ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе для обработки части тела, подлежащей обработке. Конкретно настоящее изобретение относится к системе для стрижки волос на части тела, подлежащей обработке. Настоящее изобретение относится также к способу для обработки части тела, подлежащей обработке.
УРОВЕНЬ ТЕХНИКИ ПО ИЗОБРЕТЕНИЮ
Устройства для обработки части тела, например, стрижки волос на части тела, подлежащей обработке, включают в себя снабженные приводом ручные устройства, которые прижимаются к части тела пользователя, где должны быть пострижены волосы, как, например, триммер. Такие устройства включают в себя механические устройства для стрижки волос. Пользователь выбирает длину стрижки, регулируя или выбирая направляющую, такую как гребень, которая продолжается поверх стригущего лезвия, и затем выбирает, какие зоны волос нужно постричь и какие зоны не следует стричь, соответствующим образом располагая и передвигая устройство.
При стрижке собственных волос пользователя или волос кого-либо еще необходим существенный практический навык для создания особой прически или для обеспечения презентабельного результата. Хотя можно использовать триммер для стрижки волос, такое устройство обычно обеспечивает стрижку волос до требуемой длины по всей голове. Такие устройства трудно точно установить, например, на голове пользователя. Точность обработки, обеспечиваемая устройством, зависит от умения пользователя и твердости руки. Кроме того, устройство, а также кисть и плечо пользователя могут загораживать взгляд пользователя, затрудняя тем самым точное расположение и передвижение устройства. Известны системы, которые используют приспособление, устанавливаемое на голову пользователя, чтобы создать позиционную направляющую для стригущего устройства, однако такие системы в общем случае являются громоздкими и неудобными для пользователя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей изобретения является обеспечение системы и способа для обработки части тела, подлежащей обработке, которые существенно смягчают или преодолевают проблемы, упомянутые выше.
Согласно настоящему изобретению обеспечена система для обработки части тела, подлежащей обработке, содержащая ручное обрабатывающее устройство, имеющее обрабатывающий блок, модуль формирования изображений, выполненный с возможностью генерации информации, указывающей положение обрабатывающего устройства по отношению к части тела, подлежащей обработке, основываясь на изображении части тела и обрабатывающего устройства, и направляющую поверхность, выполненную с возможностью отдаления обрабатывающего устройства от части тела, подлежащей обработке, при этом контроллер выполнен с возможностью изменения расстояния между обрабатывающим блоком и направляющей поверхностью в зависимости от информации, генерируемой модулем формирования изображений.
В соответствии с этим система работает с целью определения положения обрабатывающего устройства по отношению к части тела, подлежащей обработке, основываясь на изображении части тела и обрабатывающего устройства. Это сводит к минимуму число требуемых компонентов. При таком выполнении можно изменять расстояние между обрабатывающим блоком и направляющей поверхностью, чтобы помочь работе обрабатывающего устройства, когда это обрабатывающее устройство используется на части тела, подлежащей обработке, например, постригая волосы. Это позволяет изменять расстояние между обрабатывающим блоком и частью тела, подлежащей обработке, используя модуль формирования изображений и не требуя установки каких-либо компонентов или индикаторов на пользователя.
При таком выполнении можно регулировать расстояние между обрабатывающим блоком и частью тела, подлежащей обработке, и тем самым изменять обработку, применяемую к этой части тела. Например, в варианте выполнения для стрижки волос расстояние стрижки может изменяться, позволяя состригать разные длины волос. Контроллер способен динамически регулировать расстояние между обрабатывающим блоком и частью тела, подлежащей обработке, основываясь на информации, генерируемой модулем формирования изображений. Поэтому расстояние может автоматически изменяться, чтобы получать разные обрабатывающие характеристики, обеспечиваемые обрабатывающим блоком, в зависимости от расстояния.
Система для обработки части тела, подлежащей обработке, может быть системой для стрижки волос на части тела, подлежащей обработке, обрабатывающее устройство может быть стригущим устройством и обрабатывающий блок может быть стригущим блоком.
При таком выполнении можно создать систему для стрижки волос, которая позволит обеспечивать разные прически, производимые изменением расстояния между обрабатывающим блоком и направляющей поверхностью в зависимости от информации, генерируемой модулем формирования изображений во время использования системы. Таким образом, можно автоматически и динамически регулировать расстояние как положение обрабатывающего устройства по отношению к изменениям части тела, подлежащей обработке, например, головы пользователя.
Обрабатывающее устройство может содержать основной корпус. Направляющая поверхность может находиться на основном корпусе, а обрабатывающий блок может быть подвижным по отношению к основному корпусу для регулировки расстояния между направляющей поверхностью и обрабатывающим блоком.
При таком выполнении можно регулировать расстояние между обрабатывающим блоком и частью тела, подлежащей обработке, когда обрабатывающее устройство прижимается к части тела, подлежащей обработке, без регулировки расстояния между основным корпусом обрабатывающего устройства и частью тела, подлежащей обработке. Поэтому можно свести к минимуму любое ощущаемое передвижение стригущего устройства по отношению к части тела благодаря регулировке между направляющей поверхностью и обрабатывающим блоком. Кроме того, механические неисправности, являющиеся следствием попытки пользователя оказать сопротивление передвижению компонента обрабатывающего устройства, могут быть минимизированы.
Обрабатывающий блок может находиться на основном корпусе, а направляющая поверхность может быть подвижной по отношению к основному корпусу для регулировки расстояния между направляющей поверхностью и обрабатывающим блоком.
Поэтому можно упростить построение стригущего блока и основного корпуса, сведя к минимуму передвижение стригущего блока по направлению и в сторону от основного корпуса. Это может помочь в изготовлении устройства.
Обрабатывающий блок может дополнительно содержать приводной элемент, при этом контроллер может быть выполнен с возможностью регулировки приводного элемента в зависимости от информации, генерируемой модулем формирования изображений, чтобы изменять расстояние между обрабатывающим блоком и направляющей поверхностью.
Изображение части тела и обрабатывающего устройства может быть изображением части тела, подлежащей обработке, и обрабатывающего устройства.
Поэтому точность системы может быть максимально повышена благодаря тому, что изображение является изображением части тела, подлежащей обработке. Кроме того, построение системы упрощается, потому что модуль формирования изображений способен напрямую обеспечивать информацию о части тела, подлежащей обработке.
Изображение части тела и обрабатывающего устройства может быть изображением головы пользователя и обрабатывающего устройства, при этом модуль формирования изображений может быть выполнен с возможностью обнаружения направления взгляда головы пользователя, основываясь на изображении головы пользователя и обрабатывающего устройства.
Модуль формирования изображений может быть выполнен с возможностью обнаружения направления взгляда головы пользователя, основываясь на обнаружении одного или более объектов в изображении головы пользователя и обрабатывающего устройства, и, возможно, основываясь на обнаружении носа и/или ушей пользователя в изображении головы пользователя и обрабатывающего устройства.
При таком построении модуль формирования изображений способен точно обеспечивать информацию, указывающую положение обрабатывающего устройства относительно головы пользователя, обнаруживая один или более легко идентифицируемых объектов, таких как характерные признаки головы. Кроме того, обнаруживая нос и/или уши пользователя в изображении головы пользователя, можно легко идентифицировать направление взгляда и/или определить положение других частей головы пользователя вследствие того, что нос и/или уши находятся в фиксированном положении относительно других частей головы пользователя. Должно быть также понятно, что нос и/или уши пользователя легко определяются модулем формирования изображений, будучи объектами, выступающими из остальной части головы. Хотя нос и/или уши легко определяются модулем формирования изображений, должно быть также понятно, что может быть определено положение других характерных признаков, например, глаз и/или рта пользователя благодаря их контрасту с остальной частью лица пользователя.
Модуль формирования изображений может содержать дальномерную камеру.
Поэтому модуль формирования изображений может выполняться с возможностью генерации информации, напрямую указывающей положение обрабатывающего устройства.
Система может дополнительно содержать инерциальный измерительный блок, выполненный с возможностью генерации информации, указывающей положение обрабатывающего устройства.
Поэтому можно максимально повысить точность информации, указывающей положение обрабатывающего устройства, которая обеспечивается как часть системы. Кроме того, инерциальный модуль наведения может также предоставлять информацию, указывающую положение обрабатывающего устройства, которая доставляется в контроллер, в том случае, когда модуль формирования изображений не способен обеспечить такую информацию. Это позволяет обеспечить уровень надежности для защиты от неисправностей в модуле формирования изображений.
Контроллер может быть выполнен с возможностью изменения расстояния между обрабатывающим блоком и направляющей поверхностью обрабатывающего устройства в зависимости от информации, генерируемой модулем формирования изображений и инерциальным измерительным блоком.
При таком выполнении можно добиться максимальной точности определяемого положения обрабатывающего устройства относительно части тела, подлежащей обработке.
Контроллер может быть выполнен с возможностью изменения расстояния между обрабатывающим блоком и направляющей поверхностью обрабатывающего устройства в зависимости от информации, генерируемой модулем формирования изображений и инерциальным измерительным блоком, когда обрабатывающее устройство находится вне зоны оптического считывания модуля формирования изображений.
Поэтому можно помочь сохранять и/или максимально повышать точность информации, генерируемой модулем формирования изображений, когда обрабатывающее устройство находится за пределами зоны оптического считывания модуля формирования изображений.
Контроллер может быть выполнен с возможностью калибровки инерциального измерительного блока, основываясь на информации, генерируемой модулем формирования изображений.
При таком выполнении можно добиться максимальной точности информации, указывающей положение обрабатывающего устройства во время работы системы. В частности, такое выполнение помогает защитить счетчик от отклонений в показаниях инерциальной системы наведения, происходящих с течением времени, и, таким образом, накапливающих ошибку положения.
Модуль формирования изображений может быть выполнен с возможностью генерации информации, указывающей ориентацию обрабатывающего устройства по отношению к части тела, подлежащей обработке, основываясь на изображении части тела и обрабатывающего устройства.
В этом случае модуль формирования изображений способен также определять информацию, указывающую ориентацию обрабатывающего устройства. Это может помочь максимально повысить точность обработки. Кроме того, использование модуля формирования изображений, определяющего информацию, указывающую ориентацию обрабатывающего устройства, позволит изменять расстояние между обрабатывающим блоком и направляющей поверхностью обрабатывающего устройства в зависимости от информации об ориентации обрабатывающего устройства, генерируемой модулем формирования изображений.
Генерацией информации, указывающей ориентацию обрабатывающего устройства по отношению к части тела, подлежавшей обработке, можно также определять угол, под которым располагается обрабатывающий блок относительно части тела, подлежащей обработке.
Контроллер может быть выполнен с возможностью определения расстояния между обрабатывающим блоком и направляющей поверхностью в относительном положении, основываясь на заданном расстоянии между обрабатывающим блоком и направляющей поверхностью для этого относительного положения.
Расстояние между обрабатывающим блоком и направляющей поверхностью может быть первой рабочей характеристикой, на изменение которой настраивается контроллер, при этом контроллер может выполняться с возможностью изменения второй рабочей характеристики обрабатывающего устройства в зависимости от информации, генерируемой модулем формирования изображений.
Поэтому можно применительно к одной или более другим рабочим характеристикам обрабатывающего устройства, подлежащим изменению, помочь системе обеспечить усиленную обработку части тела, подлежащей обработке.
Согласно другому аспекту изобретения обеспечено обрабатывающее устройство, выполненное с возможностью использования его в системе, как описано выше.
Согласно другому аспекту настоящего изобретения обеспечен способ обработки части тела, используя обрабатывающее устройство применительно к части тела, подлежащей обработке, основываясь на изображении части тела и обрабатывающего устройства, используя модуль формирования изображений, изменяя расстояние между обрабатывающим блоком и направляющей поверхностью обрабатывающего устройства в зависимости от информации, генерируемой модулем формирования изображений.
При таком способе можно определить положение обрабатывающего устройства, основываясь только на изображении части тела и обрабатывающего устройства. Это сводит к минимуму число этапов, которые требуются для изменения расстояния между обрабатывающим блоком и направляющей поверхностью обрабатывающего устройства, основываясь на объектах, таких как характерные признаки, на части тела. При таком построении можно изменять расстояние между обрабатывающим блоком и направляющей поверхностью, когда обрабатывающее устройство используется на части тела, подлежащей обработке, например, постригая волосы.
Эти и другие аспекты изобретения станут очевидными и будут пояснены со ссылкой на варианты осуществления, описанные ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения будут теперь описаны со ссылкой на сопроводительные чертежи, на которых:
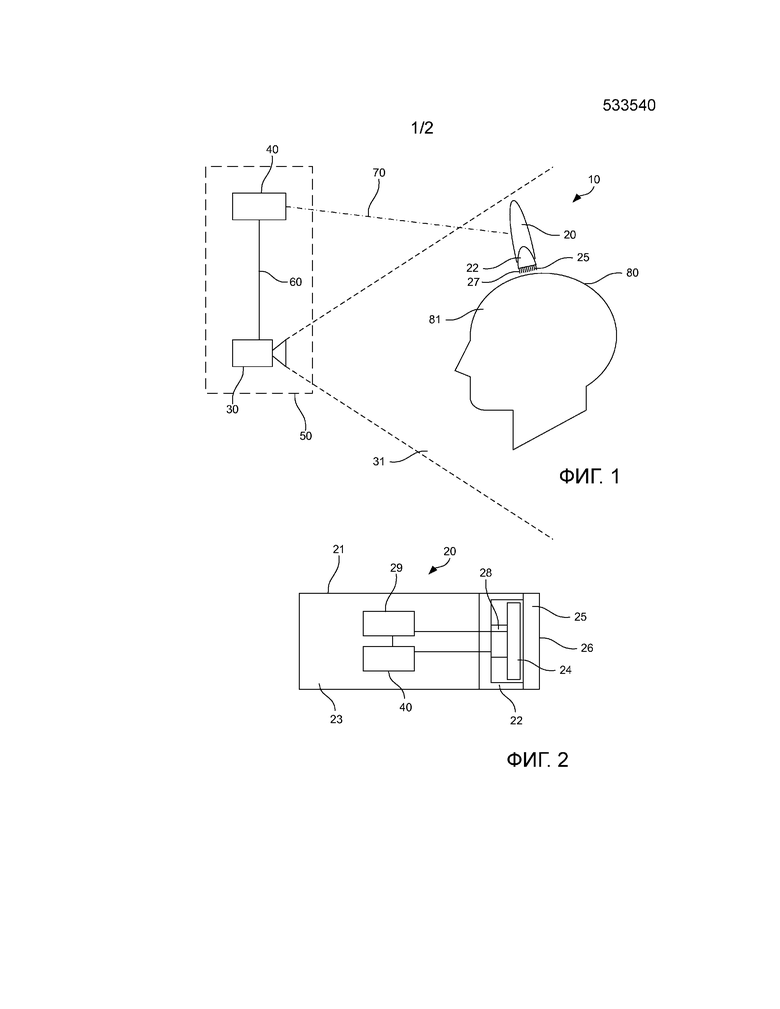
ФИГ. 1 – схематическое представление системы для стрижки волос;
ФИГ. 2 – схематическое представление стригущего устройства;
ФИГ. 3 – блок-схема системы, показанной на фиг. 1.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Описанные здесь варианты осуществления представляют систему для стрижки волос. На фиг. 1 показана система 10 для стрижки волос. Система 10 для стрижки волос действует как система для обработки части тела, подлежащей обработке. Система 10 содержит стригущее устройство 20 и камеру 30. Камера 30 действует как модуль формирования изображений. Камера 30, действующая как модуль формирования изображений, является идентификатором положения, выполненным с возможностью генерации информации, указывающей положение обрабатывающего устройства по отношению к части тела, подлежащей обработке. То есть индикатор положения способен генерировать информацию, указывающую положение одного или более объектов. Система 10 дополнительно содержит контроллер 40. Контроллер 40 выполнен с возможностью управления работой стригущего устройства 20.
В вариантах осуществления, представленных здесь, система 10 описывается со ссылкой на пользователя системы 10, который является лицом, подлежащим обработке. То есть пользователь использует систему, чтобы обработать самого себя. Однако должно быть понятно, что в альтернативном варианте осуществления пользователь является лицом, использующим систему 10 для выполнения обработки, применяя систему 10 к другому лицу.
Камера 30 и контроллер 40 образуют часть базового устройства 50. Альтернативно камера 30 и контроллер 40 располагаются отдельно. Контроллер 40 может находиться в стригущем устройстве 20. Камера 30 может располагаться на стригущем устройстве 20. Камера 30, контроллер 40 и стригущее устройство 20 сообщаются друг с другом. В настоящем варианте осуществления камера 30 и контроллер 40 сообщаются через проводное соединение 60. Контроллер 40 и стригущее устройство 20 сообщаются через беспроводное соединение 70. Предусматриваются альтернативные построения. Например, контроллер 40 и стригущее устройство 20 могут соединяться проводным соединением, и/или контроллер 40 и камера 30 могут соединяться беспроводным соединением. Беспроводные модули, например, радио- или инфракрасные передатчики и приемники используются для обеспечения беспроводного соединения разных компонентов. Должно быть понятно, что могут быть использованы технологии Wi-Fi™ и Bluetooth™.
Базовое устройство 50 в настоящем варианте осуществления является выделенной частью системы 10. Однако должно быть понятно, что базовое устройство 50 может быть устройством, имеющим модуль формирования изображений и/или контроллер помимо прочих компонентов. Например, базовое устройство 50 может быть или содержать мобильный телефон, планшетный компьютер или лэптоп компьютер, другое мобильное устройство или немобильное устройство, такое как компьютерный монитор или доковая станция с встроенной или прикрепляемой камерой. Базовое устройство может быть образовано как два или более отдельных вторичных блоков.
Как следует из фиг. 1 и 2, стригущее устройство 20 является ручным электрическим триммером для волос. Однако должно быть очевидно, что стригущее устройство может иметь альтернативное выполнение. Например, стригущее устройство 20 может быть ручным электрическим бритвенным устройством. Стригущее устройство 20 действует как обрабатывающее устройство. Стригущее устройство 20 передвигается по коже 80 части тела пользователя, например, его головы 81, чтобы подстричь волосы на этой части тела. Стригущее устройство 20 содержит основной корпус 21 и стригущую головку 22 на одном конце основного корпуса 21. Основной корпус 21 определяет участок 23 рукоятки. Корпус 21 и стригущая головка 22 выполнены таким образом, что участок 23 рукоятки может удерживаться пользователем.
Стригущая головка 22 имеет стригущий блок 24. Стригущий блок 24 выполнен с возможностью стрижки волос. Стригущий блок 24 действует как обрабатывающий блок. Стригущий блок 24 имеет один или более неподвижных обрабатывающих элементов (не показаны) и один или более подвижных обрабатывающих элементов, которые движутся относительно одного или более неподвижных обрабатывающих элементов. Волосы выступают за неподвижный обрабатывающий элемент и срезаются подвижным обрабатывающим элементом. В частности, в одном варианте осуществления стригущий блок 24 содержит неподвижное лезвие, действующее как неподвижный обрабатывающий элемент, и подвижное лезвие, действующее как подвижный обрабатывающий элемент. Неподвижное лезвие имеет неподвижный край, содержащий первую решетку зубьев. Подвижное лезвие имеет подвижный край, содержащий вторую решетку зубьев. Неподвижный край и подвижный край параллельны друг другу. Подвижное лезвие совершает возвратно-поступательное движение относительно неподвижного лезвия в относящемся к стрижке варианте осуществления. Поэтому вторая решетка зубьев выполняется с возможностью совершения возвратно-поступательного движения относительно первой решетки зубьев. В настоящем варианте осуществления неподвижный обрабатывающий элемент и подвижный обрабатывающий элемент образуют взаимодействующие механические срезающие части (не показаны).
Хотя выше описан один стригущий блок, должно быть понятно, что стригущая головка 22 может содержать два или более стригущих блоков. Хотя в этом построении стригущий блок содержит один или более неподвижных обрабатывающих элементов и один или более подвижных обрабатывающих элементов, должно быть понятно, что предполагаются альтернативные построения для стрижки. Например, стригущий блок 24 может содержать фольгу (не показана), через которую выступают волосы, и подвижное лезвие (не показано), которое движется поверх фольги.
Стригущий блок 24 приводится в действие приводным устройством 29. Приводное устройство 29 работает для приведения в действие стригущего блока 24, совершая приводную операцию. В настоящем варианте осуществления приводное устройство 29 является электрическим двигателем. Приводное устройство 29 обеспечивает возвратно-поступательное движение подвижного элемента (элементов) по отношению к неподвижному элементу (элементам). Управление приводным устройством 29 осуществляется контроллером 40.
Стригущая головка 22 имеет направляющую 25. Направляющая 25 имеет направляющую поверхность 26. Направляющая поверхность 26 выполнена с возможностью прижатия к части тела, подлежащей обработке. Направляющая поверхность 26 отдалена от стригущего блока 24. Однако в одном варианте осуществления стригущая головка 22 может регулироваться таким образом, что направляющая поверхность 26 и стригущий блок 24 располагаются в одной плоскости друг с другом. Направляющая поверхность 26 выполнена с возможностью отдаления стригущей головки 22 от части тела, подлежащей обработке, например, кожи 80 головы 81 пользователя.
В настоящем варианте осуществления направляющая 25 является гребнем. Направляющая 25 имеет множество параллельных, но разнесенных друг от друга зубьев 27 гребня. Разнесенные зубья 27 гребня позволяют волосам проходить через них, выставляясь под стригущий блок 24, чтобы быть срезанными стригущим блоком 24. Отдаленная от основного корпуса 21 поверхность каждого зуба образует направляющую поверхность 26. Направляющая 25 устанавливается на основном корпусе 21. Направляющая 25 съемно устанавливается на основном корпусе 21. Это позволяют очищать стригущий блок 24 и заменять набавляющую 25 другой направляющей и/или возвращать ее на место.
Направляющая 25 имеет переднюю кромку. Передняя кромка выровнена с подвижным краем подвижного обрабатывающего элемента, но отдалена от него. Передняя кромка образует край направляющей поверхности 26. Передняя кромка определяется концами зубьев 27 гребня. Передняя кромка определяет пересечение между направляющей поверхностью 26 направляющей 25 и передней поверхностью направляющей 25.
Расстояние между направляющей поверхностью 26 и стригущим блоком 24 может регулироваться. То есть направляющая поверхность 26 и стригущий блок 24 могут передвигаться, приближаясь и удаляясь друг от друга. Расстояние между направляющей поверхностью 26 и стригущим блоком 24 является первой рабочей характеристикой. В настоящем варианте осуществления направляющая 25 фиксировано установлена на основном корпусе 21. То есть направляющая 25 предохраняется от перемещения по направлению или в сторону от основного корпуса 21. Однако направляющая 25 может поворачиваться относительно основного корпуса 21. Стригущий блок 24 подвижно смонтирован на основном корпусе 21. То есть стригущий блок 24 может перемещаться, приближаясь и удаляясь от направляющей поверхности 26. Стригущий блок 24 может также поворачиваться относительно основного корпуса 21. Приводной элемент 28 работает для передвижения стригущего блока 24 относительно направляющей поверхности 26. Приводной элемент 28 является линейным приводным элементом и может быть, например, механическим приводным элементом или электромагнитным приводным элементом.
Стригущий блок 24 в этом варианте осуществления устанавливается на приводном элементе 28, который выполнен с возможностью передвижения стригущего блока 24 в линейном направлении, приближая и удаляя его от контактирующей с кожей направляющей поверхности, отзываясь на команды от контролера 40.
В зависимости от типа используемого приводного элемента стригущий блок 24 может быть установлен на линейной скользящей направляющей или рейке, с тем чтобы стригущий блок передвигался под воздействием приводного элемента 28 и оставался параллельным направляющей поверхности 26. Передвижение может быть в направлении, которое перпендикулярно направляющей поверхности 26, или оно может происходить под углом.
При описанном выше варианте построения стригущий блок 24 передвигается относительно направляющей поверхности 26. Поэтому направляющая поверхность 26 устанавливается в стационарном положении по отношению к основному корпусу 21. Это означает, что расстояние между направляющей поверхностью 26 и рукояткой 23 не изменяется во время использования стригущего устройства 20. Поэтому отсутствует ощутимое передвижение стригущего устройства 20 в руке пользователя.
Расстояние между стригущим блоком 24 и направляющей поверхностью 26 изменяется таким образом, что стригущее устройство 20 находится между минимальным состоянием, в котором расстояние между стригущим блоком 24 и направляющей поверхностью 26 имеет минимальное значение, и максимальным состоянием, в котором расстояние между стригущим блоком 24 и направляющей поверхностью 26 имеет минимальное значение.
Стригущее устройство 20 в настоящем варианте осуществления выполнено с возможностью иметь максимальное состояние около 100 мм. Однако должно быть понятно, что возможны альтернативные диапазоны. Например, бритва для подравнивания волос на лице может быть выполнена с возможностью установки максимального состояния около 10 мм. Такой уменьшенный диапазон может повысить точность стригущего устройства 20.
Хотя в описанном выше варианте осуществления стригущий блок 24 подвижен по отношению к направляющей поверхности 26, в альтернативном варианте осуществления направляющая 25, и поэтому направляющая поверхность 26, подвижны по отношению к стригущему блоку 24. Стригущий блок 24 может быть фиксировано прикреплен к основному корпусу 21, и направляющая 25 может передвигаться относительно основного корпуса 21. В таком варианте осуществления приводной элемент воздействует на направляющую 25. Направляющая поверхность 26 может передвигаться, приближаясь и удаляясь от стригущего блока 24. Направляющая 25 может быть скользящей по одной или более реек, чтобы скользить относительно стригущего блока 24. При таком варианте осуществления устройство стригущего блока 24 упрощается.
В описанном выше построении расстояние между направляющей поверхностью 26 и стригущим блоком 24 может регулироваться посредством работы приводного элемента. Однако в одном варианте осуществления расстояние между направляющей поверхностью 26 и стригущим блоком 24 может также вручную регулироваться пользователем.
Камера 30, действующая как модуль формирования изображений, использует диапазонное формирование изображений для определения положения элементов внутри поля зрения, или зоны 31 оптического считывания, камеры 30.
Камера 30 производит двухмерное изображение со значением расстояния элементов внутри зоны 31 оптического считывания относительно заданного положения, такого как сам датчик камеры. В настоящем варианте осуществления камера 30 выполнена с возможностью использования техники структурированного света для определения положения, включающего в себя расстояние, элементов внутри зоны 31 оптического считывания камеры 30. Такая техника освещает поле зрения специально разработанной картиной света. Преимуществом такого варианта осуществления является то, что глубина может быть определена в любой данный момент времени, используя только одно изображение отраженного света. Альтернативно камера 30 выполняется с возможностью использования техники, основанной на времени освещения, для определения положения, включающего в себя расстояние, элементов внутри поля зрения камеры 30. Преимуществом этого варианта осуществления является то, что число движущихся частей является минимальным. Другие способы включают в себя эхографические технологии, стерео триангуляцию, триангуляцию листом света, интерферометрию и кодированную апертуру.
Камера 30 является цифровой камерой, способной генерировать данные изображений, представляющие объект съемки, принятый датчиком камеры. Данные изображений могут быть использованы для сбора последовательных кадров как видеоданных. Зона 31 оптического считывания является полем зрения, в пределах которого оптические волны, отражающиеся или испускаемые объектами, обнаруживаются датчиками камеры. Камера 30 обнаруживает свет в видимой части спектра, но может также быть инфракрасной камерой.
Камера 30, действующая как модуль формирования изображений, выполняется с возможностью генерации информации, указывающей положение элементов внутри зоны 31 оптического считывания. Камера 30 генерирует информацию, основываясь на данных изображения, генерируемых датчиком камеры.
В настоящем варианте осуществления камера 30, действующая как модуль формирования изображений, генерирует визуальное изображение с глубиной, например, RGB-D карту. Камера 30 генерирует визуальное изображение с картой глубины элементов внутри зоны 31 оптического считывания камеры 30. Предполагаются альтернативные средства генерации информации, указывающей положение элементов внутри зоны 31 оптического считывания. Например, камера 30 может генерировать глубинное изображение (D-карту) элементов внутри зоны 31 оптического считывания.
Камера 30 выполняется с возможностью генерации визуального изображения с картой глубины с 30 кадрами за минуту. Кроме того, камера 30 имеет разрешение 640×480. Диапазон глубин находится в пределах между 0,4 м и 1,5 м. Угол поля зрения находится в пределах между 40 градусами и 50 градусами. Это обеспечивает достаточную область для того, чтобы пользователь расположился в пределах зоны 31 оптического считывания. Разрешающая способность по глубине выполняется так, чтобы составлять около 1,5 м в пределах зоны 31 оптического считывания.
Хотя приведенные выше параметры были найдены достаточными для определения положения для стрижки волос, должно быть понятно, что могут быть использованы альтернативные параметры. Например, может быть использован фильтр (не показан) для повышения точности существующего разрешения.
На фиг. 3 показана блок-схема выбранных компонентов системы 10. Система 10 имеет стригущее устройство 20, камеру 30 и контроллер 40. Система 10 имеет также пользовательский вводной блок 90, память 100, RAM 110, один или более модулей обратной связи, например, включающих в себя динамик 120 и/или дисплей 130, и источник 140 питания. Кроме того, система 10 имеет инерциальный измерительный блок (IMU) 150.
Память 100 может быть энергонезависимой памятью, такой как постоянная память (ROM), накопитель на жестком диске (HDD) или твердотельный накопитель (SSD). Память 100 хранит, среди прочего, операционную систему. Память 100 может располагаться дистанционно. Контроллер 40 может быть способен обращаться к одному или более объектам, таким как один или более профилей, хранимым памятью 100, и загружать один или более хранимых объектов в RAM 110.
RAM 110 используется контроллером 40 для временного хранения данных. Операционная система может содержать код, который при выполнении его контроллером 40 в сочетании с RAM 110 управляет работой каждого из компонентов аппаратного оборудования системы 10. Контроллер 40 может быть способен обеспечивать, чтобы один или более объектов, таких как один или более профилей, запоминались дистанционно или локально памятью 100 и/или в RAM 110.
Источник питания 140 может быть батареей. Отдельные элементы 140a, 140b питания источника питания могут раздельно подавать питание на базовое устройство 50 и стригущее устройство 20. Альтернативно один элемент источника питания может подавать питание как на базовое устройство 50, так и на стригущее устройство 20. В настоящих вариантах каждый из элементов источника питания является встроенной заряжаемой аккумуляторной батареей, однако должно быть понятно, что возможно альтернативное средство электропитания, например, шнур электропитания, который подсоединяет систему 100 к внешнему источнику электроэнергии.
Контроллер 40 может иметь любую подходящую форму. Например, контроллер 40 может быть микроконтроллером, множеством контроллеров, процессором или множеством процессоров. Контроллер 40 может быть образован одним или несколькими модулями. Система 10 содержит также некоторый вид пользовательского интерфейса. По желанию система 10 включает в себя дополнительные органы управления и/или дисплеи для регулировки некоторых рабочих характеристик устройства, таких как мощность или высота стрижки, и/или для информирования пользователя о текущем состоянии устройства.
Динамик 120 располагается в базовом устройстве. Альтернативно динамик может находиться на стригущем устройстве или располагаться отдельно. В таком устройстве динамик будет располагаться близко к голове пользователя, чтобы позволить пользователю легко услышать звуковые сигналы, производимые динамиком. Динамик 120 срабатывает в ответ на сигналы от контроллера 40, чтобы подавать звуковые сигналы пользователю. Должно быть понятно, что в некоторых вариантах осуществления динамик 120 может отсутствовать.
Дисплей 130 располагается в базовом устройстве 50. Альтернативно дисплей 130 может находиться на стригущем устройстве или располагаться отдельно. Дисплей 130 срабатывает в ответ на сигналы от контроллера 40, чтобы воспроизвести визуальные индикаторы или сигналы для пользователя. Должно быть понятно, что в некоторых вариантах осуществления дисплей 130 может отсутствовать.
Модуль обратной связи, или один из модулей обратной связи, может также включать в себя вибрационный двигатель, например, для обеспечения тактильной обратной связи с пользователем.
Пользовательский вводной блок 90 в настоящем варианте осуществления включает в себя один или более аппаратных ключей (не показаны), таких как кнопка или выключатель. Пользовательский вводной блок 90 располагается на базовом устройстве 50, хотя должно быть понятно, что пользовательский вводной блок может находиться на стригущем устройстве 20 или быть их сочетанием. Пользовательский вводной блок 90 используется, например, чтобы позволить пользователю выбрать режим работы, привести в действие систему 10 и/или выключить систему 10. Пользовательский вводной блок может также включать в себя механическое средство, чтобы обеспечить возможность ручной регулировки одного или более элементов системы 10.
Инерциальный измерительный блок (IMU) 150 находится в стригущем устройстве 20. В настоящей конфигурации IMU 150 размещен в основном корпусе 21 стригущего устройства 20. IMU известны, и поэтому подробное описание здесь отсутствует. IMU 150 выполнен с возможностью обеспечения считывания относительного перемещения (передвижения и поворота) по шести осям. IMU 150 выполнен с возможностью генерации информации, указывающей положение стригущего устройства 20. Информация, генерируемая IMU 150, доставляется в контроллер 40.
Система 10 на фиг. 1 приводится в рабочее состояние расположением базового устройства 50 в подходящем месте для стрижки волос. То есть базовое устройство 50 располагается таким образом, чтобы пользователь смог располагать часть тела, подлежащую обработке, например, голову в пределах зоны 31 оптического считывания. Например, камера 30 располагается приблизительно на высоте, на которой будет находиться голова пользователя во время работы системы 10. В варианте осуществления, в котором камера 30 отделена от базового устройства 50 или базовое устройство отсутствует, камера 30 располагается, как будет необходимо. Ручное стригущее устройство 20 удерживается пользователем.
Система 10 приводится в действие пользователем с помощью пользовательского вводного блока 90. Контроллер 40 управляет приводным устройством 29, чтобы привести в действие стригущий блок 24 в режиме стрижки. Должно быть понятно, что стригущий блок 24 может иметь более одного режима обработки. Контроллер 40 управляет приводным элементом 28 для определения положения стригущего блока 24 по отношению к направляющей поверхности 26.
Когда система приводится в действие, стригущее устройство 20 находится между минимальным состоянием, в котором расстояние между стригущим блоком 24 и направляющей поверхностью 26 имеет минимальное значение, и максимальным состоянием, в котором расстояние между стригущим блоком 24 и направляющей поверхностью 26 имеет максимальное значение. Контроллер 40 первоначально устанавливается в максимальное состояние, с тем чтобы волосы не могли быть случайно срезаны до более короткой длины, чем требуется.
Пользователь использует систему 10, удерживая в руке ручное стригущее устройство 20 и передвигая стригущее устройство 20 по областям тела, на которых должны быть подстрижены волосы. Направляющая поверхность 26 стригущей головки 22 плоско прижимается к коже, и волосы, проникшие через направляющую 25 и вступившие во взаимодействие со стригущим блоком 24, срезаются. Например, для стрижки волос на волосистой части кожи головы 81 пользователя этот пользователь прижимает направляющую поверхность 26 к коже головы и передвигает стригущее устройство 20 поверх кожи 81, из которой выступают волосы, которые должны быть подстрижены. Пользователь может передвигать стригущее устройство вокруг поверхности кожи головы. Волосы, подлежащие срезанию по мере того как стригущее устройство 20 будет двигаться поверх кожи 81, будут зависеть от размера и формы направляющей поверхности 26 направляющей 25, которая располагается проксимально к коже, и также от размера, формы и расположения стригущего блока 24 стригущей головки 22.
В традиционном триммере глубину срезающего действия триммера трудно предугадать и контролировать, и пользователь полагается на свое умение и твердость руки, чтобы передвигать устройство соответствующим образом. Кроме того, длина срезаемых волос зависит от контролирования пользователем расстояния между направляющей поверхностью устройства и кожей пользователя, так чтобы срезалась выровненная длина волос, или обеспечивается перемещением направляющей в желаемое положение для установки длины срезания. Это может быть затруднительным, когда приходится удерживать устройство, так как любое неоправданное движение кожи или руки может вызвать ошибку. Кроме того, устройство и/или же кисть и плечо пользователя могут загораживать взгляд пользователя при пользовании устройством, и это может привести в результате к передвижению устройства нежелательным образом и вызвать неточность или ошибку. Поэтому трудно использовать такое устройство, чтобы добиться аккуратной стрижки волос.
Изобретение, определенное формулой изобретения, обеспечивает систему для обработки части тела, подлежавшей обработке, включая сюда стрижку волос, которая обеспечивает возможность изменений в обработке, такой как стрижка волос, применительно к части тела, подлежащей обработке, в зависимости от положения обрабатывающего устройства по отношению к части тела, подлежащей обработке. Система приводится в действие для обеспечения информации, указывающей положение обрабатывающего устройства по отношению к части тела, подлежащей обработке, и для изменения расстояния между стригущим блоком 24 и направляющей поверхностью 26 обрабатывающего устройства в зависимости от предоставленной информации.
Способ использования системы 10 содержит первоначальный этап расположения пользователем, который может стричь волосы на части своего собственного тела или на теле другого пользователя, стригущего устройства 20 по отношению к части тела, на которой должны быть подстрижены волосы, например, на голове пользователя. Камера 30, действующая как модуль формирования изображений, работает для генерации информации, указывающей положение стригущего устройства 20, а также части тела, подлежащей обработке. В настоящем варианте осуществления камера 30 генерирует данные изображений, представляющие объект съемки, принятый датчиком камеры в пределах зоны 31 оптического считывания. В таком варианте осуществления камера 30 производит карту глубины, например, визуальное изображение с картой глубины объектов внутри зоны 31 оптического считывания.
Камера 30 выполняется с возможностью генерации информации, указывающей часть тела, подлежащую обработке, основываясь на полученном изображении объектов внутри зоны 31 оптического считывания. Например, камера 30 работает для генерации информации, указывающей голову пользователя, основываясь на изображении, произведенным внутри зоны 31 оптического считывания, включающим в себя голову пользователя. Камера 30 выполняется с возможностью генерации информации, указывающей положение и/или ориентацию головы пользователя. Для эффективного определения расположения головы пользователя из имеющейся в распоряжении карты объектов внутри зоны 31 оптического считывания определяются характерные признаки головы пользователя.
В таком варианте осуществления камера 30 выполнена с возможностью обнаружения направления взгляда головы пользователя. То есть направления, в котором обращена голова пользователя по отношению к камере 30. Обнаружение направления взгляда головы пользователя основано на обнаружении одного или более объектов в изображении головы пользователя и обрабатывающего устройства и, возможно, основано на обнаружении носа и/или ушей пользователя в изображении головы пользователя и обрабатывающего устройства. Было найдено, что местоположение носа и/или ушей пользователя легко определяется в изображении, представляющем объекты в зоне 31 оптического считывания. Поскольку нос и уши выступают относительно остальной части головы пользователя, было найдено, что местоположение одного или более этих объектов легко определяется в изображении, включающем в себя голову пользователя.
Характерные признаки головы пользователя, например, нос и/или уши пользователя, идентифицируются камерой 30. Было установлено, что нос и уши могут обнаруживаться быстро и постоянно в карте глубины, производимой камерой 30, действующей как модуль формирования изображений, используя известный способ обнаружения, например, сопоставление 3D образов. Хотя в настоящем построении камера 30 выполнена с возможностью идентификации носа и/или ушей пользователя, должно быть понятно, что камера 30 может быть выполнена с возможностью обнаружения одного или более альтернативных признаков части тела в зоне 31 оптического считывания. Например, камера 30 может быть выполнена с возможностью обнаружения формы головы пользователя, глаз, губ, дефектов, рубцов, родимых пятен и/или других характерных признаков лица. Такие характерные признаки могут идентифицироваться камерой 30 и запоминаться контроллером 40 в памяти 100 для обращения к ним во время использования системы 10 или во время последующего использования системы 10.
Преимуществом камеры 30, выполненной с возможностью обнаружения направления взгляда головы пользователя, основываясь на направлении ушей и носа пользователя в изображении головы пользователя, является то, что в общем случае два или более из этих трех характерных признаков будут идентифицируемыми в изображении части тела независимо от направления взгляда головы пользователя. Поэтому из общего положения и ориентации этих трех характерных признаков можно генерировать информацию, указывающую положение головы по диапазону разных положений головы по отношению к камере 30. Следовательно, можно приспосабливать движения головы во время использования системы.
Камера 30 выполняется с возможностью генерации информации, указывающей стригущее устройство 20, действующее как обрабатывающее устройство. Форма стригущего устройства 20 известна и может быть запомнена, например, в памяти 100, чтобы обращаться к ней во время работы камеры 30. Положение стригущего устройства 20 определяется подобным образом, что и для части тела, подлежащей обработке. Для того чтобы эффективно обнаруживать местоположение стригущего устройства 20 из имеющейся в распоряжении карты объектов внутри зоны 31 оптического считывания, идентифицируются характерные признаки стригущего устройства 20. Стригущее устройство 20 может быть снабжено маркерами (не показаны), которые легко распознаются камерой 30.
Камера 30 выполнена с возможностью приспособления части стригущего устройства 20, загороженной в изображении, представляющем объекты внутри зоны 31 оптического считывания. То есть камера 30 выполнена с возможностью идентификации двух или более характерных признаков стригущего устройства 20, так что камера способна определять местоположение стригущего устройства 20 из существующей карты объектов внутри зоны 31 оптического считывания, даже когда один или более характерных признаков стригущего устройства 20 загорожены другим объектом, например, кистью руки пользователя, в полученном изображении объектов внутри зоны 31 оптического считывания.
Хотя в описанном выше варианте осуществления изображение части тела, для которой получается изображение, соответствует изображению части тела, подлежащей обработке, должно быть понятно, что изобретение не ограничивается этим. Например, камера 30 может генерировать данные изображений, включающие в себя данные, представляющие нижнюю часть головы пользователя, а система 10 может экстраполировать эти данные для генерации информации, указывающей верхнюю часть головы пользователя.
Хотя камера 30 способна определять положение стригущего устройства 20 из имеющейся в распоряжении карты объектов внутри зоны 30 оптического считывания, когда по меньшей мере один из характерных признаков стригущего устройства 20 может быть идентифицирован в изображении, полученном от объектов внутри зоны 31 оптического считывания, было установлено, что стригущее устройство 20 может быть полностью загорожено в изображении, например, когда стригущее устройство 20 располагается для обработки задней стороны головы пользователя и взгляд пользователя направлен в сторону камеры 30.
Когда камера 30 не может обеспечить информацию, указывающую положение стригущего устройства 20 или указывает, что стригущее устройство 20 не найдено среди данных изображения, представляющих объект съемки, принятый датчиком камеры в пределах зоны 31 оптического считывания, контроллер 40 выполняется с возможностью обращения к информации, указывающей положение стригущего устройства 20, предоставленной инерциальным измерительным блоком 150. Инерциальный измерительный блок 150 располагается в стригущем устройстве 20 и может находиться в рабочем состоянии в течение всего времени использования системы 10 или только тогда, когда он приводится в действие контроллером 40, например, когда камера 30 не может обнаружить стригущее устройство 20, которое находится за пределами зоны 31 оптического считывания камеры 30.
Инерциальный измерительный блок 150 выполнен с возможностью генерации информации, указывающей положение стригущего устройства 20, основываясь на собственном положении инерциального измерительного блока 150 в стригущем устройстве 20. Инерциальный измерительный блок 150 обеспечивает считывание относительного перемещения – передвижения и поворота – по 6 осям.
Контроллер 40 может быть выполнен с возможностью калибровки инерциального измерительного блока 150, основываясь на информации, генерируемой камерой 30, когда стригущее устройство 20 находится в пределах зоны 31 оптического считывания.
Хотя в настоящем варианте осуществления контроллер 40 выполнен с возможностью обращения к информации, генерируемой инерциальным измерительным блоком 150, когда обрабатывающее устройство находится за пределами зоны оптического считывания модуля формирования изображений, должно быть понятно, что контроллер 40 может быть выполнен с возможностью обращения к информации, генерируемой модулем формирования изображений и модулем системы инерциального наведения через использование системы 10. В альтернативном варианте осуществления инерциальный измерительный блок 150 может отсутствовать. В таком варианте осуществления информация, указывающая положение стригущего устройства 20 по отношению к части тела, подлежащей обработке, может быть определена экстраполяцией данных изображения, представляющих объект съемки, принятый датчиком камеры в пределах зоны 31 оптического считывания. Альтернативно контроллер 40 может быть выполнен с возможностью обеспечения обратной связи с пользователем, например, посредством звуковых сигналов, чтобы дать указание пользователю на изменение направления его взгляда по отношению к камере 30, с тем чтобы стригущее устройство 20 находилось в пределах зоны 31 оптического считывания и камера 30 была способна генерировать данные изображения, представляющие объект съемки, принятый датчиком камеры в пределах зоны 31 оптического считывания.
Когда положение части тела, подлежащей обработке, в данном случае головы пользователя, и стригущего устройства известны для камеры 30, действующей как модуль формирования изображений, можно определить положение стригущего устройства 20 относительно части тела, подлежащей обработке, основываясь на изображении части тела и стригущего устройства 20. Относительные положения могут быть вычислены, основываясь на векторном вычитании. Поэтому относительные положения могут быть легко определены.
Хотя в описанном выше варианте осуществления относительные положения стригущего устройства 20 и части головы пользователя, подлежащей обработке, определены камерой 30, должно быть понятно, что информация, генерируемая камерой 30, которая указывает положение стригущего устройства 20 и части головы пользователя, подлежащей обработке, может быть подана в контроллер 40 или в другой компонент системы 10, который выполнен с возможностью определения относительных положений стригущего устройства 20 и части головы пользователя, основываясь на предоставленной информации.
Когда пользователь прижимает стригущее устройство 20 к голове пользователя и передвигает это устройство по голове пользователя, система 10 способна определять относительные положения стригущего устройства 20 по отношению к части тела, подлежащей обработке, основываясь на данных изображения, генерируемых камерой 30 применительно к части тела и стригущему устройству. Контроллер 40 принимает данные от камеры 30, и контроллер 40 выполняется с возможностью регулировки рабочих характеристик в ответ на принятые данные. В этом варианте осуществления рабочей характеристикой является расстояние между стригущим блоком 24 и направляющей поверхностью 26.
Хотя в настоящем варианте осуществления рабочая характеристика, которая изменяется контроллером 40, является расстоянием между стригущим блоком 24 и направляющей поверхностью 26, должно быть понятно, что другие рабочие характеристики стригущего устройства 20 могут также изменяться. Должно быть понятно, что вторая рабочая характеристика устройства, которая изменяется, зависит от цели и функционального назначения устройства и изобретения, как определено в формуле изобретения, и не ограничивается каким-либо конкретным типом устройства для обработки волос и/или кожи. Поэтому контроллер может быть выполнен с возможностью изменения любой характеристики устройства в зависимости от информации, генерируемой модулем формирования изображений.
Контроллер 40 выполнен с возможностью обращения к эталонному профилю части тела, подлежащей обработке. Эталонный профиль может быть запомнен в справочной таблице. Эталонный профиль может быть запомнен в памяти 100. При таком выполнении контроллер 40 выполняется с возможностью обращения к памяти 100, чтобы получить доступ к эталонному профилю.
Эталонный профиль обеспечивает информацию о желаемой установке значения для рабочей характеристики, которая будет изменяться контроллером, в этом случае для расстояния между стригущим блоком 24 и направляющей поверхностью 26, применительно к каждому положению стригущего устройства 20 относительно части тела, подлежащей обработке. Такая информация сообщается и запоминается со ссылкой на систему координат. Одна такая конфигурация использует полярную систему координат, в которой положение части тела, подлежащей обработке, определяется расстоянием от фиксированной точки и углом относительно фиксированного направления. Другая конфигурация использует прямоугольную систему координат. Для каждой точки задается состояние, такое как значение, рабочей характеристики. Альтернативно эталонный профиль может определять карту части тела пользователя, подлежащей обработке, которая подразделяется на заданные области, и состояние рабочей характеристики задается для каждой области.
Хотя в одном варианте выполнения каждое возможное положение может быть присвоенным состоянием рабочей характеристики, в альтернативном варианте осуществления ограниченное число положений присваивается состоянию, и контроллер 40 выполняется с возможностью экстраполяции и интерполяции состояния для других положений, основываясь на одном или более из заданного ограниченного числа положений. В таком варианте выполнения изменение в состоянии для определенного положения может быть ступенчатым изменением. Альтернативно контроллер 40 может конфигурировать изменение, чтобы оно было непрерывным и постепенным. Преимуществом такого подхода является то, что может быть обеспечена ровная стрижка волос.
Контроллер 40 выполняется с возможностью регулировки установочных значений для расстояния между стригущим блоком 24 и направляющей поверхностью 26, сравнивая предоставляемую информацию, указывающую положение обрабатывающего устройства относительно части тела, подлежащей обработке, с эталонной информацией, обеспечиваемой эталонным профилем, и регулируя расстояние между стригущим блоком 24 и направляющей поверхностью 26 для обеспечения соответствия эталонным данным.
Контроллер 40 управляет работой приводного элемента 28 для регулировки расстояния между стригущим блоком 24 и направляющей поверхностью 26. Так как стригущий блок 24 движется по части тела, подлежащей обработке, контроллер выполняется с возможностью изменения расстояния между стригущим блоком 24 и направляющей поверхностью 26 в зависимости от определенного положения стригущего устройства 20 по отношению к части тела, подлежащей обработке. Должно быть понятно, что как стригущий блок 24, так и направляющая поверхность 26 будут иметь рабочую зону, по которой будет производиться обработка. То есть стригущий блок 24 будет иметь рабочую зону, которая при расположении над секцией части тела, подлежащей обработке, будет вызывать обработку, например, стрижку волос, на упомянутой секции. Поэтому зона обработки может перекрывать два или более положений, имеющих разные желаемые состояния первой рабочей характеристики. Для того чтобы помочь в предотвращении нежелательной обработки, такой как слишком короткая стрижка волос, в такой ситуации контроллер 40 выполняется с возможностью выбора состояния, ближайшего к состоянию по умолчанию. Например, в настоящем варианте осуществления контроллер 40 выполнен с возможностью выбора наибольшего расстояния между стригущим блоком 24 и направляющей поверхностью 26, обеспечиваемого двумя или более желаемыми состояниями. Другое состояние или состояния будут впоследствии встречаться при повторяющихся, но слегка отличающихся, проходах стригущего устройства 20 по части тела, подлежащей обработке.
После того как полный проход по части тела, подлежащей обработке, будет завершен, пользователь может убрать стригущее устройство 20 с части тела, подлежащей обработке. Должно быть понятно, что стригущее устройство 20 может быть отодвинуто от части тела, подлежащей обработке, во время обработки, и система 10 будет способна продолжить работу, когда стригущее устройство 20 будет возвращено по направлению к части тела, подлежащей обработке.
Хотя в описанном выше варианте осуществления используется один эталонный профиль, должно быть понятно, что контроллер 40 может быть выполнен с возможностью выбора из двух или более эталонных профилей в ответ на ввод от пользователя или в ответ на информацию, генерируемую камерой, основанную на изображении части тела. Например, контроллер 40 может быть выполнен с возможностью выбора эталонного профиля, основываясь на размере головы пользователя, определенном камерой 30.
В альтернативном варианте осуществления, не показанном на чертежах, контроллер не регулирует работу приводного элемента в зависимости от информации, генерируемой модулем формирования изображений, но вместо этого информирует пользователя стригущего устройства через один или более модулей обратной связи, например, через динамик 120 и/или дисплей 130. Например, когда стригущее устройство находится в работе, контроллер будет изменять рабочую характеристику устройства обратной связи, чтобы информировать пользователя в зависимости от информации, генерируемой модулем формирования изображений, с тем чтобы он мог предпринять соответствующее действие. Модуль обратной связи может обеспечивать акустический сигнал в форме слышимого звука, такого как короткие тональные посылки. Альтернативно модуль обратной связи может обеспечивать тактильную обратную связь в форме вибрации, которая ощущается пользователем через рукоятку устройства. Альтернативно модуль обратно связи может обеспечивать оптический сигнал, такой как мигающий свет или другой оптический индикатор. Должно быть понятно, что модуль обратной связи может также обеспечивать более чем один из упомянутых выше сигналов в зависимости от информации, генерируемой модулем формирования изображений.
Хотя в описанных выше вариантах осуществления камера является камерой глубины, должно быть понятно, что могут быть использованы альтернативные модули формирования изображений. Например, может быть использована альтернативная видеосистема, действующая в качестве модуля формирования изображений. Такая альтернативная видеосистема может включать в себя недиапазонную камеру, например, использующую технику восстановление объекта или стереоскопическое видение, временной анализ, анализ видео для восстановления диапазонных данных и обнаружения положения головы и положения стригущего устройства, анализ изображений тепловизионной камеры, анализ данных от ультразвуковых датчиков и/или анализ данных от емкостных датчиков.
Хотя в представленных выше вариантах осуществления система и способ описаны как система для стрижки волос на части тела и способ стрижки волос на части тела, должно быть понятно, что изобретение не ограничивается этим. Например, система и способ могут быть использованы для альтернативной обработки части тела, подлежащей обработке. Рабочая характеристика, которая изменяется в зависимости от информации, генерируемой модулем формирования изображений, будет зависеть от цели и функционального назначения устройства.
Должно быть понятно, что система и/или способ, как они определены в формуле изобретения, могут быть использованы для любого способа обработки волос или кожи. Например, устройство может быть эпилятором, бритвой, триммером, средством для отшелушивания, лазерным устройством для стрижки волос, увлажнителем или другим снабженным приводом устройством, которое взаимодействует с волосами и/или кожей пользователя. Альтернативно устройство может наносить вещество, такое как красящее вещество, шампунь, лекарственное или любое другое вещество на волосы или кожу пользователя. Возможные альтернативные варианты использования включает в себя системы, содержащие одно или более неинвазивных или инвазивных средств обработки, таких как зубная щетка, бритва, альтернативные типы удаления волос, отличающихся от стрижки, очистку кожи, загорание кожи и/или омолаживание кожи. В таких вариантах осуществления обработка части тела может включать в себя применение света, применение жидких косметических средств или других текучих сред, и/или пунктирование.
Устройство может иметь два или более стригущих блоков. В таком варианте построения контроллер может быть выполнен с возможностью регулировки рабочей характеристики разных стригущих блоков разными путями. Например, в построении с двумя стригущими блоками длина стрижки одним из стригущих блоков может изменяться независимо от другого стригущего блока. Поэтому должно быть понятно, что существует много путей, в которых контроллер способен регулировать рабочую характеристику устройства, имеющего несколько стригущих блоков.
Следует понимать, что термин “содержащий” не исключает другие устройства или этапы и что артикль единственного числа (“a” или “an” в оригинале) не исключает множественности. Простой факт, что определенные меры изложены во взаимно отличающихся зависимых пунктах формулы изобретения, не означает, что сочетание этих мер не может быть использовано для обеспечения преимущества. Любые ссылочные позиции в формуле изобретения не должны восприниматься как ограничивающие объем этой формулы изобретения.
Хотя пункты формулы изобретения были сформулированы в этой заявке применительно к конкретным сочетаниям признаков, должно быть понятно, что объем описания настоящего изобретения также включает в себя любые новые признаки или любые новые сочетания признаков, раскрытых здесь либо явно, либо косвенно, или любое обобщение их, независимо от того, относятся ли они к тому же изобретению, которое заявлено в любом пункте формулы изобретения, и смягчают ли они любую или все из тех же технических проблем, как это делает исходное изобретение. Заявители настоящим извещают, что новые пункты формулы изобретения могут быть сформулированы применительно к таким признакам и/или сочетаниям признаков во время рассмотрения настоящей заявки или любой последующей заявки, вытекающей из нее.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЯМИ ПОЛЬЗОВАТЕЛЯ ВО ВРЕМЯ ПРОЦЕДУРЫ БРИТЬЯ | 2014 |
|
RU2665443C2 |
| СИСТЕМА И СПОСОБ ОБРАБОТКИ ЧАСТИ ТЕЛА | 2017 |
|
RU2739921C2 |
| СИСТЕМА И СПОСОБ ОБРАБОТКИ ЧАСТИ ТЕЛА ЧЕЛОВЕКА | 2015 |
|
RU2752387C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЧАСТИ ТЕЛА ЧЕЛОВЕКА | 2015 |
|
RU2690733C2 |
| УПРАВЛЕНИЕ УСТРОЙСТВОМ ДЛЯ ЛИЧНОЙ ГИГИЕНЫ | 2018 |
|
RU2753175C2 |
| СЛЕЖЕНИЕ ЗА ПОЛОЖЕНИЕМ ДЛЯ СИСТЕМЫ ОБРАБОТКИ ВОЛОС | 2017 |
|
RU2745622C2 |
| СИСТЕМА ОБРАБОТКИ КОЖИ | 2015 |
|
RU2675458C2 |
| ГЕНЕРИРОВАНИЕ ИНДИКАТОРА НАВЕДЕНИЯ И СИГНАЛА ИНДИКАТОРА | 2017 |
|
RU2731206C2 |
| КОМПЛЕКТ ЛЕЗВИЙ, ПРИБОР ДЛЯ СТРИЖКИ ВОЛОС И СООТВЕТСТВУЮЩИЙ СПОСОБ ИЗГОТОВЛЕНИЯ | 2015 |
|
RU2689248C2 |
| СВЯЗУЮЩИЙ БЛОК И ПРИСПОСОБЛЕНИЕ ДЛЯ СТРИЖКИ ВОЛОС | 2014 |
|
RU2674052C1 |

Изобретение относится к области систем для стрижки волос. Система для стрижки волос содержит стригущее устройство со стригущим блоком, модуль формирования изображений, направляющую поверхность и контроллер. Модуль формирования изображений генерирует информацию, указывающую на положение стригущего устройства по отношению к части тела, подлежащей обработке. Направляющая поверхность выполнена с возможностью отдаления стригущего устройства от части тела, подлежащей обработке. Контроллер изменяет расстояние между стригущим устройством и направляющей поверхностью в зависимости от информации, генерируемой модулем формирования изображений. Изобретение также относится к способу стрижки волос с использованием системы для стрижки волос. Техническим результатом изобретения является улучшение качества стрижки волос. 2 н. и 13 з.п. ф-лы, 3 ил.
1. Система для стрижки волос, содержащая стригущее устройство, имеющее стригущий блок, модуль формирования изображений, выполненный с возможностью генерации информации, указывающей положение стригущего устройства по отношению к части тела, подлежащей обработке, на основе изображения части тела и стригущего устройства, и направляющую поверхность, выполненную с возможностью отдаления стригущего устройства от части тела, подлежащей обработке, и контроллер, выполненный с возможностью изменения расстояния между стригущим устройством и направляющей поверхностью в зависимости от информации, генерируемой модулем формирования изображений.
2. Система (10) по п. 1, которая для обработки части тела, подлежащей обработке, является системой для стрижки волос на части тела, подлежащей обработке, а обрабатывающее устройство (20) является стригущим устройством и обрабатывающий блок (24) является стригущим блоком.
3. Система (10) по п. 1 или 2, в которой обрабатывающее устройство содержит основной корпус (21), направляющую поверхность (26), находящуюся на основном корпусе, и обрабатывающий блок (24), способный перемещаться по отношению к основному корпусу для регулировки расстояния между направляющей поверхностью и обрабатывающим блоком.
4. Система (10) по п. 1 или 2, в которой обрабатывающее устройство содержит основной корпус (21), обрабатывающий блок (24), находящийся в основном корпусе (21), и направляющую поверхность (26), способную перемещаться по отношению к основному корпусу для регулировки расстояния между направляющей поверхностью и обрабатывающим блоком.
5. Система (10) по п. 1 или 2, в которой обрабатывающий блок (24) дополнительно содержит приводной элемент (28) и в которой контроллер (40) выполнен с возможностью регулировки приводного элемента в зависимости от информации, генерируемой модулем (30) формирования изображений, для изменения расстояния между обрабатывающим блоком и направляющей поверхностью (26).
6. Система (10) по п. 1 или 2, в которой изображение части тела и обрабатывающего устройства (20) является изображением части тела, подлежащей обработке, и обрабатывающего устройства.
7. Система (10) по п. 1 или 2, в которой изображение части тела и обрабатывающего устройства (20) является изображением головы (81) пользователя и обрабатывающего устройства и в которой модуль (30) формирования изображений выполнен с возможностью обнаружения направления взгляда пользователя, основываясь на изображении головы пользователя и обрабатывающего устройства.
8. Система (10) по п. 7, в которой модуль (30) формирования изображений выполнен с возможностью обнаружения направления взгляда пользователя, основываясь на обнаружении одного или более объектов в изображении головы (81) пользователя и обрабатывающего устройства и основываясь на обнаружении носа и/или ушей пользователя в изображении головы пользователя и обрабатывающего устройства.
9. Система (10) по п. 1 или 2, дополнительно содержащая инерциальный измерительный блок (150), выполненный с возможностью генерации информации, указывающей положение обрабатывающего устройства (20).
10. Система (10) по п. 9, в которой контроллер (40) выполнен с возможностью изменения расстояния между обрабатывающим блоком (24) и направляющей поверхностью (26) в зависимости от информации, генерируемой модулем (30) формирования изображений и инерциальным измерительным блоком (150).
11. Система (10) по п. 9, в которой контроллер (40) выполнен с возможностью калибровки инерциального измерительного модуля (150), основываясь на информации, генерируемой модулем (30) формирования изображений.
12. Система (10) по п. 1 или 2, в которой модуль (30) формирования изображений выполнен с возможностью генерации информации, указывающей ориентацию обрабатывающего устройства (20) относительно части тела, подлежащей обработке, основываясь на изображении части тела и обрабатывающего устройства.
13. Система (10) по п. 1 или 2, в которой контроллер (40) выполнен с возможностью определения расстояния между обрабатывающим блоком (24) и направляющей поверхностью (26) в относительном положении, основываясь на заданном расстоянии между обрабатывающим блоком и направляющей поверхностью в этом относительном положении.
14. Система (10) по п. 1 или 2, в которой расстояние между обрабатывающим блоком (24) и направляющей поверхностью (26) является первой рабочей характеристикой, на возможность изменения которой настроен контроллер (40), причем контроллер выполнен с возможностью изменения второй рабочей характеристики обрабатывающего устройства (20) в зависимости от информации, генерируемой модулем формирования изображений.
15. Способ стрижки волос с использованием системы для стрижки волос по п. 1, включающий генерацию информации, указывающей положение стригущего устройства по отношению к части тела, подлежащей обработке, на основе изображения части тела и стригущего устройства, с использованием модуля формирования изображений и изменение расстояния между стригущим блоком и направляющей поверхностью, выполненной с возможностью отдаления стригущего блока от части тела, подлежащей обработке, в зависимости от информации, генерируемой модулем формирования изображений.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| RU 2008135061 A, 10.03.2010 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

