Область техники, к которой относится изобретение
Изобретение имеет отношение к винтам, и касается в частности несущих винтов (НВ) винтокрылых летательных аппаратов (ВКЛА), например, вертолетов.
Уровень техники
Одним из направлений совершенствования вертолетов является увеличение максимального аэродинамического качества ИВ. Одним из путей увеличения максимального аэродинамического качества НВ вертолета рассматривается индивидуальное управление углом установки каждой лопасти НВ (Итоги науки и техники // Сер. Авиастроение: Зарубежные вертолеты. Т. 10. М.: ВИНИТИ. 1989, с. 18, [1]). Индивидуальное управление углом установки каждой лопасти НВ позволяет, теоретически, вне зависимости от азимутального положения лопасти НВ и от режима полета вертолета, устанавливать лопасть НВ под такие углы атаки, по отношению к набегающему на лопасть потоку воздуха, при которых реализуется максимальное аэродинамическое качество лопасти НВ.
Несмотря на то что идея индивидуального управления углом установки каждой лопасти НВ вертолета известна давно, например, из (Европейская заявка ЕР 0870676 B1, В64С 27/605, опубл. 28.05.2003, [2]) и (Европейская заявка ЕР 1262403 А2, В64С 27/605, опубл. 04.12.2002, [3]), практически ни на одном серийном вертолете индивидуальное управление углом установки каждой лопасти НВ не реализовано. Это связано с тем, что создание индивидуального привода каждой лопасти НВ является непростой технической задачей.
В частности, в техническом решении, известном из [3], каждая лопасть НВ управляется индивидуальным гидроцилиндром (с поступательным движением штока), который вращается совместно с лопастью НВ. То есть, по существу, в данном техническом решении тяга управления лопастью заменена гидроцилиндром. Рабочая жидкость от гидронасосов (установленных на не вращающейся части вертолета) под высоким давлением подводится к вращающимся гидроцилиндрам.
Недостатки такого технического решения: трудности в подводе жидкости под высоким давлением к вращающемуся гидроцилиндру; большие габариты и вес всей системы индивидуального управления углом установки каждой лопасти НВ; большая сложность конструкции.
Другим направлением совершенствования вертолетов является увеличение скорости полета вертолетов. Одним из факторов, ограничивающих скорость полета вертолетов, является срыв потока на отступающих лопастях НВ (лопастях НВ, идущих в направлении против полета вертолета).
Увеличить скорость полета вертолета можно путем использования концепции наступающей лопасти, суть которой заключается в том, что подъемная сила на НВ создается только наступающими лопастями НВ (лопастями НВ, идущими в направлении по полету вертолета), а отступающие лопасти НВ устанавливаются на минимальные углы установки. Это позволяет исключить срыв потока на отступающих лопастях НВ. Концепция наступающей лопасти требует наличие жесткого НВ. Возникающий при этом несбалансированный поперечный момент уравновешивается за счет использования соосной схемы - двух жестких НВ, вращающихся в противоположных направлениях.
Концепция наступающей лопасти была реализована в 60÷70-е годы ХХ-го века на экспериментальном вертолете S-69 компании Sikorsky (США). В 1981 года на вертолете S-69 достигнута скорость горизонтального полета 518 км/ч (Исследования по истории и теории развития авиационной и ракетно-космической науки и техники. Выпуск 4. М: Наука. 1985, с. 148, [4]).
Недостатки концепции наступающей лопасти: большая сложность и большой относительный вес двух жестких соосных НВ; высокий уровень вибраций при максимальной скорости полета вертолета.
Вертолеты одновинтовой схемы имеют наибольшую весовую отдачу по полезной нагрузке.
Однако, фактором, ограничивающим дальнейшее увеличение скорости полета вертолетов одновинтовой схемы, является срыв потока на отступающих лопастях НВ. Это обусловлено, в том числе, особенностью конструкции используемого на вертолетах кинематического механизма, управляющего углами установки лопастей НВ, и служащего для изменения общего и циклического шага лопастей НВ. В качестве такого кинематического механизма на известных вертолетах применяется автомат перекоса (АП), который, в наиболее широко используемом варианте своего конструктивного исполнения, представляет собой, одно не вращающееся кольцо, и одно вращающееся кольцо, соединенные между собой подшипником. Вращающееся кольцо присоединяется к рычагам лопастей НВ при помощи тяг и крепится к валу НВ на универсальном шарнире (кардане) или шаровой опорой. К не вращающемуся кольцу прикреплены тяги, идущие от ручки управления вертолетом (или от гидроусилителей системы управления вертолетом). Наклон не вращающегося и вращающегося колец в продольной и поперечной плоскостях посредством тяг (или гидроусилителей), идущих от ручки управления вертолетом, приводит к циклическому изменению угла установки лопастей НВ, тем самым меняется величина и направление равнодействующей аэродинамической силы НВ. Таким образом, углы установки лопастей НВ в секторах левой, передней, правой и задней четвертей диска НВ однозначно связаны между собой.
Из (Ворогушин В.А. Устройство для управления несущим винтом вертолета по второй гармонике // Материалы 2-го Российского вертолетного форума. М.: 1996, с. VI-100÷VI-114, [5]) известно техническое решение, позволяющее у вертолетов одновинтовой схемы отодвинуть срыв потока на отступающих лопастях НВ до большей скорости полета, а, следовательно, позволяющее увеличить скорость полета вертолета, по сравнению с обычными вертолетами одновинтовой схемы. Его суть заключается в том, что сектора передней и задней четвертей диска НВ догружаются, а сектора левой и правой четвертей диска НВ разгружаются, что позволяет устранить срыв потока на отступающих лопастях НВ (на азимуте 270°). Это эффективнее, чем использование крыла, так как не снижает величины тяги НВ. Компенсация потерь тяги в секторах левой и правой четвертей диска НВ требуют меньших приращений угла установки лопастей НВ. Это обеспечивается применением, наряду с известным механическим АП, системы активного управления шагом (САУШ) НВ. АП и САУШ работают совместно. В азимутах 0-90° и 180-270°САУШ уменьшает угол установки лопастей НВ, а в азимутах 90-180° и 270-360°САУШ увеличивает угол установки лопастей НВ. Работа САУШ требует наличия на вертолете специального агрегата - автомата коррекции (АК). Работа АК основана на деформации упругих колец внутренней и наружной обоймы главного подшипника АК под действием диаметрального усилия от гидравлического цилиндра. В результате образуется эллипс, большая ось которого всегда расположена по полету с учетом угла опережения. Разница в размерах большой и малой полуосей эллипса по величине будет равна амплитуде изменения шага НВ.
Недостатки вышеуказанного технического решения: сложность и громоздкость кинематического механизма управления углом установки лопастей НВ; ограниченный диапазон, увеличения шага лопастей НВ, находящихся в секторах передней и задней четвертей диска НВ, и уменьшения шага лопастей НВ, находящихся в секторах левой и правой четвертей диска НВ, обеспечиваемый работой АК, по сравнению с диапазоном изменения шага лопастей НВ, обеспечиваемым известным механическим АП у известных вертолетов одновинтовой схемы.
У известных вертолетов с классической трехшарнирной втулкой НВ (Курочкин Ф.П. Конструирование винтов, силовых установок и приводов вертолета. М.: МАИ, 1980, с. 18, рис. 2.4, [6]) осевой шарнир втулки НВ имеет: цапфу осевого шарнира; корпус осевого шарнира; два радиальных подшипника; один упорный роликовый подшипник с повернутыми роликами.
В приводной технике широко используются лопастные неполноповоротные гидродвигатели (квадранты). Квадрант имеет корпус цилиндрической формы, в котором имеется, по меньшей мере, две рабочие камеры (в которые, или подается рабочая жидкость под определенным избыточным давлением, или из которых сливается рабочая жидкость), разделенные между собой лопастью. Лопасть квадранта имеет выходной вал, к которому крепится приводимый механизм. У квадранта лопасть (со своим выходным валом) выполнена с возможностью совершения возвратно-вращательных перемещений в обоих направлениях относительно неподвижного корпуса квадранта. Возможно и наоборот - корпус квадранта выполнен с возможностью совершения возвратно-вращательных перемещений в обоих направлениях относительно неподвижной лопасти квадранта. В ряде случаев квадранты позволяют упростить кинематику привода, по сравнению с приводом, где используются гидроцилиндры с поступательным движением штока.
Квадранты имеют следующие технические характеристики: развиваемый крутящий момент - 17,2÷440000 килограмм силы на метр (кгс⋅м); давление рабочей жидкости - 17,5÷210 килограмм силы на сантиметр квадратный (кгс/см2); максимальный угол поворота выходного вала лопасти, у однолопастных квадрантов - 280÷300°, у двухлопастных квадрантов - 120÷140°, у трехлопастных квадрантов - 40÷55° (Петров Е.М., Юзефович Ю.И. Лопастные неполноповоротные гидродвигатели в судостроении. Л.: Судостроение, 1972, с. 8÷9, [7])
У квадрантов, используемых в станочных приводах, при давлении рабочей жидкости 16 мегапаскалей (МПа), максимальная угловая скорость поворота выходного вала лопасти квадранта равна 180 градусов в секунду (°/сек) (Свешников В.К. Станочные гидроприводы. М.: Машиностроение, 1995, с. 60, табл. 3, 9, [8])
У отечественного авиационного однолопастного квадранта ЭГП-5АМ, при давлении рабочей жидкости 27,0÷29 МПа (~270÷290 кгс/см2), максимальная угловая скорость поворота выходного вала лопасти квадранта равна 200÷240°/с (Гидравлические агрегаты и приводы систем управления полетом летательных аппаратов. М.. 2004, с. 378÷279, [9]).
В различных областях техники, например, в топливных насосах высокого давления (ТНВД), широко используются кулачковые приводные механизмы. У рядного четырехсекционного ТНВД ТН-8,5х10 (Кислов В.Г. и др. Конструирование и производство топливной аппаратуры тракторных дизелей. М.: Машиностроение, 1971, с. 17, рис. 5, [10]) кулачковый приводной механизм имеет, подпружиненный плунжер, толкатель, с установленным на одном его конце на оси роликом, кулачковый вал. В процессе работы ТНВД подпружиненный плунжер воздействует на толкатель, прижимая ролик последнего к кулачку кулачкового вала. Такая конструкция устойчиво работает при нескольких тысячах оборотов в минуту кулачкового вала.
Наиболее близким к заявляемому изобретению является техническое решение, предложенное немецким научным центром ZF (Luftfahrttechnik GmbH), известное из (Анимица В.А., Борисов Е.А., Крицкий Б.С., Мир-газов P.M. Анализ расчетно-экспериментальных исследований по системам индивидуального управления лопастями винта вертолета // Труды МАИ. Выпуск №85 // http://www.mai.m/upload/iblock/5da/animitsa_borisov_kritskiy_mirgazov_rus.pdf, с. 13, [11]). Данное техническое решение представляет собой единую электрическую систему управления общим и циклическим шагом лопастей НВ, а также индивидуальное управление углом установки каждой лопасти НВ. Суть системы состоит в том, что вместо известного механического АП применяются синхронные электродвигатели с редуктором, встроенные в конструкцию осевых шарниров втулки НВ. Угол установки каждой лопасти НВ управляется своим синхронным электродвигателем с редуктором.
Недостатки прототипа: большие габаритные размеры и удельный вес синхронного электродвигателя с редуктором; небольшой срок службы редуктора.
Раскрытие изобретения
Задачей заявляемого изобретения является упрощение конструкции, снижение веса и габаритных размеров, как самой втулки НВ, так и системы индивидуального управления углом установки каждой лопастью НВ, а также повышение надежности и срока службы, по сравнению с прототипом.
Очевидно, если такая задача может быть решена, то это «неочевидное» решение для специалиста, сведущего в соответствующей области техники, поскольку у прототипа и у других известных автору аналогов она не решена.
Заявляемое изобретение, в одном из возможных вариантов его исполнения, имеет следующие общие с прототипом существенные признаки: винт, например, несущий винт вертолета, имеет, втулку НВ, лопасти НВ, каждая лопасть НВ выполнена с возможностью управления углом ее установки, втулка НВ имеет корпус втулки.
Отличительными от прототипа существенными признаками являются: управление углом установки каждой лопасти НВ выполнено посредством своего для каждой лопасти НВ лопастного неполноповоротного гидродвигателя, установленного на втулке НВ и выполненного с возможностью взаимодействия с корпусом втулки НВ и с управляемой им лопастью НВ, на втулке НВ также расположены, емкость с рабочей жидкостью, выполненная с возможностью питания вышеуказанных неполноповоротных гидродвигателей, золотники, выполненные с возможностью управления подачей вышеуказанной рабочей жидкости в рабочие камеры вышеуказанных лопастных неполноповоротных гидродвигателей, при этом, для каждого лопастного неполноповоротного гидродвигателя имеется свой золотник, по меньшей мере, один гидронасос, выполненный с возможностью подачи рабочей жидкости в рабочие камеры вышеуказанных лопастных неполноповоротных гидродвигателей, по меньшей мере, один фильтр, выполненный с возможностью очистки вышеуказанной рабочей жидкости.
Таким образом, задача заявляемого изобретения решается тем, что у него для управления углом установки каждой лопасти НВ используется свой для каждой лопасти НВ лопастной неполноповоротный гидродвигатель, что упрощает конструкцию, снижает вес и габаритные размеры, а также повышает надежность работы системы управления лопастями НВ. При этом, втулка НВ представляет собой интегральный узел, включающий в себя, помимо корпуса втулки НВ и лопастей НВ, также лопастные неполноповоротные гидродвигатели, емкость с рабочей жидкостью, гидронасос, золотники и фильтр.
Краткое описание чертежей
На ФИГ. 1÷8 показан один из возможных вариантов исполнения заявляемого изобретения в варианте втулки НВ вертолета одновинтовой схемы, где цифрами обозначено (обозначения идентичны для всех фигур чертежей): 1 - корпус втулки НВ; 2 - верхняя крышка корпуса втулки НВ; 3 и 4 - корпусы осевых шарниров втулки НВ; 5 и 6 - лопасти НВ; 7 - вал НВ; 8 - ползун; 9 - поворотный корпус; 9вп - положение поворотного корпуса 9 при его наклоне вперед; 9нз - положение поворотного корпуса 9 при его наклоне назад; 10 - шайба управления; 10вх - положение шайбы управления 10 при ее отклонении вверх; 10вн - положение шайбы управления 10 при ее отклонении вниз; 11 - вал привода гидронасосов; 12 - гидроблок; 13 - центральный корпус лопастного неполноповоротного гидродвигателя; 14 и 15 - передняя и задняя боковые крышки лопастного неполноповоротного гидродвигателя, соответственно; 16 - вал лопастного неполноповоротного гидродвигателя; 17 и 18 -лопасти лопастного неполноповоротного гидродвигателя; 19-22 - входные (и выходные) окна в торце вала 16; 23 и 24 - каналы в лопасти 17; 25 и 26 - каналы в лопасти 18; 27-30 - рабочие камеры лопастного неполноповоротного гидродвигателя; 31 - плоский торцевый золотник; 32 - рычаг золотника 31; 33 - пружина сжатия золотника 31; 34 и 35 -отверстия в золотнике 31; 36 - упор в передней боковой крышке 14 для пружины 33; 37 и 38 - стержни толкателей; 39 ролик толкателя; 40 - ось толкателя; 41 и 42 - радиальные игольчатые подшипники осевого шарнира лопасти НВ 5; 43 - упорный роликовый подшипник с повернутыми роликами осевого шарнира лопасти НВ 5; 44 - переднее кольцо; 45 -заднее кольцо; 46 и 47 - гайки; 48 - уплотнение; 49 - упорное кольцо; 50 - стопорное кольцо; 51 - емкость с рабочей жидкостью; 52 - хорда лопасти НВ 5; 53 - прямая, лежащая в плоскости вращения лопасти НВ 5.
На ФИГ. 1 показан вид на НВ против полета. Показано место выносных видов А и Б, и вид на НВ сбоку В.
На ФИГ. 2 показан выносной вид А с частичным разрезом, при этом, рассекаемые детали для упрощения восприятия не заштрихованы. Показано место сечения Г-Г.
На ФИГ. 3 показано сечение Г-Г при нейтральном положении золотника 31.
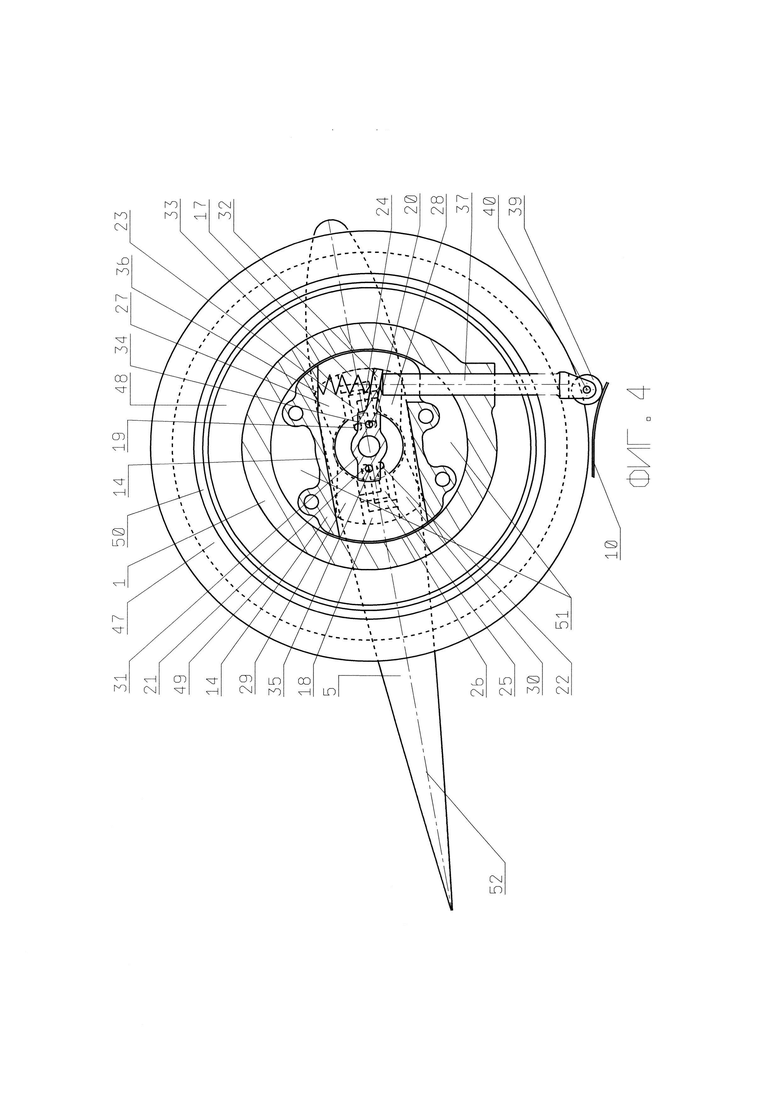
На ФИГ. 4 показано сечение Г-Г при отклонении золотника 31 вниз.
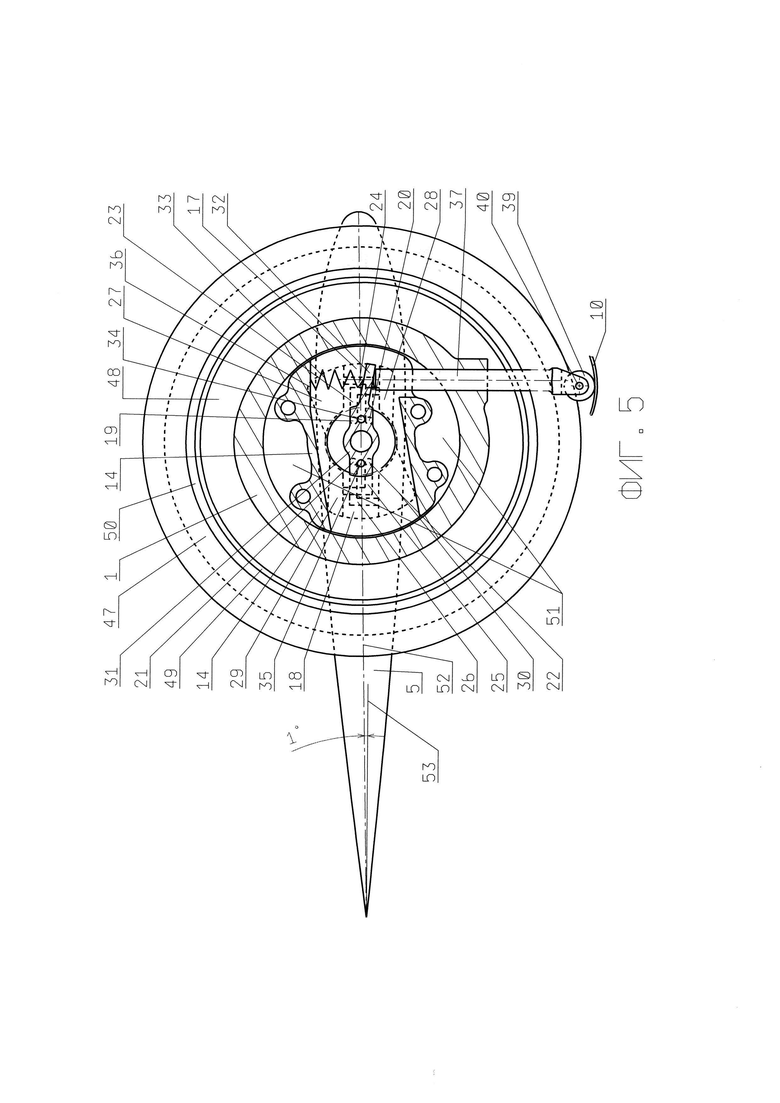
На ФИГ. 5 показано сечение Г-Г при отклонении лопасти НВ 5 вниз.
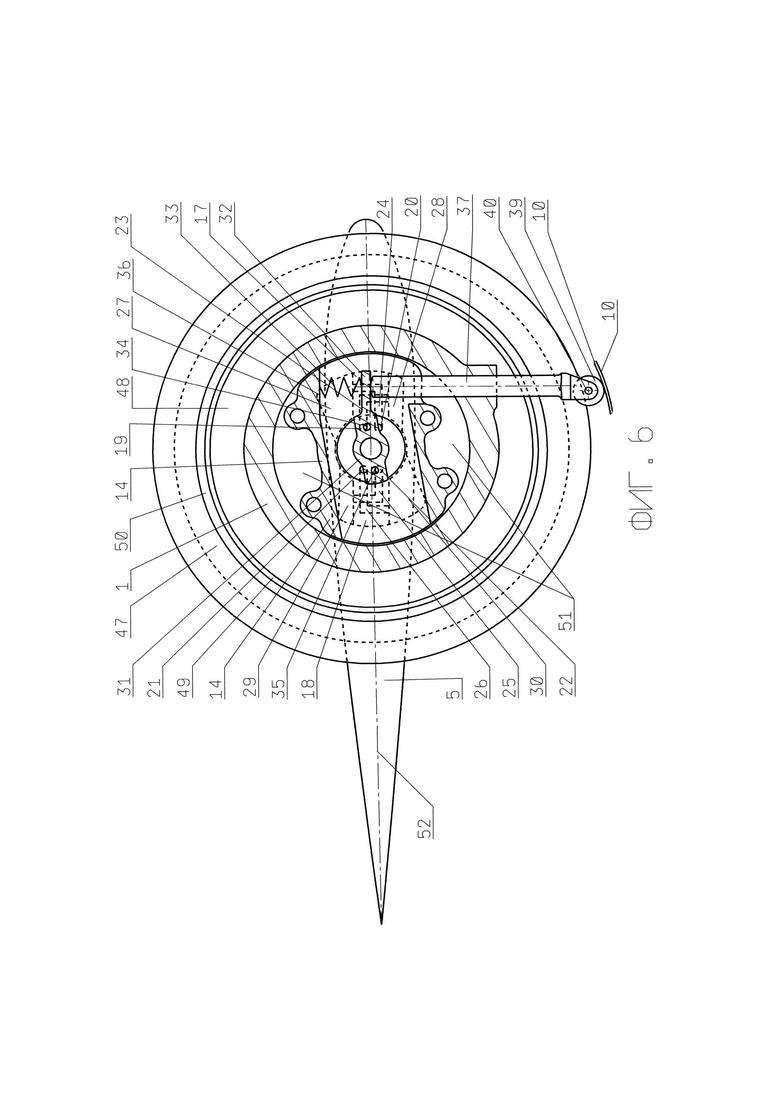
На ФИГ. 6 показано сечение Г-Г при отклонении золотника 31 вверх.
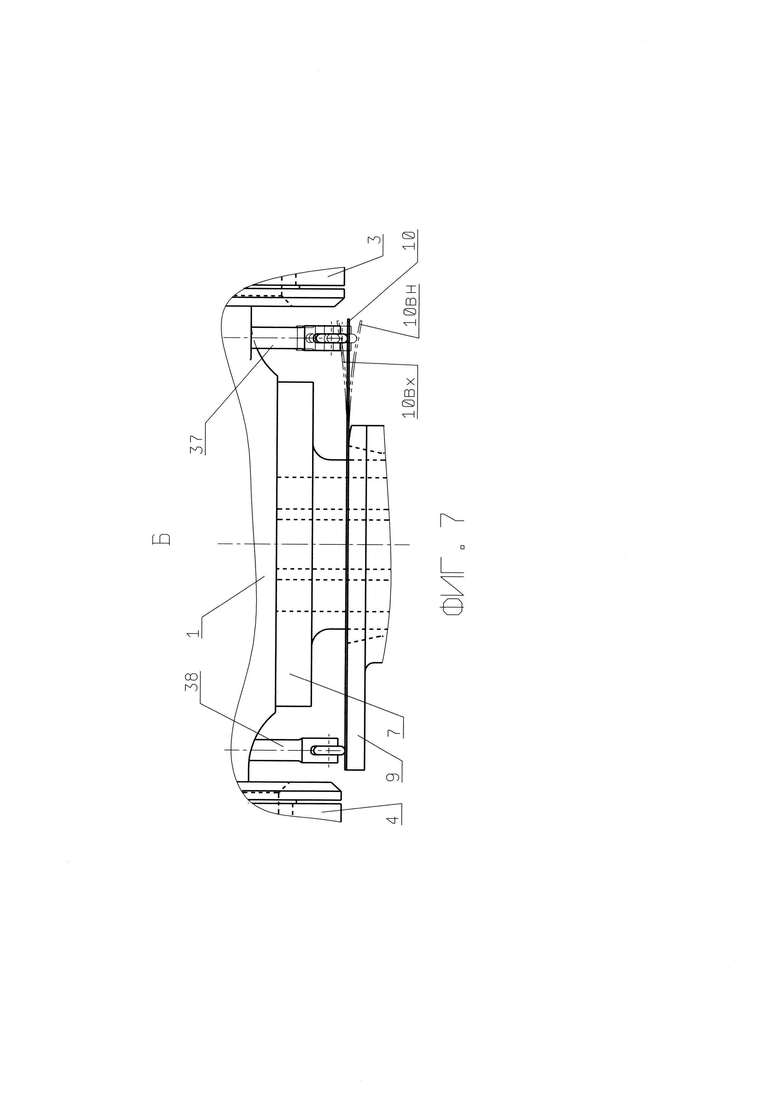
На ФИГ. 7 показан выносной вид Б.
На ФИГ. 8 показан вид В.
На ФИГ. 3÷6 шайба управления 10 показана фрагментарно в виде развертки вдоль траектории движения ролика толкателя 39.
Осуществление изобретения
В одном из возможных вариантов своего исполнения, в варианте НВ одновинтового вертолета (вертолета одновинтовой схемы), заявляемое изобретение представляет собой следующее. НВ выполнен двухлопастным, правого вращения (при виде на НВ сверху), втулка которого имеет только осевые шарниры, а лопасти выполнены «жесткими», например, как у известного вертолета Во-105 компании 
 (Германия).
(Германия).
Заявляемый НВ (ФИГ. 1÷8) имеет, корпус втулки ИВ 1, состоящий (условно) из, выполненных как единое целое, центральной части корпуса втулки НВ и двух рукавов корпуса втулки НВ. Сверху к центральной части корпуса втулки НВ 1 прикреплена (любым приемлемым образом, например, посредством болтового соединения) верхняя крышка корпуса втулки НВ 2, а снизу к центральной части корпуса втулки НВ 1 прикреплен (любым приемлемым образом, например посредством болтового фланцевого соединения) вал НВ 7. Внутри центральной части корпуса втулки НВ 1 неподвижно (относительно корпуса втулки НВ 1) закреплен (любым приемлемым способом, например посредством болтового соединения) гидроблок 12, включающий в себя: два гидронасоса шестеренчатого типа (на ФИГ. 1÷8 не показаны), приводимые в действие от главного редуктора (на ФИГ. 1÷8 не показаны) вертолета посредством вала привода гидронасосов 11, расположенного, внутри вала НВ 7; фильтры (на ФИГ. 1÷8 не показаны), служащие для очистки (фильтрации) рабочей жидкости; обратные и предохранительные клапаны (на ФИГ. 1÷8 не показаны); гидроаккумулятор (на ФИГ. 1÷8 не показан). В корпусе гидроблока 12 расположены гидромагистрали (на ФИГ. 1÷8 не показаны). Гидроблок 12 не имеет возможности, ни перемещаться в направлении продольной оси рукавов втулки НВ (в направлении осей осевых шарниров втулки НВ), ни вращаться вокруг данной оси. Емкостью 51 с рабочей жидкостью является внутренняя полость корпуса втулки НВ 1, состоящая из двух сообщающихся между собой половин, расположенных слева и справа от центральной части втулки НВ.
Втулка НВ у заявляемого изобретения имеет только осевые шарниры. Осевой шарнир лопасти НВ 5 имеет: корпус осевого шарнира втулки НВ 3, установленный в охват рукава корпуса втулки НВ 1 (который является осью осевого шарнира лопасти НВ 5); два радиальных игольчатых подшипника 41 и 42; один упорный подшипник с повернутыми роликами 43: переднее кольцо 44; заднее кольцо 45; гайки 46 и 47; уплотнение 48; упорное кольцо 49; стопорное кольцо 50. В осевом направлении (в направлении продольной оси рукава корпуса втулки НВ 1) корпус осевого шарнира втулки НВ 3 зафиксирован гайками 46 и 47. Таким образом, осевой шарнир лопасти НВ 5 (и лопасти НВ 6) в заявляемом изобретении по своей конструкции подобен осевым шарнирам трехшарнирных втулок НВ известных вертолетов, например, как у известного отечественного вертолета Ми-8.
К корпусу осевого шарнира втулки НВ 3 жестко (например, при помощи болтов соединением типа ухо-вилка - как у вышеуказанного вертолета Во-105) прикреплены две лопасти НВ 5 и 6, которые выполнены «жесткими» (подобны лопастям НВ вышеуказанного вертолета Во-105).
В полете (при вращении НВ) у заявляемого НВ центробежная нагрузка от лопасти НВ 5 передается на корпус осевого шарнира втулки НВ 3, и далее через гайку 47, через внешнюю обойму подшипника 42, через переднее кольцо 44, через подшипник 43, через заднее кольцо 45, через внутреннюю обойму подшипника 41, через гайку 46, далее на рукав корпуса втулки НВ 1, и далее на центральную часть корпуса втулки НВ 1, где она уравновешивается такой же по величине центробежной силой второй лопасти НВ 6.
Осевой шарнир лопасти НВ 6 устроен точно так же, как и осевой шарнир у вышеуказанной лопасти НВ 5.
Лопасть НВ 5 имеет свой индивидуальный привод управления углом установки, выполненный в виде лопастного неполноповоротного гидродвигателя (на ФИГ. 1÷8 показан только привод лопасти НВ 5 - привод второй противолежащей лопасти НВ 6 имеет аналогичную конструкцию). Лопастной неполноповоротный гидродвигатель расположен внутри рукава корпуса втулки НВ 1 (внутри оси осевого шарнира лопасти НВ 5), и состоит из: центрального корпуса 13; передней 14 и задней 15 боковых крышек; вала 16; лопастей 17 и 18. При этом, лопасти 17 и 18 жестко закреплены на едином валу 16 и расположены в корпусе 13 диаметрально друг относительно друга (лопасти 17 и 18 и вал 16 представляют собой единую деталь - как один из возможных вариантов исполнения). В передней части передней боковой крышке 14 имеет паз для золотника 31 и упор 53 для пружины 33.
Центральный корпус неполноповоротного гидродвигателя 13 неподвижно прикреплен к гидроблоку 12 (любым приемлемым способом, например, посредством болтового соединения), а, следовательно, центральный корпус лопастного неполноповоротного гидродвигателя 13 выполнен неподвижным относительно центральной части корпуса втулки НВ 1. То есть, центральный корпус 13 не имеет возможности, ни перемещаться в направлении продольной оси рукавов втулки НВ (в направлении осей осевых шарниров втулки НВ), ни вращаться вокруг данной оси. Вал 16 неполноповоротного гидродвигателя прикреплен (любым приемлемым образом, например, посредством шлицевого соединения) к корпусу осевого шарнира 3, а, следовательно, вал 16 жестко связан с комлевой частью лопасти НВ 5 (чтобы передавать крутящий момент от лопастей 17 и 18 неполноповоротного гидродвигателя на лопасть НВ 5). Вал 16 выполнен с возможностью совершать возвратно-вращательные перемещения (на определенный угол, равный диапазону углов установки лопасти НВ 5) относительно своей продольной оси (оси вращения осевого шарнира втулки НВ - оси рукава корпуса втулки НВ).
Таким образом, каждый лопастной неполноповоротный гидродвигатель (для привода обоих лопастей НВ 5 и 6) выполнен двухлопастным. Лопасть 17 помещена в свой рабочий цилиндр с двумя рабочими камерами 27 и 28, каждая из которых выполнена с возможностью питания от первого гидронасоса. Лопасть 18 помещена в свой рабочий цилиндр с двумя рабочими камерами 29 и 30, каждая из которых выполнена с возможностью питания от второго гидронасоса.
В теле лопасти 17 имеется, канал 23, соединяющий входное (и выходное) окно 19 в торце вала 16 с рабочей камерой 28, и канал 24, соединяющий входное (и выходное) окно 20 в торце вала 16 с рабочей камерой 27. В теле лопасти 18 имеется, канал 25, соединяющий входное (и выходное) окно 22 в торце вала 16 с рабочей камерой 29, и канал 26, соединяющий входное (и выходное) окно 21 в торце вала 16 с рабочей камерой 30.
Подачей рабочей жидкости в рабочие камеры 27, 28, 29 и 30 неполноповоротного гидродвигателя управляет плоский торцевой золотник 31. При этом, золотник 31 установлен на торцевой части вала 16 неполноповоротного гидродвигателя, и выполнен с возможностью совершать возвратно-вращательные перемещения относительно оси вращения вала 16. Золотник 31 расположен между торцевой частью вала 16 и корпусом гидроблока 12. Золотник 31 имеет, рычаг 32, взаимодействующий с пружиной 33, и впускные окна 34 и 35.
Золотник 31 взаимодействует с упором 36 передней боковой крышки 14 посредством пружины сжатия 33 (как один из возможных вариантов исполнения, однако пружин может быть и больше, например, две пружины расположенные соосно друг к другу). Золотник 31 взаимодействует с шайбой управления 10 посредством толкателя, состоящего из стержня 37, ролика 39, установленного на оси 40 (толкатель конструктивно подобен толкателям, используемых в вышеуказанных известных ТНВД). При этом, ось 40 смещена на некоторое расстояние относительно продольной оси стержня толкателя 37 - чтобы ролик 39 был самоориентирующимся.
Таким образом, вышеуказанная пружина 33 одним своим концом упираются в упор 36 передней боковой крышки 14, а другим своим концом воздействует на рычаг 32 золотника 31. Рычаг 32 золотника 31 воздействует на верхний конец (имеющий форму фрагмента сферической поверхности) стержня толкателя 37. Стержень толкателя 37 своим верхним концом проходит через отверстие в корпусе втулки НВ внутрь корпуса втулки НВ 1, и уплотняется любым приемлемым образом, например, так, как уплотняются штоки у известных гидроцилиндров приводов рулевых поверхностей самолетов и вертолетов. Стержень толкателя 37 посредством оси 40 воздействует на ролик 39. Ролик 39 воздействует на шайбу управления 10, которая неподвижно прикреплена (любым приемлемым образом, например, посредством болтового соединения) к поворотному корпусу 9. Поворотный корпус 9 прикреплен шарнирно, например, посредством кардана (или сферического шарнира) к ползуну 8. Ползун 8 выполнен с возможностью перемещения вдоль своей направляющей (на ФИГ. 1÷8 не показана), в направлении оси вращения вала НВ 7 вверх-вниз, но не имеет возможности поворачиваться в направлении вращения вала НВ 7. Поворотный корпус 9 (и шайба управления 10) не имеет возможности поворачиваться в направлении вращения вала НВ 7, а может лишь изменять свой угол установки относительно оси вращения вала НВ 7 только в продольной (в направлении вперед-назад) плоскости (как один из возможных вариантов исполнения), и перемещаться (без наклона) вместе с ползуном 8 в направлении вверх-вниз вдоль оси вращения вала НВ. Однако, возможен вариант исполнения, когда поворотный корпус 9 может изменять свой угол установки относительно оси вращения вала НВ 7 также и в поперечной (в направлении влево-вправо) плоскости. Поворотный корпус 9 с наступающей стороны НВ имеет срез, за который выступает свободный край шайбы управления 10.
Таким образом, пружина 33 посредством рычаг 32 золотника 31 прижимает толкатель к шайбе управления 10.
Привод лопасти НВ 6 устроен точно так же, как и привод вышеуказанной лопасти НВ 5.
Уплотнение емкости с рабочей жидкостью 51, которой является внутренняя полость осевого шарнира, может осуществляется любым приемлемым образом, например, как уплотняются осевые шарниры у известных втулок НВ.
Таким образом, в заявляемом изобретении используются две независимые гидросистемы (за исключением общей для них емкости с рабочей жидкостью), что повышает надежность работы системы управления углами установки лопастей НВ.
Заявляемое изобретение работает следующим образом.
Рассматривается работа лопасти НВ 5 (работа лопасти НВ 6 происходит аналогичным образом).
В равновесном положении, когда нет перемещений золотника 31 (ФИГ. 3) и лопасти 17 (а, следовательно, и лопасти НВ 5), впускное окно 34 золотника 31, подключенное (всегда) к выходу из первого гидронасоса, не сообщено с входными (и выходными) окнами 19 и 20, расположенными в торце вала 16 (впускное окно 34 находится на равном удалении от входных окон 19 и 20). Следовательно, рабочие камеры 27 и 28 изолированы от выхода из первого гидронасоса (то есть, в рабочих камерах 27 и 28 заперта рабочая жидкость), и поэтому лопасть НВ 5 неподвижна относительно корпуса втулки НВ 1 (относительно своего рукава корпуса втулки НВ). Впускное окно 35 золотника 31, подключенное (всегда) к выходу из второго гидронасоса, не сообщено с входными (и выходными) окнами 21 и 22, расположенными в торце вала 16 (впускное окно 35 находится на равном удалении от входных окон 21 и 22). Следовательно, рабочие камеры 29 и 30 изолированы от выхода из второго гидронасоса (то есть, в рабочих камерах 29 и 30 заперта рабочая жидкость), и поэтому лопасть НВ 5 неподвижна относительно корпуса втулки НВ 1 (относительно своего рукава корпуса втулки НВ).
При отклонении свободного края шайбы управления 10 на наступающей стороне НВ вниз в положение 10вн (ФИГ. 7) происходит следующее.
Когда ролик толкателя 39 попадает на нисходящий участок шайбы управления 10 (ФИГ. 4), золотник 31 под действием пружины 33 начинает поворачиваться вокруг своей оси, совпадающей с ось вращения вала 16. При этом происходит следующее. Впускное окно 34 золотника 31, подключенное (всегда) к выходу из первого гидронасоса, соединяется с входным окном 20 и с каналом 24 в лопасти 17, а, следовательно, рабочая камера 27 сообщается с выходом из первого гидронасоса. Входное окно 19 и канал 23 в лопасти 17, соединенный с рабочей камерой 28, соединяется с емкостью с рабочей жидкостью 51 (то есть, соединяется со сливом, так как емкость 51 не полностью заполнена рабочей жидкостью и давление в ней меньше (примерно равно атмосферному давлению), чем давление рабочей жидкости на выходе из первого гидронасоса). Впускное окно 35 золотника 31, подключенное (всегда) к выходу из второго гидронасоса, соединяется с входным окном 21 и с каналом 26 в лопасти 18, а, следовательно, рабочая камера 30 сообщается с выходом из второго гидронасоса. Входное окно 22 и канал 25 в лопасти 18, соединенный с рабочей камерой 29, соединяется с емкостью с рабочей жидкостью 51 (то есть, соединяется со сливом).
Таким образом, рабочая жидкость под избыточным давлением начинает поступать в рабочие камеры 27 и 30, а из рабочих камер 28 и 29 рабочая жидкость начинает сливаться в емкость для рабочей жидкости 51 (и далее вновь поступает на вход в первый и второй гидронасосы, и далее все повторяется). На лопасти 17 и 18 действует избыточное давление, создаваемое первым и вторым гидронасосами, а, следовательно, на лопастях 17 и 18 создается крутящий момент, поворачивающих их и вал 16 в направлении поворота золотника 31 (лопасти 17 и 18 следуют за золотником 31). А поворачивающийся вал 16 поворачивает за собой лопасть НВ 5 (так как вал 16 и лопасть НВ 5 жестко соединены между собой посредством шлицевого соединения). Лопасть НВ 5 поворачивается относительно корпуса втулки НВ 1 (относительно рукава корпуса втулки НВ), уменьшая свой угол установки.
Когда ролик толкателя 39 попадает на самый нижний участок шайбы управления 10 (ФИГ. 5), наступает новое равновесное положение, при котором, впускное окно 34 золотника 31, подключенное (всегда) к выходу из первого гидронасоса, не сообщено с входными (и выходными) окнами 19 и 20, расположенными в торце вала 16 (впускное окно 34 находится на равном удалении от входных окон 19 и 20). Следовательно, рабочие камеры 27 и 28 изолированы от выхода из первого гидронасоса (то есть, в рабочих камерах 27 и 28 заперта рабочая жидкость), и поэтому лопасть НВ 5 неподвижна относительно корпуса втулки НВ 1 (относительно своего рукава корпуса втулки НВ). Впускное окно 35 золотника 31, подключенное (всегда) к выходу из второго гидронасоса, не сообщено с входных (и выходными) окнами 21 и 22, расположенными в торце вала 16 (впускное окно 35 находится на равном удалении от входных окон 21 и 22). Следовательно, рабочие камеры 29 и 30 изолированы от выхода из второго гидронасоса (то есть, в рабочих камерах 29 и 30 заперта рабочая жидкость), и поэтому лопасть НВ 5 неподвижна относительно корпуса втулки НВ 1 (относительно своего рукава корпуса втулки НВ).
Когда ролик толкателя 39 попадает на восходящий участок шайбы управления 10 (ФИГ. 4), золотник 31 под действием стержня толкателя 37 начинает поворачиваться вокруг своей оси, совпадающей с ось вращения вала 16. При этом происходит следующее. Впускное окно 34 золотника 31, подключенное (всегда) к выходу из первого гидронасоса, соединяется с входным окном 19 и с каналом 23 в лопасти 17, а, следовательно, рабочая камера 28 сообщается с выходом из первого гидронасоса. Входное окно 20 и канал 24 в лопасти 17, соединенный с рабочей камерой 27, соединяется с емкостью с рабочей жидкостью 51 (то есть, соединяется со сливом). Впускное окно 35 золотника 31, подключенное (всегда) к выходу из второго гидронасоса, соединяется с входным окном 22 и с каналом 25 в лопасти 18, а, следовательно, рабочая камера 29 сообщается с выходом из второго гидронасоса. Входное окно 21 и канал 26 в лопасти 18, соединенный с рабочей камерой 30, соединяется с емкостью с рабочей жидкостью 51 (то есть, соединяется со сливом).
Таким образом рабочая жидкость под избыточным давлением начинает поступать в рабочие камеры 28 и 29, а из рабочих камер 27 и 30 рабочая жидкость начинает сливаться в емкость для рабочей жидкости 51 (и далее вновь поступает на вход в первый и второй гидронасосы, и далее все повторяется). На лопасти 17 и 18 действует избыточное давление, создаваемое первым и вторым гидронасосами, а, следовательно, на лопастях 17 и 18 создается крутящий момент, поворачивающих их и вал 16 в направлении поворота золотника 31 (лопасти 17 и 18 следуют за золотником 31). А поворачивающийся вал 16 поворачивает за собой лопасть НВ 5. Лопасть НВ 5 поворачивается относительно корпуса втулки НВ 1 (относительно рукава корпуса втулки НВ), увеличивая свой угол установки.
Когда ролик толкателя 39 попадает на самый высокий участок шайбы управления 10, наступает новое равновесное положение, показанное на ФИГ. 3 и описанное выше.
Таким образом, в заявляемом изобретении на втулку НВ подается только механическая энергия для привода гидронасосов (посредством вала 11, приводимого в действие от главного редуктора (или от иного источника, например, от отдельного двигателя любого типа)), а все остальное оборудование, необходимое для работы неполноповоротных гидродвигателей, расположено на втулке НВ.
Как указано выше в [9], лопастные неполноповоротные гидродвигатели (квадранты) имеют быстродействие (максимальную скорость поворота выходного вала лопасти квадранта), равное - 200÷240 °/сек.
Такого быстродействия более чем достаточно, для того, чтобы индивидуально управлять углом установки каждой лопасти НВ в заявляемом изобретении.
В заявляемом изобретение на шайбу управления 10 со стороны толкателя действует только усилие пружины 33, сила тяжести от массы толкателя и силы инерции от массы золотника 31 и толкателя, величина которых в тысячи раз меньше, чем усилие, действующие на вращающееся и не вращающееся кольца у механических АП со стороны тяги управления лопастями НВ у известных вертолетов. Следовательно, шайба управления 10 в заявляемом изобретении может быть выполнена (или вся или только ее часть) гибкой (из любого приемлемого материала, например, из тонкого листа стали). Это позволит произвольным образом управлять углом установки каждой лопасти НВ 5 и 6. Поверхность шайбы управления 10, вдоль траектории движения по ней ролика толкателя 39, в заявляемом изобретении может иметь любую приемлемую форму (плоскую, волнистую (на подобие стиральной доски), и другое).
Возможен вариант исполнения заявляемого изобретения, отличающийся от показанного на ФИГ. 1÷8 тем, что у него шайба управления 10 (вдоль траектории движения по ней ролика толкателя 39) имеет волнистую форму (на подобие стиральной доски). В этом случае за один оборот лопасти НВ вокруг оси вращения вала НВ, она будет несколько раз изменять свой угол установки (а не один раз, как у известных вертолетов), что снизить величину вибраций, генерируемых лопастью НВ.
Управление вертолетом, при использовании на нем заявляемого изобретения, по тангажу может осуществляться наклоном поворотного корпуса 9 (и шайбы управления 10) в продольной плоскости в направлении вперед-назад (ФИГ. 8), а по крену - изгибом (вверх или вниз) шайбы управления 10 (ФИГ. 7) в левой (наступающей) четверти ее диска (с учетом угла опережения управления лопастями НВ). В таком случае лопасти НВ 5 и 6 в секторах передней, правой (отступающей) и задней четвертей диска НВ будут установлены на максимально возможные углы установки (большие, чем у известных вертолетов с известными механическими АП, но меньшие критических углов атаки - чтобы не было срыва по тока с отступающих лопастей НВ). Это позволит создавать заявляемому НВ в горизонтальном полете большую силу тяги, чем у известных одновинтовых вертолетов. Одновременно, при этом не будет иметь место срыв потока на отступающих лопастях НВ.
У заявляемого изобретения при максимальной скорости полета вертолета основную часть подъемной силы НВ будут создавать сектора передней и задней четвертей диска НВ. В секторе правой (отступающей) четверти диска НВ лопасти НВ будут установлены на максимально возможные углы атаки, которые, однако, меньше критических (с необходимым запасом). В секторе левой (наступающей) четверти диска НВ лопасти НВ будут установлены на такие углы атаки, чтобы только сбалансировать лопасти НВ, находящиеся в секторе правой (отступающей) четверти диска НВ (чтобы не было несбалансированного момента по крену). Это обеспечивается за счет того, что у шайбы управления 10 сектор левой (наступающей) четверти диска выполнен гибким.
Возможен вариант исполнения заявляемого изобретения, когда у него золотники, управляющие подачей рабочей жидкости в рабочие камеры неполноповоротных гидродвигателей, управляются не посредством шайбы управления 10 (как показано на ФИГ. 1÷8), то есть, не механически, а любым иным приемлемым образом, например, посредством воздействия на золотники электромагнитов (в зависимости от азимутального положения лопасти НВ), как это реализовано в электродистанционной системе управления самолетом или вертолетом. При этом, электрический сигнал к электромагниту поступает от задающего устройства, например, расположенного неподвижно (относительно вращающейся втулки НВ) на фюзеляже вертолета. В задающее устройство поступают сигналы от датчиков обратной связи азимутального положения лопастей НВ и угла установки лопастей НВ (угла атаки лопастей НВ). В задающем устройстве каждому азимутальному положению лопасти НВ соответствует конкретное положение угла установки лопасти НВ (в зависимости от режима полета вертолета). При этом, электрические сигналы от задающего устройства к электромагнитам (и от датчиков обратной связи к задающему устройству) могут передаваться, например, через вращающийся токосъемник (например, как у известных электрических двигателей).
В заявляемом изобретении в качестве распределителя рабочей жидкости в рабочие камеры неполноповоротных гидродвигателей может быть использован любой его тип: золотник любого типа (плоский торцевой (как показано на ФИГ. 1÷8); цилиндрический; и другое.); клапан; и другое.
В заявляемом изобретении лопастной неполноповоротный гидродвигатель (квадрант) может иметь любое приемлемое количество лопастей (и соответствующее им количество рабочих камер): одну; две (как рассмотрено выше и показано на ФИГ. 1÷8); более двух.
Заявляемое изобретение может иметь любое приемлемое количество гидронасосов; один; два (как рассмотрено выше); более двух.
Заявляемое изобретение может иметь любое приемлемое количество фильтров для очистки рабочей жидкости; один; два; более двух.
Заявляемое изобретение может иметь любое приемлемое количество лопастей НВ: одну (например, с противовесом, как у известных вертолетов с однолопастным несущим винтом); две (как рассмотрено выше); более двух.
Заявляемое изобретение может иметь втулку НВ как только с осевым шарниром (как показано на ФИГ 1÷8 и описано выше), так и трехшарнирную втулку НВ. При этом, в последнем случае расположение шарниров должно быть таким (начиная от оси вращения НВ): осевой - горизонтальный - вертикальный.
Заявляемое изобретение может использоваться на НВ: вертолетов всех схем (одновинтовых (как рассмотрено выше и показано на ФИГ. 1÷8); соосных; синхроптерах (с перекрещивающимися несущими винтами); поперечной схемы; продольной схемы; многовинтовых и другое); автожиров; винтокрылов; и другое.
Заявляемое изобретение может быть использовано на: воздушных винтах самолетов; судовых гребных винтах; винтах ветродвигателей; и другое.
У заявляемого изобретения гидроблок (в котором размещены гидронасосы, фильтры, обратные клапаны и другая необходимая аппаратура) может крепиться к корпусу втулки НВ любым приемлемым образом: болтовым соединением; путем запрессовки гидроблока в корпус втулки НВ и дополнительного болтового крепления к корпусу втулки НВ; и другое.
Возможен вариант исполнения заявляемого изобретения, отличающийся от показанного на ФИГ. 1÷8 тем, что у него вышеуказанные золотники, управляющие подачей рабочей жидкости в рабочие камеры неполноповоротных гидродвигателей, также (как в показанном на ФИГ. 1÷8 варианте) расположены на втулке НВ. А все остальное вышеуказанное гидрооборудование (два гидронасоса, фильтры, обратные и предохранительные клапаны, гидроаккумулятор, емкость для рабочей жидкости, и др.) расположены вне втулки НВ - на не вращающейся части вертолета. В этом варианте исполнения заявляемого изобретения внутри вала НВ имеются два трубопровода (или сам вал НВ является одним из трубопроводов), расположенных по схеме труба в трубе. При этом, один трубопровод служит для подачи рабочей жидкости под избыточным давлением от вышеуказанных гидронасосов к вышеуказанным золотникам, и далее в рабочие камеры вышеуказанных неполноповоротных гидродвигателей, а второй трубопровод служит для обратного слива отработавшей (в рабочих камерах неполноповоротных гидродвигателей) рабочей жидкости в емкость с рабочей жидкостью.
Возможен вариант исполнения заявляемого изобретения, отличающийся от показанного на ФИГ. 1÷8 тем, что у него шайба управления 10, с которой контактируют ролики толкателей, выполнена плоской и жесткой.
Возможен вариант исполнения заявляемого изобретения, когда у него лопастной неполноповоротный гидродвигатель выполнен катушечного типа. Его передняя крышка 14 (ближе расположенная к оси вала НВ 7) жестко прикреплена к лопастям 17 и 18 (и выполнена с возможностью вращения вместе с лопастями 17 и 18), а вал 16 жестко прикреплен (в осевом отношении) к корпусу осевого шарнира 3. Задняя крышка 15 (дальше расположенная от оси вала НВ 7) жестко прикреплена к центральному корпусу 13. В этом варианте давление рабочей жидкости в рабочих камерах, действующее на внутреннюю стенку передней крышки 14, будет частично (или полностью) разгружать центробежную силу от лопасти НВ 5. Это позволит увеличить ресурс (срок службы) упорного подшипника 43. Точно также разгружается центробежная сила от лопасти НВ 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2020 |
|
RU2740718C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2015 |
|
RU2600966C1 |
| КОМАНДНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2751721C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ И ОБЪЕМНАЯ МАШИНА, ИСПОЛЬЗУЮЩАЯ ТАКОЙ МЕХАНИЗМ | 2010 |
|
RU2494260C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2489576C2 |
| ГАЗОЖИДКОСТНАЯ МАШИНА | 1995 |
|
RU2096655C1 |
| НАСОС | 1995 |
|
RU2094663C1 |
| ТЕПЛОВОЙ ДВИГАТЕЛЬ | 1995 |
|
RU2093695C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2639352C1 |
| КОЛОВРАТНАЯ МАШИНА | 1994 |
|
RU2062884C1 |

Изобретение относится к области авиации, в частности к конструкциям несущих винтов вертолетов. Несущий винт вертолета имеет втулку несущего винта и лопасти несущего винта. Втулка несущего винта имеет корпус и осевые шарниры, свой для каждой лопасти несущего винта. Каждая лопасть несущего винта выполнены с возможностью индивидуального управления углом ее установки посредством своего лопастного неполноповоротного гидродвигателя. Каждый из неполноповоротных гидродвигателей установлен на втулке несущего винта, встроен в осевой шарнир своей лопасти несущего винта и выполнен с возможностью взаимодействия с вышеуказанным корпусом втулки несущего винта и со своей лопастью несущего винта. На втулке несущего винта также расположены емкость с рабочей жидкостью, золотники, гидронасос, фильтр, выполненные для обеспечения работы вышеуказанных неполноповоротных гидродвигателей. 5 з.п. ф-лы, 8 ил.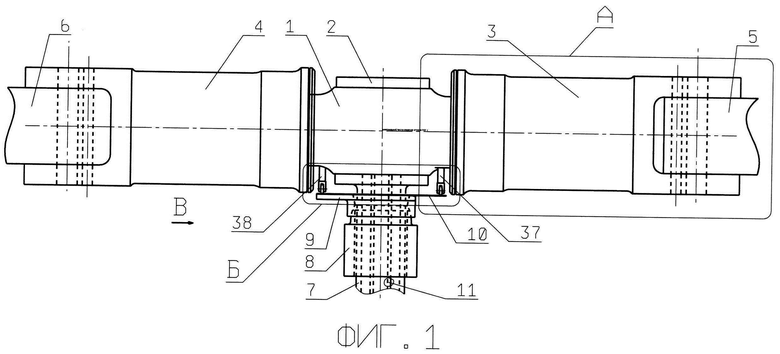
1. Винт, например несущий винт вертолета, имеет одну или более лопастей несущего винта, выполненных с возможностью управления углом их установки, втулку несущего винта, втулка несущего винта имеет корпус, отличающийся тем, что управление углами установки вышеуказанных лопастей несущего винта выполнено посредством лопастных неполноповоротных гидродвигателей, своего для каждой из вышеуказанных лопастей несущего винта, установленных на вышеуказанной втулке несущего винта, каждый из вышеуказанных лопастных неполноповоротных гидродвигателей выполнен с возможностью взаимодействия с вышеуказанными корпусом втулки несущего винта и со своей лопастью несущего винта.
2. Винт по п. 1, отличающийся тем, что вышеуказанная втулка несущего винта имеет осевые шарниры, свой для каждой из вышеуказанных лопастей несущего винта, каждый из вышеуказанных лопастных неполноповоротных гидродвигателей встроен в свой вышеуказанный осевой шарнир втулки несущего винта.
3. Винт по п. 1 или 2, отличающийся тем, что каждый из вышеуказанных лопастных неполноповоротных гидродвигателей имеет корпус, по меньшей мере, одну лопасть, корпус лопастного неполноповоротного гидродвигателя выполнен с возможностью взаимодействия с вышеуказанным корпусом втулки несущего винта, а вышеуказанная лопасть неполноповоротного гидродвигателя выполнена с возможностью взаимодействия со своей вышеуказанной лопастью несущего винта.
4. Винт по п. 3, отличающийся тем, что на вышеуказанной втулке несущего винта расположены емкость с рабочей жидкостью, выполненная с возможностью питания вышеуказанных неполноповоротных гидродвигателей, золотники, свой для каждого из вышеуказанных неполноповоротных гидродвигателей, выполненные с возможностью управления подачей вышеуказанной рабочей жидкости в рабочие камеры вышеуказанных лопастных неполноповоротных гидродвигателей, по меньшей мере, один гидронасос, выполненный с возможностью подачи вышеуказанной рабочей жидкости в рабочие камеры вышеуказанных лопастных неполноповоротных гидродвигателей, по меньшей мере, один фильтр, выполненный с возможностью очистки вышеуказанной рабочей жидкости.
5. Винт по п. 4, отличающийся тем, что имеется шайба, выполненная с возможностью взаимодействия и управления вышеуказанными золотниками и выполненная с возможностью изменения угла ее установки по отношению к оси вращения несущего винта, вышеуказанная шайба выполнена не вращающейся совместно со втулкой несущего винта.
6. Винт по п. 5, отличающийся тем, что или вся вышеуказанная шайба или только ее часть выполнена гибкой.
| ДВИЖИТЕЛЬ | 2005 |
|
RU2305648C2 |
| JP 9011994 A, 14.01.1997 | |||
| US 20140034778 A1, 06.02.2014 | |||
| US 20160340034 A1, 24.11.2016 | |||
| Измеритель модуляционных характеристик | 1984 |
|
SU1262403A1 |

