Изобретение относится к способам и средствам мониторинга окружающей среды и может быть использовано для контроля и очистки загрязнений сточных вод и поверхностных вод природных водоемов.
Как известно, исследования качественного и количественного состава сточных вод часто затруднено вследствие их сложного состава, широкого интервала концентраций примесей, изменения состава сточных вод во времени. Многие вещества уже в очень малых концентрациях вызывают изменения качества воды, и определение их количества в воде связано со значительными трудностями.
При аналитическом контроле работы очистных сооружений немаловажное значение имеет время, затрачиваемое на проведение анализа. Часто при анализе сточных вод возникают трудности, связанные с присутствием сопутствующих и мешающих веществ, не предусмотренных в стандартных методиках.
Особое значение имеет применение автоматических приборов, которые позволяют не только повысить производительность труда химиков-аналитиков и снизить стоимость анализов, но и осуществить непрерывный контроль состава сточных вод и работы очистных сооружений, а также немедленно зафиксировать любые нарушения.
Известны способы и устройства контроля загрязнения путем измерения концентрации загрязняющего компонента в воде с помощью переносных приборов или стационарных многопараметрических анализаторов [авт. свид. СССР №1134547, кл. C02F 1/00, G01N 33/18, 1985 /Белогуров В.П., Попов Л.Е., Микоткин Б.Г. Автоматическая станция контроля качества природных и сточных вод].
Недостатком устройства является низкая достоверность контроля загрязнений, так как не учитывается состояние водной среды в промежутках времени между анализами.
Известен способ измерения загрязнения реки сточными водами [пат. 2415420 РФ, МПК G01N 33/18, G01N 1/00 / Мазуркин П.М., Воронцова З.В. - №2009133899/15; заявл. 09.09.2009; опубл. 27.03.2011], включающий отбор проб воды в постоянных и временных пунктах наблюдений, их анализ и оценку результатов измерений, при этом для оценки результатов измерений в динамике вдоль основного русла реки эти результаты измерений подвергают статистическому моделированию для выявления биотехнических закономерностей изменения концентрации загрязняющих веществ в речной воде.
Недостатком данного способа является низкая достоверность контроля загрязнений, так как не учитывается состояние водной среды в промежутках времени между анализами, то есть когда производится взятие, хранение взятых проб и обработка полученных результатов. При этом загрязнение вообще может не попасть в пробу или в зону контроля.
Наиболее близким к заявляемому техническому решению является устройство устранения аварийного выброса [патент №153362 РФ МПК G01N 15/06 / Алексеев В.А., Девятое Н.А., Юран С.И., Усольцев В.П., заявка 2014141487/28 от 14.10.2014; опубл. 20.07.2015], взятое в качестве прототипа.
В данном техническом решении, выполняется измерение оптической плотности водной среды как в основном канале движения жидкости, так и в отводах, сравнение текущих значений оптической плотности с эталонными значениями оптической плотности контролируемой среды, хранящимися в блоке обработки и управления. Если оптическая плотность жидкости не превышает допустимого порогового значения, контролируемая среда фильтруется с помощью фильтра очистки, который расположен в основном канале. В случае выхода величины текущей оптической плотности за допустимые пороги, что может произойти, например, при аварии на объекте контроля, формируются управляющие сигналы на те элементы блокировки контролируемой среды (задвижки), в отводах которых установлены дополнительные фильтры, предназначенные для фильтрации соответствующих компонентов, содержащихся в продуктах аварийного выброса. При открытии соответствующих задвижек компоненты аварийного выброса фильтруются дополнительными фильтрами, установленными в этих отводах, после чего очищенная вода поступает в окружающую среду. В случае выхода величины текущей оптической плотности возможных остатков загрязняющего вещества за допустимый порог они вместе с контролируемой средой утилизируются.
Недостатком прототипа является низкая достоверность контроля, поскольку контролируется только один параметр водной среды, а именно, оптическая плотность, измеренная на одной длине волны излучения.
Задачей изобретения является повышение достоверности контроля состава сточных вод предприятий.
В случае возникновения аварийного сброса в виде сгустка, состоящего из нескольких загрязняющих веществ, возникает задача идентификации сгустка для направления его в выделенный для него фильтр. При этом в течение времени концентрация компонентов сгустка может изменяться, а состав сгустка, то есть соотношение между его компонентами, остается без изменения. Поэтому использование оптических датчиков с несколькими длинами волн излучения позволяет точнее определить состав сгустка по соотношению спектральных составляющих выходных сигналов.
Технический результат: снижение вероятности пропуска заранее известных загрязнений, которые могут появиться в сточных водах, например, в результате аварии на промышленном предприятии и, следовательно, повышение качества очистки сточных вод за счет оперативного выбора соответствующего фильтра очистки.
Поставленная задача достигается тем, что по сравнению с известным техническим решением, включающим измерение оптической плотности в основном канале движения контролируемой среды и отводах от основного канала, снабженных элементами блокировки движения контролируемой среды (задвижками) и дополнительными фильтрами, предназначенными для фильтрации соответствующих загрязняющих компонентов, содержащихся в сточных водах, сравнение текущих значений оптической плотности водной среды в каждом из отводов с хранящимися известными значениями оптической плотности компонентов среды, которые могут присутствовать в сточных водах, и управление соответствующими элементами блокировки движения контролируемой среды (задвижками) сигналами, полученными по результатам сравнения, предложенное техническое решение включает измерение n значений оптической плотности контролируемой среды на различных длинах волн оптического излучения, представление измеренных значений в виде решетчатой функции, формирование на основе полученной решетчатой функции текущей матрицы отношения, сравнение текущей матрицы отношения с матрицами отношений, предварительно полученными с помощью блока подготовки эталонов, и хранящимися в блоке эталонов, и по результатам сравнения формирование сигналов управления элементами блокировки движения контролируемой среды (задвижками).
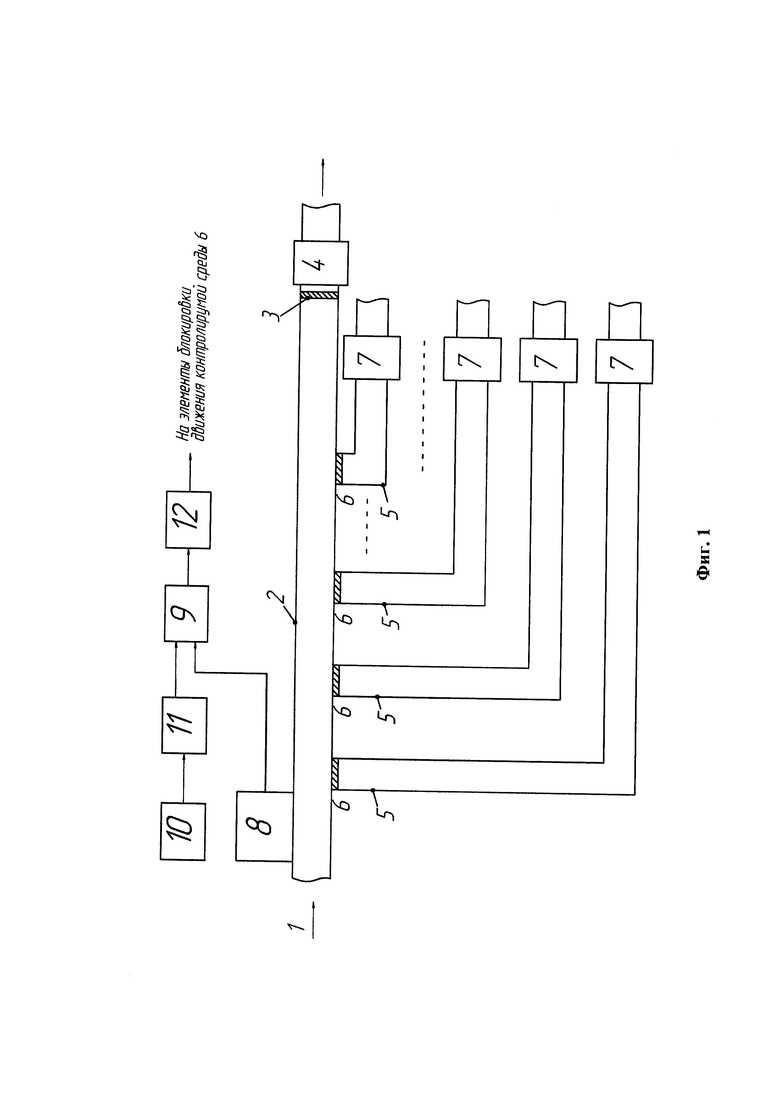
Устройство, реализованное на основе предложенного способа, поясняется структурной схемой, приведенной на фиг. 1. Устройство содержит контролируемую среду 1, основной канал 2 движения контролируемой среды, например, трубопровод, элемент блокировки движения контролируемой среды (задвижку) 3 и фильтр очистки 4, установленные на выходе основного канала 2, отводы (ответвления) 5 от канала 2, снабженные элементами блокировки движения контролируемой среды (задвижками) 6 и фильтрами очистки 7 соответствующих компонентов загрязнений, анализатор оптической плотности контролируемой среды 8, включающий n оптоэлектронных датчиков, имеющих источники излучения с различной длиной волны, и установленных в канале 2 до расположения первого отвода (ответвления) 5, и устройств обработки и преобразования, выход анализатора оптической плотности контролируемой среды 8 соединен с одним из входов блока распознавания 9, а другой вход блока распознавания 9 подключен к последовательно соединенным блоком подготовки эталонов 10 и блоком эталонов 11, а выход блока распознавания 9 соединен с блоком управления элементами блокировки движения контролируемой среды (задвижками) 12. Для повышения точности контроля в анализаторе оптической плотности контролируемой среды 8 может быть использовано, например, 5-6 источников излучения (лазеров) с различной длиной волны. При этом может быть более точно установлен состав загрязняющего вещества или сгустка, которые появились в водной среде в результате, например, аварии на контролируемом предприятии.
Блок подготовки эталонов, блок эталонов и блок распознавания могут быть реализованы в виде микропроцессорной системы, например персонального компьютера, снабженного жестким диском достаточной емкости для хранения эталонов и обладающего достаточной вычислительной мощностью для реализации алгоритмов распознавания. Блок управления элементами блокировки движения контролируемой среды может быть реализован в виде промышленного контроллера в индустриальном исполнении.
В анализаторе оптической плотности контролируемой среды 8 сигналы с n датчиков, пропорциональные значениям оптической плотности контролируемой среды на различных частотах излучения, обрабатываются и представляются в виде решетчатой функции, которая отражает амплитудные значения оптической плотности на разных частотах излучения. Каждая решетчатая функция имеет свою форму огибающей. Форму решетчатой функции удобно анализировать с помощью матрицы отношения составляющих решетчатой функции, построенную через отношения порядка между составляющими решетчатой функции [Алексеев В.А., Дизендорф К.И., Юран С.И. Классификатор пульсовых кривых с использованием матриц отношения // Интеллектуальные системы в производстве. - 2010. - №1(15) - Ижевск: Изд-во ИжГТУ. - С. 231-235]. Представление решетчатой функции в виде матрицы отношения инвариантно к линейным изменениям решетчатой функции, что имеет существенное значение для анализа характеристик потоков с различной плотностью сточных вод.
Блок эталонов 11 формируется заранее с помощью блока подготовки эталонов 10 на основе экспериментального исследования значений оптической плотности контролируемой среды, содержащей возможные компоненты загрязняющих веществ контролируемого предприятия, на различных длинах волн излучения. Основным элементом блока 10 является спектрофотометр. На основе полученных значений оптической плотности формируется решетчатая функция для каждого из возможных компонентов загрязняющих веществ и на ее основе строится матрица отношения. После этого матрицы отношений всех возможных компонентов загрязняющих веществ контролируемого предприятия заносятся в блок эталонов 11.
В блоке распознавания 9 производится сравнение текущих матриц отношений, полученных в результате измерений оптических плотностей контролируемой среды и матриц отношений, хранящихся в блоке эталонов 11.
Предлагаемый способ контроля и очистки сточных вод реализуется следующим образом.
В процессе контроля сигналы с n датчиков, пропорциональные значениям оптической плотности контролируемой среды, обрабатываются и преобразуются в анализаторе 8 в виде решетчатой функции, которая отражает амплитудные значения оптической плотности контролируемой среды на различных частотах излучения. Далее из значений решетчатой функции формируется текущая матрица отношения. Значения этой матрицы отношения поступают в блок распознавания 9, в котором сравниваются значения текущей матрицы отношения со значениями эталонных матриц отношений, хранящихся в блоке эталонов 11. Если в результате сравнения произошло совпадение элементов текущей матрицы с элементами какой-либо эталонной матрицы или элементами нескольких матриц, в блоке управления элементами блокировки движения контролируемой среды (задвижками) 12 вырабатываются сигналы управления на закрытие элемента блокировки движения контролируемой среды (задвижки) 3 на основном трубопроводе 2 и открытие одной или набора (нескольких) элементов блокировки движения контролируемой среды (задвижек) 6, на отводах 5, что позволяет отвести протекающие в данный момент сточные воды с выявленным составом загрязнений на соответствующие фильтры 7 для устранения выявленных компонентов загрязнений. Если в результате сравнения не произошло совпадений элементов текущей матрицы с элементами эталонных матриц, водная среда направляется на общий фильтр 4 после открытия заслонки 3.
Следует сказать, что главная диагональ матрицы отношения достаточно полно характеризует решетчатую функцию. Поэтому для оперативности контроля можно вместо сравнения всех элементов матриц отношений ограничиться сравнением элементов только главных диагоналей текущей и эталонных матриц отношений.
Процесс сравнения с использованием представления компонентов загрязнений в виде матрицы отношения занимает незначительное время. Это позволяет оперативно выбирать соответствующий фильтр и тем самым повысить качество очистки сточных вод.
Реализация предложенного способа позволяет с большей степенью вероятности распознать эти загрязнения за счет более точного описания параметров известных заранее загрязнений, появившихся в водной среде, что повышает достоверность контроля, и позволяет правильно (целенаправленно) выбрать варианты очистки водной среды от этих загрязнений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СЕЛЕКТИВНОГО КОНТРОЛЯ АВАРИЙНЫХ СБРОСОВ | 2021 |
|
RU2771221C1 |
| Устройство контроля аварийных сбросов | 2022 |
|
RU2792152C1 |
| Установка мониторинга качества и управления потоками подтоварной воды для системы ППД | 2022 |
|
RU2798259C1 |
| СПОСОБ ИНТЕРПОЛЯЦИОННОГО КОНТРОЛЯ ЗАГРЯЗНЕННОСТИ СТОЧНЫХ ВОД И ПРОМЫШЛЕННЫХ СТОКОВ | 2019 |
|
RU2710358C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОЙ ОБРАБОТКИ ЗАГРЯЗНЕННЫХ ЖИДКОСТЕЙ | 2008 |
|
RU2454698C2 |
| СПОСОБ ИЗМЕРЕНИЙ ДЕБИТОВ, КОНТРОЛЯ И УПРАВЛЕНИЯ ТЕХНОЛОГИЕЙ ДОБЫЧИ ПРОДУКЦИИ НЕФТЯНЫХ СКВАЖИН И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2365750C1 |
| Способ исследования оптической плотности текущей жидкости | 2020 |
|
RU2756373C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661674C1 |
| Способ контроля состояния жидкой текущей среды | 2020 |
|
RU2747962C1 |
| Устройство для управления процессом сброса сточных вод в водосток | 1988 |
|
SU1692943A1 |
Изобретение относится к способам и средствам мониторинга окружающей среды и может быть использовано для контроля и очистки загрязнений сточных вод и поверхностных вод природных водоемов. Способ включает измерение оптической плотности в основном канале движения контролируемой среды и отводах от основного канала, снабженных элементами блокировки движения контролируемой среды и дополнительными фильтрами, предназначенными для фильтрации соответствующих загрязняющих компонентов, содержащихся в сточных водах, сравнение текущих значений оптической плотности водной среды в каждом из отводов с хранящимися известными значениями оптической плотности компонентов среды, которые могут присутствовать в сточных водах, и управление соответствующими элементами блокировки движения контролируемой среды сигналами, полученными по результатам сравнения. По способу дополнительно выполняют измерение n значений оптической плотности контролируемой среды на различных длинах волн оптического излучения, представление измеренных значений в виде решетчатой функции, формирование на основе полученной решетчатой функции текущей матрицы отношения, сравнение текущей матрицы отношения с матрицами отношений, предварительно полученными с помощью блока подготовки эталонов и хранящимися в блоке эталонов, и по результатам сравнения формирование сигналов управления элементами блокировки движения контролируемой среды. Технический результат заключается в повышении качества очистки сточных вод за счет оперативного выбора соответствующего фильтра очистки, что приводит к снижению вероятности пропуска заранее известных загрязнений, которые могут появиться в сточных водах, например, в результате аварии на промышленном предприятии. 2 з.п. ф-лы, 1 ил.
1. Способ контроля и очистки сточных вод, включающий измерение оптической плотности в основном канале движения контролируемой среды и отводах от основного канала, снабженных элементами блокировки движения контролируемой среды и дополнительными фильтрами, предназначенными для фильтрации соответствующих загрязняющих компонентов, содержащихся в сточных водах, сравнении текущих значений оптической плотности водной среды в каждом из отводов с хранящимися известными значениями оптической плотности загрязняющих компонентов среды, которые могут присутствовать в сточных водах, и управлении соответствующими элементами блокировки движения контролируемой среды с помощью сигналов, полученных по результатам сравнения, отличающийся тем, что он включает измерение n значений оптической плотности контролируемой среды на различных длинах волн оптического излучения, представление измеренных значений в виде решетчатой функции, формирование на основе полученной решетчатой функции текущей матрицы отношения, сравнение текущей матрицы отношения с матрицами отношений, предварительно полученными с помощью блока подготовки эталонов и хранящимися в блоке эталонов, и по результатам сравнения формирование сигналов управления элементами блокировки движения контролируемой среды.
2. Способ по п. 1, отличающийся тем, что в качестве элементов блокировки движения контролируемой среды применяют задвижки.
3. Способ по п. 1, отличающийся тем, что анализатор оптической плотности контролируемой среды выполняют на основе оптоэлектронных датчиков, совмещают их с источниками излучения с различной длиной волны и устанавливают в основном канале до расположения первого отвода.
| Станок для расшлифовки волочильного канала в твердосплавных фильерах | 1957 |
|
SU113845A1 |
| 0 |
|
SU153362A1 | |
| СПОСОБ ИЗМЕРЕНИЯ ЗАГРЯЗНЕНИЯ РЕКИ СТОЧНЫМИ ВОДАМИ | 2009 |
|
RU2415420C1 |
| Автоматическая станция контроля качества природных и сточных вод | 1983 |
|
SU1134547A1 |

