Изобретение относится к области технической диагностики и может быть использовано для определения неработоспособного генераторного агрегата (ГА) в судовых электростанциях.
Известен способ (Широков Н.В. Предупредительное управление судовой электроэнергетической системой при отказе источников электроэнергии / Н.В.Широков // Вестник Государственного университета морского и речного флота имени адмирала С.О. Макарова. - 2019. - №2(54). - С. 396-405. DOI: 10/21821/2309-5180-2019-11-2-396-405), согласно которому идентификация неработоспособного ГА осуществляется непосредственно в момент его перехода в двигательный режим работы при условии, что в электроэнергетической системе не происходят процессы, при которых работоспособный агрегат на время может перейти в двигательный режим работы (например, включение одного из ГА на параллельную работу или рекуперативное торможение при опускании груза).
Способ предполагает идентификацию неработоспособного состояния ГА без выдержки времени, что позволяет существенно сократить время диагностирования. Однако для его реализации требуется информация о режиме работы многих элементов системы (например, о замыкании контактов контакторов рекуперативного торможения), что на практике приводит к необходимости прокладки дополнительных кабельных линий, длина которых на крупных судах может достигать нескольких сот метров. Это существенно удорожает применение данного подхода.
Наиболее близким к предлагаемому изобретению относится способ определения неработоспособного генераторного агрегата по патенту № 2686103 от 24.04.2019, согласно которому при параллельной работе нескольких ГА измеряют загрузку каждого из ГА, определяют величину неравномерности загрузки генераторных агрегатов и определяют момент отклонения последней за установленные пределы допуска, определяют момент перехода ГА в двигательный режим и при совпадении этого момента с моментом отклонения неравномерности загрузки генераторных агрегатов за пределы допуска, ГА, перешедший в двигательный режим, признается неработоспособным.
Данный способ в целом обеспечивает определение неработоспособного ГА при параллельной работе нескольких генераторных агрегатов, за исключением случаев выхода из строя системы автоматического распределения нагрузок параллельно работающих ГА, входящей в систему управления судовой электростанцией.
Заявляемый способ позволяет повысить достоверность определения неработоспособного ГА при его параллельной работе с другими агрегатами в случае выхода из строя системы автоматического распределения нагрузок параллельно работающих ГА.
Для решения указанной проблемы используется следующая совокупность существенных признаков: в способе определения неработоспособного ГА заключающемся в том, что при параллельной работе нескольких ГА определяют интервал времени (Δt), в течение которого неравномерность загрузки генераторных агрегатов превосходит допустимое значение, сравнивают его значение с заданной величиной (Δtзад), определяют момент, при котором неравномерность загрузки генераторных агрегатов превосходит допустимое значение и осуществляется переход ГА в двигательный режим и, если при этом выполняется условие Δt≤Δtзад, то ГА, перешедший в двигательный режим, определяют как неработоспособный.
Сущность изобретения заключается в том, что используемый в прототипе диагностический параметр - отклонение разности загрузок ГА за установленные пределы, характеризует не только выход ГА из строя, но и переход в неработоспособное состояние системы автоматического распределения нагрузок параллельно работающих ГА (САРН). Если автоматика выйдет из строя по причине постепенного отказа САРН, которая при этом продолжает функционировать, то разность в загрузке агрегатов будет превышать допустимую величину и, в случае перехода в двигательный режим исправного ГА, использование способа, принятого за прототип, приведет к ошибке в диагностировании первого рода - признанию работоспособного ГА неработоспособным. В предлагаемом способе для идентификации неработоспособного состояния ГА необходимо, чтобы в момент его перехода в двигательный режим время, в течение которого неравномерность загрузки генераторных агрегатов превосходила допустимое значение Δt, было меньше заданной величины Δtзад.
Если при использовании предлагаемого способа неравномерность распределения загрузки ГА превысит допустимое значение вследствие выхода из строя САРН, то через время Δtзад идентификация технического состояния ГА, перешедшего в двигательный режим, блокируется. В этом случае исправный агрегат, перешедший в двигательный режим, признан не будет неработоспособным. Вероятность одновременного отказа САРН и ГА, перешедшего в двигательный режим, крайне мала, стремится к нулю и в практическом использовании может не рассматриваться.
Величина Δtзад определяется как наибольшее значение из двух величин - Δtдин и Δtразгр. При этом Δtдин - время, необходимое для восстановления заданной величины неравномерности загрузок ГА работоспособной САРН в динамичных режимах при набросе-сбросе нагрузки. Для судовых электроэнергетических систем эта величина определяется Правилами Российского Морского Регистра Судоходства и составляет 5 секунд. Δtразгр - максимальное время, за которое перешедший в неработоспособное состояние ГА полностью разгружается и переходит в двигательный режим. Эта величина определяется для каждого агрегата эмпирически, но, как правило, не превышает 20 секунд, хотя в отдельных случаях она меньше, чем Δtдин.
Если при использовании предлагаемого способа неравномерность распределения загрузки ГА превысит допустимое значение вследствие выхода из строя генераторного агрегата, то он полностью разгрузится и перейдет в двигательный режим за время, меньшее, чем Δtзад. При этом будут выполнены все условия идентификации неработоспособного состояния ГА, определенные предлагаемым изобретением: ГА перешел в двигательный режим и время, в течение которого неравномерность распределения загрузки ГА превышает допустимое значение, не превосходит заданное значение (Δt ≤ Δtзад), неработоспособный агрегат будет признан неработоспособным.
Сопоставление предлагаемого способа и прототипа показало, что поставленная задача - повышение достоверности определения неработоспособного ГА - решается в результате новой совокупности признаков, что доказывает соответствие предлагаемого изобретения критерию патентоспособности «новизна».
В свою очередь, проведенный информационный поиск в области электроснабжения и технической диагностики не выявил решений, содержащих отдельные отличительные признаки заявляемого изобретения, что позволяет сделать вывод о соответствии способа критерию «изобретательский уровень».
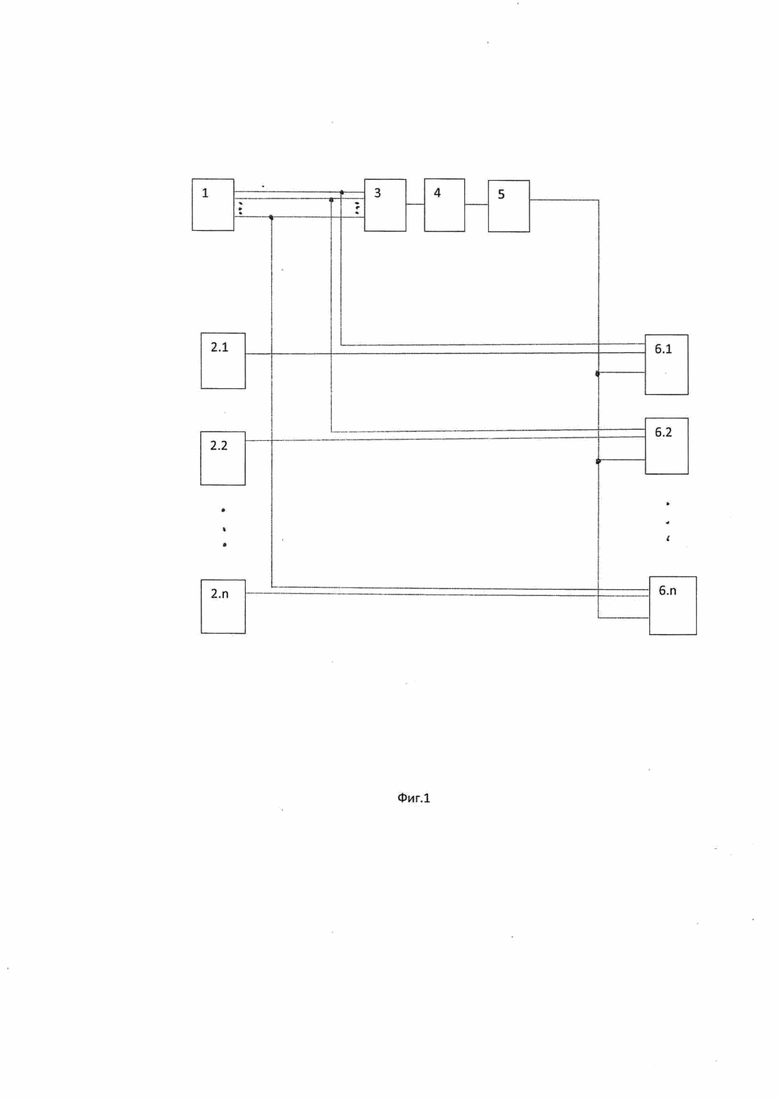
Сущность указанного способа поясняется чертежом (Фиг. 1), на котором представлена функциональная схема устройства, реализующего предлагаемый способ, на примере параллельной работы «n» ГА.
Устройство (Фиг. 1) содержит: блок контроля неравномерности загрузки ГА - 1, по числу ГА, блоки контроля перехода ГА в двигательный режим - 2.1, 2.2 … 2.n, логический элемент «ИЛИ» - 3, блок задержки - 4, логический элемент «НЕ» -5, по числу ГА логические элементы «И» -6.1, 6.2, …6.n; причем каждый из выходов блока 1 соединен с первыми входами соответствующих логических элементов «И» -6.1, 6.2, … 6.n и соответствующим входом логического элемента «ИЛИ» - 3; выход каждого из блоков контроля перехода ГА в двигательный режим - 2.1, 2.2 … 2.n соединен со вторым входом соответствующего логического элемента «И» » -6.1, 6.2, … 6.n; выход логического элемента «ИЛИ» 3соединен с входом блока задержки 4, выход которого соединен с входом логического элемента «НЕ» - 5, выход логического элемента «НЕ» - 5 соединен с третьими входами всех логических элементов «И» -6.1, 6.2, … 6.n.
Блок контроля неравномерности загрузки ГА - 1 измеряет загрузку каждого ГА, определяет неравномерность загрузки, сравнивает полученную величину с допустимым значением и формирует на соответствующем выходе сигнал логической «1» в случае, когда разность в загрузке работающих параллельно ГА оказывается вне зоны, установленной допуском, причем указанный сигнал появляется на выходе, соответствующем номеру ГА, имеющую наименьшую загрузку. Данный блок полностью аналогичен соответствующему блоку, представленному в прототипе. Блоки контроля перехода ГА в двигательный режим 2.1, 2.2 … 2n - выполнены в виде известных функциональных блоков, в качестве которых могут быть использованы датчики обратной активной мощности, датчики обратного активного тока, реле обратной мощности с отключенной цепью задержки и т.д., на выходе которых формируется сигнал логической «1» в случае перехода соответствующего ГА в двигательный режим (Лейкин B.C. Судовые электрические станции и сети. Учебник для мореходных и арктических училищ. - 3-e изд. перераб. и доп. - М: Транспорт, 1982 - 256. (стр. 178).
Логический элемент «ИЛИ» 3 - известный функциональный блок, формирующий на своем выходе сигнал логической «1» если хотя бы на один из его входов поступил сигнал логической «1».
Блок задержки 4 - известный функциональный блок, формирующий на своем выходе сигнал логической «1» через время, равное 
Логический элемент «НЕ» 5 - известный функциональный блок, на выходе которого появляется сигнал логической «1», если на его вход поступает сигнал логического «0» и, если на его вход подается сигнал логической «1», то на его выходе - сигнал логического «0».
Логические элементы «И» 6.1, 6.2, … 6n - известные функциональные блоки, которые формируют на своих выходах сигналы логической «1», если на все их входы поступили сигналы логической «1».
Устройство, реализующее предлагаемый способ определения неработоспособного ГА, функциональная схема которого представлена на Фиг.1 работает следующим образом. Допустим, что при параллельной работе один из ГА, например j-ый, перешел в двигательный режим (например, вышла из строя система подачи топлива в дизель j-ro ГА). При этом на выходе j -го блока контроля перехода ГА в двигательный режим 2.j появится сигнал логической «1» и поступит на второй вход соответствующего логического элемента «И» 6.j. Так как при переходе j-го ГА в двигательный режим вся его нагрузка перераспределяется между оставшимися в генераторном режиме ГА, то их нагрузка существенно возрастет и превысит величину установленного допуска и при этом на j-ом выходе блока 1 контроля неравномерности загрузки ГА появится сигнал логической «1» и поступит на первый вход соответствующего логического элемента «И» 6.j и j - ый вход логического элемента «ИЛИ» 3, на выходе которого также появится сигнал логической «1» и поступит на вход блока задержки 4.Сигнал логической «1» на выходе блока задержки появится только через время Δtзад, а до этого момента на его выходе и входе логического элемента «НЕ» 5 фиксирован сигнал логического «0». При этом на выходе логического элемента «НЕ» 5 и третьих входах всех логических элементов «И» 6.1, 6.2, … 6n - сигнал логической «1». Так как на все три входа логического элемента «И» 6.j поступает сигнал логической «1» то и на его выходе также формируется сигнал логической «1», информирующий о неработоспособном состоянии j-го ГА.
В случае, если переход j-го ГА в двигательный режим произойдет не по причине выхода его из работоспособного состояния, а из-за рекуперации в сеть энергии от одного из потребителей электрической энергии (например, при работе грузовой лебедки), то на выходе j-го блока контроля перехода ГА в двигательный режим 2.j также появится сигнал логической «1» и поступит на второй вход соответствующего логического элемента «И» 6.j Однако, так как при рекуперации энергии в сеть все остальные ГА, работающие параллельно, тоже разгружаются, то величина неравномерности загрузки ГА будет меньше допустимой величины уставки. В этом случае на соответствующем j-ом выходе блока 1 контроля неравномерности загрузки ГА появится сигнал логического «0» и поступит на первый вход соответствующего логического элемента «И» 6.j, на выходе которого сохранится сигнал логического «0» что свидетельствует о том, что неработоспособных ГА нет.
Предположим, что при работоспособном состоянии всех агрегатов вышла из строя система распределения активных нагрузок параллельно работающих ГА и разность нагрузок генераторов превысила допустимую величину. В этом случае на j-ом выходе блока 1 контроля неравномерности загрузки ГА появится сигнал логической «1» и поступит на первый вход соответствующего логического элемента «И» 6.j и j - ый вход логического элемента «ИЛИ» 3, на выходе которого также появится сигнал логической «1» и поступит на вход блока задержки 4. Через время Δtзад на выходе блока задержки 4 сформируется сигнал логической «1», информирующий о неисправности системы автоматического распределения активных нагрузок, который поступит на вход логического элемента «НЕ»5. На выходе логического элемента «НЕ»5 появится сигнал логического «0» и поступит на третьи входы всех логических элементов «И» 6.1, 6.2, … 6n, заблокировав идентификацию неработоспособного состояния ГА. Если при этом произойдет, например, рекуперация электроэнергии в сеть и j-ый ГА перейдет в двигательный режим, то сигнал логической «1» появится на выходе блока 2.j и поступит на второй вход логического элемента «И» 6.j. Так как на первый и второй входы логического элемента «И» 6.j поступил сигнал логической «1», а на третий вход - сигнал логического «0», то на его выходе - сигнал логического «0», свидетельствующий о работоспособном состоянии перешедшего в двигательный режим j - го ГА. Применение способа, принятого за прототип, приведет к ошибочной идентификации неработоспособного состояния ГА, работающего с обратной мощностью, что может привести к неправомерному отключению его защитой.
Пример практической реализации способа.
В качестве примера применения способа рассмотрим работу судовой электростанции в составе двух дизель-генераторов ДГ1 и ДГ2 с номинальной мощностью по 100 кВт каждый. Пусть при параллельной работе данных ГА нагрузка ДГ1 составит 25кВт, а нагрузка ДГ2 составит 20кВт. Требуемая точность распределения активных нагрузок (Ртр) составляет 10% от номинальной мощности ДГ, то есть Ртр = 10 кВт в данном случае, а мощность, потребляемая ДГ в двигательном режиме (Рпот.) составляет 16% от его номинальной мощности, то есть Рпот.=16 кВт. Допустимое значение неравномерности загрузки генераторных агрегатов (Рдоп) следует принять несколько большим, чем Ртр, но меньшим, чем Рпот, например, равным 14 кВт для данного случая. Допустим, что время Δtзад для данной системы составляет 12 секунд. Пусть система распределения активных нагрузок работоспособна и произошла потеря работоспособности первичного двигателя ДГ2, вызванная несанкционированным срабатыванием воздушной захлопки и прекращением поступления воздуха в дизель. В этом случае ДГ2 переходит в двигательный режим и вся нагрузка электростанции в 45 кВт поступает на ДГ1 в течение 1 секунды (Δt < 1с). Устройство, реализующее предлагаемый способ, функциональная схема которого представлена на Фиг.1, работает следующим образом. Блок 1 контроля неравномерности загрузки ГА определяет момент, когда разность загрузок ДГ1 и ДГ2 превысит допустимое значение в 14 кВт и при этом на втором своем выходе формирует сигнал логической «1». Этот сигнал поступает на первый вход логического элемента «И» 6.2 и второй вход логического элемента «ИЛИ»3, на выходе которого появляется сигнал логической «1» и поступает на вход блока задержки 4. Сигнал логической «1» на выходе блока задержки 4 появится только через время Δtзад = 12с, а пока на его выходе - сохраняется сигнал логического «0», который поступает на вход логического элемента «НЕ» 5. На выходе логического элемента «НЕ» 5 - фиксирован сигнал логической «1», который поступает на третьи входы логических элементов «И» 6.1 и 6.2. В течение 1с ДГ2 переходит в двигательный режим и на выходе блока контроля перехода ГА в двигательный режим 2.2 появится сигнал логической «1» и поступит на второй вход логического элемента «И» 6.2. Так как на все три входа логического элемента «И» 6.2 поступил сигнал логической «1», то на его выходе - тоже формируется сигнал логической «1», информирующий о неработоспособном состоянии ДГ2. Согласно предлагаемому способу посредством блока 1 определяют интервал времени (Δt < 1с), в течение которого неравномерность загрузки генераторных агрегатов превосходит допустимое значение, при помощи блока задержки 4 сравнивают его значение с заданной величиной (Δtзад = 12с), блок 2.2 определяет момент перехода ДГ2 в двигательный режим и, так как выполняется условие Δt ≤ Δtзад, то посредством логического элемента «И»6.2 перешедший в двигательный режим ДГ2 определяют как неработоспособный.
Предположим, что в процессе эксплуатации вышла из строя система управления электростанцией вследствие неисправности системы автоматического распределения активных нагрузок параллельно работающих ГА и нагрузка ДГ1 составила 35 кВт, а нагрузка ГА2 составила 10 кВт. Согласно предлагаемому способу устройство, функциональная схема которого представлена на Фиг.1, работает следующим образом. Блок 1 контроля неравномерности загрузки ГА определяет момент, когда разность загрузок ДГ1 и ДГ2 превысит допустимое значение в 14 кВт и при этом на втором своем выходе формирует сигнал логической «1». Этот сигнал поступает на первый вход логического элемента «И» 6.2 и второй вход логического элемента «ИЛИ»3, на выходе которого появляется сигнал логической «1» и поступает на вход блока задержки 4. Так как ДГ1 и ДГ2 работоспособны и работают в генераторном режиме, то через время Δtзад = 12с на выходе блока задержки 4 появится сигнал логической «1» и поступит на вход логического элемента «НЕ»5. На выходе логического элемента «НЕ» 5 формируется сигнал логического «0», который поступает на третьи входы логических элементов «И» 6.1 и 6.2, блокируя процесс идентификации неработоспособного состояния ГА. Если при этом работоспособный ДГ2 перейдет в двигательный режим (например, в результате рекуперации энергии в сеть при торможении грузовой лебедки), то на выходе блока контроля перехода ГА в двигательный режим 2.2 появится сигнал логической «1» и поступит на второй вход логического элемента «И» 6.2. Но так как на третий вход логического элемента «И»6.2 поступает сигнал логического «0», то техническое состояние ДГ2 неработоспособным признано не будет. В данном случае не выполняется один из существенных признаков изобретения, а именно: неравномерность загрузки генераторных агрегатов превосходит допустимое значение дольше, чем следует для идентификации неработоспособного состояния ГА, условие Δt ≤ Δtзад не выполняется. В этом случае агрегат, перешедший в двигательный режим, не определяют как неработоспособный. При применении способа, принятого за прототип, работоспособный ГА будет признан неработоспособным.
Предлагаемое изобретение было создано в составе научно-исследовательских работ, проводимых на кафедре Электропривода и электрооборудования береговых установок ФБГОУ ВО «Государственного университета морского и речного флота имени адмирала С.О. Макарова». Были произведены расчеты, показавшие возможность использования заявляемого способа в судовых энергетических установках и электроэнергетических системах, что с учетом выше изложенного позволяет сделать вывод о возможности его промышленного применения.
Использование: в области электротехники для определения неработоспособного генераторного агрегата (ГА) в судовых электростанциях. Технический результат - повышение достоверности диагностирования. Согласно способу определения неработоспособного ГА при параллельной работе нескольких ГА определяют интервал времени (Δt), в течение которого неравномерность загрузки генераторных агрегатов превосходит допустимое значение, сравнивают его значение с заданной величиной (Δtзад), определяют момент, при котором неравномерность загрузки генераторных агрегатов превосходит допустимое значение и осуществляется переход ГА в двигательный режим, и если при этом выполняется условие Δt ≤ Δtзад, то ГА, перешедший в двигательный режим, определяют как неработоспособный. 1 з.п. ф-лы, 1 ил.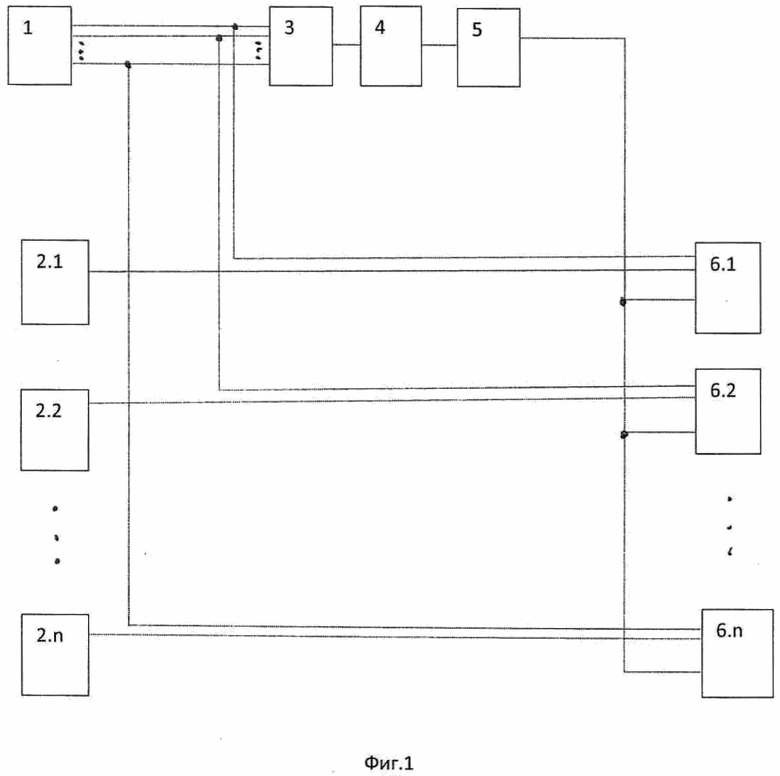
1. Способ определения неработоспособного генераторного агрегата (ГА) при параллельной работе нескольких ГА, при котором определяют интервал времени (Δt), в течение которого неравномерность загрузки генераторных агрегатов превосходит допустимое значение, сравнивают его значение с заданной величиной (Δtзад), определяют момент, при котором неравномерность загрузки генераторных агрегатов превосходит допустимое значение и осуществляется переход ГА в двигательный режим, и если при этом выполняется условие Δt ≤ Δtзад, то ГА, перешедший в двигательный режим, определяют как неработоспособный.
2. Способ определения неработоспособного генераторного агрегата (ГА) по п.1, отличающийся тем, что для его осуществления используется устройство, содержащее: блок контроля неравномерности загрузки ГА, по числу ГА, блоки контроля перехода ГА в двигательный режим, логический элемент ИЛИ, блок задержки, логический элемент НЕ, по числу ГА логические элементы И; причем каждый из выходов блока контроля неравномерности загрузки ГА соединен с первыми входами соответствующих логических элементов И и с соответствующим входом логического элемента ИЛИ, выход каждого из блоков контроля перехода ГА в двигательный режим соединен со вторым входом соответствующего логического элемента И выход логического элемента ИЛИ соединен с входом блока задержки, выход которого соединен с входом логического элемента НЕ, выход логического элемента НЕ соединен с третьими входами всех логических элементов И.
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРАБОТОСПОСОБНОГО ГЕНЕРАТОРНОГО АГРЕГАТА | 2018 |
|
RU2686103C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРАБОТОСПОСОБНОГО ГЕНЕРАТОРНОГО АГРЕГАТА | 2019 |
|
RU2715555C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ РАЗГРУЗКИ ПАРАЛЛЕЛЬНО РАБОТАЮЩИХ ГЕНЕРАТОРНЫХ АГРЕГАТОВ | 2016 |
|
RU2623106C1 |
| WO 2016049384 A1, 31.03.2016 | |||
| WO 9718612 A1, 22.05.1997. | |||

