Уровень техники
Настоящее раскрытие, в целом, относится к системам и способам динамичного управления сбором данных на основе датчиков в транспортных средствах. Более конкретно и без ограничения сказанного, раскрытые варианты осуществления относятся к системам и способам динамического регулирования сигналов и параметров обработки сигналов, основываясь на непрерывно меняющихся состояниях данных.
Понимание работы транспортного средства может потребовать большого объема информации и мощности для обработки этой информации. Эта информация, помимо прочего, может содержать данные о текущем состоянии транспортного средства (например, его положении, скорости, ускорении и т.д.), информацию о текущих дорожных условиях (например, погода, трафик, дорожные повороты и т.д.), и информацию о водителе (например, прошлые данные о вождении водителя, его психическое состояние и т.д.). Традиционные системы сбора данных не способны надежным способом обеспечивать эффективные способы сбора, обработки и использования всей этой информации. Поэтому такие системы в вычислительном отношении могут быть неэффективны или могут жертвовать скоростью за счет точности.
Раскрытие сущности изобретения
Раскрытые варианты осуществления содержат системы и способы динамичного управления сбором данных, основанным на датчиках. Раскрытые варианты осуществления могут непрерывно и динамично регулировать типы собранных сигналов датчиков, их соответствующие частоты выборки и алгоритмы обнаружения событий, чтобы модифицировать сбор данных в реальном времени или почти в реальном времени. Раскрытые варианты осуществления могут регулировать эти параметры, основываясь на их изменениях, чтобы управлять обновлением переменных во времени. В некоторых вариантах эти управляемые переменные могут основываться на информации, относящейся к транспортному средству, дороге, окружающей среде, водителю или другим факторам.
Раскрытые варианты осуществления содержат, например, систему динамичного управления, основанного на сборе данных датчиков транспортных средств. Система может содержать память, хранящую набор команд, и один или более процессоров, выполненных с возможностью исполнения установленных команд для выполнения одной или более операций. Операции могут содержать прием набора сигналов, ассоциированных с набором датчиков транспортного средства, причем набор сигналов ассоциирован с набором частот выборки. Операции могут также содержать применение набора полосовых фильтров к набору сигналов, чтобы создать набор отфильтрованных сигналов. Операции могут также содержать обнаружение возникновения события, сравнивая оценку события, основанную на сравнении набора отфильтрованных сигналов, с порогом события. Операции могут также содержать вывод данных о событии в центр управления, когда оценка события превышает порог события, причем по меньшей мере одно из: набора сигналов, набора частот выборки, набора полосовых фильтров, оценки события или порогового события, динамично регулируется, основываясь на изменении в наборе переменных управления.
Раскрытые варианты осуществления также содержат, например, способ динамичного управления, основанный на сборе данных датчиками транспортного средства, содержащий нижеследующие операции, выполняемые посредством одного или более процессоров, ассоциированных с устройством, находящимся внутри транспортного средства. Способ может содержать прием набора сигналов, ассоциированных с набором датчиков транспортного средства, причем набор сигналов ассоциирован с набором частот выборки. Способ может также содержать применение набора полосовых фильтров к набору сигналов для создания набора отфильтрованных сигналов. Способ может также содержать обнаружение возникновения события посредством сравнения оценки события, основанной на наборе отфильтрованных сигналов, с пороговым событием. Способ может также содержать вывод данных события в центр управления, когда оценка события превышает пороговое событие, причем по меньшей мере одно из: набора сигналов, набора частот выборки, набора полосовых фильтров, оценки события или порогового события, динамично регулируется, основываясь на изменении набора переменных управления.
Раскрытые варианты осуществления также содержат, например, физический, непереносной считываемый компьютером носитель (память), хранящий команды, которые, когда выполняются по меньшей мере одним процессором, заставляют по меньшей мере один процессор выполнять способ динамичного управления, основываясь на сборе данных датчиков транспортного средства. Способ может содержать прием набора сигналов, ассоциированных с набором датчиков транспортного средства, причем набор сигналов ассоциирован с набором частот выборки. Способ может также содержать применение набора полосовых фильтров к набору сигналов, чтобы создать набор отфильтрованных сигналов. Способ может также содержать обнаружение возникновения события, сравнивая оценку события, основанную на наборе отфильтрованных сигналов, с пороговым событием. Способ может также содержать вывод данных события в центр управления, когда оценка события превышает пороговое событие, причем по меньшей мере одного из: набора сигналов, набора частот выборки, набора полосовых фильтров, оценки события или порогового события, динамично регулируется, основываясь на изменении в наборе переменных управления.
Дополнительные признаки и преимущества раскрытых вариантов осуществления будут частично изложены дальше в описании, а частично станут очевидны из описания или могут быть изучены при практическом применении раскрытых вариантов осуществления. Признаки и преимущества раскрытых вариантов осуществления будут реализованы и достигнуты посредством элементов и их сочетаний, в частности, указанных в приложенной формуле изобретения.
Следует понимать, что как изложенное выше общее описание, так и последующее подробное описание являются лишь примерами и объяснениями и не являются ограничением раскрытых вариантов осуществления, как они заявлены.
Сопроводительные чертежи составляют часть настоящего описания. Чертежи поясняют несколько вариантов осуществления настоящего раскрытия и вместе с описанием служат для объяснения принципов раскрытых вариантов осуществления, как они изложены в сопутствующей формуле изобретения.
Краткое описание чертежей
Фиг. 1 - примерная системная среда для реализации вариантов осуществления, совместимая с раскрытыми вариантами осуществления.
Фиг. 2 - примерная компьютерная система для реализации процессов, совместимая с раскрытыми вариантами осуществления.
Фиг. 3 - блок-схема последовательности осуществления операций примерного процесса сбора и обработки данных транспортного средства, которые динамично регулируются, совместимая с раскрытыми вариантами осуществления.
Фиг. 4 - блок- схема устройства примерного адаптивного управления и потока данных, совместимая с раскрытыми вариантами осуществления.
Фиг. 5 - блок-схема последовательности выполнения операций примерного процесса с полосовыми фильтрами, совместимая с раскрытыми вариантами осуществления.
Фиг. 6 - блок-схема последовательности выполнения операций примерного процесса обнаружения событий, совместимая с раскрытыми вариантами осуществления.
Фиг. 7 - блок-схема последовательности выполнения операций примерного процесса подтверждения события, совместимая с раскрытыми вариантами осуществления.
Фиг. 8 - блок-схема последовательности выполнения операций примерного процесса формирования граничных условий и индексов опасности, совместимая с раскрытыми вариантами осуществления.
Осуществление изобретения
Раскрытые варианты осуществления относятся к системам и способам динамичного управления сбором данных на основе датчиков транспортного средства. Раскрытые варианты осуществления могут динамично управлять сигналами, принятыми от датчиков, ассоциированных с транспортным средством, и их соответствующими частотами выборки, основываясь на переменных управления, управляемых с помощью обработки принятых сигналов, и других внешних процессах. Раскрытые варианты осуществления могут применять к сигналам полосовые фильтры, так чтобы полосы пропускания фильтрации динамично регулировались в реальном времени или примерно в реальном времени. Кроме того, раскрытые варианты осуществления могут применять алгоритмы обнаружения событий, которые динамично регулируются по ходу дела, чтобы учитывать текущие дорожные условия, обнаруженные события, изменяющиеся опасности и воздействия, способные нанести вред, поведение водителя и другие соображения. Раскрытые варианты осуществления могут модифицировать эти схемы обнаружения событий, динамично регулируя типы собранных сигналов, математические веса, связанные с сигналами, параметры, сообщающие соответствующие пороги обнаружения событий, и т.п. Раскрытые варианты осуществления могут также подтверждать обнаруженные события, чтобы гарантировать высокую точность данных, дополнительная регулируя входные сигналы, полосы пропускания, веса, пороги и т.д. Кроме того, раскрытые варианты осуществления обеспечивают системы и способы предоставления данных сигналов, данных отфильтрованных сигналов, обнаруженных событий и других параметров в центр управления для дополнительной обработки. Раскрытые варианты осуществления могут также обеспечивать системы и способы обработки принятых данных в центре управления, чтобы предоставлять соответствующие данные, информацию и команды удаленным устройствам, осуществляющим связь с датчиками, для дополнительной обработки.
Динамичное регулирование сбора данных, основанного на датчиках транспортного средства, может обеспечивать одно или более технических преимуществ. В контексте обработки сигналов, например, можно доказать предпочтительность выборки меньшего набора сигналов от датчиков транспортного средства, чтобы повысить вычислительную эффективность, не влияя на точность. Обработка или хранение данных, связанных с ненужными сигналами, или другой информации могут расходовать вычислительные ресурсы на данные, обладающие незначительной важностью. Подобные преимущества могут возникать в результате выборки сигналов с пониженными или более конкретизированными частотами выборки. Дополнительно, использование определенных сигналов и соответствующих частот выборки может повысить эффективность передачи данных и обработки данных в других компьютерных системах. В другом примере динамичное управление параметрами обнаружения событий, основанное на датчиках, может повысить точность и эффективность этих алгоритмов. Такие схемы динамично регулируемого обнаружения событий могут давать выгоду, используя выборку наиболее подходящих сигналов с наиболее подходящей частотой. Кроме того, динамичное регулирование порогов и входных параметров этих процессов в ответ на события в реальном времени может повысить их эффективность и надежность. Раскрытые варианты осуществления обеспечивают, по меньшей мере, эти технические преимущества, динамично управляя сигналами выборки, частотами выборки и модифицируя параметры схем обнаружения и подтверждения событий на основе непрерывного обновления данных.
Далее будет сделана подробная ссылка на варианты осуществления настоящего раскрытия, примеры которого показаны на сопроводительных чертежах. Везде, где возможно, одни и те же ссылочные позиции будут использоваться повсеместно на чертежах для указания одних и тех же или схожих частей.
На фиг. 1 показана примерная системная среда 100 для реализации систем и способов, совместимая с раскрытыми вариантами осуществления. В некоторых вариантах среда 100 может содержать одно или более устройств адаптивного управления (например, устройство 112 адаптивного управления), средствами связи соединенных с одним или более датчиками 114, связанными с транспортным средством 110. Среда 100 может содержать одну или более центральных систем управления (например, систему 132 управления), которые могут быть связаны с одним или более центрами управления (например, с центром 130 управления). Среда 100 может также содержать одну или более внешних компьютерных систем (например, внешняя система 142), которые могут быть связаны с одним или более внешними объектами (например, внешний объект 140). Одна или более сетей связи (например, сеть 120 связи) могут средствами связи соединяться с одним или более компонентами среды 100.
Устройство 112 адаптивного управления содержит одно или более компьютерных устройств, устройств обработки данных или устройств обработки сигналов (например, компьютерное устройство 200, описанное со ссылкой на фиг. 2) для сбора, получения, обработки, хранения и/или передачи информации. В некоторых вариантах осуществления, например, устройство 112 адаптивного управления содержит микросхему с аппаратными средствами и/или с работающими на них приложениями для осуществления процессов, совместимых с раскрытыми вариантами осуществления. Устройство 112 адаптивного управления может быть выполнено с возможностью передачи и приема данных или сигналов другим компьютерным системам через сеть связи, такую как сеть 120 связи. Устройство 112 адаптивного управления может быть реализовано с одним или более процессорами или компьютерными системами. Устройство 112 адаптивного управления может быть также реализовано с одним или более хранилищами данных для хранения информации, совместимой с описанными ниже вариантами осуществления. В некоторых вариантах устройство 112 адаптивного управления содержит один или более датчиков (например, акселерометр, гироскоп, компас, приемник GNSS и т.д.), хотя такие внутренние датчики не обязательны.
В некоторых вариантах устройство 112 адаптивного управления принимает набор сигналов, кодирующих информацию, поступающую от набора датчиков 114 (например, через систему 120 связи, такую как проводная схема, NFC-соединение и т.д.). Датчики 114 могут измерять любую физическую, временную, оперативную характеристику и/или характеристику окружающей среды, связанные с транспортным средством 110. Например, датчики 114 могут содержать приемник/приемопередатчик GNSS, приемник GPS, акселерометр, гироскоп, термометр, гигрометр, датчик давления, часы, линию CAN или шину CAN (и/или присоединенные к ней компоненты, такие как датчики торможения, датчики двигателя, датчики автоматического поддержания скорости (круиз-контроля), датчики давления воздуха в шинах, аудиосистемы, датчики дверей, навигационные системы и т.д.), любой датчик транспортного средства или микроконтроллер или другие такие датчики. Датчики 114 могут измерять характеристики, внутренние или внешние по отношению к транспортному средству (например, температуру окружающей среды, влажность, атмосферное давление и т.д.), а также характеристики транспортного средства (например, положение, боковое/продольное ускорение, угол места и т.д.).
В некоторых вариантах осуществления устройство 112 адаптивного управления использует сигналы, принимаемые от датчиков 114, чтобы определить или извлечь информацию, связанную с транспортным средством 110. В одном из примеров, например, устройство 112 адаптивного управления может определять внешнюю температуру относительно транспортного средства 110, основываясь на сигналах, принимаемых от термометра. В другом примере устройство 112 адаптивного управления может извлекать скорость транспортного средства 110, основываясь на его положении (получаемом, например, от приемника GNSS), времени (получаемом, например, от часов GNSS) и/или продольном ускорении (получаемом, например, от акселерометра). Устройство 112 адаптивного управления может также подобным способом определять информацию, такую как ускорение транспортного средства, движение транспортного средства на повороте или давление окружающего воздуха и влажность, (например, используя акселерометры, гироскопы, шины CAN, датчики давления и/или гигрометры и т.д.). Устройство 112 адаптивного управления может извлекать, обнаруживать или определять любую такую информацию датчиков 114, совместимую с раскрытыми вариантами осуществления. Любые сигналы датчиков или характеристики транспортного средства, полученные непосредственно из них (например, скорость, ускорение, время, движение на повороте, температура окружающей среды и т.д.), как они используются ниже, могут упоминаться как "сигнал", хотя такое описание используется только для иллюстративных целей и не предназначено служить в качестве ограничения. Например, устройство 112 адаптивного управления может принимать следующие сигналы для проведения процессов, совместимых с раскрытыми вариантами осуществления: скорость, ускорение, торможение, движение на повороте, температура, давление воздуха, влажность, время, положение, продольное ускорение, положение дроссельной заслонки, положение педали тормоза, рыскание, тангаж, крен, дергание, уровни влажности, и любой другой тип сигнала, описанный ниже. Устройство 112 адаптивного управления может также объединять эти сигналы для формирования дополнительных сигналов и/или информации. Например, устройство 112 адаптивного управления может определять манеру вождения водителя, основываясь на положении, ускорении, торможении, движении на повороте и/или сигналах скорости. В другом примере устройство 112 адаптивного управления может подобным способом определять данные окружающей среды (основываясь, например, на температуре, давлении и/или сигналах влажности) или данные аварии (основываясь, например, на положении, ускорении и/или сигналах скорости).
Среда 100 содержит одну или более сетей 120 связи. В некоторых вариантах сеть 120 связи может представлять собой любой тип сети связи или среду цифровой связи для передачи информации между компьютерными устройствами. Например, сеть 120 связи может содержать сотовую сеть, спутниковую сеть, LAN, беспроводную LAN, радиочастотную (RF) сеть, сеть связи в ближнем поле (NFC) (например, сеть WiFi), беспроводную городскую сеть (Metropolitan Area Network (MAN), соединяющую многочисленные беспроводные LAN, линии связи NFC, любые физические проводные соединения или схемы (например, через порт ввода-вывода (I/O), физическую схему и т.д.) и WAN (например, Интернет). В некоторых вариантах осуществления сеть 120 связи может быть защищена с помощью физического шифрования (например, построчного шифрования), посредством запроса информации, которая должна шифроваться, на других компьютерных системах (например, посредством конечного шифрования), и т.п.
В некоторых вариантах сеть 120 связи содержит любую доступную сеть или сети, соединенные по одному или более протоколам связи, в том числе, по протоколу передачи гипертекстов (hypertext transfer protocol, HTTP) и протоколу управления передачей/протоколу Интернет (TCP/IP). Протоколы связи, совместимые с раскрытыми вариантами осуществления, также содержат протоколы, облегчающие передачу данных, используя связь с радиочастотной идентификацией (radio frequency identification, RFID) и/или NFC. В некоторых вариантах сеть 120 связи может также содержать одну или более сетей мобильных устройств, таких как сеть GSM или сеть PCS, позволяющие устройствам (например, устройству 112 адаптивного управления, внешней системе 142 и т.д.) посылать и принимать данные по применимым протоколам связи, в том числе тем, которые описаны здесь.
Среда 100 также содержит одну или более систем 132 управления, выполненных с возможностью обработки, хранения, приема, получения и передачи информации. В некоторых вариантах система 132 управления может представлять собой одну или более компьютерных систем (например, компьютерная система 200, сервер, универсальный компьютер и т.д.) и может быть реализована с помощью аппаратных средств и/или команд программного обеспечения, чтобы выполнять одну или более операций, совместимых с раскрытыми вариантами осуществления (например, как описано со ссылкой на фиг. 2-10). Команды программного обеспечения могут вводиться в единый компьютер, единый сервер или в любое дополнительное или альтернативное компьютерное устройство, ясно понятное любому специалисту в данной области техники. Система 132 управления может также содержать распределенные компьютерные устройства и компьютерные системы и может исполнять команды программного обеспечения на отдельных компьютерных системах и серверах посредством удаленной связи по сети (например, по сети 120 связи). Система 132 управления может содержать многочисленные серверы и может содержать множество серверов или серверное хозяйство, содержащее системы балансирования нагрузки. Система 132 управления может принимать и передавать информацию другим системам внутри среды 100, таким как устройство 112 адаптивного управления или внешняя система 142, через любую применяемую сеть (например, сеть 120 связи). Система 132 управления может также реализовать варианты раскрытых вариантов осуществления, не получая доступ к другим устройствам или сетям связи.
Система 132 управления может содержать один или более репозитариев данных, памятей или хранилищ для хранения и поддержания информации. Компьютерные системы внутри системной среды 100 (например, устройство 112 адаптивного управления, внешняя система 142 и т.д.) могут принимать данные, хранящиеся в них, и передавать данные системе 132 управления, совместимой с раскрытыми вариантами осуществления. Хранилища системы 132 управления могут также быть реализованы, используя любое сочетание баз данных или считываемых компьютером носителей. Например, хранилища могут присутствовать в присоединенном сетевом запоминающем устройстве, в сети области хранения, в некоторых их сочетаниях и т.д.
В некоторых вариантах осуществления система 132 управления может быть связана с центром 130 управления. Центр 130 управления может представлять собой любой объект, осуществляющий связь с устройством 112 адаптивного управления. В некоторых вариантах, например, центр 130 управления, может представлять бизнес, организацию, предприятие, образовательное учреждение, правительственный орган или агентство, человека или любой другой объект. Центр 130 управления может собирать, обрабатывать, хранить и предоставлять информацию устройству 112 адаптивного управления и другим системам (например, внешней системе 142) через систему 132 управления, совместимую с раскрытыми вариантами осуществления.
Среда 100 может содержать одну или более внешних систем (например, внешнюю систему 142) для приема, обработки, формирования, хранения и предоставления информации. Внешняя система 142 может содержать свои собственные компьютерные системы, серверы, репозитарии данных, процессоры и т.д., подобные имеющимся в системе 132 управления, устройстве 112 адаптивного управления или в любом другом компьютерном устройстве (например, как описано в связи с фиг. 2). Например, внешняя система 142 может содержать один или более серверов, персональный компьютер, ноутбук, планшетный компьютер, портативный компьютер, карманный компьютер, персонального цифрового секретаря, переносное навигационное устройство, мобильный телефон, носимое устройство, встроенное устройство, смартфон, и любое дополнительное или альтернативное компьютерное устройство. Компоненты среды 100 (например, система 132 управления, устройство 142 адаптивного управления и т.д.) могут быть выполнены с возможностью приема информации и предоставления информации внешней системе 142, чтобы проводить процессы, совместимые с раскрытыми вариантами осуществления.
В некоторых вариантах внешняя система 142 может быть связана с внешним объектом 140. Внешний объект 140 может представлять любой бизнес, объект, образовательное учреждение, правительственный орган или агентство, человека и т.д., используя внешнюю систему 142 для обработки информации. Например, в одном из вариантов осуществления внешний объект 140 может содержать водителя транспортного средства 110. В другом примере внешний объект 140 может представлять собой бизнес, такой как социальный сетевой сайт.
На фиг. 2 показана блок-схема примерной компьютерной системы 200 для реализации определенных вариантов раскрытых вариантов осуществления. Например, в некоторых вариантах компьютерная система 200 может представлять собой компьютерные системы, связанные с устройством (например, с устройством 112 адаптивного управления, системой 132 управления, внешней системой 142 и т.д.), выполняющим один или более раскрытых здесь процессов. В некоторых вариантах осуществления компьютерная система 200 может содержать один или более процессоров 202, соединенных с магистралью 206 связи, такой как шина или внешняя сеть связи (например, любая среда передачи цифровых данных, такая как LAN, MAN, WAN, сотовая сеть, сеть WiFi, канал NFC, Bluetooth, сеть GSM, сеть PCS, соединение ввода-вывода, любое проводное соединение, такое как USB или проводная аппаратная схема, и любые сопутствующие протоколы, такие как HTTP, TCP/IP, RFID и т.д.).
В некоторых вариантах компьютерная система 200 содержит основную память 208. Основная память 208 может содержать оперативную память (random access memory, RAM), представляющую собой физический и непереносной считываемый компьютером носитель, хранящий компьютерные программы, наборы команд, управляющую программу или данные, исполняемые процессором 202. При исполнении процессором 202 такие команды, компьютерные программы и т.д. позволяют процессору 202 выполнять один или более процессов или функций, совместимых с раскрытыми вариантами осуществления. В некоторых вариантах такие команды могут содержать машинный код (например, получаемый от компилятора) и/или файлы, содержащие управляющую программу, которую процессор 202 может исполнять с помощью интерпретатора.
В некоторых вариантах основная память 208 может также содержать или соединяться с вторичной памятью 210. Вторичная память 210 может содержать дисковод 212 (например, HDD, SSD), и/или съемный дисковод 214 для хранения данных, такой как дисковод с магнитной лентой, флэш-память, оптический дисковод, дисковод CD/DVD и т.п.Съемный дисковод 214 для хранения данных может осуществлять считывание и/или запись на съемный блок 218 хранения данных способом, известным специалистам в данной области техники. Съемный блок 218 хранения данных может являться магнитной лентой, оптическим диском или другим носителем, который считывается и записывается съемным дисководом 214 для хранения данных. Съемный блок 218 хранения данных может являться физическим и непереносным считываемым компьютером носителем, на котором хранятся компьютерные программы, наборы команд, управляющая программа или данные, которые должны исполняться процессором 202.
В других вариантах осуществления вторичная память 210 может содержать другие средства, позволяющие загружать компьютерные программы или другие команды в компьютерную систему 200. Такими средствами могут являться, например, другой съемный блок 218 хранения данных или интерфейс 220. Примером таких средств может являться съемная микросхема памяти (например, EPROM, RAM, ROM, DRAM, EEPROM, устройства флэш-памяти или другие устройства энергозависимой или энергонезависимой памяти) и сопутствующая панель или другие съемные блоки 218 хранения данных и интерфейсы 220, позволяющие передавать команды и данные из съемного блока 218 хранения данных в компьютерную систему 200.
Компьютерная система 200 также содержит один или более интерфейсов 224 связи. Интерфейс 224 связи может позволить передавать программное обеспечение и данные между компьютерной системой 200 и внешними системами (например, в дополнение к магистрали 206). Интерфейс 224 связи может содержать модем, сетевой интерфейс (например, карту Ethernet), порт связи, слот и карту PCMCIA и т.д. Интерфейс 224 связи может передавать программное обеспечение и данные в форме сигналов, которые могут быть электронными, электромагнитными, оптическими или другими сигналами, пригодными для приема интерфейсом 224 связи. Эти сигналы могут подаваться на интерфейс 224 связи по каналу прохождения связи (например, канал 228). Канал 228 может пропускать сигналы и может быть реализован, используя проводную, кабельную, оптоволоконную, радиочастотную линию и/или другие каналы связи. В одном из вариантов осуществления сигналы содержат пакеты данных, передаваемые процессору 202. Например, компьютерная система 200 может принимать сигналы от датчиков (например, от датчиков 114) через интерфейс 224 связи и/или магистраль 206 связи. Информация, представляющая обработанные пакеты, может также передаваться в форме сигналов от процессора 202 через канал 228 прохождения связи.
В некоторых вариантах реализуемые компьютером способы, описанные здесь, могут быть осуществлены на одном процессоре компьютерной системы, таком как процессор 202 компьютерной системы 200. В других вариантах осуществления эти реализуемые компьютером способы могут быть осуществлены, используя один или более процессоров внутри единой компьютерной системы и/или на одном или более процессорах в пределах отдельных компьютерных систем, связанных по сети.
В некоторых вариантах осуществления, связанных с фиг. 2, термины "запоминающее устройство" и "носитель" могут относиться к конкретным устройствам, содержащим, без ограничения, основную память 208, вторичную память 210, жесткий диск, установленный на дисководе 212 жесткого диска, и съемный блок 218 хранения данных. Дополнительно, термин "считываемый компьютером носитель" без ограничения может относиться к таким устройствам, как жесткий диск, установленный в дисководе 212 жесткого диска, любое сочетание основной памяти 208 и вторичной памяти 210 и съемный блок 218 хранения данных, которые могут, соответственно, обеспечивать компьютерные программы и/или наборы команд для процессора 202 компьютерной системы 200. Такие компьютерные программы и наборы команд могут храниться на одном или более считываемых компьютером носителях. В некоторых вариантах компьютерные программы и наборы команд могут также приниматься через интерфейс 224 связи и храниться на одном или более считываемых компьютером носителях.
Раскрытые варианты осуществления содержат системы и способы для динамичного управления процессами сбора данных на основе датчиков транспортных средств. Эти варианты осуществления могут динамично управлять сигналами, принимаемыми устройством 112 адаптивного управления от датчиков 114 транспортного средства, и их соответствующими частотами выборки, основываясь на изменениях переменных управления. Эти изменения переменных управления могут осуществляться сигналами и информацией, принимаемыми от внешних систем (например, системы 132 управления, внешней системы 142 и т.д.). Раскрытые варианты осуществления могут также фильтровать принятые сигналы с помощью полосовых фильтров, которые динамично регулируются на основе переменных управления. Кроме того, раскрытые варианты осуществления могут использовать обнаружение событий, чтобы обнаруживать возникновение или отсутствие возникновения определенных событий. Эти процессы обнаружения событий могут динамично регулироваться, чтобы учитывать изменения переменных управления. Раскрытые варианты осуществления могут дополнительно содержать использование переменных управления для подтверждения обнаруженных событий. Раскрытые варианты осуществления могут содержать различные дистанционные компьютерные устройства, осуществляющие связь, передачу и прием информации, сформированной в рамках каждого процесса, чтобы непрерывно обновлять переменные управления, позволяя, таким образом, динамично регулировать каждую подпрограмму на основе текущих данных. Таким образом, раскрытые варианты осуществления могут повышать эффективность и точность вычислений в каждой из раскрытых систем, благодаря постоянно меняющимся наборам рабочих переменных управления. Эти динамичные регулировки позволяют раскрытым вариантам осуществления быстро и непрерывно реагировать на изменения информации, факторы окружающей среды и на информацию из других источников.
На фиг. 3 показана блок-схема последовательности выполнения операций совместимого с раскрытыми вариантами осуществления примерного процесса 300 сбора и обработки данных транспортного средства, которые динамично регулируются. Варианты осуществления, описанные в связи с процессом 300, могут быть реализованы посредством аппаратных средств и/или программного обеспечения на одном или более компонентах среды 100, таких как устройство 112 адаптивного управления, система 132 управления, некоторые их сочетания и т.д. В одном из вариантов, например, этапы процесса 300 могут происходить на устройстве 112 адаптивного управления, как описано ниже. В других вариантах процесс 300 вариантов осуществления может быть разделен между любым количеством компьютерных систем. Кроме того, некоторые варианты процесса 300 могут быть перестроены, реорганизованы, повторяться, пропускаться, дополняться, модифицироваться, или интегрироваться в дополнительные процессы способами, совместимыми с раскрытыми вариантами осуществления.
В некоторых вариантах осуществления процесс 300 содержит получение набора граничных условий для устройства 112 адаптивного управления, принимаемого от внешней компьютерной системы, такой как система 132 управления (этап 302). В некоторых вариантах граничное условие может представлять собой информацию, связанную с условием, статусом, состоянием, переменной или обстоятельством, внешним по отношению к транспортному средству 110. Эта информация может храниться или формироваться на месте (например, на устройстве 112 адаптивного управления) и/или на удаленном устройстве (например, в системе 132 управления). Кроме того, эти данные могут быть основаны на информации, получаемой от других внешних систем, таких как внешняя система 142, а также на информации, принятой или обработанной устройством 112 адаптивного управления (например, на принятых сигналах, обнаруженных событиях и т.д.). Граничное условие может основываться на текущей, ожидаемой (например, прогнозируемой) и/или архивной информации.
В одном из примеров, например, набор граничных условий может содержать тип дороги, маршрут и/или состояние дорожного полотна, отражающие характеристики дороги, по которой в настоящий момент движется транспортное средство, будет двигаться (например, основываясь на ожидаемом маршруте, полученном от навигационной системы, или на архивных данных), или двигалось в прошлом. Такие дорожные характеристики могут содержать любое свойство дороги, такое как ее длина, ширина, кривизна (например, в различных точках вдоль дороги), количество полос движения, тип или классификация (например, высокоскоростное шоссе, платная дорога, автомагистраль, местная дорога), список содержащихся участков дороги или перекрестков и т.п.
Набор граничных условий может также содержать состояние погоды, отражающее текущие, ожидаемые или сложившиеся в прошлом условия состояния окружающей среды. Эта информация об окружающей среде может содержать любые данные, связанные с погодой, такие как температура, влажность, уровень или скорость выпадения осадков, атмосферное давление, скорость или направление ветра, точка росы, видимость, индекс тепла, степень облачного покрытия (например, солнечный, в основном, облачный, и т.д.), и так далее. В некоторых вариантах осуществления погодные условия могут основываться на информации, принятой от устройства 112 адаптивного управления (например, через текущие или прошлые сигналы температуры, давления и влажности). Дополнительно или альтернативно, погодные условия могут быть основаны на информации, доступной на внешней системе 142.
Набор граничных условий может содержать условия трафика, отражающие текущие, сложившиеся ранее и/или прогнозируемые уровни загруженности, связанные с текущим или ожидаемым местоположением транспортного средства 110. Эта информация может быть основана на текущем или предсказанном маршруте транспортного средства 110, являющемся результатом, например, информации, хранящейся в навигационной системе (например, при связи с устройством 112 адаптивного управления, как частью самого устройства, или как с отдельной внешней системой 142, и т.д.) и/или на предпочитаемых водителем в прошлом маршрутах или дорогах (дополнительно обсуждается позже). Например, состояние трафика может представлять собой уровни загруженности, связанные с текущим активным маршрутом транспортного средства 110 (например, основанным на встроенной навигационной системе, применении маршрутизации на мобильном устройстве 142 водителя, данных, хранящихся в устройстве 112 адаптивного управления, и т.д.) с ожидаемыми объездами, чтобы учесть сложившееся ранее предпочтение водителем определенных дорог или типов дорог.
В некоторых вариантах осуществления набор граничных условий может также содержать условие карты средней скорости, отражающее среднюю скорость транспортных средств в пределах некоторого расстояния или диапазона близости транспортного средства 110 (например, 50 футов, 100 футов, 500 футов и т.д.). В некоторых варианта условие карты средней скорости может также основываться на текущей, сложившейся ранее или предсказанной средней скорости транспортных средств, связанной с текущим расположением транспортного средства 110 (например, второй диапазон близости, дорога, участок дороги и т.д.).
Набор граничных условий может дополнительно содержать условие черной точки, отражающее путь, маршрут, участок дороги, пересечение, точку, расположение и т.д., где вероятность попадания в аварию высокая (например, вероятность аварии превышает порог). В некоторых вариантах условие черной точки может основываться на текущем, архивном или ожидаемом расположении или маршруте транспортного средства 110, так как здесь описано. Условие черной точки может также представлять собой информацию об авариях, хранящуюся в системе в среде 100 (например, в устройстве 112 адаптивного управления, во внешней системе 142, такой как магистральная патрульная система, и т.д.). Информация об авариях может содержать данные, такие как количество произошедших ранее аварий, связанных с местоположением, уровнями загруженности (ранее сложившимися, текущими, ожидаемыми и т.д.), связанными с данным местоположением расположением и/или с местами поблизости, и другую информацию, совместимую с раскрытыми вариантами осуществления. В некоторых вариантах осуществления условие черной точки может также содержать информацию об авариях, связанную с другими местами и дорогами. Например, условие черной точки может возникать как функция количества аварий в данном месте, уровня загруженности и т.д., по сравнению с такими же количествами для подобных местоположений (например, по типам дорог и т.д.), соседних местоположений, местоположений вдоль определенного маршрута и других таких параметров. В одном иллюстративном примере, например, условие черной точки может представлять собой участки дорог или другие местоположения, имеющие частоту аварий выше местного или среднего национального показателя для подобных мест.
Набор граничных условий может содержать стандартное состояние водителя, отражающее среднее или совокупное поведение водителя (например, профили ускорения, положения, торможения, движения на повороте и/или скорости) для нескольких или всех водителей. В некоторых вариантах осуществления стандартное состояние водителя может содержать информацию о поведении, связанную с водителями вообще (например, в любых погодных условиях, для любых типов дорог и т.д.). В других вариантах осуществления стандартное состояние водителя может ограничиваться определенными размерностями, такими как конкретные дороги, типы дорог, участки дорог, повороты или перекрестки, время суток, погодные условия, марка/модель/тип транспортного средства, возрастная группа водителя и т.д. В некоторых вариантах набор водителей может ограничиваться теми, которые связаны с устройством 112 адаптивного управления.
Аналогично, набор граничных условий может содержать текущее состояние водителя, отражающее среднее или совокупное поведение водителя (например, ускорение, положение, торможение, движение на повороте и/или информация о скорости) для водителя, в настоящий момент использующего транспортное средство 110. Эта информация может описывать поведение водителя в целом (например, по всем размерностям) или в пределах определенных размерностей (например, при движении вдоль конкретной дороги, дорожного участка, на повороте, времени суток, погодных условии и т.д., как описано выше). Состояние водителя может быть основано, например, на информации, полученной от устройства 112 адаптивного управления, и/или на информации об учетных данных водителя (например, предоставляемой устройству адаптивного управления), идентифицирующей конкретного водителя транспортного средства 110.
В некоторых вариантах набор граничных условий может также содержать информацию о состоянии устройств водителя, связанную или получаемую от электронного устройства (например, от внешней системы 142), связанного с водителем. Эта информация может содержать текущие, ожидаемые или полученные ранее данные биоритма (например, информацию о сне, сердечном ритме, кровяном давлении, предпринятых шагах) и/или данные об использования устройства (например, информацию, связанную с регистрацией вызовов, обменом сообщениями или электронной почтой, календарями, запланированными навигационными маршрутами, прослушиваемой музыкой, посещенными веб-сайтами, данными приложений и т.д.).
Набор граничных условий может также содержать условие обычного маршрута дороги, отражающее информацию, связанную с маршрутами, типами дорог, дорогами и/или участками дороги, обычно предпочитаемыми водителем транспортного средства 110. Такая информация может основываться, например, на информации об использовавшейся ранее маршрутизации и вождении, отслеживаемой устройством 112 адаптивного управления, подобной информации, хранящейся в навигационных системах, связанных с транспортным средством 110 или с водителем (например, на внешней системе 142, такой как мобильный телефон), и т.п.В одном примере, например, условие обычного маршрута может представлять собой то, что водитель обычно избегает высокоскоростных магистралей, поступает так для определенных участков конкретных высокоскоростных магистралей, предпочитает одну дорогу или сравнение маршрута с другими, и т.д.
Набор граничных условий может также содержать условие социальной сети, отражающее информацию, полученную из одной или более социальных сетей, связанных с водителем транспортного средства 110. Эта информация о социальной сети может содержать данные, такие как время и место сообщений; контент таких сообщений (например, анализированных лексическим или семантическим процессом, чтобы извлечь необходимую информацию, такую как интересы, эмоции, будущие или прошлые события, и т.д.); указанные интересы, "лайки" или предпочтения (например, музыка, фильмы, хобби, спорт, люди, политика и т.д.); любую вышеупомянутую информацию для друзей, спутников и т.д.; биографическую или демографическую информацию (например, день рождения, степень(-и) образования, институт(-ы), присудивший степень, адрес проживания, работодатель или тип занятости, вероисповедание, семейное положение и т.д.); совместно используемую информацию (например, совместно используемые новые изделия); и/или любую другую информацию, извлекаемая из любой социальной сети, известной специалистам в данной области техники. Компьютерные системы, получающие такую информацию (например, система 132 управления) могут это делать через сеть (например, сеть 120 связи), основываясь на информации, хранящейся, размещенной и управляемой социальной сетью (например, такой как внешняя система 142).
В некоторых вариантах набор граничных условий может также содержать условие прежних исков, отражающее информацию, связанную с одним или более страховыми исками, связанными с транспортным средством 110. Эта информация об исках может содержать данные, такие как количество исков, частота исков, суммы, связанные с исками (например, сумма каждого индивидуального иска, среднее значение, сумма, медианное значение и т.д.), характер исков и другую такую информацию.
В некоторых вариантах осуществления процесс 300 может содержать прием набора индексов опасности, связанных с транспортным средством 110 или с его водителем (этап 302). В некоторых вариантах индекс опасности может представлять собой меру или степень воздействия опасности, связанной с водителем или транспортным средством 110 в отдельный момент времени. Индекс опасности может содержать архивную, текущую и/или прогнозируемую информацию и может быть связан с прошлым, текущим или будущим периодом времени (например, прогнозируемое воздействие на водителя опасности в будущем). Индекс опасности может быть основан, например, на одном или более граничных условиях, принятых или сформированных системой 132 управления, и/или на информации, принятой от устройства 112 адаптивного управления (например, любой сигнал или другая информация, описанные со ссылкой на фиг. 3-8). В некоторых вариантах индекс опасности может представлять собой воздействие на водителя опасности, основанной на поведении при вождении этим водителем (например, основанной на сигналах скорости, ускорении, поворотов, торможения и/или положения, принятых устройством 112 адаптивного управления), внимании (например, основываясь на информации, связанной с условием устройства водителя, условием социальной сети, условием карты средней скорости, такой как, посылает ли водитель текстовые сообщения, и т.д.), и/или среде (например, основываясь на погодных условиях или на соответствующих сигналах, принимаемых через устройство 112 адаптивного управления, таких как температура, видимость, осадки, уровни влажности и т.д.). Индекс опасности может формироваться и обновляться, используя любой процесс, совместимый с раскрытыми вариантами осуществления, такими, как описано со ссылкой на фиг. 8.
В некоторых вариантах процесс 300, может содержать формирование, обновление, модификацию, добавление, изменение и/или удаление одной или более переменных управления из набора переменных управления, управляющих различными вариантами раскрытых вариантов осуществления (этап 304). В некоторых вариантах набор переменных управления может управлять тем, как устройство 112 адаптивного управления и/или система 132 управления собирают, управляют и обрабатывают данные. Например, набор переменных управления может определять некоторые параметры, вводы и пороги подпрограмм, описанные в связи с фиг. 3-8, такие как конкретные сигналы, полученные от датчиков 114 транспортного средства, частоты, с которой устройство 112 адаптивного управления делает выборки, и/или различные параметры, вводы и пороги в процессах, связанных с полосовой фильтрацией, обнаружением событий и, помимо прочего, с последующей обработкой. Таким образом, в некоторых вариантах переменные управления определяют входные сигналы и другую собранную информацию (например, выборки сигналов, полученная внешняя информация и т.д.), а также процессы, использующие эту информацию (например, изменяя фильтры, веса и пороги), чтобы определить, произошло ли событие. Эти процессы ниже описываются более подробно. Набор оперативных переменных управления (например, переменная(-ые) управления, действующая в любой момент времени), может быть основан на наборе граничных условий, наборе индексов опасности и/или на любой описанной здесь информации. Для примера, набор переменных управления может основываться частично на сигналах, принятых устройством 112 адаптивного управления от датчиков 114 транспортного средства, обнаружении конкретного события, применении конкретного фильтра, текущих погодных условиях, на информации о социальной среде, ожидаемых маршрутах, по которым, как предполагается, будет следовать водитель, кривизне дорожных участков и так далее. Набор переменных управления может быть запомнен в памяти в любом соответствующем компьютерном устройстве, таком как память устройства 112 адаптивного управления и/или система 132 управления.
Поскольку переменные управления в некоторых вариантах могут управлять тем, как устройство 112 адаптивного управления собирает и обрабатывает данные, изменения в рабочем наборе переменных управления (например, создание новой переменной, удаление или изменение существующей переменной и т.д.) могут в результате вызывать изменение способа, которым устройство 112 адаптивного управления обрабатывает информацию. Например, изменение в наборе рабочих переменных управления может вызывать изменение сигналов выборки с помощью устройства 112 адаптивного управления, их соответствующих частот выборки, применяемых полосовых фильтров, обнаружения событий или порогов подтверждения и/или любого другого параметра переменной, совместимого с раскрытыми вариантами осуществления. Устройство 112 адаптивного управления может автоматически и непрерывно обнаруживать изменения в наборе переменных управления, чтобы динамично регулировать раскрытые здесь процессы.
Набор переменных управления может содержать набор переменных локального управления и/или набор переменных внешнего управления. Переменные внешнего управления могут представлять собой переменные управления, сформированные, обновленные и/или подвергаемые влиянию информации, внешней по отношению к устройству 112 адаптивного управления. Например, в некоторых вариантах переменные внешнего управления могут быть основаны на наборе граничных условий и/или на наборе индексов опасности, принимаемых от системы 132 управления. В одном из вариантов осуществления, например, набор переменных внешнего управления может быть основан на полученных ранее, текущих или ожидаемых погодных условиях, моделях трафика и информации о дороге и маршруте, усредненном поведении водителя или на любой другой информации, связанной с граничным условием или индексом опасности. Дополнительно или альтернативно, набор переменных внешнего управления может быть основан на других типах информации, полученной или принятой от внешней системы 142 или системы 132 управления. В одном из вариантов, например, устройство 112 адаптивного управления может принимать команду от системы 132 управления, чтобы добавлять, модифицировать, удалять и т.д. переменную внешнего управления с помощью или без помощи любого соответствующего изменения граничного условия или индекса опасности. Переменные внешнего управления могут быть сформированы локально на устройстве 112 адаптивного управления (например, в ответ на информацию, принятую от системы 132 управления), или на внешней системе (например, системе 132 управления) и переданы устройству адаптивного управления.
Переменные локального управления могут представлять собой переменные управления, сформированные, обновленные и/или подвергнутые влиянию информации, локальной по отношению к устройству 112 адаптивного управления. В некоторых вариантах переменные локального управления могут формироваться и обновляться на устройстве 112 адаптивного управления и могут быть основаны на любой информации, совместимой с вариантами осуществления, описанными в связи с фиг. 3-7. Например, устройство 112 адаптивного управления может формировать или обновлять набор переменных локального управления, основываясь на наборе сигналов, принимаемых от датчиков транспортного средства 114 (например, информации, кодированной в наборе сигналов, наборе сигналов выборки и т.д.). В одном из примеров устройство 112 адаптивного управления может формировать или обновлять переменные локального управления, основываясь на текущем температурном сигнале от температурного датчика. В другом примере устройство 112 адаптивного управления может обновлять набор переменных локального управления, основываясь на сложившемся в прошлом поведении водителя при вождении, как оно контролируется устройством адаптивного управления (например, основываясь на прежних сигналах ускорения, положения, торможения, движения на повороте и/или скорости). Набор переменных локального управления может также содержать переменные управления, создаваемые из процессов, проводимых на устройстве 112 адаптивного управления. Например, набор переменных локального управления может содержать переменные управления, сформированные, исходя из применяемого полосового фильтра, анализа обнаружения событий и/или последующей обработки, как описано со ссылкой на фиг. 5-7. В некоторых вариантах осуществления наборы переменных локального и внешнего управления не являются взаимно исключающими. Например, набор переменных управления может быть обновлен, основываясь на сложившемся ранее поведении водителя при вождении, как оно измеряется сигналами, принятыми устройством 112 адаптивного управления, а также на граничном условии, принятом от системы 132 управления.
В некоторых вариантах осуществления процесс 300 может содержать прием устройством 112 адаптивного управления набора сигналов, связанных с набором датчиков 114 транспортного средства (этап 306). Эти сигналы могут основываться на информации, связанной с характеристиками, измеренными (или полученными от) датчиков 114, такими как скорость, ускорение, торможение, движение на повороте, температура, давление воздуха, положение, рыскание, тангаж, крен, и/или на любой другой информации, связанной с датчиками, совместимыми с раскрытыми вариантами осуществления (например, любым компонентом транспортного средства, соединенным с шиной CAN, таким как датчики двигателя и давления воздуха в шинах). В некоторых вариантах осуществления набор сигналов, принимаемых или обрабатываемых посредством выборки, может быть основан на наборе переменных управления, хранящихся на устройстве 112 адаптивного управления. Например, набор переменных управления может определять набор сигналов выборки, основываясь на сигналах, требующихся для анализа с помощью полосового фильтра, анализа обнаружения событий и/или анализа подтверждения события, как дополнительно описано со ссылкой на фиг. 5-7. Для примера, переменные управления могут дать устройству 112 адаптивного управления команду производить выборку сигналов, связанную с движением на повороте, тангажом, рысканием и/или креном, чтобы определить или подтвердить возникновение события движения на повороте. Устройство 112 адаптивного управления может определить набор сигналов для выборки, основываясь на наборе хранящихся или принятых переменных управления, и может делать выборку идентифицированных сигналов в наборе сигналов, совместимых с этим определением.
В некоторых вариантах устройство 112 адаптивного управления может модифицировать или регулировать набор сигналов выборки после обнаружения изменения в наборе рабочих переменных управления (этап 304). Изменения в наборе рабочих переменных управления могут регулировать типы, количество и/или идентификационные данные сигналов выборки устройства 112 адаптивного управления. Поскольку набор переменных управления может непрерывно или периодически изменяться со временем, такая структура позволяет устройству 112 адаптивного управления динамично регулировать набор сигналов выборки от датчиков 114. Устройство 112 адаптивного управления может регулировать набор сигналов выборки, выполняемой аппаратными средствами и/или программным обеспечением, исполняемым одним или более процессорами. Например, устройство 112 адаптивного управления может регулировать первый набор сигналов выборки, выключая ранее выбранный сигнал (например, сигнал в первом наборе сигналов) и/или включая сигнал, не входивший ранее в выборку (например, сигнал не из первого набора сигналов) через аппаратные средства, выбирая, таким образом, второй, другой набор сигналов. Такие аппаратные средства могут принимать форму, например, переключателей во встроенной схеме устройства 112 адаптивного управления. В другом примере устройство 112 адаптивного управления может запрещать или разрешать эти сигналы через программное обеспечение, например, снижая значение выбранного сигнала до нуля или удаляя такое нулевое условие из другого сигнала.
Устройство 112 адаптивного управления может делать выборку каждого сигнала в наборе сигналов с соответствующей частотой выборки (этап 306). Эти частоты выборки могут меняться в зависимости от принятых сигналов и могут определяться в наборе переменных управления. Например, устройство 112 адаптивного управления может сделать выборку первого сигнала (например, ускорения, угловой скорости) с первой частотой (например, 6 кГц) и может сделать выборку второго сигнала (например, внешней температуры) со второй частотой (например, 1 Гц). Частота выборки частично может основываться на типе принятого сигнала. В приведенном выше примере, например, устройство 112 адаптивного управления может делать выборку сигнала ускорения чаще, чем сигнала температуры. Устройство 112 адаптивного управления может определить соответствующую частоту выборки для каждого сигнала в наборе сигналов, основываясь на наборе переменных управления.
В некоторых вариантах осуществления обнаруженное изменение в наборе одной или более рабочих переменных управления может регулировать одну или более частот выборки в наборе частот выборки (этап 304). Устройство 112 адаптивного управления может определить, как регулировать частоту выборки для конкретного сигнала, основываясь на обнаружении изменения(-ий) в наборе переменных управления. В некоторых вариантах осуществления изменения в наборе переменных управления могут показывать, что конкретный сигнал или условие стали более или менее важными для процесса, совместимого с раскрытыми вариантами осуществления (например, маршрутом, описанным в связи с фиг. 5-8). Например, набор переменных управления может изменяться при обнаружении более тяжелых погодных условий, чтобы заставить устройство 112 адаптивного управления делать выборку сигналов, связанных с погодной информацией (например, температура, уровни влажности, видимость, уровень осадков и т.д.), информацией о скорости и т.д., более часто, чем при более спокойных, сухих условиях.
В некоторых вариантах осуществления, устройство 112 адаптивного управления передает набор сигналов (например, сами значения сигналов и/или тип сигналов выборки), набор частот выборки и/или другую информацию, связанную с набором датчиков выборки (например, датчиков, связанных с принятыми сигналами), другой компьютерной системе для дополнительной обработки. Эта обработка может содержать процессы, такие как описано в связи с фиг. 8 в системе 132 управления. Например, система 132 управления может принимать набор сигналов и их частоты выборки с выхода устройства 112 адаптивного управления, регулировать одно или более граничных условий и/или индексов опасности в ответ на принятую информацию, предоставлять обновленный набор граничных условий устройству адаптивного управления (этап 302), который может заставить устройство адаптивного управления регулировать рабочий набор переменных управления (этап 304), который, в свою очередь, помимо прочего, может заставить устройство адаптивного управления изменить набор выбранных сигналов и/или их частот выборки (этап 306). Дополнительно или альтернативно, устройство 112 адаптивного управления может формировать или обновлять набор рабочих переменных управления, основываясь на информации, кодированной в наборе сигналов выборки, и на другой информации, совместимой с раскрытыми вариантами осуществления.
В некоторых вариантах осуществления устройство 112 адаптивного управления применяет набор полосовых фильтров к принятым сигналам, чтобы уменьшить шум или другие артефакты (этап 308). Прохождение сигналов через полосовой фильтр(-ы) может создать набор отфильтрованных сигналов с более высоким отношением сигнал-шум (signal-to-noise ratio, SNR), чем у нефильтрованных сигналов. Применение полосовых фильтров может с помощью аппаратных средств (например, переключателей, конденсаторов, резисторов и других схем) и/или программного обеспечения (например, исполняя команды с помощью процессора) вызывать создание требуемого эффекта. Устройство 112 адаптивного управления может применять набор полосовых фильтров способами, совместимыми с раскрытыми вариантами осуществления, такими как процесс полосовой фильтрации, описанный в связи с фиг. 5. Например, устройство 112 адаптивного управления может определить, как применять набор полосовых фильтров, основываясь на наборе переменных управления, хранящихся в памяти. Устройство 112 адаптивного управления может обнаружить изменения в наборе переменных управления и динамично регулировать, как применять набор полосовых фильтров (этапы 304 и 308). В некоторых вариантах осуществления устройство 112 адаптивного управления может выводить или передавать информацию, связанную с процессом полосовой фильтрации, (например, данные, совместимые с вариантами осуществления, описанными в связи с фиг. 5) системе 132 управления для дополнительной обработки (например, такой, как описано со ссылкой на фиг. 8). В одном из примеров система 132 управления может принимать от устройства 112 адаптивного управления информацию, связанную с процессом полосовой фильтрации, обновлять граничное условие или индекс опасности, основываясь на принятой информации, и передавать обновленное граничное условие или индекс опасности устройству адаптивного управления (этап 302). Как раскрыто здесь, такое изменение в граничных условиях и/или индексах опасности может вызвать изменение в наборе рабочих переменных управления (этап 304), который, в свою очередь, может динамично регулировать то, как устройство 112 адаптивного управления применяет набор полосовых фильтров (этап 308). Дополнительно, устройство 112 адаптивного управления может самостоятельно обновлять набор переменных управления, основываясь на информации, созданной в процессе полосовой фильтрации.
Процесс 300 содержит выполнение анализа обнаружения событий для набора сигналов, таких как набор отфильтрованных сигналов, созданных на этапе 308, для набора нефильтрованных сигналов, полученных от датчиков 114, и т.д. (этап 310). Устройство 112 адаптивного управления может выполнять анализ обнаружения событий, чтобы определить возникновение или отсутствие возникновения события, как описано ниже с дополнительными подробностями. В некоторых вариантах это определение может содержать сравнение набора порогов события с набором сигналов и формирование реакции Булева типа, основанной на сравнении. Устройство 112 адаптивного управления может проводить обнаружение событий, используя любые процессы, совместимые с раскрытыми вариантами осуществления, такими как процессы обнаружения событий, описанные в связи с фиг. 6. Например, устройство 112 адаптивного управления может определять, как применять набор фильтров событий к набору сигналов, содержащих параметры, влияющие на пороги событий фильтров событий (например, на математические веса, сочетания сигналов и факторы событий и т.д.), основываясь на наборе переменных управления. Дополнительно, устройство 112 адаптивного управления может обнаружить изменение в наборе переменных управления и динамично соответственно регулировать подпрограммы обнаружения событий (этапы 304 и 310). Устройство 112 адаптивного управления может также выводить или передавать информацию, связанную с процессом обнаружения событий, чтобы управлять системой 132 для дополнительной обработки, такой как обработка, описанная в связи с фиг. 8 или выше. Устройство 112 адаптивного управления может также обрабатывать результаты обнаружения событий, чтобы обновлять набор рабочих переменных управления.
Процесс 300 содержит последующую обработку выполнения в ответ на обнаружение или отсутствие обнаружения события (этап 312). В некоторых вариантах эта последующая обработка может представлять собой процесс подтверждения, указывающий, что обнаруженное событие произошло или не произошло, такие как процесс подтверждения, описанный со ссылкой на фиг. 7. В некоторых вариантах осуществления этот процесс подтверждения может содержать контроль выбранных сигналов для периода времени, следующего за обнаруженным событием, и сравнение этих сигналов с набором порогов подтверждения. В некоторых вариантах устройство 112 адаптивного управления может определять входные сигналы и параметры (например, математические веса, сигналы выборки, пороги подтверждения и т.д.) таких подпрограмм последующей обработки, основываясь на наборе переменных управления. Кроме того, устройство 112 адаптивного управления может обнаруживать изменение в наборе переменных управления и, соответственно, динамично регулировать подпрограммы последующей обработки (этапы 304 и 312). В некоторых вариантах осуществления устройство 112 адаптивного управления может передавать информацию, связанную с последующей обработкой, другой компьютерной системе (например, системе 132 управления после подтверждения события), подтвержденной для проведения дополнительной обработки, совместимой с раскрытыми вариантами осуществления, такими, как описано на фиг. 8 или ранее.
В некоторых вариантах процесс 300 может содержать вывод данных события или их передачу системе 132 управления от устройства 112 адаптивного управления (этап 312). Данные события могут содержать информацию, связанную с приемом сигналов, полосовой фильтрацией, обнаружением событий и/или этапами последующей обработки. Например, данные события могут содержать индикацию, что устройство 112 адаптивного управления обнаружило событие, подтвердило событие, не обнаружило событие и т.д. Данные события могут также содержать информацию, связанную с такими этапами, как, например, набор сигналов выборки, набор частот выборки, события или пороги подтверждения, используемые на этапах обнаружении и подтверждения, что событие произошло или было подтверждено, или любую другую информацию, связанную с фиг. 3-8. Данные события могут принимать любую соответствующую форму для передачи информации, такую как сигнал, компьютерный файл, запись, электронный отчет, электронная почта, текстовое сообщение и т.д.
Устройство 112 адаптивного управления может передавать данные события системе 132 управления через сеть 120 связи. В некоторых вариантах система 132 управления может принимать данные события и проводить дополнительную обработку, совместимую с раскрытыми вариантами осуществления, такую как процессы, описанные выше или в связи с фиг. 8. Например, система 132 управления может принимать данные события, определять или модифицировать набор граничных условий, собирать или формировать информацию, связанную с такими граничными условиями, и предоставлять граничные условия и соответствующую информацию устройству 112 адаптивного управления (этап 302). Эти обновленные граничные условия и информация могут регулировать одну или более переменных управления, управляющих устройством 112 адаптивного управления (этап 304), которые, в свою очередь, могут вызвать динамичную регулировку раскрытых вариантов осуществления, как здесь описано (например, любая подпрограмма в сочетании с этапами 306-314).
На фиг. 4 схематично показана блок-схема 400 примерного устройства 112 адаптивного управления, осуществляющего связь с другими компонентами, совместимая с раскрытыми вариантами осуществления. Фиг. 4 представляет общий обзор обработки сигналов и потока данных, совместимых с некоторыми вариантами раскрытых процессов. В некоторых случаях варианты осуществления, описанные в связи с фиг. 4, могут быть реализованы через аппаратные средства (например, содержащие схему передачи сигналов, фильтрации и т.д.) и/или программное обеспечение (например, исполняемое процессорами в составе устройства 112 адаптивного управления, системы 132 управления и т.д.).
Как показано на фиг. 4, устройство 112 адаптивного управления может принимать набор сигналов от набора датчиков транспортного средства 114 с помощью логики 420 управления. В некоторых вариантах логика 420 управления может представлять собой аппаратные средства и/или программное обеспечение для формирования, обновления, модификации и/или управления набором переменных 422 управления, управляющих процессами внутри устройства 112 адаптивного управления. Переменные 422 управления логики 420 управления могут содержать любой тип или случай переменной управления, совместимый с раскрытыми вариантами осуществления. В некоторых вариантах, например, набор переменных 422 управления может содержать набор переменных 424 локального управления и набор переменных 426 внешнего управления. Как объяснено выше и как показано на фиг. 4, набор переменных 424 локального управления может частично основываться на сигналах, принятых от датчиков 114. В некоторых вариантах осуществления логика 420 управления может формировать набор переменных 424 локального управления и/или переменных 426 внешнего управления, используя любой соответствующий процесс, совместимый с раскрытыми вариантами осуществления, такими, которые раскрыты в связи с фиг. 3-8. Устройство 112 адаптивного управления может хранить набор переменных 422 управления в памяти.
В некоторых вариантах логика 420 управления может формировать и передавать сигнал 442 управления на динамическую логику 140 сбора данных, основываясь на наборе переменных 422 управления или его поднаборе. Динамическая логика 410 сбора данных может представлять собой аппаратные средства и/или программное обеспечение для динамичного сбора, выборки и фильтрации набора сигналов от датчиков 114, основываясь на сигнале 442 управления, принимаемом от логики 420 управления. В некоторых вариантах сигнал 442 управления может представлять собой команду для выборки конкретного набора сигналов, каждого с соответствующей частотой выборки. Динамическая логика 410 сбора данных может делать выборку в выбранном наборе сигналов от датчиков 114 в соответствии с сигналом 442 управления (например, делая выборку указанных командой сигналов с соответствующей частотой). Например, динамическая логика 410 сбора данных может выключать любой сигнал, не содержащийся в команде сигнала 442 управления, через переключатели 412. Точно также, динамическая логика 410 сбора данных может включать сигнал(-ы), назначенный в сигнале 442 управления, с помощью переключателей 412, так чтобы этот сигнал(-ы) был введен в набор сигналов выборки. Динамическая логика 410 сбора данных может также выключать и включать соответствующие сигналы через процессы программного обеспечения, исполняемые внутренними процессорами на устройстве 112 адаптивного управления, как объяснено выше. В некоторых вариантах осуществления динамическая логика 410 сбора данных может также подобным способом включать и выключать сигналы, проходящие на логику 420 управления от датчиков 114, (например, основываясь на том же самом или другом наборе 422 переменных управления), хотя такая манипуляция не требуется. Дополнительно или альтернативно, динамическая логика 410 сбора данных может выполнять варианты процессов приема сигналов и выборки, как здесь описано, таких как те, которые описаны со ссылкой на фиг. 3.
В некоторых вариантах осуществления динамическая логика 410 сбора данных может пропускать один или более сигналов выборки через набор полосовых фильтров 414. Как объясняется выше и ниже со ссылкой на фиг. 5, набор полосовых фильтров 414 может уменьшать шум и другие артефакты в сигналах выборки. В некоторых вариантах осуществления динамическая логика 410 сбора данных может пропускать все сигналы выборки через набор 414 полосовых фильтров. В других вариантах осуществления динамическая логика 410 сбора данных может подвергать воздействию набора полосовых фильтров 414 лишь подмножество сигналов выборки, основываясь на командах, содержащихся в сигнале 442 управления, поступающем от логики 420 управления (например, тот же самый или другой сигнал управления, как описано выше). Сигнал 442 управления может содержать другую информацию и команды, совместимые с раскрытыми вариантами осуществления.
В некоторых вариантах динамическая логика 410 сбора данных подает ответный сигнал 444 на логику 420 управления. Ответный сигнал 444 может содержать любую информацию, сформированную или обработанную логикой 410 сбора данных. Например, ответный сигнал 444 может содержать информацию, связанную с набором сигналов выборки (например, сами сигналы, датчики выборки, частоты выборки и т.д.), запрещенных или разрешенных сигналов, и/или любую информацию, связанную с полосовыми фильтрами (например, как раскрыто со ссылкой на фиг. 5). В некоторых вариантах логика 420 управления может принимать ответный сигнал 444 и, соответственно, обновлять набор переменных 422 управления. Например, логика 420 управления может принять решение модифицировать, добавить и/или удалить одну или более переменных 422 управления (например, изменяя набор переменных 424 локального управления), основываясь на информации, предоставленной в ответном сигнале 444. Это изменение в переменных 422 управления может вызвать дополнительные изменения и динамичное регулирование устройства 112 адаптивного управления и его процессов, совместимых с раскрытыми вариантами осуществления. Для примера, логика 420 управления может принять в ответном сигнале 444 от динамической логики 410 сбора данных прошедший полосовую фильтрацию сигнал поворота, указывающий, что водитель транспортного средства 110 поворачивает в пределах стандартных диапазонов (например, основываясь на информации граничного условия, отфильтрованных сигнальных данных и т.д.). Логика 420 управления может затем обновить переменные 422 управления, так чтобы когда это обновление обнаруживается в устройстве 112 адаптивного управления, динамическая логика 410 сбора данных делала выборку сигнала поворота при более низкой частоте выборки, но не до нуля (например, сигнал поворота выключен) и т.д.
Как показано на фиг. 4, устройство 112 адаптивного управления пропускает сигналы выборки от динамической логики 410 сбора данных, отфильтрованные или не отфильтрованные, через адаптивную логику 430 событий. В некоторых вариантах осуществления адаптивная логика 430 событий отражает процесс обнаружения событий для возникновения или не возникновения события, основываясь на наборе принятых сигналов. Адаптивная логика 430 событий может принимать форму аппаратных компонентов и/или компонентов программного обеспечения, совместимых с раскрытыми вариантами осуществления, такими как описано со ссылкой на фиг. 6.
В некоторых вариантах адаптивная логика 430 событий может пропускать набор сигналов через набор фильтров 432 событий. В некоторых вариантах осуществления фильтр 432 события может представлять собой набор команд для формирования порога события для конкретного набора сигналов и сравнивать эти сигналы с порогом события, чтобы сформировать реакцию Булева типа. В этих вариантах осуществления порог события может представлять критическое значение или меру одного или более сигналов, определяющих, когда событие или субсобытие (например, некоторое вспомогательное определение, необходимое, но не достаточное, чтобы определить возникновение события) считается произошедшим. Фильтр 432 события может подать команду адаптивной логике 430 события, как сформировать порог события, задавая определенный набор входных сигналов (например, скорость, ускорение и/или угол поворота), и затем сравнить сигнал, установленный для сформированного порога события, с Булевой реакцией. Для примера, фильтр 432 события может вывести Булеву реакцию действительного типа, когда сигнал, такой как сигнал скорости, превышает порог события, установленный с помощью фильтра события. Фильтр 432 события может сравнивать единичный сигнал с порогом события или сочетание нескольких сигналов с порогом события. Эти варианты осуществления описываются с дополнительными подробностями со ссылкой на фиг. 6. В некоторых вариантах фильтр 432 события, его определенные пороги события, его набор обработанных сигналов и т.д., могут управляться набором переменных управления, хранящихся внутри устройства 112 адаптивного управления.
Адаптивная 430 логика события может объединять набор сигналов и/или результаты для каждого фильтра 432 события с комбинационной логикой 434. Комбинационная логика 434 может представлять собой представление события (например, представление события) с точки зрения логической или математической комбинации одного или более сигналов и/или выходных сигналов фильтров 432 событий. То есть, представление события может идентифицировать то, как устройство 112 адаптивного управления (или система 132 управления) определяет, произошло ли событие, основываясь на математической или логической комбинации сигналов и/или выходных сигналов фильтров 432 событий. Комбинационная логика 434 может действовать на наборе сигналов или устанавливать результаты фильтра события способами, совместимыми с раскрытыми вариантами осуществления, такими как описано со ссылкой на фиг. 6.
Как показано на фиг. 4, например, комбинационная логика 434 может объединять результаты набора фильтров 432 событий в логическое выражение (например, основываясь на представлении события), чтобы сформировать индикацию Булева типа в отношении того, произошло ли событие. Логическое выражение может использовать любую перестановку операторов AND (И), NOT (НЕ), XOR (Исключающее ИЛИ) и/или OR (ИЛИ), отражающих представление события в логических терминах. Для примера, при условии, что приведенные три результата субсобытий SR1, SR2 и SR3 имеют место от трех фильтров 432 событий, комбинационная логика 434 может определить, что событие E произошло, когда (SR1 AND SR2) OR (NOT SR3) истинно, то есть, представление события может иметь вид:

В другом варианте осуществления, не показанном на фиг.4, комбинационная логика 434 может объединить набор фильтров в одно или более математических выражений, отражающих представление события для события (или субсобытия) E в математических терминах перед прохождением сигналов через фильтры 432 событий. Результаты комбинационной логики 434 могут затем проходить через фильтр 432 события, чтобы определить, произошло ли E. Например, для заданного набора сигналов x комбинационная логика 434 может сформировать или представлять собой представление события E как некую функцию x, которая затем сравнивается с порогом T события, определенным фильтром 432 события, так чтобы E считалось произошедшим, когда:
 .
.
В других вариантах осуществления адаптивная логика 430 события может использовать несколько таких комбинационных логик 434 и фильтров 432 событий в еще более сложных выражениях представления событий. Эти варианты осуществления дополнительно описываются ниже со ссылкой на фиг. 6.
Как показано на фиг. 4, параметры фильтра(-ов) 432 события и комбинационная логика 434 могут быть основаны на наборе переменных 422 управления в логике 420 управления. В некоторых вариантах, например, логика 420 управления может сообщить адаптивной логике 430 события параметры фильтров событий (например, как каждый фильтр события формирует порог события при условии заданного набора сигналов, набора выборок сигналов в фильтре событий и т.д.), комбинационную логику 434 (например, представление события в математических или логических терминах) и как они взаимодействуют (например, порядок и входные сигналы для фильтров событий и комбинационной логики) через сигнал 446 управления. В этих вариантах сигнал 446 управления может, таким образом, представлять собой команду адаптивной логике 430 события формировать Булеву реакцию на то, произошло ли событие при условии набора входных сигналов. В некоторых вариантах адаптивная логика 430 события может затем использовать набор фильтра(-ов) 432 события и/или комбинационной логики 434, совместимый с сигналом 446 управления.
В некоторых вариантах адаптивная логика 430 события может передать ответный сигнал 448 логике 420 управления. Ответный сигнал 448 может содержать любую информацию, сформированную или обработанную адаптивной логикой 430 события. Например, ответный сигнал 448 может содержать информацию, связанную с тем, произошло ли событие, произошло ли субсобытие, информацию, используемую для вычисления порога(-ов) события или любую другую информацию, совместимую с описанными здесь процессами обнаружения. В некоторых вариантах осуществления логика 420 управления может принимать ответный сигнал 448 и, соответственно, обновлять набор рабочих переменных 422 управления. Например, логика 420 управления может решить модифицировать, добавить, и/или удалить одну или более переменных 422 управления (например, изменяя набор переменных 424 локального управления), основываясь на информации, предоставленной в ответном сигнале 448 (например, произошло ли событие). Это изменение в переменных 422 управления может вызывать дополнительное динамичное регулирование устройства 112 адаптивного управления и его процессов, совместимое с раскрытыми вариантами осуществления. Для примера, логика 420 управления может принимать ответный сигнал 448 от адаптивной логики 430 события, указывающий, что произошло какое-то событие (например, событие ускорения или событие аварии). Логика управления может затем обновить переменные 422 управления, так чтобы когда это изменение обнаруживается устройством 112 адаптивного управления, динамическая логика 410 сбора данных произвела выборку конкретных сигналов (например, скорости) с конкретной частотой, пороги события в адаптивной логике 430 события снижаются (например, чтобы учесть повышенные уровни опасности) и т.п.
На любом этапе предшествующего процесса устройство 112 адаптивного управления может передавать сформированные данные или сопутствующую информацию системе 132 управления (или внешней системе 142) для дополнительной обработки, совместимой с раскрытыми вариантами осуществления. Например, как показано на фиг. 4, устройство 112 адаптивного управления может передавать результаты процесса обнаружения события адаптивной логикой 430 события системе 132 управления. В некоторых вариантах осуществления система 132 управления может принимать переданную информацию, чтобы проводить дополнительные процессы, раскрытые здесь (например, как описано со ссылкой на фиг. 8). Например, система 132 управления может модифицировать, добавлять и/или удалять одно или более граничных условий, обновлять один или более индексов опасности или получать дополнительную информацию от внешней системы 142, основываясь на информации, принятой от устройства 112 адаптивного управления. Система 132 управления может предоставлять эти обновленные граничные условия, индексы опасности и/или дополнительную информацию устройству 112 адаптивного управления, чтобы проводить на них дополнительную обработку. В одном из примеров устройство 112 адаптивного управления может использовать принятые данные, чтобы обновлять одну или более переменных 422 управления (например, обновляя набор переменных 426 внешнего управления, основываясь на новой информации о граничных условиях и/или индексах опасности). В другом примере устройство 112 адаптивного управления может использовать информацию, полученную от системы 132 управления, чтобы формировать один или более порогов событий.
На фиг. 5 показана блок-схема последовательности выполнения операций примерного процесса 500 полосовой фильтрации, совместимого с раскрытыми вариантами осуществления. Варианты, раскрытые со ссылкой на процесс 500, могут быть реализованы в среде 100 через аппаратные средства и/или программное обеспечение на одной или более компьютерных системах, таких как устройство 112 адаптивного управления и система 132 управления. Некоторые варианты процесса 500 могут быть реорганизованы, перестроены, повторены, пропущены, дополнены, модифицированы или интегрированы в дополнительные процессы способами, совместимыми с раскрытыми вариантами осуществления. Например, варианты осуществления, описанные со ссылкой на процесс 500, могут быть реализованы в устройстве 112 адаптивного управления. чтобы применить набор полосовых фильтров, таких как описано со ссылкой на этап 308 на фиг. 3 или внутри динамической логики 410 сбора данных, показанной на фиг. 4, и т.д.
В некоторых вариантах процесс 500 принимает набор сигналов, связанных с набором датчиков 114 транспортного средства (этап 502). Принятые сигналы могут иметь любую форму и могут представлять собой выходной сигнал любого датчика 114 или извлеченный сигнал, совместимый с раскрытыми вариантами осуществления. Для примера, процесс 500 может принимать набор из четырех сигналов, содержащих торможение, движение на повороте, положение и продольное ускорение. Таким способом может быть получено любое количество сигналов.
Процесс 500 может выполнить анализ шумов на одном или больше принятых (с шумами) сигналов (этап 504). В некоторых вариантах процесс 500 может выполнить анализ шумов на каждом принятом сигнале. В других вариантах процесс 500 может определить, выполнять ли анализ шумов на принятом сигнале (например, шумовом сигнале), основываясь на типе сигнала (например, параметр, мерой которого является сигнал), и/или определить набор переменных 422 управления, хранящийся на устройстве 112 адаптивного управления. В некоторых вариантах осуществления процесс 500 может выполнять анализ шумов на уровнях сигнала, усредненных в течение некоторого приращения времени, такого как одна или пять секунд.
В некоторых вариантах осуществления анализ шумов может содержать выполнение анализа Фурье на рассматриваемом шумовом сигнале(-ах). Такой анализ Фурье может содержать, например, формирование преобразования Фурье для принятого сигнала, чтобы представить сигнал в частотной области (например, чтобы сформировать спектральную плотность сигнала). Процесс 500 может затем содержать сравнение преобразованного сигнала в частотной области с пороговым уровнем мощности и определение одного или более диапазонов частот шумов, в которых спектральная мощность сигнала (например, его мощность в частотной области) превышают пороговый уровень мощности. В этих вариантах осуществления диапазоны частот шумов могут представлять собой полосы частот, в которых принятый сигнал демонстрирует существенные шумовые артефакты. Например, процесс 500 может усреднять сигнал ускорения за пять секунд и преобразовывать его в частотную область, чтобы определить, что его усредненная спектральная мощность превышает пороговый уровень мощности между частотами 500-1 000 Гц и 2 000-3 000 Гц. Эти два диапазона могут представлять собой диапазоны частот шумов сигнала (например, частоты, на которых сигнал содержит высокие уровни помех). Пороговый уровень мощности может быть определен заранее, зависеть от типа сигнала и/или основываться на наборе переменных управления, совместимых с раскрытыми вариантами осуществления. В одном из вариантов осуществления, например, устройство 112 адаптивного управления может определять пороговый уровень(-и) мощности для каждого сигнала, основываясь на наборе переменных 442 управления, управляемых логикой 420 управления.
В некоторых вариантах анализ шумов процесса 500 может дополнительно содержать определение минимальной частоты одного или более диапазонов частот шумов. В некоторых вариантах осуществления эта минимальная частота может представлять собой самое низкое значение частоты, для которого спектральная мощность превышает пороговый уровень мощности. В приведенном выше случае, например, устройство 112 адаптивного управления может определить минимальную частоту как равную 500 Гц. Дополнительно или альтернативно, процесс 500 может содержать вычисление минимальной частоты для каждого диапазона частот шумов в одном или более диапазонах частот шумов. Снова обращаясь к вышеупомянутому примеру, процесс 500 может определить диапазоны частот шумов, которые должны быть связаны с минимальными частотами 500 Гц и 2 ООО Гц, соответственно.
Процесс 500 может содержать определение того, превышают ли одна или более минимальных частот одного или более диапазонов частот пороговую частоту. В некоторых вариантах осуществления пороговая частота может представлять собой минимальную частоту среза, для реализации которой устройство 112 адаптивного управления может применять фильтр нижних частот. Например, устройство 112 адаптивного управления может содержать набор фильтров нижних частот, связанных с каждым набором сигналов с изменяющимися частотами среза. Для примера, устройство 112 адаптивного управления может содержать набор из четырех фильтров нижних частот, чтобы фильтровать сигналы выше 200 Гц, 400 Гц, 1 000 Гц и 3 000 Гц. В этом примере процесс 500 может определить пороговую частоту равной 200 Гц, поскольку это значение отражает минимальную частоту среза в доступных фильтрах нижних частот устройства 112 адаптивного управления. В некоторых вариантах фильтры нижних частот могут содержать любой соответствующий фильтр нижних частот для ведения процессов, совместимый с раскрытыми вариантами осуществления, такой как фильтр с конечной импульсной характеристикой (FIR) со 128 полюсами.
В некоторых вариантах процесс 500 содержит выбор и применение фильтра нижних частот при определенных условиях (этап 506). Например, процесс 500 может применять фильтр нижних частот, когда минимальная частота диапазона(-ов) частот шума превышает определенную пороговую частоту. Таким образом, процесс 500 может применять низкочастотную фильтрацию сигнала шума, когда устройство 112 адаптивного управления содержит фильтр нижних частот, способный к его фильтрации в его диапазонах частот шума. В некоторых вариантах осуществления выбор фильтра нижних частот может содержать идентификацию фильтра нижних частот в наборе фильтров нижних частот устройства 112 адаптивного управления с частотой среза, ближайшей, но не превышающей минимальную частоту диапазонов частот шума. Например, если диапазон частот шума составляет 500 Гц-1 ООО Гц, а устройство 112 адаптивного управления содержит фильтры нижних частот с частотами среза 200 Гц, 400 Гц, 1 ООО Гц, и 3 ООО Гц, процесс 500 может идентифицировать в качестве выбранного фильтра фильтр с частотой 400 Гц. В некоторых вариантах процесс 500 может затем применять выбранный фильтр (например, для пропускания шумового сигнала через выбранный фильтр нижних частот) для создания отфильтрованного сигнала. В некоторых вариантах осуществления процесс 500 может не применять ни один из фильтров нижних частот, когда минимальная частота диапазона частот шума падает ниже самой нижней частоты среза (например, пороговой частоты) в наборе фильтров нижних частот. Процесс 500 может повторять этот процесс для каждого диапазона частот шума для каждого выборки или шумового сигнала.
В дополнение или вместо процессов низкочастотной фильтрации, процесс 500 может содержать определение того, существуют ли артефакты остаточного шума в пределах набора сигналов выборки (этап 508). В некоторых вариантах осуществления процесс 500 может идентифицировать такие артефакты как диапазоны частот шума, имеющие ширину в частотной области меньшую, чем пороговая ширина шума. Для примера, сигнал из набора сигналов может быть диапазон частот шумов (например, диапазон частот, в котором существует шумовой артефакт) 600-640 Гц. В этом примере процесс 500 может определить пороговую ширину шума равной 50 Гц (например, основываясь на параметре, хранящемся в пределах системы среды 100). При этих условиях процесс 500 может идентифицировать этот сигнал как гарантирующий дополнительную фильтрацию, как описано ниже. Если процесс 500 определяет, что сигналы не удовлетворяют таким условиям, процесс 500 может завершиться (этап 510), чтобы продолжить другую обработку, совместимую с раскрытыми вариантами осуществления (например, процесс обнаружения события, показанный на фиг. 6). Эти определения могут повторяться для каждого диапазона частот шумов для каждого сигнала выборки. В некоторых вариантах осуществления пороговая ширина полосы частот шума может быть задана или сформирована, основываясь, например, на наборе переменных 422 управления, хранящихся на устройстве 112 адаптивного управления. Кроме того, диапазоны частот шумов в этом процессе могут основываться на одних и тех же или различных пороговых уровнях мощности как в описанных выше процессах низкочастотной фильтрации. Например, диапазон частот шумов, используемый на этапе 508, может применять более низкий пороговый уровень мощности, чем диапазон частот, используемый в процессах низкочастотной фильтрации, описанных выше.
Когда процесс 500 идентифицирует один или более сигналов, демонстрирующих артефакты остаточного шума, он может выбрать и применить полосовой заградительный фильтр для этих сигналов, чтобы подавить их на соответствующих частотах (этап 512). Например, устройство 112 адаптивного управления может содержать один или более полосовых заградительных фильтров, связанных с каждым из набора сигналов с переменными диапазонами частот и/или значениями затухания. Эти полосовые заградительные фильтры могут содержать любой пригодный полосовой заградительный фильтр для проведения процессов, совместимых с раскрытыми вариантами осуществления, такой как фильтр FIR с двумя полюсами. В некоторых вариантах процесс 500 может определить, когда полосовой заградительный фильтр, содержащийся или конфигурированный внутри устройства 112 адаптивного управления, находится, по существу, в пределах диапазона идентифицированных остаточных артефактов для конкретного сигнала (например, 25%, 50%, 75% и т.д. ширины полосы фильтрации полосового заградительного фильтра лежит в пределах диапазона частот шумов). Если это так, процесс 500 может выбрать и применить к сигналу полосовой заградительный фильтр (например, пропустить сигнал через полосовой заградительный фильтр), чтобы ослабить сигнал в пределах диапазона частоты среза. Процесс 500 может повторить этот процесс для каждого артефакта остаточного шума и каждого конфигурируемого полосового заградительного фильтра. Процесс 500 может затем быть закончен (этап 510), чтобы продолжить другую обработку, совместимую с раскрытыми вариантами осуществления.
Как здесь описано, любая информация, сформированная или как-либо иначе связанная с процессом 500, может быть передана удаленной компьютерной системе (например, системе 132 управления) и/или может использоваться устройством 112 адаптивного управления для обновления набора рабочих переменных 422 управления (например, через ответный сигнал 444, подаваемый на логику 420 управления). Например, процесс может использовать информацию, связанную с определенными диапазонами частот шумов, пороговыми уровнями мощности, минимальными частотами диапазонов частот шумов, выбранными фильтрами нижних частот, спектральной плотностью сигналов выборки, пороговой шириной полосы шумов и т.д., чтобы обновить набор переменных 422 управления и/или передать такую информацию системе 132 управления. Подразумевается, что любое количество переменных, представление, уравнение, соотношение и т.д. процесса 500 может управляться набором переменных управления и список определенных параметров или связанной с ними информации не подразумевает ограничений. Устройство 112 адаптивного управления может контролировать и обнаруживать такие изменения в переменных 422 управления и, соответственно, может динамично регулировать процессы раскрытых вариантов осуществления.
На фиг. 6 показана блок-схема последовательности осуществления операций примерного процесса 600 обнаружения событий, совместимого с раскрытыми вариантами осуществления. Варианты, раскрытые в связи с процессом 600, могут быть реализованы в среде 100 через аппаратные средства и/или программное обеспечение на одной или более компьютерных системах, таких как устройство 112 адаптивного управления и система 132 управления. Некоторые варианты процесса 600 могут быть перестроены, реорганизованы, повторены, исключены, дополнены, модифицированы или интегрированы в дополнительные процессы способами, совместимыми с раскрытыми вариантами осуществления. Например, варианты осуществления, описанные со ссылкой на процесс 600, могут быть реализованы в устройстве 112 адаптивного управления, чтобы обнаружить возникновение такого события, как описано со ссылкой на этап 310, показанном на фиг. 3, или в пределах адаптивной логики 430 события, показанной на фиг. 4, и т.д.
В некоторых вариантах процесс 600 содержит прием набора сигналов, связанных с набором датчиков 114 транспортного средства (этап 602). Принятые сигналы могут иметь любую форму и могут представлять собой выходной сигнал любого из датчиков 114 или извлеченный сигнал, совместимые с раскрытыми вариантами осуществления. Для примера, процесс 600 может принимать набор из четырех сигналов, содержащих сигналы торможения, движения на повороте, времени и ускорения. Таким способом может приниматься любое количество сигналов. Кроме того, эти сигналы могут быть отфильтрованы полосовым фильтром и совместимы с вариантами осуществления, описанными со ссылкой на фиг. 3-5, хотя такая фильтрация не обязательна.
В некоторых вариантах осуществления процесс 600 содержит выполнение классификации событий, чтобы определить, указывают ли принятые сигналы на присутствие конкретного класса потенциального события (этап 604). В некоторых вариантах идентификация класса события может содержать определение, соответствуют ли или коррелируются ли принятые сигналы с потенциальным событием вождения или потенциальным событием аварии. Потенциальное событие вождения может представлять собой конкретные поведения и/или условия, гарантирующие дополнительный анализ устройством 112 адаптивного управления за счет его связи или корреляции с опасным, аварийным или небезопасным вождением или условиями. Потенциальное событие вождения может содержать любое неаварийное событие и может соответствовать любому сигналу, совместимому с раскрытыми вариантами осуществления. Например, потенциальные события вождения могут содержать потенциальное событие ускорения, событие торможения, событие поворота, событие скорости и т.д. или любое другое событие, соответствующее принятому сигналу. Эти события могут представлять собой, например, присутствие события резкого торможения, событие внезапного поворота, события быстрого изменения маршрута и т.д. В некоторых вариантах потенциальное событие аварии может указывать вероятность, что транспортное средство 110 близко к аварии или недавно участвовало в аварии.
Процесс 600 может определить класс события для потенциального события, коррелируя принятые сигналы с одной или более моделями классификации событий, хранящихся в памяти. Эти модели классификации событий могут содержать, например, профили силы инерции, профили центробежной силы, скорость и профили переключения передач, профили тангажа, рыскания и крена, профили ускорения, матрицы ускорения и т.д., связанные с потенциальными событиями вождения и/или с потенциальными событиями аварии. Эти профили могут быть основаны на анализе архивных данных, лабораторных анализов, краш-тестов, переменных 422 управления и т.д. и могут быть предоставлены или сохранены локально на устройстве 112 адаптивного управления. В некоторых вариантах процесс 600 может идентифицировать класс события для потенциального события, определяя, превышает ли мера корреляции между одним или более принятыми сигналами и моделью классификации события порог классификации. Мера корреляции может представлять собой любую меру, указывающую степень соответствия между данными и моделью, такую как коэффициент корреляции, коэффициент определения, коэффициент множественной корреляции и т.д. Каждый тип события для потенциального события (например, события аварии, события поворота, события скорости и т.д.) может быть связан с одной или более моделями классификации событий с соответствующим порогом классификации.
В некоторых вариантах модели классификации событий и/или пороги классификации могут быть выбраны, основываясь на наборе параметров транспортного средства, связанных с транспортным средством 110. Эти параметры транспортного средства могут представлять собой любую физическую или техническую характеристику транспортного средства 110, такую как его вес, высота, длина, центр тяжести, собственные весы, радиус поворота, распределение веса, колесная база, показатели ускорения, предельные значения, мощность двигателя в лошадиных силах, вращающий момент, показатели торможения, коэффициент лобового сопротивления, тип транспортного средства, изготовитель, модель, год выпуска и т.д. Для примера, устройство 112 адаптивного управления может выбрать модели классификации события для транспортных средств одного и того же изготовителя, ту же самую модель, что и транспортное средство 110, схожие распределения веса, размеры и т.д., чтобы гарантировать, что при выполнении классификации события оно сравнивает транспортное средство 110 с подобным транспортным средством.
В некоторых вариантах осуществления различные параметры процесса классификации событий (или любая подпрограмма процесса 600) могут динамично регулироваться набором переменных 422 управления, хранящимся в устройстве 112 адаптивного управления. Например, набор переменных 422 управления может определить порог классификации каждого типа события для потенциального события управления (например, события движения на повороте, события скорости, события ускорения и т.д.), информацию, связанную с сигналом и профилями данных в моделях классификации событий, классы событий, типы доступных потенциальных событий вождения управления и т.д. Кроме того, информация, сформированная в предшествующих вариантах осуществления, может вызвать изменения в наборе переменных 422 управления. Например, в одном из вариантов, устройство 112 адаптивного управления может обновлять набор переменных 422 управления (например, через ответный сигнал 448, предоставляемый для логики 420 управления) после вычисления корреляции между одним или более сигналами и потенциальным событием, определяя, что корреляция превышает или падает ниже порога классификации, и так далее.
Процесс 600 может определять класс события для потенциального события, основываясь на наборе принятых сигналов, моделях классификации событий и порогах классификации, как описано выше (этапы 606 и 618). В некоторых вариантах, когда набор сигналов не указывает присутствие потенциального события вождения (этап 606) или потенциального события аварии (этап 618), процесс 600 может завершиться (этап 614), чтобы облегчить продолжающуюся обработку, совместимую с раскрытыми вариантами осуществления (например, контроль наборов сигналов, обновление переменных 422 управления, передача информации в центр 132 управления и т.д.).
Когда процесс 600 определяет, что набор сигналов представляет собой случай класса событий для потенциального события вождения (этап 606), процесс 600 может формировать или определять представление события как функцию набора фильтров 432 событий и/или набор сигналов (например, представление события). Это представление события может представлять собой конкретное сочетание фильтров 432 событий для набора сигналов, используемого для определения, имело ли событие место фактически. Как описано со ссылкой на фиг. 4, например, это представление события может представлять событие как логическое сочетание индивидуальных результатов набора фильтров 432 событий (например, через комбинационную логику 434) как математическую комбинацию индивидуальных сигналов, подвергнутых действию одного фильтра события или некоторому их сочетанию. Фильтр 432 события и их сочетание (например, через комбинационную логику 434) могут содержать любой фильтр события или сочетание, совместимые с раскрытыми вариантами осуществления, такими, как описано со ссылкой на фиг. 4 и ниже. В некоторых вариантах осуществления представление события может управляться набором переменных управления, хранящихся на устройстве 112 адаптивного управления.
В некоторых вариантах процесс 600 может содержать формирование одной или более оценок события для события вождения (этап 608). Оценка события может представлять собой вероятность, что событие или субсобытие произошло. Оценка события может быть основана на одном или более сигналах в принятом наборе сигналов. В некоторых вариантах оценка события может быть основана на представлении события или субсобытия. В одном из вариантов осуществления, например, оценка события S может представлять собой текущее или усредненное во времени значение (например, за некоторый период времени) сигнала x, взвешенного с помощью веса a сигнала:
S=αx.
В некоторых вариантах вес сигнала может представлять собой степень соотношения, воздействия, корреляции, ассоциации или значимости сигнала в событии или субсобытии. Низкий вес сигнала может отражать то, что соответствующий сигнал не коррелируется строго с возникновением события или субсобытия, в то время как высокий вес сигнала может представлять собой сильную корреляцию с (суб-) событием. Точно также, низкий или отрицательный вес сигнала может отражать, что сигнал коррелируется с отсутствием возникновения события (например, сигнал инверсно коррелируется с событием). Вес сигнала может принимать любое соответствующее значение, совместимое с раскрытыми вариантами осуществления, такое как количество в диапазоне [0, 1], [-1, 1], [1, 100] и так далее. В некоторых вариантах оценка S события может быть основана не на весе сигнала (например, вес для каждого сигнала является унитарным или несуществующим) или оценка события может не содержать сигнал вообще (например, сигнал выключен, его вес сигнала является нулевым и т.д.). В качестве другого примера, когда устройство 112 адаптивного управления объединяет несколько сигналов в едином фильтре 432 события, оценка S события может представлять собой некоторую математическую функцию сигналов и их соответствующий вес сигнала. Например, оценка события S может представлять собой линейную комбинацию набора сигналов xi и их соответствующего веса сигнала аi:
 .
.
В некоторых вариантах процесс 600 может таким способом определить оценку S события для каждого события или субсобытия (например, для каждого фильтра 432 события в представлении события).
Конечно, специалисты в данной области техники должны понимать, что предшествующие выражения оценки S события являются просто примерными. Может использоваться любое математическое сочетание сигналов и/или весов сигналов, чтобы определить оценку события для конкретного события или субсобытия при том, что соответствующее представление события разрешает это. Например, оценка S события может быть дана как произведение сигналов и их весов (например, 
В некоторых вариантах осуществления процесс 600 может содержать сравнение сформированного набора оценок событий с соответствующим набором порогов событий в наборе фильтров 432 событий (этап 610). Как описано выше, порог события может представлять собой значение или меру, определяющую, когда произошло событие или субсобытие, основываясь на одном или более входных сигналах. В некоторых вариантах осуществления порог события может быть основан на классе события (например, как определено на этапе 604), типе события для класса события (например, события поворота, события скорости и т.д. общего события вождения) и/или наборе факторов события. В некоторых вариантах фактор события может представлять собой численную меру взаимно коррелированной информации, относящейся к определению того, произошло ли событие или субсобытие. Информация, связанная с факторами события, может контролироваться устройством 112 адаптивного управления, приниматься от центра 132 управления (например, отражаться в одном или более принятых граничных условиях), собираться от внешней системы 142, основываться на переменных 422 управления, граничных условиях и/или на любом сочетании таких процедур.
Например, набор факторов события может содержать основной пороговый фактор, отражающий фиксированное значение. В некоторых вариантах осуществления основной пороговый фактор может основываться на классе события и/или на типе события для события или субсобытия. Например, событие поворота может иметь первый основной пороговый фактор, тогда как событие скорости имеет второй, отличающийся базисный пороговый фактор.
Набор факторов событий может также содержать фактор стандартного поведения, отражающий стандартную или ранее сложившуюся практику вождения водителя. Фактор стандартного поведения может быть основан на такой информации, как поведение водителя при вождении (например, скорость, положение, ускорение, поворот, торможение и т.д.) за некоторый умеренный промежуток времени (например, несколько дней, недель или месяцев). Фактор стандартного поведения может быть также основан на истории исков водителя, общей статистике вождения и одном или более параметрах транспортного средства, отражающих физические или технические характеристики транспортного средства 110.
Набор факторов события может также содержать фактор персонального состояния, отражающий текущее поведение водителя при вождении. В некоторых вариантах фактор персонального состояния может быть основан на поведении водителя при вождении за короткий, непосредственно предшествующий промежуток времени (например, за несколько минут, секунд, часов и т.д.). Фактор персонального состояния может также быть основан на времени суток, информации о поездке (например, полученной от навигационной системы или измеренной устройством 112 адаптивного управления), информации о социальной сети и информации устройства водителя (например, биоритмы, данные сна, текстовая информация, музыка, которую водитель слушает, запланированные маршруты и т.д.).
Набор факторов события может также содержать фактор граничного условия отражающий информацию, связанную с одним или более граничными условиями, принятыми от системы 132 управления. Фактор граничного условия может быть основан на любом граничном условии и сопутствующий основополагающей информации, такой как погодные условия, условие типа дороги, условие черной точки, условие карты средней скорости, условие обычного маршрута и т.д.
В некоторых вариантах факторы событий могут непрерывно или периодически обновляться. В некоторых вариантах осуществления каждый фактор события может быть связан с соответствующим периодом обновления. Период обновления может представлять собой продолжительность времени между последовательными обновлениями информации о факторе события (например, прием информации от системы 132 управления, локальное формирование информации устройства 112 адаптивного управления и т.д.) Период обновления может быть основан на факторе события. Например, фактор основного порога может никогда не обновляться, поскольку он фиксирован. В другом примере фактор стандартного поведения может иметь период обновления один раз в неделю, два раза в неделю, один раз в месяц и т.д. В еще одном примере фактор персонального состояния и фактор граничного условия могут иметь более короткий период обновления, такой как тридцать или шестьдесят секунд. В некоторых вариантах раскрытые варианты осуществления могут динамично регулировать любую другую соответствующую информацию, основываясь на изменении информации, связанной с факторами события (например, обновляя набор переменных 422 управления, повторно вычисляя пороги события и т.д.).
Кроме того, набор факторов события для определенного события или субсобытия может зависеть от класса события, типа события или субсобытия основополагающего события, поскольку другие классы события, типы события и субсобытия имеют другие факторы события, и весовая информация, иначе связанная с каждым фактором события, имеет другое влияние на порог события и т.д. Набор факторов события может также быть основан на сигналах, используемых при сравнении с порогом события (например, сигналы, используемые для формирования соответствующей оценки события). Поэтому, не вся информация, связанная с каждым фактором события, может быть реализована, запрошена или принята для каждого события, и не каждый фактор события может быть одинаково взвешен, как описано ниже.
Процесс 600 может формировать порог события для каждого фильтра 432 события в наборе фильтров события, чтобы создать набор порогов события. В некоторых вариантах осуществления порог события может быть основан на классе события для события, его типе события и/или наборе факторов события. В одном из вариантов осуществления, например, порог Т события для фильтра 432 события может представлять собой фактор события f, взвешенный с весом w фактора:
T=wf.
В некоторых вариантах вес фактора может представлять собой степень взаимосвязи, воздействия, корреляции, ассоциации или значимости фактора для события или субсобытия. Низкий вес фактора может представлять собой отсутствие строгой корреляции соответствующего фактора с возникновением события или субсобытия, высокий вес фактора может представлять собой сильную корреляцию и так далее. Вес фактора может принимать любое соответствующее значение, совместимое с раскрытыми вариантами осуществления, такое как значение в диапазоне [0, 1], [-1, 1], [1, 100] и т.д. В некоторых вариантах порог Т события может не основываться на весе фактора (например, вес для каждого фактора является единичным), или порог события может не содержать фактор вообще (например, вес фактора равен нулю и т.д.). В качестве другого примера, порог Т события может быть основан на некоторой математической функции факторов события и их соответствующих весах факторов. Например, порог Т события может представлять собой произведение факторов fi событий и их соответствующие веса wi факторов
 .
.
В некоторых вариантах процесс 600 может таким способом определять порог Т события для каждого события или субсобытия (например, для каждого фильтра 432 события в представлении события).
Подобно проведенному выше обсуждению оценок события, специалисты в данной области техники должны понимать, что приведенные выше выражения для порога Т события являются просто примерными. Любая математическая комбинация факторов и/или весов факторов может обеспечивать порог Т события для определенного события, или субсобытия при условии, что соответствующее представление события это разрешает. Например, порог Т события может быть представлен как линейная комбинация факторов события и их весов факторов (например, 

В некоторых вариантах набор весов факторов может также представлять собой значимость, взаимоотношение, ассоциацию и т.д. между информацией о компоненте, содержащей фактор события, и самим фактором. Беря фактор персонального состояния в качестве примера, этот фактор может взвешивать архивные данные непосредственно предшествующего вождения водителем с более или менее большим весом, чем информацию о социальной сети. Набор весов факторов может представлять собой это взвешивание информации о компонентах (например, о каждом субфакторе) для каждого фактора. Таким образом, в некоторых вариантах каждый субфактор может быть связан с соответствующим весом фактора и/или периодом обновления, который, в свою очередь, может быть основан на факторе события, для которого субфактор служит компонентом. Например, если фактор события fi состоит из субфакторов tij, то значение фактора события fi может содержать веса своих субфакторов, как в нижеследующем примерном соотношении
 ,
,
где wj отражает вес фактора для субфактора j фактора i события. Расширяя этот пример, процесс 600 может затем определить порог Т события для этого фильтра 432 события, чтобы ввести эти веса субфакторов для каждого фактора события:
 .
.
Кроме того, каждый фактор события может быть связан с его собственным факторным весом, отдельным от факторных весов его субфакторов так, чтобы каждый фактор события был также отдельно взвешен:
 .
.
Однако, как отмечено выше, эти выражения предназначены только для иллюстративных целей. Раскрытые варианты осуществления рассматривают любой тип математического соотношения, выражающего порог события с точки зрения весов факторов его компонентных субфакторов (например, линейные комбинации, полиномиальные представления, статистические характеристики и т.д.).
В некоторых вариантах, процесс 600 может содержать сравнение набора оценок события для набора порогов события, чтобы определить, произошло ли событие (этап 612). Процесс 600 может определить, что событие произошло, основываясь на сравнении набора оценок события (например, определенных на этапе 608) с соответствующим порогом события (например, определенным на этапе 610), основываясь на представлении события для события. В некоторых вариантах осуществления, таких, когда только применяется один фильтр события, процесс 600 может определить возникновение события, когда оценка события превышает порог события S>T. В других вариантах осуществления, таких как когда применяется несколько фильтров 432 события (например, как определено в представлении события), процесс 600 может определить, когда событие произошло, основываясь на логической комбинации результатов каждого сравнения между оценками события и порогами события (например, через комбинационную логику 434 и представление события). Эта логическая комбинация может использовать любую перестановку логических операторов, таких как AND (И), OR (ИЛИ), XOR Исключающее ИЛИ) и/ли NOT (НЕ), отражающую представление события в логических терминах, как описано со ссылкой на фиг. 4.
В качестве расширенного примера, представьте, что устройство 112 адаптивного управления делает выборку двух сигналов x1 и x2 (например, тангаж и рыскание), чтобы определить, произошло ли событие E. Представим, что эти сигналы связываются с весами a1 и a2 сигналов. Дополнительно предположим, что порог события для E содержит эти четыре фактора, перечисленные выше, сокращенно BTF, SBF, PSF, BCF, каждый из которых образован многими субфакторами и каждый вес фактора единичен (например, нет никаких коэффициентов веса). Наконец, предположим, что сформированное представление события использует приведенное выше выражение события для оценки события (например, линейная комбинация) и порога события (например, произведение факторов события). Любые или все эти параметры могут быть основаны (и управляться) на переменных 432 управления, хранящихся в устройстве 112 адаптивного управления. В первом примере при этих условиях устройство 112 адаптивного управления может определить, что E произошло, когда

Во втором примере при этих условиях предположим взамен, что представление события отражает, что оба сигнала подвергаются воздействию их собственного фильтра 432 события и что E происходит, когда оба фильтра события для субсобытий дают в ответ сигнал истинности. Устройство 112 адаптивного управления может тогда определить, что E произошло, когда

Как объяснялось выше, такие выражения подразумеваются как иллюстративные и не ограничивают раскрытые варианты осуществления конкретными выражениями.
Когда процесс 600 определяет, что событие не произошло, основываясь на наборе оценок события и наборе порогов события, процесс 600 может завершиться (этап 614), чтобы продолжить дополнительную обработку, совместимую с раскрытыми вариантами осуществления (например, обновление переменных 422 управления, передача информации центру 132 управления и т.д.). Когда процесс 600 определяет, что событие произошло, процесс 600 может передать данные о событии удаленной системе, такой как система 132 управления (этап 616). Данные события могут принимать любую форму и содержат любую информацию, совместимую с раскрытыми вариантами осуществления, такими, как описано со ссылкой на этап 312 на фиг. 3. Например, данные события могут содержать уведомление, что событие произошло, чтобы система 132 управления могла принять эту информацию и провести дополнительную обработку (например, как описано со ссылкой на фиг. 8).
Когда процесс 600 определяет, что набор сигналов отражает случай класса события для потенциального события аварии (этап 618), процесс 600 может выполнить операции, подобные описанным выше. Например, процесс 600 формирует или определяет представление события, представляющее событие аварии как конкретную комбинацию фильтров 432 события для набора сигналов. Процесс 600 может также формировать набор оценок события для события аварии, основываясь частично на представлении события (например, основываясь на расположении фильтров 432 события) (этап 620). Процесс 600 может затем сформировать набор порогов события и сравнить каждую оценку события в наборе оценок события с соответствующим порогом события (этап 622).
В некоторых вариантах пороги события для события аварии могут быть определены способом, аналогичным способу для событий вождения. Например, набор порогов события может быть основан на классе событий для события (например, для события аварии), типе события (например, типе аварии) и/или наборе факторов события. Набор факторов события может основываться на классе события и/или на типе события в дополнение к другой информации, совместимой с раскрытыми вариантами осуществления. Факторы события для события аварии могут быть теми же самыми или отличаться от факторов события управления. В одном из вариантов осуществления, например, событие аварии может быть связано с различными факторами события из события вождения. Кроме того, каждый фактор в наборе факторов события может также быть связан с соответствующим периодом обновления и может сохраняться способами, подобными описанным выше. Набор факторов события может также быть связан с набором весов факторов, имеющих отношение к факторам события и/или их субфакторам, совместимым с предшествующими вариантами осуществления.
Например, набор факторов события может содержать фактор устройства, отражающий информацию, связанную с установкой устройства 112 адаптивного управления и его взаимосвязью с транспортным средством 110. В некоторых вариантах, например, фактор устройства может содержать информацию, связанную с типом устройства, связанную с устройством 112 адаптивного управления, положением и качество установки устройства 112 адаптивного управления внутри транспортного средства 110 и/или с одним или более параметрами транспортного средства, такими как тип транспортного средства.
Набор факторов события может также содержать относительный пороговый фактор, отражающий усредненное поведение всех транспортных средств в пределах определенного класса парка транспортных средств 110. В некоторых вариантах осуществления класс парка транспортных средств 110 может содержать схожие или все автомобили, расположенные в одном и том же городе, районе и т.д. транспортного средства 110. Дополнительно или альтернативно, класс парка транспортных средств 110 может содержать некоторых или все транспортные средства для всех водителей, имеющих схожий профиль вождения (например, основанный на контролируемом или хранящемся поведении при вождении), и т.д.
Набор факторов событий может содержать текущий фактор опасности, связанный с транспортным средством 110. В некоторых вариантах текущий фактор опасности может быть основан на индексе опасности, в настоящий момент связанном с транспортным средством 110, таком как индекс опасности, принятый от центра 132 управления или сформированный устройством 112 адаптивного управления и запомненный в памяти. Как описано здесь, индекс опасности может представлять собой степень воздействия опасности или небезопасного вождения, связанных с транспортным средством 110. Текущий фактор опасности и/или индекс опасности могут быть основаны, например, на обнаружении, что произошло опасное событие, такое как событие резкого торможения, событие внезапной остановки, событие смены скоростной полосы или другой тип события, совместимого с поведением при вождении перед воздействием.
Набор факторов события может содержать погодный фактор, отражающий текущие погодные условия вокруг транспортного средства 110. В некоторых вариантах осуществления этот фактор может быть основан на информации, содержащейся в условиях погоды, полученных от центра 132 управления и/или в условиях окружающей среды, обнаруженные датчиками 114, такими как датчики температуры, влажность, уровни осадков и т.д.
Набор факторов события может также содержать фактор уровня обслуживания, отражающий информацию, связанную с соглашением об уровне обслуживания с водителем транспортного средства 110. В некоторых вариантах фактор уровня обслуживания может быть основан на объеме и/или типе информации, которую водитель разрешил устройству 112 адаптивного управления и/или системе 132 управления собирать, контролировать, обнаруживать, обрабатывать или получать.
Используя эти факторы события и/или факторы, описанные выше со ссылкой на события вождения, процесс 600 может формировать набор порогов событий, используя выражения и соображения, объясненные выше. В некоторых вариантах осуществления процесс 600 может формировать порог события для каждого фильтра 432 события в наборе фильтров события, так чтобы можно было сравнить набор оценок события с набором порогов событий (этап 622). Например, процесс 600 может вычислить порог Т события для каждого фильтра 432 события, основываясь на наборе весов wi факторов (например, управляя факторами или субфакторами их компонент) и на каждом факторе события, таком как примерное соотношение 
Процесс 600 может содержать сравнение набора оценок события с набором порогов события, чтобы определить, произошло ли событие (этап 624) способом, подобным вышеупомянутым процессам, таким как описано со ссылкой на этапе 612. Например, процесс 600 может определить, что событие произошло, основываясь на сравнении набора оценок события (например, из этапа 620) с соответствующим порогом события (например, из этапа 622). Это определение может быть основано, например, на представлении события, отражающем математическую и/или логическую комбинацию фильтров 432 события и/или сигналы, символизирующие событие. Как описано выше, процесс 600, может затем быть завершен (этап 614), когда событие не обнаружено, чтобы продолжить обработку, совместимую с раскрытыми вариантами осуществления. Когда процесс 600 обнаруживает событие, процесс 600 может, как раскрыто здесь, передать данные события системе 132 управления.
Различные параметры процесса 600 могут управляться набором переменных 422 управления, хранящимся на устройстве 112 адаптивного управления. В одном из примеров набор переменных 422 управления может управлять процессами, связанными с существующими классами события (например, характеристики и типы доступных классов), типами события (например, доступные типы управления событиями, такими как событие поворота, событие скорости и т.д.), модели классификации события (например, профили модели сигнала, как применяются модели, как соответствующая модель выбирается для транспортного средства, основываясь на параметрах транспортного средства), меры корреляции (например, как мера вычисляется для заданного набора сигналов или профилей), и/или пороги классификации (например, значение порога, как каждый порог меняется в зависимости от класса/типа события, и т.д.) и т.д. В другом примере набор переменных 422 управления может управлять процессами, связанными с набором оценок события (например, как оценка события вычисляется в качестве функции набора сигналов), порогами события (например, как порог события вычисляется в качестве функции факторов события), факторами события (например, субфакторами, содержащимися в каждом факторе, наборами факторов, используемых для вычисления порога события), весами сигналов и весами факторов (например, значениями различных весов, применяется ли вес факторов к субфакторам), и т.п.Любое количество переменных, представление, уравнение, соотношение и т.д. процесса 600 могут управляться набором переменных 422 управления и список некоторых параметров или их сопутствующей информации, приведенной выше, не предназначен служить ограничением.
В некоторых вариантах формирование или определение любого параметра, описанного выше, (например, обнаружение события, вычисление порога события или оценка события, определение представления события и т.д.) может заставить устройство 112 адаптивного управления изменить набор рабочих переменных 422 управления (например, через ответный сигнал 448). Например, в одном из вариантов осуществления устройство 112 адаптивного управления может обновить набор переменных 422 управления после обнаружения возникновения или отсутствия возникновения события. Изменения в наборе переменных управления могут заставить устройство 112 адаптивного управления динамично регулировать раскрытые варианты осуществления (например, регулируя параметр, раскрытый со ссылкой на фиг. 3-8), основываясь на обнаруженных изменениях. Например, устройство 112 адаптивного управления может регулировать любой из указанных выше параметров в ответ на изменение в рабочем наборе переменных управления. Устройство 112 адаптивного управления может автоматически и непрерывно контролировать изменения в наборе переменных 422 управления, так чтобы оно могло динамично регулировать параметры в раскрытых вариантах осуществления в ответ на обнаруженное изменение. Кроме того, любой вариант вышеупомянутых параметров или их сопутствующей информации может передаваться в центр 132 управления, чтобы проводить дополнительную обработку, совместимую с раскрытыми вариантами осуществления.
На фиг. 7 показана блок-схема последовательности выполнения операций примерного процесса 700 проверки подтверждения события, совместимого с раскрытыми вариантами осуществления. Варианты, раскрытые со ссылкой на процесс 700, могут быть реализованы через аппаратные средства и/или программное обеспечение на одной или более компьютерных системах в среде 100, таких как устройство 112 адаптивного управления и система 132 управления. Некоторые варианты процесса 700 могут быть перестроены, реорганизованы, повторены, исключены, дополнены, модифицированы или интегрированы в дополнительные процессы способами, совместимыми с раскрытыми вариантами осуществления. Например, варианты осуществления, описанные со ссылкой на процесс 700, могут быть реализованы в устройстве 112 адаптивного управления, чтобы подтвердить возникновения обнаруженного события, как это описано со ссылкой на этап 312 последующей обработки, показанный на фиг. 3.
Процесс 700 может содержать обнаружение события, совместимое с раскрытыми вариантами осуществления (этап 702). В некоторых вариантах это обнаружение событий может содержать варианты процессов обнаружения событий, раскрытых со ссылкой на фиг. 3, 4 и 6. Например, процесс 700, может содержать обнаружение события аварии с помощью устройства 112 адаптивного управления, используя раскрытые здесь процессы. В некоторых вариантах осуществления процесс 700 может произойти только после обнаружения некоторых классов событий (например, событий аварии) или определенного типа события. В одном из вариантов осуществления, например, процесс 700 может произойти только в ответ на обнаружение события аварии.
Процесс 700 может содержать контроль набора сигналов с помощью устройства 112 адаптивного управления в ответ на обнаружение события (этап 704). Набор сигналов может быть фиксирован или может зависеть от класса события для обнаруженного события, его типа события или набора переменных 422 управления и т.д. Например, в одном из вариантов осуществления процесс 700 может измерять сигналы, таких, которые связаны со скоростью, продольным ускорением, рысканием и расстоянием. Процесс 700 может контролировать набор сигналов для периода времени, равного периоду наблюдения (например, пятнадцать секунд, тридцать секунд, одна минута и т.д.) после обнаружения, когда произошло событие. В некоторых вариантах период наблюдения может быть основан на классе события, типе события, наборе контролируемых сигналов, наборе рабочих переменных 422 управления и т.д. В других вариантах период наблюдения может оставаться фиксированным.
Процесс 700 может выполнять анализ сигналов для контролируемых сигналов, чтобы подтвердить событие (этап 706). Выполнение анализа сигналов для контролируемых сигналов может содержать формирование меры подтверждения, связанной с набором контролируемых сигналов, и сравнения ее с порогом подтверждения. В некоторых вариантах осуществления мера подтверждения может представлять собой вероятность или степень уверенности, что обнаруженное событие действительно произошло. В некоторых вариантах мера подтверждения может быть основана на наборе весов подтверждения, отражающем степень соотношения или корреляции между сигналом и обнаруженным событием как функцию набора параметров подтверждения. Набор параметров подтверждения может представлять базис для весов подтверждения, так чтобы любой вес подтверждения мог быть создан как выражение параметров подтверждения. Например, набор параметров подтверждения может содержать тенденцию скорости перед обнаруженным событием (например, за некоторый период времени), тип дороги, по которой движется транспортное средство 110, время суток и погодные условия.
В некоторых вариантах процесс 700 может определить меру подтверждения как функцию набора контролируемых сигналов и весов подтверждения. Это выражение может принимать любую соответствующую математическую или статистическую форму, совместимую с раскрытыми вариантами осуществления. Например, для заданного набора контролируемых сигналов x (например, скорость, продольное ускорение, рыскание и расстояние, основанные на классе события), процесс 700 может определить меру подтверждения V, используя набор параметров v подтверждения:
где fi (v) отражает вес подтверждения для сигнала i, выраженного как функция f параметров v подтверждения. Как и для выражений события оценки и события порога, приведенное выше соотношение подразумевается как примерное. Специалисты в данной области техники должны понимать альтернативные выражения для меры подтверждения (например, как простой или сложной функций), основываясь на наборе параметров подтверждения и входных сигналах.
Процесс 700 может содержать сравнение определенной меры подтверждения с порогом подтверждения, чтобы подтвердить событие (этап 708). В некоторых вариантах осуществления порог подтверждения отражает минимальную вероятность или степень уверенности, необходимую для подтверждения, что обнаруженное событие произошло. Порог подтверждения может быть фиксированным или основываться на других соображениях, таких как класс события или тип события для обнаруженного события, контролируемые сигналы, используемые параметры подтверждения и т.д. Когда процесс 700 определяет, что мера подтверждения не превышает порог подтверждения, событие не может быть подтверждено и процесс 700 может завершиться, чтобы облегчить дополнительную обработку (этап 710). Альтернативно, когда процесс 700 определяет, что мера подтверждения превышает порог подтверждения, процесс 700 подтверждает события (этап 712). В некоторых вариантах осуществления такой процесс может содержать сохранение информации, связанной с такой проверкой подтверждения в памяти, и проведение дополнительной обработки, такой как обновление набора рабочих переменных 422 управления, основываясь на проверке подтверждения. Кроме того, процесс 700 может передавать данные подтверждения системе 132 управления (этап 714). В некоторых вариантах данные подтверждения могут принимать форму, схожую с данными события, и могут содержать любую информацию, связанную с подпрограммами подтверждения процесса 700. Например, данные подтверждения могут содержать индикацию, что обнаруженное событие было подтверждено, значение меры подтверждения или порог подтверждения, набор контролируемых сигналов, набор используемых параметров события и т.д. Данные подтверждения могут принимать любую соответствующую форму, совместимую с раскрытыми вариантами осуществления, такую как сигнал, компьютерный файл и т.д.
Различные параметры процесса 700 могут управляться набором переменных 422 управления, хранящимся на устройстве 112 адаптивного управления. В одном из примеров набор переменных 422 управления может управлять процессами, связанными с контролем сигналов (например, определение периодов наблюдения, набор контролируемых сигналов, и т.д.) и/или выполнять анализ сигналов (например, определение порога подтверждения, определение параметров подтверждения и весов подтверждения, определение, как вычислить порог подтверждения, заданный набор параметров подтверждения и набор сигналов, и т.д.). Любое количество переменных, представление, уравнение, соотношение и т.д. процесса 700 могут управляться набором переменных управления и список некоторых параметров или связанной с ними информации, приведенный выше, не предназначен для создания ограничения. Кроме того, формирование или определение любого параметра, описанного со ссылкой на процесс 700, могут вызвать изменение в наборе рабочих переменных 422 управления (например, через ответный сигнал 448). Например, устройство 112 адаптивного управления может обновить набор переменных управления после подтверждения возникновения обнаруженного события. Изменения в наборе переменных 422 управления могут заставить устройство 112 адаптивного управления динамично регулировать раскрытые варианты осуществления (например, регулируя параметр, раскрытый со ссылкой на фиг. 3-8), основываясь на обнаруженных изменениях. Например, устройство 112 адаптивного управления может регулировать любой из упомянутых выше параметров в ответ на изменение в рабочем наборе переменных управления. Устройство 112 адаптивного управления может автоматически и непрерывно контролировать изменения в наборе переменных 422 управления, так чтобы оно могло динамично регулировать параметры в раскрытых вариантах осуществления в ответ на обнаруженное изменение. Кроме того, любой вариант вышеупомянутых данных или параметров и связанной с ними информации может быть передан внешней системе (например, системе 132 управления), чтобы провести дополнительную обработку, совместимую с раскрытыми вариантами осуществления.
На фиг. 8 показана блок-схема последовательности выполнения операций примерного процесса 800 формирования граничных условий и индексов опасности, совместимого с раскрытыми вариантами осуществления. Варианты, раскрытые со ссылкой на процесс 800, могут быть реализованы аппаратными средствами и/или программным обеспечением на одной или более компьютерных системах в среде 100, таких как устройство 112 адаптивного управления и система 132 управления. Некоторые варианты процесса 800 перестроены, реорганизованы, повторены, исключены, дополнены, модифицированы или интегрированы в дополнительные процессы способами, совместимыми с раскрытыми вариантами осуществления. Например, варианты осуществления, описанные со ссылкой на процесс 800, могут быть реализованы в устройстве 112 адаптивного управления для установки граничных условий и индексов опасности, таких как описано со ссылкой на этап 302 на фиг. 3.
В некоторых вариантах процесс 800 может содержать прием набора сигналов или информации, связанной с обнаруженным событием, от устройства 112 адаптивного управления (этап 802). В некоторых вариантах осуществления процесс 800 может также принимать информацию и параметры, связанные с другими процессами, такими как, помимо прочего, процесс полосовой фильтрации, процесс обнаружения событий, и/или процесс подтверждения. Например, система 132 управления может принимать информацию, связанную с примененным фильтром нижних частот, сигналы, принимаемые через устройство 112 адаптивного управления, порог события, меру подтверждения и т.д. Такая принятая информация может содержать любую информацию, связанную с раскрытыми вариантами осуществления, и может поступать (например, может быть передана устройством 112 адаптивного управления) на любом этапе описанных выше процессов.
Процесс 800 может содержать определение набора граничных условий, основываясь на принятой информации, чтобы предоставить его устройству 112 адаптивного управления (этап 804). В некоторых вариантах определение набора граничных условий может содержать идентификацию набора возможных событий, подразумеваемых принятыми сигналами, и определение одного или более граничных условий, относящихся к набору возможных событий. Например, система 132 управления может принимать от устройства 112 адаптивного управления сигнал скорости, указывающий, что транспортное средство 110 перемещается с высокой скоростью. В ответ, система 132 управления может определить, что высокие скорости, например, часто связываются с событиями скорости, событиями аварии, событиями торможения и т.д. Система 132 управления может дополнительно определить, что граничные условия, часто пригодные для этих событий, содержат, например, условие типа дороги (например, чтобы учесть высокоскоростные магистрали), условие погоды (например, гарантировать, что водитель не повышает скорость при дожде), условие карты средней скорости (например, чтобы измерить или сравнить водителя с теми, кто находятся вблизи него), и/или сравнить фактор персонального состояния с фактором стандартного поведения (например, чтобы сравнить водителя с его типичными коллегами). Эти идентифицированные граничные условия могут содержать набор определенных граничных условий. Конечно, возможны и другие варианты граничных условий и приведенный выше пример обеспечивается только для целей иллюстрации. В некоторых вариантах система 132 управления может хранить в памяти событие отображения, которое отображает наблюдаемые тенденции, профили или отличительные признаки набора сигналов в наборе потенциальных событий. Кроме того, система 132 управления может хранить отображение граничных условий, отображающее набор потенциальных событий в наборе соответствующих граничных условий. Таким способом система 132 управления может определить соответствующие граничные условия, сравнивая значения набора датчиков с отображением событий, чтобы идентифицировать потенциальные события и, в свою очередь, идентифицировать набор соответствующих граничных условий, основываясь на идентифицированных потенциальных событиях, используя отображение граничных условий.
Процесс 800 может содержать сбор, накопление и формирование информации, связанной с набором идентифицированных граничных условий (этап 806). Эта информация может представлять собой данные, относящиеся к идентифицированным граничным условиям, и может зависеть от набора идентифицированных граничных условий. Например, если процесс 800 идентифицирует погодное условие или условие социальной сети, процесс 800 может собрать или сформировать информацию, связанную с погодными условиями, окружающими транспортное средство 110 (например, текущими или ожидаемыми, основываясь на предсказанном маршруте, как описано выше), или может собирать информацию из одного или более сайтов социальных сетей, связанных с водителем. Процесс 800 может собирать и другие типы информации, в зависимости от набора идентифицированных граничных условий. Информация, собранная или сформированная процессом 800, может быть создана локально (например, в системе 132 управления) или может быть получен от удаленных систем (например, от внешней системы 142). Например, если процесс 800 идентифицировал условие социальной сети или условие устройства, процесс 800 может получить запрошенную информацию от нескольких внешних систем 142, отражающих устройства водителя (например, от смартфона, от носимых устройств, таких как смарт-часы, навигационные системы и т.д.), и серверов, связанных с одними или более сайтами социальных сетей. Процесс 800 может содержать получение данных от внешних систем 142, хранящих информацию о трафике, информацию о погоде и т.д. В другом примере процесс 800 может происходить локально на системе 132 управления так, когда система управления формирует информацию, связанную с полученными ранее условиями вождения водителя (например, основанную на контролируемых сигналах от устройства 112 адаптивного управления), и т.д. Информация, собранная или сформированная таким способом, может содержать любую информацию, совместимую с раскрытыми граничными условиями, такую как информация о погоде, карты скорости транспортного средства, условия трафика, статистика водителя, дорожная информация или другая информация, описанная со ссылкой на фиг. 3.
Процесс 800 может также содержать предоставление граничных условий и/или сопутствующей информации устройству 112 адаптивного управления для дополнительной обработки (этап 808). Процесс 800 может предоставлять граничные условия и другую информацию по любой соответствующей системе связи (например, по системе 120 связи). Предоставленные граничные условия и другая информация могут принимать любую соответствующую форму, такую как сигнал, компьютерный файл и т.д. В некоторых вариантах осуществления устройство 112 адаптивного управления может принимать граничные условия и сопутствующую информацию от системы 132 управления для проведения описанных здесь дополнительных процессов. Например, в некоторых вариантах устройство 112 адаптивного управления может обновлять набор переменных 422 управления, основываясь на принятой информации (например, обновляя набор внешних переменных 426, чтобы учесть новый набор граничных условий). Устройство 112 адаптивного управления может также хранить информацию, связанную с новым набором граничных условий, например, чтобы определить дополнительные изменения переменных 422 управления, или использовать ее в раскрытых процессах, таких как обнаружение событий и т.д. Таким способом устройство 112 адаптивного управления может использовать информацию, принятую от центра 132 управления, чтобы управлять изменениями в своем внутреннем процессе и динамично регулировать, как собирать и обрабатывать данные. Процесс 800 может продолжать контролировать принятые от устройства 112 адаптивного управления сигналы или другую информацию (например, основываясь на обновленных граничных условиях), чтобы начать процесс снова (этап 802).
В некоторых вариантах осуществления процесс 800 может содержать формирование индекса опасности, связанного с водителем или транспортным средством 110 (этап 810). Этот индекс опасности может быть основан на информации, принятой от устройства 112 адаптивного управления (этап 802) и/или на любых идентифицированных граничных условиях, ранее сформированные или вновь определенных (например, на этапе 804). В некоторых вариантах процесс 800 может определять индекс опасности, основываясь на информации, хранящейся или сформированной в системе 132 управления, и/или на информации, контролируемой устройством 112 адаптивного управления. Процесс 800 может определить значение индекса опасности, используя формулы, веса, и параметры, совместимые с раскрытыми выше (например, средние веса, изделия, функции различных параметров и т.д.). В одном из вариантов осуществления процесс 800 может определить значение индекса опасности, основываясь на поведении водителя при вождении. Процесс 800 может идентифицировать поведение водителя, основываясь на сигналах или другой информации, принятой от устройства 112 адаптивного управления (например, сигналы скорости, ускорения, поворота, торможения и/или положения; обнаружение событий вождение, таких как события ускорения или движения на повороте, и т.д.), а также на информации, хранящейся в системе 132 управления (например, сложившееся в прошлом поведение водителя при вождении и статистика).
В некоторых вариантах осуществления индекс опасности может также быть основан на внимании водителя. Процесс 800 может определить меру внимания водителя, основываясь на информации, связанной с текущими граничными условиями. Например, процесс 800 может измерять внимание водителя, основываясь на таких данных, как условие устройства (например, указывающее, что водитель отправляет текстовое сообщение во время вождения), условие карты средней скорости (например, указывающее, что водитель управляет на скорости, существенно отличающейся из других водителей, находящихся поблизости для данного периода времени), и других подобных граничных условиях. Дополнительно или альтернативно, процесс 800 может измерять внимание водителя, основываясь на сигналах или информации, принятой от устройства 112 адаптивного управления, таких как присутствие нескольких событий поворота или событий ускорения в пределах кратковременного временного окна.
В некоторых вариантах индекс опасности может также быть основан на информации, связанной со средой транспортного средства. Процесс 800 может измерять информацию об окружающей среде, используя данные, принимаемые от устройства 112 адаптивного управления (например, через температуру, влажность, уровни осадков), а также идентифицированные граничные условия и сопутствующие данные (например, условие погоды, в том числе, информацию о погоде, получаемую от внешней системы 142).
Процесс 800 может содержать предоставление сформированного индекса опасности устройству 112 адаптивного управления, чтобы провести дополнительную обработку (этап 812). Процесс 800 может предоставить индекс опасности по любому соответствующему каналу или системе связи. В некоторых вариантах устройство 112 адаптивного управления может принимать индекс опасности и, соответственно, обновлять свои внутренние процессы. Например, устройство 112 адаптивного управления может изменять набор рабочих переменных 422 управления, основываясь на новом значении индекса опасности (например, на замене или усреднении старого индекса), чтобы представлять собой обновленное воздействие опасности. В некоторых вариантах, например, различные пороги событий и/или пороги подтверждения могут быть обратно пропорциональными принятому индексу опасности (например, чтобы обнаружить больше событий в более опасной среде), частота выборки и/или веса сигналов могут быть прямо пропорциональны индексу опасности (например, чтобы делать выборку более часто во времена опасности), определенные сигналы, факторы, и/или их соответствующие веса могут стать более или менее подходящими, и т.п. Устройство 112 адаптивного управления может сравнить новый индекс опасности со старым, определить необходимые изменения, которые необходимо сделать в своих внутренних процессах, и модифицировать набор рабочих переменных 422 управления, чтобы привести в действие эти изменения (например, изменяя набор переменных 426 внешнего управления).
Процесс 800 может также содержать выполнение внутренней обработки, основываясь на обновленном индексе опасности и/или другой информации, связанной с процессом 800 (этап 814). В некоторых вариантах, например, процесс 800 может содержать предоставление водителю уведомления, основываясь на вновь определенном индексе опасности и/или на информации о граничном условии. Уведомление может содержать информацию, связанную с индексом опасности, такую как индикация, что манера, в которой управляет водитель, является более опасной или более безопасной, по сравнению с ранее определенным индексом опасности, ранее полученными средними значениями индексов опасности для водителя или подобным образом расположенных водителей, и т.д. Уведомление может также содержать информацию, связанную с набором граничных условий, таких как индикация особенностей или поведения водителя при вождении со ссылкой на одно или более граничных условий. Например, уведомление может указывать, что водитель движется слишком быстро во время дождливых погодных условий, что водитель имеет события меньшего движения на повороте или ускорения, чем те, которые аналогично расположены или имеют тот же самый тип транспортного средства, или любой другой тип индикации. Таким образом, уведомление может содержать вид анализа вождения, совместимый с раскрытыми вариантами осуществления и их сочетаниями. Это уведомление может содержать электронную почту, текстовое сообщение, автоматизированное речевое сообщение, поп-уведомление на дисплее мобильного устройства, или другой подобный формат. Процесс 800 может продолжать контролировать сигналы или другую информацию устройства 112 адаптивного управления после проведения его внутренних процессов, начиная процесс заново.
Дополнительно или альтернативно процесс 800 может содержать проведение внутренних процессов, связанных с центром 130 управления, используя систему 132 управления. Например, в одном из вариантов осуществления процесс 800 может содержать обновление одного или более страховых полисов, связанных с транспортным средством 110, основываясь на сигналах, принятых от устройства 112 адаптивного управления, сформированные индексы опасности и обнаруженные события (или их отсутствие). В некоторых вариантах, например, более низкие индексы опасности, отсутствие или нечастые события вождения или аварии, и сигналов, строго коррелированные со стандартным поведением при вождении, могут указывать, что водитель транспортного средства 110, в целом, является безопасным водителем. Процесс 800 может, таким образом, содержать определение изменения в существующем страховом полисе, связанном с транспортным средством 110, основываясь на сигналах, принятых от устройства 112 адаптивного управления, сформированных индексах опасности, идентифицированных граничных условиях и сопутствующей им информации, и результатах подтверждения события и обнаружения событий. Такие изменения могут содержать, например, обновленный страховой взнос, вычет, более низкие франшизы, дополнительные покрытия и т.д. Процесс 800 может дополнительно содержать обновление полиса, основываясь на определенном изменении, и/или предоставление уведомления водителю или определенному держателю страхового полиса, связанному с полисом, содержащего информацию, связанную с определенным изменением (например, что держатель страхового полиса имеет право на обновленную премию). Уведомление может принимать форму, подобную описанным выше.
Как должно быть очевидным из предшествующих вариантов осуществления, варианты раскрытых вариантов осуществления позволяют устройству 112 адаптивного управления динамично регулировать свои собранные сигналы, параметры, пороги и функции после обнаружения изменений в наборе переменных 422 управления, хранящихся в памяти. Как здесь описано, устройство 112 адаптивного управления может непрерывно или периодически контролировать рабочий набор переменных управления, чтобы определить, произошло ли изменение и, соответственно, можно ли динамично регулировать свои процессы. Кроме того, устройство 112 адаптивного управления может также определить одно или более изменений для их выполнения в наборе переменных 422 управления, основываясь на предшествующих процессах (например, описанных со ссылкой на фиг. 3-8), и самостоятельно обновлять переменные управления. Устройство 112 адаптивного управления может определить изменения в переменных 422 управления и их соответствующие влияния на внутренние процессы (например, пороги, функции, веса, сигналы выборки и т.д.), основываясь на характере обработанной информации.
Например, когда устройство 112 адаптивного управления принимает индекс опасности от центра 132 управления, устройство 112 адаптивного управления может обновить набор переменных 426 внешнего управления, хранящихся в памяти. Устройство 112 адаптивного управления может затем определить одно или более изменений для их применения к вариантам предшествующих вариантов осуществления, основываясь на новом индексе опасности, и, соответственно, динамично регулировать свои процессы (например, через сигнал 442 или 446 управления). Характер определенных изменений может быть основан на характере нового индекса опасности. Как описано выше, например, более высокий индекс опасности указывает на более опасное вождение. В некоторых вариантах устройство 112 адаптивного управления может поэтому изменить набор сигналов выборки на сигналы, основанные на сигналах, способствующих вождению (например, прежде всего, сигналы скорости, поворота и ускорения, а не сигналы температуры и влажности, и т.д.). Устройство 112 адаптивного управления может также изменить (например, увеличивать) частоты выборки этих или других сигналов так, чтобы собирать дополнительные и более точные данные. Устройство 112 адаптивного управления может также уменьшать частоты выборки других, менее важных сигналов во время повышенных индексов опасности. Дополнительно, устройство 112 адаптивного управления может модифицировать свою логику обнаружения событий, чтобы увеличивать ее чувствительность, также как уменьшать пороги событий (например, вручную, модифицируя факторы событий и веса событий, чтобы вызвать такое изменение, модифицируя представление события, чтобы регулировать математическое представление порога, и т.д.), увеличивать оценку события (например, вручную или изменяя сигналы и их веса аналогично изменению порогов событий), и так далее. Кроме того, устройство 112 адаптивного управления может модифицировать подобным способом свои процессы подтверждения, так чтобы уменьшать пороги подтверждения, увеличивать меры подтверждения, реализовывать изменения в базовых параметрах и функциях, чтобы вызвать эти изменения (например, увеличивая веса подтверждения, выбирая новые сигналы или параметры подтверждения и т.д.). Устройство 112 адаптивного управления может таким образом определять, как динамично регулировать любой входной сигнал, параметр или процесс, обсуждавшиеся здесь, в ответ на новые параметры 422 управления, вызванный приемом нового индекса опасности. Кроме того, устройство 112 адаптивного управления может определить, как динамично регулировать любой такой признак, основываясь на изменении наборе параметров управления, вызванном обработанной информацией (например, принятой от системы 132 управления или сформированной внутри устройства 112 адаптивного управления).
В качестве другого примера, устройство 112 адаптивного управления может принимать граничные условия от центра 132 управления и из связанной с ним информации. Устройство 112 адаптивного управления может определить, как модифицировать набор переменных 422 управления (например, набор переменных 426 внешнего управления, в частности) и соответствующие регулировки описанных выше процессов, основываясь на характере граничных условий и сопутствующих данных. В одном примере устройство 112 адаптивного управления может принимать погодное условие, когда никакое такое условие не было ранее установлено. Устройство 112 адаптивного управления может обновлять переменные 422 управления и динамично регулировать частоты выборки и сигналы, поступающие от датчиков 114, чтобы собирать информацию об окружающей среде (например, температура, уровни влажности, атмосферное давление и т.д.). Устройство 112 адаптивного управления может также обновлять свои процессы обнаружения событий и подтверждения, как описано выше, (например, модифицируя пороги событий, пороги подтверждения и/или их различные компоненты, такие как веса сигналов, факторы события, и т.д.), чтобы ввести учет погоды в события. В одном из вариантов осуществления, например, устройство 112 адаптивного управления может уменьшить пороги событий для дождливой погоды (например, потому что она более опасна), и увеличить пороги событий для умеренной или солнечной погоды. Устройство 112 адаптивного управления может также делать выборку некоторых типов сигналов в дождливых условиях более часто (например, скорость, движение на повороте, торможение, и т.д.), чем в солнечных условиях. Подобным образом, устройство адаптивного управления может динамично регулировать сигналы, частоты выборки, пороги и т.д. в описанных выше вариантах осуществления в ответ на условия трафика (например, из-за более высокой вероятности аварии при более высоких уровнях загруженности), дорожную информацию (например, делая выборку сигналов менее часто на прямых дорогах), и любую другую информацию о граничных условиях. Эти виды изменений могут быть применены к любому процессу с переменными, раскрытому здесь, и изменения могут основываться на характере информации о граничных условиях.
В конечном примере устройство 112 адаптивного управления может также определять, как обновлять набор переменных управления, основываясь на внутренних процессах. В качестве одного примера, устройство 112 адаптивного управления может определить, как изменять набор переменных 422 управления (например, переменные 424 внутреннего управления) и соответствующие регулировки предшествующих процессов, основываясь на характере обнаруженного события. Для примера, устройство 112 адаптивного управления может обнаруживать событие скорости, ускорения или поворота и определить, что такое событие обычно отражает более опасное или небезопасное поведение при вождении. В ответ, устройство 112 адаптивного управления может обновить набор переменных 422 управления и, соответственно, может динамично регулировать входные сигналы, параметры и процессы предшествующих вариантов осуществления (например, через управляющий сигнал 442). Например, устройство 112 адаптивного управления может регулировать набор сигналов выборки (например, чтобы способствовать сигналам, основанным на вождении, таким как скорость и ускорение) и/или их частоты выборки (например, делать выборку, основываясь на сигналах вождения, более часто, а выборку на основе условий окружающей среды менее часто). Кроме того, устройство 112 адаптивного управления может понижать пороги событий или пороги подтверждения в ответ на обнаруженное событие управления или увеличивать оценки событий и меры подтверждения, как описано выше, чтобы повысить чувствительность к определенным манерам вождения. Кроме того, устройство 112 адаптивного управления может производить обратные изменения в ответ на отсутствие таких событий (например, увеличивая пороги событий, снижая частоты выборки, и т.д.). Раскрытые варианты осуществления предполагают делать любое такое изменение в ответ на любую информацию или данные, сформированные в раскрытых вариантах осуществления. Дополнительно, эти изменения могут быть применены к любому процессу с переменными или параметру, раскрытым здесь. Характер регулировок и затрагиваемые входные сигналы, процессы и параметры будет зависеть от характера информации, сформированной в зависимости от фактической манеры вождения и условий окружающей среды, связанных с транспортным средством 110.
Предшествующее описание было представлено для целей иллюстрации. Оно не является исчерпывающим и не ограничивается точными формами или раскрытыми вариантами осуществления. Изменения и адаптация вариантов осуществления станут очевидны из рассмотрения описания и практики раскрытых вариантов осуществления. Например, описанные реализации содержат аппаратное и программное обеспечение, но системы и способы, совместимые с настоящим раскрытием, могут быть реализованы как одни только аппаратные средства.
Компьютерные программы, основанные на написанных описании и способах настоящего описания находятся в пределах знаний и умений разработчика программного обеспечения. Различные программы или программные модули могут создаваться, используя множество технологий программирования. Например, разделы программы или программные модули могут быть разработаны посредством Java, C, C++, ассемблера или любых таких языков программирования. Один или более таких разделов программного обеспечения или модулей могут быть интегрированы в систему устройства или в существующее программное обеспечение связи.
Кроме того, хотя здесь были описаны иллюстративные варианты осуществления, объем изобретения содержит любые и все варианты осуществления, имеющие эквивалентные элементы, модификации, отсутствия, сочетания (например, вариантов в различных вариантах осуществления), адаптации и/или изменения, основанные на настоящем раскрытии. Элементы в формуле изобретения должны интерпретироваться широко, основываясь на языке, используемом в формуле изобретения, и не ограничиваясь примерами, описанными в настоящем описании или во время отстаивания в судебном заседании, причем такие примеры должны рассматриваться как неисключительные. Дополнительно, этапы раскрытых способов могут модифицироваться любым способом, в том числе, путем переупорядочивания этапов и/или вставки или удаления этапов. Кроме того, любой параметр, условие, информация и т.д., описанные здесь, могут представлять собой сложившиеся ранее, текущие или ожидаемые значения этого параметра, условия или информации.
Признаки и преимущества раскрытия очевидны из подробного описания и, таким образом, подразумевается, что добавленная формула изобретения охватывает все системы и способы, которые находятся в пределах сущности и объема раскрытия. Неопределенные артикли, как они используются здесь, означают "один или больше". Аналогично, использование термина во множественном числе не обязательно означает множество, если это не очевидно в данном контексте. Такие слова как "и" или "или" означают "и/или", если конкретно не указывается иное. Дополнительно, поскольку многочисленные модификации и вариации будут легко доступны специалистам в данной области техники, не требуется ограничивать раскрытие точной конструкцией и операцией, показанными и описанными, и, соответственно, все соответствующие модификации и эквиваленты могут быть пересортированы, попадая в пределы объема раскрытия.
Другие варианты осуществления должны быть очевидны специалистам в данной области техники, исходя из рассмотрения описания и практической реализации раскрытых здесь вариантов осуществления. Подразумевается, что описание и примеры рассматриваются только как пример с истинным объемом и сущностью раскрытых вариантов осуществления, определяемых последующей формулой изобретения.



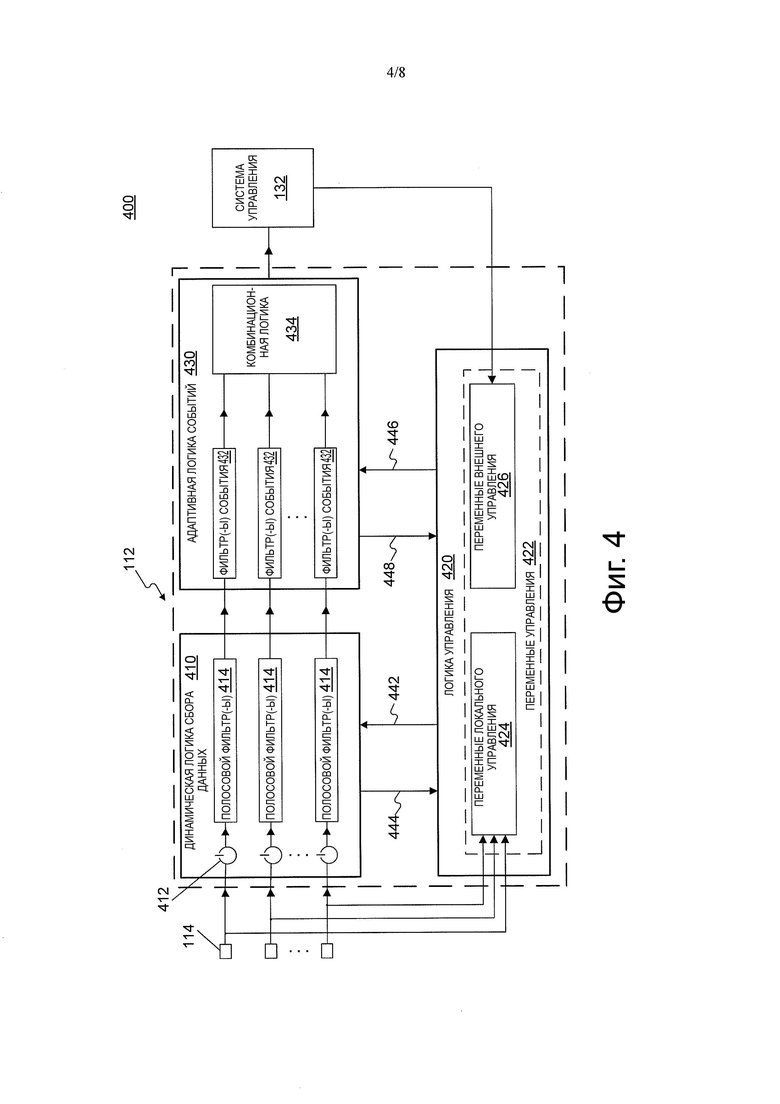
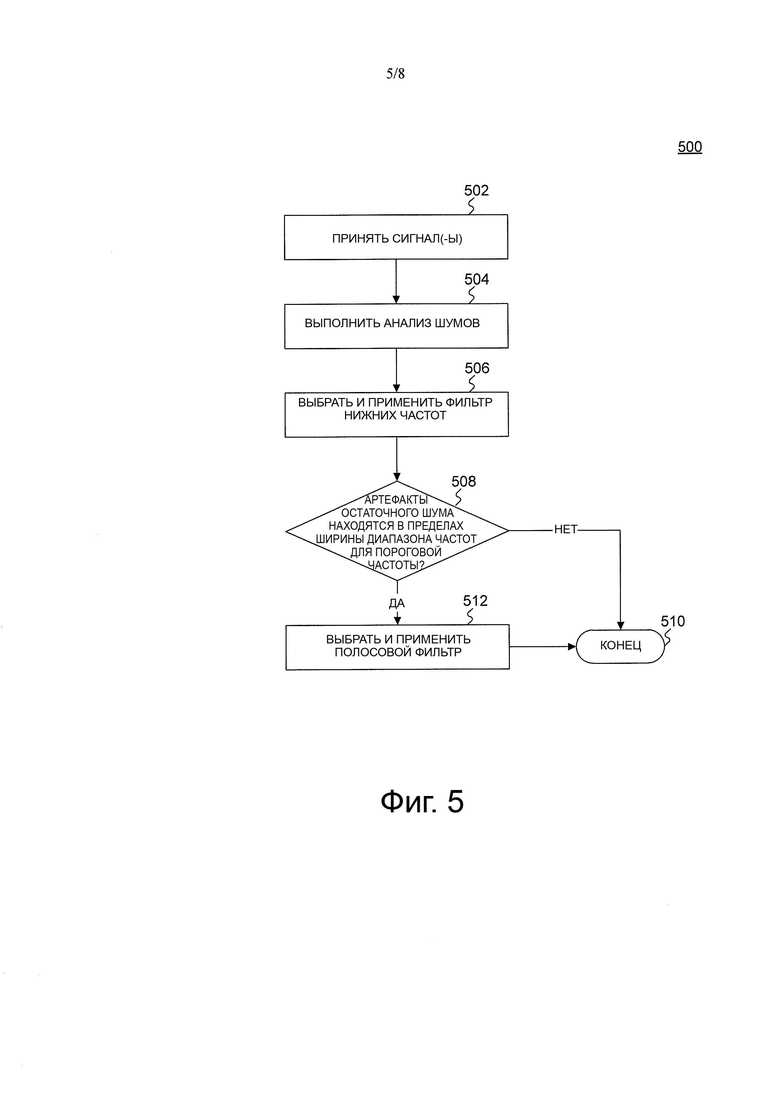
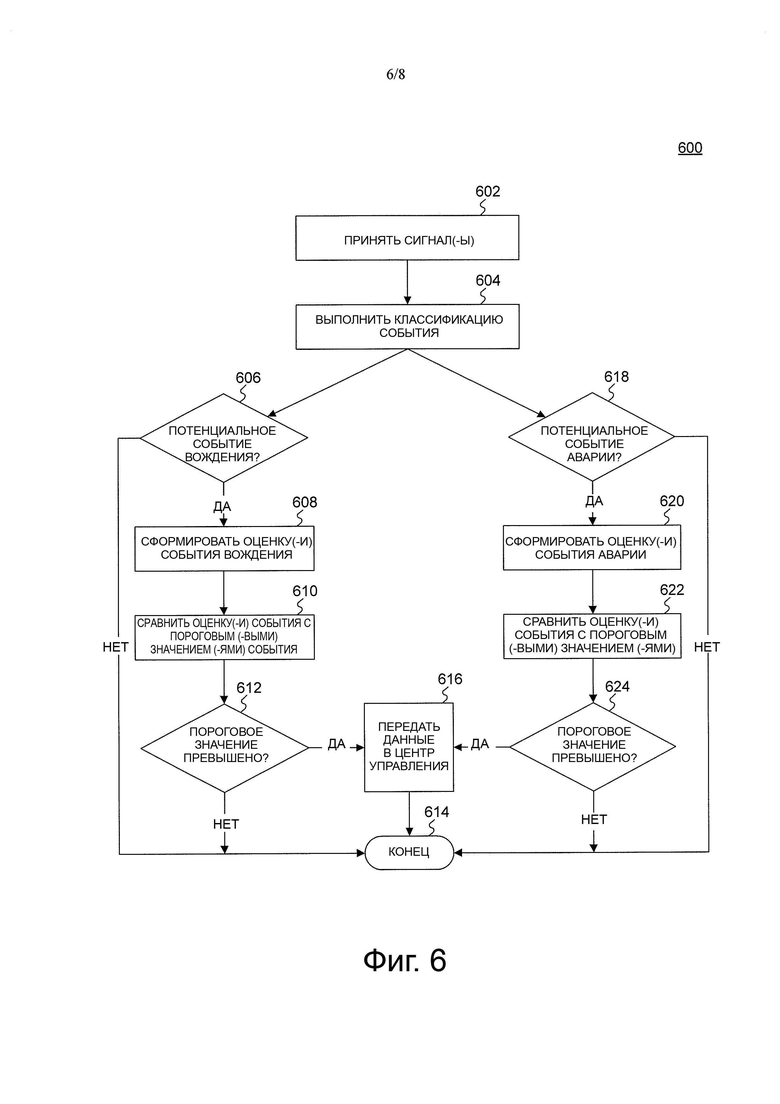

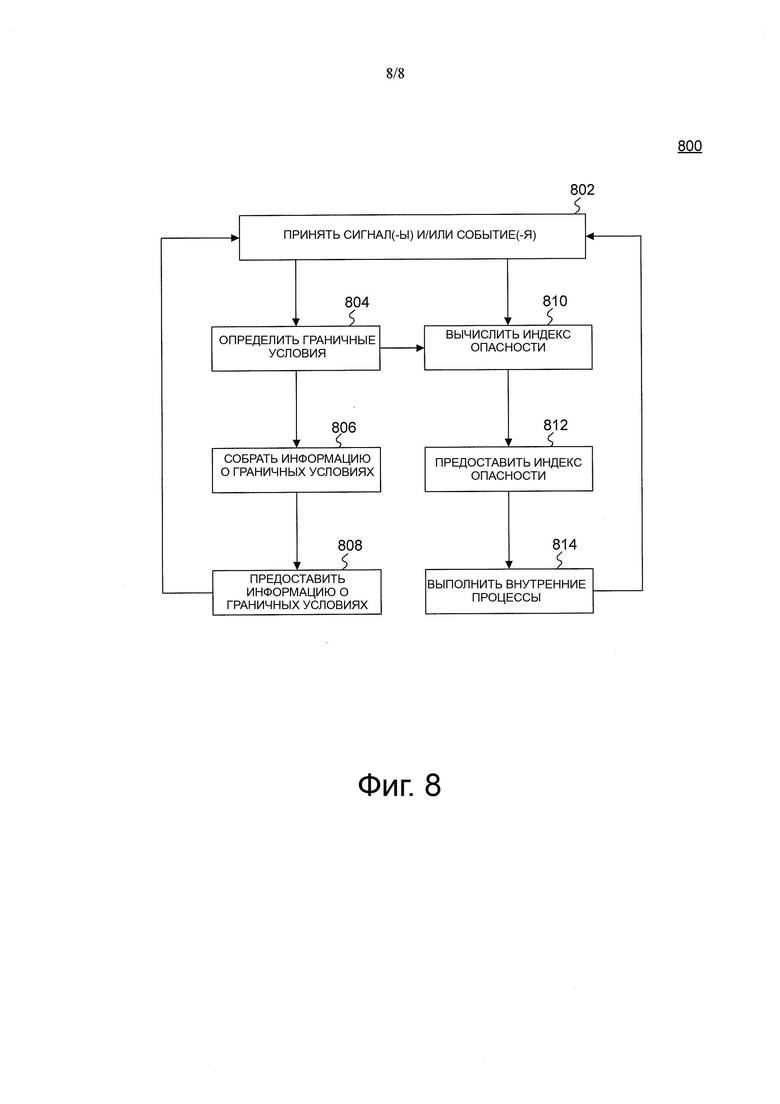
Изобретение относится к системам и способам динамичного управления сбором данных на основе датчиков в транспортных средствах. Технический результат заключается в обеспечении динамического управления сигналами, принятыми от датчиков и их обработкой. Раскрытые варианты осуществления изобретения позволяют принимать сигналы, ассоциированные с датчиками транспортного средства, причем сигналы ассоциированы с частотами выборки, и применять полосовые фильтры к сигналам для создания отфильтрованных сигналов. Раскрытые варианты осуществления могут также обнаруживать возникновение события, сравнивая отфильтрованные сигналы с одним или более порогами события, и передавать данные события системе управления, когда пороги события превышаются. Раскрытые варианты осуществления могут также динамично регулировать сигналы, частоты выборки, полосовые фильтры, сформированную оценку события и пороги события, основываясь на изменениях в наборе переменных управления. Переменные управления могут зависеть от сигналов, связанных с набором датчиков транспортного средства, или от граничных условий и сигналов, связанных с внешней системой. 3 н. и 15 з.п. ф-лы, 8 ил.
1. Система динамичного управления сбором данных на основе датчиков в транспортном средстве, содержащая:
память, хранящую набор команд; и
один или более процессоров, выполненных с возможностью исполнения указанного набора команд, для выполнения одной или более операций, причем операции содержат этапы, на которых:
принимают набор сигналов, ассоциированных с набором датчиков в транспортном средстве, причем набор сигналов ассоциирован с набором частот выборки,
применяют набор полосовых фильтров к набору сигналов для создания набора отфильтрованных сигналов, и
обнаруживают возникновение события, посредством сравнения оценки события, основанной на наборе отфильтрованных сигналов, с пороговым значением события, при этом
по меньшей мере одно из: набора сигналов, набора частот выборки, набора полосовых фильтров, оценки события или пороговое значение события, динамично регулируется, основываясь на изменении в наборе переменных управления, причем
набор переменных управления изменяется в ответ на обнаружение возникновения последовательных событий, где каждое изменение в наборе переменных управления вызывает изменение по меньшей мере в одном из: набора сигналов, набора частот выборки, набора полосовых фильтров, оценки события или порогового значения события;
набор переменных управления содержит:
набор переменных локального управления, основанный на наборе сигналов; и
набор переменных внешнего управления, основанный на индексе опасности, принятом от системы управления, причем пороговое значение события обратно пропорционально индексу опасности,
индекс опасности основан на данных события и наборе граничных условий, отражающих условия, внешние по отношению к транспортному средству, при этом
набор граничных условий содержит по меньшей мере два условия из: условия погоды, условия трафика, условия типа дороги или условия карты средней скорости.
2. Система по п. 1, в которой динамичное регулирование набора сигналов дополнительно содержит исключение выбранного сигнала из набора сигналов или введение нового сигнала, не содержащегося в наборе сигналов.
3. Система по п. 1, в которой этап применения набора полосовых фильтров содержит подэтапы, на которых:
определяют диапазон частот шумов для шумового сигнала в наборе сигналов;
определяют, превышает ли минимальная частота диапазона частот шумов пороговое значение частоты; и
применяют фильтр нижних частот к шумовому сигналу, когда минимальная частота превышает пороговое значение частоты, причем частота среза фильтра нижних частот меньше минимальной частоты.
4. Система по п. 3, в которой этап применения набора полосовых фильтров дополнительно содержит подэтап, на котором применяют полосовой заградительный фильтр к шумовому сигналу, когда ширина диапазона частот шумов меньше пороговой ширины, при этом полосовой заградительный фильтр выполнен с возможностью подавления шумового сигнала в пределах диапазона частот шумов в частотной области.
5. Система по п. 4, в которой определение диапазона частот шумов и ширины диапазона частот шумов вызывает изменение в наборе переменных управления, а этап динамичного регулирования набора полосовых фильтров дополнительно содержит подэтап, на котором применяют к шумовому сигналу фильтр нижних частот или полосовой заградительный фильтр.
6. Система по п. 1, в которой операции дополнительно содержат этап, на котором определяют класс события, ассоциированного с событием, основанным на наборе отфильтрованных сигналов и наборе параметров транспортного средства, отражающем физические характеристики транспортного средства, при этом пороговое значение события основывается на классе события, а набор факторов события основывается на классе события, при этом определение класса события вызывает изменение в наборе переменных управления.
7. Система по п. 6, в которой:
набор сигналов ассоциирован с набором весов сигналов, основываясь на переменных управления;
оценка события дополнительно основывается на наборе весов сигналов; а
этап динамичного регулирования оценки события дополнительно содержит подэтап, на котором осуществляют модификацию набора сигналов или набора весов сигналов.
8. Система по п. 6, в которой:
набор факторов события ассоциирован с набором весов факторов, основанных на переменных управления;
пороговое значение события дополнительно основывается на наборе весов факторов; а
этап динамичного регулирования порога события дополнительно содержит подэтап, на котором осуществляют модификацию класса события, факторов события или весов факторов.
9. Система по п. 1, в которой операции дополнительно содержат этап, на котором выводят данные события, когда оценка события превышает пороговое значение события для события и для каждого из последующих событий.
10. Способ динамичного управления сбором данных, основанным на датчиках в транспортных средствах, содержащий выполняемые с помощью одного или более процессоров, ассоциированных с устройством внутри транспортного средства, этапы, на которых:
принимают набор сигналов, ассоциированных с набором датчиков транспортного средства, где набор сигналов ассоциирован с набором частот выборки;
применяют набор полосовых фильтров к набору сигналов для создания набора отфильтрованных сигналов; и
обнаруживают возникновение события посредством сравнения оценки события, основанной на наборе отфильтрованных сигналов, с пороговым значением события;
динамично регулируют по меньшей мере одно из: набора сигналов, набора частот выборки, набора полосовых фильтров, оценки события или порогового значения события, основываясь на изменении набора переменных управления, причем
набор переменных управления изменяется в ответ на обнаружение возникновения последовательных событий, где каждое изменение в наборе переменных управления вызывает изменение по меньшей мере в одном из: набора сигналов, набора частот выборки, набора полосовых фильтров, оценки события или порогового значения события;
набор переменных управления содержит:
набор переменных локального управления, основанный на наборе сигналов; и
набор переменных внешнего управления, основанный на индексе опасности, принятом от системы управления, причем пороговое значение события обратно пропорционально индексу опасности,
индекс опасности основан на данных события и наборе граничных условий, отражающих условия, внешние по отношению к транспортному средству, при этом
набор граничных условий содержит по меньшей мере два условия из: условия погоды, условия трафика, условия типа дороги или условия карты средней скорости.
11. Способ по п. 10, в котором этап применения набора полосовых фильтров дополнительно содержит подэтапы, на которых:
определяют диапазон частот шумов для шумового сигнала в наборе сигналов;
определяют, превышает ли минимальная частота диапазона частот шумов пороговое значение частоты; и
применяют фильтр нижних частот к шумовому сигналу, когда минимальная частота превышает пороговое значение частоты, причем фильтр нижних частот имеет частоту среза, меньшую, чем минимальная частота.
12. Способ по п. 11, в котором этап применения набора полосовых фильтров дополнительно содержит подэтап, на котором применяют полосовой заградительный фильтр к шумовому сигналу, когда ширина диапазона частот шумов меньше порогового значения ширины, причем полосовой заградительный фильтр выполнен с возможностью подавления шумового сигнала в пределах диапазона частот шумов в частотной области.
13. Способ по п. 12, в котором этап определения диапазона частот шумов и ширины диапазона частот шумов вызывает изменение в наборе переменных управления, а этап динамичного регулирования набора полосовых фильтров дополнительно содержит подэтап, на котором применяют к шумовому сигналу фильтр нижних частот или заградительный полосовой фильтр.
14. Способ по п. 10, дополнительно содержащий этап, на котором определяют класс события, ассоциированный с событием, основанным на наборе отфильтрованных сигналов и наборе параметров транспортного средства, отражающем физические характеристики транспортного средства, причем пороговое значение события основано на классе события и на наборе факторов события, основанных на классе события, при этом определение класса события вызывает изменение в наборе переменных управления.
15. Способ по п. 14, в котором:
набор сигналов ассоциирован с набором весов сигналов, основываясь на переменных управления;
оценка события дополнительно основывается на наборе весов сигналов; а
этап динамичного регулирования оценки события дополнительно содержит подэтап, на котором модифицируют набор сигналов и набор весов сигналов.
16. Способ по п. 14, в котором:
набор факторов события ассоциирован с набором весов факторов, основываясь на переменных управления;
пороговое значение события дополнительно основано на наборе весов факторов; а
этап динамичного регулирования порогового значения события дополнительно содержит подэтап, на котором модифицируют класс события, факторы события или веса факторов.
17. Способ по п. 10, дополнительно содержащий этап, на котором выводят данные события, когда оценка события превышает пороговое значение события для события и для каждого из последующих событий.
18. Физический, энергонезависимый считываемый компьютером носитель, хранящий команды, вызывающие, при исполнении по меньшей мере одним процессором, выполнение указанным по меньшей мере одним процессором способа динамичного управления сбором данных, основанным на датчиках, установленных в транспортных средствах, содержащего этапы, на которых:
принимают набор сигналов, ассоциированных с набором датчиков транспортного средства, причем набор сигналов ассоциирован с набором частот выборки,
применяют набор полосовых фильтров к набору сигналов для создания набора отфильтрованных сигналов, и
обнаруживают возникновение события, посредством сравнения оценки события, основанной на наборе отфильтрованных сигналов, с пороговым значением события,
динамично регулируют по меньшей мере одно из: набора сигналов, набора частот выборки, набора полосовых фильтров, оценки события или порогового значения события, основываясь на изменении в наборе переменных управления, причем
набор переменных управления изменяется в ответ на обнаружение возникновения последовательных событий, где каждое изменение в наборе переменных управления вызывает изменение по меньшей мере в одном из: набора сигналов, набора частот выборки, набора полосовых фильтров, оценки события или порогового значения события;
набор переменных управления содержит:
набор переменных локального управления, основанный на наборе сигналов; и
набор переменных внешнего управления, основанный на индексе опасности, принятом от системы управления, причем пороговое значение события обратно пропорционально индексу опасности,
индекс опасности основан на данных события и наборе граничных условий, отражающих условия, внешние по отношению к транспортному средству, при этом
набор граничных условий содержит по меньшей мере два условия из: условия погоды, условия трафика, условия типа дороги или условия карты средней скорости.
| US 5904368 A1, 18.05.1999 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| CN 104593671 A, 08.04.2015 | |||
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2022 |
|
RU2821977C2 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| CN 104063604 A, 24.09.2014 | |||
| CN 105116817A, 02.12.2015 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| ОПРЕДЕЛЕНИЕ ТЕМПЕРАТУРЫ ПОДШИПНИКОВ КОЛЕС ПОЕЗДОВ | 2005 |
|
RU2393441C2 |

