Область техники, к которой относится изобретение
Изобретение имеет отношение к авиации и касается в частности командных постов ручного управления летательного аппарата (ЛА).
Уровень техники
У известных пилотируемых вертолетов в качестве командного поста ручного управления по тангажу и крену используется рычаг циклического шага несущего винта (НВ), отклонение которого приводит к наклону невращающегося (и вращающегося) кольца автомата перекоса (АП) в соответствующую сторону, что приводит к циклическому изменению углов установки лопастей НВ. Управление вертолетом по тангажу осуществляется перемещением рычага циклического шага в направлении вперед-назад, а управление вертолетом по крену осуществляется перемещением рычага циклического шага в направлении влево-вправо.
Управление вертолетом по курсу осуществляется перемещением педалей ножного управления в направлении вперед-назад.
Управление общим шагом НВ и двигателем (или двигателями) на вертолете осуществляется рычагом общего шага (рычагом шаг-газ) с системой фиксации в любом положении, который располагается слева от сидения пилота, и который перемещается левой рукой пилота в направлении вверх-вниз (Далин В.Н, Михеев С.В. Конструкция вертолетов. М: МАИ, 2001, с. 157, 159, Рис. 3.11.2, [1]). Изменение общего шага НВ связано с управлением мощностью двигателя вертолета, или посредством механической кинематической связи, или автоматически через стабилизатор частоты вращения НВ. В обоих случаях обеспечивается поддержание заданной частоты вращения НВ при изменении общего шага НВ, то есть, одновременно с изменением общего шага НВ соответственно изменяется мощность двигателя. В случае механической связи рычаг общего шага НВ имеет специальную рукоятку коррекции, которая выполнена с возможностью вращения вокруг своей продольной оси, связанную с дросселем (рычагом подачи топлива) двигателя. При помощи этой поворотной рукоятки летчик может корректировать частоту вращения НВ в допустимых пределах независимо от общего шага НВ.
Таким образом, управление вертолетом осуществляется тремя различными органами управления (рычагом циклического шага НВ, педалями ножного управления и рычагом общего шага НВ), что затрудняет пилотирование вертолета, особенно при парировании внезапных отказов, так как требует четкой координации движения обеих ног и обеих рук пилота. Это также требует большего времени для обучения пилотов.
У большинства известных пилотируемых неманевренных самолетов в качестве командного поста ручного управления по тангажу и крену используется командный пост штурвального управления.
Командный пост штурвального управления состоит из колонки штурвала и штурвала. Колонка штурвала располагается, или между ногами пилота, или выходит в кабину экипажа через приборную доску, например, как у известного отечественного пассажирского самолета Ил-62 (Житомирский Г.И. Конструкция самолетов. М.: Машиностроение, 1991, с. 315-316, Рис. 8.6 г, [2]).
Колонка штурвала своим нижним концом шарнирно прикреплена к неподвижной части конструкции самолета (к полу кабины экипажа), и выполнена с возможностью поворота (на определенный угол) относительно оси вышеуказанного шарнира в продольной плоскости в направлении вперед-назад. Штурвал, представляющий собой конструкцию с двумя ручками (одна ручка для взаимодействия с левой рукой пилота, а вторая ручка для взаимодействия с правой рукой пилота), прикреплен шарнирно (ось шарнира лежит в продольной плоскости) к верхнему концу колонки штурвала. Поворотом колонки штурвала относительно оси вышеуказанного шарнира в продольной плоскости в направлении вперед-назад осуществляется управление самолетом по тангажу. При этом, при повороте колонки штурвала вокруг ее оси вращения в продольной плоскости в направлении вперед-назад, штурвал также перемещается в продольной плоскости в направлении вперед-назад («от себя»-«на себя»). Поворотом (на определенный угол) штурвала вокруг вышеуказанной оси его шарнира (вокруг продольной оси штурвала) в направлении влево-вправо осуществляется управление самолетом по крену. Таким образом, перемещением штурвала в направлении вперед-назад («от себя» - «на себя») осуществляется управление самолетом по тангажу, а поворотом штурвала вокруг его продольной оси в направлении влево-вправо осуществляется управление самолетом по крену.
Управление самолетом по курсу осуществляется перемещением левой и правой педалей ножного управления в направлении вперед-назад.
Управление двигателем (или двигателями) самолета осуществляется отдельным рычагом.
Таким образом, управление самолетом (также, как и вышеуказанное управление вертолетом) осуществляется тремя различными органами управления (штурвалом, педалями ножного управление и рычагом управления двигателем), что затрудняет пилотирование самолета, особенно при парировании внезапных отказов, так как требует четкой координации движения обеих ног и обеих рук. Это также требует большего времени для обучения пилотов.
Штурвальное управление не требует большого пространства между ногами пилота, по сравнению с рычагом управления, используемым для управления по тангажу и крену на вертолетах и маневренных самолетах. Все это позволяет при штурвальном управлении уменьшить расстояние между педалями ножного управления и упростить компоновку кабины экипажа.
Вышеуказанные системы управления вертолетом и самолетом могут имеет как механическую систему управления (посредством тяг и качалок), так и электродистанционную систему управления, которая имеет целый ряд преимуществ перед механической системой управления.
Командные посты ручного управления в составе колонки штурвала и штурвала обладают ограниченными функциональными возможностями, так как с их помощью можно управлять ЛА только в двух плоскостях - в продольной плоскости (по тангажу) и в поперечной плоскости (по крену).
Из (Патент Российской Федерации №2579250, В64С 13/04, опубл. 10.04.2016, [3]) известен трехкоординатный пост ручного управления самолетом. Он представляет собой известный командный пост ручного штурвального управления, в конструкцию которого добавлена еще одна степень свободы, а, именно, штурвал выполнен с возможностью поворота относительно своей вертикальной оси. В этом случае левая и правая ручки штурвала выполнены с возможностью вращения вокруг вышеуказанной вертикальной оси в направлении вперед-назад, за счет чего осуществляется управление самолетом по курсу.
Из (Авторское Свидетельство СССР №997019, G05G 1/08, В62К 23/06, опубл. 15.02.83, [4]) известна вращающаяся рукоятка дросселя карбюратора транспортного средства, например, мотоцикла. Она представляет собой закрепленную на руле управления мотоциклом вращающуюся рукоятку (за которую своей правой рукой держится водитель мотоцикла), связанную с дросселем карбюратора двигателя мотоцикла. За счет вращения вышеуказанной рукоятки вокруг ее продольной оси осуществляется регулирование мощности двигателя мотоцикла. Такое совместное управление движением мотоцикла (посредством поворота руля мотоцикла влево-вправо) и мощностью двигателя мотоцикла (посредством поворота вышеуказанной рукоятки вокруг ее продольной оси) очень удобно, и используется на всех известных мотоциклах.
Наиболее близким к заявляемому изобретению является любой командный пост ручного управления ЛА, состоящий из колонки штурвала и штурвала.
Раскрытие изобретения
Задачей заявляемого изобретения является облегчение пилотирования вертолета, уменьшение времени, необходимого для обучения пилотов. При этом, управление вертолетом должно быть удобным и естественным.
Очевидно, если такая задача может быть решена, то это «неочевидное» решение для специалиста, сведущего в соответствующей области техники, поскольку у известных вертолетов она не решена.
Заявляемое изобретение, в одном из возможных вариантов его исполнения, имеет следующие общие с прототипом существенные признаки: командный пост ручного управление летательного аппарата, имеет, штурвал, выполненный, с возможностью перемещения в продольной плоскости в направлении вперед-назад, и с возможностью вращения вокруг своей продольной оси в направлении влево-вправо, штурвал выполнен с возможностью управления летательным аппаратом по тангажу за счет вышеуказанного перемещения штурвала в направлении вперед-назад, штурвал выполнен с возможностью управления летательным аппаратом по крену за счет вышеуказанного вращения штурвала в направлении влево-вправо, штурвал, имеет две ручки, левую и правую, выполненные с возможностью взаимодействия с левой и правой руками пилота, соответственно.
Отличительными от прототипа существенными признаками является: вышеуказанный командный пост ручного управления использован для управления вертолетом с одним несущим винтом, по меньшей мере, одна из вышеуказанных ручек штурвала, например, правая, выполнена с возможностью вращения вокруг своей продольной оси, вышеуказанная правая поворотная ручка штурвала выполнена с возможностью управления общим шагом несущего винта и мощностью двигателя или двигателей вертолета.
В заявляемом изобретении, за счет перемещения штурвала в направлении вперед-назад происходит управление циклическим шагом НВ в продольной плоскости (происходит управление вертолетом по тангажу), за счет вращения штурвала в направлении влево-вправо происходит управление циклическим шагом НВ в поперечной плоскости (происходит управление вертолетом по крену), а за счет вращения правой поворотной ручки штурвала происходит управление общим шагом НВ и мощностью двигателя (или двигателей).
Таким образом, в заявляемом изобретении при помощи одного органа (штурвала) осуществляется управление циклическим и общим шагом НВ и мощностью двигателя (или двигателей) вертолета. При этом, все движения штурвала и правой поворотной ручки штурвала удобны и естественны, что будет способствовать облегчению пилотирования вертолета, так как обе руки пилота расположены на одном органе управления (на штурвале) и повышению безопасности полета вертолета. Это также потребует меньше времени для обучения пилотов.
Краткое описание чертежей
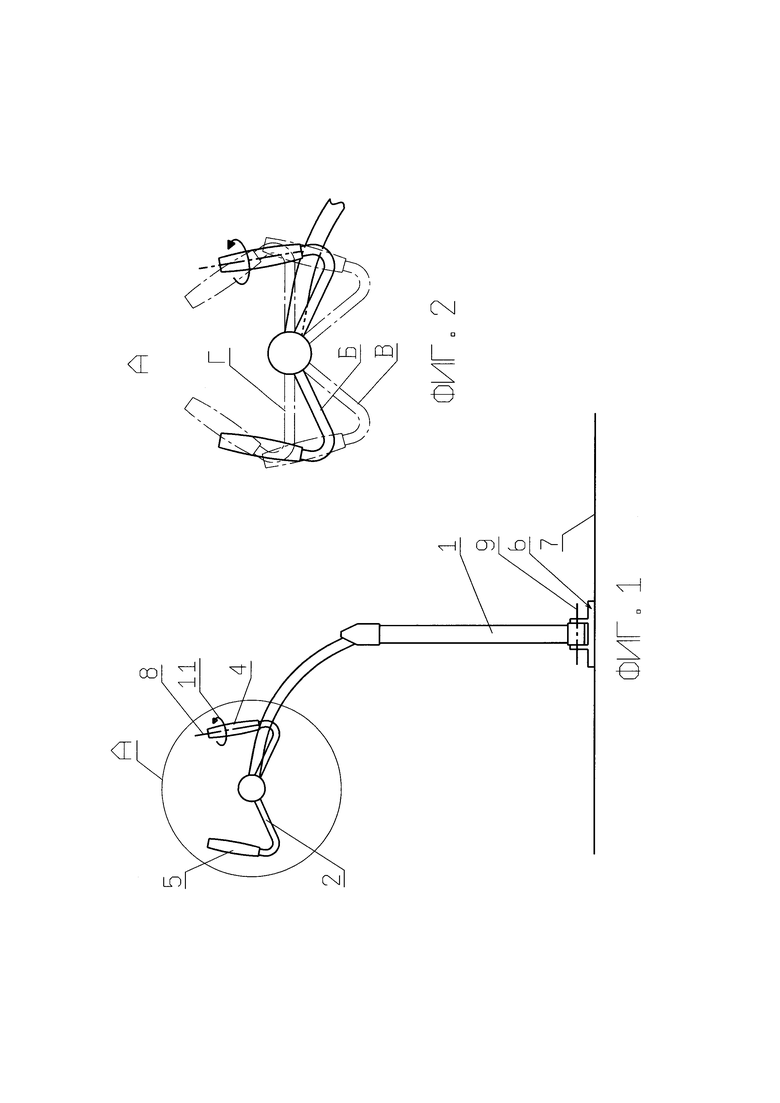
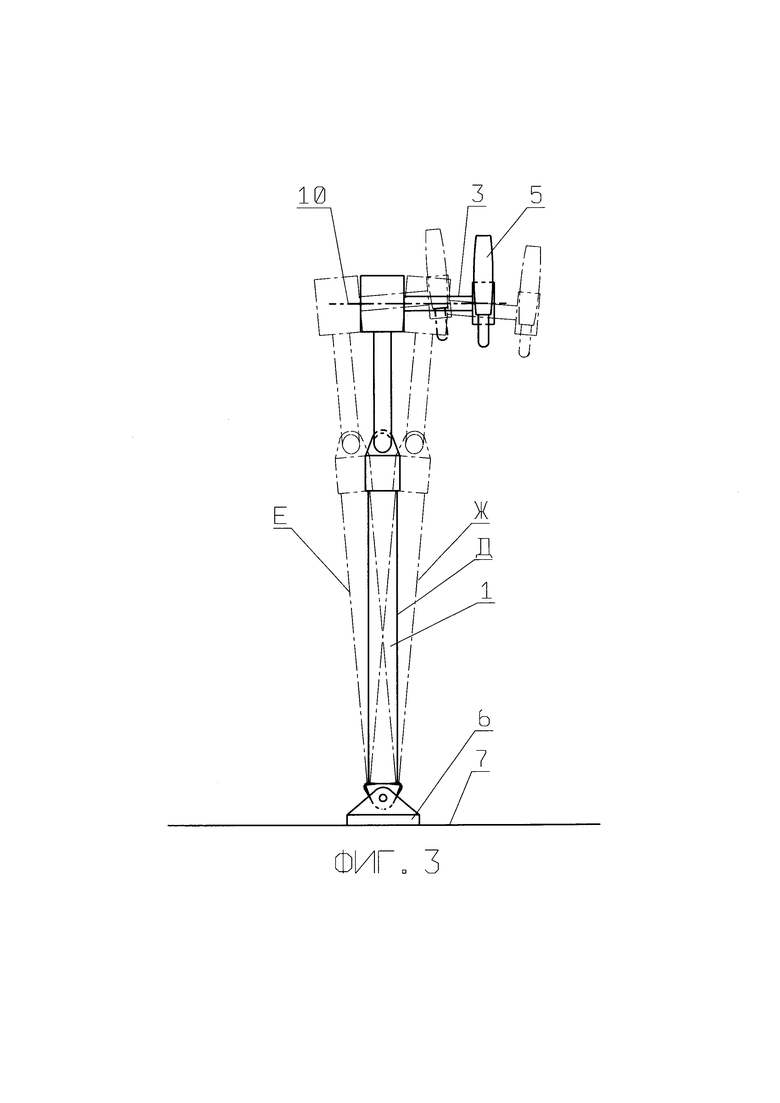
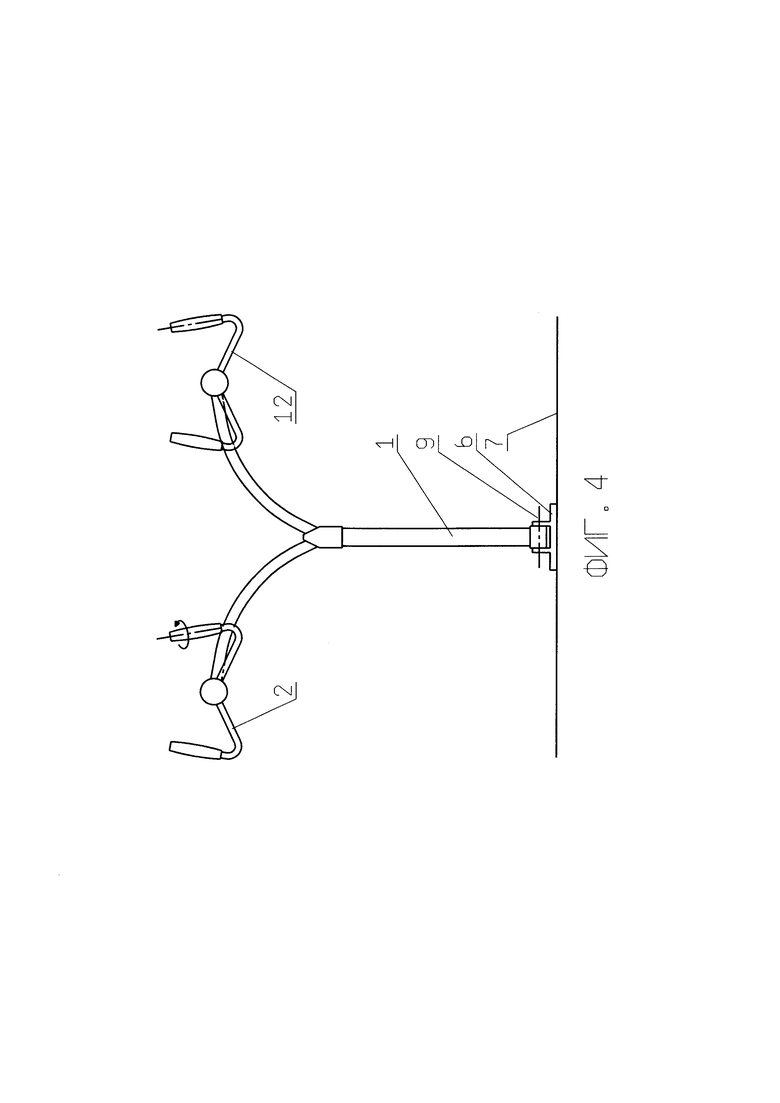
На ФИГ. 1÷4 показано заявляемое изобретение, где цифрами обозначено (обозначения идентичны для всех фигур чертежей): 1 - колонка штурвала; 2 - штурвал (штурвал левого пилота); 3 - вал штурвала; 4 - правая ручка штурвала; 5 - левая ручка штурвала; 6 - кронштейн крепления колонки штурвала 1 к полу кабины экипажа; 7 - линия пола кабины экипажа; 8 - ось вращения правой ручки штурвала; 9 - ось вращения колонки штурвала 1; 10 - ось вращения штурвала 2; 11 - стрелка, показывающая поворот правой ручки штурвала 4; 12 - второй штурвал (штурвал правого пилота); Б - положение штурвала 2 в его нейтральном положении (показано сплошными линиями); В - положение штурвала 2 при его повороте в крайнее левое положение (показано штрихпунктирными линиями); Г - положение штурвала 2 при его повороте в крайнее правое положение (показано штрихпунктирными линиями); Д - положение колонки штурвала 1 (и штурвала 2) при ее нейтральном положении (показано сплошными линиями); Е - положение колонки штурвала 1 (и штурвала 2) при ее повороте в крайнее переднее положение (показано штрихпунктирными линиями); Ж - положение колонки штурвала 1 (и штурвала 2) при ее повороте в крайнее заднее положение (показано штрихпунктирными линиями).
На ФИГ. 1 показан вид спереди на штурвал 2. Показано место выносного вида А.
На ФИГ. 2 показан выносной вид А.
На ФИГ. 3 показан вид сбоку на штурвала 2.
На ФИГ. 4 показан вид спереди на штурвала 2 в варианте исполнения заявляемого изобретения, когда у него на общей колонке штурвала 1 установлено два штурвала - штурвал 2 и штурвал 11.
Осуществление изобретения
Командный пост ручного управления летательным аппаратом, в частности пилотируемым вертолетом с одним несущим винтом (вертолетом одновинтовой схемы), имеет, колонку штурвала 1 (ФИГ. 1÷4), штурвал 2, вал штурвала 3. Колонка штурвала 1 своим нижним концом прикреплена шарнирно к кронштейну 6, который неподвижно прикреплен к полу кабины экипажа 7 (к неподвижной части конструкции вертолета) справа от левого пилота (справа от правой ноги левого пилота). Колонка штурвала 1 совместно со штурвалом 2 выполнены с возможностью вращения (поворота на определенный угол) вокруг оси вышеуказанного шарнира (вокруг оси вращения 9, которая расположена горизонтально и перпендикулярно плоскости симметрии вертолета) в продольной плоскости в направлении вперед-назад. То есть, колонка штурвала 1 совместно со штурвалом 2 выполнены с возможностью перемещения в продольной плоскости в направлении вперед-назад. Штурвал 2 прикреплен шарнирно к верхнему концу колонки штурвала 1, и выполнен с возможностью вращения (поворота на определенный угол) вокруг оси вышеуказанного шарнира (вокруг оси вращения 10, которая является продольной осью штурвала 2 - она расположена в продольной плоскости) в направлении влево-вправо.
Таким образом, колонка штурвала 1 и штурвал 2 у заявляемого изобретения конструктивно устроены точно также, как устроены колонка штурвала и штурвал у известных неманевренных самолетов.
В заявляемом изобретении штурвал 2 имеет две ручки - правую ручку штурвала 4 (с которой взаимодействует правая рука пилота) и левую ручку штурвала 5 (с которой взаимодействует левая рука пилота). Одна из ручек штурвала 2, в частности, правая ручка штурвала 4 (однако, вместо правой ручки штурвала 4 поворотной может быть и левая ручка штурвала 5), выполнена с возможностью вращения (поворота на определенный угол) вокруг свое продольной оси (оси вращения 8) с системой фиксации ее в любом положении (например, как это сделано у рычага общего шага НВ (рычага шаг-газ) у известных вертолетов). Направление поворота правой ручки штурвала на ФИГ. 1 показано стрелкой 11. То есть, правая поворотная ручка штурвала 4 выполнена наподобие известной из [4] вращающейся рукоятки на руле управления мотоциклом, которая управляет мощностью двигателя мотоцикла.
В заявляемом изобретении управление углами установки лопастей НВ выполнено как у известных вертолетов с одним несущим винтом – то есть, посредством АП известных конструкции (как один из возможных вариантов).
В заявляемом изобретении имеются также другие узлы и детали, необходимые для управления ЛА, которые не влияют на достигаемый в заявляемом изобретении технический результат, а поэтому здесь не приводятся.
Управление ЛА, при использовании на нем заявляемого изобретения, происходит следующим образом.
При повороте пилотом колонки штурвала 1 (совместно со штурвалом 2) относительно своей оси вращения 9 (ФИГ. 3) из своего нейтрального положения (из положения Д) вперед (в положение Е - «от себя») или назад (в положение Ж - «на себя») происходит наклон невращающегося кольца (и вращающегося кольца) АП в продольной плоскости (вперед или назад, соответственно), а, следовательно, происходит изменение циклического шага НВ (происходит циклическое изменение углов установки лопастей НВ) в продольной плоскости - происходит управление вертолетом по тангажу. То есть, перемещением штурвала 2 в направлении вперед-назад происходит управление вертолетом по тангажу. При этом, управляющий сигнал от колонки штурвала 1 к невращающемуся кольцу АП может передаваться, или посредством механической связи (посредством тяг и качалок), или посредством электрических (или оптических) сигналов к приводу невращающегося кольца АП (например, к гидроусилителю), или комбинацией из вышеуказанного, или любым иным приемлемым образом.
При повороте пилотом штурвала 2 (ФИГ. 2) относительно своей продольной оси вращения 10 из своего нейтрального положения (из положения Б) влево (в положение В) или вправо (в положение Г) происходит наклон невращающегося кольца (и вращающегося кольца) АП перекоса в поперечной плоскости (влево или вправо, соответственно), а, следовательно, происходит изменение циклического шага НВ (происходит циклическое изменение углов установки лопастей НВ) в поперечной плоскости - происходит управление вертолетом по крену. То есть, поворотом штурвала 2 в направлении влево-вправо происходит управление вертолетом по крену. При этом, управляющий сигнал от штурвала 2 к невращающемуся кольцу АП может передаваться, или посредством механической связи (посредством тяг и качалок), или посредством электрических (или оптических) сигналов к приводу невращающегося кольца АП (например, к гидроусилителю), или комбинацией из вышеуказанного, или любым иным приемлемым образом.
Таким образом, у заявляемого изобретения штурвал 2 служит для управления вертолетом по тангажу и крену, то есть, для управления циклическим шагом НВ (у известных вертолетов эту функцию выполняет рычаг циклического шага НВ).
При повороте (на определенный угол) правой ручки штурвала 4 относительно своей оси вращения 8 (вокруг продольной оси правой ручки штурвала 4) в ту или иную сторону (на ФИГ. 1÷2 стрелкой 11 показано направлении поворота правой ручки штурвала 4 только в одну сторону, однако, поворот правой ручки штурвала 4 осуществляется и в обратную сторону), осуществляемом правой рукой пилота, происходит перемещение (без наклона) невращающегося кольца (и вращающегося кольца) АП вверх или вниз, соответственно, вдоль оси вращения вала НВ. То есть, происходит изменение общего шага НВ (происходит одновременное изменение (увеличение или уменьшение) углов установки всех лопастей НВ). При этом, при повороте правой ручки штурвала 4 относительно своей оси вращения 8, автоматически поддерживается частота вращения НВ на нужном уровне (например, посредством стабилизатора частоты вращения НВ) – то есть, автоматически изменяется мощность двигателя. При этом, управляющий сигнал от правой ручки штурвала 4 к невращающемуся кольцу АП (и рычагу управления мощностью двигателя) может передаваться, или посредством механической связи (посредством тяг и качалок), или посредством электрических (или оптических) сигналов к приводу невращающегося кольца АП (например, к гидроусилителю), или комбинацией из вышеуказанного, или любым иным приемлемым образом.
Таким образом, у заявляемого изобретения правая поворотная ручка штурвала 4 служит для изменения общего шага НВ и мощности двигателя (или двигателей).
У известных пилотируемых вертолетов использование командного поста ручного управления в виде штурвального управления (которое более удобно, по сравнению с используемой на известных вертолетах комбинацией рычага управления циклическим шагом НВ и рычага управления общим шагом НВ) невозможно по следующим причинам. При штурвальном управлении обе руки пилота (правая и левая) должны взаимодействовать со штурвалом. Однако, в известных конструкциях систем управления пилотируемыми вертолетами имеется отдельно вышеуказанный рычаг общего шага НВ (рычаг шаг-газ), который располагается с левой стороны пилота, с которым должна постоянно взаимодействовать левая рука пилота. Таким образом, у пилота известных вертолетов остается свободной только правая рука. Однако, управление штурвалом только правой рукой неудобно. Поэтому, ни у одного известного вертолета штурвальное управление не используется.
В заявляемом изобретение управление циклическим и общим шагом НВ и мощностью двигателя сосредоточено на едином органе - штурвале 2 с его поворотной правой ручкой штурвала 4, что делает пилотирование вертолета более удобным и естественным. Это также будет способствовать повышению безопасности полета и уменьшению времени, затрачиваемого на подготовку пилотов.
Расположение в заявляемом изобретении колонки штурвала 1 справа от левого пилота (справа от правой ноги левого пилота) позволяет, уменьшить расстояние между педалями ножного управления вертолетом по курсу до минимальной величины, и упростить компоновку кабины экипажа.
Таким образом, заявляемое изобретение может быть использовано на вертолете, как с механической системой управления, так и с электродистанционной системой управления. При этом, в варианте с электродистанционной системой управления усилия, идущие от невращающегося кольца АП на колонку штурвала 1, на штурвал 2 и на поворотную правую ручку штурвала 4 будет невелики, и будут определяться усилиями от загрузочных механизмов.
Возможен вариант исполнения заявляемого изобретения, когда у него левая ручка штурвала 5 (так же как и правая ручка штурвала 4) выполнена с возможностью поворота (в одну и другую сторону, на определенный угол) вокруг своей продольной оси (так же, как правая ручка штурвала 4). Путем вышеуказанного поворота левой ручки штурвала 5 пилот может корректировать мощность двигателя (или двигателей) в допустимых пределах независимо от общего шага НВ (то есть, осуществляется регулирование частоты вращения НВ - путем изменения мощности двигателя). Правая поворотная ручка штурвала 4 будет управлять только общим шагом НВ. При этом, управляющий сигнал от левой ручки штурвала 5 к двигателю может передаваться или посредством механической связи (посредством тяг и качалок), или посредством электрических (или оптических) сигналов, или комбинацией из вышеуказанного, или любым иным приемлемым образом.
Возможен вариант исполнения заявляемого изобретения, когда у него правая ручка штурвал 4 разделена на две поворотные ручки (равной или неравной длины), из которых, например, нижняя ручка управляет общем шагом НВ, а верхняя ручка используется для коррекции частоты вращения НВ (коррекции мощности двигателя) в допустимых пределах независимо от общего шага НВ.
Возможен вариант исполнения заявляемого изобретения (ФИГ. 4), когда у него к колонке штурвала 1 прикреплен второй штурвал 12 (для второго (правого) пилота). То есть, в этом случае имеется одна общая для двух штурвалов колонка штурвала 1, имеющая в верхней своей части ответвления для левого (штурвал 2) и правого (штурвал 12) штурвалов. При этом, колонка штурвала 1 прикреплена шарнирно к кронштейну 6, а он прикреплен неподвижно к полу кабины экипажа 7 между левым и правым пилотами (между правой ногой левого пилота и левой ногой правого пилота).
Возможен вариант исполнения заявляемого изобретения, отличающийся от показанного на ФИГ. 4 варианта тем, что у него каждый штурвал имеет свою отдельную колонку штурвала.
В заявляемом изобретении колонка штурвала и штурвал могут иметь любую приемлемую конструкцию.
В заявляемом изобретении колонка штурвала может располагаться в любом приемлемом месте: справа от левого пилота (как рассмотрено выше и показано на ФИГ. 1÷4); между ногами левого пилота; и другое.
Возможен вариант исполнения заявляемого изобретения, когда у него штурвал 2 выполнен с возможность поворота вокруг своей вертикальной оси (то есть правая ручка штурвала 4 перемещается вперед, а левая ручка штурвала 5 перемещается назад, или наоборот), как у известного из [3] технического решения. За счет этого происходит управление вертолетом по курсу. В этом варианте все управление вертолетом сосредоточено на одном органе управления - на штурвале 2. Такой трехкоординатный пост ручного управления вертолетом обеспечивает снижение веса конструкции системы управления в кабине экипажа за счет отказа от ножного управления. Это также позволит снять медицинские ограничения к летному составу по состоянию ног, так как не требуется согласование положения кресла по высоте и по расстоянию до педалей, ввиду отсутствия педалей.
Возможен вариант исполнения заявляемого изобретения, когда у него колонки штурвала (выполненной с возможностью поворота вокруг своей оси вращения, как показано на ФИГ. 1÷4) как таковой нет. В этом случае штурвал выполнен с возможностью прямолинейного перемещения в своих направляющих вперед-назад, и тем самым происходит управление летательным аппаратом по тангажу. При этом, управляющий сигнал от штурвала 2 к невращающемуся кольцу АП может передаваться, или посредством механической связи (посредством тяг и качалок), или посредством электрических (или оптических) сигналов к приводу невращающегося кольца АП (например, к гидроусилителю), или комбинацией из вышеуказанного, или любым иным приемлемым образом.
Выше были рассмотрены варианты исполнения заявляемого изобретения, когда для управления вертолетом по тангажу и крену используется известный АП. То есть, для управления углами установки лопастей НВ используется АП.
Однако, в заявляемом изобретении управление углами установки лопастей НВ может быть выполнено любым иным приемлемым образом: посредством известных конструкций АП (как рассмотрено выше); с помощью индивидуального управления углом установки каждой лопастью НВ (любого конструктивного исполнения); и другое.
Таким образом, в заявляемом изобретении штурвал 2 выполнен для управления вертолетом по тангажу и крену вне зависимости от того, за счет чего это обеспечивается (за счет использования АП или иного устройства).
Заявляемое изобретение может быть использовано на любых типах пилотируемых ЛА: вертолетах - одновинтовых (как рассмотрено выше) или многовинтовых; самолетах (любых типов); автожирах; и других типах ЛА. При этом, на вертолетах штурвал используется для управления по тангажу и крену, а поворотная ручка штурвала (например, правая) используется для управления общим шагом НВ и мощностью двигателя (двигателей). На самолетах штурвал используется для управления по тангажу и крену, а поворотная ручка штурвала (например, правая) используется для управления мощностью двигателя (двигателей).
Заявляемое изобретение может быть использовано для дистанционного управления беспилотными или пилотируемыми ЛА. В этом случае оператор, находящийся вне управляемого им ЛА (например, находящийся на земле), посредством заявляемого изобретения управляет ЛА по тангажу, крену, мощностью двигателя (или двигателей) и общим шагом НВ (в случае управления вертолетом).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2017 |
|
RU2672308C1 |
| ВИНТ, НАПРИМЕР НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА | 2020 |
|
RU2740717C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2509033C1 |
| НЕСУЩАЯ ПОВЕРХНОСТЬ | 2017 |
|
RU2678905C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2562259C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2577824C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2020 |
|
RU2740718C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2495796C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2012 |
|
RU2486105C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2639352C1 |
Заявляемое изобретение имеет отношение к авиации и касается командных постов ручного управления летательного аппарата, в частности вертолета с одним несущим винтом. Командный пост ручного управления летательного аппарата имеет штурвал, выполненный с возможностью перемещения в продольной плоскости в направлении вперед-назад и с возможностью вращения вокруг своей продольной оси в направлении влево-вправо. Штурвал выполнен с возможностью управления летательным аппаратом по тангажу за счет вышеуказанного перемещения штурвала в направлении вперед-назад. Штурвал выполнен с возможностью управления летательным аппаратом по крену за счет вышеуказанного вращения штурвала в направлении влево-вправо. Штурвал имеет две ручки, левую и правую, выполненные с возможностью взаимодействия с левой и правой руками пилота. При этом по меньшей мере одна из вышеуказанных ручек штурвала, например правая, выполнена с возможностью вращения вокруг своей продольной оси. Задачей заявляемого изобретения является облегчение пилотирования вертолета, уменьшение времени, необходимого для обучения пилотов. При этом управление вертолетом должно быть удобным и естественным. 6 з.п. ф-лы, 4 ил.
1. Командный пост ручного управления летательного аппарата имеет штурвал, выполненный с возможностью перемещения в продольной плоскости, в направлении вперед-назад, и с возможностью вращения вокруг своей продольной оси, в направлении влево-вправо, штурвал выполнен с возможностью управления летательным аппаратом по тангажу, за счет вышеуказанного перемещения штурвала в направлении вперед-назад, штурвал выполнен с возможностью управления летательным аппаратом по крену, за счет вышеуказанного вращения штурвала в направлении влево-вправо, штурвал имеет две ручки, левую и правую, выполненные с возможностью взаимодействия с левой и правой руками пилота, соответственно, отличающийся тем, что по меньшей мере одна из вышеуказанных ручек штурвала, например правая, выполнена с возможностью вращения вокруг своей продольной оси.
2. Командный пост ручного управления летательного аппарата по п. 1, отличающийся тем, что имеет колонку штурвала, которая нижним своим концом шарнирно прикреплена к неподвижной части конструкции летательного аппарата, вышеуказанная колонка штурвала выполнена с возможностью вращения относительно оси вышеуказанного шарнира в направлении вперед-назад, вышеуказанный штурвал шарнирно прикреплен к верхнему концу вышеуказанной колонки штурвала.
3. Командный пост ручного управления летательного аппарата по п. 1 или 2, отличающийся тем, что он использован для управления самолетом, вышеуказанная поворотная ручка штурвала выполнена с возможностью управления мощностью двигателя или двигателей самолета.
4. Командный пост ручного управления летательного аппарата по п. 1 или 2, отличающийся тем, что он использован для управления вертолетом, например, с одним несущим винтом, вышеуказанная поворотная ручка штурвала выполнена с возможностью управления общим шагом несущего винта.
5. Командный пост ручного управления летательного аппарата по п. 4, отличающийся тем, что вышеуказанная поворотная ручка штурвала выполнена с возможностью управления общим шагом несущего винта и мощностью двигателя или двигателей вертолета.
6. Командный пост ручного управления летательного аппарата по п. 4, отличающийся тем, что вторая из вышеуказанных ручек штурвала, левая, выполнена с возможностью вращения вокруг своей продольной оси и выполнена с возможностью управления мощностью двигателя или двигателей вертолета.
7. Командный пост ручного управления летательного аппарата по п. 1 или 2, отличающийся тем, что штурвал выполнен с возможностью поворота вокруг своей вертикальной оси, штурвал выполнен с возможностью управления летательным аппаратом по курсу за счет вышеуказанного поворота штурвала вокруг его вертикальной оси.
| US 4114843 A, 19.09.1978 | |||
| CA 2988687 A1, 12.06.2019 | |||
| US 3746284 A, 17.07.1973. |

