Область техники.
Изобретение относится к области электроэнергетики, а именно к способу измерения гололедно-ветровой нагрузки на воздушных линиях электропередачи (ВЛЭП), и может быть использовано для регистрации величин силы и частоты динамического воздействия пляски провода на стойку и траверсу опоры ВЛЭП.
Уровень техники.
Известен визуальный способ обнаружения и оценки параметров пляски проводов или грозотросов воздушных линий электропередачи [1].
Главным недостатком визуального способа является то, что он требует непосредственного присутствия наблюдателя на контролируемом участке ВЛЭП и имеет низкую точность измерения параметров пляски и практически не реализуем в условиях плохой видимости.
Известны способы и соответствующие устройства обнаружения пляски проводов ВЛЭП и измерения ее параметров, основанные на измерении параметров электромагнитного поля провода с помощью антенн (электромагнитных датчиков), располагаемых вблизи контролируемого пролета на электробезопасном расстоянии от проводов, и имеющие по сравнению с визуальным способом более высокую точность. При пляске проводов изменяются амплитуды и фазы наведенных в датчиках сигналов промышленной частоты. При соответствующей обработке по частоте и амплитуде наведенных сигналов судят о наличии механической пляски и ее параметрах [2-7].
Недостатком таких способов и устройств для их осуществления является невозможность измерения параметров пляски на тросах ВЛЭП. Также не производится одновременное измерение в реальном масштабе времени гололедно-ветровой нагрузки, приводящей к появлению пляски проводов в промежуточном пролете ВЛЭП. Кроме того, не измеряется сила, воздействующая на опору вдоль оси визирования ВЛЭП, создающая пляску провода в продольном направлении.
Известен способ обнаружения пляски проводов, основанный на фиксации появления изменения интенсивности лазерного луча, проходящего от передатчика к приемнику, из-за перекрытия его пляшущим проводом [8]. По параметрам частоты изменения интенсивности лазерного луча предлагается измерять параметры пляски.
Недостатком способа является то, что не производится измерение гололедно-ветровой нагрузки, приводящей к появлению пляски проводов в промежуточном пролете ВЛЭП. Кроме того, не измеряется сила, воздействующая на опору вдоль оси визирования ВЛЭП, создающая пляску провода в продольном направлении.
Известен также способ определения пляски проводов и ее параметров по сигналам с электромеханических акселерометров с осью чувствительности, перпендикулярной оси провода, установленных соответственно на четверти длины провода справа и слева от точек подвески провода промежуточного пролета. По изменению амплитуды и фазы сигналов с выходов акселерометров вычисляется длина волны пляски [9].
Недостатком способа является то, что не производится измерения гололедно-ветровой нагрузки, приводящей к появлению пляски проводов в промежуточном пролете ВЛЭП. Кроме того, не измеряется сила, воздействующая на опору вдоль оси визирования ВЛЭП, создающая пляску провода.
Наиболее близким к заявленному изобретению является способ обнаружения предвестника пляски провода промежуточного пролета ВЛЭП, в соответствии с которым в месте крепления провода промежуточного пролета к гирлянде изоляторов одновременно измеряют величины гололедной и ветровой нагрузок на провод и величину продольного ускорения провода, эти величины сравнивают с соответствующими пороговыми значениями, и если они превышают их или равны им, то принимают решение о наличии предвестника пляски провода промежуточного пролета ВЛЭП, а если измеренные величины окажутся меньше соответствующих пороговых значений, то принимают решение об отсутствии предвестника пляски провода [10].
Также наиболее близким к заявленному изобретению является устройство, предназначенное для осуществления способа обнаружения предвестника пляски провода промежуточного пролета ВЛЭП, содержащее два силоизмерительных датчика, к нижним концам которых, соединенным между собой шарнирно, крепится провод, а верхние концы датчиков через соответствующие гирлянды изоляторов закреплены на траверсе опоры на расстоянии друг от друга, равном длине гирлянды изоляторов с датчиком, образуя таким образом равносторонний треугольник с V-образной подвеской провода, датчик продольного ускорения, установленный в месте крепления провода к силоизмерительным датчикам, три канала телепередачи, три функциональных преобразователя, три формирователя порога, три пороговых элемента, трехвходовый логический элемент И, в соответствии с этим первый и второй силоизмерительные датчики, а также датчик продольного ускорения соответственно подключены к входам первого, второго и третьего каналов телепередачи, выходы первого и второго каналов телепередачи подключены параллельно к соответствующим входам первого и второго функциональных преобразователей, к выходу первого функционального преобразователя подключен первый вход третьего функционального преобразователя, выход третьего функционального преобразователя подключен к первому входу первого порогового элемента, ко второму входу первого порогового элемента подключен первый формирователь порога, выход первого порогового элемента соединен с первым входом логического элемента И, на выход второго функционального преобразователя подключен второй вход третьего функционального преобразователя и первый вход второго порогового элемента, выход второго порогового элемента соединен со вторым входом логического элемента И, ко второму входу второго порогового элемента подключен выход второго формирователя порога, выход третьего канала телепередачи подключен к первому входу третьего порогового элемента, ко второму входу которого подключен выход третьего формирователя порога, выход третьего порогового элемента соединен с третьим входом логического элемента И, выход логического элемента И является выходом устройства [10].
Недостатком известных способа и устройства для его осуществления является то, что не измеряются величина и частота силы динамического воздействия пляски, передающейся от провода через гирлянду изоляторов на траверсу и стойку опоры, которая и является причиной поломки траверс и стоек, и падения опор ВЛЭП. Кроме того, для осуществления этого способа требуется установка V-образной подвески провода, возможность осуществления которой есть не всегда.
Раскрытие сущности изобретения.
Техническим результатом заявленного изобретения, является одновременное измерение в режиме реального времени гололедно-ветровой нагрузки и регистрация величин максимальной силы и частоты динамического воздействия на стойку и траверсу опоры ВЛЭП за период колебаний во время пляски провода без использования V-образной подвески провода и в отсутствии наблюдателя на контролируемом участке ВЛЭП.
Заявленный технический результат достигается тем, что используют способ регистрации гололедно-ветровой нагрузки и пляски проводов на ВЛЭП, заключающемся в том, что в месте крепления провода промежуточного пролета к гирлянде изоляторов одновременно измеряют величины гололедной и ветровой нагрузок на провод и величину продольного ускорения провода, эти величины сравнивают с соответствующими пороговыми значениями, отличающийся тем что в месте крепления провода промежуточного пролета к гирлянде изоляторов, подвешенной к траверсе на стойке опоры ВЛЭП, одновременно измеряют следующее:
- величину силы, вызванной гололедно-ветровой нагрузкой,
- величину и направление продольного ускорения провода,
- величину и направление поперечного ускорения провода;
производят регистрацию значений силы, продольного и поперечного ускорений в моменты времени, когда продольное и поперечное ускорения достигают максимальных значений, затем проводят вычисление максимальной силы динамического воздействия, пропорциональной измеренному продольному ускорению и направленной вдоль оси визирования ВЛЭП, а также определяют частоту изменения этой силы по частоте изменения продольного ускорения провода.
Устройство для реализации способа регистрации гололедно-ветровой нагрузки и пляски проводов на ВЛЭП, содержащее силоизмерительный датчик, размещенный в месте крепления провода к гирлянде изоляторов, подвешенной к траверсе на стойке опоры ВЛЭП, датчик ускорения провода, установленный на провод у места его крепления к силоизмерительному датчику, первый, второй и третий каналы телепередачи, отличающееся тем, что, в качестве датчика ускорения провода использован двухосевой датчик ускорения провода, измеряющий продольное и поперечное ускорения провода, дополнительно введены блок определения модуля производной поперечного ускорения, блок определения модуля производной продольного ускорения, первый, второй и третий ключи, срабатывающие при значении модуля производной поперечного ускорения близком к нулю, первый блок памяти, запоминающий значение силы в крайней точке траектории колебаний гирлянды по поперечной оси, второй блок памяти, запоминающий значение поперечного ускорения в крайней точке траектории колебаний гирлянды по поперечной оси, третий блок памяти, запоминающий значение продольного ускорения в крайней точке траектории колебаний гирлянды по поперечной оси, четвертый, пятый и шестой ключи, срабатывающие при значении модуля производной продольного ускорения близком к нулю, четвертый блок памяти, запоминающий значение силы в крайней точке траектории колебаний гирлянды по продольной оси, пятый блок памяти, запоминающий значение продольного ускорения в крайней точке траектории колебаний гирлянды по продольной оси, шестой блок памяти, запоминающий значение поперечного ускорения в крайней точке траектории колебаний гирлянды по продольной оси, счетчик времени, определяющий период колебаний продольного ускорения провода, блок, определяющий величину максимальной силы динамического воздействия пляски за период колебаний, блок возведения в степень -1, первый выход устройства «Гололедно-ветровая нагрузка N», второй выход устройства «Максимальная сила динамического воздействия пляски Fд.max», третий выход устройства «Частота продольных колебаний провода fa», при этом выход силоизмерительного датчика соединен с входом первого канала телепередачи, выход которого подключен к первому выходу устройства, к входу первого ключа, выход которого в свою очередь подключен к входу первого блока памяти, чей выход соединен с первым входом блока определения величины максимальной силы динамического воздействия, и к входу четвертого ключа, выход которого в свою очередь подключен к входу четвертого блока памяти, чей выход соединен с четвертым входом блока определения величины максимальной силы динамического воздействия, датчик ускорения передает данные о поперечном ускорении провода на вход второго канала телепередачи, выход которого подключен к входу блока определения модуля производной поперечного ускорения, соединенного своим выходом с управляющими входами первого, второго и третьего ключей и приводящего их в действие при близости модуля производной поперечного ускорения к нулю, к входу второго ключа, выход которого в свою очередь подключен к входу второго блока памяти, чей выход соединен со вторым входом блока определения величины максимальной силы динамического воздействия, и ко входу шестого ключа, выход которого в свою очередь подключен ко входу шестого блока памяти, чей выход соединен с шестым входом блока определения величины максимальной силы динамического воздействия, датчик ускорения передает данные о продольном ускорении провода на вход третьего канала телепередачи, выход которого подключен к входу блока определения модуля производной продольного ускорения, соединенного своим выходом с управляющими входами четвертого, пятого и шестого ключей и приводящего их в действие при близости модуля производной продольного ускорения к нулю, к входу третьего ключа, выход которого в свою очередь подключен к входу третьего блока памяти, чей выход соединен с третьим входу блока определения величины максимальной силы динамического воздействия, ко входу пятого ключа, выход которого в свою очередь подключен ко входу пятого блока памяти, чей выход соединен с пятым входом блока определения величины максимальной силы динамического воздействия, и ко входу счетчика времени, выход которого подключен ко входу блока возведения в степень -1, чей выход в свою очередь соединен с третьим выходом устройства, а выход блока определения величины максимальной силы динамического воздействия соединен со вторым выходом устройства.
Блок определения модуля производной поперечного ускорения содержит блок задержки сигнала поперечного ускорения ах, сумматор определения приращения поперечного ускорения ах, формирователь сигнала длительности задержки поперечного ускорения ах, делитель, определяющий значение производной поперечного ускорения ах, блок модуля производной поперечного ускорения ах, при этом выход второго канала телепередачи соединен с первым входом сумматора определения приращения поперечного ускорения ах и входом блока задержки поперечного ускорения ах, выход которого подключен ко второму входу сумматора определения приращения поперечного ускорения ах, выход сумматора определения приращения поперечного ускорения ах подключен к первому входу делителя, определяющего значение производной поперечного ускорения ах, ко второму входу которого подключен выход формирователя сигнала длительности задержки поперечного ускорения ах, а выход делителя, определяющего значение производной поперечного ускорения ах, подключен к входу блока модуля производной поперечного ускорения ах.
Блок определения модуля производной продольного ускорения содержит блок задержки сигнала продольного ускорения ау, сумматор определения приращения продольного ускорения ау, формирователь сигнала длительности задержки продольного ускорения ау, делитель, определяющий значение производной продольного ускорения ау, блок модуля производной продольного ускорения ау, при этом выход третьего канала телепередачи соединен с первым входом сумматора определения приращения продольного ускорения ау и входом блока задержки сигнала продольного ускорения ау, выход которого подключен ко второму входу сумматора определения приращения продольного ускорения ау, выход сумматора определения приращения продольного ускорения ау подключен к первому входу делителя, определяющего значение производной продольного ускорения ау, ко второму входу которого подключен выход формирователя сигнала длительности задержки продольного ускорения ау, а выход делителя, определяющего значение производной продольного ускорения ау, подключен к входу блока модуля производной продольного ускорения ау.
Блок, определяющий величину максимальной силы динамического воздействия пляски за период колебаний, содержит первый умножитель, определяющий сигнал N22, второй умножитель, определяющий сигнал ax22, третий умножитель, определяющий сигнал ay22, четвертый умножитель, определяющий сигнал N12, пятый умножитель, определяющий сигнал ay12, шестой умножитель, определяющий сигнал ax12, сумматор, определяющий сигнал N22-N12, сумматор, определяющий сигнал суммы ax22, ay22, -ax12, -ay12, первый делитель, определяющий частное суммы квадратов ускорений и ay12, второй делитель, определяющий Fд.max2, блок, определяющий корень второй степени Fд.max, при этом первый блок памяти соединен с двумя входами первого умножителя, второй блок памяти соединен с двумя входами второго умножителя, третий блок памяти соединен с двумя входами третьего умножителя, четвертый блок памяти соединен с двумя входами четвертого умножителя, пятый блок памяти соединен с двумя входами пятого умножителя, шестой блок памяти соединен с двумя входами шестого умножителя, первый вход сумматора, определяющего сигнал N22-N12, соединен с выходом первого умножителя, второй вход сумматора соединен с выходом четвертого умножителя, первый вход сумматора, определяющего сигнал суммы ах22, ay22, -ax12, -ay12, соединен с выходом второго умножителя, второй вход сумматора соединен с выходом третьего умножителя, третий вход сумматора соединен с выходом пятого умножителя, четвертый вход сумматора соединен с выходом шестого умножителя, выход сумматора соединен с первым входом первого делителя, на второй вход которого поступает сигнал с выхода пятого умножителя, на первый вход второго делителя, поступает сигнал с выхода сумматора, определяющего сигнал N22-N12, на второй вход второго делителя поступает сигнал с выхода первого делителя, выход второго делителя подключен к входу блока, определяющего корень второй степени Fд.max.
Одновременное измерение величин и направлений продольного и поперечного ускорений провода с последующей регистрацией значений силы, продольного и поперечного ускорений в моменты времени, когда продольное и поперечное ускорения достигают максимальных значений, позволяют проводить вычисление максимальной силы динамического воздействия, пропорциональной измеренному продольному ускорению и направленной вдоль оси визирования ВЛЭП, а также определять частоту изменения этой силы по частоте изменения продольного ускорения провода. Это обеспечивает возможность одновременного измерения в реальном масштабе времени гололедно-ветровой нагрузки, а также регистрации величин максимальной силы и частоты динамического воздействия на стойку и траверсу опоры ВЛЭП за период колебаний во время пляски проводов без использования V-образной подвески провода и в отсутствии наблюдателя на контролируемом участке ВЛЭП.
Введение двухосевого датчика ускорения провода позволяет при расчете величины максимальной силы динамического воздействия отстроиться от величины ветровой нагрузки за счет определения ускорения провода отдельно по продольной и поперечной оси.
Введение блока определения модуля производной поперечного ускорения позволяет определять момент прохождения крайней точки траектории колебаний гирлянды по поперечной оси и открывать ключи в этот момент для записи данных в блоки памяти даже при эллиптической форме колебаний.
Введение блока определения модуля производной продольного ускорения позволяет определять момент прохождения крайней точки траектории колебаний гирлянды по продольной оси и открывать ключи в этот момент для записи данных в блоки памяти даже при эллиптической форме колебаний.
Введение шести ключей позволяет перезаписывать значения величин силы, поперечного и продольного ускорения в блоках памяти в моменты прохождения крайних точек траектории колебаний гирлянды по продольной и поперечной оси, что позволяет обновлять данные, измеренные в этих точках, каждый период колебаний.
Введение шести блоков памяти позволяет раздельно запоминать значения величин силы, поперечного и продольного ускорения в моменты прохождения крайних точек траектории колебаний гирлянды по продольной и поперечной оси.
Введение счетчика времени, определяющего период колебаний продольного ускорения провода, позволяет определить длительность периода колебаний провода, вызванных силой динамического воздействия пляски.
Введение блока, определяющего величину максимальной силы динамического воздействия пляски за период колебаний, позволяет рассчитать величину максимальной силы, которая создается тяжением провода и передается через гирлянду изоляторов на опору ВЛЭП, даже при эллиптической траектории колебаний.
Введение блока возведения в степень -1 позволяет определить частоту колебаний провода, вызванную силой динамического воздействия пляски.
Введение первого, второго и третьего выходов устройства позволяет контролировать гололедно-ветровую нагрузку, силу динамического воздействия пляски провода и частоты продольных колебаний провода ВЛЭП, соответственно.
Краткое описание чертежей.
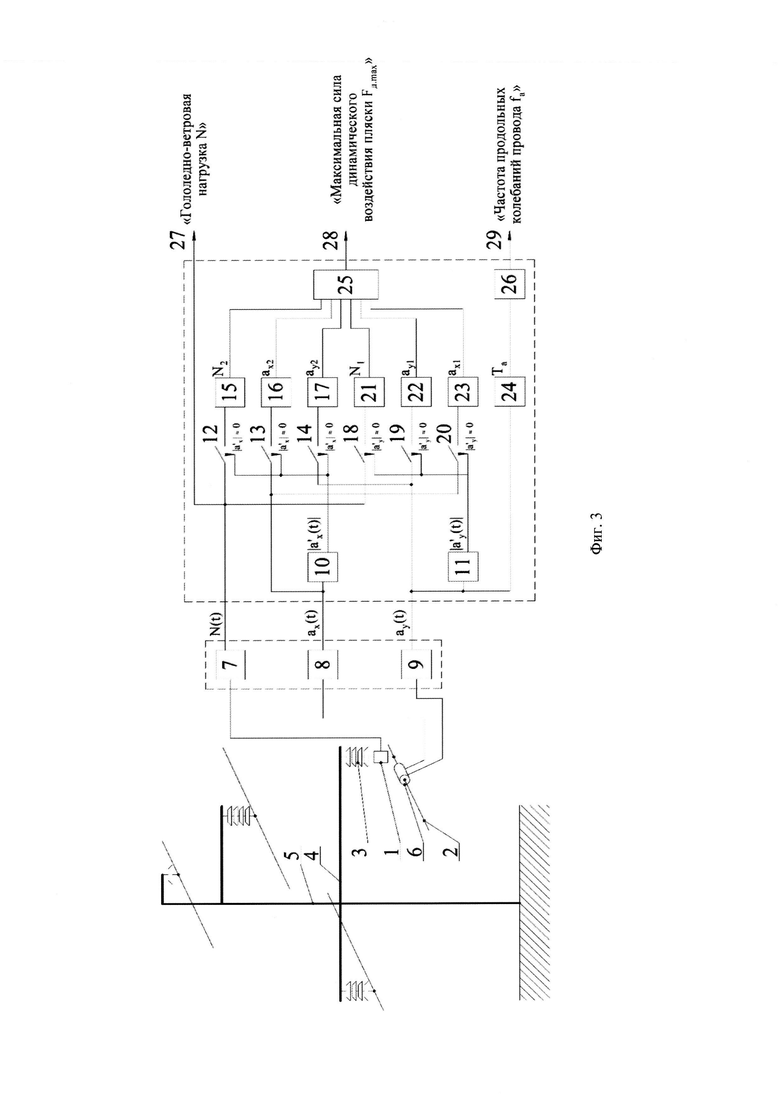
На фиг. 1 показано пространственное расположение векторов сил при совместном действии веса провода, ветровой нагрузки и силы динамического воздействия пляски провода.
На фиг. 2 показаны крайние точки траектории колебаний гирлянды по продольной и поперечной осям и соответствующие им значения поперечного и продольного ускорений.
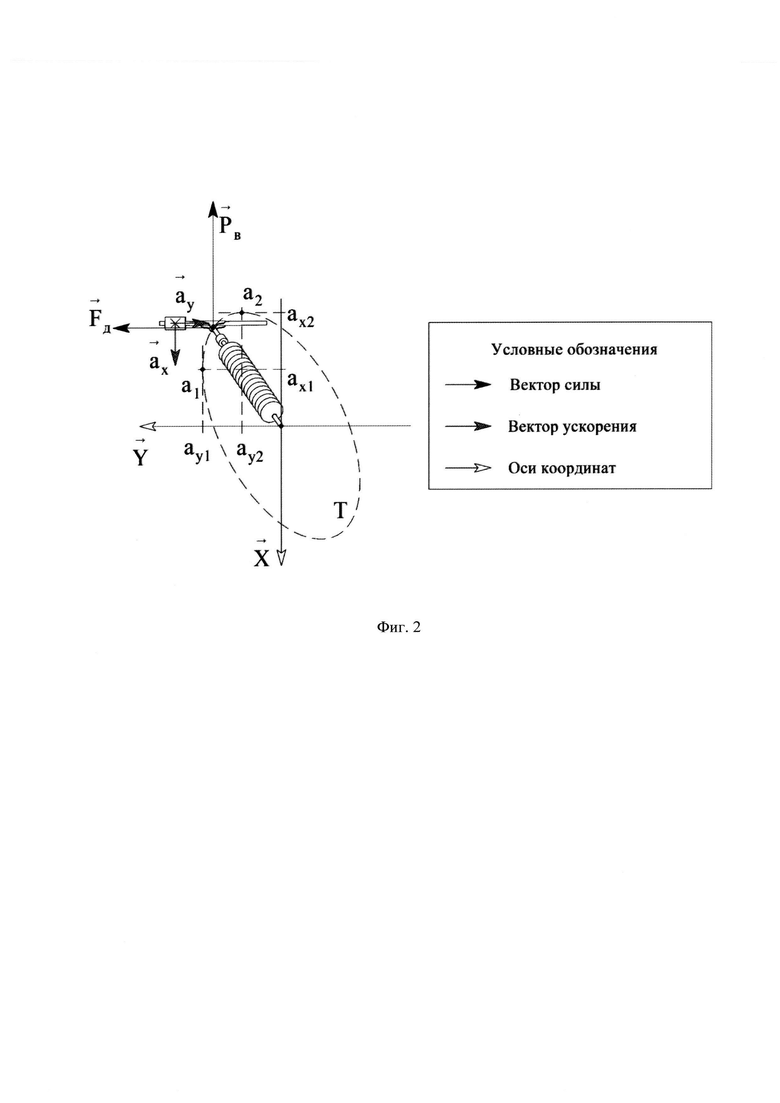
На фиг. 3 показана функциональная схема устройства регистрации гололедно-ветровой нагрузки и пляски проводов ВЛЭП.
На фиг. 4 показано блок определения модуля производной поперечного ускорения.
На фиг. 5 показано блок определения модуля производной продольного ускорения.
На фиг. 6 показано устройство блока, определяющего величину максимальной силы динамического воздействия пляски за период колебаний.
На фиг. 1 приняты следующие обозначения:
1 - силоизмерительный датчик;
2 - провод;
3 - гирлянда изоляторов;
4 - траверса;
5 - стойка опоры ВЛЭП;
6 - двухосевой датчик ускорения провода.
На фиг. 3 приняты следующие обозначения:
1 - силоизмерительный датчик;
2 - провод;
3 - гирлянда изоляторов;
4 - траверса;
5 - стойка опоры ВЛЭП;
6 - двухосевой датчик ускорения провода;
7 - первый канал телепередачи;
8 - второй канал телепередачи;
9 - третий канал телепередачи;
10 - блок определения модуля производной поперечного ускорения;
11 - блок определения модуля производной продольного ускорения;
12 - первый ключ;
13 - второй ключ;
14 - третий ключ;
15 - первый блок памяти;
16 - второй блок памяти;
17 - третий блок памяти;
18 - четвертый ключ;
19 - пятый ключ;
20 - шестой ключ;
21 - четвертый блок памяти;
22 - пятый блок памяти;
23 - шестой блок памяти;
24 - счетчик времени;
25 - блок, определяющий величину максимальной силы динамического воздействия пляски за период колебаний;
26 - блок возведения в степень -1;
27 - первый выход устройства «Гололедно-ветровая нагрузка N»;
28 - второй выход устройства «Сила динамического воздействия пляски Fд.max»;
29 - третий выход устройства «Частота продольных колебаний провода fa».
На фиг. 4 приняты следующие обозначения:
30 - блок задержки сигнала поперечного ускорения ах;
31 - сумматор определения приращения поперечного ускорения ах;
32 - формирователь сигнала длительности задержки поперечного ускорения ах;
33 - делитель, определяющий значение производной поперечного ускорения ах;
34 - блок модуля производной поперечного ускорения ах.
На фиг. 5 приняты следующие обозначения:
35 - блок задержки сигнала продольного ускорения ау;
36 - сумматор определения приращения продольного ускорения ау;
37 - формирователь сигнала длительности задержки продольного ускорения ау;
38 - делитель, определяющий значение производной продольного ускорения ау;
39 - блок модуля производной продольного ускорения ау.
На фиг. 6 приняты следующие обозначения:
40 - первый умножитель, определяющий сигнал N22;
41 - второй умножитель, определяющий сигнал ax22;
42 - третий умножитель, определяющий сигнал ау22;
43 - четвертый умножитель, определяющий сигнал N12;
44 - пятый умножитель, определяющий сигнал ay12;
45 - шестой умножитель, определяющий сигнал ax12;
46 - сумматор, определяющий сигнал N22-N12;
47 - сумматор, определяющий сигнал суммы ax22, ay22, -ax12, -ay12;
48 - первый делитель, определяющий частное суммы квадратов ускорений и ay12;
49 - второй делитель, определяющий Fд.max2;
50 - блок, определяющий корень второй степени Fд.max.
Осуществление изобретения.
На фиг. 1 показано пространственное расположение векторов сил, абсолютное значение векторной суммы которых измеряет силоизмерительный датчик 1, размещенный в месте крепления провода 2 к гирлянде изоляторов 3, подвешенной к траверсе 4 на стойке 5 опоры ВЛЭП, вместе с двухосевым датчиком 6 ускорения провода, установленным на провод у места его крепления к силоизмерительному датчику 1. В общем случае на провод 2 воздействуют три силы, коллинеарные трем осям пространства: вес Р провода с гололедными отложениями, направленный вдоль вертикальной оси Z, ветровая нагрузка Рв, направленная вдоль поперечной оси X, и сила Fд динамического воздействия пляски провода, направленная вдоль продольной оси Y - их векторная сумма определяет пространственное положение провода с гирляндой и оказывает воздействие на опору линии, что может привести к поломке траверсы и стойки.
В общем случае, траекторию периода Т колебаний гирлянды изоляторов 3 (фиг. 1 и 3) в плоскости, параллельной земле можно принять эллиптической, при этом если рассматривать малые отклонения гирлянды изоляторов 3 (фиг. 1 и 3) от вертикали, то можно принять, что сила, воздействующая на провод 2 (фиг. 1 и 3) прямо пропорциональна ускорению провода 2 (фиг. 1 и 3) с обратным знаком F~-а, так как при движении к крайней точке колебаний скорость уменьшается тем сильнее, чем больше угол отклонения от вертикали, прямо пропорциональный вынуждающей силе; при разложении сил по осям X и Y видно, что в крайней точке по поперечной оси на провод действует максимальная по абсолютной величине ветровая нагрузка -Рв.2 и сила динамического воздействия пляски Fд.2, а скорость провода 2 (фиг. 1 и 3) изменяется с ускорением а2, которое раскладывается по осям на ах2 и -ay2, и при этом ах2 максимально по поперечной оси на всей траектории колебаний и однозначно определяет максимальную по модулю Рв.2, также в крайней точке по продольной оси на провод 2 (фиг. 1 и 3) действует ветровая нагрузка -Pв.1 и максимальная сила динамического воздействия пляски Fд.1=Fд.max, а скорость провода 2 (фиг. 1 и 3) изменяется с ускорением a1, которое раскладывается по осям на ax1 и -ay1, и при этом -ay1 максимально по абсолютному значению по продольной оси на всей траектории колебаний и однозначно определяет максимальную Fд.1; данные факторы позволяют определить максимальную Fд.max=Fд.1 основываясь на измерении общей силы гололедно-ветровой нагрузки N и ускорений в поперечной и продольной оси по следующей формуле:
где N2 - гололедно-ветровая нагрузка в крайней точке по поперечной оси,
N1 - гололедно-ветровая нагрузка в крайней точке колебаний по продольной оси,
ах2 - поперечное ускорение в крайней точке колебаний по поперечной оси,
ay2 - продольное ускорение в крайней точке колебаний по поперечной оси,
ax1 - поперечное ускорение в крайней точке колебаний по продольной оси,
ay1 - продольное ускорение в крайней точке колебаний по продольной оси (фиг. 2).
Функциональная схема устройства регистрации гололедно-ветровой нагрузки и пляски проводов ВЛЭП (фиг. 3), содержит силоизмерительный датчик 1 (фиг. 1 и 3), размещенный в месте крепления провода 2 (фиг. 1 и 3) к гирлянде изоляторов 3 (фиг. 1 и 3), подвешенной к траверсе 4 (фиг. 1 и 3) на стойке опоры ВЛЭП 5 (фиг. 1 и 3), двуосный датчик ускорения провода 6 (фиг. 1 и 3), установленный на провод 2 (фиг. 1 и 3) у места его крепления к силоизмерительному датчику 1 (фиг. 1 и 3), первый 7 (фиг. 3), второй 8 (фиг. 3) и третий 9 (фиг. 3) каналы телепередачи, блок определения модуля производной поперечного ускорения 10 (фиг. 3), блок определения модуля производной продольного ускорения 11 (фиг. 3), первый 12 (фиг. 3), второй 13(фиг. 3) и третий 14 (фиг. 3) ключи, срабатывающие при значении модуля производной поперечного ускорения (фиг. 4) близком к нулю, первый блок памяти 15 (фиг. 3), запоминающий значение силы в крайней точке траектории колебаний гирлянды изоляторов 3 (фиг. 1 и 3) по поперечной оси, второй блок памяти 16 (фиг. 3), запоминающий значение поперечного ускорения в крайней точке траектории колебаний гирлянды изоляторов 3 (фиг. 1 и 3) по поперечной оси, третий блок памяти 17 (фиг. 3), запоминающий значение продольного ускорения в крайней точке траектории колебаний гирлянды изоляторов 3 (фиг. 1 и 3) по поперечной оси, четвертый 18 (фиг. 3), пятый 19 (фиг. 3) и шестой 20 (фиг. 3) ключи, срабатывающие при значении модуля производной продольного ускорения (фиг. 5) близком к нулю, четвертый блок памяти 21 (фиг. 3), запоминающий значение силы в крайней точке траектории колебаний гирлянды изоляторов 3 (фиг. 1 и 3) по продольной оси, пятый блок памяти 22 (фиг. 3), запоминающий значение продольного ускорения в крайней точке траектории колебаний гирлянды изоляторов 3 (фиг. 1 и 3) по продольной оси, шестой блок памяти 23 (фиг. 3), запоминающий значение поперечного ускорения в крайней точке траектории колебаний гирлянды изоляторов 3 (фиг. 1 и 3) по продольной оси, счетчик времени 24 (фиг. 3), определяющий период колебаний продольного ускорения провода 2 (фиг. 1 и 3), блок 25 (фиг. 3), определяющий величину максимальной силы динамического воздействия пляски за период колебаний, блок 26 (фиг. 3) возведения в степень -1, первый выход 27 (фиг. 3) устройства «Гололедно-ветровая нагрузка N», второй выход 28 (фиг. 3) устройства «Максимальная сила динамического воздействия пляски Fд.max», третий выход 29 (фиг. 3) устройства «Частота продольных колебаний провода fa».
При этом выход силоизмерительного датчика 1 (фиг. 1 и 3) соединен с входом первого канала телепередачи 7 (фиг. 3), выход которого подключен к первому выходу 27 (фиг. 3) устройства, к входу первого ключа 12 (фиг. 3), выход которого в свою очередь подключен ко входу первого блока памяти 15 (фиг. 3), чей выход соединен с первым входом блока 25 (фиг. 3), и ко входу четвертого ключа 18 (фиг. 3), выход которого в свою очередь подключен ко входу четвертого блока памяти 21 (фиг. 3), чей выход соединен с четвертым входом блока 25 (фиг. 3), двухосевой датчик ускорения провода 6 (фиг. 1 и 3) передает данные о поперечном ускорении на вход второго канала телепередачи 8 (фиг. 3), выход которого подключен к входу блока определения модуля производной поперечного ускорения 10 (фиг. 3), соединенного своим выходом с управляющими входами первого 12 (фиг. 3), второго 13 (фиг. 3) и третьего 14 (фиг. 3) ключей и приводящего их в действие при близости модуля производной поперечного ускорения к нулю, к входу второго ключа 13 (фиг. 3), выход которого в свою очередь подключен к входу второго блока памяти 16 (фиг. 3), чей выход соединен с вторым входом блока 25 (фиг. 3), и ко входу шестого ключа 20 (фиг. 3), выход которого в свою очередь подключен ко входу шестого блока памяти 23 (фиг. 3), чей выход соединен с шестым входом блока 25 (фиг. 3), двухосевой датчик ускорения провода 6 (фиг. 1 и 3) передает данные о продольном ускорении на вход третьего канала телепередачи 9 (фиг. 3), выход которого подключен к входу блока определения модуля производной продольного ускорения 11 (фиг. 3), соединенного своим выходом с управляющими входами четвертого 18 (фиг. 3), пятого 19 (фиг. 3) и шестого 20 (фиг. 3) ключей и приводящего их в действие при близости модуля производной продольного ускорения к нулю, к входу третьего ключа 14 (фиг. 3), выход которого в свою очередь подключен ко входу третьего блока памяти 17 (фиг. 3), чей выход соединен с третьим входом блока, определяющего величину максимальной силы динамического воздействия пляски на период колебаний, 25 (фиг. 3), ко входу пятого ключа 19 (фиг. 3), выход которого в свою очередь подключен ко входу пятого блока памяти 22 (фиг. 3), чей выход соединен с пятым входом блока 25 (фиг. 3), и ко входу счетчика времени 24 (фиг. 3), выход которого подключен к входу блока возведения в степень -1 26 (фиг. 3), чей выход соединен с третьим выходом устройства «Частота продольных колебаний провода fa» 29 (фиг. 3), выход блока, определяющего величину максимальной силы динамического воздействия пляски за период колебаний, 25 (фиг. 3) соединен со вторым выходом устройства «Сила динамического воздействия пляски FД.max» 28 (фиг. 3).
Блок определения модуля производной поперечного ускорения 10 (фиг. 3 и 4) содержит блок задержки сигнала поперечного ускорения ах 30 (фиг. 4), сумматор определения приращения поперечного ускорения ах 31 (фиг. 4), формирователь сигнала длительности задержки поперечного ускорения ах 32 (фиг. 4), делитель, определяющий значение производной поперечного ускорения ах 33 (фиг. 4), блок модуля производной поперечного ускорения ах 34 (фиг. 4), при этом выход второго канала телепередачи 8 (фиг. 3) соединен с первым входом сумматора 31 (фиг. 4) и входом блока задержки 30 (фиг. 4), выход которого подключен ко второму входу сумматора определения приращения поперечного ускорения ах 31 (фиг. 4), выход сумматора определения приращения поперечного ускорения ах 31 (фиг. 4) подключен к первому входу делителя, определяющего значение производной поперечного ускорения ах, 33 (фиг. 4), ко второму входу которого подключен выход формирователя сигнала длительности задержки поперечного ускорения ах 32 (фиг. 4), а выход делителя, определяющего значение производной поперечного ускорения ах, 33 (фиг. 4) подключен к входу блока модуля производной поперечного ускорения ах 34 (фиг. 4).
Блок определения модуля производной продольного ускорения 11 (фиг. 3 и 5) содержит блок задержки сигнала продольного ускорения ау 35 (фиг. 5), сумматор определения приращения продольного ускорения ау 36 (фиг. 5), формирователь сигнала длительности задержки продольного ускорения ау 37 (фиг. 5), делитель, определяющий значение производной продольного ускорения ау, 38 (фиг. 5), блок модуля производной продольного ускорения ау 39 (фиг. 5), при этом выход третьего канала телепередачи 9 (фиг. 3) соединен с первым входом сумматора определения приращения продольного ускорения ау 36 (фиг. 5) и входом блока задержки сигнала продольного ускорения ау 35 (фиг. 5), выход которого подключен ко второму входу сумматора определения приращения продольного ускорения ау 36 (фиг. 5), выход сумматора определения приращения продольного ускорения ау 36 (фиг. 5) подключен к первому входу делителя, определяющего значение производной продольного ускорения ау 38 (фиг. 5), ко второму входу которого подключен выход формирователя сигнала длительности задержки продольного ускорения ау 37 (фиг. 5), а выход делителя, определяющий значение производной продольного ускорения ау, 38 (фиг. 5) подключен к входу блока модуля производной продольного ускорения ау 39 (фиг. 5).
Блок, определяющий величину максимальной силы динамического воздействия пляски за период колебаний, 25 (фиг. 3 и 6) содержит первый умножитель, определяющий сигнал N22, 40 (фиг. 6) второй умножитель, определяющий сигнал ax22, 41 (фиг. 6), третий умножитель, определяющий сигнал ay22, 42 (фиг. 6), четвертый умножитель, определяющий сигнал N12, 43 (фиг. 6), пятый умножитель, определяющий сигнал ay12, 44 (фиг. 6), шестой умножитель, определяющий сигнал ax12,45 (фиг. 6), сумматор, определяющий сигнал N22-N12, 46 (фиг. 6), сумматор, определяющий сигнал суммы ax22, ay22, -ax12, -ay12, 47 (фиг. 6), первый делитель, определяющий частное суммы квадратов ускорений и ay12, 48 (фиг. 6), второй делитель, определяющий Fд.max2, 49 (фиг. 6), блок, определяющий корень второй степени Fд.max, 50 (фиг. 6), при этом первый блок памяти 15 (фиг. 3) соединен с двумя входами первого умножителя,, определяющего сигнал N22,40 (фиг. 6), второй блок памяти 16 (фиг. 3) соединен с двумя входами второго умножителя, определяющего сигнал ax22, 41 (фиг. 6), третий блок памяти 17 (фиг. 3) соединен с двумя входами третьего умножителя, определяющий сигнал ay22, 42 (фиг. 6), четвертый блок памяти 21 (фиг. 3) соединен с двумя входами четвертого умножителя, определяющий сигнал N12,43 (фиг. 6), пятый блок памяти 22 (фиг. 3) соединен с двумя входами пятого умножителя, определяющий сигнал ay12, 44, (фиг. 6) шестой блок памяти 23 (фиг. 3) соединен с двумя входами шестого умножителя, определяющий сигнал ax12, 45 (фиг. 6), первый вход сумматора, определяющего сигнал суммы ах22, ay22, -ax12, -ay12, 46 (фиг. 6) соединен с выходом первого умножителя, определяющего сигнал N22, 40 (фиг. 6), второй вход сумматора, определяющего сигнал суммы ах22, ay22, -ax12, -ay12, 46 (фиг. 6) соединен с выходом четвертого умножителя, определяющего сигнал N12, 43 (фиг. 6), первый вход сумматора, определяющего сигнал суммы ax22, ay22, -ax12, -ay12, 47 (фиг. 6) соединен с выходом второго умножителя, определяющего сигнал ax22, 41 (фиг. 6), второй вход сумматора, определяющего сигнал суммы ах22, ay22, -ax12, -ay12, 47 (фиг. 6) соединен с выходом третьего умножителя, определяющий сигнал ay22, 42 (фиг. 6), третий вход сумматора, определяющего сигнал суммы ах22, ay22, -ax12, -ay12, 47 (фиг. 6) соединен с выходом пятого умножителя, определяющего сигнал ay12, 44 (фиг. 6), четвертый вход сумматора, определяющего сигнал суммы ах22, ay22, -ax12, -ay12, 47 (фиг. 6) соединен с выходом шестого умножителя, определяющий сигнал ax12, 45 (фиг. 6), выход сумматора, определяющего сигнал суммы ах22, ay22, -ax12, -ay12, 47 (фиг. 6) соединен с первым входом первого делителя, определяющего частное суммы квадратов ускорений и ay12, 48 (фиг. 6), на второй вход которого поступает сигнал с выхода пятого умножителя, определяющего сигнал ay12, 44 (фиг. 6), на первый вход второго делителя, определяющего FД.max2, 49 (фиг. 6), поступает сигнал с выхода сумматора, определяющего сигнал суммы ах22, ay22, -ax12, -ay12, 46 (фиг. 6), на второй вход второго делителя, определяющего FД.max2, 49 (фиг. 6) поступает сигнал с выхода первого делителя, определяющего частное суммы квадратов ускорений и ay12, 48 (фиг. 6), выход второго делителя,, определяющего FД.max2, 49 (фиг. 6) подключен к входу блока, определяющего корень второй степени FД.max 50(фиг. 6).
Для реализации устройства может быть использован силоизмерительный датчик ДСЭл-02, двухосевой датчик ускорения провода представлен трехосевым цифровым акселерометром ADXL345. Оперирование данными, а также расчет и регистрация величин максимальной силы и частоты динамического воздействия выполнены программно на 8-битном микроконтроллере ATmega168A.
Способ регистрации гололедно-ветровой нагрузки и пляски проводов на ВЛЭП осуществляется следующим образом. В месте крепления провода промежуточного пролета к гирлянде изоляторов, подвешенной к траверсе на стойке опоры ВЛЭП, одновременно измеряют величину силы, вызванной гололедно-ветровой нагрузкой, величину и направление продольного ускорения провода, величину и направление поперечного ускорения провода.
В общем случае значение гололедно-ветровой нагрузки описывается формулой:

Р - вес провода с гололедными отложениями;
Рв - ветровая нагрузка;
Fд - сила динамического воздействия пляски.
В крайней точке по продольной оси в случае эллиптической траектории колебаний значение гололедно-ветровой нагрузки:

Рв.1 - ветровая нагрузка в данной точке;
Fд.1=Fд.max - сила динамического воздействия пляски в данной точке равная максимальной силе, которую необходимо зарегистрировать.
Чтобы отстроиться от веса провода с гололедными отложениями, рассматривают крайнюю точку колебаний по поперечной оси, при этом

Рв.2 - ветровая нагрузка в данной точке,
Fд.2 - сила динамического воздействия пляски в данной точке.
При прохождении крайней точки колебаний по продольной оси и крайней точки колебаний по поперечной оси производят регистрацию значений:

ax1 - поперечное ускорение в крайней точке колебаний по поперечной оси;
ay1 - продольное ускорение в крайней точке по поперечной оси;
ах2 - поперечное ускорение в крайней точке по продольной оси;
ay2 - продольное ускорение в крайней точке по продольной оси.
Рассмотрим разность двух последних уравнений:

Рассматриваемые силы пропорциональны друг другу так же, как и ускорения, которые они создают, таким образом

Подставляя данные выражения в уравнение

и упрощая его, получим формулу (1). Согласно формуле (1) по зарегистрированным величинам определяется максимальная сила динамического воздействия пляски:

В то же время, измерение периода колебаний продольного ускорения позволяет определить частоту продольных колебаний провода и вызывающей их силы.
Устройство регистрации гололедно-ветровой нагрузки и пляски проводов на ВЛЭП работает следующим образом:
устройство содержит силоизмерительный датчик 1 (фиг. 1 и 3), размещенный в месте крепления провода 2 (фиг. 1 и 3) к гирлянде изоляторов 3 (фиг. 1 и 3), подвешенной к траверсе изоляторов 4 (фиг. 1 и 3) на стойке опоры ВЛЭП 5 (фиг. 1 и 3), двухосевой датчик ускорения провода 6 (фиг. 1 и 3), установленный на провод 2 (фиг. 1 и 3) у места его крепления к силоизмерительному датчику 1 (фиг. 1 и 3).
В общем случае значение гололедно-ветровой нагрузки описывается формулой:

где Р - вес провода с гололедными отложениями,
Рв - етровая нагрузка,
Fд - сила динамического воздействия пляски.
В крайней точке по продольной оси в случае эллиптической траектории колебаний значение гололедно-ветровой нагрузки:

где Рв.1 - ветровая нагрузка в данной точке;
Fд.1=Fд.max - максимальная сила динамического воздействия пляски.
Чтобы отстроиться от веса провода с гололедными отложениями, рассматривают крайнюю точку колебаний по поперечной оси, при этом

где Рв.2 - максимальная ветровая нагрузка;
Fд.2 - сила динамического воздействия пляски в данной точке, а затем рассматривают разность двух последних уравнений:

Рассматриваемые силы пропорциональны друг другу так же, как и ускорения, которые они создают, таким образом

Подставляя данные выражения в уравнение:

упрощая его, получим формулу (1).
В крайних точках по поперечной и продольной оси поперечное ах и продольное ау ускорения будут максимальны, следовательно, производные ускорений в этих точках будут равны нулю ах'=0 и ау'=0. Двухосевой датчик ускорения провода 6 (фиг. 1 и 3) передает данные о поперечном ускорении посредством второго канала телепередачи 8 (фиг. 3) на вход блока определения модуля производной поперечного ускорения 10 (фиг. 3), а данные о продольном ускорении посредством третьего канала телепередачи 9 (фиг. 3) на вход блока определения модуля производной продольного ускорения 11 (фиг. 3). При прохождении крайней точки по поперечной оси блок определения модуля производной поперечного ускорения 10 (фиг. 3) рассчитывает

и, согласно условию  первый ключ 12 (фиг. 3) открывает связь для передачи данных силоизмерительного датчика 1 (фиг. 1 и 3) посредством первого канала 7 (фиг. 3) телепередачи на вход первого блока памяти 15 (фиг. 3), второй ключ 13 (фиг. 3) открывает связь для передачи данных о поперечном ускорении от двухосевого датчика ускорения провода 6 (фиг. 1 и 3) посредством второго канала 8 (фиг. 3) телепередачи на вход второго блока памяти 16 (фиг. 3), третий ключ 14 (фиг. 3) открывает связь для передачи данных о продольном ускорении от двухосевого датчика ускорения провода 6 (фиг. 3) посредством третьего канала телепередачи 9 (фиг. 3) на вход третьего блока памяти 17 (фиг. 3). Таким образом, в первый блок памяти 15 (фиг. 3) записывается значение гололедно-ветровой нагрузки N2 в крайней точке траектории колебаний по поперечной оси, во второй блок памяти 16 (фиг. 3) записывается значение поперечного ускорения ax2 в крайней точке траектории колебаний по поперечной оси, в третий блок памяти 17 (фиг. 3) записывается значение продольного ускорения ay2 в крайней точке траектории колебаний по поперечной оси. После завершения прохода крайней точки по поперечной оси
первый ключ 12 (фиг. 3) открывает связь для передачи данных силоизмерительного датчика 1 (фиг. 1 и 3) посредством первого канала 7 (фиг. 3) телепередачи на вход первого блока памяти 15 (фиг. 3), второй ключ 13 (фиг. 3) открывает связь для передачи данных о поперечном ускорении от двухосевого датчика ускорения провода 6 (фиг. 1 и 3) посредством второго канала 8 (фиг. 3) телепередачи на вход второго блока памяти 16 (фиг. 3), третий ключ 14 (фиг. 3) открывает связь для передачи данных о продольном ускорении от двухосевого датчика ускорения провода 6 (фиг. 3) посредством третьего канала телепередачи 9 (фиг. 3) на вход третьего блока памяти 17 (фиг. 3). Таким образом, в первый блок памяти 15 (фиг. 3) записывается значение гололедно-ветровой нагрузки N2 в крайней точке траектории колебаний по поперечной оси, во второй блок памяти 16 (фиг. 3) записывается значение поперечного ускорения ax2 в крайней точке траектории колебаний по поперечной оси, в третий блок памяти 17 (фиг. 3) записывается значение продольного ускорения ay2 в крайней точке траектории колебаний по поперечной оси. После завершения прохода крайней точки по поперечной оси  и ключи 12-14 (фиг. 3) размыкаются. При прохождении крайней точки по продольной оси блок определения модуля производной продольного ускорения 11 (фиг. 3) рассчитывает
и ключи 12-14 (фиг. 3) размыкаются. При прохождении крайней точки по продольной оси блок определения модуля производной продольного ускорения 11 (фиг. 3) рассчитывает  и, согласно условию
и, согласно условию  четвертый ключ 18 (фиг. 3) открывает связь для передачи данных силоизмерительного датчика 1 (фиг. 1) посредством первого канала телепередачи 7 (фиг. 3) на вход четвертого блока памяти 21 (фиг. 3), пятый ключ 19 (фиг. 3) открывает связь для передачи данных о продольном ускорении от двухосевого датчика ускорения провода 6 (фиг. 1) посредством третьего канала 9 (фиг. 3) телепередачи на вход пятого блока памяти 22 (фиг. 3), шестой ключ 20 (фиг. 3) открывает связь для передачи данных о поперечном ускорении от двухосевого датчика ускорения провода 6 (фиг. 1) посредством второго канала телепередачи 8 (фиг. 3) на вход шестого блока памяти 23 (фиг. 3). Таким образом, в четвертый блок памяти 21 (фиг. 3) записывается значение гололедно-ветровой нагрузки N1 в крайней точке траектории колебаний по продольной оси, в пятый блок памяти 22 (фиг. 3) записывается значение продольного ускорения ayi в крайней точке траектории колебаний по продольной оси, в шестой блок памяти 23 (фиг. 3) записывается значение поперечного ускорения ax1 в крайней точке траектории колебаний по продольной оси. Далее с выходов блоков памяти 15-17 (фиг. 3) и 21-23 (фиг. 3) данные поступают на входы блока 25 (фиг. 3), определяющего величину максимальной силы динамического воздействия пляски за период колебаний по формуле (1).
четвертый ключ 18 (фиг. 3) открывает связь для передачи данных силоизмерительного датчика 1 (фиг. 1) посредством первого канала телепередачи 7 (фиг. 3) на вход четвертого блока памяти 21 (фиг. 3), пятый ключ 19 (фиг. 3) открывает связь для передачи данных о продольном ускорении от двухосевого датчика ускорения провода 6 (фиг. 1) посредством третьего канала 9 (фиг. 3) телепередачи на вход пятого блока памяти 22 (фиг. 3), шестой ключ 20 (фиг. 3) открывает связь для передачи данных о поперечном ускорении от двухосевого датчика ускорения провода 6 (фиг. 1) посредством второго канала телепередачи 8 (фиг. 3) на вход шестого блока памяти 23 (фиг. 3). Таким образом, в четвертый блок памяти 21 (фиг. 3) записывается значение гололедно-ветровой нагрузки N1 в крайней точке траектории колебаний по продольной оси, в пятый блок памяти 22 (фиг. 3) записывается значение продольного ускорения ayi в крайней точке траектории колебаний по продольной оси, в шестой блок памяти 23 (фиг. 3) записывается значение поперечного ускорения ax1 в крайней точке траектории колебаний по продольной оси. Далее с выходов блоков памяти 15-17 (фиг. 3) и 21-23 (фиг. 3) данные поступают на входы блока 25 (фиг. 3), определяющего величину максимальной силы динамического воздействия пляски за период колебаний по формуле (1).
Данные о продольном ускорении от третьего канала телепередачи поступают на вход счетчика времени 24 (фиг. 3), который начинает отсчет времени с момента, когда продольное ускорение возрастает более нуля, а затем, при повторном возрастании при переходе через ноль отправляет подсчитанную величину времени на вход блока возведения в степень -1 26 (фиг. 3), который рассчитывает частоту колебаний по формуле

Использование предложенного способа и устройства для его реализации обеспечивает возможность одновременного измерения в реальном масштабе времени гололедно-ветровой нагрузки и регистрации величин максимальной силы и частоты динамического воздействия на стойку и траверсу опоры ВЛЭП за период колебаний во время пляски провода без использования V-образной подвески провода и в отсутствии наблюдателя на контролируемом участке ВЛЭП.
Источники информации:
1. Мониторинг воздушных линий электропередачи, эксплуатируемых в экстремальных метеоусловиях: монография / В.Я. Башкевич, Г.Г. Угаров, П.А. Кузнецов, С.Б. Стебеньков. - Саратов: Сарат. гос. техн. ун-т, 2013. - 244 с.
2. А.С. 556528 (СССР). Способ обнаружения «пляски» проводов воздушных линий электропередачи / М.И. Пронникова, А.И. Селивахин // 23.04.74. Бюл. №16.
3. А.С. 1647728 (СССР). Способ обнаружения «пляски» проводов воздушных линий электропередачи и устройство для его осуществления / Г.X. Карабаев, Т.А. Кулиев // 09.03.89. Бюл. №17.
4. А.С. 1721685 (СССР). Устройство обнаружения «пляски» проводов воздушных линий электропередачи / Г.X. Карабаев // 01.03.90. Бюл. №11.
5. А.С. 1742923 (СССР) Способ обнаружения «пляски» проводов воздушных линий электропередачи / Г.X. Карабаев // 01.03.90. Бюл. №23.
6. Патент на изобретение РФ №2016450. Способ обнаружения гололеда и «пляски» проводов на воздушных линиях электропередачи / Ч.А. Аманмамедов, Г.X. Карабаев, Т.А. Кулиев, С.С. Суханов // МПК H02G 7/14,1994.
7. Патент на изобретение РФ №2016451. Устройство для обнаружения гололеда и «пляски» проводов воздушных линий электропередачи / Г.X. Карабаев, Т.А. Кулиев // МПК H02G 7/14, 1994.
8. Патент на изобретение РФ №2023336. Способ обнаружения «пляски» проводов / Г.X. Карабаев, Т.А. Кулиев, С.С. Суханов // МПК H02G 7/14, 1991.
9. Патент на изобретение РФ №2017297. Способ определения пляски проводов / В.Ю. Кабашов // МПК H02G 7/14, 1994.
10. Патент на изобретение РФ №2314616. Способ обнаружения предвестника пляски провода промежуточного пролета воздушной линии электропередачи и устройство для его осуществления / П.А. Кузнецов, В.Я. Башкевич // МПК H02G 7/16, 2006.


Использование: в области электроэнергетики для регистрации величин силы и частоты динамического воздействия пляски провода на стойку и траверсу опоры ВЛЭП. Технический результат - обеспечение одновременного измерения в режиме реального времени гололедно-ветровой нагрузки и регистрация величин максимальной силы и частоты динамического воздействия на стойку и траверсу опоры ВЛЭП за период колебаний во время пляски провода без использования V-образной подвески провода и в отсутствие наблюдателя на контролируемом участке ВЛЭП. Способ регистрации гололедно-ветровой нагрузки и пляски проводов на ВЛЭП заключается в том, что в месте крепления провода промежуточного пролета к гирлянде изоляторов одновременно измеряют величины гололедной и ветровой нагрузок на провод и величину продольного ускорения провода, эти величины сравнивают с соответствующими пороговыми значениями, а в месте крепления провода промежуточного пролета к гирлянде изоляторов, подвешенной к траверсе на стойке опоры ВЛЭП, одновременно измеряют следующее: величину силы, вызванной гололедно-ветровой нагрузкой, величину и направление продольного ускорения провода, величину и направление поперечного ускорения провода; производят регистрацию значений силы, продольного и поперечного ускорений в моменты времени, когда продольное и поперечное ускорения достигают максимальных значений, затем проводят вычисление максимальной силы динамического воздействия, пропорциональной измеренному продольному ускорению и направленной вдоль оси визирования ВЛЭП, а также определяют частоту изменения этой силы по частоте изменения продольного ускорения провода. 2 н. и 3 з.п. ф-лы, 6 ил.
1. Способ регистрации гололедно-ветровой нагрузки и пляски проводов на воздушной линии электропередач (ВЛЭП), заключающийся в том, что в месте крепления провода промежуточного пролета к гирлянде изоляторов одновременно измеряют величины гололедной и ветровой нагрузок на провод и величину продольного ускорения провода, эти величины сравнивают с соответствующими пороговыми значениями,
отличающийся тем, что в месте крепления провода промежуточного пролета к гирлянде изоляторов, подвешенной к траверсе на стойке опоры ВЛЭП, одновременно измеряют следующее:
- величину силы, вызванной гололедно-ветровой нагрузкой,
- величину и направление продольного ускорения провода,
- величину и направление поперечного ускорения провода;
производят регистрацию значений силы, продольного и поперечного ускорений в моменты времени, когда продольное и поперечное ускорения достигают максимальных значений, затем проводят вычисление максимальной силы динамического воздействия, пропорциональной измеренному продольному ускорению и направленной вдоль оси визирования ВЛЭП, а также определяют частоту изменения этой силы по частоте изменения продольного ускорения провода.
2. Устройство для реализации заявленного способа регистрации гололедно-ветровой нагрузки и пляски проводов на ВЛЭП, содержащее силоизмерительный датчик, размещенный в месте крепления провода к гирлянде изоляторов, подвешенной к траверсе на стойке опоры ВЛЭП, датчик ускорения провода, установленный на провод у места его крепления к силоизмерительному датчику, первый, второй и третий каналы телепередачи, отличающееся тем, что в качестве датчика ускорения провода использован двухосевой датчик ускорения провода, измеряющий продольное и поперечное ускорения провода, дополнительно введены блок определения модуля производной поперечного ускорения, блок определения модуля производной продольного ускорения, первый, второй и третий ключи, срабатывающие при значении модуля производной поперечного ускорения, близком к нулю, первый блок памяти, запоминающий значение силы в крайней точке траектории колебаний гирлянды по поперечной оси, второй блок памяти, запоминающий значение поперечного ускорения в крайней точке траектории колебаний гирлянды по поперечной оси, третий блок памяти, запоминающий значение продольного ускорения в крайней точке траектории колебаний гирлянды по поперечной оси, четвертый, пятый и шестой ключи, срабатывающие при значении модуля производной продольного ускорения, близком к нулю, четвертый блок памяти, запоминающий значение силы в крайней точке траектории колебаний гирлянды по продольной оси, пятый блок памяти, запоминающий значение продольного ускорения в крайней точке траектории колебаний гирлянды по продольной оси, шестой блок памяти, запоминающий значение поперечного ускорения в крайней точке траектории колебаний гирлянды по продольной оси, счетчик времени, определяющий период колебаний продольного ускорения провода, блок, определяющий величину максимальной силы динамического воздействия пляски за период колебаний, блок возведения в степень -1, первый выход устройства «Гололедно-ветровая нагрузка N», второй выход устройства «Максимальная сила динамического воздействия пляски Fд.max», третий выход устройства «Частота продольных колебаний провода fa», при этом выход силоизмерительного датчика соединен с входом первого канала телепередачи, выход которого подключен к первому выходу устройства, к входу первого ключа, выход которого в свою очередь подключен к входу первого блока памяти, чей выход соединен с первым входом блока определения величины максимальной силы динамического воздействия, и к входу четвертого ключа, выход которого в свою очередь подключен к входу четвертого блока памяти, чей выход соединен с четвертым входом блока определения величины максимальной силы динамического воздействия, датчик ускорения передает данные о поперечном ускорении провода на вход второго канала телепередачи, выход которого подключен к входу блока определения модуля производной поперечного ускорения, соединенного своим выходом с управляющими входами первого, второго и третьего ключей и приводящего их в действие при близости модуля производной поперечного ускорения к нулю, к входу второго ключа, выход которого в свою очередь подключен к входу второго блока памяти, чей выход соединен со вторым входом блока определения величины максимальной силы динамического воздействия, и ко входу шестого ключа, выход которого в свою очередь подключен ко входу шестого блока памяти, чей выход соединен с шестым входом блока определения величины максимальной силы динамического воздействия, датчик ускорения передает данные о продольном ускорении провода на вход третьего канала телепередачи, выход которого подключен к входу блока определения модуля производной продольного ускорения, соединенного своим выходом с управляющими входами четвертого, пятого и шестого ключей и приводящего их в действие при близости модуля производной продольного ускорения к нулю, к входу третьего ключа, выход которого в свою очередь подключен к входу третьего блока памяти, чей выход соединен с третьим входом блока определения величины максимальной силы динамического воздействия, ко входу пятого ключа, выход которого в свою очередь подключен ко входу пятого блока памяти, чей выход соединен с пятым входом блока определения величины максимальной силы динамического воздействия, и ко входу счетчика времени, выход которого подключен ко входу блока возведения в степень -1, чей выход в свою очередь соединен с третьим выходом устройства, а выход блока определения величины максимальной силы динамического воздействия соединен со вторым выходом устройства.
3. Устройство по п. 2, отличающееся тем, что блок определения модуля производной поперечного ускорения содержит блок задержки сигнала поперечного ускорения ах, сумматор определения приращения поперечного ускорения ах, формирователь сигнала длительности задержки поперечного ускорения ах, делитель, определяющий значение производной поперечного ускорения ах, блок модуля производной поперечного ускорения ах, при этом выход второго канала телепередачи соединен с первым входом сумматора определения приращения поперечного ускорения ах и входом блока задержки поперечного ускорения ах, выход которого подключен ко второму входу сумматора определения приращения поперечного ускорения ах, выход сумматора определения приращения поперечного ускорения ах подключен к первому входу делителя, определяющего значение производной поперечного ускорения ах, ко второму входу которого подключен выход формирователя сигнала длительности задержки поперечного ускорения ах, а выход делителя, определяющего значение производной поперечного ускорения ах, подключен к входу блока модуля производной поперечного ускорения ах.
4. Устройство по п. 2, отличающееся тем, что блок определения модуля производной продольного ускорения содержит блок задержки сигнала продольного ускорения ау, сумматор определения приращения продольного ускорения ау, формирователь сигнала длительности задержки продольного ускорения ау, делитель, определяющий значение производной продольного ускорения ау, блок модуля производной продольного ускорения ау, при этом выход третьего канала телепередачи соединен с первым входом сумматора определения приращения продольного ускорения ау и входом блока задержки сигнала продольного ускорения ау, выход которого подключен ко второму входу сумматора определения приращения продольного ускорения ау, выход сумматора определения приращения продольного ускорения ау подключен к первому входу делителя, определяющего значение производной продольного ускорения ау, ко второму входу которого подключен выход формирователя сигнала длительности задержки продольного ускорения ау, а выход делителя, определяющего значение производной продольного ускорения ау, подключен к входу блока модуля производной продольного ускорения ау.
5. Устройство по п. 2, отличающееся тем, что блок, определяющий величину максимальной силы динамического воздействия пляски за период колебаний, содержит первый умножитель, определяющий сигнал N22, второй умножитель, определяющий сигнал ах22, третий умножитель, определяющий сигнал ay22, четвертый умножитель, определяющий сигнал N12, пятый умножитель, определяющий сигнал ay12, шестой умножитель, определяющий сигнал ax12, сумматор, определяющий сигнал N22-N12, сумматор, определяющий сигнал суммы ах22, ay22, -ax12, -ay12, первый делитель, определяющий частное суммы квадратов ускорений и ay12, второй делитель, определяющий Fд.max2, блок, определяющий корень второй степени Fд.max, при этом первый блок памяти соединен с двумя входами первого умножителя, второй блок памяти соединен с двумя входами второго умножителя, третий блок памяти соединен с двумя входами третьего умножителя, четвертый блок памяти соединен с двумя входами четвертого умножителя, пятый блок памяти соединен с двумя входами пятого умножителя, шестой блок памяти соединен с двумя входами шестого умножителя, первый вход сумматора, определяющего сигнал N22-N12, соединен с выходом первого умножителя, второй вход сумматора соединен с выходом четвертого умножителя, первый вход сумматора, определяющего сигнал суммы ax22, ay22, -ax12, -ay12, соединен с выходом второго умножителя, второй вход сумматора соединен с выходом третьего умножителя, третий вход сумматора соединен с выходом пятого умножителя, четвертый вход сумматора соединен с выходом шестого умножителя, выход сумматора соединен с первым входом первого делителя, на второй вход которого поступает сигнал с выхода пятого умножителя, на первый вход второго делителя поступает сигнал с выхода сумматора, определяющего сигнал N22-N12, на второй вход второго делителя поступает сигнал с выхода первого делителя, выход второго делителя подключен к входу блока, определяющего корень второй степени Fд.max.
| СПОСОБ ОБНАРУЖЕНИЯ ПРЕДВЕСТНИКА ПЛЯСКИ ПРОВОДА ПРОМЕЖУТОЧНОГО ПРОЛЕТА ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2314616C1 |
| УСТРОЙСТВО ТЕЛЕИЗМЕРЕНИЯ ГОЛОЛЕДНОЙ, ВЕТРОВОЙ И ГОЛОЛЕДНО-ВЕТРОВОЙ НАГРУЗОК НА ФАЗНЫЙ ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ С ИНДИКАЦИЕЙ ОТНОСИТЕЛЬНОГО НАПРАВЛЕНИЯ ВЕТРА | 2004 |
|
RU2255402C1 |
| Устройство для измельчения и транспортировки отходов картона | 1954 |
|
SU100682A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛЯСКИ ПРОВОДОВ | 1991 |
|
RU2017297C1 |
| US 9488670 B2, 08.11.2016. | |||

