Изобретение относится к области электротехники и может быть использовано для защиты сети судовых электростанций.
Известен способ защиты сети автономной электростанции (А.С. SU 1653517, Н02Н 3/00, H02J 9/00 опубл 1991 г.), согласно которому при параллельной работе нескольких источников электроэнергии измеряют частоту и (или) напряжение сети, сравнивают их с уставкой и при превышении любого из заданных параметров уставки формируют первый сигнал на отключение, измеряют загрузку каждого источника электроэнергии, определяют величину неравномерности загрузки источников электроэнергии и при отклонении последней за установленные пределы уставки формируют второй сигнал на отключение, при совпадении которого с первым сигналом на отключение отключают тот источник электроэнергии, загрузка которого оказывается наименьшей.
Данный способ в целом обеспечивает защиту сети автономной электростанции при параллельной работе нескольких генераторных агрегатов (ГА), но так как отключение неработоспособного ГА осуществляется при отклонении частоты и (или) напряжения сети за пределы уставки, то есть когда оставшиеся в работе ГА перегружены, то они не всегда обеспечивают восстановление указанных параметров сети за необходимое время, что на практике может вызвать остановку работоспособных ГА и обесточивание судна.
Наиболее близким к предлагаемому изобретению относится способ защиты сети автономной электростанции (Яковлев Г.С. Судовые электроэнергетические системы: Учебник - 5-e изд., перераб. и доп. - Ленинград, Судостроение, 1987. - 272 с. ил. (стр. 132), согласно которому при параллельной работе нескольких источников электроэнергии выявляют источник электроэнергии, перешедший в двигательный режим работы, и через выдержку времени отключают его от сети.
Способ в целом обеспечивает защиту сети автономной электростанции при параллельной работе нескольких ГА, но так как отключение неработоспособного ГА осуществляется не в момент отказа и перехода в двигательный режим, а с заранее заданной выдержкой времени, то данный способ допускает возможную перегрузку сети, что может вызвать остановку работоспособных ГА, обесточивание судна и потерю его управляемости. При этом величина выдержки времени определяется, как правило, временем рекуперации энергии в сеть при работе судовых кранов, грузовых лебедок и другой подъемно-транспортной техники на борту судна и может достигать, согласно Правилам Российского Морского Регистра Судоходства, 10 секунд (Правила классификации и постройки морских судов, 2016 г., с. 56, п. 8.2.4).
Недостаток способа - большое время отключения неработоспособного ГА и перегрузка сети.
Заявляемый способ позволяет решить проблему защиты сети автономной электростанции при параллельной работе нескольких ГА путем сокращения времени отключения неработоспособного источника электрической энергии от сети, что в свою очередь исключает возможность перегрузки сети и перерыва электроснабжения судна.
Для решения указанной проблемы используется следующая совокупность существенных признаков: в способе защиты сети автономной электростанции при параллельной работе нескольких ГА, заключающемся, как и прототип, в отключении от сети неработоспособного ГА, в отличие от прототипа дополнительно измеряют параметры, характеризующие мощность, вырабатываемую каждым из ГА, на основании результатов измерений определяют момент времени, при котором какой либо из ГА оказывается неработоспособным и при этом переходит в двигательный режим работы и отключают этот ГА от сети.
Сущность изобретения заключается в том, что отключение неработоспособного ГА осуществляется не через выдержку времени, определяемую длительностью переходных процессов, вызванных, например, рекуперацией в сеть мощности при работе подъемно-транспортного оборудования судна, а непосредственно в момент времени, когда ГА оказывается неработоспособным и перестает вырабатывать (развивать) мощность, превышающую собственные потери мощности ГА, то есть выходит из генераторного режима и переходит в двигательный режим работы. При этом существенно, что момент времени, при котором отключаемый ГА оказывается не способным работать в генераторном режиме определяется непосредственно по результатам контроля параметров, характеризующих мощность, развиваемую каждым из ГА, работающих параллельно. Этими параметрами могут быть нагрузка, принимаемая ГА, расход топлива или воздуха, но не давление смазочного масла или температура охлаждающей воды приводного двигателя, которые так же характеризуют работоспособность ГА. Отметим, что в данном случае перешедший в неработоспособное состояние ГА не сразу отключают от сети, а только тогда, когда он уже не способен генерировать хоть какую-нибудь мощность, что позволяет несколько растянуть процесс передачи нагрузки оставшимся работоспособными ГА и обеспечить возможность срабатывания других видов защит (например, своевременно отключить часть потребителей).
В общем случае в момент перехода ГА в двигательный режим неизвестно по какой причине произошло это событие - или вследствие неработоспособного состояния ГА или вследствие особого режима работы судовой электроэнергетической системы (СЭЭС), связанного, например, с рекуперацией энергии в сеть при работе грузовых механизмов судна. В связи с этим возможны два принципиально разных подхода, один из которых, как и прототип, заключается в блокировке отключения ГА, перешедшего в двигательный режим, на время указанного особого режима работы СЭЭС или на время, в течение которого этот режим может происходить. Другой подход - непосредственное определение технического состояния ГА, при котором он не может вырабатывать (развивать) мощность, превышающую свои внутренние потери на основании результатов измерений параметров, характеризующих величину мощности, вырабатываемой каждым из ГА, работающих параллельно, как в предлагаемом способе. Предлагаемое изобретение отличается от прототипа еще и тем, что его реализация не зависит от числа и параметров потребителей электроэнергии. В самом деле выдержка времени, задаваемая в прототипе определяется, например, временем рекуперации энергии в сеть грузовой лебедки, но если произойдет модернизация судна и будут установлены, например, вместо одной две грузовых лебедки разной мощности и другим временем рекуперации, то время выдержки при реализации прототипа придется менять в отличие от предложенного подхода, не зависящего от параметров потребителей энергии.
Предлагаемый способ предлагается к использованию в ситуации, когда источники электроэнергии уже работают параллельно, то есть переходные процессы, связанные с моментом включения их на параллельную работу, закончились.
Сопоставление предлагаемого способа и прототипа показало, что поставленная задача - сокращение времени определения неработоспособного источника электрической энергии и отключение его от сети - решается в результате новой совокупности признаков, что доказывает соответствие предлагаемого изобретения критерию патентоспособности «новизна».
В свою очередь, проведенный информационный поиск в области электроснабжения не выявил решений, содержащих отдельные отличительные признаки заявляемого изобретения, что позволяет сделать вывод о соответствии способа критерию «изобретательский уровень».
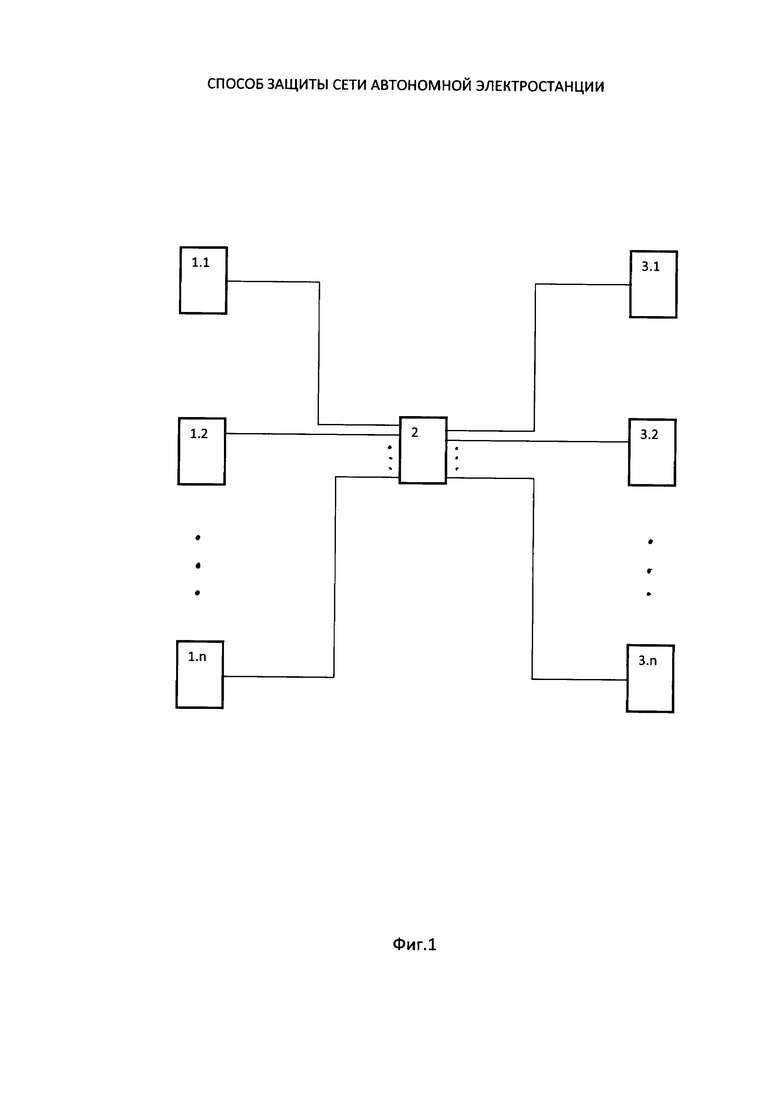
Сущность указанного способа поясняется чертежом, на котором (Фиг. 1) представлена функциональная схема устройства, реализующего предлагаемый способ на примере параллельной работы «n» ГА.
Устройство для защиты сети автономной электростанции, функциональная схема которого представлена на фиг. 1, содержит: по числу ГА датчики мощности ГА 1.1, 1.2…1.n, блок идентификации момента времени, при котором какой либо из ГА оказывается не способным и перестает вырабатывать (развивать) мощность, превышающую собственные потери мощности ГА - 2, по числу ГА блоки отключения ГА 3.1, 3.2…3.n, причем выходы датчиков мощности ГА 1.1, 1.2…1.n соединены с соответствующими входами блока идентификации момента времени, при котором какой либо из ГА оказывается не способным и перестает вырабатывать (развивать) мощность, превышающую собственные потери мощности ГА 2, соответствующие выходы которого соединены с входами соответствующих блоков отключения ГА 3.1, 3.2…3.n.
Датчики мощности ГА 1.1, 1.2…1.n - известные функциональные блоки, формирующие на своих выходах сигналы в виде напряжения постоянного тока, пропорционального величине мощности или тока для ГА постоянного тока и активной мощности или активного тока для ГА переменного тока; блок идентификации момента времени, при котором какой либо из ГА оказывается не способным и перестает вырабатывать (развивать) мощность, превышающую собственные потери мощности ГА 2 - новый функциональный блок, функциональная схема одной из возможных практических реализаций которого представлена на Фиг. 2, формирующий на соответствующем из своих выходов сигнал логической «1» в момент времени, когда соответствующий ГА оказывается не способным и перестает вырабатывать (развивать) мощность, превышающую собственные потери мощности ГА, именно в этот момент времени ГА неработоспособен и переходит в двигательный режим работы; блоки отключения ГА 3.1, 3.2…3.n - известные функциональные блоки, обеспечивающие отключение ГА от сети в случае поступления на их входы сигналов логической «1», в качестве этих функциональных блоков могут использоваться электромагнитные реле, размыкающие контакты которых включены в цепь катушки нулевой защиты (защиты от минимального напряжения) автоматического выключателя соответствующего ГА.
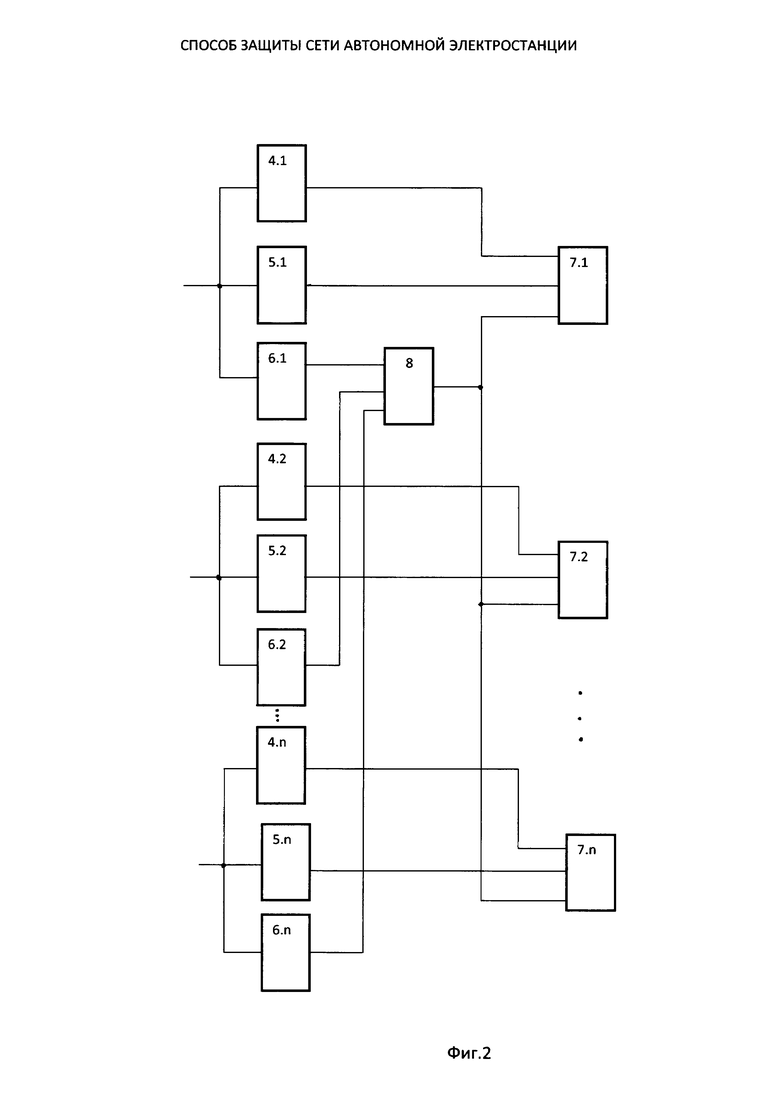
Блок идентификации момента времени, в котором какой либо из ГА оказывается не способным и перестает вырабатывать (развивать) мощность, превышающую собственные потери мощности (БИ), функциональная схема которого представлена на Фиг. 2 содержит по числу ГА: датчики перехода ГА в двигательный режим 4.1, 4.2…4.n, блоки контроля уменьшения мощности 5.1, 5.2…5.n, блоки контроля увеличения мощности 6.1, 6.2…6n, логические элементы «И» 7.1, 7.2…7.n, и логический элемент «ИЛИ» 8, при этом входы соответствующих датчиков перехода ГА в двигательный режим 3.1, 3.2…3.n соединены с входами соответствующих блоков контроля уменьшения мощности 5.1, 5.2…5.n, входами соответствующих блоков контроля увеличения мощности 6.1, 6.2…6n. и соответствующими входами блока БИ 2 (Фиг. 1); выходы соответствующих датчиков перехода ГА в двигательный режим 3.1, 3.2…3.n соединены с первыми входами соответствующих логических элементов «И» 7.1, 7.2…7.n, выходы блоков контроля уменьшения мощности 5.1, 5.2…5.n соединены со вторыми входами соответствующих логических элементов «И» 7.1, 7.2…7.n, выходы блоков контроля увеличения мощности 6.1, 6.2…6n соединены с соответствующими входами логического элемента «ИЛИ» 8, выход которого соединен с третьими входами логических элементов «И» 7.1, 7.2…7.n, выходы которых соединены с соответствующими выходами БИ 2 (Фиг. 1).
Датчики перехода ГА в двигательный режим 4.1, 4.2…4.n - известные функциональные блоки, в качестве которых могут быть использованы датчики обратной мощности или обратного тока для ГА постоянного тока и датчики обратной активной мощности и датчики обратного активного тока для ГА переменного тока с отключенной выдержкой времени, на выходе каждого из которых формируется сигнал логической «1» в случае перехода соответствующего ГА из генераторного в двигательный режим (Лейкин B.C. Судовые электрические станции и сети. Учебник для мореходных и арктических училищ. - 3-e изд. перераб. и доп. - М: Транспорт, 1982 - 256. (стр. 178) или схема компаратора, выполненная на операционном усилителе с опорным напряжением равным 0 В, формирующая на выходе сигнал логической «1», когда сигнал на ее входе переходит через ноль Вольт. Блоки контроля уменьшения мощности 5.1, 5.2…5.n, - известные функциональные блоки, на выходе каждого из которых появляется сигнал логической «1», когда сигнал в виде напряжения на входе уменьшается и сигнал логического нуля, если напряжение на входе не изменяется или увеличивается. Блоки контроля увеличения мощности соответствующих ГА 6.1, 6.2…6n. - известные функциональные блоки, на выходе каждого из которых появляется сигнал логической «1», когда сигнал в виде напряжения на входе увеличивается и сигнал логического нуля, если напряжение на входе не изменяется или уменьшается. В качестве этих блоков могут использоваться схемы на операционных усилителях (Воловиков В.А. Схемотехника электронных устройств судовой автоматики. Учебное пособие. - Л: ЛИВТ, 1986 г. - 101. (с. 24-25.). Логические элементы «И» 7.1, 7.2…7.n - известные функциональные блоки, на выходах которых формируются сигналы логической «1» только в случае, когда на всех их входах присутствуют сигналы логической «1». Логический элемент «ИЛИ» 8 - известный функциональный блок, на выходе которого появляется сигнал логической «1» только в том случае, когда хотя бы на один его вход поступает сигнал логической «1».
Сущность работы БИ, функциональная схема которого представлена на Фиг. 2 заключается в том, что определяют момент времени, в который мощность одного или нескольких ГА увеличивается, а мощность другого ГА уменьшается, при этом данный ГА переходит в двигательный режим работы и в этот момент формируют сигнал логической «1»
БИ, функциональная схема которого представлена на Фиг. 2 работает следующим образом. Предположим, что вышел из строя один из ГА, например j-ый, (допустим, что вышла из строя система подачи топлива в дизель j-го ГА). В этом случае топливо перестанет поступать, но в трубопроводе и фильтрах оно еще сохранится и дизель продолжит работать, хотя мощность, вырабатываемая j-ым ГА, начнет уменьшаться, нагрузка (или количество расходуемого топлива), которую он будет брать на себя, тоже будет уменьшаться, нагрузка (или количество расходуемого топлива), а значит и мощность оставшихся работоспособными ГА, будет увеличиваться. Сигналы, пропорциональные мощности каждого из ГА в виде напряжений поступают на соответствующие входы БИ. При этом, так как мощность j-го ГА уменьшается, то на выходе соответствующего блока контроля уменьшения мощности 5.j появится сигнал логической «1» и поступит на второй вход соответствующего логического элемента «И» 7.j. Так как нагрузка оставшихся работоспособными ГА будет увеличиваться, то на выходах блоков контроля увеличения мощности соответствующих ГА 6.1, 6.2…6n (кроме 6.j) появятся сигналы логической «1» и поступят на соответствующие входы логического элемента «ИЛИ» 8, на выходе которого появится сигнал логической «1» и поступит на третьи входы всех логических элементов «И» 7.1, 7.2…7.n. По мере того как количество топлива, поступающее в дизель j-го ГА будет уменьшаться будет уменьшаться и мощность, вырабатываемая j-ым ГА и в момент времени Т j окажется равной собственным потерям мощности j-го ГА (принимаемая нагрузка и генерируемая в сеть мощность j-го ГА будут равны нулю, он выйдет из генераторного режима), а затем окажется меньше, чем собственные потери мощности и j-ый ГА перейдет в двигательный режим, потребляя из сети недостающую часть мощности, необходимую для покрытия его собственных потерь. Так как это происходит на фоне уменьшения мощности, вырабатываемой ГА, то процесс выхода ГА из генераторного режима, полной разгрузки (мощность, отдаваемая в сеть, равна 0) и переход ГА в двигательный режим на практике можно считать происходящими одновременно, поэтому в качестве датчика перехода ГА в двигательный режим можно взять любой блок, обеспечивающий формирование сигнала логической «1» в виде импульса при прохождении входного сигнала через ноль. При переходе в двигательный режим j-го ГА на выходе датчика 4.j появится сигнал логической «1» и поступит на первый вход соответствующего логического элемента «И» 7.j. Так как на все три входа логического элемента «И» 7.j поступили сигналы логической «1», то и на ее выходе появляется сигнал логической «1» и поступает на j-ый выход БИ 2 (Фиг. 1), информируя о том, что j-ый ГА не способен и перестал вырабатывать (развивать) мощность, превышающую собственные потери мощности, что он неработоспособен и перешел в двигательный режим работы.
В случае если переход j-го ГА в двигательный режим произошел не по причине перехода в неработоспособное состояние, а, например, в результате работы грузовой лебедки с рекуперацией энергии в сеть, то в этом случае будут разгружаться все ГА, работающие параллельно, мощность ни одного из них не будет расти и на третьи входы всех логических элементов «И», в том числе и 7.j, c выходов блоков контроля увеличения мощности соответствующих ГА 6.1, 6.2…6n поступят сигналы логического «0», на выходах всех логических элементов «И» 7.1, 7.2…7.n, а значит и на всех выходах БИ2 (Фиг. 1) - сигналы логического «0», информирующие о том, что хотя переход j-го ГА в двигательный режим произошел и этот ГА перестал вырабатывать (развивать) мощность, превышающую собственные потери мощности, но он работоспособен и перейдет в генераторный режим работы при росте нагрузки после окончания процесса рекуперации энергии в сеть.
Устройство для защиты сети автономной электростанции (Фиг. 1) работает следующим образом. На выходах датчиков мощности ГА 1.1, 1.2…1.n формируются сигналы в виде напряжения постоянного тока, пропорциональные мощности, развиваемой соответствующими ГА. Эти сигналы поступают на соответствующие входы БИ 2. Допустим, что i-ый ГА перешел в неработоспособное состояние и начал снижать мощность, тогда мощность всех оставшихся ГА, работающих параллельно, начнет увеличиваться и на выходе датчика 1.i сигнал начнет уменьшаться, а на выходах всех остальных датчиков 1.1, 1.2…1.n - увеличиваться. Эти сигналы поступят на соответствующие входы БИ 2, который, после перехода i-го ГА в двигательный режим на своем i-ом выходе сформирует сигнал логической «1». Этот сигнал поступит на вход соответствующего блока отключения ГА 3.i, который отключит i-ый ГА.
В случае, если i-ый ГА снизил мощность и перешел в двигательный режим, оставаясь работоспособным, то все остальные ГА, работающие параллельно тоже снизят свою мощность. При этом на выходах всех датчиков мощности ГА 1.1, 1.2…1.n сигналы начнут уменьшаться и на выходах блока БИ 2 сохранятся сигналы логического «0», отключения ГА не произойдет.
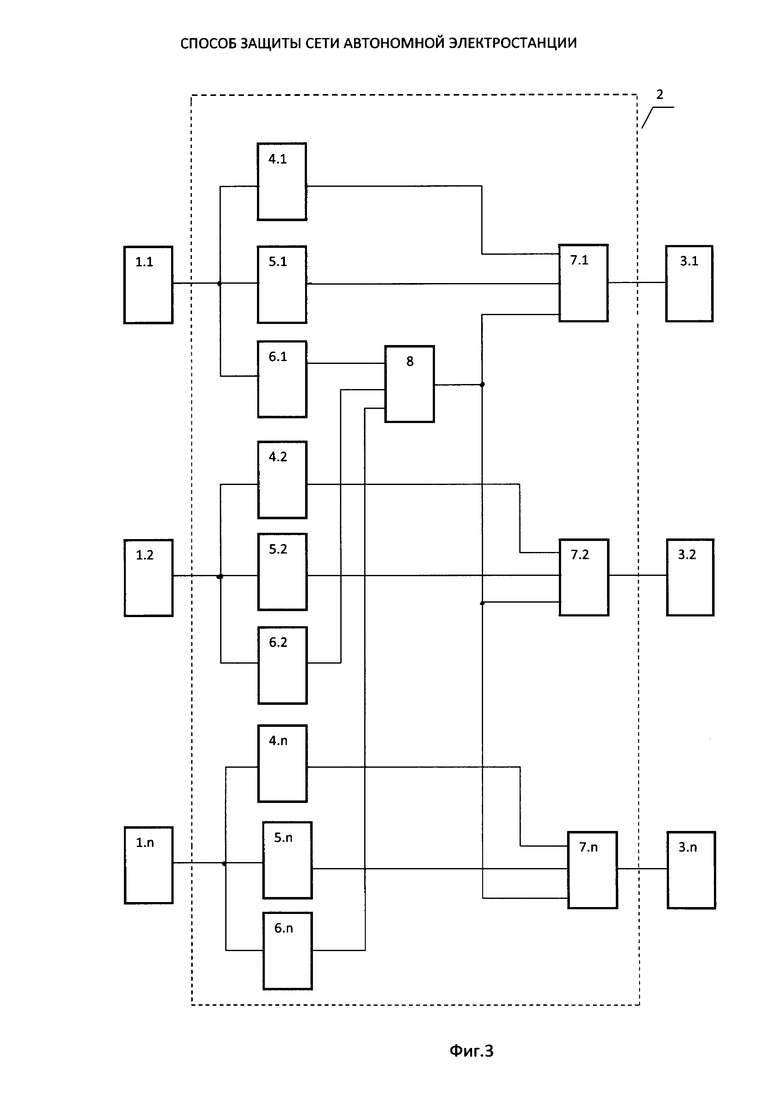
На Фиг. 3 представлена функциональная схема устройства, реализующего заявляемый способ с использованием БИ2, функциональная схема которого представлена на Фиг. 2, нумерация и названия блоков сохранены.
В предлагаемом изобретении с использованием БИ, функциональная схема которого представлена на Фиг. 2 предполагается, что выполняют следующие операции:
измеряют технические параметры, характеризующие мощность, вырабатываемую каждым из ГА, работающих параллельно;
определяют момент времени Tj, когда мощность, вырабатываемая одним или несколькими ГА увеличивается, а мощность, вырабатываемая другим ГА уменьшается и при этом этот ГА переходит в двигательный режим работы;
отключают ГА, перешедший в двигательный режим работы в момент времени Tj.
Пример реализации способа.
В качестве примера применения способа рассмотрим работу судовой электростанции в составе трех дизель-генераторов ДГ1, ДГ2 и ДГ3 с номинальной мощностью (Рном.) по 100 кВт каждый. При переходе ДГ в двигательный режим из сети потребляется мощность (обратная мощность) (Робр.), идущая на погашение потерь в ДГ. Пусть для данного типа ДГ она составит 18% от Рном., то есть Робр.=18 кВт. Предположим, что перегрузочная способность рассматриваемых ДГ (Рперегр.) - наибольшая величина нагрузки, которую может принять на себя данный агрегат и продолжать работать, соответствует 130% от Рном., то есть Рперег.=130 кВт.
Рассмотрим несколько режимов работы электростанции. Режим 1.
Пусть при параллельной работе данных ГА нагрузка ДГ1 составит 60 кВт, нагрузка ДГ2 составит 64 кВт, а нагрузка ДГ3 составит 70 кВт. Допустим, что произошла потеря работоспособности первичного двигателя ДГ3, например, вышел из строя трубопровод подачи топлива в дизель. В этом случае с уменьшением подачи топлива мощность, вырабатываемая ДГ3, начнет уменьшаться, а мощность, вырабатываемая ДГ1 и ДГ2 будет увеличиваться. На выходах датчиков мощности ГА 1.1 и 1.2 сигналы начнут увеличиваться, а на выходе датчика 1.3 будет уменьшаться. Эти сигналы поступят на входы БИ 2. Предположим, что этот блок имеет функциональную схему, представленную на фиг. 2. Тогда сигналы, пропорциональные мощности ДГ1, ДГ2 и ДГ3 поступят на первый, второй и третий входы БИ 2 соответственно. Так как сигналы на первом и втором входах БИ 2 будут расти, то на выходах блоков контроля увеличения мощности ГА 6.1 и 6.2 сформируются сигналы логической «1» и поступят на первый и второй входы логического элемента «ИЛИ» 8, на выходе которого появится сигнал логической «1» и поступит на третьи входы всех логических элементов «И» 1, «И» 2 и «И» 3. Так как на третьем входе БИ 2 сигнал будет уменьшаться, то на выходе блока контроля уменьшения мощности 5.3 появится сигнал логической «1» и поступит на второй вход логического элемента «И» 3. При разгрузке ДГ3 и переходе его в двигательный режим на выходе датчика перехода ГА в двигательный режим 4.3 появится сигнал логической «1» и поступит на первый вход логического элемента «И» 3. Так как на все три входа логического элемента «И» 3 поступил сигнал логической «1», то и на его выходе - сигнал логической «1», который через третий выход БИ 2 поступает на блок отключения ГА 3.3. Блок 3.3 отключает ДГ3. При этом вся нагрузка электростанции в 194 кВт поступает на оставшиеся в генераторном режиме ДГ1 и ДГ2.
Предположим, что дополнительная нагрузка между оставшимися в генераторном режиме агрегатами распределится равномерно, тогда нагрузка ДГ1 составит 95 кВт, а нагрузка ДГ2 составит 99 кВт, перегрузки не произойдет. Способ, принятый за прототип, приведет к отключению ДГ3 не сразу после перехода в двигательный режим, а через выдержку времени, которая для судов может составлять 10 секунд, при этом перешедший в двигательный режим ГА3 дополнительно нагрузит сеть на 18 кВт, и нагрузка ГА1 составит 104 кВт, нагрузка ГА2 108 кВт, то есть агрегаты окажутся перегружены, что может привести к отключению части потребителей.
Режим работы 2.
Пусть в составе электростанции в данном режиме работают только два ГА. При этом нагрузка ГА1 составляет 60 кВт, а нагрузка ГА2 - 64 кВт. Допустим, что в процессе работы произошел отказ первичного двигателя ГА2 и он перешел в двигательный режим. Согласно предложенному способу, так как нагрузка ГА1 увеличится, а нагрузка ГА2 уменьшится, то при переходе в двигательный режим ГА2 будет отключен от сети и нагрузка ГА1 составит 128 кВт. ГА1, хоть и будет перегружен, но останется в работе благодаря его перегрузочной способности. В способе, принятом за прототип, ГА2 будет отключен только через выдержку времени (до 10 секунд), за которую он дополнительно нагрузит сеть на 18 кВт и нагрузка ГА1 составит 146 кВт, что приведет к остановке ГА1, обесточиванию судна и потере его управляемости.
Режим работы 3.
Допустим, что работают параллельно ДГ1 и ДГ2, основную нагрузку составляет грузовая лебедка. Пусть перед спуском груза нагрузка ДГ1 составляет 23 кВт, а нагрузка ДГ2 составляет 28 кВт. Спуск осуществляется с рекуперацией энергии в сеть эквивалентной работе внешнего источника мощностью 50 кВт., который будет разгружать ДГ1 и ДГ2. При этом, в случае равномерного перераспределения дополнительной мощности, ДГ1 перейдет в двигательный режим и нагрузит сеть на 2 кВт (дизель ДГ1 исправен и сам будет покрывать оставшуюся часть потерь, равную 16 кВт), ДГ2 останется в генераторном режиме и окажется загружен на 3 кВт. Так как оба ДГ в при переходе ДГ1 в двигательный режим снижали нагрузку, то отключение перешедшего в двигательный режим ДГ1 не произойдет. После окончания торможения ДГ1 и ДГ2 вновь вернутся в генераторный режим и будут готовы к подъему груза. В данном режиме устройство, реализующее способ, принятый за прототип, работает аналогично и тоже не отключит ДГ1, перешедший в двигательный режим, в течение заданной выдержки времени, величина которой выбирается гарантированно большей, чем время торможения грузовой лебедки.
Предлагаемое изобретение было создано в процессе разработки опытного образца блока защиты от перегрузки СЭЭС, проводимой ООО «Форпик Стандарт Сервис». Были произведены расчеты и изготовлена действующая модель устройства, реализующего заявляемый способ, лабораторные испытания которой показали возможность использования данного способа в судовых энергетических установках и электроэнергетических системах, что с учетом выше изложенного позволяет сделать вывод о возможности его промышленного применения.
Использование: в области электротехники для защиты судовых и других автономных электростанций (СЭС) с параллельно работающими генераторными агрегатами (ГА) в случае выхода из строя одного или нескольких из них. Технический результат – сокращение времени отключения неработоспособного источника электрической энергии от сети. Способ позволяет решить проблему защиты СЭС посредством отключения неработоспособного ГА в момент его перехода в двигательный режим работы. Согласно способу измеряют параметры, характеризующие мощность, вырабатываемую каждым из ГА, на основании результатов измерений определяют момент времени, при котором какой-либо из ГА оказывается неработоспособным и при этом переходит в двигательный режим работы и отключают этот ГА от сети. 3 з.п. ф-лы, 3 ил.
1. Способ защиты автономной электростанции посредством отключения неработоспособного генераторного агрегата (ГА), при котором измеряют технические параметры, характеризующие мощность, вырабатываемую каждым из ГА, работающих параллельно, определяют на основании измерений момент времени, когда один из ГА оказывается неработоспособным и при этом переходит в двигательный режим работы, и отключают этот ГА от сети.
2. Способ по п. 1, в котором момент времени, когда ГА оказался неработоспособным и при этом перешел в двигательный режим работы, определяют как момент времени, когда при параллельной работе мощность, вырабатываемая одним или несколькими ГА, увеличивается, а мощность, вырабатываемая другим ГА, уменьшается и при этом этот ГА переходит в двигательный режим работы.
3. Способ по п. 1, заключающийся в том, что для его осуществления используется устройство, содержащее по числу ГА датчики мощности ГА, блоки отключения ГА и блок идентификации момента времени, когда какой-либо из ГА оказывается неработоспособным и перестает вырабатывать (развивать) мощность, превышающую собственные потери мощности ГА (БИ), причем выходы датчиков мощности соединены с соответствующими входами БИ, соответствующие выходы которого соединены с входами соответствующих блоков отключения.
4. Способ по п. 3, заключающийся в том, что для его осуществления используется БИ, который содержит по числу ГА датчики перехода ГА в двигательный режим, блоки контроля уменьшения мощности, блоки контроля увеличения мощности, логические элементы «И» и логический элемент «ИЛИ», при этом входы соответствующих датчиков перехода ГА в двигательный режим соединены с входами соответствующих блоков контроля уменьшения мощности, входами соответствующих блоков контроля увеличения мощности и соответствующими входами блока БИ; выходы соответствующих датчиков перехода ГА в двигательный режим соединены с первыми входами соответствующих логических элементов «И», выходы блоков контроля уменьшения мощности соединены со вторыми входами соответствующих логических элементов «И», выходы блоков контроля увеличения мощности соединены с соответствующими входами логического элемента «ИЛИ», выход которого соединен с третьими входами логических элементов «И», выходы которых соединены с соответствующими выходами БИ.
| Г.С | |||
| Яковлев | |||
| Судовые электроэнергетические системы | |||
| Ленинград, Судостроение, 1987, с.132 | |||
| ПЕРЕДВИЖНАЯ ЭЛЕКТРОСТАНЦИЯ | 2005 |
|
RU2295189C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ ВКЛЮЧЕНИЕМ РЕЗЕРВНОГО ПИТАНИЯ | 1995 |
|
RU2094924C1 |
| WO 9718612 A, 22.05.1997. | |||

