Настоящее техническое решение относится к медицинской физике, а именно к приемному датчику магнитно-резонансного томографа (МРТ) для приема и сбора сигнала ядерного магнитного резонанса. Датчик является одним из основных элементов МРТ и во многом определяет его чувствительность и, следовательно, качество диагностического изображения. Предложенное решение может быть использовано для получения магнитно-резонансного изображения кисти руки пациента в специализированном малогабаритном травматологическом томографе.
Данный тип томографа отличается от крупногабаритных «на все тело человека» размерами своего магнита. Соответственно это накладывает определенные требования на приемо-передающую систему. Одна из конструктивных особенностей специализированного малогабаритного травматологического томографа заключаются в том, что область, в которой располагается приемно-передающая система, мала и составляет 210 мм вдоль оси Z (направления основного магнитного поля).
Для исследования объектов различных размеров создаются несколько сменных узкопрофильных приемных датчиков.
В крупногабаритных томографах расстояние между передающим контуром и приемным датчиком составляет порядка 300-500 мм. В малогабаритных томографах приемный датчик и передающий контур расположены на соосных цилиндрических каркасах, расположенных на расстоянии порядка 5 мм. То есть в малогабаритных томографах каждая сменная узкопрофильная приемно-передающая система, если она выполнена с разделением передающего и приемного контуров, обязательно будет включать в себя приемный датчик и передающий контур. В таких системах передающий контур располагается ближе к магниту и дальше от «области интересов», а приемный датчик располагается внутри передающего контура, ближе к «области интересов». Учитывая вышеперечисленные особенности томографа, следует, что конструкция данного типа приемно-передающей системы накладывает некоторые ограничения, которые стоит учитывать при расчетах и непосредственной разработке таких систем. Данный тип конструктивной особенности может приводить к взаимным влияниям контуров, что также следует учитывать.
Важной характеристикой приемного датчика является однородность радиочастотного поля, влияющая на корректное отображение структуры объекта в получаемых изображениях. Желательно, чтобы неоднородность радиочастотного поля составляла менее 10%. Однородность поля связана с конфигурацией витков катушек.
Известен специализированный приемный датчик для формирования изображения магнитно-резонансной томографии предплечья [US5185577 А, 09.02.1993]. Датчик содержит обмотку в форме седла, которая намотана вокруг полого корпуса. Корпус имеет сужающийся концевой участок. Диаметр корпуса датчика увеличивается по направлению к руке пациента в соответствии с исследуемой областью, так, чтобы спиральный элемент мог располагаться ближе к предплечью пациента. Недостатком данного решения является то, что катушка в форме седла не позволяет добиться высокой однородности в большом объеме, в отличие от соленоидальной.
Описан датчик с конформной соленоидальной катушкой с параллельной намоткой [US5543710 А, 06.08.1996]. Форма катушки приближена к исследуемой области: рука, запястье и нога. Недостатком данного решения является то, что равномерно распределенные проводники не могут создать однородное радиочастотное поле в большом объеме. Из-за этого при диагностике на магнитно-резонансном томографе может потребоваться многократное перемещение катушки. Неоднородное поле, кроме того, искажает изображение, вследствие чего ухудшается достоверность диагностики.
Из [RU2192165 С1, 10.11.2002] известен датчик с приемной радиочастотной катушкой, предназначенный для магнитно-резонансной томографии голеностопа. Увеличение отношения сигнал/шум достигается приближением витков датчика к объекту исследования. Данное решение направлено на диагностику конкретных анатомических областей (голеностоп) и оказывается неприемлемым для диагностики других частей тела человека: кисть, локоть, колено.
Наиболее близким техническим решением к заявляемому, выбранному заявителем в качестве прототипа, является описанный в статье [Баязитов А.А., Фаттахов Я.В., Хундиряков В.Е. / Разработка приемного датчика эллиптической формы для специализированного магнитно-резонансного томографа с полем 0.4 Тесла // Научное приборостроение. 2019. Том 29, №1, С. 92-98. DOI: 10.18358/np-29-1-i9298] приемный датчик для малогабаритного травматологического томографа с напряженностью поля 0.4 Тл на постоянном магните. В статье представлены результаты математического моделирования объемного распределения магнитного поля приемного датчика в зависимости от его конструктивных особенностей. Проведенный сравнительный анализ результатов показал преимущество контура эллиптического сечения с шестью витками по сравнению с контурами с меньшим количеством витков. Были определены оптимальные параметры витков. Описанный в указанном источнике приемный радиочастотный датчик для магнитно-резонансной томографии кисти руки, показавший наилучшие характеристики, включает приемную радиочастотную катушку, содержащую обмотку из шести витков, разделенных неравномерными промежутками, расположенных и электрически соединенных параллельно один другому и размещенных на пустотелом каркасе, имеющем эллиптическое поперечное сечение с размером полуосей 80 и 60 мм. Витки выполнены из медной ленты шириной 10 мм. Витки ориентированы ортогонально относительно продольной оси каркаса. Два средних витка из шести расположены на расстоянии 40 мм друг от друга, промежуток от каждого среднего до следующего витка составляет 60 мм, внешние (крайние) витки расположены тоже на расстоянии 60 мм от средних витков, т.е. витки по краям каркаса находятся друг над другом. Расстояния указаны по осям проводников витков. Длина датчика - 170 мм. Недостатком прототипа является достаточно малая рабочая область - вдоль оси X: 176 мм, вдоль оси Y: 100 мм, вдоль оси Z: 60 мм.
При возникновении необходимости исследовать более крупные объекты (например, размер кисти руки взрослого человека до 210 мм), в том числе для получения изображения смежных областей, в таких случаях для более достоверной диагностики нужно иметь датчик с размерами рабочей области большими, чем указано в прототипе.
Технической проблемой, решаемой созданием заявляемого изобретения, является значительное расширение зоны однородности принимаемого сигнала для специализированного малогабаритного магнитно-резонансного томографа с полем 0.4 Тесла при минимальном увеличении размера датчика.
Задачей заявляемого технического решения является создание приемного радиочастотного датчика для устройства формирования изображения ядерного магнитного резонанса с улучшенной однородностью поля во всем объеме датчика, что позволит получить магнитно-резонансное изображение с высоким разрешением кисти руки без необходимости перемещения радиочастотного датчика.
Технический результат состоит в оптимизации количества и взаиморасположения проводников, что приводит к расширению зоны однородности принимаемого сигнала до 15%. Кроме того, техническим результатом является расширение арсенала приемных устройств для формирования изображения ядерного магнитного резонанса.
Задача решается, и указанный технический результат достигается заявляемым приемным радиочастотным датчиком для магнитно-резонансной томографии кисти руки, в котором на пустотелом каркасе, имеющем овальное поперечное сечение, причем размеры полуосей овала находятся в соотношении 2:1,5, закреплены электрически соединенные параллельно один другому и имеющие электрическое соединение проводников с оборудованием МРТ, ориентированные ортогонально относительно продольной оси каркаса витки, расположенные неравномерно, расстояние между которыми оптимизировано расчетным путем, особенностью которого является то, что радиочастотная катушка датчика содержит обмотку из восьми витков, и расстояния между парами витков, симметричными относительно плоскости симметрии датчика, параллельной виткам, считая от центральных к крайним, находятся в соотношении: 1:2,75:5:5.
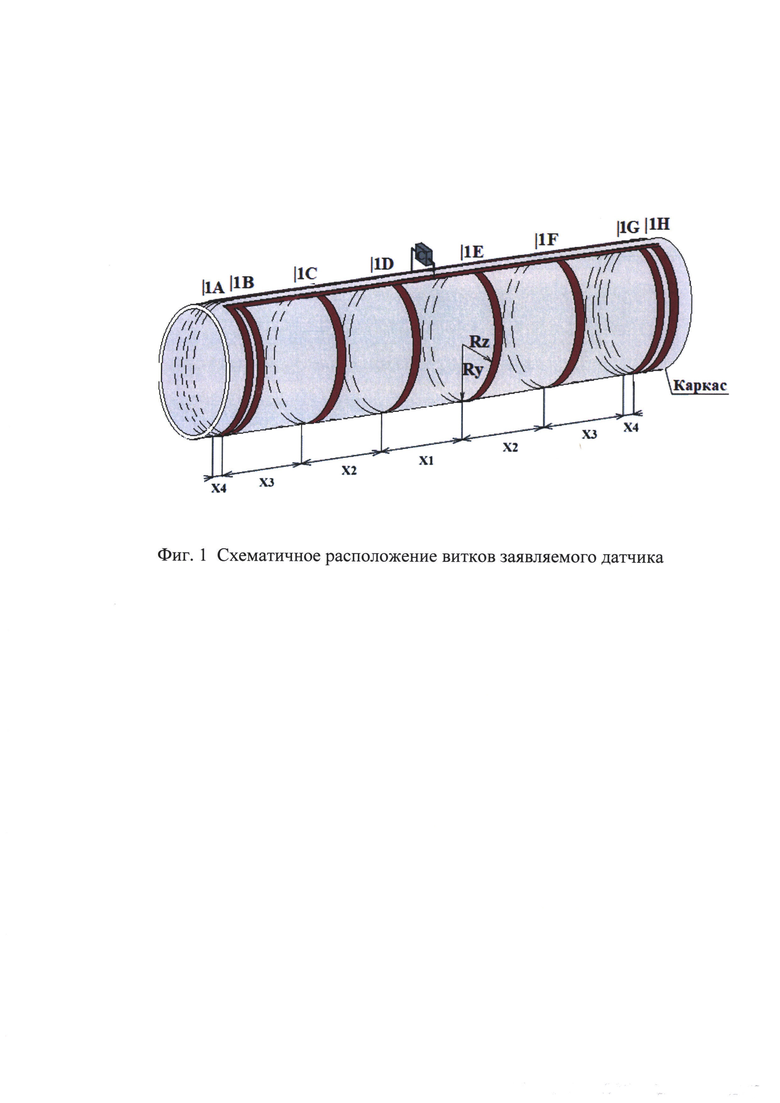
На фиг. 1 представлено схематичное расположение витков заявляемого датчика. Витки намотаны на пустотелом каркасе овального сечения.
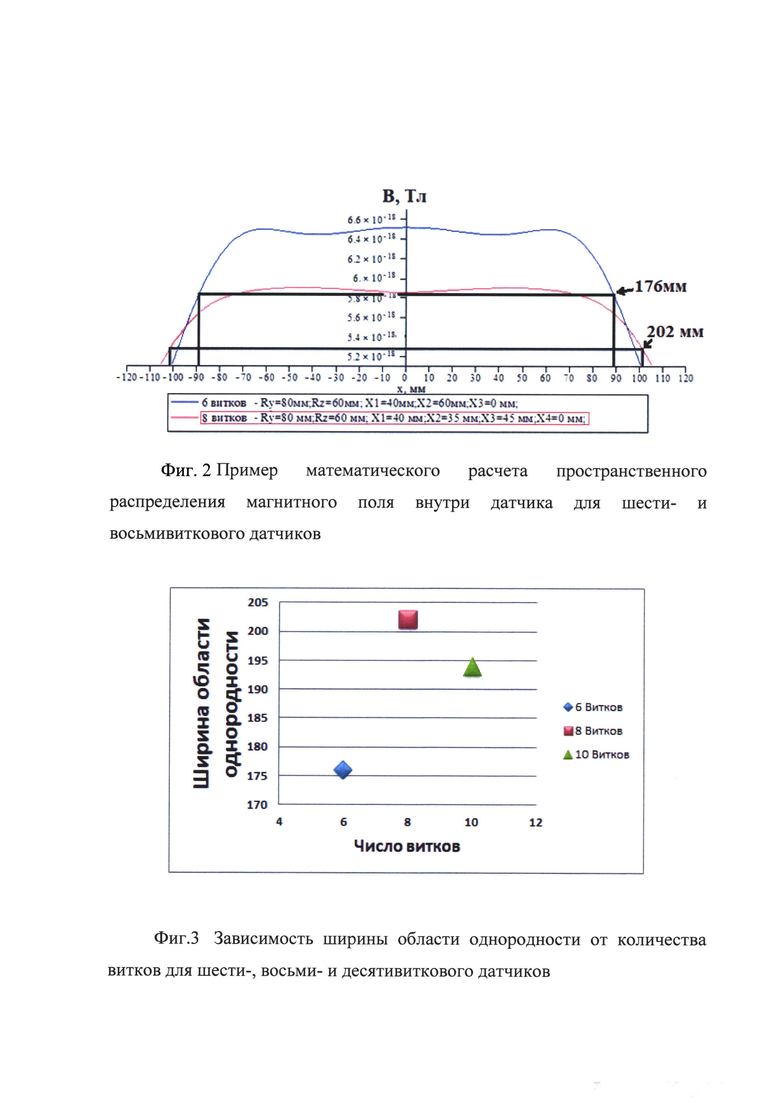
На фиг. 2 представлен пример математического расчета пространственного распределения магнитного поля внутри датчика для шести- и восьмивиткового датчиков.
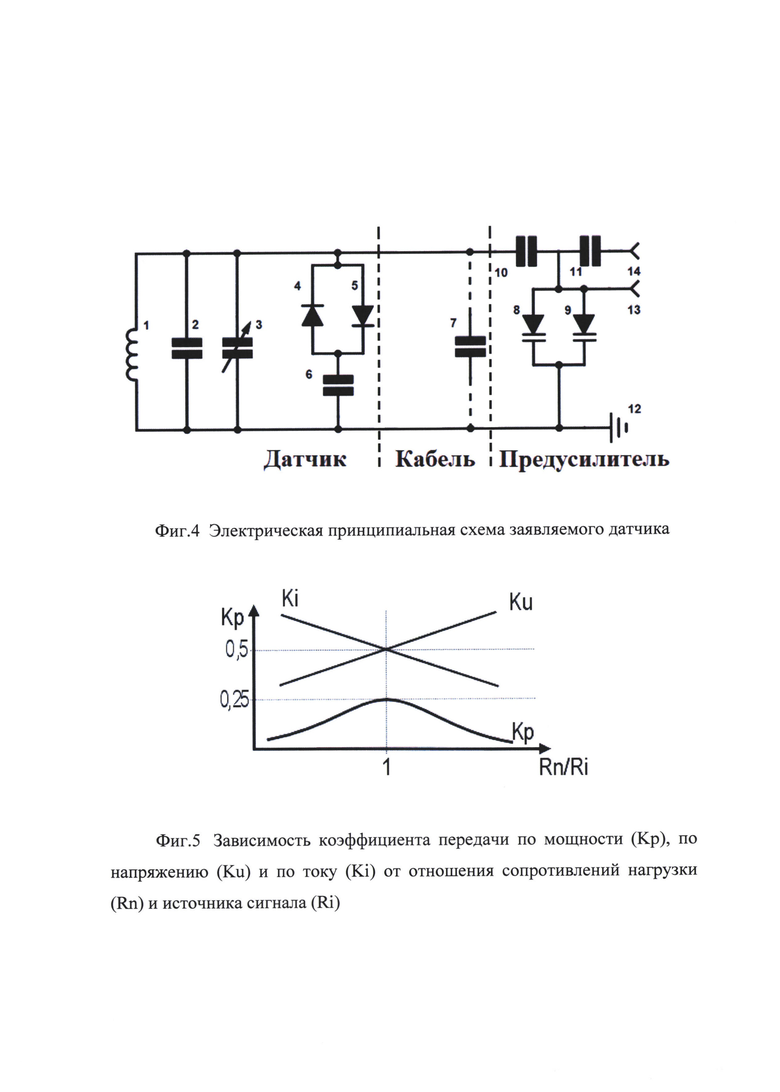
На фиг. 3 представлена зависимость ширины области однородности от количества витков для шести-, восьми- и десятивиткового датчиков.
На фиг. 4 представлена принципиальная электрическая схема датчика.
На фиг. 5 представлена зависимость коэффициента передачи по мощности (Kp), по напряжению (Ku) и по току (Ki) от отношения сопротивлений нагрузки (Rn) и источника сигнала (Ri).
Приемный радиочастотный датчик для магнитно-резонансной томографии кисти руки (фиг. 1) содержит: пустотелый каркас, изготовленный из диэлектрического материала (например, из полистирола) в форме цилиндра с овальным поперечным сечением, причем полуоси овала находятся в соотношении 2:1,5 - в примере конкретной реализации изобретения размеры осей составляют 160 и 120 мм. На каркасе параллельно друг другу закреплены восемь одинаковых витков, обозначенных на фигуре 1, как 1А-1Н, соответственно. Витки 1А-1Н выполнены из ленты из высококачественной меди шириной 10 мм. Толщина медной ленты для витков и проводников выбирается из соображения величины скин-слоя на рабочей частоте и составляет 0.1 мм, т.к. величина скин-слоя на частоте 17.5 МГц около 17 мкм. Необходимо выбирать толщину материала не менее двух величин скин-слоя, учитывая, что ток протекает по проводнику со всех сторон.
Витки 1А-1Н электрически соединены параллельно, ориентированы ортогонально относительно продольной оси каркаса, расположены на каркасе неравномерно и таким образом, чтобы обеспечивалась высокая однородность поля в большем объеме и, соответственно, однородность получаемого магнитно-резонансного изображения, что достигается при расположении витков датчика таким образом, чтобы расстояния между симметричными относительно центра датчика парами витков, считая от центральных к крайним, находятся в соотношении 1:2,75:5:5. Так, расстояние между наиболее близкими к центру датчика витками 1D и 1Е=X1, между следующими витками 1С и 1F=Х1+Х2+Х2, между 1В и 1G=Х1+Х2+Х2+Х3+Х3, между 1А и 1Н=Х1+Х2+Х2+Х3+Х3+Х4+Х4, и отношение расстояния между симметричными относительно центра датчика парами витков к расстоянию между наиболее близкими к центру датчика витками составляет X1 : Х1+Х2+Х2 : Х1+Х2+Х2+Х3+Х3 : Х1+Х2+Х2+Х3+Х3+Х4+Х4=1:2,75:5:5.
Изменение заявленного соотношения приводит к уменьшению зоны однородности магнитного поля.
Под центром датчика понимается плоскость симметрии датчика, параллельная плоскости витков. Под расстоянием между парами витков понимается расстояние между центрами витков, имеющими ширину (в примере конкретной реализации изобретения - 10 мм).
Расчет магнитного поля каждой конфигурации расположения витков произведен расчетным путем с высокой точностью по закону Био-Савара-Лаласа с применением оригинальной программы для ЭВМ для расчета распределения магнитных полей в контуре [Программа для расчета и оптимизации магнитного поля высокой однородности от контура с током произвольной формы / Баязитов А.А., Фаттахов Я.В., Хабипов P.Ш., Фахрутдинов А.Р., Шагалов В.А., Чумаров П.И. // Свидетельство о государственной регистрации программы для ЭВМ, №2019618088,26.06.2019].
Оптимальное расположение витков в датчике определено также с использованием указанной программы перебором значений расстояний между витками (X1, Х2, Х3, Х4) с шагом 5 мм, учитывая критерии отбора: габариты датчика не выходят за 210 мм и область однородности выбирается на уровне минус 10% от максимальной амплитуды. Исходное расположение витков выбрано согласно прототипу. Окончательный выбор оптимального варианта произведен экспертным образом по критерию отсутствия немонотонной зависимости величины магнитного поля.
Для реализации заявляемого технического решения собран датчик овального сечения с восьмью витками, включенными параллельно, со следующими параметрами: полуоси овального сечения витков Ry=80 мм, Rz=60 мм, расстояния между витками следующие:
1А-1В и 1G-1H-X4=0;
1B-1C и 1F-1G-X3=45 мм;
1C-1D и 1E-1F-X2=35 мм;
1D-1E-X1=40 мм.
Расстояние между центрами крайних витков датчика 200 мм.
Габаритный размер датчика 210 мм.
На фигуре 2 представлено сравнение математически рассчитанных с помощью вышеуказанной программы объемных распределений магнитного поля внутри датчиков по прототипу (с шестью витками) - верхняя кривая, по заявляемому решению (с восемью определенным образом расположенными витками, оптимальное расположение которых определено при помощи указанной программы) - нижняя кривая. Прямоугольными рамками обозначены области однородности, т.е. области, в которых амплитуда поля уменьшается не более чем на 10%. Видно, что для заявляемого датчика, имеющего восемь витков, границы этой зоны (202 мм) шире примерно на 15% по сравнению с датчиком по прототипу (176 мм).
Заявляемое количество и взаиморасположение витков в катушке датчика является оптимальным для обеспечения высокой однородности поля и, соответственно, однородности магнитно-резонансного изображения, при сохранении параметра добротности. Как показано на фигуре 2, заявляемый датчик с восемью витками имеет преимущество в ширине области однородности по сравнению с датчиком с шестью витками, описанным в прототипе.
При дальнейшем увеличении числа витков, например, до десяти, и при соблюдении критерия отбора (ограничения габарита датчика в 210 мм), область однородности по результатам расчетов оказывается меньше, чем для восьми витков.
Увеличение области однородного приема сигнала для десятивиткового датчика возможно только при увеличении размеров самого датчика, например, вдоль плоскостей полюсов магнита, и, следовательно, при уменьшении коэффициента заполнения датчика и, как следствие, уменьшении отношения сигнал/шум.
На фигуре 3 показана зависимость ширины области однородности (в мм) от количества витков для датчиков с шестью, восемью и десяти оптимизировано расположенными витками. Общие (габаритные) размеры датчиков составляют: 170 мм для 6-ти виткового и 210 мм - для 8-ми и 10-ти витковых. Под общим размером подразумевается расстояние между крайними (наиболее удаленными от цента датчика) витками датчика с учетом ширины ленты (габаритный размер). Можно видеть, что максимальное значение ширины области однородности - 202 мм наблюдается при использовании датчика с восемью витками, в то время как для датчика с шестью проводниками это значение составляет 176 мм, а для датчика с десятью проводниками - 194 мм.
Таким образом, оптимальным по величине области однородности поля является заявляемый восьмивитковый датчик, область однородности которого не выходит за границы области однородности основного магнитного поля.
На фигуре 4 приведена принципиальная электрическая схема заявляемого датчика.
Витки 1А-1Н контура датчика соединены параллельно между собой. Кроме витков в контур входят все конденсаторы, указанные на схеме датчика, включая емкость кабеля и варикапов. Конденсатор 2 является основным (определяющем основную резонансную частоту томографа) конденсатором контура. Переменный конденсатор 3 необходим для предварительной настройки датчика на рабочую частоту. В контур приемного датчика через встречно-параллельные диоды 4 и 5 включена дополнительная емкость 6 для защиты приемного контура датчика от накопления энергии во время режима передачи за счет изменения резонансной частоты контура. Кабель, соединяющий приемный датчик с подстроечным блоком и последующей аппаратурой МРТ, своей распределенной емкостью 7 также входит в приемный контур. Подстроечный блок состоит из варикапов 8 и 9, включенных параллельно кабелю через конденсатор 10, и расположен вне датчика в отдельном корпусе. Конденсатор 10 служит для уменьшения влияния низкодобротной емкости варикапов 8 и 9 на приемный контур с целью уменьшения падения добротности. Емкость конденсатора 10 подбирается таким образом, чтобы было возможно подстраивать резонансную частоту при помещении исследуемого объекта - кисти руки - внутрь датчика, а влияние варикапов 8 и 9 на добротность контура датчика было минимально. Конденсатор 11 необходим для исключения связи по постоянному току между цепью управления варикапами 13 и входной цепью приемной аппаратуры томографа 14. Катоды варикапов 8 и 9 соединяются с землей 12. Через входную цепь 13 поступает напряжение управления емкостью варикапов. Через входную цепь приемной аппаратуры томографа 14 передается сигнал ядерного магнитного резонанса в последующую аппаратуру МРТ.
Заявляемый приемный датчик работает следующим образом.
Обследуемый пациент располагает кисть внутри датчика. Датчик располагается в томографе между полюсами постоянного магнита. С помощью подстроечного блока, состоящего из варикапов 8 и 9, производится настройка резонансного контура на рабочую частоту до начала проведения съемки исследуемого объекта. Для этого через цепь 13 подается сигнал управления на варикапы 8 и 9. Для настройки резонансного контура на рабочую частоту оператор перестраивает емкость варикапов 8, 9 за счет изменения постоянного напряжения на них. Во время режима передачи радиочастотный импульс на резонансной частоте возбуждает спиновую систему исследуемого объекта и одновременно наводит э.д.с. на приемный датчик, за счет индуктивной связи между приемным и передающим контурами. Для уменьшения прямого сигнала от передающего контура в приемном датчике установлены встречно-параллельные диоды 4 и 5 с последовательно включенной дополнительной емкостью 6. Наведенный сигнал в катушке 1 приемного датчика достигает уровня, при котором встречно-параллельные диоды 4 и 5 открываются и подключают дополнительную емкость 6 параллельно приемному контуру. За счет этого приемный контур отстраивается от резонансной частоты, тем самым уменьшая влияние передающего контура на приемный. Таким образом, достигается развязка между приемной и предающей системой. Во время приема сигнала ЯМР, передающий радиочастотный импульс отсутствует, датчик начинает принимать слабый сигнал от объекта исследования. Величина данного сигнала меньше порога открытия диодов 4 и 5, поэтому в этом режиме дополнительная емкость 6 не включена в основной контур, и датчик принимает сигнал на рабочей частоте. Через входную цепь приемной аппаратуры томографа 14 сигнал ядерного магнитного резонанса передается в последующую аппаратуру МРТ.
Кроме того в заявляемом датчике применено согласование по напряжению, а не по мощности, т.к. используется отдельно передающий и приемный контур.
При работе в однокатушечном режиме единственная катушка выступает в качестве передающего контура и приемного датчика. В этом случае необходимо иметь согласованный по мощности датчик для того, чтобы энергия передающего импульса максимально передавалась в передающий контур. При оптимальном согласовании по мощности Kp~0.25, Ku~0.5 (фиг. 5).
При разделении датчика на передающий и приемный контуры имеет смысл для приемной части применить так называемое анэнергетическое согласование, при котором сводится к минимуму передача энергии или мощности между объектом измерения, т.е. приемным контуром, и измерительной системой (предусилителем).
Согласование по напряжению заключается в получении максимального коэффициента передачи напряжения в нагрузку. Это имеет место при выполнении условия RH>>Rсиг. При этом Ku → 1. Нагрузкой для источника сигнала (приемного контура с Rсиг ~ кОм) является входной каскад предусилителя на полевом транзисторе с Rвx(Rн) ~ Мом.
Для реализации условия согласования по напряжению приемный контур подключается непосредственно к входным цепям предусилителя за счет разделения резонансной емкости на две части: часть емкости находится непосредственно в датчике, другая часть в корпусе предусилителя. Емкость кабеля соединения также входит в емкость контура.
Даже когда используется однокатушечный режим, часто отходят от оптимального согласования по мощности в пользу улучшения отношения сигнал/шум в режиме приема [Г.В. Мозжухин, Г.С.Куприянова, Д.В. Шибалкин, В.В. Федотов. Оптимизация приемо-передающей системы ЯКР-детекторов азотсодержащих соединений // Вестник РГУ им. И. Канта. 2007. Вып. 3. Физико-математические науки. С. 46-54].
Кроме повышения коэффициента передачи по напряжению, такое решение позволяет применить дистанционную настройку приемного контура на резонанс с помощью варикапов, что облегчает процесс настройки и делает его более быстрым и точным.
Также такой способ размещения настроечного блока позволяет не заводить провода управления и сами элементы, которые могут быть ферромагнитными, непосредственно в датчик и избегать, таким образом, внесения возможных электромагнитных помех и искажений магнитного поля.
Таким образом, заявлен новый, расширяющий арсенал известных, приемный радиочастотный датчик для устройства формирования изображения ядерного магнитного резонанса с улучшенной однородностью поля во всем объеме датчика, что позволит получить магнитно-резонансное изображение кисти руки с высоким разрешением без необходимости перемещения радиочастотного датчика, поскольку МРТ-исследования с перестановкой датчика по исследуемому органу (как вынужденная мера при малой области однородности датчика) затрудняют последующую геометрическую привязку исследованной области к анатомическому объекту и не позволяют получить, таким образом, полноценную и объективную диагностическую картину. Также в предложенном приемном радиочастотном датчике, который может быть использован в специализированном малогабаритном травматологическом томографе, реализовано сохранение высокого соотношения сигнал/шум.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ увеличения однородности радиочастотного поля датчика среднеполевого магнитно-резонансного томографа и катушка для его осуществления | 2022 |
|
RU2795364C1 |
| Магнитно-резонансный томограф с метаповерхностью (варианты) | 2021 |
|
RU2776338C1 |
| СИСТЕМА ОДНОВРЕМЕННОГО КОНТРОЛЯ И ОЦЕНКИ ДИНАМИКИ ФИЗИОЛОГИЧЕСКИХ ПРОЦЕССОВ В УСЛОВИЯХ ПРОВЕДЕНИЯ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ ЧЕЛОВЕКА | 2021 |
|
RU2756566C1 |
| МАГНИТНО-РЕЗОНАНСНЫЙ ТОМОГРАФ (МРТ) | 2015 |
|
RU2619430C2 |
| Способ функционирования магнитно-резонансного томографа на основе метаповерхности (варианты) | 2021 |
|
RU2776600C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ ПРОВОДНИКОВ КАТУШКИ, ИСПОЛЬЗУЕМОЙ В МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ (МРТ) | 2023 |
|
RU2821393C1 |
| СПОСОБ НЕИНВАЗИВНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ ПО ИХ СПЕКТРАМ ЯМР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2691659C1 |
| ПРИЕМНАЯ РАДИОЧАСТОТНАЯ КАТУШКА ДЛЯ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ ГОЛЕНОСТОПА | 2000 |
|
RU2192165C1 |
| Способ проведения магнитно-резонансной томографии кисти | 2023 |
|
RU2827908C1 |
| Способ выявления инвазии перивезикальной клетчатки при раке мочевого пузыря с использованием динамической магнитно-резонансной цистографии | 2017 |
|
RU2688310C1 |
Изобретение относится к медицинской физике, а именно к приемному датчику магнитно-резонансного томографа (МРТ) для приема и сбора сигнала ядерного магнитного резонанса, и может быть использовано для получения магнитно-резонансного изображения кисти руки пациента в специализированном малогабаритном травматологическом томографе. Приемный радиочастотный датчик для магнитно-резонансной томографии кисти руки включает приемную радиочастотную катушку, содержащую обмотку из электрически соединенных параллельно один другому витков, имеющих электрическое соединение проводников с оборудованием МРТ и размещенных на пустотелом каркасе овального поперечного сечения, размеры полуосей которого находятся в соотношении 2:1,5. Причем витки ориентированы ортогонально относительно продольной оси каркаса, расположены неравномерно, и расстояние между витками оптимизировано расчетным путем. Радиочастотная катушка датчика содержит обмотку из восьми витков, и расстояния между парами витков, симметричными относительно плоскости симметрии датчика, параллельной виткам, считая от центральных к крайним, находятся в соотношении: 1:2,75:5:5. Применение данного изобретения позволяет получить магнитно-резонансные изображения с высоким разрешением для конкретных областей, представляющих интерес, без необходимости перемещения радиочастотного датчика. 5 ил.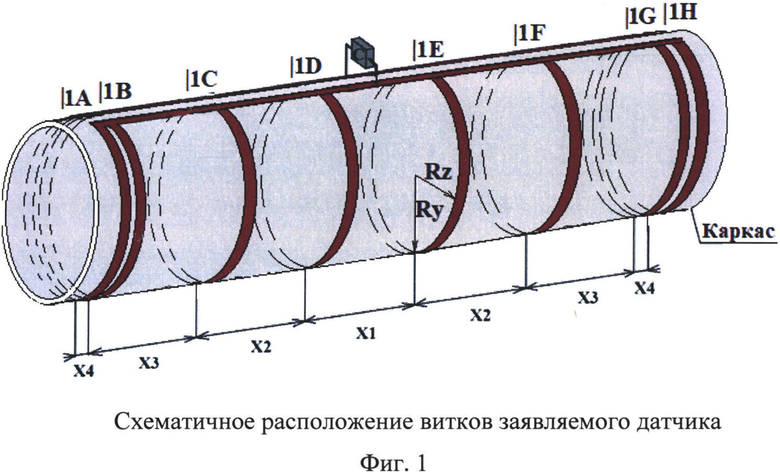
Приемный радиочастотный датчик для магнитно-резонансной томографии кисти руки, включающий приемную радиочастотную катушку, содержащую обмотку из электрически соединенных параллельно один другому витков, имеющих электрическое соединение проводников с оборудованием МРТ и размещенных на пустотелом каркасе овального поперечного сечения, размеры полуосей которого находятся в соотношении 2:1,5, причем витки ориентированы ортогонально относительно продольной оси каркаса, расположены неравномерно, и расстояние между витками оптимизировано расчетным путем, отличающийся тем, что радиочастотная катушка датчика содержит обмотку из восьми витков, и расстояния между парами витков, симметричными относительно плоскости симметрии датчика, параллельной виткам, считая от центральных к крайним, находятся в соотношении: 1:2,75:5:5.
| Баязитов А.А., Фаттахов Я.В., Хундиряков В.Е | |||
| / Разработка приемного датчика эллиптической формы для специализированного магнитно-резонансного томографа с полем 0.4 Тесла // Научное приборостроение | |||
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Солесос | 1922 |
|
SU29A1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОГО МОДЕЛИРОВАНИЯ ДВУХМЕРНЫХ ФИЗИЧЕСКИХ ПОЛЕЙ | 0 |
|
SU195653A1 |
| КОНДЕНСАТОР ПОСТОЯННОЙ ЕМКОСТИ | 0 |
|
SU192958A1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОГО СКЛЕИВАНИЯ НА ПРЕССЕ НАГРЕТЫХ ЛИТЕЙНЫХ КОРКОВЫХ ПОЛУФОРМ | 0 |
|
SU188624A1 |
| US 10520563 | |||

