Изобретение относится к области электрических сетей и может быть использовано в устройствах поперечной компенсации с целью уменьшения потерь электрической энергии, регулирования напряжения в местах установки данных устройств в линию электропередачи (ЛЭП), а также управления мощностью, передаваемой по ЛЭП.
Известен способ управления статическим компенсатором мощности, включающий задание и формирование требуемого реактивного сопротивления статического компенсатора мощности, а также синхронизацию управляющих воздействий по изменению реактивного сопротивления компенсатора с синусоидальным напряжением сети (Патент на изобретение RU 2641643 опубл. 19.01.2018 г.).
Известен способ управления мощностью статического компенсатора мощности, работающего в сети синусоидального переменного напряжения и содержащего последовательное соединение реактивного сопротивления и управляемого источника напряжения, включающий задание генерируемой статическим компенсатором мощности, измерение напряжения на входных зажимах статического компенсатора мощности, вычисление, соответствующего заданной генерируемой мощности, значения напряжения управляемого источника напряжения и синхронные с напряжением сети воздействия на управляемый источник напряжения, обеспечивающие формирование вычисленного значения его напряжения (Патент на изобретение RU2675620 опубл. 21.12.2018 г.).
Общий недостаток известных способов состоит в том, что они позволяют изменять только реактивную составляющую мощности статического компенсатора, оставляя неизменной ее активную составляющую, при этом дискретность указанных изменений ограничена возможностями переключения одного управляемого элемента (реактивного сопротивления в патенте RU 2641643 или источника напряжения в патенте RU 2675620).
Техническим результатом заявляемого изобретения является расширение функциональных возможностей статического компенсатора мощности, позволяющее регулировать с уменьшенным интервалом дискретности как реактивную, так и активную мощности статического компенсатора и, соответственно, линии электропередачи в точке подключения к ней статического компенсатора мощности.
Предметом изобретения является способ управления мощностью статического компенсатора мощности, работающего в сети синусоидального переменного напряжения и содержащего последовательное соединение управляемого реактивного сопротивления и управляемого источника напряжения, включающий задание генерируемой статическим компенсатором мощности, измерение напряжения на входных зажимах статического компенсатора мощности, вычисление, соответствующих заданной генерируемой мощности, значений напряжения управляемого источника напряжения и управляемого реактивного сопротивления, синхронные с напряжением сети воздействия на управляемый источник напряжения и на управляемое реактивное сопротивление, обеспечивающие формирование указанных вычисленных значений напряжения и сопротивления, при этом напряжение управляемого источника напряжения формируют с фазовым сдвигом относительно напряжения сети.
Изобретение имеет развитие, которое состоит в том, что напряжение управляющего устройства формируют путем суммирования мгновенных значений двух сдвинутых во времени регулируемых синусоидальных напряжений.
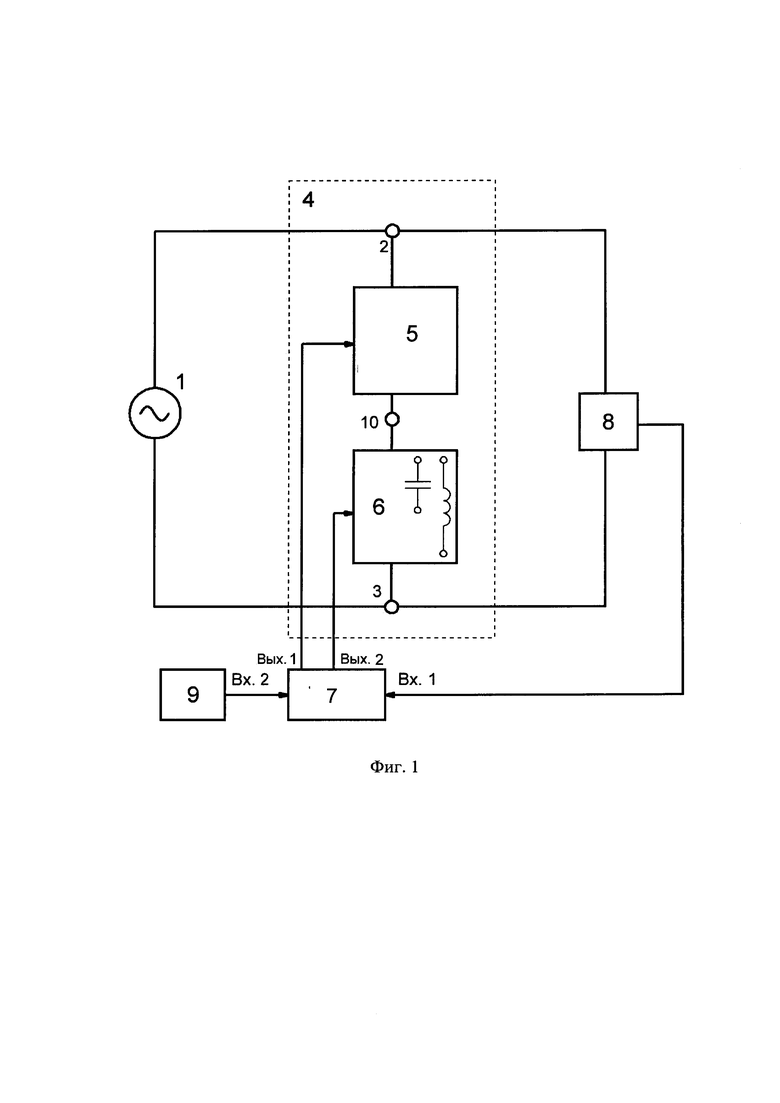
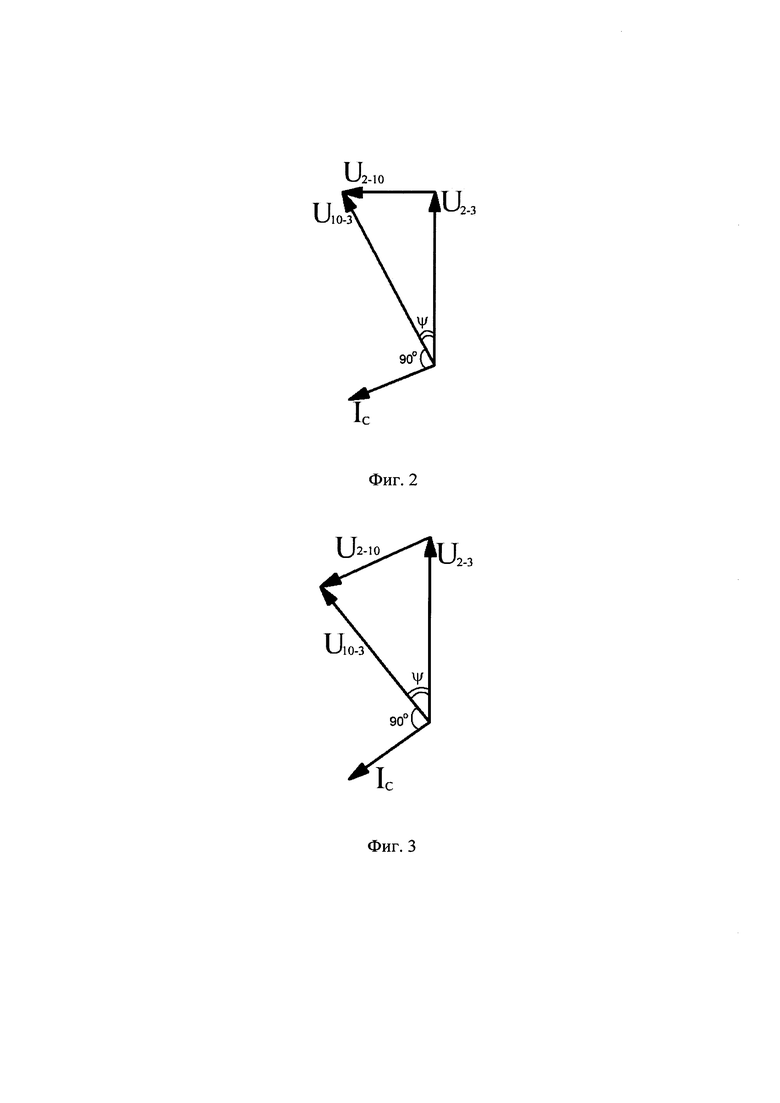
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема устройства, реализующего предлагаемый способ, на фиг. 2 и фиг. 3 приведены векторные диаграммы напряжений и токов в основных точках схемы, представленной на фиг. 1.
На фиг. 1 сеть синусоидального переменного напряжения отображена источником синусоидального переменного напряжения 1, параллельно которому своими зажимами 2 и 3 подключен статический компенсатор мощности 4, содержащий последовательно соединенные управляемый источник 5 напряжения и управляемое реактивное сопротивление 6.
К управляющему входу источника 5 подключен первый выход системы управления 7, к управляющему входу сопротивления 6 - ее второй выход. Входы системы управления 7 соединены с выходом датчика напряжения 8, измеряющего напряжение на зажимах 2 и 3 статического компенсатора мощности 4, и с выходом блока 9 задания мощности компенсатора 4. Общая точка последовательно соединенных источника 5 и сопротивления 6 обозначена на фиг. 1 цифрой 10.
Заявляемый способ управления осуществляется следующим образом.
Полная мощность, генерируемая компенсатором мощности 4, определяется величиной реактивного сопротивления 6, величиной синусоидального напряжения U2-10, формируемого источником 5 между точками 2 и 10, а также сдвигом фазы этого напряжения по отношению к синусоидальному напряжению U2-3 на зажимах 2-3. В качестве сопротивления 6 могут выступать как индуктивный реактор, так и конденсатор. Мгновенное значение синусоидального напряжения, приложенного к сопротивлению 6, определяется алгебраической суммой мгновенных значений напряжения U2-3 и напряжения U2-10, формируемого источником 5 между зажимом 2 и точкой 10. В рассматриваемом на фиг. 2 примере предполагается, что напряжение U2-10 источника 5 опережает на 90 электрических градусов напряжение U2-3. На векторной диаграмме, построенной в комплексной плоскости, напряжение U10-3 на реактивном сопротивлении 6 определяется векторной суммой двух, сдвинутых по фазе на 90 электрических градусов векторов напряжений U2-3 и U2-10. Если в качестве реактивного сопротивления 6 используется конденсатор, то вектор тока Iс, протекающего через сопротивление 6, будет опережать вектор напряжения U10-3 на сопротивлении 6, на 90 электрических градусов. Как видно из фиг. 2, угол сдвига фаз между током Iс и напряжением U2-3 превышает 90 электрических градусов на угол ψ между напряжениями U2-3 и U10-3.
В общем случае, напряжение U2-10, сформированное источником 5, может иметь произвольный угол сдвига фазы относительно напряжения U2-3, как это показано на фиг. 3.
Комплексные значения напряжения U2-3 и тока Iс компенсатора мощности 4 определяются согласно, выражениями (1) и (2), а его полная мощность S2-3 вычисляется по выражению (3).



Как следует из выражения (3), при наличии угла сдвига ψ между напряжениями U2-3 и U10-3, компенсатор мощности 4 формирует на зажимах 2-3 не только реактивную мощность, определяемую вторым членом в правой части выражения (3), но и активную мощность, определяемую первым членом в правой части выражения (3).
При получении от блока 9 нового заданного значения требуемой от компенсатора 4 мощности S2-3, система управления 7 определяет (вычисляет), например, требуемую величину (действующее значение) синусоидального напряжения U2-10, формируемого на выходе источника 5, и фазовый сдвиг напряжения U2-10 относительно напряжения U2-3 на зажимах 2-3 статического компенсатора мощности 4 и необходимую величину реактивного сопротивления 6 соответствующие управляющие воздействия.
В другом частном случае для формирования комплексного напряжения U2-10 с фазовым сдвигом относительно напряжения U2-3 сети могут быть использованы два регулируемых по модулю синусоидальных напряжения, сдвинутые по фазе на 90 электрических градусов. В трехфазных электрических сетях в качестве таких напряжений могут быть использованы фазное напряжение одной фазы (например, напряжение Ua фазы А) и линейное напряжение между двумя другими фазами (например, напряжение Ubc - между фазами В и С). На векторной диаграмме трехфазной системы эти напряжения всегда перпендикулярны друг относительно друга. Таким образом, применение раздельного регулирования величин (модулей) этих напряжений в источнике 5 позволит регулировать не только величину (модуль) напряжения комплексного напряжения U2-10, но и фазовый сдвиг этого напряжения относительно напряжения U2-3 в диапазоне от 0 до 360 электрических градусов.
В качестве управляемого реактивного сопротивления 6 могут быть использованы управляемые реакторные и конденсаторные группы (например, известная из патента RU 2631678 «Реакторная группа, коммутируемая тиристорами»).
Для сокращения длительности переходных процессов управляющие воздействия на источник 5, обеспечивающие формирование вычисленных значений величины и фазового сдвига комплексного напряжения U2-10, и воздействия на сопротивление 6, обеспечивающие формирование его вычисленного значения, выполняют синхронно с напряжением сети, информация о котором, поступает на вход системы управления 7 с выхода датчика напряжения 8. Моменты синхронного воздействия выбирают в зависимости от вида управляемого реактивного сопротивления 6 (индуктивный реактор или конденсатор), используемого в составе компенсатора мощности 4.
Из вышеизложенного видно, что формирование напряжения источника 5 (напряжения U2-10) с фазовым сдвигом относительно напряжения сети (напряжение U2-3) и управление реактивным сопротивлением 6 позволяет с уменьшенным интервалом дискретизации регулировать не только реактивную, но и активную мощность компенсатора мощности 4. Например, управление только одной ступенью дискретного регулирования реактивного сопротивления 6 позволяет в два раза увеличить число дискретных значений регулируемой мощности компенсатора.
Таким образом, использование совокупности признаков заявляемого способа управления расширяет функциональные возможности устройства, позволяя с уменьшенным интервалом дискретности (и соответственно с повышенной точностью) регулировать как реактивную, так и активную мощности в точке подключения статического компенсатора мощности к линии электропередачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления мощностью статического компенсатора мощности, работающего в сети синусоидального переменного напряжения | 2020 |
|
RU2726935C1 |
| ТРЕХФАЗНЫЙ СТАТИЧЕСКИЙ КОМПЕНСАТОР МОЩНОСТИ | 2020 |
|
RU2745329C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2020 |
|
RU2742942C1 |
| ТРЕХФАЗНЫЙ СТАТИЧЕСКИЙ КОМПЕНСАТОР МОЩНОСТИ | 2020 |
|
RU2734399C1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ СТАТИЧЕСКОГО КОМПЕНСАТОРА РЕАКТИВНОЙ МОЩНОСТИ, РАБОТАЮЩЕГО В СЕТИ СИНУСОИДАЛЬНОГО ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2018 |
|
RU2675620C1 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ СТАТИЧЕСКОГО КОМПЕНСАТОРА РЕАКТИВНОЙ МОЩНОСТИ, РАБОТАЮЩЕГО В СЕТИ СИНУСОИДАЛЬНОГО НАПРЯЖЕНИЯ | 2023 |
|
RU2804403C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2749279C1 |
| Способ управления мощностью статического компенсатора реактивной мощности, работающего в сети синусоидального переменного напряжения | 2022 |
|
RU2792862C1 |
| Статический компенсатор реактивной мощности | 2022 |
|
RU2786130C1 |
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ В ПИТАЮЩЕЙ СЕТИ | 2011 |
|
RU2498475C2 |
Изобретение относится к области электрических сетей и может быть использовано в устройствах поперечной компенсации с целью уменьшения потерь электрической энергии, регулирования напряжения в местах установки данных устройств в линию электропередачи (ЛЭП), а также управления мощностью, передаваемой по ЛЭП. Техническим результатом заявляемого изобретения является расширение функциональных возможностей статического компенсатора мощности, позволяющее регулировать с уменьшенным интервалом дискретности как реактивную, так и активную мощности статического компенсатора и соответственно линии электропередачи в точке подключения к ней статического компенсатора мощности. Способ управления мощностью статического компенсатора мощности, работающего в сети синусоидального переменного напряжения и содержащего последовательное соединение управляемого реактивного сопротивления и управляемого источника напряжения, включает задание генерируемой статическим компенсатором мощности, измерение напряжения на входных зажимах статического компенсатора мощности, вычисление соответствующих заданной генерируемой мощности значений напряжения управляемого источника напряжения и управляемого реактивного сопротивления, синхронных с напряжением сети воздействия на управляемый источник напряжения и на управляемое реактивное сопротивление, обеспечивающих формирование указанных вычисленных значений напряжения и сопротивления. При этом напряжение управляемого источника напряжения формируют с фазовым сдвигом относительно напряжения сети, например, путем суммирования мгновенных значений двух сдвинутых во времени регулируемых синусоидальных напряжений. 1 з.п. ф-лы, 3 ил.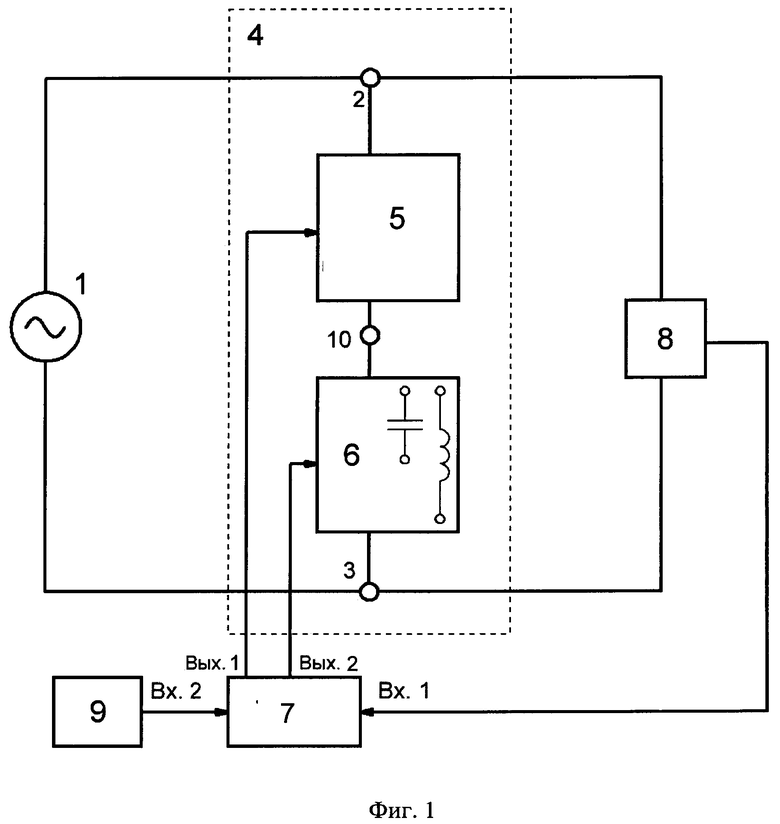
1. Способ управления мощностью статического компенсатора мощности, работающего в сети синусоидального переменного напряжения и содержащего последовательное соединение управляемого реактивного сопротивления и управляемого источника напряжения, включающий задание генерируемой статическим компенсатором мощности, измерение напряжения на входных зажимах статического компенсатора мощности, вычисление соответствующих заданной генерируемой мощности значений напряжения управляемого источника напряжения и управляемого реактивного сопротивления, синхронных с напряжением сети воздействия на управляемый источник напряжения и на управляемое реактивное сопротивление, обеспечивающих формирование указанных вычисленных значений напряжения и сопротивления, при этом напряжение управляемого источника напряжения формируют с фазовым сдвигом относительно напряжения сети.
2. Способ по п. 1, отличающийся тем, что напряжение управляемого источника напряжения формируют путем суммирования мгновенных значений двух сдвинутых во времени регулируемых синусоидальных напряжений.
| СПОСОБ УПРАВЛЕНИЯ УПРАВЛЯЕМЫМ ШУНТИРУЮЩИМ РЕАКТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2641643C2 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ СТАТИЧЕСКОГО КОМПЕНСАТОРА РЕАКТИВНОЙ МОЩНОСТИ, РАБОТАЮЩЕГО В СЕТИ СИНУСОИДАЛЬНОГО ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2018 |
|
RU2675620C1 |
| US 7638986 B2, 29.12.2009 | |||
| EP 3261209 A1, 09.01.2019. | |||

