ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе для обработки части тела, подлежащей обработке. Например, настоящее изобретение относится к системе для стрижки волос на части тела, подлежащей обработке. Настоящее изобретение также относится к способу обработки части тела, подлежащей обработке.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Системы для обработки части тела, например, посредством стрижки волос на части тела, подлежащей обработке, (например, теле человека или животного), включают приводные ручные устройства, например триммеры, которые располагаются на части тела пользователя или субъекта и перемещаются по областям, где необходимо подстригать волосы. Такие системы включают механические подстригающие устройства для волос. Пользователь системы типично выбирает длину подстригания посредством регулирования или выбора направляющей, например гребенки или ограничителя, которая проходит по режущему ножу, и затем выбирает какие области волос подстригать, а какие области не следует подстригать, посредством позиционирования и перемещения устройства надлежащим образом.
При стрижке собственных волос пользователя, или чьих-то еще волос, большой опыт требуется для создания конкретного стиля прически или для обеспечения презентабельного результата. Следовательно, прилагаются усилия для обеспечения систем, которые обеспечивают возможность автоматического подстригания волос и создания конкретного стиля прически. Некоторые типы устройств удерживаются субъектом или пользователем во время использования, и длина подстригания волос регулируется автоматически в соответствии с положением устройства на части тела. Таким образом, эти типы устройств требуют некоторых средств для обеспечения возможности определения устройством своего положения на части тела.
WO 2013/096572 описывает одну такую автоматическую подстригающую систему для волос, в которой позиционирующая конструкция располагается на пользователе, и подстригающее устройство для волос взаимодействует с позиционирующей конструкцией для определения положения подстригающего устройства для волос относительно базовой точки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Следует понимать, что системы, например, системы, показанные в WO 2013/096572, которые требуют конструкции, подлежащей ношению пользователем или расположению на пользователе, не являются особенно удобными для субъекта для использования, и является желательным обеспечить систему и/или способ обработки части тела, подлежащей обработке, который по существу уменьшает или преодолевает проблемы, упомянутые выше, и не требует позиционирующей конструкции, отдельной от ручного устройства, подлежащего использованию.
В соответствии с первым аспектом, предложена обрабатывающая система, содержащая контроллер и обрабатывающее устройство, при этом обрабатывающее устройство содержит: обрабатывающий узел для обработки части тела субъекта; и формирующую изображение конструкцию, которая выполнена с возможностью получения данных изображения; в которой контроллер выполнен с возможностью анализа данных изображения для определения граничного участка между частью тела субъекта и окружающим пространством вокруг части тела; и определения положения обрабатывающего устройства относительно части тела субъекта на основании положения граничного участка в данных изображения.
В некоторых вариантах осуществления, контроллер содержится в обрабатывающем устройстве. В альтернативных вариантах осуществления, контроллер содержится в базовом узле для обрабатывающего устройства, и обрабатывающее устройство выполнено с возможностью передачи данных изображения на контроллер в базовом узле.
В некоторых вариантах осуществления, формирующая изображение конструкция содержит датчик температуры, термический или инфракрасный, ИК, датчик или группу датчиков. В этих вариантах осуществления, контроллер может быть выполнен с возможностью определения граничного участка на основании разницы между теплом, излучаемым субъектом, относительно тепла, излучаемого окружающей средой.
В альтернативных вариантах осуществления, формирующая изображение конструкция содержит датчик видимого света или группу датчиков. В этих вариантах осуществления, контроллер выполнен с возможностью определения граничного участка на основании разницы между цветом и/или формой части тела относительно цвета и/или формы окружающей среды.
В некоторых вариантах осуществления, контроллер выполнен с возможностью определения положения обрабатывающего устройства на основании расстояния граничного участка от края изображения, полученного из данных изображения.
В некоторых вариантах осуществления, часть тела субъекта представляет собой голову субъекта, и в которой контроллер выполнен с возможностью определения высоты обрабатывающего устройства на голове на основании расстояния граничного участка от верхнего или нижнего края изображения, полученного из данных изображения.
В некоторых вариантах осуществления, часть тела субъекта представляет собой голову субъекта, и контроллер выполнен с возможностью определения уха субъекта в данных изображения и (i) определения высоты обрабатывающего устройства на голове на основании расстояния граничного участка от верхнего или нижнего края изображения и положения уха на изображении; и/или (ii) определения того, находится ли обрабатывающее устройство на боковой части или задней части головы на основании положения уха на изображении, полученном из данных изображения.
В альтернативных вариантах осуществления, формирующая изображение конструкция содержит один или более датчиков дальности, которые выполнены с возможностью измерения расстояния от формирующей изображение конструкции до ближайшего объекта в одном или более предварительно заданных направлениях от формирующей изображение конструкции. В этих вариантах осуществления, контроллер может быть выполнен с возможностью определения граничного участка на основании того, какое из измеренных расстояний превышает пороговую величину.
В альтернативных вариантах осуществления, формирующая изображение конструкция содержит один или более датчиков близости, которые выполнены с возможностью определения того, находится ли объект в пределах порогового расстояния до формирующей изображение конструкции в одном или более предварительно заданных направлениях от формирующей изображение конструкции. В этих вариантах осуществления, контроллер может быть выполнен с возможностью определения граничного участка на основании того, в каком предварительно заданном направлении объект определяется в пределах порогового расстояния.
В некоторых вариантах осуществления, контроллер дополнительно выполнен с возможностью определения обрабатывающего действия для части тела субъекта в определенном положении обрабатывающего устройства; и выдачи сигнала управления на обрабатывающий узел для настройки обрабатывающего узла на выполнение определенного обрабатывающего действия.
В некоторых вариантах осуществления, контроллер дополнительно выполнен с возможностью определения необходимости обрабатывающего действия для части тела субъекта в определенном положении обрабатывающего устройства; и выдачи сигнала управления на обрабатывающий узел для активации или деактивации обрабатывающего узла в соответствии с необходимостью обрабатывающего действия.
В некоторых предпочтительных вариантах осуществления, обрабатывающая система представляет собой подстригающую систему для волос, обрабатывающее устройство представляет собой подстригающее устройство, и обрабатывающий узел представляет собой подстригающий узел для стрижки волос на субъекте.
В этих вариантах осуществления, длина подстригания волос подстригающего узла может быть настраиваемой на основании сигнала управления от контроллера, и контроллер может быть дополнительно выполнен с возможностью определения длины волос для волос субъекта в определенном положении подстригающего устройства для волос; и выдачи сигнала управления на подстригающий узел для настройки подстригающего узла для стрижки волос на определенную длину волос.
В этих вариантах осуществления, контроллер может быть выполнен с возможностью определения длины волос для волос субъекта в соответствии с предварительно заданной моделью, которая указывает длину волос во множестве возможных положений подстригающего устройства для волос на части тела субъекта.
В этих вариантах осуществления, часть тела субъекта может представлять собой голову субъекта, и контроллер может быть выполнен с возможностью определения меньшей длины волос для волос субъекта, если определяется, что подстригающее устройство для волос находится на боковой части головы, чем длина волос, если определяется, что подстригающее устройство для волос находится на верхней части головы.
В этих вариантах осуществления, часть тела субъекта может представлять собой голову субъекта, и контроллер может быть выполнен с возможностью определения первой длины волос для волос субъекта, когда определяется, что подстригающее устройство для волос находится рядом или на линии роста волос на боковых частях или задней части головы субъекта, и второй длины волос для волос, когда определяется, что подстригающее устройство для волос находится на удалении от линии роста волос на боковых частях или задней части головы, причем первая длина волос меньше второй длины волос.
В соответствии со вторым аспектом, предложен способ определения положения обрабатывающего устройства обрабатывающей система, при этом обрабатывающее устройство содержит обрабатывающий узел для обработки части тела субъекта; при этом способ содержит получение данных изображения, используя формирующую изображение конструкцию; анализ данных изображения для определения граничного участка между частью тела субъекта и окружающим пространством вокруг части тела; и определение положения обрабатывающего устройства относительно части тела субъекта на основании положения граничного участка в данных изображения.
В некоторых вариантах осуществления, формирующая изображение конструкция содержит датчик температуры, термический или инфракрасный, ИК, датчик или группу датчиков. В этих вариантах осуществления, этап анализа может содержать определение граничного участка на основании разницы между теплом, излучаемым субъектом, относительно тепла, излучаемого окружающей средой.
В альтернативных вариантах осуществления, формирующая изображение конструкция содержит датчик видимого света или группу датчиков. В этих вариантах осуществления, этап анализа может содержать определение граничного участка на основании разницы между цветом и/или формой части тела относительно цвета и/или формы окружающей среды.
В некоторых вариантах осуществления, этап определения может содержать определение положения обрабатывающего устройства на основании расстояния граничного участка от края изображения, полученного из данных изображения.
В некоторых вариантах осуществления, часть тела субъекта представляет собой голову субъекта, и этап определения может содержать определение высоты обрабатывающего устройства на голове на основании расстояния граничного участка от верхнего или нижнего края изображения, полученного из данных изображения.
В некоторых вариантах осуществления, часть тела субъекта представляет собой голову субъекта, и способ дополнительно содержит этап определения уха субъекта в данных изображения, и в котором этап определения содержит определение высоты обрабатывающего устройства на голове на основании расстояния граничного участка от верхнего или нижнего края изображения и положения уха на изображении.
В некоторых вариантах осуществления, часть тела субъекта представляет собой голову субъекта, и способ дополнительно содержит этап определения уха субъекта в данных изображения, и этап определения содержит определение того, находится ли обрабатывающее устройство на боковой части или задней части головы на основании положения уха на изображении, полученном из данных изображения.
В альтернативных вариантах осуществления, формирующая изображение конструкция содержит один или более датчиков дальности, которые выполнены с возможностью измерения расстояния от формирующей изображение конструкции до ближайшего объекта в одном или более предварительно заданных направлениях от формирующей изображение конструкции. В этих вариантах осуществления, этап анализа может содержать определение граничного участка на основании того, какое из измеренных расстояний превышает пороговую величину.
В альтернативных вариантах осуществления, формирующая изображение конструкция содержит один или более датчиков близости, которые выполнены с возможностью определения того, находится ли объект в пределах порогового расстояния до формирующей изображение конструкции в одном или более предварительно заданных направлениях от формирующей изображение конструкции. В этих вариантах осуществления, этап анализа может содержать определение граничного участка на основании того, в каком предварительно заданном направлении объект определяется в пределах порогового расстояния.
В некоторых вариантах осуществления, способ дополнительно содержит этапы определения обрабатывающего действия для части тела субъекта в определенном положении обрабатывающего устройства; и выдачи сигнала управления на обрабатывающий узел для настройки обрабатывающего узла на выполнение определенного обрабатывающего действия.
В некоторых вариантах осуществления, способ дополнительно содержит этапы определения необходимости обрабатывающего действия для части тела субъекта в определенном положении обрабатывающего устройства; и выдачи сигнала управления на обрабатывающий узел для активации или деактивации обрабатывающего узла в соответствии с необходимостью обрабатывающего действия.
В некоторых предпочтительных вариантах осуществления, обрабатывающая система представляет собой подстригающую систему для волос, обрабатывающее устройство представляет собой подстригающее устройство, и обрабатывающий узел представляет собой подстригающий узел для стрижки волос на субъекте.
В этих вариантах осуществления, длина подстригания волос подстригающего узла может быть регулируемой на основании сигнала управления, и способ может дополнительно содержать этапы определения длины волос для волос субъекта в определенном положении подстригающего устройства для волос; и выдачи сигнала управления на подстригающий узел для настройки подстригающего узла для стрижки волос на определенную длину волос.
В этих вариантах осуществления, этап определения длины волос может содержать определение длины волос для волос субъекта в соответствии с предварительно заданной моделью, которая указывает длину волос во множестве возможных положений подстригающего устройства для волос на части тела субъекта.
В этих вариантах осуществления, часть тела субъекта может представлять собой голову субъекта, и этап определения длины волос может содержать определение меньшей длины волос для волос субъекта, если определяется, что подстригающее устройство для волос находится на боковой части головы, чем длина волос, если определяется, что подстригающее устройство для волос находится на верхней части головы.
В этих вариантах осуществления, часть тела субъекта может представлять собой голову субъекта, и этап определения длины волос может содержать определение первой длины волос для волос субъекта, когда определяется, что подстригающее устройство для волос находится рядом или на линии роста волос на боковых частях или задней части головы субъекта, и второй длины волос для волос, когда определяется, что подстригающее устройство для волос находится на удалении от линии роста волос на боковых частях или задней части головы, причем первая длина волос меньше второй длины волос.
В соответствии с третьим аспектом, предложен компьютерный программный продукт, содержащий машиночитаемый носитель, имеющий машиночитаемый код, встроенный в него, при этом машиночитаемый код выполнен таким образом, что, при выполнении подходящим компьютером или процессором, компьютер или процессор побуждается выполнять любой из способов, описанных выше.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения теперь будут описаны только в качестве примера со ссылкой на сопровождающие чертежи, на которых:
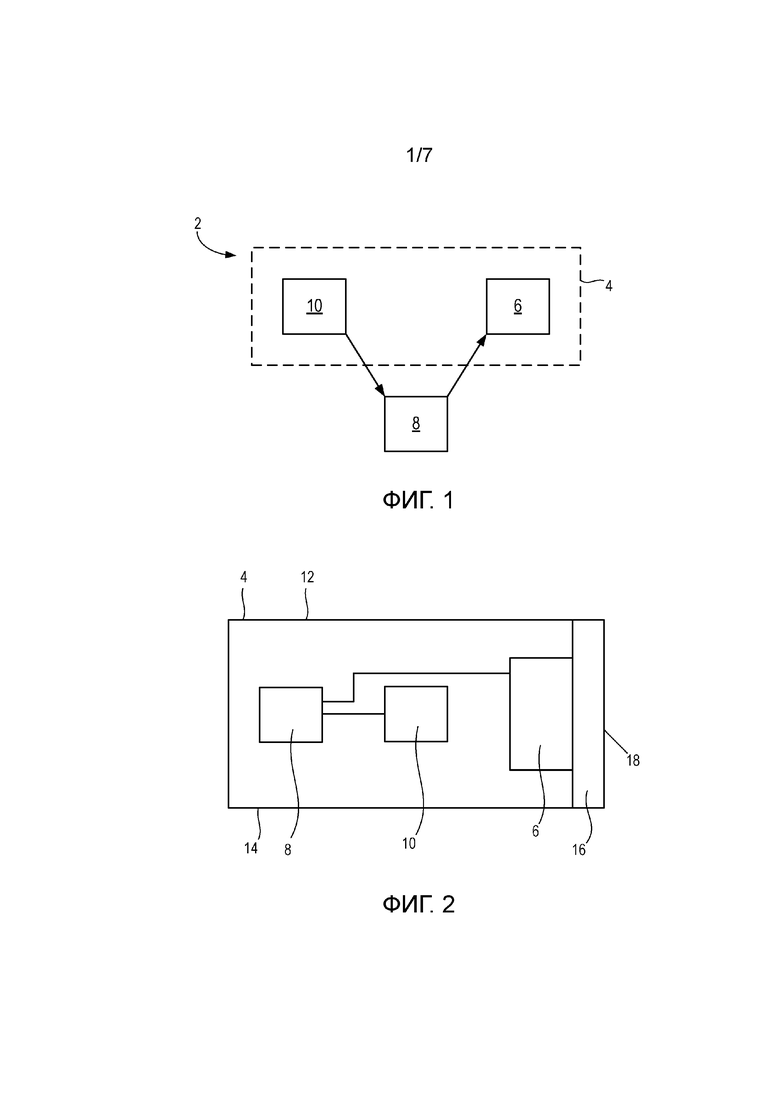
Фиг.1 представляет собой блок-схему системы в соответствии с вариантом осуществления;
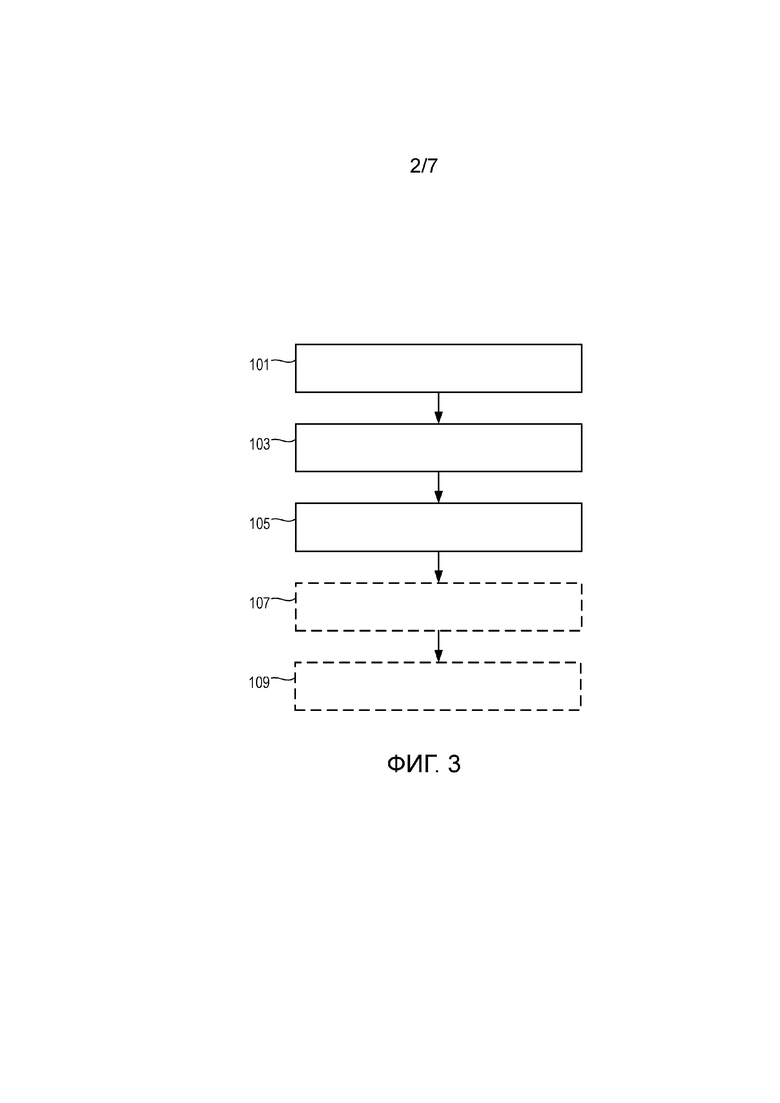
фиг.2 представляет собой схематичное изображение ручного подстригающего устройства в соответствии с вариантом осуществления;
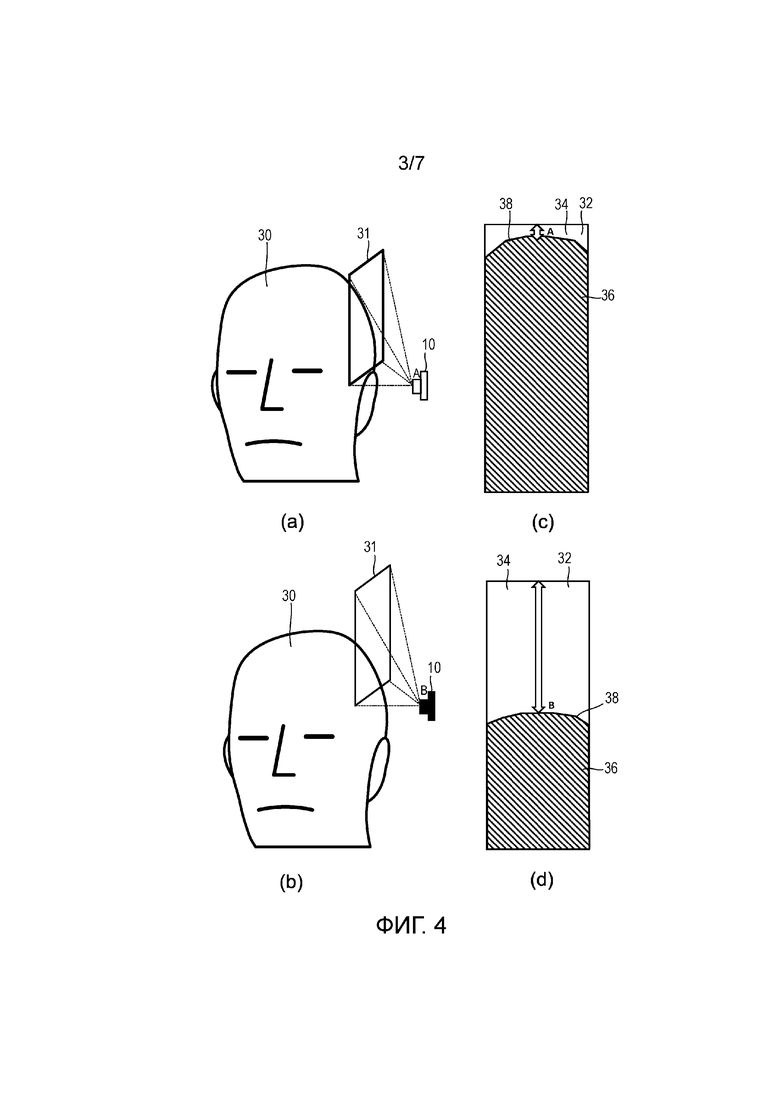
фиг.3 представляет собой блок-схему, иллюстрирующую способ в соответствии с вариантом осуществления изобретения;
на фиг.4 показано устройство во время использования на субъекте и соответствующие изображения, полученные формирующей изображение конструкцией в первом и втором положениях на субъекте;
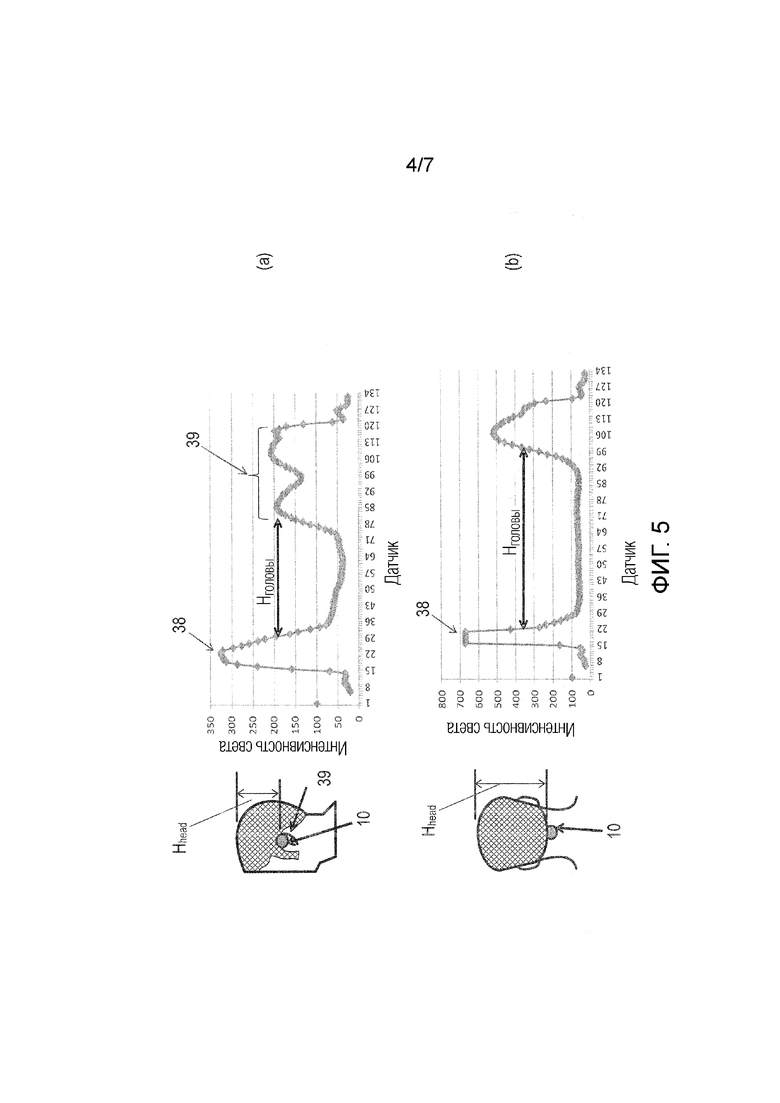
на фиг.5 показаны данные изображения, полученные формирующей изображение конструкцией в разных положениях в соответствии с другим вариантом осуществления;
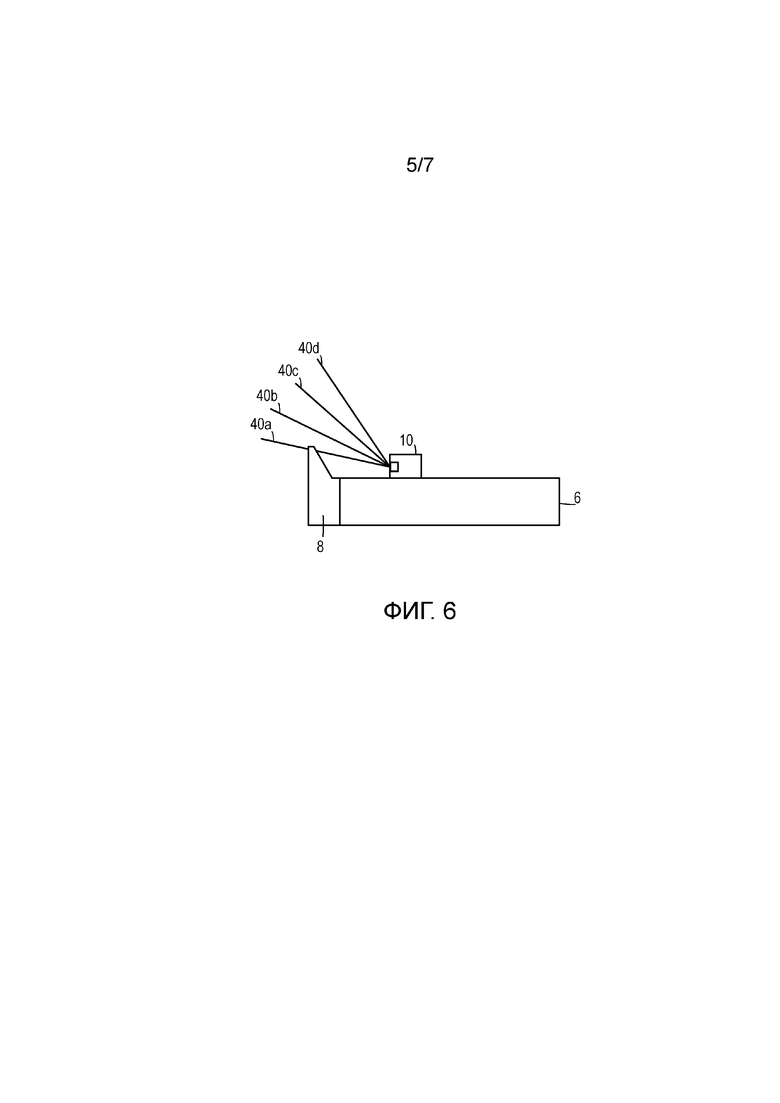
фиг.6 представляет собой схематичное изображение ручного подстригающего устройства в соответствии с вариантом осуществления;
на фиг.7 показано подстригающее устройство в четырех разных положениях относительно головы субъекта; и
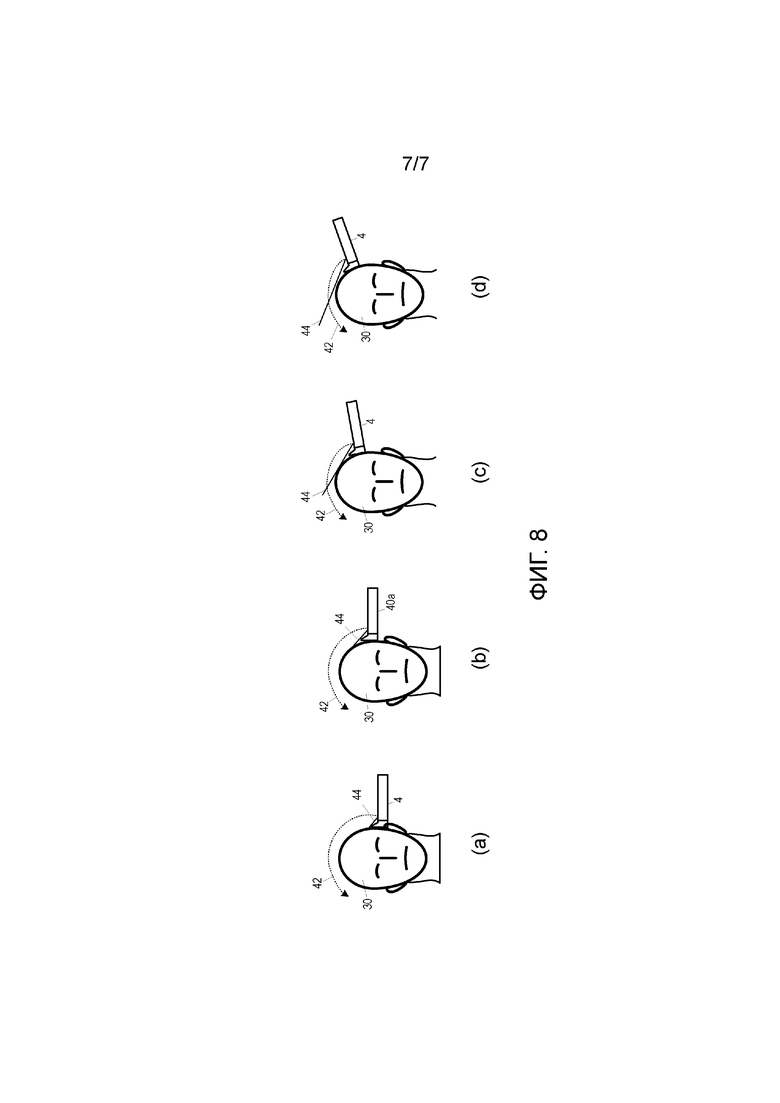
на фиг.8 показано подстригающее устройство в соответствии с альтернативным вариантом осуществления в четырех разных положениях относительно головы субъекта.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Как описано выше, является желательным обеспечить автоматизированные системы для стрижки волос или выполнения другого типа обработки тела, которые являются способными определять свое положение относительно части тела, подлежащей обработке, не требуя использования позиционирующей конструкции или другой отдельной части устройства, которую нужно носить на себе, перемещать или иным образом располагать на субъекте.
Настоящее изобретение, следовательно, обеспечивает технологию, которая позволяет устройству, которое используется в непосредственной близости к или в контакте с частью тела, подлежащей обработке, определять свое положение относительно части тела субъекта, просто используя формирующую изображение конструкцию на устройстве. В частности, данные изображения получаются, используя формирующую изображение конструкцию, и эти данные изображения анализируются для определения граничного участка между частью тела субъекта и окружающим пространством вокруг части тела. Положение граничного участка в данных изображения будет варьироваться на основании положения устройства относительно части тела, и, таким образом, положение граничного участка может иметь отношение к положению устройства относительно части тела.
Например, там, где данные изображения представляют собой инфракрасное (ИК) изображение, полученное, используя ИК камеру, или другие данные изображения, обозначающие перепад температур, данные изображения могут анализироваться для определения "теплых" частей данных изображения, соответствующих части тела субъекта, и "холодных" частей данных изображения, соответствующих окружающему пространству вокруг субъекта. Положение граничного участка между этими теплыми и холодными частями в данных изображения может использоваться для определения положения устройства относительно части тела субъекта. В альтернативных вариантах осуществления данные изображения могут быть очень "грубыми" (т.е., содержащими очень мало "пикселей"), которые могут быть получены, используя один или более датчиков дальности или датчиков близости, которые измеряют расстояние до ближайшего объекта во множестве предварительно заданных направлениях от датчика. Данные изображения могут анализироваться для определения близких частей данных изображения, соответствующих части тела субъекта, и удаленных частей данных изображения, соответствующих окружающему пространству вокруг субъекта. Положение граничного участка между близкими и удаленными частями в данных изображения может использоваться для определения положения устройства относительно части тела субъекта. Вышеприведенные варианты осуществления описаны более подробно ниже со ссылкой на фиг.4-8.
На фиг.1 показана система 2 для обработки части тела, подлежащей обработке, в соответствии с общим вариантом осуществления изобретения. Система 2 содержит ручное обрабатывающее устройство 4, которое может удерживаться пользователем и использоваться на части тела субъекта. Субъектом может быть человек, который использует и управляет устройством 4 (т.е. пользователь использует устройство 4 на самом себе), или субъектом может быть другой человек относительно пользователя устройства 4. В вариантах осуществления, описанных ниже, предполагается, что пользователем системы 2/обрабатывающего устройства 4 является обрабатываемый человек (т.е. пользователь использует систему 2 для обработки самого себя).
Обрабатывающее устройство 4 включает в себя обрабатывающий узел 6, который выполняет обрабатывающее действие на части тела, подлежащей обработке. В предпочтительных вариантах осуществления, обрабатывающее действие представляет собой стрижку волос на части тела (например, волос на голове, лице, груди, ногах и т.д. пользователя), в случае чего обрабатывающий узел 6 представляет собой подстригающий узел. В наиболее предпочтительных вариантах осуществления, часть тела представляет собой голову, и обрабатывающее действие представляет собой стрижку волос. В альтернативных вариантах осуществления, обрабатывающее действие представляет собой массаж части тела, в случае чего обрабатывающий узел 6 может содержать один или более составных элементов для прикладывания давления к и/или манипулирования частью тела. В других альтернативных вариантах осуществления, обрабатывающее действие представляет собой нанесение татуировки на часть тела, в случае чего обрабатывающий узел 6 может содержать один или более составных элементов (например, игл) для нанесения чернил на или в кожу части тела. Специалистам в данной области будут известны другие типы обрабатывающего действия и обрабатывающих узлов, которые могут использоваться в системе 2 в соответствии с изобретением.
Система 2 также включает в себя контроллер 8, который выполнен с возможностью осуществления способа в соответствии с изобретением и, в некоторых вариантах осуществления, управления работой обрабатывающего устройства 4 в соответствии с изобретением. В некоторых вариантах осуществления, контроллер 8 представляет собой часть обрабатывающего устройства 4, но в других вариантах осуществления контроллер 8 находится в другой части системы 2 относительно обрабатывающего устройства 4. Например, система 2 может содержать базовый узел (например, установочную и/или зарядную станцию для обрабатывающего устройства 4), и контроллер 8 может представлять собой часть этого базового узла. В вариантах осуществления, где контроллер 8 находится в отдельной части системы 2 относительно обрабатывающего устройства 4, обрабатывающее устройство 4 может содержать соответствующий контроллер и/или другие схемы (например, трансиверные схемы), которые могут быть выполнены с возможностью обмена сигналами управления и/или другой информацией или данными (например, данными изображения) с контроллером 8 и управления работой обрабатывающего устройства 4, соответственно. Контроллер 8 может представлять собой любой подходящий тип электронного составного элемента, например процессор, узел управления, процессорный узел, многоядерный процессор и т.д. Хотя не показано на фиг.1, контроллер 8 может иметь связанный запоминающий узел, который может использоваться для хранения программного кода, который может выполняться контроллером 8 для осуществления способа, описанного здесь.
Обрабатывающее устройство 4 также содержит формирующую изображение конструкцию 10, которая расположена в или на обрабатывающем устройстве 4 и которая предназначена для получения данных изображения. Формирующая изображение конструкция 10 размещена на обрабатывающем устройстве 4 таким образом, что она может получать данные изображения, соответствующие области вокруг обрабатывающего узла 6, например, включая часть тела субъекта, которая обрабатывается, а также окружающее пространство вокруг обрабатывающего устройства 4, когда используется обрабатывающее устройство 4.
Формирующая изображение конструкция 10 может представлять собой любой подходящий тип устройства или составного элемента, который обеспечивает возможность определения контраста между частью тела субъекта, подлежащей обработке, и окружающим пространством вокруг субъекта. Как отмечено выше, технология определения положения в соответствии с изобретением использует этот контраст для определения положения граничного участка между субъектом и окружающим пространством в данных изображения, и положение граничного участка используется для определения положения обрабатывающего устройства 4.
В некоторых вариантах осуществления, формирующая изображение конструкция 10 может содержать инфракрасный (ИК) датчик (или группу ИК датчиков), или ИК камеру, термодатчик (или группу термодатчиков), датчик видимого света (или группу датчиков) или камеру, один или более датчиков близости, которые обеспечивают возможность определения близости к объекту в одном или более направлениях от обрабатывающего устройства 4, или один или более датчиков расстояния, которые обеспечивают возможность измерения или определения расстояния до ближайшего объекта в одном или более направлениях от обрабатывающего устройства 4. Датчик(и) близости и/или датчик(и) расстояния могут быть основаны на любой подходящей технологии, например измерения расстояния по времени пролета, используя свет (например, лазерный свет) или звук (например, ультразвук), или близость на основе ультразвука, инфракрасного излучения, температуры/тепла, лазерного света и т.д. Специалистам в данной области будут понятно, что другие типы формирующих изображение конструкций 10 относительно описанных могут использоваться в альтернативных вариантах осуществления изобретения.
В остальной части настоящего подробного описания изобретение будет описываться со ссылкой на систему 2, содержащую подстригающее устройство 4, которое предназначено для стрижки или бритья волос. Однако, специалистам в данной области будет понятно, что идея вариантов осуществления в дальнейшем описании, и в частности технологии для определения положения подстригающего устройства 4 на теле субъекта, являются легко применимыми к системам для выполнения других типов обработки на части тела, например нанесение татуировки на кожу, массаж кожи и т.д.
Таким образом, на фиг.2 показана подстригающая система 2 для волос, которая содержит ручное подстригающее устройство 4 для волос. В этом иллюстративном варианте осуществления, контроллер 8 представляет собой часть подстригающего устройства 4. Как отмечено выше, подстригающее устройство 4 также содержит подстригающий узел 6 и формирующую изображение конструкцию 10. При использовании подстригающее устройство 4 перемещается по коже части тела субъекта, например его головы, для стрижки, подрезки или бритья волос на этой части тела.
Контроллер 8 получает данные изображения от формирующей изображение конструкции 10 во время использования подстригающего устройства 4 и управляет работой подстригающего узла 6 (например, управляя действием стрижки и/или управляя длиной стрижки подстригающего узла 6). В настоящем варианте осуществления, контроллер 8, формирующая изображение конструкция 10 и подстригающий узел 6 взаимодействуют через посредство проводного соединения, но предполагаются альтернативные конструкции. Например, контроллер 8, формирующая изображение конструкция 10 и подстригающий узел 6 могут соединяться посредством беспроводного соединения (и следует понимать, что беспроводное соединение может использоваться в вариантах осуществления, где контроллер 8 не является частью подстригающего устройства 4). Беспроводные модули (не показаны на фиг.2), например, радио- или инфракрасные передатчики и приемники, работают для беспроводного соединения разных составных элементов системы 2. Подходящие беспроводные технологии включают Bluetooth, Zigbee, Wi-Fi и т.д. Контроллер 8 также может быть способен соединяться беспроводным образом с другими устройствами или составными элементами снаружи системы 2.
Формирующая изображение конструкция 10 выполнена в подстригающем устройстве 4 для получения данных изображения для по меньшей мере области спереди подстригающего устройства 4, т.е. от формирующей изображение конструкции 10 по направлению к и за подстригающим узлом 6, таким образом, при использовании, данные изображения от формирующей изображение конструкции 10 будут включать данные изображения, относящиеся к части тела, подлежащей обработке/обрабатываемой, и/или окружающему пространству вокруг части тела, подлежащей обработке/обрабатываемой.
Подстригающее устройство 4 содержит основной корпус 12 с подстригающим узлом 8 на одном конце основного корпуса 12. Основной корпус 12 задает рукояточный участок 14. Корпус 12 и подстригающий узел 6 размещены таким образом, что рукояточный участок 14 способен удерживаться пользователем.
Подстригающий узел 6 выполнен с возможностью подрезки или стрижки волос и может содержать любой подходящий механизм для стрижки волос. Например, подстригающий узел 6 может содержать подстригающий механизм, который имеет неподвижный обрабатывающий элемент (например, неподвижное режущее лезвие) и подвижный обрабатывающий элемент (например, подвижное режущее лезвие), который перемещается посредством привода или исполнительного механизма (например, электродвигателя), который перемещает подвижный обрабатывающий элемент относительно неподвижного обрабатывающего элемента. Волосы выступают за неподвижный обрабатывающий элемент и подстригаются посредством срезывающего действия вследствие перемещения подвижного обрабатывающего элемента. В качестве другого примера, подстригающий узел 6 может содержать сетку, через которую выступают волосы, и подвижное лезвие перемещается по сетке для подстригания выступающих волос.
В этом иллюстративном варианте осуществления, подстригающее устройство 4 имеет направляющую 16, которая имеет направляющую поверхность 18. Направляющая поверхность 18 образует концевую поверхность. При использовании направляющая поверхность 18 располагается на части тела, на которой необходимо постричь волосы. Направляющая поверхность 18 удалена от подстригающего узла 6. Однако, в некоторых вариантах осуществления, подстригающий узел 6 и/или направляющая 16 могут быть регулируемыми таким образом, что направляющая поверхность 16 и подстригающий узел 6 лежат планарно относительно друг друга. Направляющая поверхность 18 выполнена с возможностью дистанционирования подстригающего узла 6 от части тела, на которой волосы подлежат стрижке, например, кожи головы субъекта, для управления длиной волос, которая остается после стрижки. В другом варианте осуществления, направляющая 16 может быть опущена.
В некоторых вариантах осуществления, направляющая 16 представляет собой гребенку. Направляющая 16 имеет множество параллельных, но расположенных на расстоянии друг от друга, зубьев гребенки (не показано на фиг.2). Расположенные на расстоянии друг от друга зубья гребенки обеспечивают возможность прохода волос между ними, таким образом волосы подвергаются воздействию подстригающего узла 6 и подстригаются посредством подстригающего узла 6. Дистальная поверхность каждого зуба от основного корпуса 12 образует направляющую поверхность 18. Направляющая 16 может монтироваться на основной корпус 12 или на подстригающий узел 6. Направляющая 16 может съемно монтироваться на основной корпус 12. Направляющая 16 может быть взаимозаменяемой с другой направляющей и/или заменяться для регулирования длины волос, которая остается после стрижки.
В некоторых вариантах осуществления, длина подстригания подстригающего узла 6 может автоматически регулироваться в соответствии с сигналом управления от контроллера 8. Например, расстояние между подстригающим узлом 6 и направляющей поверхностью 18 может регулироваться для выполнения изменения длины подстригания. Специалистам в данной области будут известны различные типы подстригающего узла 6/подстригающего устройства 4, в котором длиной подстригания можно автоматически управлять.
Следует понимать, что составные элементы и признаки системы 2, показанной на фиг.1 и 2, не являются исчерпывающими, и фактические воплощения системы 2 будут включать в себя дополнительные составные элементы и признаки относительно показанных и описанных выше. Например, подстригающее устройство 4 может включать в себя источник питания, такой как батарея, или средство для соединения подстригающего устройства 4 с источником питания. В качестве альтернативы или дополнительно, подстригающее устройство 4 или другая часть системы 2 может содержать одну или более кнопок, элементов управления или другие элементы пользовательского интерфейса для обеспечения возможности пользователю управления работой системы 2.
На фиг.3 показана блок-схема способа определения положения подстригающего устройства 4 в соответствии с изобретением. Как отмечено выше, хотя способ описывается со ссылкой на подстригающее устройство 4, следует понимать, что способ является применимым к любому типу обрабатывающего устройства 4. Также, как отмечено выше, программный код для обеспечения возможности выполнения контроллером 8 этого способа может храниться в запоминающем узле, связанном с контроллером 8.
Способ на фиг.3 также описывается со ссылкой на фиг.4, на которой показан общий принцип, используемый настоящим изобретением. На фиг.4 показана формирующая изображение конструкция 10 для подстригающего устройства 4 в двух разных положениях относительно головы субъекта 30, когда подстригающее устройство 4 контактирует с головой субъекта 30. На фиг.4(a) показана формирующая изображение конструкция 10 в положении A, в котором формирующая изображение конструкция 10 находится приблизительно на одном уровне с частью уха субъекта 30, и на фиг.4(b) показана формирующая изображение конструкция 10 в положении B, в котором формирующая изображение конструкция 10 находится выше уха субъекта 30. Для упрощения иллюстрации, подстригающее устройство 4 не показано на фиг.4.
На этапе 101, данные изображения получаются посредством формирующей изображение конструкции 10. Как отмечено выше, данные изображения будут относиться к площади или области 31 спереди подстригающего устройства (т.е. в направлении субъекта). Тип полученных данных изображения будет зависеть от типа формирующей изображение конструкции 10 в или на подстригающем устройстве 4, как описано более подробно ниже. Этап 101 может содержать управление формирующей изображение конструкцией 10 для получения данных изображения, получение данных изображения от формирующей изображение конструкции 10 через посредство проводного или беспроводного соединения, или извлечение ранее полученных данных изображения из запоминающего узла.
Графическое представление 32 данных изображения (например, изображения, полученного из данных 32 изображения), полученных в положении A, показано на фиг.4(c), и графическое представление 32 данных изображения, полученных в положении B, показано на фиг.4(d).
Контроллер 8 получает данные изображения, и на этапе 103, контроллер 8 анализирует данные изображения для определения граничного участка между частью тела субъекта и окружающим пространством вокруг части тела. В частности, контроллер 8 определяет граничный участок на основании контраста в данных изображения между частью тела субъекта, подлежащей обработке, и окружающим пространством вокруг субъекта.
Таким образом, на этапе 103, контроллер 8 определяет контрастные участки 34, 36 данных изображения, и в частности определяет участок 34 в качестве окружающего пространства вокруг части тела субъекта 30, и участок 36 в качестве части тела субъекта 30. Контроллер 8 определяет граничный участок в виде линии 38, проходящей между этими участками 34, 36. Можно видеть, что линия 38 в общем смысле соответствует контуру головы субъекта 30 в данных 32 изображения.
Далее, на этапе 105, контроллер 8 определяет положение подстригающего устройства 4 для волос относительно части тела, подлежащей обработке/обрабатываемой, на основании положения граничного участка в данных изображения. В частности, положение граничного участка в данных изображения будет варьироваться на основании положения подстригающего устройства 4 относительно части тела, и, таким образом, положение граничного участка может иметь отношение к положению подстригающего устройства 4 относительно части тела.
Таким образом, в положении A, на фиг.4(c) можно увидеть, что голова субъекта 30 почти полностью заполняет вид формирующей изображение конструкции 10, и граничный участок 38 находится гораздо ближе к верхней части графического представления 32 данных изображения, чем граничный участок 38 на фиг.4(d), где голова субъекта 30 не настолько заполняет вид формирующей изображение конструкции 10. Эта разница имеет место вследствие разных высот формирующей изображение конструкции 10 относительно головы субъекта 30. Расстояние граничного участка 38 от верхней части изображения 32 (или от нижней части изображения 32, в зависимости от того, какая является предпочтительной) может использоваться для определения высоты подстригающего устройства 4 относительно головы субъекта 30. Следует понимать, что высота подстригающего устройства 4 относительно головы субъекта 30 может задаваться с точки зрения вертикального расстояния подстригающего устройства 4 от верхней части головы.
В некоторых вариантах осуществления, этап 105 может включать использование справочной таблицы, которая сопоставляет расстояния от граничного участка 38 до верхнего или нижнего края изображения 32 с положениями (например, вертикальной высотой) подстригающего устройства 4 относительно головы. Данные в справочной таблице могут предварительно задаваться, или они могут определяться посредством процедуры калибровки, в которой подстригающее устройство 4 перемещается между разными положениями на голове субъекта 30, при этом данные 32 изображения получаются и анализируются в каждом положении для определения, где граничный участок 38 располагается в этом положении.
Как отмечено выше, в некоторых вариантах осуществления, формирующая изображение конструкция 10 может содержать датчик температуры, термический или инфракрасный (ИК) датчик или группу датчиков (например, ИК камеру), и контраст между субъектом и окружающим пространством может определяться на основании тепла, излучаемого субъектом, относительно тепла, излучаемого окружающей средой. В примере, показанном на фиг.4, участок 36 субъекта может определяться в качестве более теплых или самых теплых частей данных 32 изображения, и участок 34 окружающего пространства может определяться в качестве холодных или более холодных частей данных 32 изображения. Технологии для анализа ИК данных изображения для определения граничного участка 38 между более теплыми и более холодными частями данных 32 изображения будут известны специалистам в данной области.
В альтернативных вариантах осуществления, формирующая изображение конструкция 10 может содержать датчик видимого света (или группу датчиков) или камеру, которая получает изображения на основании видимого света, и контраст может определяться на основании цвета и/или формы субъекта относительно окружающей среды. В примере, показанном на фиг.4, участок 36 субъекта может определяться на основании области одинакового или аналогичного цвета (т.е. цвета волос) по сравнению с цветом(ами) остальной части данных 32 изображения, которая определялась бы в качестве участка 34 окружающего пространства. В качестве альтернативы (или дополнительно), формы в данных изображения могут определяться, и граничный участок 38 может определяться на основании этих форм.
Как описано ниже, наряду с определением вертикального положения или высоты подстригающего устройства 4 относительно головы субъекта 30, может быть возможным использовать положение граничного участка 38 и/или других признаков данных 32 изображения для определения горизонтального или латерального положения подстригающего устройства 4 на головке субъекта. Например, может быть возможным определять, находится ли подстригающее устройство 4 на боковой части (т.е. слева или справа), или на задней части головы субъекта. В частности, в зависимости от типа формирующей изображение конструкции 10, используемой в подстригающем устройстве 4, может быть возможным определять ухо субъекта в данных изображения (например, посредством контраста между волосами и ухом, например, в температуре, внешнем виде, интенсивности света, форме и т.д.), и положение уха в данных 32 изображения может использоваться для определения горизонтального или латерального положения подстригающего устройства 4. Подобным образом, может быть возможным определять другие лицевые признаки (например, глаза, нос, рот, лоб и т.д.) в данных изображения, или другие признаки тела, и использовать положение этих признаков для определения горизонтального или латерального положения подстригающего устройства 4. Также следует понимать, что положение уха (или другого признака) в изображении или данных 32 изображения может использоваться в комбинации с положением граничного участка 38 для определения вертикального положения или высоты подстригающего устройства 4 относительно головы субъекта 30.
На фиг.5 показано, как группа датчиков видимого света может использоваться для определения вертикального или горизонтального положений подстригающего устройства 4 в соответствии с вариантом осуществления. На фиг.5(a) показана формирующая изображение конструкция 10 в форме датчика-видеокамеры со 128 световыми датчиками, размещенными в линию для образования массива 1×128, который размещен на боковой части головы субъекта 30, приблизительно, на высоте уха 39 субъекта. Каждый из световых датчиков измеряет интенсивность или яркость падающего света. График на фиг.5(a) представляет собой кривую значений интенсивности света для каждого из 128 датчиков в массиве. Датчики с более низкими номерами соответствуют датчикам в верхней части массива (и, таким образом, формируют изображение верхней части головы), и датчики с более высокими номерами соответствуют датчикам в нижней части массива (и, таким образом, формируют изображение нижней части головы и уха). На фиг.5(a) можно увидеть, что граничный участок 38 может определяться там, где яркость или интенсивность падающего света становится существенно больше, чем у соседней части данных изображения (т.е., где имеется контраст в данных 32 изображения), и ухо 39 может определяться вследствие перепада интенсивности света от уха 39 по сравнению со светом от головы (и перепада интенсивности света от формы уха). Расстояние Hголовы представляет собой высоту или расстояние волос на голове (т.е. расстояние от верхней части уха до верхней части головы). Таким образом, из этих данных интенсивности света, так как ухо является определяемым в данных 32 изображения, является возможным определять, что подстригающее устройство 4 находится на боковой части головы субъекта 30. В некоторых вариантах осуществления, вертикальное положение уха может рассматриваться вместе с положением граничного участка 38 для определения вертикального положения подстригающего устройства 4 на голове субъекта 30.
На фиг.5(b) показана та же формирующая изображение конструкция 10, размещенная на задней части головы на линии роста волос субъекта 30. График на фиг.5(b) представляет собой кривую значений интенсивности света для каждого из 128 датчиков в массиве (также датчики с более низкими номерами формируют изображение верхнего участка головы, и датчики с более высокими номерами формируют изображение нижнего участка головы). На фиг.5(b) можно увидеть, что граничный участок 38 может определяться там, где яркость или интенсивность падающего света становится существенно больше, чем у соседней части данных изображения (т.е. данных изображения, соответствующих волосам на голове), и горло может определяться вследствие увеличения интенсивности света от кожи горла. Расстояние Hголовы в этом случае представляет собой высоту или расстояние волос на голове (т.е. расстояние от линии роста волос до верхней части головы). Анализ профиля интенсивности света будет показывать, что ухо не является видимым на данных 32 изображения (например, как это на фиг.5(a)). Таким образом, из этого профиля интенсивности света, так как ухо не является определяемым, является возможным определить, что подстригающее устройство 4 находится на задней части головы субъекта 30.
Следует понимать, что аналогичные, показанным на фиг.5, профили могут достигаться, используя группу инфракрасных датчиков.
В других вариантах осуществления, контраст, и, следовательно, граничный участок 38, может определяться на основании измерений расстояния до ближайшего объекта (или близости к объекту) в одном или более известных направлениях. Датчик(и) близости и/или датчик(и) расстояния могут быть основаны на любой подходящей технологии, например измерения расстояния по времени пролета, используя свет (например, лазерный свет) или звук (например, ультразвук), или близость на основе ультразвука, инфракрасного излучения, температуры/тепла, лазерного света и т.д. Варианты осуществления на основе расстояния/близости описаны более подробно со ссылкой на фиг.6, 7 и 8.
В частности, на фиг.6 показан вид сбоку ручного подстригающего устройства 4, которое содержит формирующую изображение конструкцию 10, которая измеряет расстояние или близость во множестве направлений. На фиг.6 показаны четыре "направления" измерения, под разными углами относительно друг друга, которые обозначены 40a, 40b, 40c и 40d. Следовательно, формирующая изображение конструкция 10 измеряет расстояние до ближайшего объекта в каждом из направлений 40a-40d. В дальнейшем рассмотрении, предполагается, что направления 40a-40d отличаются только их углом относительно горизонтальной плоскости, что позволяет контроллеру 8 определять вертикальное положение или высоту подстригающего устройства 4, но следует понимать, что в некоторых вариантах осуществления основанная на расстоянии или близости формирующая изображение конструкция 10 также может измерять расстояния в направлениях, которые отклоняются от вертикальной плоскости, для обеспечения возможности определения контроллером 8 горизонтального или латерального положения подстригающего устройства 4 относительно головы субъекта 30.
На фиг.7 показано подстригающее устройство в четырех разных положениях относительно головы субъекта 30. В частности, от фиг.7(a) к 7(d) подстригающее устройство 4 перемещается вверх по боковой части и по верхней части головы вдоль пути 42. Когда подстригающее устройство 4 перемещается по голове, расстояния, измеренные в некоторых или во всех направлениях измерения, будут изменяться, и в частности, в соответствии с кривизной головы, когда устройство 4 перемещается вверх по боковой части головы, измеренное расстояние в некоторых из направлений может существенно изменяться.
Например, на фиг.7(a) расстояние, измеренное в направлениях 40a, 40b и 40c, является относительно небольшим, например, несколько сантиметров, так как расстояние представляет собой расстояние от формирующей изображение конструкции 10 до головы субъекта 30 (с которой подстригающее устройство 4 находится в контакте), тогда как расстояние, измеренное в направлении 40d, будет гораздо больше, так как оно будет представлять собой расстояние от формирующей изображение конструкции 10 до части окружающего пространства вокруг субъекта 30. В противоположность, на фиг.7(b) подстригающее устройство 4 находится выше на боковой части головы, чем на фиг.7(a), и, следовательно, вследствие кривизны головы на этой высоте, только расстояние, измеренное в направлениях 40a и 40b, будет достаточно небольшим, и расстояние, измеренное в направлении 40c и 40d, будет гораздо больше. В положениях, показанных на фиг.7(c) и (d), только расстояние, измеренное в направлении 40a, будет относительно небольшим вследствие кривизны головы.
Расстояния, измеренные в каждом направлении, образуют данные изображения (например, при этом каждое измеренное расстояние рассматривается в качестве "пикселя" изображения), и контроллер 8 анализирует данные изображения для определения того, какое направление или направления обозначают близкий объект (т.е. голову субъекта), а какое направление или направления обозначают удаленный объект (т.е. окружающее пространство), и определяется, что граничный участок 38 находится между соседними направлениями, где имеет место большое изменение измеренного расстояния (например, где разница между измерением расстояния больше, чем, например, 10 сантиметров).
Таким образом, в положении, показанном на фиг.7(a), будет определяться, что граничный участок 38 находится между направлениями 40c и 40d, тогда как в положении, показанном на фиг.7(b), будет определяться, что граничный участок 38 находится между направлениями 40b и 40c, и в положении, показанном на фиг.7(c), будет определяться, что граничный участок 38 находится между направлениями 40a и 40b. На основании положения граничного участка 38, контроллер 8 может определять положение подстригающего устройства 4 на голове субъекта 30.
Как и в случае ИК вариантов осуществления и вариантов осуществления видимого света выше, этап 105 может включать использование справочной таблицы, которая сопоставляет направления, между которыми находится граничный участок 38, с положением (например, вертикальной высотой) подстригающего устройства 4 относительно головы. Как и ранее, данные в справочной таблице могут предварительно задаваться, или они могут определяться посредством процедуры калибровки, в которой подстригающее устройство 4 перемещается между разными положениями на голове субъекта 30, при этом данные 32 изображения получаются и анализируются в каждом положении для определения, где граничный участок 38 располагается в этом положении.
Следует понимать, что использование четырех направлений измерения, как показано на фиг.7, является только иллюстративным, и может использоваться больше или меньше направлений. Использование больше направлений измерения может быть предпочтительным, так как это будет повышать разрешение идентификации граничного участка, и, таким образом, повышать точность определения положения.
На фиг.8 показан простой вариант осуществления, в котором формирующая изображение конструкция 10 измеряет расстояние в одном направлении 44. На фиг.8, подстригающее устройство 4 показано в четырех разных положениях, когда оно перемещается от боковой части головы субъекта 30 к верхней части головы вдоль пути 42. Можно увидеть, что в положениях, показанных на фиг.8(a) и (b), расстояние, измеренное в направлении 44, будет небольшим (так как расстояние представляет собой расстояние от формирующей изображение конструкции 10 до головы), но в положениях, показанных на фиг.8(c) и (d), расстояние, измеренное в направлении 44, будет гораздо больше, так как оно представляет собой измерение расстояния до окружающего пространства (вследствие кривизны головы в этих положениях подстригающего устройства 4. Таким образом, хотя этот вариант осуществления необязательно обеспечивает возможность точного определения положения подстригающего устройства 4, по-прежнему является возможным определять, находится ли подстригающее устройство 4 на боковой части головы (например, как на фиг.8(a) и (b)), или нет (например, как на фиг.8(c) и (d)).
Анализ данных изображения в вариантах осуществления, в которых формирующая изображение конструкция 10 представляет собой датчик близости, который измеряет, находится ли объект рядом с датчиком в одном или более направлениях измерения, является аналогичным описанному выше для датчиков расстояния или дальности, за исключением того, что граничный участок 38 определяется находящимся между соседними направлениями измерения, где имеется изменение от определения близкого объекта до его отсутствия. Например, на фиг.7(a), датчик близости будет определять близкий объект в направлениях 40a, 40b и 40c измерения, но не в 40d. Таким образом, граничный участок 38 будет определяться находящимся между направлениями 40c и 40d измерения.
Следует понимать, что формирующая изображение конструкция 10 может комбинировать множество типов датчиков для повышения точности определения положения. Например, формирующая изображение конструкция 10 может содержать два или более ИК датчика, датчика видимого света, датчика расстояния и датчика близости.
В конкретном воплощении изобретения, подстригающая система 2 для волос предназначена для автоматической стрижки волос в соответствии с требуемым стилем, и контроллер 8 использует положение, определенное, используя технологию определения положения, описанную выше, для определения длины подстригания для подстригающего узла 6 в этом положении на голове субъекта и/или для определения необходимости активации или деактивации действия стрижки подстригающего узла 6.
Например, требуемый стиль прически (или часть требуемого стиля прически) может включать "плавное уменьшение" вокруг ушей и в области горла (т.е. вокруг линии роста волос субъекта), в которой длина волос постепенно уменьшается до 0. В настоящее время, пользователю подстригающего устройства для волос требуется вручную менять размер гребенки на подстригающем устройстве для волос для изменения длины стрижки или иным образом вручную изменять длину стрижки подстригающего узла для изменения длины волос, остающихся после прохода подстригающего узла 6 по волосам. Изобретение, когда используется в подстригающем устройстве 4, в котором длина стрижки подстригающего узла 6 может автоматически управляться, позволяет подстригающему устройству 4 определять свое положение на голове субъекта и создавать стиль прически с варьируемыми длинами, например, стиль, который включает "плавное уменьшение", автоматически.
Таким образом, ссылаясь снова на способ на фиг.3, после этапа 105, на котором определяется положение подстригающего устройства 4, контроллер определяет длину волос для волос субъекта в определенном положении подстригающего устройства для волос (этап 107).
Контроллер 8 затем выдает сигнал управления на подстригающий узел 6 для настройки подстригающего узла для стрижки волос до определенной длины волос (этап 109).
В качестве альтернативы, или дополнительно, на этапе 107 контроллер может определять необходимость выполнения какого-либо подстригания волос в определенном положении подстригающего устройства 4 для волос, и выдать сигнал управления на подстригающий узел 6 для обеспечения или деактивации действия подстригания, как требуется.
В некоторых вариантах осуществления, пользователь системы 2 может выбирать предварительно заданный стиль прически до использования. Предварительно заданный стиль прически может содержать предварительно заданную модель, которая определяет длины волос в разных положениях на голове субъекта, требуемые для создания требуемого стиля прически (и/или необходимость какого-либо действия подстригания в разных положениях на голове субъекта). Таким образом, на этапе 105, контроллер 8 может определять длину волос/действие подстригания волос для текущего положения из предварительно заданной модели для требуемого стиля прически.
В вариантах осуществления, где подстригающее устройство 4 предназначено для создания "плавного уменьшения" вокруг линии роста волос субъекта, контроллер 8 может управлять подстригающим узлом 6 для стрижки волос до более короткой (первой) длины, когда определяется, что подстригающее устройство 4 для волос находится рядом (т.е. в пределах порогового расстояния) или на боковых частях и/или на задней части головы (или, в частности, нижней части боковых частей и/или задней части головы), чем, когда определяется, что подстригающее устройство 4 для волос находится на верхней части головы, где, например, волосы могут подстригаться до второй (большей) длины или действие подстригания совсем деактивируется.
Следует понимать, что эти варианты осуществления не ограничены только на двух длинах волос, и является возможным создавать постепенное "плавное уменьшение" посредством настройки подстригающего узла 6 на стрижку волос до значительно больших длин, когда подстригающее устройство 4 перемещается от линии роста волос на боковых частях и/или задней части головы.
Следует понимать, что управление активацией и деактивацией подстригающего узла 6 на основании определенного положения не ограничено на подстригающих системах 2 для волос, и является возможным для контроллера 8 в обрабатывающей системе управлять активацией и деактивацией обрабатывающего узла (и, таким образом, управлять активацией и деактивацией обрабатывающего действия) на основании определенного положения обрабатывающего устройства 4.
Следовательно, предложены обрабатывающая система и способ, которые позволяют определять положение обрабатывающего устройства, не требуя использования конструкции позиционирования, отдельной от обрабатывающего устройства.
Изменения в раскрытых вариантах осуществления могут быть понятыми и осуществлены специалистами в данной области при осуществлении заявленного изобретения, из изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения, слово "содержащий" не исключает другие элементы или этапы, и единственное число не исключает множество. Один процессорный или другой узел может исполнять функции нескольких объектов, перечисленных в формуле изобретения. Простой факт, что определенные меры изложены во взаимно разных зависимых пунктах формулы изобретения, не обозначает, что комбинация этих мер не может использоваться в качестве преимущества. Компьютерная программа может храниться/распространяться на подходящем информационном носителе, таком как оптический информационный носитель или твердотельный информационный носитель, поставляемый вместе с или в виде части других аппаратных средств, но также может распространяться в других формах, например через посредство Интернета или других проводных или беспроводных телекоммуникационных систем.
Любые ссылочные позиции в формуле изобретения не следует рассматривать как ограничение объема.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕЖЕНИЕ ЗА ПОЛОЖЕНИЕМ ДЛЯ СИСТЕМЫ ОБРАБОТКИ ВОЛОС | 2017 |
|
RU2745622C2 |
| ПРОГРАММИРУЕМАЯ СИСТЕМА ДЛЯ СТРИЖКИ ВОЛОС | 2014 |
|
RU2693665C2 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ ДЛИНЫ ПОДСТРИГАНИЯ, РЕГУЛИРОВОЧНЫЙ ПРИВОД И ПРИБОР ДЛЯ СТРИЖКИ ВОЛОС | 2017 |
|
RU2738878C2 |
| УШНОЙ ВКЛАДЫШ, УКАЗАТЕЛЬ ПОЛОЖЕНИЯ И СИСТЕМА ОБРАБОТКИ ВОЛОС | 2017 |
|
RU2733047C1 |
| ПАРИК И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2005 |
|
RU2401020C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБРАБОТКИ ЧАСТИ ТЕЛА | 2014 |
|
RU2683170C2 |
| СИСТЕМА ДЛЯ СТРИЖКИ ВОЛОС С ИЗМЕНЯЕМОЙ ДЛИНОЙ ПОДСТРИГАНИЯ | 2012 |
|
RU2623961C2 |
| ИНСТРУМЕНТ ДЛЯ ПЕРСОНАЛЬНОГО УХОДА | 2010 |
|
RU2542872C2 |
| НАБОР ЛЕЗВИЙ И УСТРОЙСТВО ДЛЯ СТРИЖКИ ВОЛОС | 2014 |
|
RU2660470C2 |
| КОНТЕЙНЕР ДЛЯ ВОЛОС И КОМПЛЕКТ ДЛЯ МАШИНКИ ДЛЯ СТРИЖКИ ВОЛОС | 2016 |
|
RU2727487C2 |

Изобретение относится к области устройств для обработки части тела пользователя. Обрабатывающая система для обработки части тела пользователя содержит контроллер и обрабатывающее устройство. Обрабатывающее устройство включает обрабатывающий узел для обработки части тела пользователя и формирующую изображение конструкцию, выполненную с возможностью получения данных изображения. Контроллер выполнен с возможностью анализа данных изображения для определения граничного участка в виде линии. Граничный участок определяют на основании контраста в данных изображения между частью тела пользователя, подлежащей обработке, и окружающим пространством вокруг части тела пользователя. Определяют положение обрабатывающего устройства относительно части тела пользователя на основании положения граничного участка в данных изображения. Изобретение также относится к способу определения положения обрабатывающего устройства относительно части тела пользователя и машиночитаемому носителю, содержащему машиночитаемый код. Техническим результатом изобретения является обеспечение возможности определения положения обрабатывающего устройства без использования конструкции позиционирования, отдельной от обрабатывающего устройства. 3 н. и 9 з.п. ф-лы, 8 ил.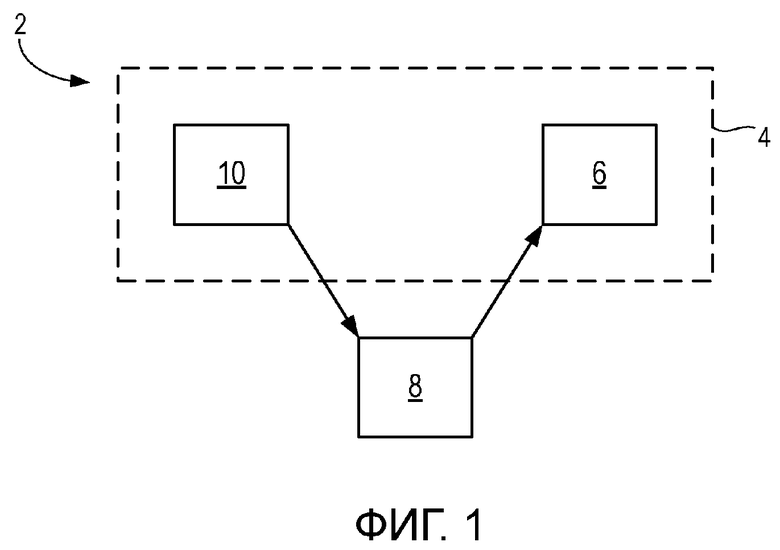
1. Обрабатывающая система для обработки части тела пользователя, содержащая контроллер и обрабатывающее устройство, при этом обрабатывающее устройство включает обрабатывающий узел для обработки части тела пользователя и формирующую изображение конструкцию, выполненную с возможностью получения данных изображения, при этом контроллер выполнен с возможностью анализа данных изображения для определения граничного участка в виде линии, определенного на основании контраста в данных изображения между частью тела пользователя, подлежащей обработке, и окружающим пространством вокруг части тела пользователя и определения положения обрабатывающего устройства относительно части тела пользователя на основании положения граничного участка в виде линии, определенного на основании контраста в данных изображения между частью тела пользователя, подлежащей обработке, и окружающим пространством вокруг части тела пользователя в данных изображения.
2. Обрабатывающая система по п.1, в которой формирующая изображение конструкция содержит датчик температуры, термический или инфракрасный датчик или группу датчиков, и в которой контроллер выполнен с возможностью определения граничного участка в виде линии, определенной на основании контраста в данных изображения между частью тела пользователя, подлежащей обработке, и окружающим пространством вокруг части тела пользователя на основании разницы между теплом, излучаемым пользователем, относительно тепла, излучаемого окружающей средой.
3. Обрабатывающая система по п.1, в которой формирующая изображение конструкция содержит датчик видимого света или группу датчиков, и в которой контроллер выполнен с возможностью определения граничного участка в виде линии, определенной на основании контраста в данных изображения между частью тела пользователя, подлежащей обработке, и окружающим пространством вокруг части тела пользователя на основании разницы между цветом и/или формой части тела относительно цвета и/или формы окружающей среды.
4. Обрабатывающая система по любому из пп.1-3, в которой контроллер выполнен с возможностью определения положения обрабатывающего устройства на основании расстояния граничного участка в виде линии, определенной на основании контраста в данных изображения между частью тела пользователя, подлежащей обработке, и окружающим пространством вокруг части тела пользователя от края изображения, полученного из данных изображения.
5. Обрабатывающая система по п.4, в которой часть тела пользователя представляет собой голову пользователя, и в которой контроллер выполнен с возможностью определения высоты обрабатывающего устройства на голове на основании расстояния граничного участка в виде линии, определенной на основании контраста в данных изображения между частью тела пользователя, подлежащей обработке, и окружающим пространством вокруг части тела пользователя от верхнего или нижнего края изображения, полученного из данных изображения.
6. Обрабатывающая система по п.4 или 5, в которой часть тела пользователя представляет собой голову пользователя, и в которой контроллер выполнен с возможностью определения уха пользователя в данных изображения и (i) определения высоты обрабатывающего устройства на голове на основании расстояния граничного участка в виде линии, определенной на основании контраста в данных изображения между частью тела пользователя, подлежащей обработке, и окружающим пространством вокруг части тела пользователя от верхнего или нижнего края изображения и положения уха на изображении; и/или (ii) определения того, находится ли обрабатывающее устройство на боковой части или задней части головы на основании положения уха на изображении.
7. Обрабатывающая система по п.1, в которой формирующая изображение конструкция содержит один или более датчиков дальности, которые выполнены с возможностью измерения расстояния от формирующей изображение конструкции до ближайшего объекта в одном или более предварительно заданных направлениях от формирующей изображение конструкции.
8. Обрабатывающая система по любому из пп.1-7, в которой контроллер дополнительно выполнен с возможностью определения обрабатывающего действия для части тела пользователя и выдачи сигнала управления на обрабатывающий узел для настройки обрабатывающего узла на выполнение определенного обрабатывающего действия.
9. Обрабатывающая система по любому из пп.1-8, в которой контроллер дополнительно выполнен с возможностью определения необходимости обрабатывающего действия для части тела пользователя и выдачи сигнала управления на обрабатывающий узел для активации или деактивации обрабатывающего узла в соответствии с необходимостью обрабатывающего действия.
10. Обрабатывающая система по любому из пп.1-9, которая представляет собой подстригающую систему для волос, обрабатывающим устройством является подстригающее устройство, а обрабатывающий узел представляет собой подстригающий узел для стрижки волос, при этом длина подстригания волос подстригающего узла является управляемой на основании сигнала управления от контроллера, и в которой контроллер дополнительно выполнен с возможностью определения длины волос для волос пользователя в определенном положении подстригающего устройства для волос, и выдачи сигнала управления на подстригающий узел для настройки подстригающего узла для стрижки волос на определенную длину волос.
11. Способ определения положения обрабатывающего устройства относительно части тела пользователя при обработке посредством системы по п.1, включающий получение данных изображения, используя формирующую изображение конструкцию, анализ данных изображения для определения граничного участка в виде линии, определенного на основании контраста в данных изображения между частью тела пользователя, подлежащей обработке, и окружающим пространством вокруг части тела пользователя, и определение положения обрабатывающего устройства относительно части тела пользователя на основании положения граничного участка в виде линии, определенного на основании контраста в данных изображения между частью тела пользователя, подлежащей обработке, и окружающим пространством вокруг части тела пользователя в данных изображения.
12. Машиночитаемый носитель, содержащий машиночитаемый код, выполненный с возможностью осуществления компьютером способа по п.11 при выполнении кода на компьютере.
| US 2013021460 A1, 24.01.2013 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| БЕЗОПАСНАЯ БРИТВА | 2008 |
|
RU2417880C2 |
| US 6681151 B1, 20.01.2004 | |||
| US 20090055024 A1, 26.02.2009 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

