и жидкокристаллические ОРА (ОРА - optical phase array, аналог деформируемого адаптивного зеркала), работающие при низких уровнях мощности, что позволяет избежать ограничений на мощность излучения, которые накладываются при установке адаптивного зеркала в канале мощного излучения. В устройстве при работе используется отдельный источник излучения (Master Oscillator) для освещения цели. В данном патенте реализован метод двойного преобразования предискажений с применением метода ОВФ, который предложен в монографии [3].
Основным недостатком данного устройства компенсации искажений мощного лазерного излучения является то, что для его работы требуется отражающий объект, а оно применимо только для режима фокусировки излучения на цель, а при более широкой подсветке объекта захватывается область с максимальной интенсивностью. То есть для замыкания контура адаптивной обратной связи (АОС) необходимо применять независимый удаленный от системы формирования и наведения (СФН) объект.
Наиболее близким по технической сущности и назначению к заявляемому изобретению, является адаптивная система апертурного зондирования компенсации искажений волнового фронта в лазерных системах [4]. В адаптивной системе применен метод апертурного зондирования с соосным распространением основного излучения с заданным волновым фронтом, источника зондирующего излучения, фокусированного на заданной дальности, приемом обратно рассеянного атмосферным аэрозолем излучения зондирующего источника. Оптическая приемная система принимает рассеянное излучение соосно с излучениями, направляемыми в атмосферу, и строит изображение области фокусировки зондирующего излучения, которое разбивается на 2 канала. В первом канале измеряют смещение центра тяжести этого изображения относительно оптической оси, вырабатывают сигнал управления наклоном по обеим координатам плоского зеркала, которое компенсирует эти отклонения, вызванные нестабильностью оптических элементов, и поддерживает оси совмещенных лазерных пучков с осью оптической системы формирования и наведения. Во втором канале на оптической оси в области изображения принимают излучение через диафрагму заданного диаметра, вырабатывают сигналы управления адаптивным зеркалом по специальной программе, которые компенсируют искажения волнового фронта в зондирующем пучке и поддерживают его фокусировку на заданном расстоянии, и, как следствие, заданный волновой фронт основного излучения.
Адаптивная система (АОС) включает 2 блока, выполняющих разные функции и оптически связанные между собой: блок лазеров (БЛ) и блок формирования и компенсации (БФК).
Блок лазеров (БЛ) включает основной лазер (лазер1) длиной волны λ1, излучение которого, оптически и соосно через оптическую систему (далее ОС-1) соединен с первым входом блока объединения (далее БО), например, дихроичная пластина или дифракционное зеркало, и непрерывный или частотно-импульсный зондирующий лазер (лазер 2) длиной волны λ2, оптически и соосно через вторую оптическую систему (далее ОС-2) с вторым входом блока объединения БО лазеров. Совмещенные соосно излучения лазеров с выхода БО оптически и соосно соединены с входом плоского зеркала (далее УЗ), управляемое по углу по обеим координатам, входящее в состав БФК. С выхода УЗ совмещенные соосно излучения лазеров оптически и соосно через адаптивное зеркало (далее АЗ), оптическую систему формирования и наведения (далее СФН), направляют соосно в атмосферу излучение основного лазера длиной волны с заданным волновым фронтом, а излучение зондирующего лазера - фокусировано на заданной трассе. Рассеянное в обратном направлении атмосферой, из области фокусировки оптически и соосно с СФН направляют через приемную оптическую систему (далее ПОС), светофильтр (далее СФ2) на длину волны зондирующего излучения, светоделитель (далее СВД). Излучение с первого выхода СВД через апертурную диафрагму принимается фотоприемным блок (далее ФП), выход которого через последовательно соединенные блок селективного усилителя и блок детектора с фильтром нижних частот, блок обработки сигнала и управления (далее БОУ), соединен с управляющими входами адаптивного зеркала (АЗ), излучение с второго выхода СВД принимается блоком измерения центра тяжести (далее БИЦ2-1) выход которого соединен с управляющими входами плоского управляемого зеркала УЗ. причем апертурная диафрагма и вход БИЦ2-1 установлены в плоскости изображения ПОС области фокусировки зондирующего излучения, непрерывный лазер модулирован по амплитуде синусоидой или импульсами, а селективный усилитель настроен на частоту модуляции или частоту следования импульсов.
Недостаток данной адаптивной системы апертурного зондирования компенсации искажений волнового фронта состоит в том, что отсутствует компенсация некоррелированных между собой флуктуаций (дрейф) направления оси лазерных пучков на выходе источников и температурная нестабильность оптических систем, в частности, при достаточно большой мощности основного излучения, что приводит к рассогласованию оптических осей зондирующего и основного пучков на выходе блока согласования и далее в атмосферу. Адаптивная система компенсирует отклонение зондирующего пучка от оси СФН, а основной пучок отклоняется от оси СФН на угол рассогласования.
Техническим результатом заявляемого изобретения является повышение качества работы адаптивной системы путем компенсации углового рассогласования направления оптических осей зондирующего и основного излучения на выходе лазеров, тепловой нестабильности элементов оптических систем до выхода из блока объединения и исключения их влияния при дальнейшем распространении в оптической системе и атмосфере.
Технический результат достигается, тем, что в блок лазеров БЛ известной адаптивной системы дополнительно включены два управляемых по углам плоских зеркала (УЗ), два блока измерения центра тяжести (БИЦ), блок разделения БР, дополнительная оптическая система (ДОС), два светофильтра СФ и блок вычисления (БВ). Причем блок объединения БО направляет часть основного излучения на выход БО и пропускает меньшую часть через ДОС, БР и СФ на первый измеритель БИЦ, а излучение зондирующего излучения пропускает на выход БО и частично отражает через ДОС, БР и СФ на другой БИЦ.
Эти блоки формируют 2 контура компенсации отклонений осей лазеров от заданного направления. Один контур компенсации отклонения оси зондирующего излучения включает оптический контур выход ОС-2, первое УЗ, ДОС, БР, первое СФ и вход первого БИЦ, выход которого соединен с управляющими входами первого УЗ. Второй контур компенсации отклонения оси основного излучения включает оптический выход ОС-1, второе УЗ, ДОС, БР, второе СФ и вход второго БИЦ, выход которого через первый вход блока БВ соединен с управляющими входами УЗ а второй вход БВ соединен с выходом первого БИЦ. Введение двух контуров компенсации, связанных между собой, позволяет совместить оптическую ось основного излучения с оптической осью зондирующего, относительно положения которой, работает система компенсации БФК, обеспечивая достижение технического результата.
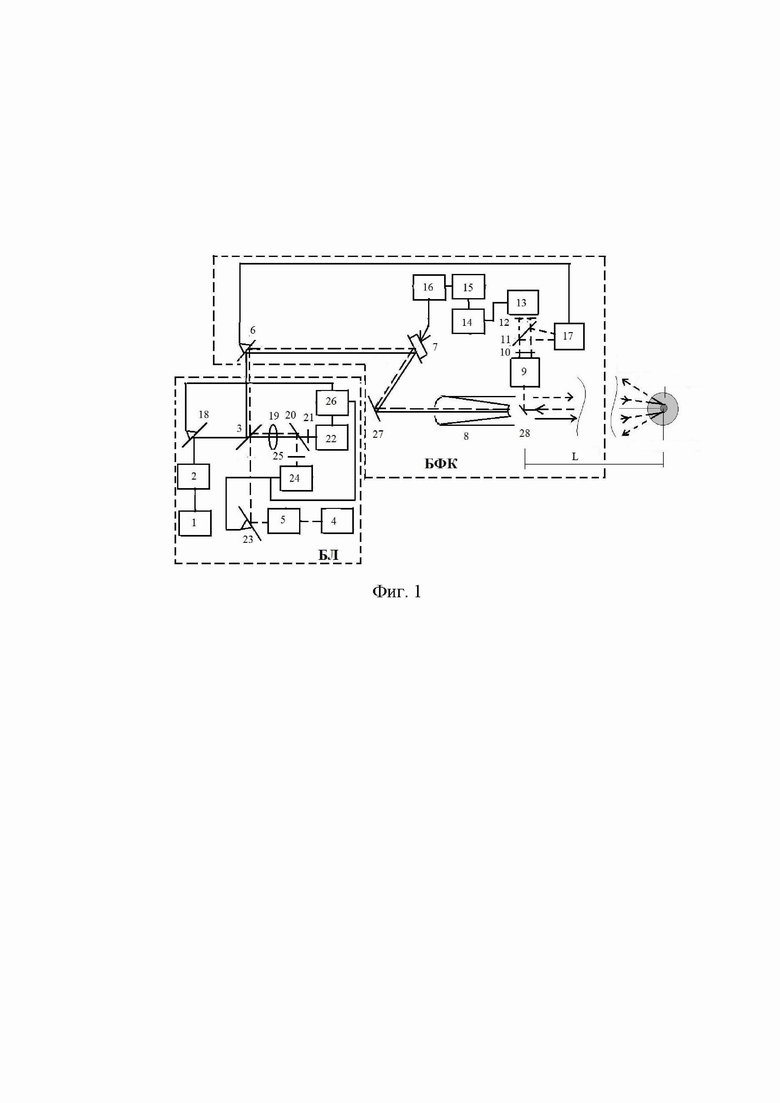
Предлагаемое изобретение представлено на фиг. 1, где позициями обозначены следующие элементы: БФК - блок формирования и наведения и БЛ - блок лазеров, 1- лазер основного излучения длиной волны 1, 2 - оптическая система (ОС-1), 3 - блок объединения (БО), 4 - источник лазерного зондирующего излучения длиной волны 2, 5 - оптическая система (ОС-2), 6, 18, 23 - управляемые плоские зеркала УЗ (УЗ1, УЗ2 и УЗ3), 7 - адаптивное зеркало (АЗ), 8 - система формирования и наведения (СФН), 9 - приемная оптическая система (ПОС), 10, 25 - светофильтры на длину волны зондирующего излучения 2 (СФ2-1, СФ2-3),11 - светоделитель (СВД), 12 - апертурная диафрагма, 13 - фотоприемный блок (ФП), 14 - селективный усилитель, 15 - детектор, 16 - блок обработки сигнала и управления адаптивным зеркалом (БОУ), 17, 22, 24 - блоки измерения центра тяжести БИЦ (БИЦ2-1, БИЦ1-2, БИЦ2-3), 19 - дополнительная оптическая система (ДОС), 20 - блок разделения (БР), 21 - светофильтр на длину волны основного излучения 1 (СФ1-2), 26 - блок вычисления (БВ). 27, 28 - плоские зеркала, L - расстояние фокусировки зондирующего излучения в атмосфере.
Адаптивная система апертурного зондирования отличающаяся тем, что в блок БЛ дополнительно включены два плоских зеркала, управляемые по углу далее УЗ2(18) и УЗ3 (23), блок разделения далее БР (20), два блока измерения центра тяжести (22, 23), далее БИЦ1-2 (22) и БИЦ2-3 (24), два светофильтра на длины волн основного лазера далее СФ1-2 (21) и зондирующего СФ2-3 (25), дополнительная оптическая система далее ДОС (19), и блок вычисления далее БВ (26). Причем блок объединения БО (3) дополнительно к объединению оптических осей излучения лазеров выполнен частично пропускающим/отражающим излучение одного лазера и отражающим/пропускающим другого на блоки измерения центров тяжести (БИЦ). Вход управляемого зеркала УЗ2 (18), оптически и соосно с выходом оптической системы основного лазера ОС1 (2), а выход через первый вход БО (3) и первый выход БО с входом управляемого зеркала УЗ1 блока БФК, а через второй выход БО и последовательно оптически и соосно связанные ДОС (19), БР (20) и СФ1-2 (21) с входом БИЦ1-2 (22). Выход БИЦ1-2 соединен через первый вход блока вычисления БВ (26) с управляющими входами зеркала УЗ2 (18). Управляемое зеркало УЗ3 (23) входом оптически и соосно связано с выходом оптической системы зондирующего лазера ОС2 (5), а выходом через второй вход БО (3) и первый выход БО с входом управляемого зеркала УЗ1 блока БФК, а через второй выход и последовательно оптически и соосно связанные ДОС (19), БР (20) и СФ2-3 (25) с входом БИЦ2-3 (24). Выход БИЦ2-3 соединен с управляющими входами зеркала УЗ3 (23) и вторым входом блока вычисления БВ (26). Причем оптические входы блоков БИЦ1-2 и БИЦ2-3 устанавливают в плоскости изображения излучения соответствующего лазера, построенного ДОС.
Адаптивная система апертурного зондирования с учетом поставленного технического решения работает следующим образом. Излучение основного лазера (1) с выхода оптической системы ОС1 (2) оптически и соосно через плоское управляемое зеркало УЗ2 (18), первый вход блока объединения БО (3) и первый выход БО направляют большую часть излучения через плоское управляемое зеркало УЗ1 (6), адаптивное зеркало (7) и СФН (8) в атмосферу. Меньшую часть излучения лазера через второй выход, (например, частично прозрачный) блока объединения БО (3), оптически и соосно направляют через последовательно соединенные ДОС (19), БР (20) и светофильтр на длину волны основного лазера СФ1-2 (21) на оптический вход БИЦ1-2. Выход блока измерения координат изображения основного излучения БИЦ1-2 соединен с первым входом блока вычисления БВ (26), а выход блока измерения координат изображения зондирующего пучка БИЦ2-3 со вторым входом БВ. Блок БВ вырабатывает сигнал отклонения оси основного излучения от оси зондирующего, который подается на управляющие входы управляемого зеркала УЗ2 (18) и компенсируя это отклонение совмещает ось основного излучения с осью зондирующего на выходе БО. Излучение зондирующего лазера (4) оптически и соосно с выхода оптической системы ОС2 (5), плоское управляемое зеркало УЗ3 (23), второй вход блока БО (3) и первый выход БО направляют большую часть излучения через плоское управляемое зеркало УЗ1 (6), адаптивное зеркало (7) и СФН (8) в атмосферу. Меньшую часть излучения через второй выход (например, частично отражающий) блока объединения БО (3), оптически и соосно направляют через последовательно соединенные ДОС (19), БР (20) и светофильтр на длину волны зондирующего лазера СФ2-3 (25) на оптический вход БИЦ2-3 (24). Сигнал с выхода БИЦ2-3, управляя плоским зеркалом УЗ3 (23), компенсирует смещение оптической оси с выхода зондирующего лазера относительно заданного, который определен при настройке изделия. Причем оптические входы БИЦ1-2 и БИЦ2-3 установлены в плоскости изображения соответствующего лазера, построенного ДОС. Соосно совмещенные излучения лазеров с выхода БО оптически и соосно направляют в блок БФК и через управляемое зеркало У31 (6), адаптивное зеркало АЗ (7), плоское зеркало 27 и систему формирования и наведения СФН (8) направляют в атмосферу. Причем излучение зондирующего лазера фокусируют на заданном расстоянии, а основному лазеру задают требуемый волновой фронт. Рассеянное назад излучение зондирующего лазера оптически и соосно с осью СФН зеркалом 28 направляют через приемную оптическую систему ПОС (9), светофильтр на длину волны зондирующего излучения СФ2-1 (10), первый выход светоделителя СВД (11), апертурную диафрагму (12) на вход фотоприемного блока ФП (13) и через другой выход светоделителя на вход блока измерения центра тяжести изображения БИЦ2-1 (17). Причем апертурную диафрагму (12) и оптический вход БИЦ2-1 (17) устанавливают в изображении фокального пятна построенного ПОС из области фокусировки зондирующего излучения. Измеренные координаты центра тяжести поступают на управляемое по углам плоское зеркало (6), которое компенсирует возникающие углы рассогласования между совмещенными оптическими осями лазеров и осью АЗ - СФН поддерживает изображение фокального пятна зондирующего на входе блоков ФП (13), (17). Это обеспечивает совмещение оптических осей лазерных пучков с осью СФН возникающих при распространении в атмосфере и тепловой разъюстировки оптических элементов блока БФК. Из сигнала с фотоприемного блока ФП (13), который пропорционален интенсивности излучения прошедшего через диафрагму (12), селективный усилитель (14) выделяет часть сигнала пропорциональную частоте модуляции зондирующего лазера, который детектируется детектором (15), сглаживается фильтром и поступает в блок обработки сигнала и управления адаптивным зеркалом БОУ (16). БОУ, по заданной программе, вырабатывает управляющие сигналы, поступающие на АЗ (7) для корректировки волнового фронта. Программа БОУ, вырабатывая сигналы управления элементами АЗ, достигает максимального значения, непрерывно сравнивая результат работы элементов зеркала с предыдущим. Процесс управления продолжается, непрерывно поддерживая максимум сигнала с фотоприемного блок, вырабатывая сигналы управления элементами АЗ, достигает максимального значения, решая поставленную задачу компенсации смещений за счет тепловой нестабильности оптических элементов и влияния атмосферы в блоке ФПК и в атмосфере.
Компенсация углового рассогласования направления оптических осей зондирующего и основного излучения на выходе лазеров, тепловой нестабильности элементов оптических систем до выхода из блока объединения исключает необходимость их компенсации в блоке БФК, что позволяет повысить качество работы адаптивной системы.
Список используемых источников:
1. Патент RU 2737230.
2. Патент US 20030062468 A1, 2003.
3. М.А. Воронцов, В.И. Шмальгаузен. Принципы адаптивной оптики. М.: Наука, 1975. 335с.
4. RU 2791833 C1, 2022.
5. О.И. Адаптивные оптические системы коррекции наклонов. Резонансная адаптивная оптика / 5. Шанин Москва: Техносфера, 2013. 296 с. ISBN 978-5-94836-347-9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система апертурного зондирования компенсации искажений волнового фронта в лазерных системах | 2022 |
|
RU2791833C1 |
| Адаптивная оптическая система | 1983 |
|
SU1097970A1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2514162C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| ЛАЗЕРНОЕ УСТРОЙСТВО КОНТРОЛЯ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2012 |
|
RU2502647C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| АДАПТИВНАЯ ОПТИЧЕСКАЯ СИСТЕМА ФОКУСИРОВКИ КОГЕРЕНТНОГО ИЗЛУЧЕНИЯ НА ПРОТЯЖЕННОМ ОБЪЕКТЕ | 1991 |
|
RU2020521C1 |
Изобретение относится к области оптического приборостроения. В известную адаптивную систему в блок лазеров дополнительно включены два управляемых плоских зеркала УЗ, два блока измерения центра тяжести БИЦ, блок разделения БР, дополнительная оптическая система (ДОС), два светофильтра СФ и блок вычисления БВ, которые формируют два контура компенсации угловых отклонений оптических осей лазерных пучков. БО выполнен с дополнительным вторым выходом. Первый контур компенсации отклонения оси зондирующего излучения включает выход ОС-2, УЗ-3, ДОС, БР, СФ и вход первого БИЦ, выход которого соединен с управляющим входом УЗ. Второй контур компенсации отклонения оси основного излучения включает оптический выход ОС-1, вторые блоки УЗ, ДОС, БР, второй СФ и вход БИЦ, выход которого через первый вход блока БВ соединен с управляющим входом УЗ, а второй вход БВ соединен с выходом первого БИЦ. Технический результат - повышение точности работы адаптивной системы. 1 ил.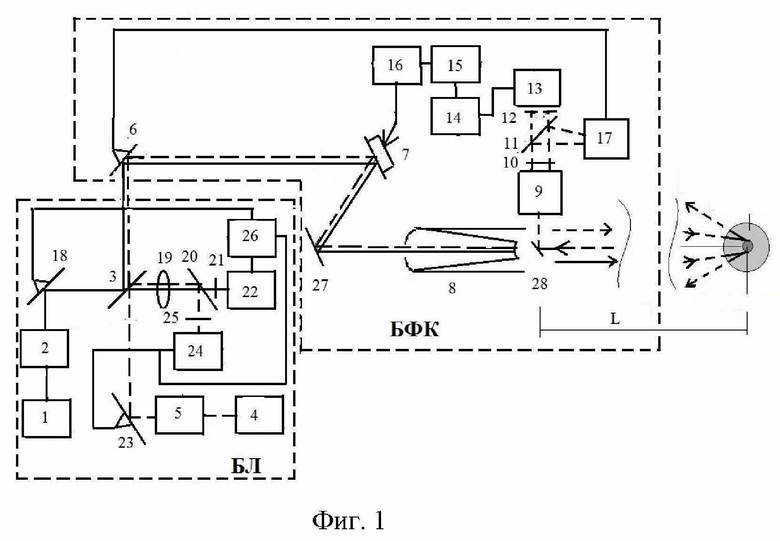
Адаптивная система апертурного зондирования компенсации искажений волнового фронта включает два крупных блока, связанные между собой оптически, блок формирования и компенсации (далее БФК) и блок лазеров (далее БЛ), включающий основной лазер длиной волны 1, излучение которого, оптически и соосно через оптическую систему (далее ОС-1), первый вход блока объединения (далее БО), например, дихроичная пластина или дифракционное зеркало, направлено на выход блока БО, и непрерывный или частотно-импульсный зондирующий лазер длиной волны 2, излучение которого оптически и соосно через оптическую систему (далее ОС-2), второй вход БО направлено на выход БО соосно с излучением основного лазера, совмещенные соосно излучение лазеров оптически и соосно направляют в атмосферу через управляемое по двум координатам зеркало (УЗ1), адаптивное зеркало (далее АЗ) и оптическую систему формирования и наведения (далее СФН), причем основное излучение сформировано с заданным волновым фронтом, а излучение зондирующего лазера фокусировано на заданной дальности, излучение зондирующего источника, рассеянное в обратном направлении атмосферой из области фокусировки, оптически и соосно с СФН, например, плоским зеркалом, установленным перед контррефлектором СФН, направляют через приемную оптическую систему (далее ПОС), светофильтр на длину волны зондирующего излучения (далее СФ2-1) на светоделитель (далее СВД), первый выход которого через апертурную диафрагму оптически и соосно связан с входом фотоприемного блока (далее ФП), выход которого соединен через последовательно соединенные блок селективного усилителя, блок детектора с фильтром нижних частот с входом блока обработки сигнала и управления адаптивным зеркалом (далее БОУ), выход которого соединен с управляющими входами АЗ, второй выход СВД оптически и соосно связан с входом блока измерения центра тяжести БИЦ2-1, выход которого соединен с входами управления управляемого зеркала УЗ1, причем непрерывный лазер модулирован по амплитуде синусоидой или импульсами, а селективный усилитель настроен на частоту модуляции, апертурная диафрагма и вход БИЦ2-1 установлены в плоскости изображения области фокусировки зондирующего излучения, построенного ПОС, отличающаяся тем, что в блок лазеров БЛ дополнительно введены два управляемых по углам плоских зеркала (УЗ2, УЗ3), дополнительная оптическая система (далее ДОС), блок разделения (далее БР), два светофильтра (далее СФ2-2, СФ1-3), два блока измерения центра тяжести БИЦ (БИЦ1-2, БИЦ2-3), которые формируют два контура компенсации отклонения оптических осей излучения на выходе лазеров, а БО выполнен пропускающим/отражающим излучение основного лазера и отражающим/пропускающим зондирующее, первый контур включает установленное между ОС-1 и БО и управляемое по углам плоское зеркало УЗ2, вход которого оптически и соосно соединен с выходом оптической системы ОС-1, а выход направляет часть излучения основного лазера через блок объединения БО на выход БО, другую часть излучения этого лазера, через частично прозрачный блок БО, оптически и соосно последовательно соединенные дополнительные блоки ДОС, БР и светофильтр - на длину волны основного лазера, СФ1-2 направляют на вход БИЦ1-2, выход которого соединен с первым входом блока вычисления БВ, второй вход которого соединен с выходом блока измерения координат зондирующего пучка БИЦ2-3, а выход - с управляющими входами УЗ2, второй контур включает установленное между ОС-2 и БО и управляемое по углам плоское зеркало УЗ3, вход которого оптически и соосно с соединен выходом оптической системы ОС-2, а выход направляет часть излучения зондирующего лазера через блок объединения БО на выход БО соосно с излучением основного лазера, другую часть излучения этого лазера, через частично отражающий блок БО, оптически и соосно последовательно соединенные дополнительные блоки ДОС, БР и светофильтр - на длину волны зондирующего лазера, СФ2-3 направляют на вход БИЦ2-3, выход которого соединен с управляющим входом зеркала УЗ3 и вторым входом блока вычисления БВ, причем оптические входы БИЦ1-2 и БИЦ2-3 установлены в плоскости изображения соответствующего лазера, построенного ДОС, а соосно совмещенные излучения лазеров с выхода БО направляют на управляемое зеркало УЗ1 блока БФК.
| Адаптивная система апертурного зондирования компенсации искажений волнового фронта в лазерных системах | 2022 |
|
RU2791833C1 |
| СПОСОБ КОМПЕНСАЦИИ АТМОСФЕРНЫХ ИСКАЖЕНИЙ, ВНОСИМЫХ ТУРБУЛЕНТНОЙ АТМОСФЕРОЙ В ОПТИЧЕСКИЙ СИГНАЛ, ПОЛУЧАЕМЫЙ ОТ НАБЛЮДАЕМОГО КОСМИЧЕСКОГО ТЕЛА | 2020 |
|
RU2737230C1 |
| Лидарный комплекс | 2016 |
|
RU2650776C1 |
| US 10536238 B2, 14.01.2020 | |||
| US 7232999 B1, 19.06.2007. | |||

