Изобретение относится к области картографии и может быть использовано при создании и актуализации цифровых моделей рельефа с использованием в качестве исходного материала топографических карт.
Известен способ распознавания форм рельефа местности по картине горизонталей (пат. №2308086 РФ, МПК G06T17/50, 10.10.2007), заключающийся в анализе полученных горизонталей, получении значений глубин и высот по совокупности признаков горизонталей анализируемых карт местности, построении триангуляции, связывающей элементы цифровой модели рельефа, по совокупности отредактированных горизонталей таким образом, чтобы никакие части горизонталей не попадали внутрь получающихся треугольников, построении неориентированных графов, нахождении связных компонентов полученного графа и распознавании формы рельефа путем последовательного анализа всех связных компонентов графа.
Недостатками данного способа являются необходимость ручного построения и редактирования горизонталей. Отсутствие автоматизированного решения приводит к значительным временным затратам и повышению требований к квалификации операторов программных комплексов автоматизированной обработки растровых топографических карт. Известен способ получения и актуализации цифрового картографического материала (пат. №2244260 РФ, МПК G01C11/00, 10.01.2005) заключающийся в преобразовании слоев базовой цифровой карты местности путем сканирования и получения копий топографического материала и данных спутниковой навигации, идентификации дискретных, линейных и площадных объектов местности по имеющемуся изображению и полученным спутниковым данным. Реализующее данный способ устройство, содержит модули получения цифрового картографического материала, обработки полученной информации, определения координат на местности, подключения к радиоканалу, преобразования координат, управления. Недостатками данного способа являются необходимость наличия соответствующего космического изображения, необходимость идентификации и сопоставления оператором точечных, линейных и площадных объектов местности как на ортофотоснимке, так и на растровой копии топографической карты.
Наиболее близким к предлагаемому способу является способ актуализации цифровой карты местности (пат. №2246695 РФ, МПК G01C11/10, 20.02.2005) заключающийся в формировании перечня районов и объектов, подлежащих редактированию в стационарных условиях в соответствии с результатами полевого обследования. В качестве входных данных используются как аэрофотоснимки, так и топографические карты, полученные входе полевого обследования. Реализующее данный способ устройство, содержит блоки ввода и обработки изображений, оперативное запоминающее устройство (ОЗУ), модули сканирования исходных карт, визуализации цифровой информации, обработки исходных данных, кодирования цифровых карт местности, приема и передачи полученной информации.
Недостатками данного способа являются необходимость ручной подготовки исходных данных и низкая точность при формировании множества векторных представлений горизонталей, обусловленная отсутствием устранения разрывов, а также распознавания и удаления элементов городской застройки и дорожной сети на исходных топографических картах.
Технической задачей изобретения является обеспечение автоматического режима функционирования способа формирования множества векторных представлений горизонталей. Также необходимо повысить точность автоматического распознавания горизонталей на исходных топографических картах, за счет устранения разрывов горизонталей, распознавания и удаления элементов городской застройки и дорожной сети.
Задача решается тем, что в известный способ актуализации цифровой карты местности, включающий локализацию полученных горизонталей, получение значений глубин и высот по совокупности признаков горизонталей анализируемых карт местности, добавлены локализация центров горизонталей, формирование набора цветовых слоев и выделения из них подмножеств по цветовому признаку относящихся к горизонталям, восстановление разрывов, выполняемое раздельно для подмножеств утолщенных и основных линий, вывод сформированного множества векторных представлений горизонталей. В реализующее известный способ устройство, содержащее модуль сканирования карт, контроллер ввода изображения, ОЗУ, коммуникационный контроллер, введены модули предварительной обработки изображений, выделения центров горизонталей, векторного кодирования, HSI-сегментации, поиска утолщенных горизонталей, восстановления разрывов, системная шина (СШ), причем, вход модуля сканирования карт предназначен для подачи исходных изображений, выход модуля сканирования карт подключен к входу контроллера ввода изображения, выход контроллера ввода изображения подключен к входу СШ, вход-выход ОЗУ подключен к первому входу-выходу СШ, вход-выход модуля предварительной обработки изображений подключен ко второму входу-выходу СШ, вход-выход модуля выделения центров горизонталей подключен к третьему входу-выходу СШ, вход-выход модуля векторного кодирования подключен к четвертому входу-выходу СШ, вход-выход модуля HSI-сегментации подключен к пятому входу-выходу СШ, вход-выход модуля поиска утолщенных горизонталей подключен к шестому входу-выходу СШ, вход-выход модуля восстановления разрывов подключен к седьмому входу-выходу СШ, первый вход-выход коммуникационного контроллера подключен к восьмому входу – выходу СШ, второй вход-выход коммуникационного контроллера предназначен для передачи выходных данных и команд управления.
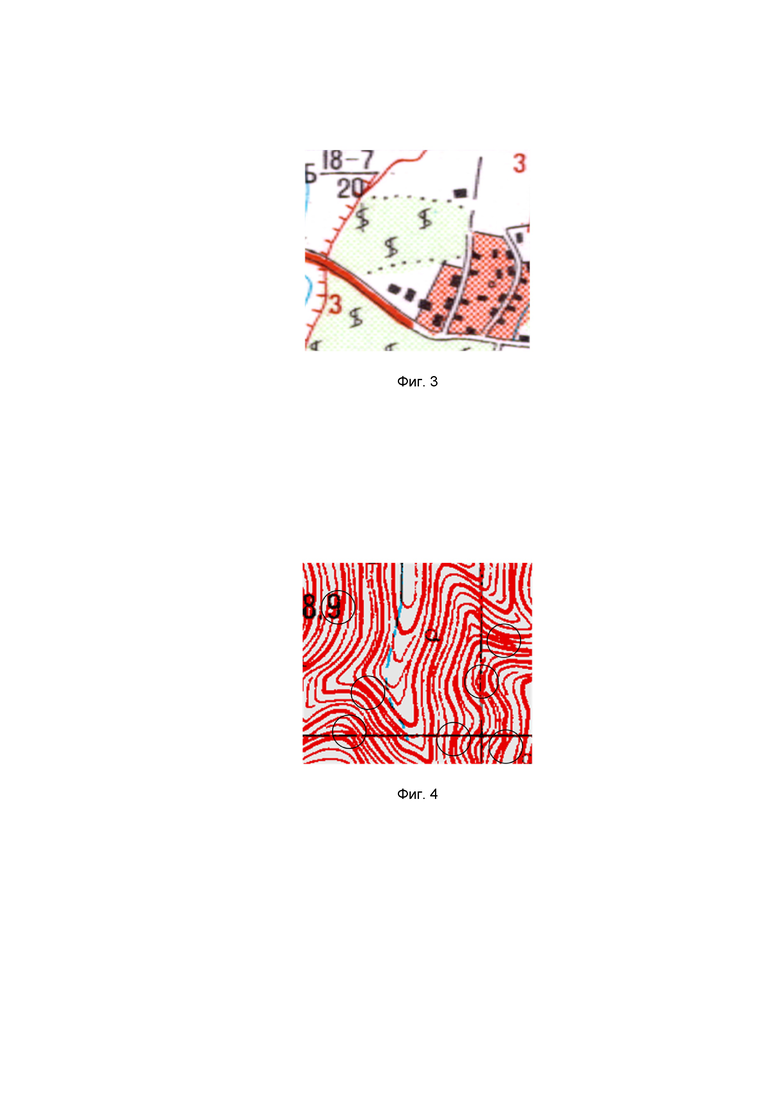
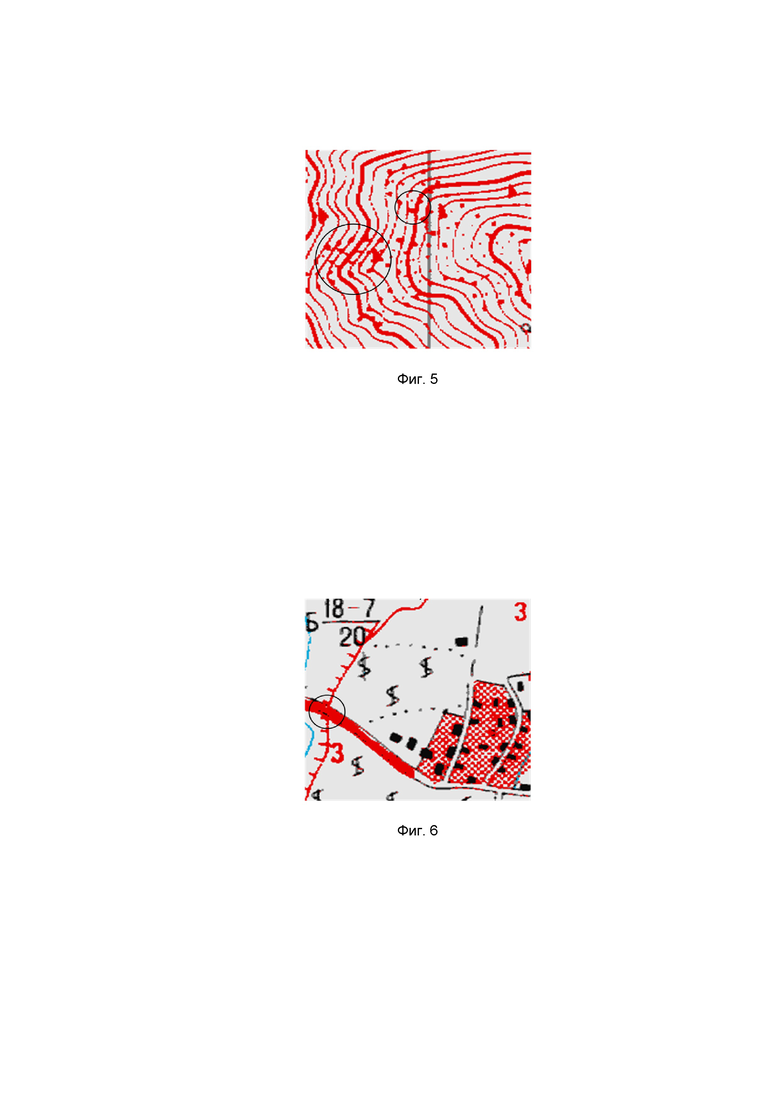
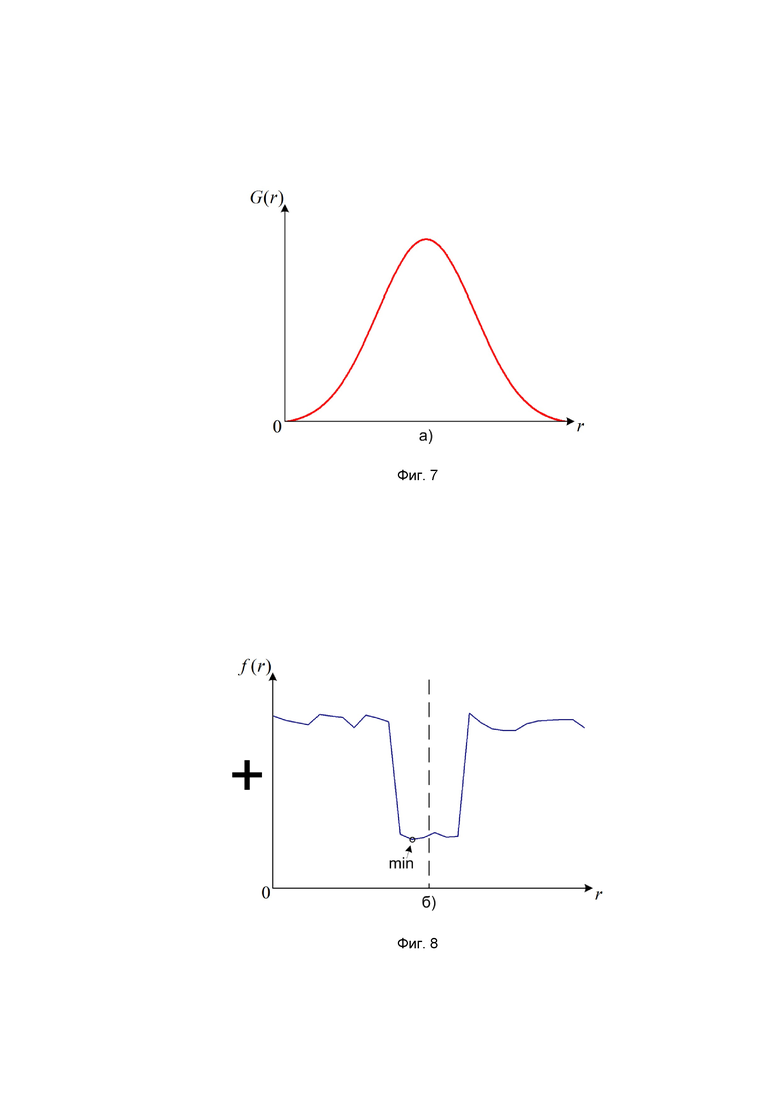
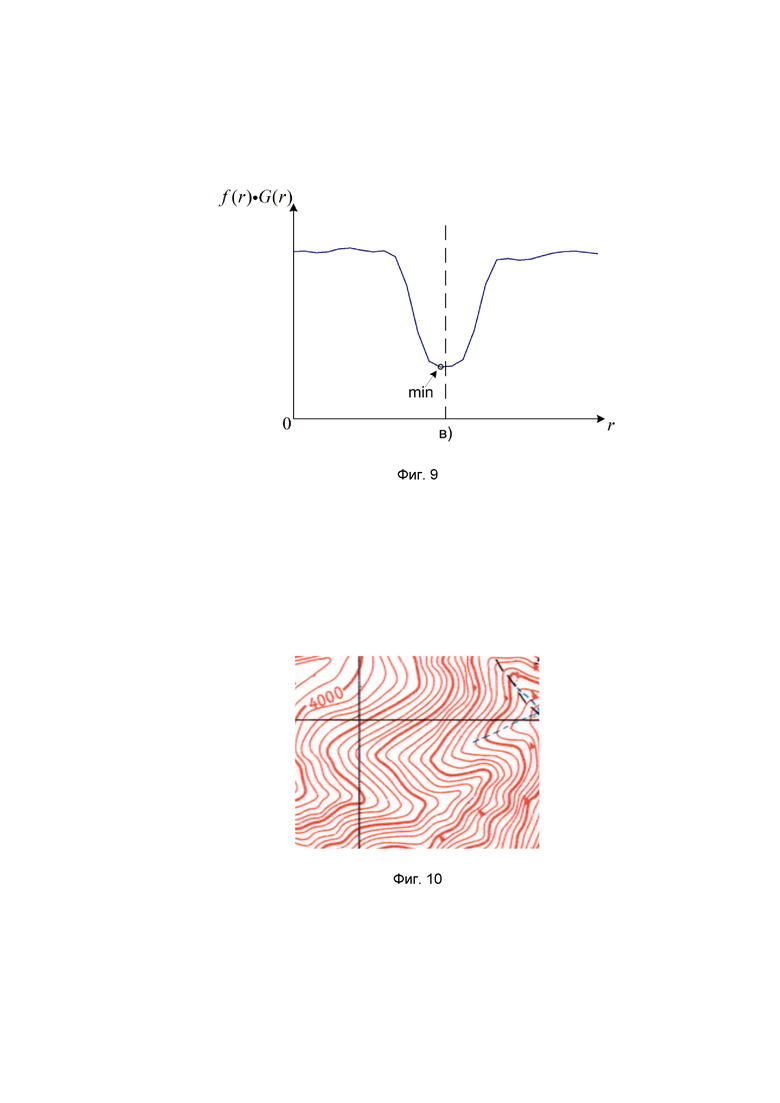
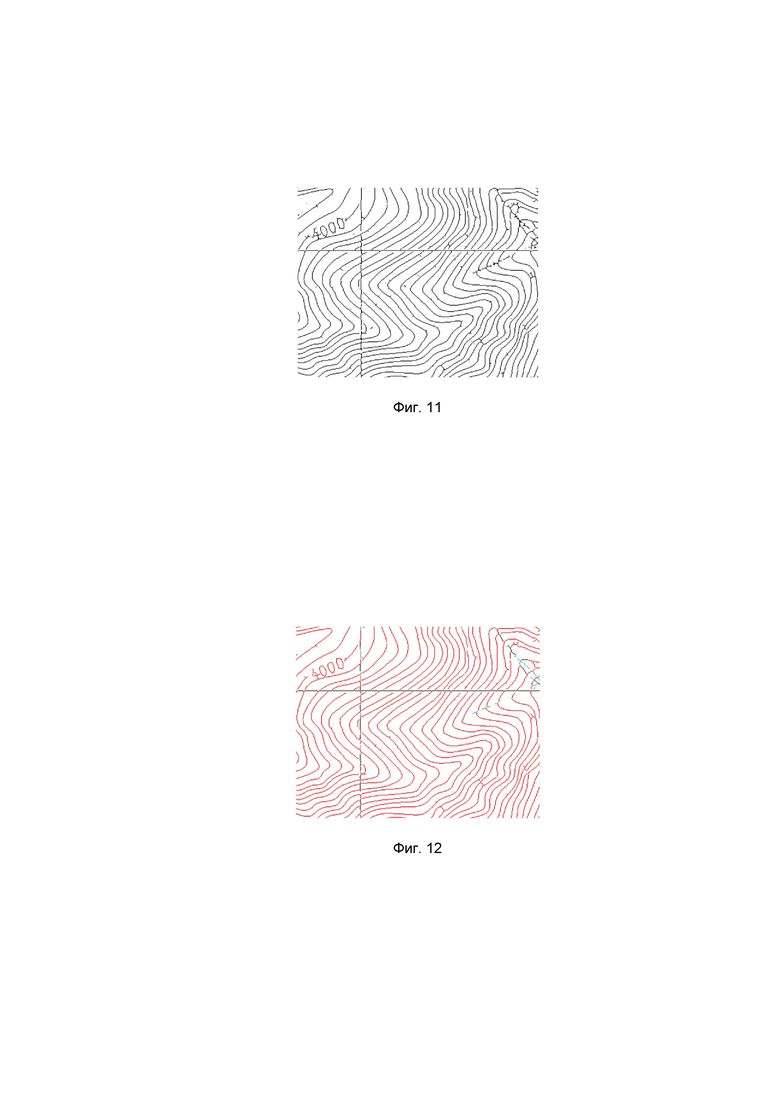
Изобретение может быть использовано для формирования множества векторных представлений горизонталей при создании и актуализации цифровых моделей рельефа с использованием в качестве исходного материала топографических карт. Сущность изобретения поясняется чертежами, где на фиг. 1 изображена топографическая карта с малым расстоянием между горизонталями, на фиг. 2 изображено наличие микрорельефа, на фиг. 3 изображены элементы городской застройки или дорожной сети, на фиг. 4 отмечены места близкорасположенных горизонталей, на фиг. 5 изображено совпадение цветов микрорельефа и горизонталей, на фиг. 6 изображено совпадение цветов горизонталей и городской застройки, дорожной сети, на фиг. 7 изображена функция НЧ-фильтра Гаусса, на фиг. 8 изображено исходное сечение функции яркости ортогонально горизонтали, на фиг. 9 представлено сечение функции яркости после фильтрации, на фиг. 10 изображена сглаженная НЧ-фильтром растровая топографическая карта, на фиг. 11 изображена бинарная карта линейных объектов, на фиг. 12 изображен набор подмножеств (слоев), полученных путем HSI-сегментации, на фиг. 13 изображен коричневый слой, на фиг. 14 изображен результат поиска линейных объектов, которые по ширине и яркости соответствуют утолщенным горизонталям, на фиг. 15 изображен результат восстановления утолщенных линий, на фиг. 16 показана блок-схема алгоритма способа формирования множества векторных представлений горизонталей, на фиг. 17 показана структурная схема устройства. Способ заключается в формировании множества векторных представлений горизонталей, в обеспечении возможностей локализации центров горизонталей с учетом наличия микрорельефа, формировании набора цветовых слоев и выделении из них подмножеств по цветовому признаку относящихся к горизонталям, корректного распознавания близкорасположенных и утолщенных горизонталей с присвоением им высот, выводе сформированного множества векторных представлений горизонталей. Существующие способы векторизации горизонталей используют бинарные карты принадлежности точек к коричневому и синему цветам. Данный подход требует длительной ручной корректировки для случаев малого расстояния между горизонталями (фиг. 1), наличия микрорельефа (фиг. 2), элементов городской застройки или дорожной сети (фиг. 3). Наиболее требовательными к временным затратам и квалификации операторов программных комплексов являются случаи разделения близко расположенных горизонталей (фиг. 4) и распознавания объектов с теми же цветами, что и анализируемые горизонтали (фиг. 5, 6). Предлагается для выделения центра горизонтали на более ярком (по сравнению с линией) фоне, применять сглаживание изображения топографической карты пространственным НЧ-фильтром с выраженным максимумом в его центре и последующим построением карты локальных минимумов функции яркости и ее цветовой сегментацией.
Применяется НЧ-фильтр Гаусса (фиг. 7), обеспечивающий частичную передачу его формы пологим участкам функции яркости изображения, что позволяет привести однородную по яркости горизонталь к форме, имеющей локальный минимум яркости в центральной части, а также подавить незначительные локальные дефекты, вызванные ошибками аналого-цифрового преобразования при сканировании топографической карты. На фиг. 8 изображено исходное сечение функции яркости ортогонально горизонтали. На фиг. 9 представлено сечение функции яркости после фильтрации.
На основе сглаженной НЧ-фильтром растровой топографической карты (фиг. 10) путем поиска локальных минимумов яркости в восьмисвязной окрестности каждой точки строится бинарная карта линейных объектов (фиг. 11), которая используется для их последующего векторного кодирования.
Преобразование линейных объектов в векторное представление обеспечивает возможность дальнейшего их анализа и присвоения значений высот, а также облегчает поиск и устранение незначительных дефектов, основными из которых являются разрывы и ответвления длиной в 1-3 точки растра.
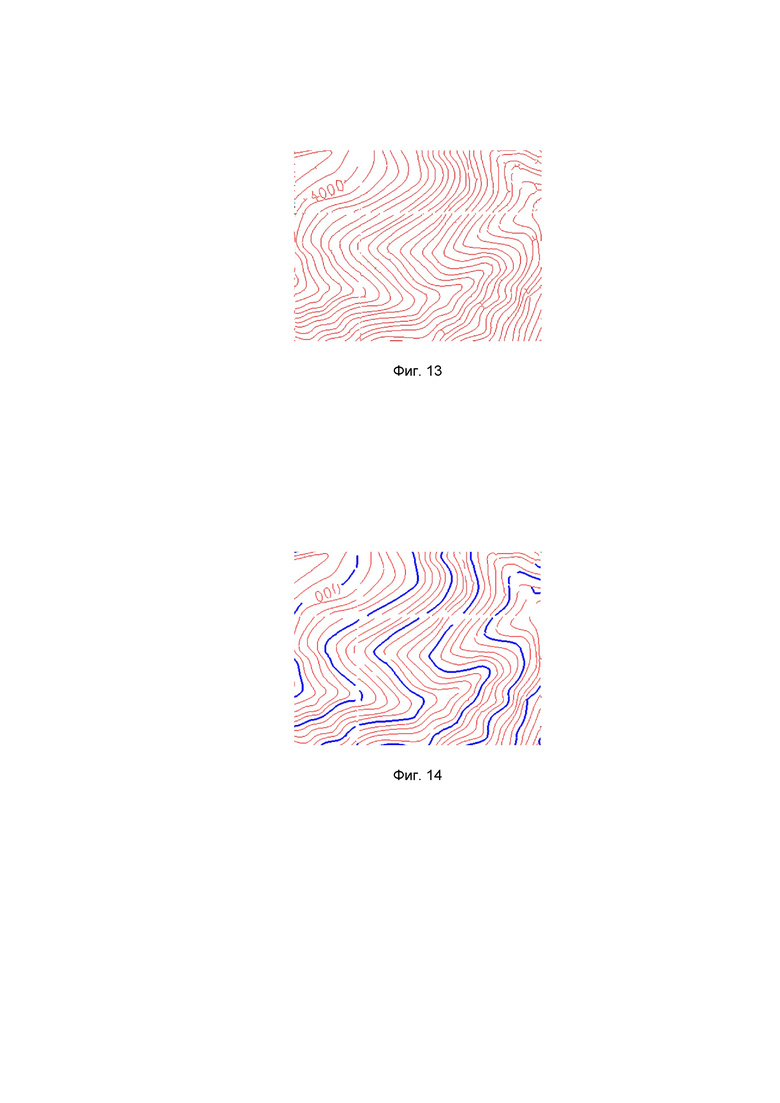
Сформированное множество векторных представлений линейных объектов преобразуется в набор подмножеств (слоев) путем HSI-сегментации, предполагающей замену яркости и цвета текущей точки значениями наиболее близкого по данным параметрам цветового класса из априори заданного для отечественных карт набора: коричневый, синий, голубой, зеленый, белый (фиг. 12). Из указанного набора цветовых слоев выделяются подмножества, соответствующие коричневому и синему. На фиг. 13 представлен коричневый слой.
В обоих подмножествах производится поиск линейных объектов, которые по ширине и яркости соответствуют утолщенным горизонталям (фиг. 14), что обеспечивает меньшее количество ошибок при:
– восстановлении разрывов (утолщенную линию невозможно ошибочно объединить с основной);
– присвоении высот горизонталям (высота утолщенной горизонтали всегда кратна пятикратному шагу горизонтали, основной – нет).
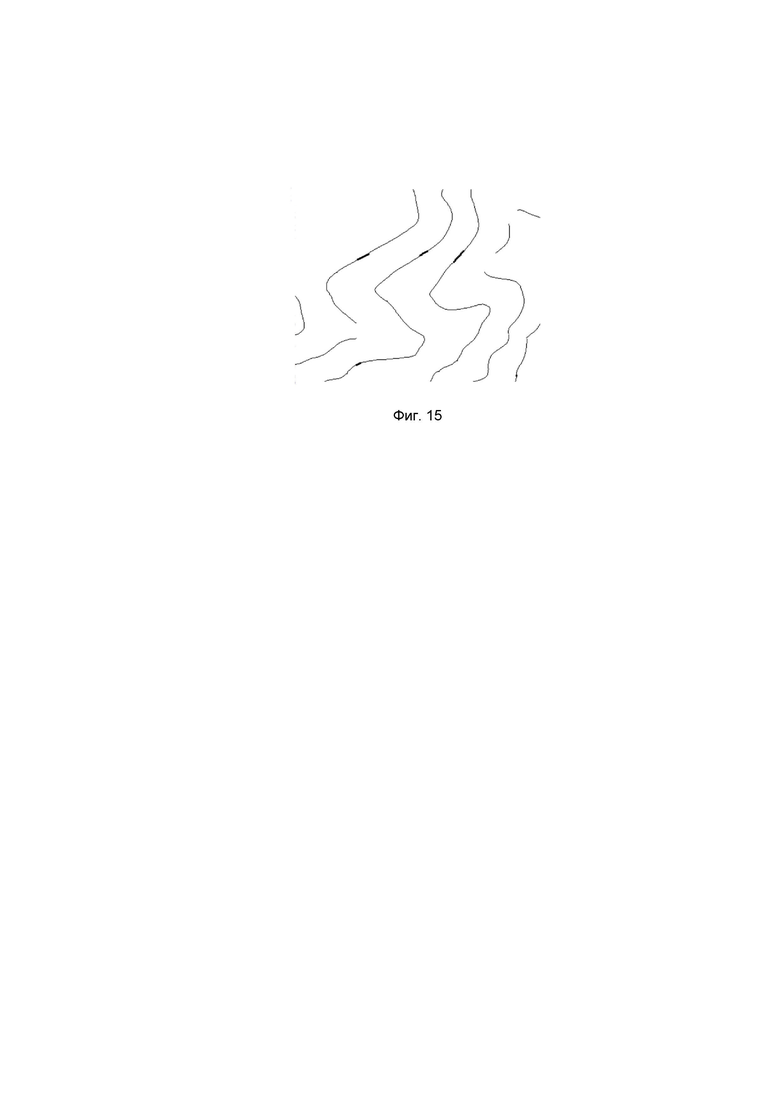
Заключительным этапом формирования множества векторных представлений горизонталей является восстановление разрывов, выполняемое раздельно для подмножеств, утолщенных и основных линий. На фиг. 15 изображен результат восстановления утолщенных линий.
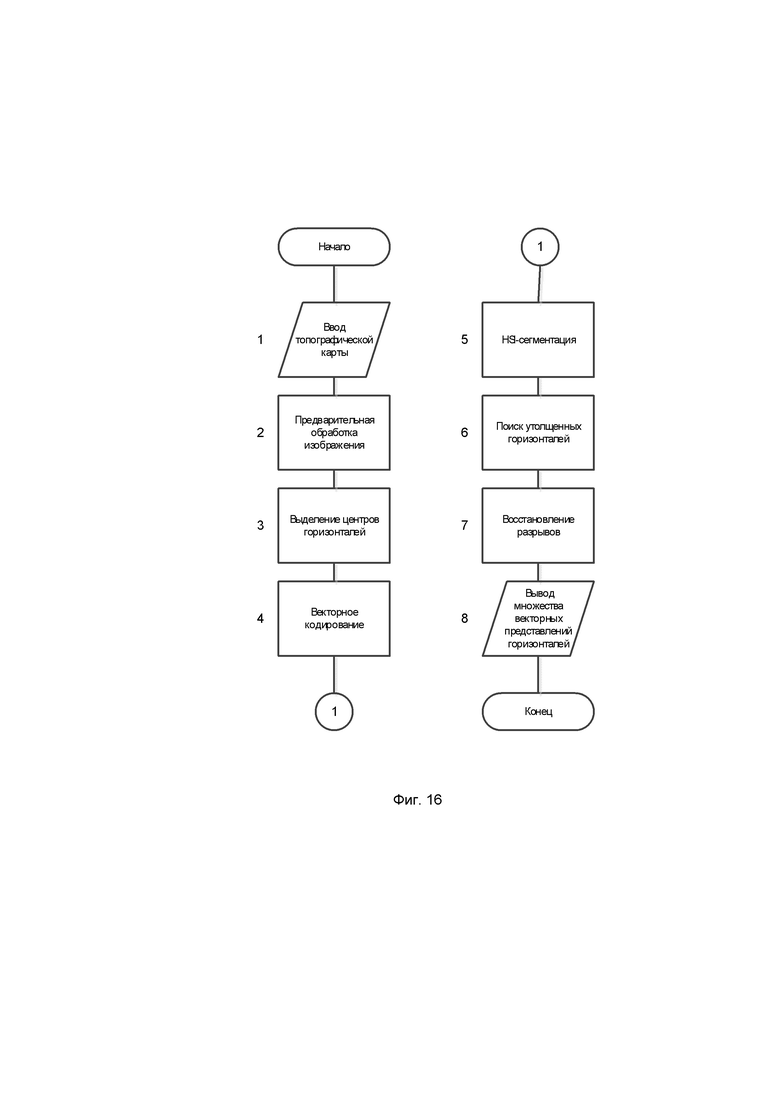
Сущность изобретения поясняется чертежом, где на фиг. 16 показана блок-схема алгоритма формирования множества векторных представлений горизонталей.
В блоке 1 (фиг.16) производится ввод изображений. В качестве исходных данных используются растровые топографические карты различных масштабов, сканированные с бумажных носителей. Далее осуществляется переход к блоку 2 (фиг. 16).
В блоке 2 (фиг. 16) производится предварительная обработка растровых топографических карт. Предварительная обработка изображения выполняется автоматически. В качестве предварительной обработки изображения используется коррекция динамического диапазона, позволяющая минимизировать ошибки, связанные с неправильной классификацией цветов (контуров). Далее осуществляется переход к блоку 3 (фиг. 16).
В блоке 3 (фиг. 16) производится выделение центров горизонталей, для чего на более ярком (по сравнению с линией) фоне используется сглаживание изображения топографической карты фильтром Гаусса. На основе сглаженной растровой топографической карты путем поиска локальных минимумов яркости в восьмисвязной окрестности каждой точки строится бинарная карта линейных объектов. Далее осуществляется переход к блоку 4 (фиг. 16).
В блоке 4 (фиг. 16) производится преобразование линейных объектов в векторное представление, что обеспечивает возможность дальнейшего их анализа и присвоения значений высот, а также облегчает поиск и устранение незначительных дефектов, основными из которых являются разрывы и ответвления длиной в 1-3 точки растра. Далее осуществляется переход к блоку 5 (фиг. 16).
В блоке 5 (фиг. 16) производится преобразование сформированного множества векторных представлений линейных объектов в набор подмножеств (слоев) путем HSI-сегментации, что предполагает замену яркости и цвета текущей точки значениями наиболее близкого по данным параметрам цветового класса из априори заданного для отечественных карт набора: коричневый, синий, голубой, зеленый, белый. Также выделяются подмножества, соответствующие коричневому и синему, из указанного набора цветовых слоев. Далее осуществляется переход к блоку 6 (фиг. 16).
В блоке 6 (фиг. 16) производится поиск утолщенных горизонталей в обоих сформированных подмножествах. Поиск осуществляется по параметрам ширины и яркости линейных объектов. Далее осуществляется переход к блоку 7 (фиг. 16).
В блоке 7 (фиг. 16) производится восстановление разрывов сформированных горизонталей. Причем данная операция выполняется раздельно для подмножеств утолщенных и основных линий. Далее осуществляется переход к блоку 8 (фиг. 16).
В блоке 8 (фиг. 16) производится вывод сформированного множества векторных представлений горизонталей.
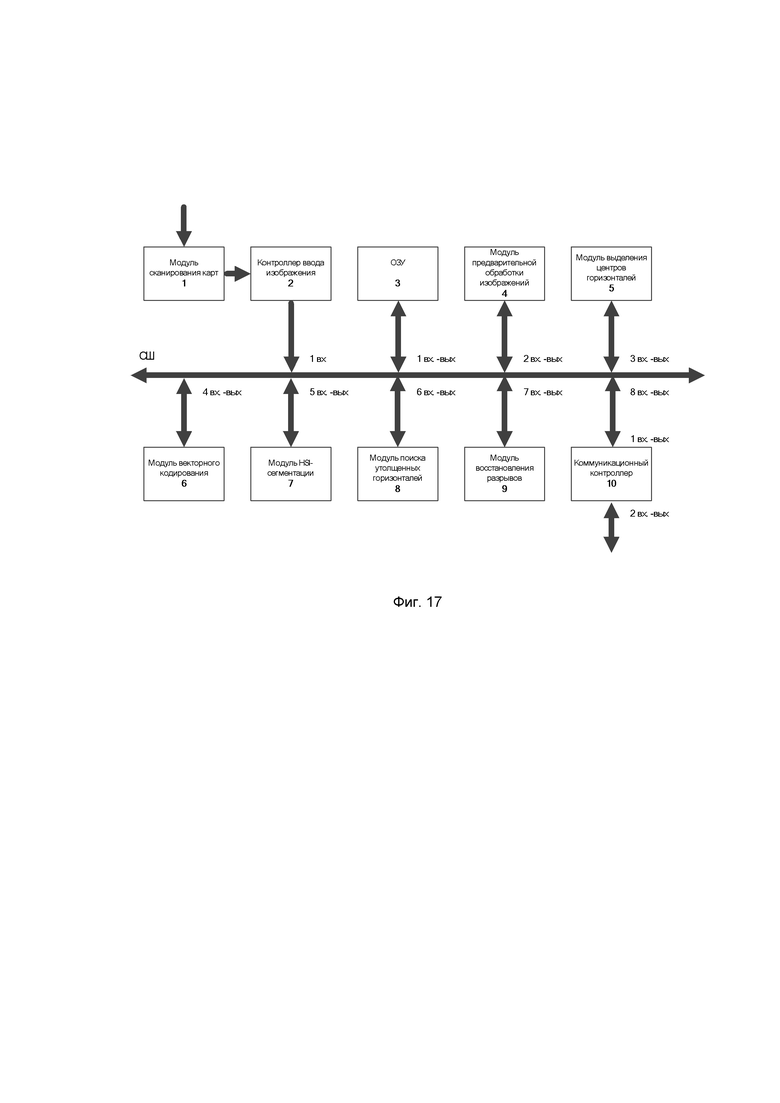
Устройство содержит (фиг. 17) модуль сканирования карт 1, контроллер ввода изображения 2, ОЗУ 3, модуль предварительной обработки изображений 4, модуль выделений центров горизонталей 5, модель векторного кодирования 6, модуль HSI-сегментации 7, модуль поиска утолщенных горизонталей 8, модуль восстановления разрывов 9, коммуникационный контроллер 10, причем, на вход модуля сканирования карт 1 подаются исходные топографические карты, выход модуля сканирования 1 подключен к входу контроллера ввода изображений 2, выход контроллера ввода изображений 2 подключен к входу СШ, вход-выход ОЗУ 3 подключен к первому входу-выходу СШ, вход-выход модуля предварительной обработки изображений 4 подключен ко второму входу-выходу СШ, вход-выход модуля выделения центров горизонталей 5 подключен к третьему входу-выходу СШ, вход-выход модуля векторного кодирования 6 подключен к четвертому входу-выходу СШ, вход-выход модуля HSI-сегментации 7 подключен к пятому входу-выходу СШ, вход-выход модуля поиска утолщенных горизонталей 8 подключен к шестому входу-выходу СШ, вход-выход модуля восстановления разрывов 9 подключен к седьмому входу-выходу СШ, первый вход-выход коммуникационного контроллера 10 подключен к восьмому входу-выходу
СШ, второй вход-выход коммуникационного контроллера 10 предназначен для передачи выходных данных и команд управления.
Модуль сканирования карт 1 предназначен для оцифровки исходных топографических карт, контроллер ввода изображений 2 предназначен для управления операцией ввода исходных изображений, быстродействующее ОЗУ 3 предназначено для сохранения изображений и параметров, модуль предварительной обработки изображений 4 предназначен для предварительной обработки растровых топографических карт, модуль выделения центров горизонталей 5 предназначен для поиска и выделения центров горизонталей, модуль векторного кодирования 6 предназначен для преобразования линейных объектов в векторное представление, модуль HSI-сегментации 7 предназначен для преобразования сформированного множества векторных представлений линейных объектов в набор подмножеств (слоев), модуль поиска утолщенных горизонталей 8 предназначен для поиска утолщенных горизонталей в сформированных подмножествах, модуль восстановления разрывов 9 предназначен для восстановления разрывов сформированных горизонталей, коммуникационный контроллер 10 служит для ввода задачи на выполнение и передачи выходных данных, СШ предназначена для связи модулей устройства.
Устройство работает следующим образом.
Исходные топографические карты подаются на вход модуля сканирования карт 1. От внешнего вычислительного устройства через коммуникационный контроллер 10 вводится задание для выполнения. С помощью контроллера ввода изображения 2 последовательно вводятся оцифрованные топографические карты. Исходные изображения передаются в быстродействующее ОЗУ 3. Далее модуль предварительной обработки изображений 4 проводит обработку растровых топографических карт. Подготовленные изображения передаются в модуль выделения центров горизонталей 5. Далее в модуле векторного кодирования 6 осуществляется преобразование линейных объектов в векторное представление. Сформированные множества векторных представлений линейных объектов в модуле HSI-сегментации 7 преобразовываются в набор подмножеств (слоев) путем HSI-сегментации. Сформированные подмножества передаются в модель поиска утолщенных горизонталей 8, где осуществляется поиск утолщенных горизонталей в сформированных подмножествах. Результат поиска утолщенных горизонталей передается в модуль восстановления разрывов 9, в котором осуществляется восстановление разрывов в найденных горизонталях. Информация о сформированном множестве восстановленных утолщенных горизонталей передается через коммуникационный контроллер 10 в качестве выходных данных.
Устройство содержит вычислительные средства, реализованные в программируемой логической интегральной схеме, предназначенные для решения задачи формирования множества векторных представлений утолщенных горизонталей на исходных топографических картах.
Устройство может быть выполнено на ПЛИС Virtex 6 фирмы Xilinx, в связке с ОЗУ, выполненным в виде готового модуля SO-DIMM. В качестве интерфейса взаимодействия можно использовать Gigabit Ethernet или PCI-Express, интегрированные аппаратно в ПЛИС предложенного семейства.
Результат работы данного способа формирования множества векторных представлений горизонталей предназначен для дальнейшего использования в работе по созданию и актуализации цифровых моделей рельефа с использованием в качестве исходного материала топографических карт.
Данное изобретение позволяет обеспечить автоматический режим функционирования способа формирования множества векторных представлений горизонталей и повысить точность выделения горизонталей на исходных топографических картах за счет локализации их центров, корректного выделения близкорасположенных линий, формирования набора цветовых слоев и выделения из них подмножеств по цветовому признаку относящихся к горизонталям, восстановления разрывов, выполняемого раздельно для подмножеств утолщенных и основных линий.

Изобретение относится к области картографии. Технический результат заключается в повышении точности автоматического распознавания горизонталей на исходных топографических картах. Способ включает локализацию полученных горизонталей, получение значений глубин и высот по совокупности признаков горизонталей анализируемых карт местности, локализацию центров горизонталей, преобразование линейных объектов в векторное представление, преобразование сформированного множества векторных представлений линейных объектов в набор слоев путем HSI-сегментации, выделение подмножеств, соответствующих коричневому и синему, из набора цветовых слоев, поиск утолщенных горизонталей в обоих сформированных подмножествах, восстановление разрывов сформированных горизонталей, выполняемое раздельно для подмножеств утолщенных и основных линий, вывод сформированного множества векторных представлений горизонталей. 2 н.п. ф-лы, 17 ил.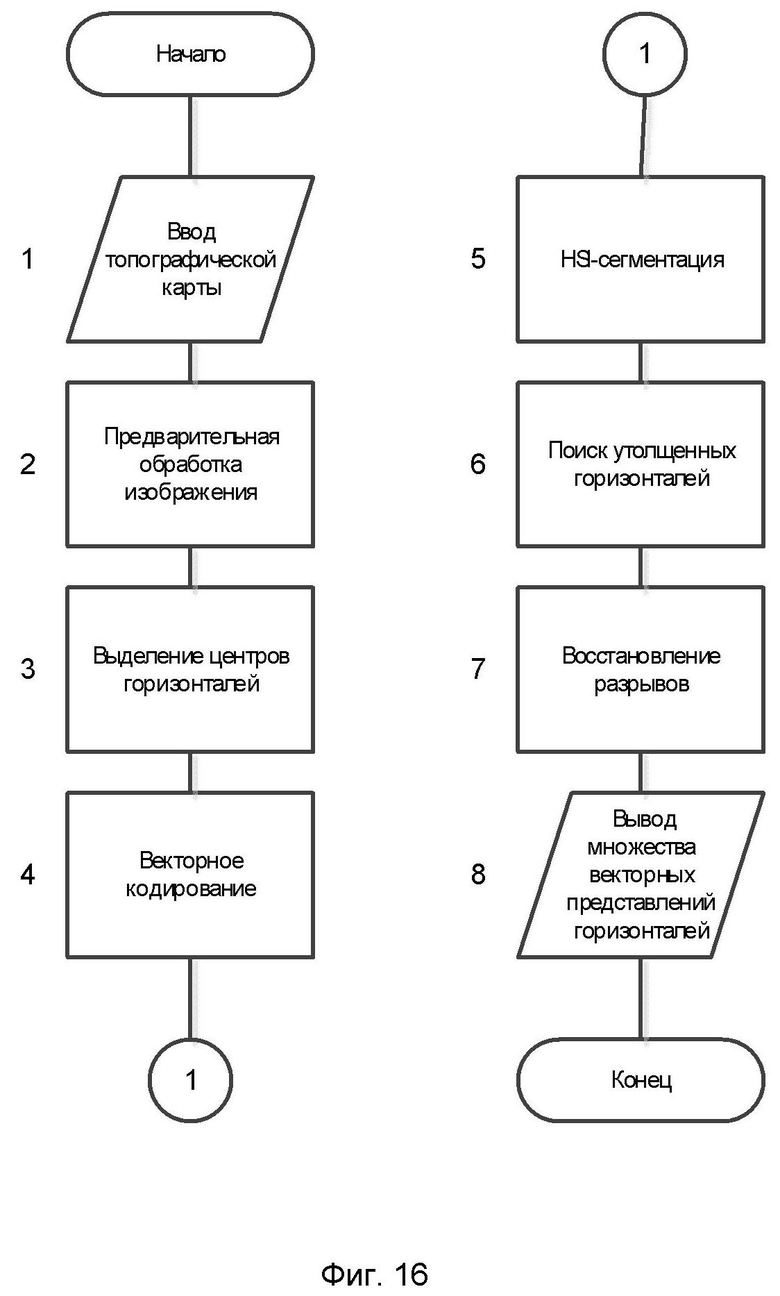
1. Способ формирования множества векторных представлений горизонталей, включающий локализацию полученных горизонталей, получение значений глубин и высот по совокупности признаков горизонталей анализируемых карт местности, отличается тем, что содержит локализацию центров горизонталей, преобразование линейных объектов в векторное представление, преобразование сформированного множества векторных представлений линейных объектов в набор слоев путем HSI-сегментации, выделение подмножеств, соответствующих коричневому и синему, из набора цветовых слоев, поиск утолщенных горизонталей в обоих сформированных подмножествах, восстановление разрывов сформированных горизонталей, выполняемое раздельно для подмножеств утолщенных и основных линий, вывод сформированного множества векторных представлений горизонталей.
2. Устройство формирования множества векторных представлений горизонталей, содержащее модуль сканирования карт, контроллер ввода изображения, ОЗУ, коммуникационный контроллер, модули предварительной обработки изображений, выделения центров горизонталей, векторного кодирования, HSI-сегментации, поиска утолщенных горизонталей, восстановления разрывов, СШ, причем, вход модуля сканирования карт предназначен для подачи исходных изображений, выход модуля сканирования карт подключен к входу контроллера ввода изображения, выход контроллера ввода изображения подключен к входу СШ, вход-выход ОЗУ подключен к первому входу-выходу СШ, вход-выход модуля предварительной обработки изображений подключен ко второму входу-выходу СШ, вход-выход модуля выделения центров горизонталей подключен к третьему входу-выходу СШ, вход-выход модуля векторного кодирования подключен к четвертому входу-выходу СШ, вход-выход модуля HSI-сегментации подключен к пятому входу-выходу СШ, вход-выход модуля поиска утолщенных горизонталей подключен к шестому входу-выходу СШ, вход-выход модуля восстановления разрывов подключен к седьмому входу-выходу СШ, первый вход-выход коммуникационного контроллера подключен к восьмому входу-выходу СШ, второй вход-выход коммуникационного контроллера предназначен для передачи выходных данных и команд управления.
| СПОСОБ АКТУАЛИЗАЦИИ ЦИФРОВОЙ КАРТЫ МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2246695C2 |
| СПОСОБ АКТУАЛИЗАЦИИ ЦИФРОВЫХ КАРТ МЕСТНОСТИ | 1999 |
|
RU2165596C1 |
| УСТРОЙСТВО СИНТЕЗА КАРТОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2004 |
|
RU2250182C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 6023278 A, 08.02.2000. | |||

