Настоящее изобретение относится к области сетей или систем беспроводной связи, более конкретно, к базовой станции, способу для ее функционирования, сети беспроводной связи и способу для ее функционирования. Настоящее изобретение дополнительно относится к определению местоположения (локализации) при помощи формирования диаграммы направленности в системах мобильной сотовой связи.
В современных сетях мобильной связи, локализация может быть основана на последовательностях опорных сигналов позиционирования (PRS), передаваемых в физическом совместно используемом канале нисходящей линии связи (PDSCH), как описано в [1, 2]. Множество пользовательских оборудований (UE) могут использовать последовательности PRS для оценки разности времен прихода (TDoA), как описано в [3].
Существует необходимость в улучшении локализации в сетях беспроводной связи.
Эта задача решается посредством заявленного предмета, как определено в независимом пункте формулы изобретения.
Изобретатели обнаружили, что путем передачи сигнала позиционирования в направлении к пользовательскому оборудованию, в котором должно быть определено положение, т.е., с более высокой мощностью сигнала в направлении к UE или по сравнению с другим направлением, определение положения может быть улучшено. Улучшение может быть получено ввиду более высокой точности и/или ввиду более высокого числа пользовательских оборудований, которые могут принимать сигнал позиционирования. Направленность может обеспечить возможность высокой мощности сигнала и/или высокого отношения сигнал–шум для путей по линии видимости в пользовательском оборудовании и может, таким образом, обеспечить улучшение.
В соответствии с вариантом осуществления, базовая станция сконфигурирована, чтобы управлять сотой сети беспроводной связи в сети беспроводной связи. Базовая станция сконфигурирована, чтобы использовать информацию грубого положения, относящуюся к грубому положению пользовательского оборудования. Для определения информации точного положения, относящейся к пользовательскому оборудованию, базовая станция сконфигурирована, чтобы передавать сигнал позиционирования на пользовательское оборудование и чтобы направлять передачу сигнала позиционирования к пользовательскому оборудованию. Базовая станция сконфигурирована, чтобы принимать ответный сигнал от пользовательского оборудования, ответный сигнал содержит данные, относящиеся к сигналу позиционирования и указывающие параметр приема сигнала позиционирования. Базовая станция сконфигурирована, чтобы предоставлять параметр приема последовательности на вычислитель для определения информации точного положения. Вычислитель может быть расположен в базовой станции, другой базовой станции или дополнительном сетевом узле, таком как сервер определения местоположения. Направление передачи сигнала позиционирования к пользовательскому оборудованию может обеспечивать высокую мощность сигнала для сигнала позиционирования в пользовательском оборудовании и может, таким образом, обеспечивать высокую точность определения местоположения и/или может обеспечивать уровень мощности сигнала, достаточно высокий для приема и обнаружения пользовательским оборудованием.
В соответствии с вариантом осуществления, параметр приема относится к по меньшей мере одному из времени прихода сигнала позиционирования, разности времени прихода совокупности сигналов позиционирования и/или направления прихода сигнала позиционирования. Это может обеспечивать точную локализацию пользовательского оборудования.
В соответствии с вариантом осуществления, базовая станция сконфигурирована, чтобы принимать информацию грубого положения от сервера определения местоположения сети беспроводной связи или от дополнительной базовой станции. Это может обеспечивать возможность использования информации действительного грубого положения, чтобы направить сигнал позиционирования в действительное положение пользовательского оборудования. В соответствии с вариантом осуществления, базовая станция сконфигурирована, чтобы принимать сигнал от пользовательского оборудования, содержащий информацию положения, причем базовая станция сконфигурирована, чтобы использовать принятую информацию положения в качестве грубой информации. Информация положения, принятая посредством пользовательского оборудования, может содержать информацию, например, получаемую посредством услуг локализации пользовательского оборудования, например, на основе спутниковой системы позиционирования. Это может обеспечивать возможность точного направления сигнала позиционирования к пользовательскому оборудованию.
В соответствии с вариантом осуществления, пользовательское оборудование представляет собой первое пользовательское оборудование. Базовая станция сконфигурирована, чтобы обслуживать первое и второе пользовательское оборудование. Базовая станция дополнительно сконфигурирована, чтобы исключать направление ко второму пользовательскому оборудованию и/или направление к дополнительной базовой станции из направления сигнала позиционирования. Это может обеспечивать возможность низкой помехи во втором пользовательском оборудовании и/или в дополнительной базовой станции. В соответствии с вариантом осуществления, базовая станция сконфигурирована, чтобы повторять определение положения пользовательского оборудования на последующих этапах. Базовая станция сконфигурирована, чтобы использовать информацию точного положения пользовательского оборудования, определенную на первом этапе, в качестве информации грубого положения на втором этапе, следующем за первым этапом. Это может обеспечивать возможность последующего увеличения точности соответствующей информации точного положения.
В соответствии с вариантом осуществления, базовая станция сконфигурирована, чтобы направлять сигнал позиционирования с использованием метода формирования диаграммы направленности (луча). Базовая станция сконфигурирована, чтобы уменьшать ширину второй диаграммы направленности, используемой на втором этапе, по сравнению с шириной первой диаграммы направленности, используемой на первом этапе. Таким образом, ширина диаграммы направленности может быть уменьшена несколько раз. Это может обеспечивать возможность последующего увеличения мощности сигнала в пользовательском оборудовании и/или последующего уменьшения сигналов помехи с направления в стороне от пользовательского оборудования.
В соответствии с вариантом осуществления, базовая станция сконфигурирована, чтобы принимать информацию управления от пользовательского оборудования, и чтобы направлять передачу сигнала позиционирования к пользовательскому оборудованию в ответ на информацию управления, чтобы реализовывать первую диаграмму направленности передачи. Базовая станция сконфигурирована, чтобы передавать сигнал позиционирования в соответствии со второй диаграммой направленности передачи в отсутствие информации управления. Это может позволить направлять сигнал позиционирования к пользовательскому оборудованию, когда требуется или запрашивается пользовательским оборудованием, и использовать другую диаграмму направленности, если такое требование не сигнализируется.
В соответствии с вариантом осуществления, пользовательское оборудование представляет собой первое пользовательское оборудование, и сигнал позиционирования представляет собой первый сигнал позиционирования. Базовая станция сконфигурирована, чтобы передавать первый сигнал позиционирования, содержащий первую последовательность из множества предопределенных последовательностей для сигналов позиционирования. Базовая станция сконфигурирована, чтобы передавать второй сигнал позиционирования, содержащий вторую последовательность из множества последовательностей, в направлении второго пользовательского оборудования, в то же время не передавая второй сигнал позиционирования в направлении первого пользовательского оборудования. Это может позволить избегать помех, в частности, помех между последовательностями. Индивидуальные последовательности формирования диаграммы направленности для индивидуального пользовательского оборудования могут обеспечивать возможность большого числа адресуемых пользовательских оборудований, например, в одно и то же время.
В соответствии с вариантом осуществления, сеть беспроводной связи содержит первую базовую станцию и вторую базовую станцию в соответствии с вариантами осуществления, описанными в настоящем документе, и содержит пользовательское оборудование. Первая базовая станция и вторая базовая станция сконфигурированы, чтобы координированным образом использовать метод формирования диаграммы направленности для передачи первого и второго сигнала позиционирования. Это может позволить дополнительно увеличить мощность сигнала в пользовательском оборудовании при приеме сигналов позиционирования, передаваемых другими базовыми станциями.
В соответствии с вариантом осуществления, способ функционирования базовой станции, управляющей сотой сети беспроводной связи в сети беспроводной связи, содержит использование информации грубого положения, относящейся к грубому положению пользовательского оборудования. Способ содержит передачу сигнала позиционирования на пользовательское оборудование и направление передачи сигнала позиционирования к пользовательскому оборудованию для определения информации точного положения, относящейся к пользовательскому оборудованию. Способ содержит прием ответного сигнала от пользовательского оборудования, причем ответный сигнал содержит данные, относящиеся к сигналу позиционирования и указывающие параметр приема сигнала позиционирования. Способ содержит предоставление параметра приема последовательности на вычислитель для определения информации точного положения.
Дополнительные варианты осуществления обеспечивают способ функционирования сети беспроводной связи. Способ содержит функционирование пользовательского оборудования в сети беспроводной связи и содержит функционирование первой базовой станции и функционирование второй базовой станции в соответствии с вариантами осуществления, описанными в настоящем документе. Способ содержит функционирование первой и второй базовой станции, чтобы координированным образом использовать способ формирования диаграммы направленности для передачи первого и второго сигнала позиционирования.
Дополнительные варианты осуществления относятся к долговременному компьютерному программному продукту, содержащему считываемый компьютером носитель, хранящий инструкции, которые, при исполнении на компьютере, выполняют способы в соответствии с вариантами осуществления, описанными в настоящем документе.
Дополнительные варианты осуществления определены в зависимых пунктах формулы изобретения.
Варианты осуществления настоящего изобретения описаны в дополнительных деталях со ссылкой на прилагаемые чертежи, на которых:
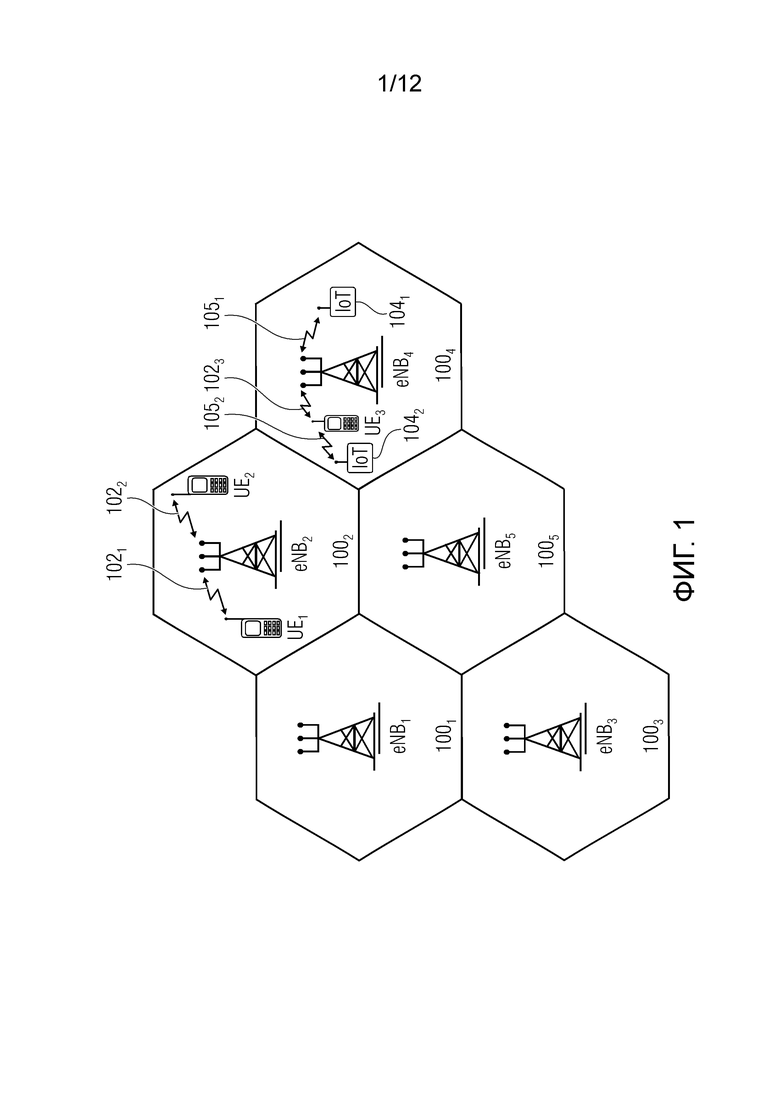
Фиг. 1 является схематичным представлением примерной сетевой инфраструктуры в соответствии с вариантом осуществления;
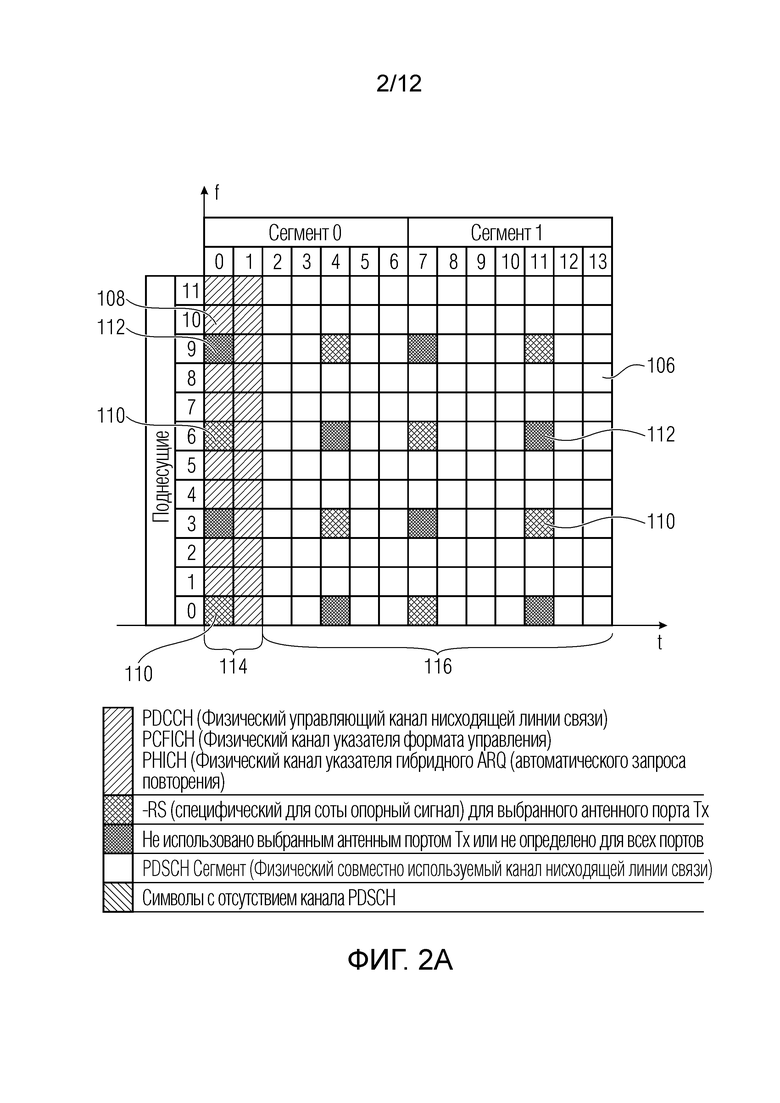
Фиг. 2a показывает примерный LTE–подкадр на основе OFDMA с двумя антенными портами для различных выбранных антенных портов Tx в соответствии с вариантом осуществления;
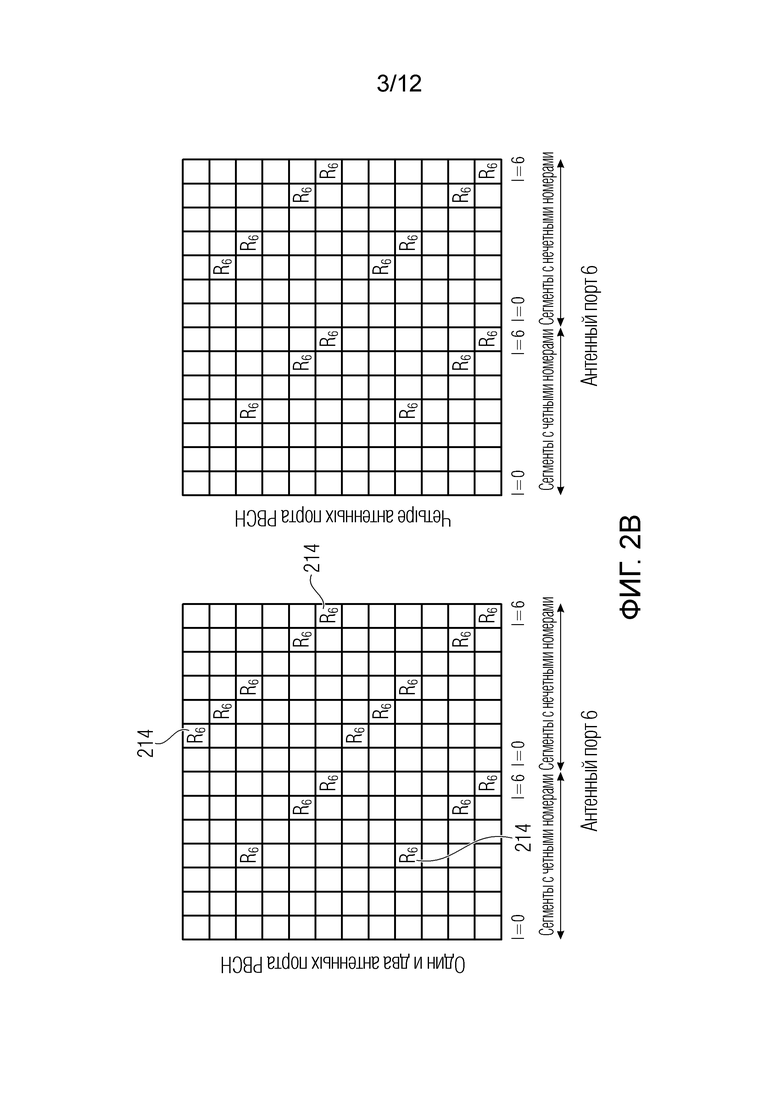
Фиг. 2b показывает схематичную диаграмму отображения последовательностей PRS;
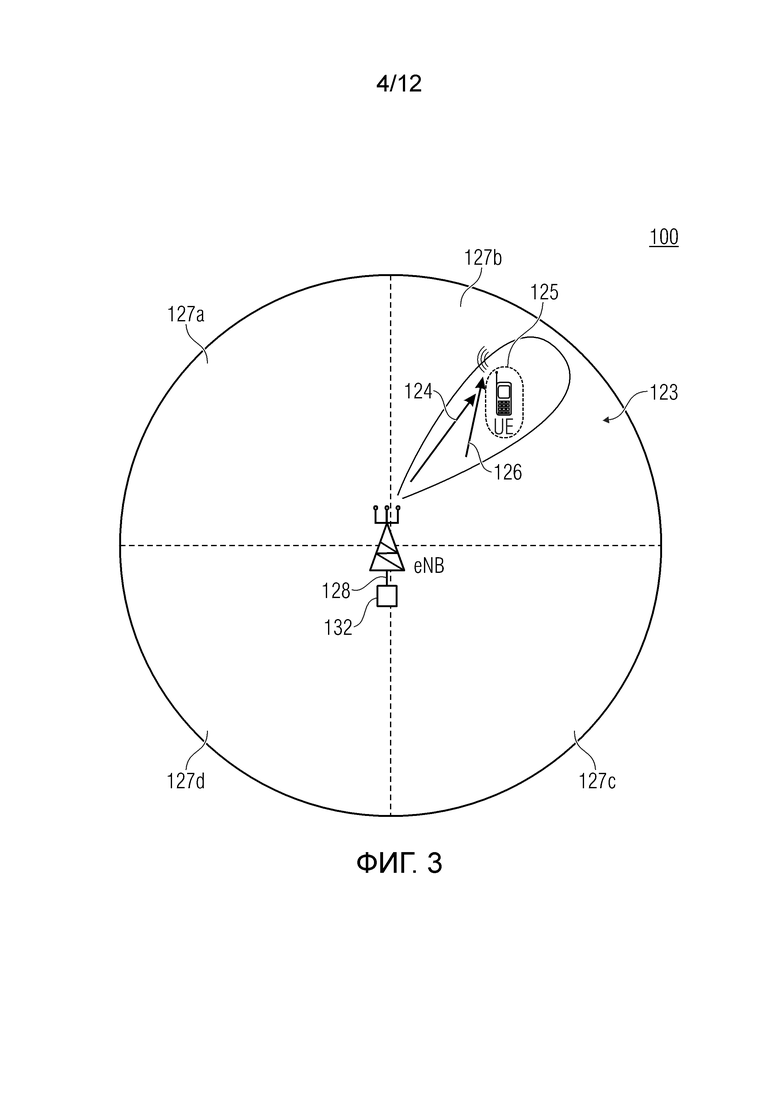
Фиг. 3 показывает блок–схему базовой станции в соответствии с вариантом осуществления;
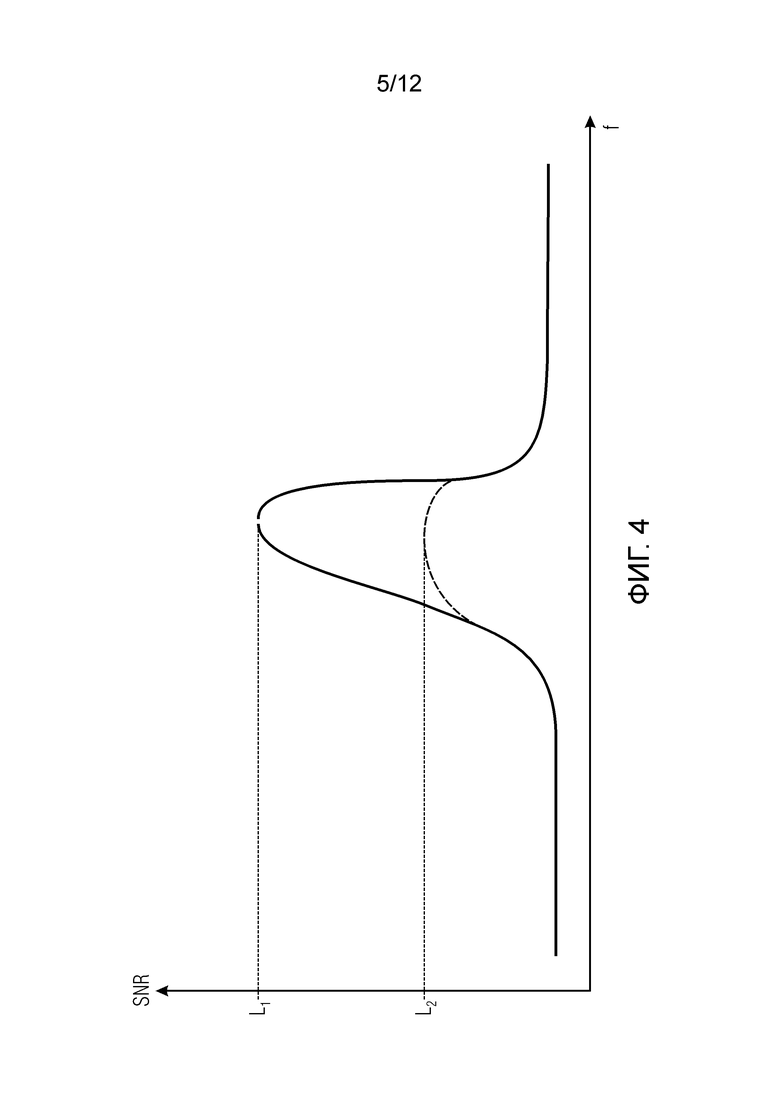
Фиг. 4 показывает схематичную диаграмму отношения сигнал–шум, полученную в вариантах осуществления;
Фиг. 5 показывает блок–схему последовательности операций способа функционирования базовой станции в соответствии с вариантом осуществления;
Фиг. 6a показывает блок–схему последовательности операций способа, который может выполняться, чтобы получать информацию грубого положения для способа согласно фиг. 5, в соответствии с вариантом осуществления;
Фиг. 6b показывает схематичную диаграмму другого способа, который может использоваться альтернативно или дополнительно к способу согласно фиг. 6a, в соответствии с вариантом осуществления;
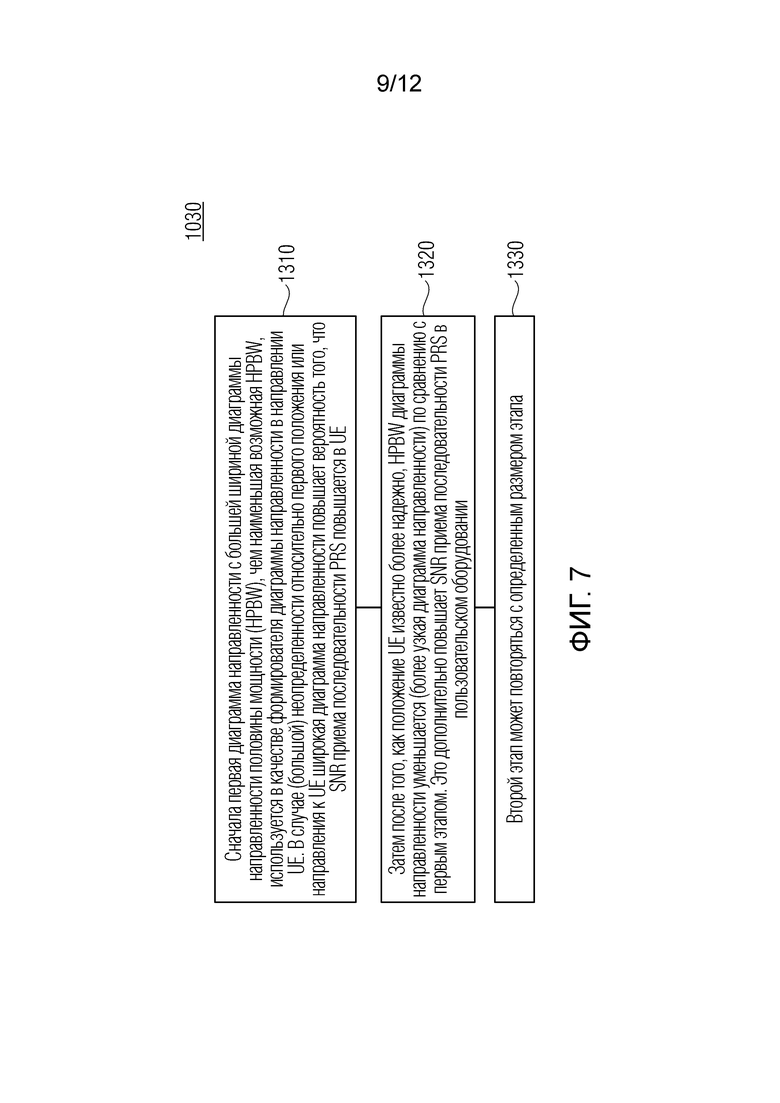
Фиг. 7 показывает схематичную диаграмму способа в соответствии с вариантом осуществления для повышения надежности;
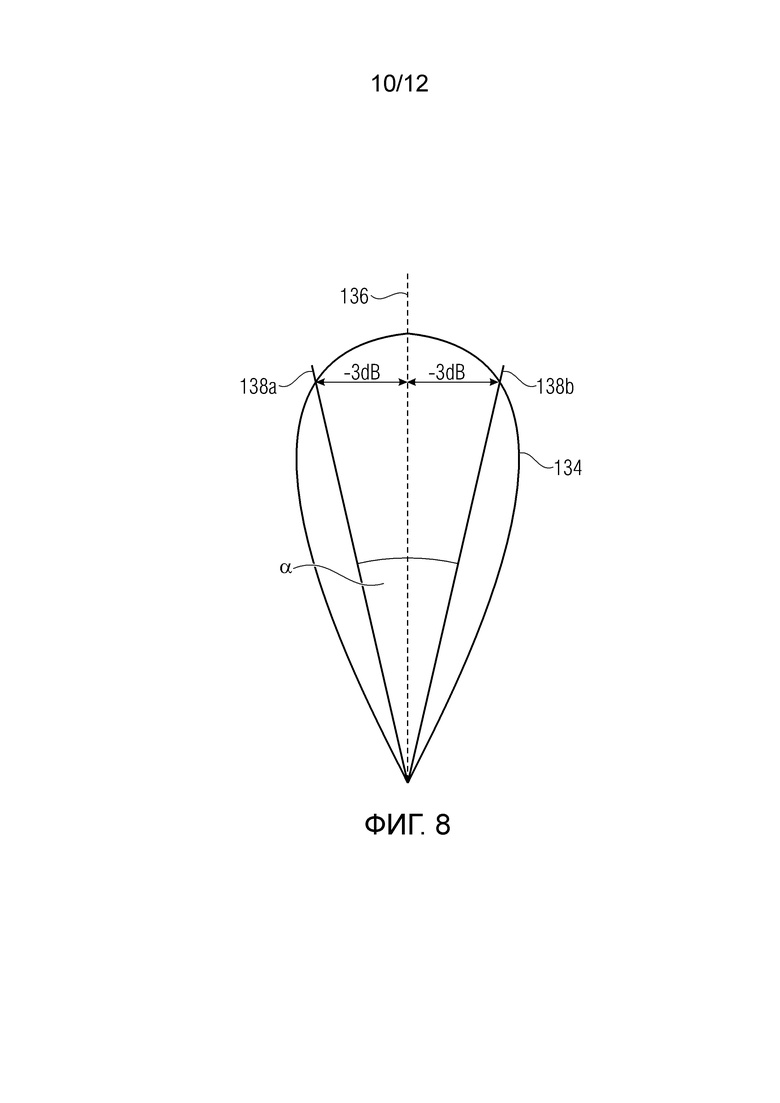
Фиг. 8 показывает схематичный вид сверху диаграммы направленности, которая может передаваться базовой станцией, в соответствии с вариантом осуществления;
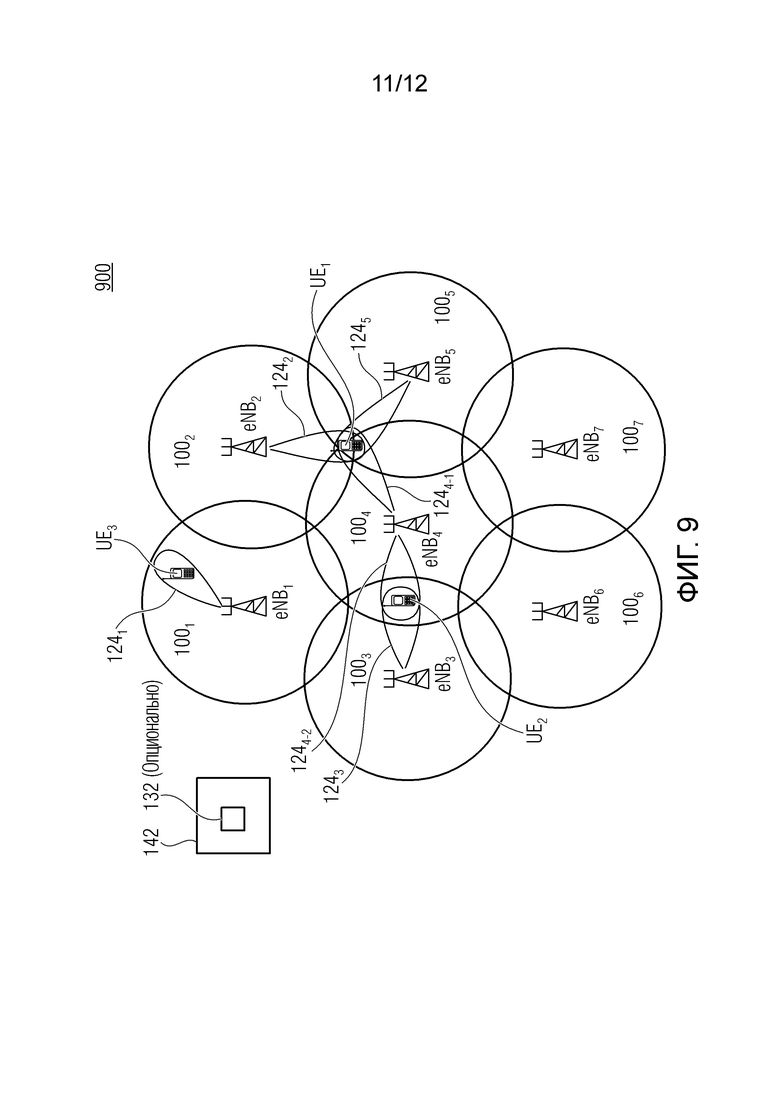
Фиг. 9 показывает блок–схему сети беспроводной связи в соответствии с вариантом осуществления; и
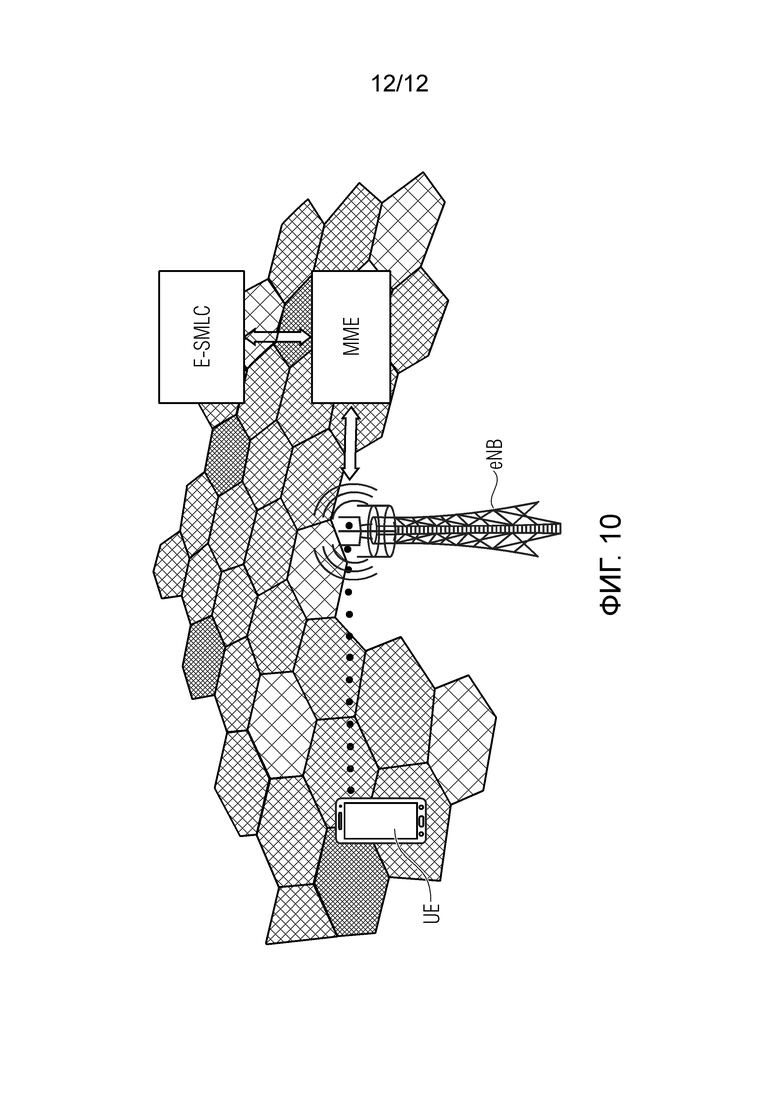
Фиг. 10 показывает схематичную диаграмму принципа позиционирования плоскости управления.
Одинаковые или эквивалентные элементы или элементы с одинаковой или эквивалентной функциональностью обозначены в следующем описании одинаковыми или эквивалентными ссылочными позициями, даже если находятся на разных чертежах.
В следующем описании, изложено множество деталей, чтобы обеспечить более четкое пояснение вариантов осуществления настоящего изобретения. Однако специалистам в данной области техники будет очевидно, что варианты осуществления настоящего изобретения могут применяться без этих конкретных деталей. В других примерах, хорошо известные структуры и устройства показаны в виде блок–схем, а не подробно, чтобы избежать неясности вариантов осуществления настоящего изобретения. К тому же, свойства других вариантов осуществления, описанных далее в настоящем документе, могут комбинироваться друг с другом, если конкретно не указано иное.
Варианты осуществления, описанные далее в настоящем документе, могут относиться к базовой станции, приводящей в действие по меньшей мере соту сети беспроводной связи в сети беспроводной связи. Далее в настоящем документе дается ссылка на беспроводные сети связи, функционирующие в соответствии с LTE (Долгосрочным развитием). Описание во взаимосвязи с вариантами осуществления, описанными в настоящем документе и относящимися к LTE, может также относиться к другим сетям мобильной связи, например, функционирующим в соответствии с 5G/новым радио или тому подобным, без ограничения. Один аспект вариантов осуществления, описанных в настоящем документе, основан на определении или по меньшей мере на воздействии на направление, в котором передаются сигналы. Это может быть получено, например, при использовании метода формирования диаграммы направленности. Выгоды использования методов формирования диаграммы направленности или других методов для воздействия на направление сигнала могут также быть получены в стандартах связи, отличных от LTE.
Хотя варианты осуществления, описанные в настоящем документе, относятся к пользовательскому оборудованию, которое функционирует в сети беспроводной связи, варианты осуществления могут также относиться к устройствам IoT. Устройства IoT могут включать в себя физические устройства, транспортные средства, здания и других объекты, имеющие встроенную в них электронику, программное обеспечение, датчики, приводы или тому подобное, а также сетевую связность, которые позволяют этим устройствам собирать данные и обмениваться данными по существующей сетевой инфраструктуре. Фиг. 1 является схематичным представлением примера такой сетевой инфраструктуры, например, системы беспроводной связи, включающей в себя множество базовых станций eNB1–eNB5, каждая из которых обслуживает конкретную область, окружающую базовую станцию, схематично представленную соответствующими сотами 1001–1005. Базовые станции обеспечены, чтобы обслуживать пользователей в пределах соты. Пользователь может представлять собой стационарное устройство или мобильное устройство. Дополнительно, доступ к системе беспроводной связи может осуществляться посредством устройств IoT, которые соединяются с базовой станцией или с пользователем. Фиг. 1 показывает примерный вид только пяти сот, однако, система беспроводной связи может включать в себя больше таких сот. Фиг. 1 показывает двух пользователей UE1 и UE2, также упоминаемых как пользовательское оборудование (UE), которые находятся в соте 1002 и которые обслуживаются базовой станцией eNB2. Другой пользователь UE3 показан в соте 1004, которая обслуживается базовой станцией eNB4. Стрелки 102, 1022 и 1023 схематично представляют соединения восходящей линии связи/нисходящей линии связи для передачи данных от пользователя UE1, UE2 и UE3 на базовые станции eNB2, eNB4 или для передачи данных от базовых станций eNB2, eNB4 к пользователям UE1, UE2, UE3. Дополнительно, фиг. 1 показывает два устройства 1041 и 1042 IoT в соте 1004, которые могут представлять собой стационарные или мобильные устройства. Устройство 1041 IoT осуществляет доступ к системе беспроводной связи через базовую станцию eNB4, чтобы принимать и передавать данные, как схематично представлено стрелкой 1051. Устройство 1042 IoT осуществляет доступ к системе беспроводной связи через пользователя UE3, как схематично представлено стрелкой 1052. По сравнению с UE, устройство IoT может осуществлять доступ к каналу, например, менее часто и/или с использованием меньшей ширины полосы, но может иным образом представлять собой дополнительный сетевой узел ввиду запрашивания доступа к каналу или тому подобного.
Система беспроводной связи может представлять собой любую одно–тоновую или многочастотную (с множеством несущих) систему на основе мультиплексирования с частотным разделением, например, систему мультиплексирования с ортогональным частотным разделением (OFDM), систему множественного доступа с ортогональным частотным разделением (OFDMA), определяемую стандартом LTE, или с каким–либо другим сигналом на основе IFFT с или без CP, например, DFT–s–OFDM. Могут использоваться другие волновые формы сигнала, такие как неортогональные волновые формы для множественного доступа, например, множество несущих с набором фильтров (FBMC).
Стандартные устройства LTE, такие как пользователи UE1, UE2, UE3, функционируют в пределах первой ширины полосы, а устройства 1041 и 1042 IoT могут функционировать в пределах второй ширины полосы, которая является более узкой, чем первая ширина полосы. Вторая ширина полосы может быть определена в соответствии с расширением NB–IoT стандарта LTE Rel. 13, также упоминаемого далее как NB–IoT. Система беспроводной связи, работающая в соответствии со стандартом LTE, может иметь системную ширину полосы 1,4 МГц, 3,0 МГц, 5 МГц, 10 МГц, 15 МГц, 20 МГц или агрегированную системную ширину полосы, состоящую из любой их комбинации, и ширина полосы в соответствии с расширением NB–IoT стандарта LTE Rel. 13 может быть около 200 кГц.
Система OFDMA для передачи данных может включать в себя сетку физических ресурсов на основе OFDMA, которая содержит множество блоков физических ресурсов (PRB), каждый из которых определен 12 поднесущими посредством 7 символов OFDM и включает в себя набор ресурсных элементов, на которые отображаются различные физические каналы и физические сигналы. Ресурсный элемент состоит из одного символа во временной области и одной поднесущей в частотной области. Например, в соответствии со стандартом LTE, системная ширина полосы 1,4 МГц включает в себя 6 PRB, и ширина полосы 200 кГц, в соответствии с расширением NB–IoT стандарта LTE Rel. 13, включает в себя 1 PRB. В соответствии с LTE и NB–IoT, физические каналы могут включать в себя физический совместно используемый канал нисходящей линии связи (PDSCH), включающий в себя специфические для пользователя данные, также упоминаемые как данные полезной нагрузки нисходящей линии связи, физический широковещательный канал (PBCH), включающий в себя, например, блок основной информации (MIB) или блок системной информации (SIB), физический управляющий канал нисходящей линии связи (PDCCH), включающий в себя, например, информацию управления нисходящей линии связи (DCI) и т.д. Физические сигналы могут содержать опорные сигналы (RS), сигналы синхронизации и тому подобное. Сетка ресурсов LTE содержит кадр 10 мс во временной области, имеющий определенную ширину полосы в частотной области, например, 1,4 МГц. Кадр имеет 10 подкадров длиной 1 мс, и каждый подкадр включает в себя два сегмента из 6 или 7 символов OFDM в зависимости от длины циклического префикса (CP).
Фиг. 2a показывает примерный LTE–подкадр на основе OFDMA с двумя антенными портами для различных выбранных антенных портов Tx. Подкадр включает в себя два блока ресурсов (RB), каждый из которых состоит из одного сегмента подкадра и 12 поднесущих в частотной области. Поднесущие в частотной области показаны как поднесущая 0 – поднесущая 11, а во временной области каждый сегмент включает в себя 7 символов OFDM, например, в сегменте 0 символы OFDM от 0 до 6 и в сегменте 1 символы OFDM от 7 до 13. Белые ячейки 106 представляют ресурсные элементы, распределенные для PDSCH, включающему в себя полезную нагрузку или пользовательские данные, также называемые областью полезной нагрузки. Один или несколько ресурсных элементов PDSCH может использоваться для передачи опорных сигналов позиционирования (PRS). PRS может использоваться, чтобы определять положение пользовательского оборудования и/или устройства IoT. Ресурсные элементы для физических управляющих каналов (включая данные, не относящиеся к полезной нагрузке или к не–пользовательским данным), также относимые к области управления, представлены заштрихованными ячейками 108. В соответствии с примерами, ресурсные элементы 108 могут быть распределены PDCCH, физическому каналу указателя формата управления (PCFICH) и физическому каналу указателя гибридного ARQ (PHICH). Ячейки 110 с перекрестной штриховкой представляют ресурсные элементы, которые распределены для RS, который может использоваться для оценки канала. Черные ячейки 112 представляют неиспользуемые ресурсы в текущем антенном порте, которые могут соответствовать RS в других антенных портах. Ресурсные элементы 108, 110, 112, распределенные физическим управляющим каналам и физическим опорным сигналам, распределены неравномерно по времени. Более конкретно, в сегменте 0 подкадра, ресурсные элементы, ассоциированные с символом 0 и символом 1, распределены физическим управляющим каналам или физическим опорным сигналам, никакие из ресурсных элементов в символах 0 и 1 не распределены данным полезной нагрузки. Ресурсные элементы, ассоциированные с символом 4 в сегменте 0, а также ресурсные элементы, ассоциированные с символами 7 и 11 в сегменте 1 подкадра, распределены частично физическим управляющим каналам или физическим опорным сигналам. Белые ресурсные элементы, показанные на фиг. 2a, могут включать в себя символы, ассоциированные с данными полезной нагрузки или пользовательскими данными, и в сегменте 0 для символов 2, 3, 5 и 6 все ресурсные элементы 106 могут быть распределены данным полезной нагрузки, в то время как меньше ресурсных элементов 106 распределено данным полезной нагрузки в символе 4 сегмента 0, и никакой ресурсный элемент не распределен данным полезной нагрузки в символах 0 и 1. В сегменте 1 ресурсные элементы, ассоциированные с символами 8, 9, 10, 12 и 13, все распределены данным полезной нагрузки, в то время как для символов 7 и 11 меньше ресурсных элементов распределено данным полезной нагрузки.
Фиг. 2b показывает схематичную диаграмму отображения последовательностей PRS, как описано в [6]. Опорные сигналы позиционирования подлежат передаче в блоках ресурсов в подкадрах нисходящей линии связи, которые сконфигурированы для передачи опорного сигнала позиционирования. Если как нормальные подкадры, так и подкадры MBSFN (одночастотной сети многоадресной/широковещательной передачи) сконфигурированы как подкадры позиционирования в пределах соты, символы OFDM в подкадре MBSFN, сконфигурированном для передачи опорного сигнала позиционирования, могут использовать тот же самый циклический префикс, что и используемый для подкадра #0. Если только подкадры MBSFN сконфигурированы как подкадры позиционирования в пределах соты, символы OFDM, сконфигурированные для опорных сигналов позиционирования в области MBSFN этих подкадров, могут использовать расширенную длину циклического префикса. В подкадре, сконфигурированном для передачи опорного сигнала позиционирования, начальные положения символов OFDM, сконфигурированных для передачи опорного сигнала позиционирования, могут быть идентичными начальным положениям символов OFDM в подкадре, в котором все символы OFDM имеют ту же самую длину циклического префикса, что и символы OFDM, сконфигурированные для передачи опорного сигнала позиционирования. Опорные сигналы позиционирования могут передаваться на антенном порте 6. Опорные сигналы позиционирования могут отображаться на ресурсные элементы, отличные от (k, l), распределенных для PBCH, PSS или SSS, независимо от их антенного порта p. Опорные сигналы позиционирования могут быть определены, например, для конкретного диапазона частот, такого как f±15 кГц вокруг центральной частоты. На левой стороне, PRS отображены для одного и двух антенных портов PBCH, а на правой стороне используются четыре антенных порта PBCH. Сегменты 214 для передачи PRS маркированы при помощи R6 и представлены для сегментов с четными номерами и сегментов с нечетными номерами. Ширина полосы для опорных сигналов позиционирования может быть сконфигурирована посредством более высоких уровней.
Фиг. 3 показывает блок–схему базовой станции eNB в соответствии с вариантом осуществления. eNB сконфигурирована, чтобы управлять сотой 100 сети беспроводной связи, например, одной из сот 1001–1005 на фиг. 1. Базовая станция eNB сконфигурирована, чтобы использовать информацию 123 грубого положения, относящуюся к пользовательскому оборудованию UE. Пользовательское оборудование может быть размещено в соте 100 сети беспроводной связи и может приводиться в действие базовой станцией eNB. Как будет описано ниже более подробно, возможно, что UE размещено вне соты 100 и/или приводится в действие другой базовой станцией.
Информация грубого положения может содержать или может представлять собой информацию о грубом местоположении или грубом положении 123 UE в соте 100 сети беспроводной связи, которое является грубым в отношении пространственного разрешения и/или разрешения во времени. Например, информация грубого положения может содержать информацию о секторе 127a–d соты 100, в которой пользовательское оборудование размещено или предполагается, что размещено. Она может включать в себя точную информацию, указывающую грубое положение 123, причем точная информация, указанное грубое положение 123, соответственно, содержат элемент неопределенности. Элемент неопределенности может представлять собой, например, положение UE по координате, такой как x или y в пределах диапазона допусков. Диапазон допусков может составлять, например, по меньшей мере 500 м, по меньшей мере 100 м или по меньшей мере 10 м. Альтернативно или дополнительно, информация грубого положения может представлять собой информацию о том, что ожидается, что UE находится в одном из множества секторов 127a–127d соты 100, таком как сектор 127b. Альтернативно или дополнительно, информация грубого положения может представлять собой информацию положения, которая была определена ранее, и/или может представлять собой область в пределах соты 100 или в пределах сети беспроводной связи, которая содержит ранее известное положение UE в пределах диапазона допусков. Диапазон допусков может представлять собой, например, минимальную, максимальную или среднюю скорость, умноженную на временной интервал с момента времени, когда положение было известным. В общих терминах, информация 123 грубого положения может указывать секцию или область в пределах соты 100 сети беспроводной связи, в которой находится UE.
Базовая станция может быть сконфигурирована, чтобы по меньшей мере поддерживать локализацию UE. Например, UE или любой другой сетевой узел может запускать или инициировать локализацию UE. При запуске посредством UE, приложение UE может требовать точной локализации UE. Другие услуги UE, такие как глобальные спутниковые системы навигации, например, GPS, Galileo или Glonass, могут быть неточными или недоступными. На основе этого, UE может запросить сеть определить свое положение. Альтернативно, сеть может запустить определение положения UE, например, в сценарии чрезвычайной ситуации.
Для определения точного положения UE, базовая станция сконфигурирована, чтобы передавать сигнал 124 позиционирования на UE. Сигнал позиционирования может представлять собой, например, PRS. Альтернативно, сигнал 124 позиционирования может представлять собой другой сигнал, позволяющий пользовательскому оборудованию определять параметры приема. В частности, стандарты связи, отличные от LTE, могут называть сигналы, аналогичные PRS или по–другому обеспечивающие аналогичную функцию. Например, базовая станция может быть сконфигурирована, чтобы передавать сигнал 124 позиционирования в совместно используемом канале соты 100 сети беспроводной связи, например, канале PDSCH. Базовая станция eNB сконфигурирована, чтобы направлять сигнал 124 позиционирования в направлении грубого положения 123. Например, eNB может использовать метод формирования диаграммы направленности или любой другой метод, который обеспечивает возможность передачи сигнала 124 позиционирования в первом направлении с первой, более высокой мощностью сигнала по сравнению со вторым направлением, в котором сигнал передается с более низкой мощностью сигнала. Например, eNB может содержать множество антенн, причем каждая антенна сконфигурирована, чтобы обслуживать сектор 127a–127d соты 100. eNB может быть сконфигурирована, чтобы уменьшать мощность сигнала или даже деактивировать антенны, обслуживающие секторы или область в соте 100, в которой не находится пользовательское оборудование. Напротив, eNB может быть сконфигурирована, чтобы активировать или использовать антенны, обслуживающие область или сектор, в котором располагается пользовательское оборудование, т.е. eNB использует информацию грубого положения. При использовании метода формирования диаграммы направленности, eNB может конфигурироваться, чтобы направлять сигнал 124 позиционирования в некоторое место в пределах соты 100, т.е., помимо угла передачи, можно оказывать влияние на дальность передачи сигнала позиционирования.
При использовании метода формирования диаграммы направленности или тому подобного, eNB может быть сконфигурирована, чтобы использовать информацию грубого положения, чтобы безопасно или по меньшей мере с низкой частотой ошибок ниже 15%, ниже 10% или ниже 5% достигать пользовательского оборудования сигналом 124 позиционирования, т.е., частота ошибок может относиться к вероятности успешной передачи, а не к частоте ошибочных битов.
Базовая станция сконфигурирована, чтобы ожидать и/или принимать ответный сигнал 126 от пользовательского оборудования, причем UE может передавать ответный сигнал на базовую станцию и/или на другой сетевой узел, такой как сервер определения местоположения. Как будет описано более подробно в связи с фиг. 10, позиционирование может выполняться на плоскости управления, т.е. ответный сигнал принимается базовой станцией, и/или на пользовательской плоскости. Далее, в соответствии с вариантами осуществления, базовая станция сконфигурирована, чтобы принимать и/или оценивать ответный сигнал. Один аспект вариантов осуществления, описанных в настоящем документе, состоит в использовании формирования диаграммы направленности для передачи сигналов позиционирования. Этот аспект является независимым от узла, который принимает и/или оценивает соответствующий ответный сигнал. Таким образом, без ограничения, UE может передавать ответный сигнал на другой узел, такой как сервер определения местоположения.
Ответный сигнал 126 может содержать информацию, указывающую параметр приема сигнала 124 позиционирования в пользовательском оборудовании. Параметр может представлять собой, например, отношение сигнал–шум (SNR), отношение сигнал–помеха плюс шум (SINR) для одного или нескольких путей, по которым был принят сигнал 124 позиционирования, для времени прихода (ToA) сигнала 124 позиционирования, разности времени прихода (TDoA) и/или направления прихода (DoA) сигнала 124 позиционирования. Как будет описано ниже более подробно, множество базовых станций может передавать сигналы позиционирования, которые поступают в пользовательское оборудование в другие моменты времени. Пользовательское оборудование может определять наблюдаемую разность времени прихода (OTDoA) между приходами разных сигналов позиционирования и может указывать эти разности времени или другие параметры путем передачи ответного сигнала 126. Таким образом, базовая станция может быть сконфигурирована, чтобы определять направление прихода на основе сигнала, принятого от пользовательского оборудования, и причем базовая станция может быть сконфигурирована, чтобы определять информацию грубого положения на основе направления прихода.
Базовая станция может быть сконфигурирована, чтобы извлекать информацию 128, указывающую параметр или являющуюся параметром приема, и предоставлять параметр приема на вычислитель 132. Вычислитель 132 может быть сконфигурирован, чтобы определять точное положение 125 пользовательского оборудования с использованием параметра приема. Точное положение 125 может быть более точным по сравнению с грубым положением 123. Точность соответствующей информации положения может относиться к диапазону пространственных допусков относительно реального или действительного положения пользовательского оборудования и/или может относиться к возрасту информации положения. Информация точного положения может быть более точной по меньшей мере на 5%, по меньшей мере на 10% или по меньшей мере на 20% по сравнению с информацией 123 грубого положения. Например, угол раскрытия возможного направления пользовательского оборудования относительно eNB, расстояние до UE относительно eNB, величина диапазона допусков вокруг положения UE, диапазон допусков, на который влияет элемент неопределенности, расширение сектора в пределах соты 100 или тому подобное могут предполагаться с первым значением для информации грубого положения и могут определяться более точно при получении информации точного положения. Информация точного положения может содержать координату и/или направление к пользовательскому оборудованию и/или само положение пользовательского оборудования. Могут существовать сценарии, в которых UE может принимать последовательность PRS с низкими потерями канала, чтобы иметь достаточно высокое SNR, даже при передаче сигнала позиционирования без формирования диаграммы направленности или всенаправленным образом. Примерный сценарий может представлять собой сценарий свободного поля с малым расстоянием между eNB и UE. Это может приводить к постоянному SNR и/или к низкому или даже к нулевому улучшению точности при направлении сигнала позиционирования. В таком случае информация точного положения может иметь ту же самую точность, что и информация грубого положения, но на достаточно высоком уровне.
Контроллер 132 может быть размещен на, в или вблизи eNB, т.е., он может быть частью eNB. Альтернативно, контроллер 132 может быть частью другого сетевого узла, такого как сервер локализации, обеспечивающий данные локализации сетевого узла в пределах сети беспроводной связи.
Базовая станция eNB может быть сконфигурирована, чтобы принимать информацию управления от пользовательского оборудования UE, например, соответствующий сигнал. Базовая станция может быть сконфигурирована, чтобы направлять передачу сигнала позиционирования к пользовательскому оборудованию в ответ на информацию управления, чтобы реализовывать первую диаграмму направленности передачи. Базовая станция eNB может быть сконфигурирована, чтобы передавать сигнал 124 позиционирования в соответствии с другой диаграммой направленности передачи при отсутствии информации управления. Таким образом, базовая станция eNB может запускаться, чтобы реализовывать направление сигнала 124 позиционирования в ответ на информацию управления. Информация управления может быть принята от пользовательского оборудования, от дополнительной базовой станции и/или от другого объекта сети, например, сервера определения местоположения. Другая диаграмма направленности может представлять собой, например, всенаправленную диаграмму направленности. Это может пониматься как возможный вариант для направления сигнала позиционирования, например, в случае чрезвычайной ситуации или других сценариев, требующих приоритетности.
Ответный сигнал 126, передаваемый посредством UE, может быть прозрачным для узла приема, такого как сервер определения местоположения или базовая станция, т.е., структура сигнала может быть неизменной по сравнению с другими ответными сигналами. Различие может быть обнаружено в UE, принимающем сигнал позиционирования, которое принимает сигнал позиционирования и/или принимает сигнал позиционирования с лучшим качеством по сравнению со сценариями, в которых оно пропустило бы прием или приняло бы сигнал позиционирования с низким качеством.
Другими словами, чтобы повысить SNR приема последовательности PRS в конкретном UE, описано применение вектора формирования диаграммы направленности в базовой станции для передачи PRS. Это может быть реализовано с использованием аналогового и/или цифрового формирования диаграммы направленности. Сообщенные сигналы PRS могут быть приняты в UE, и оно выполняет для множества путей LoS/NLoS от обслуживающей базовой станции и окружающих eNB измерения времени прихода (ToA), разности времен прихода (TDoA) и оценки направления прихода (DoA), причем измерения DoA могут быть реализованы для множества антенн UE. Вычисление вектора формирования диаграммы направленности может быть основано на оцененном отклике канала, ассоциированном с UE, и может применяться для обслуживающей базовой станции. Вычисление вектора формирования диаграммы направленности может быть основано на направлении к пользовательскому оборудованию или положении пользовательского оборудования. Например, может использоваться ранее полученная информация местоположения. Векторы формирования диаграммы направленности могут применяться в обслуживающих и/других окружающих базовых станциях. На основе качества или потерь на пути распространения из множества путей Los/NLoS, базовая станция может быть сконфигурирована, чтобы определять или оценивать направление пути LoS между UE и базовой станцией, и может формировать диаграмму направленности так, чтобы содержать путь LoS. Например, направление, которое доставляет самую высокую амплитуду сигнала от UE, может рассматриваться как путь LoS. Дополнительно, базовая станция может быть сконфигурирована, чтобы формировать диаграмму направленности настолько узкую, чтобы исключать некоторые, большинство или предпочтительно все пути NLoS. Это может обеспечивать высокое качество передачи. Таким образом, базовая станция может быть сконфигурирована, чтобы определять путь по линии видимости между пользовательским оборудованием и базовой станцией. Базовая станция может быть сконфигурирована, чтобы передавать сигнал позиционирования вдоль направления пути по линии видимости, в то же время исключая направление пути не по линии видимости.
Фиг. 4 показывает схематичную диаграмму отношения сигнал–шум SNR, показанного по оси ординат, в зависимости от частоты f, показанной по оси абсцисс. Например, сигнал 124 позиционирования может содержать предопределенную последовательность, такую как последовательность PRS, из пула последовательностей. Пользовательское оборудование может, только в качестве неограничивающего примера, определять корреляцию, такую как взаимная корреляция, между принятым сигналом 124 позиционирования и возможными или ожидаемыми последовательностями. Такая корреляция может приводить к одному или нескольким пикам, причем фиг. 4 схематично иллюстрирует один пик. Прием последовательности по другим путям может приводить к большему количеству пиков.
Направляя сигнал 124 позиционирования в направлении пользовательского оборудования, можно обеспечить более высокую мощность сигнала в UE по сравнению с всенаправленной передачей. Это может приводить к SNR, имеющему уровень L1, который является более высоким по сравнению с уровнем L2, получаемым при передаче сигнала 124 позиционирования в более широкую область, например, без формирования диаграммы направленности, например, всенаправленным образом или в область, определяемую направлением или характеристикой секторной антенны, при поддержании мощности передачи. Таким образом, за счет направленности сигнала позиционирования, более высокая мощность сигнала может быть получена в пользовательском оборудовании, обеспечивая возможность лучшего сигнала в пользовательском оборудовании, который имеет более высокий SNR или SINR. Этот лучший сигнал может обеспечивать более точное определение характеристики передачи от базовой станции к пользовательскому оборудованию и/или может обеспечивать качество сигнала или уровень мощности сигнала, который позволяет надлежащим образом определять параметр передачи. Это может иметь место в сценарии, где пользовательское оборудование является скрытым или находится на большом расстоянии и даже не распознало бы сигнал позиционирования, переданный без формирования диаграммы направленности или по крайней мере с низким SNR или SINR.
Другими словами, варианты осуществления, описанные в настоящем документе, могут улучшать оценку положения для конкретного пользовательского оборудования в сети мобильной связи, такой как система LTE, на основе измерений наблюдаемой разности времен прихода (OTDoA) нисходящей линии связи. Измерение OTDoA нисходящей линии связи основано на последовательностях PRS, передаваемых посредством eNB и принимаемых посредством UE. Принятое SNR последовательности PRS повышается с использованием специфических для UE последовательностей PRS сформированной диаграммы направленности. Более того, так называемый эффективный канал сформированной диаграммы направленности может демонстрировать меньше компонентов путей зеркального отражения (многопутевых компонентов) (по линии видимости/не по линии видимости; LOS/NLOS) по сравнению с многопутевым каналом без формирования диаграммы направленности. Как следствие, функция взаимной корреляции PRS представляет только один пик или, если разрешаются, небольшое число пиков, что значительно упрощает оценку ToA/TDoA в UE.
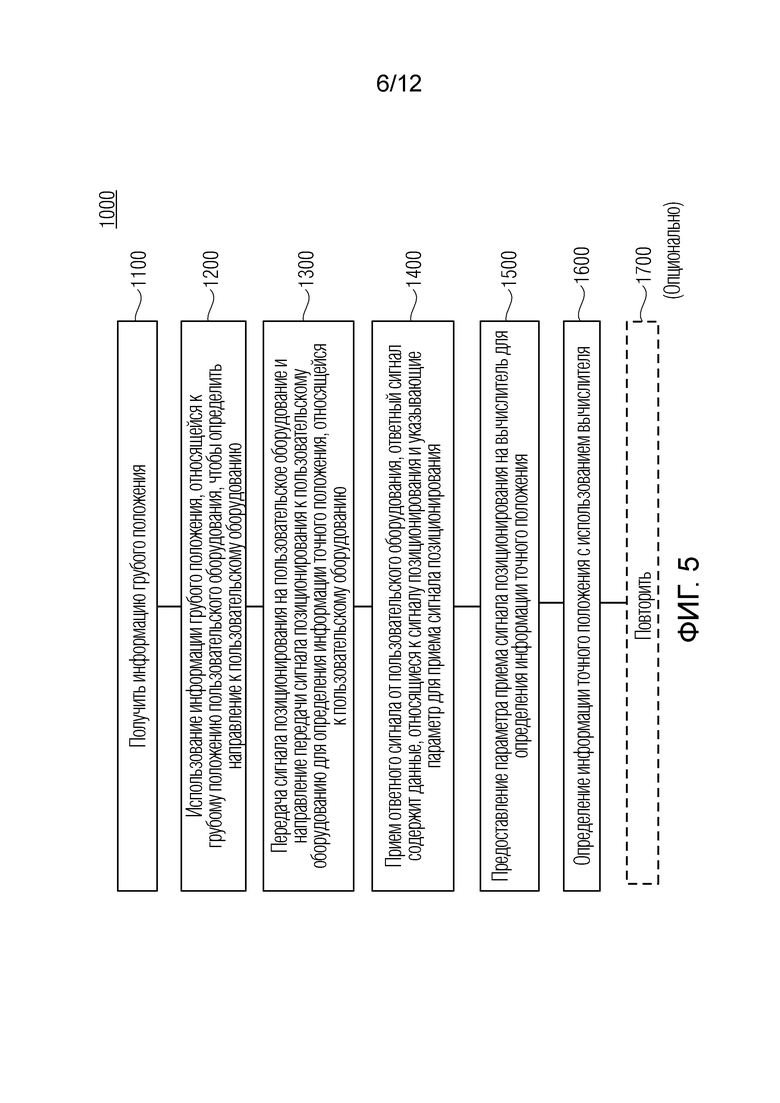
Фиг. 5 показывает блок–схему последовательности операций способа 1000 функционирования базовой станции, управляющей сотой сети беспроводной связи в сети беспроводной связи в соответствии с вариантом осуществления.
Способ содержит этап 1100, на котором получают информацию грубого положения, относящуюся к грубому положению пользовательского оборудования, которая может указывать грубое положение 123.
На этапе 1200 информация грубого положения используется, чтобы определять направление к пользовательскому оборудованию. Направление может представлять собой абсолютное значение или может представлять собой относительное значение или вектор от базовой станции. Направление может представлять собой значение или параметр, который указывает направление, вдоль которого передается сигнал позиционирования с более высокой мощностью сигнала по сравнению с другими направлениями. Например, базовая станция может принимать вектор или направление от сервера определения местоположения или другой базовой станции. Вектор может указывать направление от базовой станции к грубому положению UE. Базовая станция может затем определять направление путем определения характеристик передачи своих антенн, чтобы направить сигнал позиционирования вдоль принятого вектора.
Другими словами, обслуживающая базовая станция вычисляет вектор формирования диаграммы направленности, подлежащий использованию для сигнала PRS, перед передачей и основываясь на информации положения или угла (направления прихода) из предыдущего этапа 1100. Цель создания вектора формирования диаграммы направленности может состоять в том, чтобы максимизировать SNR приема сигнала PRS в целевом UE. Вторая цель может представлять собой минимизацию помех другим UE в той же самой соте или ближних сотах. Вычисление вектора формирования диаграммы направленности может быть основано на геометрии антенн и отклике антенн eNB, в ассоциации с направлением к UE или его положением. Дополнительно, веса (весовые коэффициенты) формирования диаграммы направленности могут быть основаны на канале, направлении или положении других UE и/или других базовых станций.
На этапе 1300, сигнал позиционирования, такой как сигнал 124 позиционирования, передается на пользовательское оборудование. Передача сигнала позиционирования направлена к пользовательскому оборудованию, т.е. вдоль направления к пользовательскому оборудованию, для определения информации точного положения, относящейся к пользовательскому оборудованию, на основе приема ответного сигнала в ответ на сигнал позиционирования.
На этапе 1400, ответный сигнал принимается от пользовательского оборудования. Ответный сигнал содержит данные, относящиеся к сигналу позиционирования и указывающие параметр приема сигнала позиционирования.
На этапе 1500, параметр приема предоставляется на вычислитель, чтобы обеспечить возможность определения информации точного положения, например, на вычислитель 132.
На этапе 1600, информация точного положения определяется с использованием вычислителя. Вычислитель может представлять собой, например, центральный процессор (CPU), микроконтроллер, специализированную интегральную схему (ASIC) или любое другое устройство, программируемое аппаратными средствами или программным обеспечением, чтобы исполнять этапы для определения информации точного положения.
Опциональный этап 1700 может содержать повторение способа 1000, т.е. одного или нескольких этапов 1100, 1200, 1300, 1400, 1500 и/или 1600. Например, определенная информация точного положения, определенная на этапе 1600, может использоваться в качестве информации грубого положения во время повторения способа 1000.
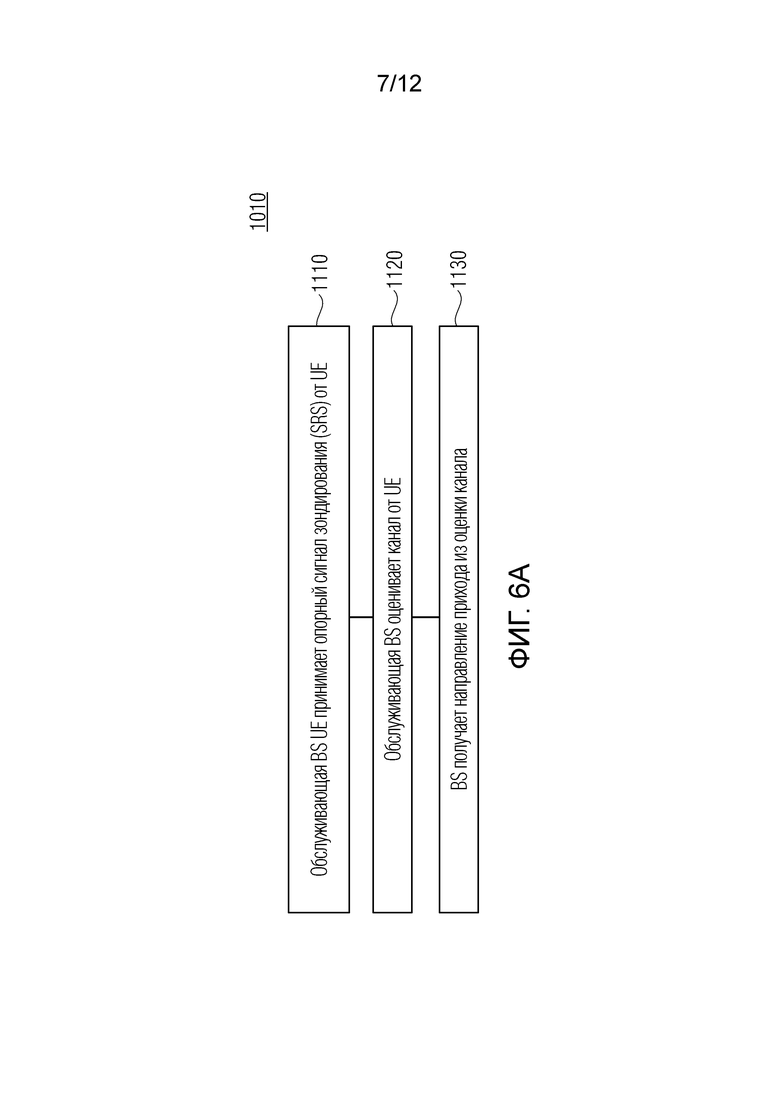
Фиг. 6a показывает блок–схему последовательности операций способа 1010, который может выполняться, чтобы получать информацию грубого положения на этапе 1100. На этапе 1110, обслуживающая базовая станция пользовательского оборудования может принимать так называемый опорный сигнал зондирования (SRS) от пользовательского оборудования. Альтернативно, базовая станция может принимать любой другой подходящий сигнал, который может обеспечивать возможность оценки канала в базовой станции.
На этапе 1120, обслуживающая базовая станция может оценивать канал и/или каналы от пользовательского оборудования с использованием принятого SRS. Это может включать в себя пути по линии видимости и/или пути не по линии видимости.
На этапе 1130, базовая станция может получать направление прихода из оценки канала. Базовая станция может быть сконфигурирована, чтобы использовать направление прихода в качестве информации грубого положения, т.е. базовая станция может быть сконфигурирована, чтобы использовать информацию грубого положения в качестве направления, определенного на этапе 1200.
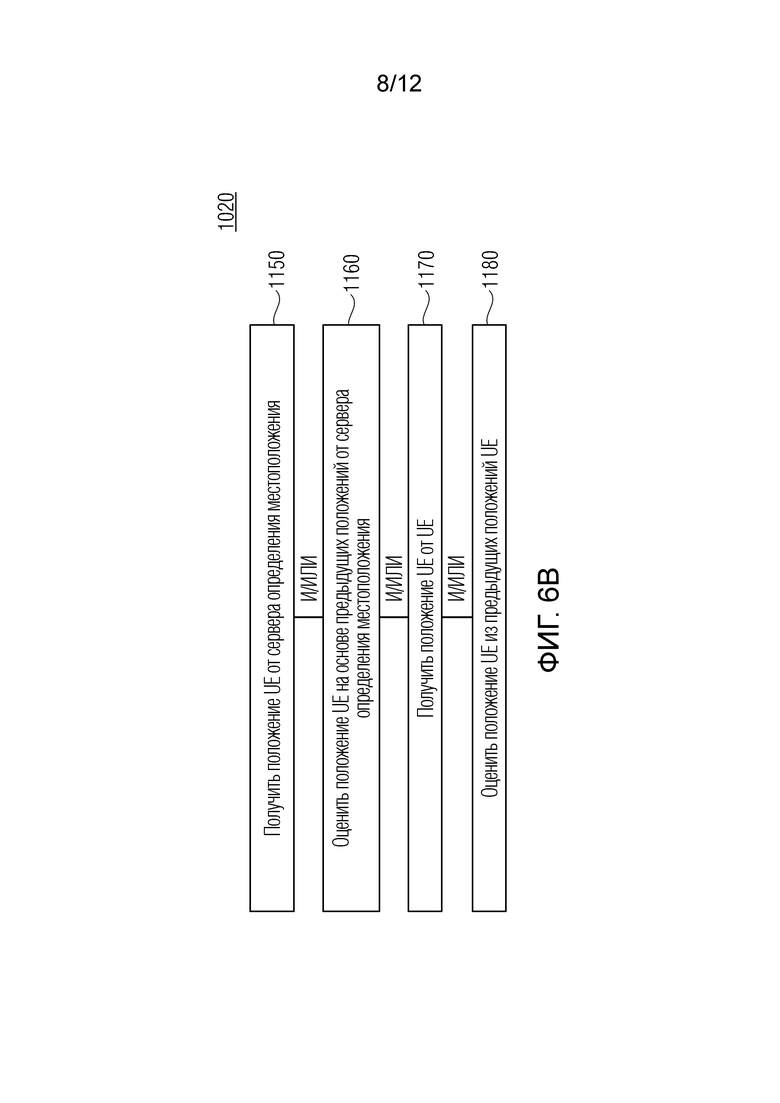
Фиг. 6b иллюстрирует схематичную диаграмму способа 1020, который может использоваться альтернативно или дополнительно к способу 1010, чтобы получать информацию грубого положения. На этапе 1150, базовая станция может получать положение пользовательского оборудования от сервера определения местоположения. Сервер определения местоположения, который доступен в сети, может представлять собой подходящий источник информации. Альтернативно или дополнительно, базовая станция может оценивать пользовательское оборудование на основе предыдущих положений, хранящихся в сервере определения местоположения и обеспеченных на этапе 1160. Например, устаревшая и поэтому, возможно, неточная, но тем не менее доступная для использования информация положения может быть получена от сервера определения местоположения.
Альтернативно или дополнительно, положение пользовательского оборудования может быть получено от пользовательского оборудования на этапе 1170. Например, пользовательское оборудование может передавать свое положение, поскольку оно обладает знанием о своем положении. Например, пользовательское оборудование может содержать устройство позиционирования, которое сконфигурировано, чтобы обеспечивать информацию о грубом положении. Например, пользовательское оборудование может определять свое положение на основе глобальной системы спутниковой навигации. Альтернативно или дополнительно, пользовательское оборудование может быть сконфигурировано, чтобы передавать свое положение на основе команды пользователя, указывающей собственное положение.
Альтернативно или дополнительно, базовая станция может быть сконфигурирована, чтобы оценивать положение пользовательского оборудования из положения, полученного ранее от пользовательского оборудования на этапе 1180, например, базовая станция может быть сконфигурирована, чтобы использовать устаревшую информацию, которая была ранее принята от пользовательского оборудования, например, во время этапа 1170.
Любой другой способ может быть реализован, чтобы получить информацию грубого положения, указывающую грубое положение пользовательского оборудования.
В случае, если много антенн доступно в базовой станции, надежность подхода может быть повышена путем применения одного или нескольких из следующих этапов способа 1030, описанных в связи с фиг. 7. Способ 1030 может быть реализован как часть этапа 1300. На этапе 1310, диаграмма направленности с большей шириной диаграммы направленности половинной мощности (HPBW), чем наименьшая возможная HPBW, используется в качестве диаграммы направленности, сформированной в направлении пользовательского оборудования. Размер HPBW может быть основан на неопределенности относительно информации грубого положения. Например, чем старее информация или чем быстрее перемещается пользовательское оборудование, тем больше может быть HPBW. Широкая диаграмма направленности может повышать вероятность того, что принятое SNR последовательности PRS повышается в пользовательском оборудовании. Это может позволить использовать первую широкую диаграмму направленности, обеспечивая возможность надежного приема посредством UE, а затем последовательно более узкую диаграмму направленности, обеспечивая возможность повышенного SNR, в то же время поддерживая надежный прием посредством UE.
На этапе 1320, который может выполняться, например, при повторении способа 1000 и/или когда положение пользовательского оборудования известно более надежно, т.е., когда получена информация точного положения, HPBW диаграммы направленности может быть уменьшена, чтобы получить более узкую диаграмму направленности по сравнению с этапом 1310. Это может позволить дополнительно повысить принятое SNR последовательности PRS в пользовательском оборудовании, в частности, когда мощность передачи поддерживается неизменной или по меньшей мере почти неизменной, т.е. та же самая или почти та же самая мощность передачи сфокусирована в более узкой диаграмме направленности.
На этапе 1330, этап 1320 может повторяться с определенным размером шага. Например, HPBW может быть уменьшена на значение, находящееся между 0,5 и 10, между 1 и 6 или между 2 и 4, такое как 3 дБ на каждом этапе, пока не будет достигнута наименьшая возможная HPBW, которая представляет собой параметр конкретных аппаратных средств. Наименьшая возможная HPBW может быть основана на или может зависеть от числа антенн и/или от апертуры решетки. Таким образом, базовая станция может быть сконфигурирована, чтобы повторять определение положения пользовательского оборудования на последовательных этапах. Базовая станция может быть сконфигурирована, чтобы использовать информацию точного положения пользовательского оборудования, определенную на первом этапе, в качестве информации грубого положения на втором этапе, следующим за первым этапом. Базовая станция может быть сконфигурирована, чтобы направлять сигнал позиционирования с использованием метода формирования диаграммы направленности. Базовая станция может быть сконфигурирована, чтобы уменьшать ширину второй диаграммы направленности, используемой на втором этапе, по сравнению с шириной первой диаграммы направленности, используемой на первом этапе.
Фиг. 8 показывает схематичный вид сверху диаграммы направленности или лепестка 134, который может передаваться посредством базовой станции, такой как eNB, проиллюстрированная на фиг. 3. Вдоль направления 136 может передаваться максимальная мощность диаграммы направленности 134. Границы 138a и 138b могут указывать область половинной мощности, т.е. –3 дБ, что соответствует 50% максимальной мощности. Угол α между границами 138a и 138b может указывать HPBW. HPBW может представлять собой угол α между точками половинной мощности диаграммы направленности 134, относительно пиковой эффективной излучаемой мощности диаграммы направленности 134. Ширина диаграммы направленности может быть выражена в качестве неограничивающего примера в градусах и/или в горизонтальной плоскости, но может также относиться к азимуту или тому подобному.
Хотя описание, обеспеченное в настоящем документе, относится к одному направлению, вдоль которого передается сигнал позиционирования, варианты осуществления обеспечивают базовую станцию, которая сконфигурирована для направления передачи сигнала позиционирования к пользовательскому оборудованию вдоль по меньшей мере первого и второго пути, т.е. вдоль первого и второго направления. Базовая станция может быть сконфигурирована, чтобы получать информацию, относящуюся по меньшей мере к первому направлению прихода первого пути и второму направлению прихода второго пути между базовой станцией и пользовательским оборудованием, и чтобы передавать сигнал позиционирования вдоль первого направления и вдоль второго направления. Со ссылкой вновь на фиг. 3, сигнал 124 позиционирования может передаваться с использованием по меньшей мере первой и второй диаграммы направленности, каждая диаграмма направленности ассоциирована с путем между базовой станцией eNB и пользовательским оборудованием UE.
Другими словами, в случае, если направление прихода (DoA) множества путей известно, например, путей по линии видимости и интенсивных путей не по линии видимости, множество диаграмм направленности может быть создано в направлении множества обнаруженных интенсивных путей. Интенсивный путь может представлять собой путь, который имеет качество канала выше определенного порога мощности и/или содержит потери пути, которые ниже, чем определенный порог потерь пути. Альтернативно, могут использоваться другие значения порога. Пути могут определяться, в качестве неограничивающего примера, во время оценки канала, например, как реакция на сигнал SRS, как описано в связи со способом 1010. Это может обеспечивать возможность измерения разности времен опорного сигнала (RSTD) для множества гипотез в пользовательском оборудовании, что может также улучшать точность позиционирования. Измерение RSTD для множества гипотез может пониматься так, что, в дополнение к наибольшему пику коррелированной последовательности PRS приема, которая сообщается, также другие пики сообщаются от пользовательского оборудования на базовую станцию. Измерение RSTD для множества гипотез описано, например, в [4]. Сообщения по множеству пиков могут представлять собой информацию, относящуюся к другим путям прихода. Базовая станция может быть сконфигурирована, чтобы определять местоположение путей на этой основе. Альтернативно, пользовательское оборудование может самостоятельно обеспечивать информацию, например, при использовании положения базовой станции.
Фиг. 9 показывает блок–схему сети беспроводной 900 связи, которая может быть основана на сети беспроводной связи, проиллюстрированной на фиг. 1, и/или может представлять собой ее расширенную версию. Сеть беспроводной 900 связи может содержать по меньшей мере первую и вторую, и возможно больше, базовые станции eNB1–eNB7, причем каждая базовая станция сконфигурирована, чтобы задействовать соту 1001–1007 сети беспроводной связи. Пользовательское оборудование UE1 может быть размещено в переходной зоне между более чем одной базовыми станциями, например, тремя базовыми станциями eNB2, eNB4 и eNB5. В переходной зоне одна из множества базовых станций может приводить в действие или обслуживать пользовательское оборудование UE1, и другие базовые станции способны передавать сигналы на UE1. В соответствии с вариантами осуществления, большинство сот окружены другими сотами или базовыми станциями, причем смежные базовые станции способны достигать больших областей соты, так что по существу в каждом положении или в каждом положении соты сигнал позиционирования может приниматься по меньшей мере от трех различных базовых станций. Альтернативно, пользовательское оборудование UE1 может быть размещено вне переходной зоны, например, при использовании способа для определения параметров передачи, который может выполняться при помощи сигнала, который принимается от одной или максимум двух базовых станций.
В дополнение к обслуживающей базовой станции eNB4 пользовательского оборудования UE1, по меньшей мере одна, предпочтительно по меньшей мере две дополнительные базовые станции eNB2 и/или eNB5 могут находиться в пределах дальности, чтобы передавать соответствующий сигнал позиционирования в направлении пользовательского оборудования UE1, т.е. сигналы 1242, 1244–1 и 1245 позиционирования могут поступать в разное время в пользовательское оборудование UE1. Хотя они поступают в разные моменты времени, времена приема сигналов 1242, 1244–1 и 1245 позиционирования могут частично перекрываться. Это может обеспечивать возможность определения TDoA, в частности, наблюдаемого TDoA нисходящей линии связи в пользовательском оборудовании UE1. Однако пользовательское оборудование UE1 может определять параметр приема для каждого из сигналов 1242, 1244–1 и 1245 позиционирования и может сообщать параметр приема на обслуживающую базовую станцию, такую как eNB4. Каждый из сигналов 1242, 1244–1 и 1245 позиционирования может содержать различную последовательность из пула последовательностей. Например, пул может содержать 4, 5 или 6 или другое число последовательностей, отличающихся друг от друга. Каждая из базовых станций может быть сконфигурирована, чтобы использовать отличающуюся последовательность, чтобы обеспечивать возможность элемента различения в UE1. UE1 может, таким образом, относить сигналы 1242, 1244–1 и 1245 позиционирования конкретной базовой станции eNB2, eNB4 и eNB5, соответственно, и может определять разницу во временах прихода и может информировать обслуживающую базовую станцию об этих значениях, т.е. она может передавать параметр приема с использованием сигнала 126.
Обслуживающая базовая станция eNB4 может быть сконфигурирована, чтобы информировать другие базовые станции в сети беспроводной 900 связи об информации грубого положения, относящейся к пользовательскому оборудованию UE1. Например, базовая станция eNB4 может осуществлять связь напрямую с другими базовыми станциями eNB2 и/или eNB5. Альтернативно или дополнительно, сервер 142 местоположения, который может опционально содержать контроллер 132, может быть сконфигурирован, чтобы осуществлять связь с базовыми станциями eNB1–eNB7. Базовая станция eNB4 может информировать сервер 142 определения местоположения о грубом положении пользовательского оборудования UE1. eNB2 и/или eNB5 может принимать информацию, относящуюся к грубому положению, от сервера 142 местоположения, т.е. каждая из базовых станций eNB2, eNB4 и eNB5 и, возможно, другие базовые станции могут обладать знанием об информации грубого положения. Базовые станции eNB2, eNB4 и eNB5 могут направлять сигнал позиционирования в направлении пользовательского оборудования UE1, т.е. базовые станции eNB2, eNB4 и eNB5 могут быть сконфигурированы, чтобы выполнять координированное формирование диаграммы направленности или координированным образом использовать метод формирования диаграммы направленности для передачи сигнала позиционирования. Хотя объяснение приведено в отношении трех базовых станций, координированное использование формирования диаграммы направленности может быть реализовано двумя, тремя, четырьмя или более базовыми станциями, передающими сигнал позиционирования в направлении к пользовательскому оборудованию UE1.
Второе пользовательское оборудование UE2 может приводиться в действие или обслуживаться в сети беспроводной связи, например, посредством eNB3, eNB4. Базовые станции eNB3 и eNB4 могут быть сконфигурированы, чтобы передавать сигналы 1243 и 1244–2 позиционирования в направлении к пользовательскому оборудованию UE2 сети беспроводной 900 связи. Сигналы 1243 и 1244–2 позиционирования могут содержать последовательности, которые отличаются друг от друга. Базовая станция eNB4 может быть сконфигурирована, чтобы использовать одну и ту же последовательность при передаче сигналов 1244–1 и 1244–2 позиционирования. Таким образом, базовая станция eNB4 может быть сконфигурирована, чтобы передавать сигнал 1244–2 позиционирования, содержащий одну и ту же последовательность из множества последовательностей, в направлении пользовательского оборудования UE2. Это может обеспечивать возможность генерирования сигналов 1244–1 и 1244–2 позиционирования как тех же самых или сопоставимых сигналов и/или передавать один и тот же сигнал вдоль направления к UE1 и вдоль направления к UE2. Вдоль других направлений, например, вне диаграмм направленности, мощность сигнала величиной максимум 50%, максимум 40% или максимум 30% может генерироваться посредством базовой станции. Например, боковой лепесток низкой мощности передачи сигнала 1244–1 позиционирования может попадать на другое UE, но по меньшей мере боковой лепесток высокой мощности или все боковые лепестки высокой мощности формируются так, чтобы исключать направление к UE2. Это может обеспечивать возможность низких взаимных помех между сотами.
Альтернативно использованию разных последовательностей, по меньшей мере одна из множества eNB может быть сконфигурирована, чтобы использовать одинаковые последовательности, так что UE1 или UE2 принимает одну и ту же последовательность от других базовых станций. Это может осуществляться разделением во времени, т.е., последовательность может приниматься от первой базовой станции, такой как eNB4, в первый момент времени или в первом временном интервале, и от второй базовой станции, такой как eNB2 или eNB5, во втором временном интервале. Альтернативно или дополнительно, такое разделение во времени, т.е., использование других временных интервалов, может также использоваться для передачи разных последовательностей. Это может также обеспечивать возможность дополнительного повышения SNR и/или SINR в UE. Это может пониматься как то, что базовая станция eNB4 опционально сконфигурирована, чтобы передавать сигнал 1344–2 позиционирования в направлении пользовательского оборудования UE2, в то же время не передавая другой сигнал позиционирования в направлении к пользовательскому оборудованию UE1.
Другими словами, ссылаясь на UE1 и/или UE2, сигналы PRS сформированной диаграммы направленности могут приниматься соответствующим UE, и оно выполняет для множества путей LoS от обслуживающей базовой станции и, возможно, окружающих базовых станций измерения времени прихода (ToA) и/или разности времен прихода (TDoA). Если пользовательское оборудование оснащено множеством антенн, UE может также оценивать направление прихода (DoA) в терминах азимутов и/или углов места путевых (многолучевых) компонентов эффективного канала сформированной диаграммы направленности, который с высокой вероятностью будет содержать несколько многолучевых компонентов, по сравнению с сигнализацией без формирования диаграммы направленности. На основе измерений, так называемые значения RSTD (разность времен опорного сигнала) и опционально соответствующие значения DoA могут быть получены для преобладающего или, опционально, нескольких интенсивных путей распространения. Оценки ToA, TDoA, которая упоминается как RSTD в LTE, и/или DoA, могут передаваться на обслуживающую базовую станцию или сервер определения местоположения. Сервер определения местоположения может применять описание режима 3D–канала, где каждый путь может быть описан посредством установленного ToA/TDoA и, возможно, углов DoA, чтобы вычислить направление к UE или непосредственно положение UE.
Другими словами, обслуживающая базовая станция может распределять направление к пользовательскому оборудованию или информацию положения UE на окружающие базовые станции, например, непосредственно или посредством сервера определения местоположения. Положение с более высокой точностью может затем быть вычислено в сервере определения местоположения. В качестве опциональной возможности, уточнение векторов формирования диаграммы направленности может осуществляться на основе улучшенной оценки положения из процедуры, которая была описана ранее. Чем точнее известно положение, тем лучший формирователь диаграммы направленности может быть спроектирован, тем более высокое SNR приема PRS может быть получено в UE, что, в свою очередь, обеспечивает возможность более точного определения положения. Дополнительный опциональный этап может определять, что другие базовые станции могут также получать положение пользователей, например, от сервера определения местоположения или UE, и/или оно распределяется обслуживающей базовой станцией или оценивается по SRS, принятому от UE. В случае, если разные последовательности PRS, например, от всех участвующих базовых станций, принимаются посредством UE, все базовые станции могут применять PRS сформированной диаграммы направленности к целевому UE, чтобы повысить принятое SNR каждой из последовательностей PRS. В настоящее время, доступно повторное использование 6, как описано в [3]. Ввиду структуры последовательностей PRS, которые не ортогональны друг к другу, может использоваться координированное формирование диаграммы направленности, чтобы дополнительно повысить SINR последовательностей PRS, принимаемых в UE. Например, во временном интервале 1, базовая станция 1 может передавать последовательности PRS сформированной диаграммы направленности, чтобы повысить SNR, в то время как другие базовые станции используют последовательности PRS сформированной диаграммы направленности, чтобы снизить SNR их сигнала в UE или, другими словами, нуль диаграммы направленности должен быть сформирован в направлении UE. Снова со ссылкой на фиг. 9, базовая станция eNB1 может обслуживать пользовательское оборудование UE3 и может быть сконфигурирована, чтобы передавать сигнал 1241 позиционирования в направлении пользовательского оборудования UE3, в то же время исключая передачу на другое пользовательское оборудование, такое как UE1 и/или UE2. В следующем временном интервале это смещается на следующую базовую станцию. В случае, если те же самые последовательности PRS используются некоторыми из базовых станций, координированное формирование диаграммы направленности базовой станцией может производиться аналогично предыдущему описанию. Например, базовая станция 1 может передавать последовательность PRS сформированной диаграммы направленности, чтобы повысить SNR, в то время как другие базовые станции могут использовать ту же самую последовательность и могут использовать последовательности PRS сформированной диаграммы направленности, чтобы снизить SNR своего сигнала в UE или, другими словами, нуль диаграммы направленности должен быть сформирован в направлении пользовательского оборудования.
Обновленное, например, более точное направление к пользовательскому оборудованию или информация положения UE может распространяться на окружающие базовые станции, на основе последовательностей PRS сформированной диаграммы направленности, используемых на предыдущем этапе.
Варианты осуществления, описанные в настоящем документе, могут относиться к SNR приема последовательностей PRS пользовательского оборудования и могут обеспечивать повышение точности локализации. Для другого пользовательского оборудования SNR может снижаться, например, когда местоположение другого пользовательского оборудования не учитывается во время формирования диаграммы направленности. Поэтому, это может использоваться, например, для экстренных вызовов. В случае экстренных вызовов, местоположение должно быть получено сотой сети, как описано в [5]. Описанные способы и/или базовые станции могут использоваться, чтобы повысить точность позиционирования, например, для экстренных вызовов. Варианты осуществления могут дополнительно или в качестве альтернативы способствовать повышению повторного использования временных, частотных и кодовых ресурсов.
Хотя некоторые варианты осуществления описаны таким образом, что базовая станция сконфигурирована, чтобы принимать ответный сигнал, такой как ответный сигнал 126, альтернативно или дополнительно, другой узел сети может быть сконфигурирован, чтобы принимать ответный сигнал, например, сервер определения местоположения, такой как сервер 142 определения местоположения. Вариант осуществления, описанный в связи с фиг. 3, может упоминаться как позиционирование плоскости управления, которое проиллюстрировано в связи с фиг. 10. При реализациях плоскости управления, наиболее часто используемых в экстренных службах, сообщения позиционирования обмениваются между сетью и UE по соединению сигнализации. В LTE, позиционирование плоскости управления обеспечивается посредством объекта администрирования мобильности (MME), который маршрутизирует сообщения LPP от E–SMLC (обслуживающего центра определения местоположения мобильных объектов) на UE с использованием сообщений переноса нисходящей линии связи NAS (уровня, не относящегося к доступу), что применимо к сценарию на фиг. 10. Позиционирование плоскости управления является быстрым, надежным и безопасным.
Ответ 126 или аналогичное сообщение, передаваемое от UE на сервер определения местоположения дополнительно или альтернативно передаче на базовую станцию, может упоминаться как позиционирование пользовательской плоскости. В таком случае некоторые или все из вычислений могут выполняться посредством сервера вычислений.
Таким образом, базовая станция может быть сконфигурирована, чтобы адаптировать сигнал позиционирования, чтобы обеспечивать возможность определения информации точного положения на основе данных, относящихся к сигналу позиционирования. Такие данные могут содержать параметр приема, т.е., данные, указывающие прием ответного сигнала в UE. Данные и/или параметр может представлять собой по меньшей мере часть ответного сигнала, который передается от UE на базовую станцию и/или на другой узел, такой как сервер определения местоположения. Определение информации точного положения может быть получено вычислителем, который может быть размещен или расположен на или в базовой станции или другом узле. Для позиционирования плоскости управления базовая станция может быть сконфигурирована, чтобы принимать ответный сигнал от пользовательского оборудования, причем ответный сигнал может содержать данные, относящиеся к сигналу позиционирования, и может указывать параметр приема сигнала позиционирования. Базовая станция может быть сконфигурирована, чтобы предоставлять параметр приема последовательности на вычислитель для определения информации точного положения.
Хотя некоторые аспекты были описаны в контексте устройства, понятно, что эти аспекты также представляют описание соответствующего способа, где блок или устройство соответствует этапу способа или признаку этапа способа. Аналогично, аспекты, описанные в контексте этапа способа, также представляют описание соответствующего блока или элемента или признака соответствующего устройства.
В зависимости от определенных требований реализации, варианты осуществления изобретения могут быть реализованы в аппаратных средствах или в программном обеспечении. Реализация может выполняться с использованием цифрового носителя хранения, например, флоппи–диска, DVD, CD, ROM, PROM, EPROM, EEPROM или FLASH–памяти, имеющих электронно–считываемые управляющие сигналы, хранящиеся на них, которые взаимодействуют (или способны взаимодействовать) с программируемой компьютерной системой, так что выполняется соответствующий способ.
Некоторые варианты осуществления в соответствии с изобретением содержат носитель данных, имеющий электронно–считываемые управляющие сигналы, которые способны взаимодействовать с программируемой компьютерной системой, так что выполняется один из способов, описанных в настоящем документе.
В общем, варианты осуществления настоящего изобретения могут быть реализованы как компьютерный программный продукт с программным кодом, программный код приводится в действие для выполнения одного из способов, когда компьютерный программный продукт исполняется на компьютере. Программный код может, например, храниться на машиночитаемом носителе.
Другие варианты осуществления содержат компьютерную программу для выполнения одного из способов, описанных в настоящем документе, хранящуюся на машиночитаемом носителе.
Другими словами, вариант осуществления соответствующего изобретению способа представляет собой, поэтому, компьютерную программу, имеющую программный код для выполнения одного из способов, описанных в настоящем документе, когда компьютерная программа исполняется на компьютере.
Другой вариант осуществления соответствующих изобретению способов представляет собой, поэтому, носитель данных (или цифровой носитель хранения или считываемый компьютером носитель), содержащий записанную на нем компьютерную программу для выполнения одного из способов, описанных в настоящем документе.
Другой вариант осуществления соответствующего изобретению способа представляет собой, поэтому, поток данных или последовательность сигналов, представляющую компьютерную программу для выполнения одного из способов, описанных в настоящем документе. Поток данных или последовательность сигналов может, например, быть сконфигурирована, чтобы переноситься посредством соединения передачи данных, например, через Интернет.
Другой вариант осуществления содержит средство обработки, например, компьютер или программируемое логическое устройство, сконфигурированное или адаптированное для выполнения одного из способов, описанных в настоящем документе.
Другой вариант осуществления содержит компьютер, имеющий установленную на нем компьютерную программу для выполнения одного из способов, описанных в настоящем документе.
В некоторых вариантах осуществления, программируемое логическое устройство (например, программируемая вентильная матрица) может использоваться, чтобы выполнять некоторые или все из функциональностей способов, описанных в настоящем документе. В некоторых вариантах осуществления, программируемая вентильная матрица может взаимодействовать с микропроцессором, чтобы выполнять один из способов, описанных в настоящем документе. В общем, способы предпочтительно выполняются посредством любого аппаратного устройства.
Вышеописанные варианты осуществления являются только иллюстративными для принципов настоящего изобретения. Понятно, что модификации и варианты компоновок и деталей, описанных в настоящем документе, будут очевидны специалистам в данной области техники. Поэтому предполагается ограничиваться только объемом нижеследующей формулы изобретения, а не конкретными деталями, представленными с целью описания и пояснения вариантов осуществления в настоящем документе.
Цитированные документы
[1] 3GPP, “LTE Positioning Protocol (LPP) (Release 13)", 3rd Generation Partnership Project, Mar. 2016 Second reference.
[2] 3GPP, “LTE Positioning Protocol A (LPPa) (Release 13)”, 3rd Generation Partnership Project, Mar. 2016.
[3] [3GPP15–37857] 3GPP, “Study on indoor positioning enhancements for UTRA and LTE”, 3rd Generation Partnership Project, Dec. 2015.
[4] EENA, “EENA Position Paper on the provision of mobile caller–location information in the context of calls to the European emergency number 112”, European Emergency Number Association, Dec. 2010.
[5] 3GPP, “Study on indoor positioning enhancements for UTRA and LTE”, 3rd Generation Partnership Project, Dec. 2015.
[6] 3GPP, “Physical Channels and Modulation”, 3rd Generation Partnership Project, vol. V13.0.0, January. 2016.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДАЧА МАЯКА ПО НЕЛИЦЕНЗИРУЕМОМУ СПЕКТРУ | 2014 |
|
RU2653604C2 |
| АБОНЕНТСКОЕ УСТРОЙСТВО, БАЗОВАЯ СТАНЦИЯ, СЕТЬ БЕСПРОВОДНОЙ СВЯЗИ, СИГНАЛ ДАННЫХ И СПОСОБ ДЛЯ ТОГО, ЧТОБЫ ОБЕСПЕЧИВАТЬ УЛУЧШЕННОЕ SPS-УПРАВЛЕНИЕ И НЕПРЕРЫВНУЮ SPS ПОСЛЕ ПЕРЕДАЧИ ОБСЛУЖИВАНИЯ | 2017 |
|
RU2721841C1 |
| СХЕМА РЕЗЕРВИРОВАНИЯ С ПРОСЛУШИВАНИЕМ ПЕРЕД ПЕРЕДАЧЕЙ ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ В НЕЛИЦЕНЗИРОВАННОМ СПЕКТРЕ | 2014 |
|
RU2673012C2 |
| БЕСПРОВОДНАЯ СВЯЗЬ С ОБРАТНОЙ СВЯЗЬЮ ПО НЕЛИЦЕНЗИРУЕМОМУ СПЕКТРУ | 2014 |
|
RU2667513C2 |
| РЕЖИМЫ КООРДИНИРОВАННОЙ МНОГОТОЧЕЧНОЙ ПЕРЕДАЧИ | 2013 |
|
RU2594749C1 |
| ОБОРУДОВАНИЕ ПОЛЬЗОВАТЕЛЯ, БАЗОВАЯ СТАНЦИЯ И СИСТЕМА БЕСПРОВОДНОЙ СВЯЗИ | 2017 |
|
RU2726873C1 |
| УПРАВЛЕНИЕ ПОМЕХАМИ, ОПТИМИЗАЦИЯ SINR И УСОВЕРШЕНСТВОВАНИЯ СИГНАЛИЗАЦИИ, ЧТОБЫ УЛУЧШИТЬ ПРОИЗВОДИТЕЛЬНОСТЬ ИЗМЕРЕНИЙ OTDOA | 2010 |
|
RU2535191C2 |
| УПРАВЛЕНИЕ ПОМЕХАМИ, ОПТИМИЗАЦИЯ SINR И УСОВЕРШЕНСТВОВАНИЯ СИГНАЛИЗАЦИИ, ЧТОБЫ УЛУЧШИТЬ ПРОИЗВОДИТЕЛЬНОСТЬ ИЗМЕРЕНИЙ OTDOA | 2014 |
|
RU2670196C2 |
| ТЕХНОЛОГИИ ДЛЯ ВЫБОРА ТИПА СУБКАДРА ИЛИ ДЛЯ ПЕРЕМЕЖЕНИЯ СИГНАЛОВ ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ ПО НЕЛИЦЕНЗИРОВАННОМУ СПЕКТРУ | 2014 |
|
RU2685700C2 |
| ТЕХНОЛОГИИ ДЛЯ ВЫБОРА ТИПА СУБКАДРА ИЛИ ДЛЯ ПЕРЕМЕЖЕНИЯ СИГНАЛОВ ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ ПО НЕЛИЦЕНЗИРОВАННОМУ СПЕКТРУ | 2014 |
|
RU2641311C2 |
Изобретение относится к области беспроводной связи. Техническим результатом является повышение точности определения местоположения пользовательского оборудования. Упомянутый технический результат достигается путем передачи сигнала позиционирования в направлении к пользовательскому оборудованию, в котором должно быть определено положение, т.е. с более высокой мощностью сигнала в направлении к UE или по сравнению с другим направлением. Улучшение может быть получено ввиду более высокой точности и/или ввиду более высокого числа пользовательских оборудований, которые могут принимать сигнал позиционирования. Направленность может обеспечить возможность высокой мощности сигнала и/или высокого отношения сигнал–шум для путей по линии видимости в пользовательском оборудовании и может, таким образом, обеспечить улучшение. Базовая станция сконфигурирована, чтобы управлять сотой сети беспроводной связи в сети беспроводной связи и чтобы использовать информацию грубого положения, относящуюся к грубому положению пользовательского оборудования для определения направления к пользовательскому оборудованию. Базовая станция сконфигурирована, чтобы передавать сигнал позиционирования на пользовательское оборудование и чтобы направлять передачу сигнала позиционирования к пользовательскому оборудованию. Сигнал позиционирования адаптирован, чтобы обеспечивать возможность определения информации точного положения, относящейся к пользовательскому оборудованию. 5 н. и 24 з.п. ф-лы, 12 ил.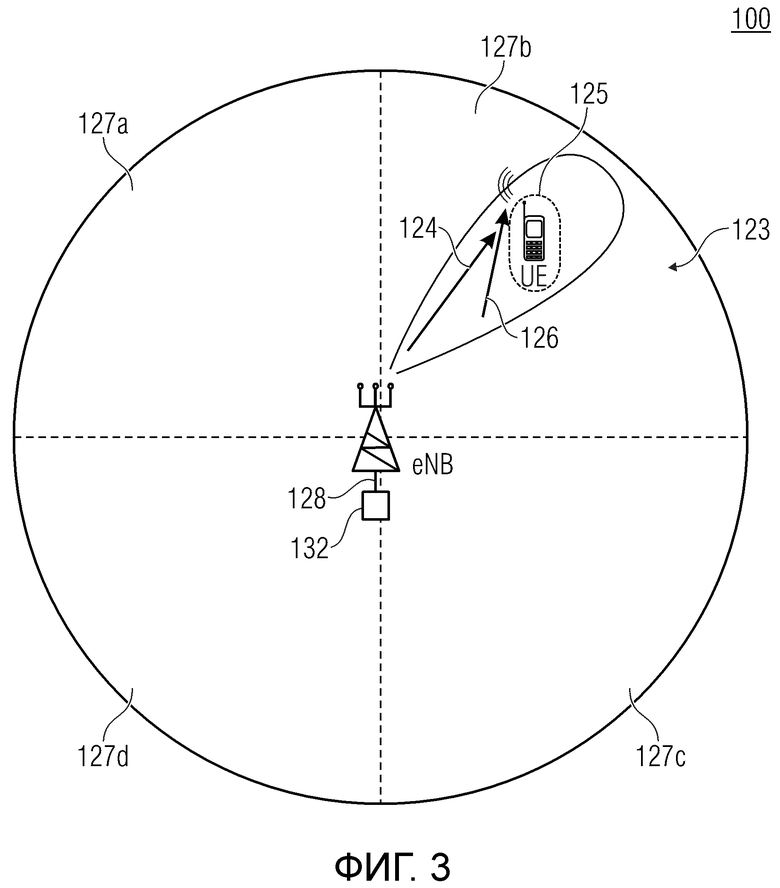
1. Базовая станция (eNB), сконфигурированная, чтобы управлять сотой (100) сети беспроводной мобильной связи в сети (900) беспроводной мобильной связи;
причем базовая станция (eNB) сконфигурирована, чтобы использовать информацию (123) грубого положения, относящуюся к грубому положению пользовательского оборудования (UE), чтобы определять направление к пользовательскому оборудованию (UE);
причем базовая станция (eNB) сконфигурирована, чтобы передавать сигнал (124) позиционирования на пользовательское оборудование (UE) и чтобы направлять передачу сигнала (124) позиционирования к пользовательскому оборудованию (UE);
причем сигнал позиционирования адаптирован, чтобы обеспечивать возможность определения информации (125) точного положения, относящейся к пользовательскому оборудованию (UE).
2. Базовая станция по п. 1, причем сигнал позиционирования адаптирован, чтобы обеспечивать возможность определения информации (125) точного положения на основе данных, относящихся к сигналу (124) позиционирования, причем данные указывают параметр приема сигнала (124) позиционирования.
3. Базовая станция по п. 1, причем базовая станция (eNB) сконфигурирована, чтобы принимать ответный сигнал (126) от пользовательского оборудования (UE), причем ответный сигнал (126) содержит данные, относящиеся к сигналу (124) позиционирования и указывающие параметр приема сигнала (124) позиционирования; и
причем базовая станция (eNB) сконфигурирована, чтобы обеспечивать параметр приема последовательности на вычислитель для определения информации (125) точного положения.
4. Базовая станция по п. 3, причем базовая станция (eNB) содержит контроллер.
5. Базовая станция по п. 2, причем параметр приема относится к по меньшей мере одному из времени прихода, разности времен прихода и направления прихода.
6. Базовая станция по п. 1, причем базовая станция (eNB) сконфигурирована, чтобы направлять передачу сигнала (124) позиционирования с использованием метода формирования диаграммы направленности.
7. Базовая станция по п. 1, причем базовая станция (eNB) сконфигурирована, чтобы передавать сигнал (124) позиционирования в совместно используемом канале (PDSCH) соты (100) сети беспроводной мобильной связи.
8. Базовая станция по п. 1, причем базовая станция (eNB) сконфигурирована, чтобы определять направление прихода на основе сигнала, принятого от пользовательского оборудования (UE), и причем базовая станция (eNB) сконфигурирована, чтобы определять информацию (123) грубого положения на основе направления прихода.
9. Базовая станция по п. 1, причем базовая станция (eNB) сконфигурирована, чтобы принимать информацию (123) грубого положения от сервера определения местоположения сети беспроводной мобильной связи или от дополнительной базовой станции (eNB).
10. Базовая станция по п. 1, причем базовая станция (eNB) сконфигурирована, чтобы принимать сигнал от пользовательского оборудования (UE), содержащий информацию положения, причем базовая станция (eNB) сконфигурирована, чтобы использовать принятую информацию положения в качестве информации (123) грубого положения.
11. Базовая станция по п. 1, причем пользовательское оборудование (UE) представляет собой первое пользовательское оборудование (UE1), и причем базовая станция (eNB) сконфигурирована, чтобы исключать направление ко второму пользовательскому оборудованию (UE2) или к дополнительной базовой станции (eNB) из направления сигнала (124) позиционирования.
12. Базовая станция по п. 1, причем базовая станция (eNB) сконфигурирована, чтобы принимать ответный сигнал (126) от пользовательского оборудования (UE), причем ответный сигнал (126) содержит данные, относящиеся к сигналу (124) позиционирования и указывающие параметр приема сигнала (124) позиционирования, и определять информацию (125) точного положения с использованием параметра приема, причем базовая станция сконфигурирована, чтобы повторять определение положения пользовательского оборудования (UE) на последующих этапах, причем базовая станция (eNB) сконфигурирована, чтобы использовать информацию (125) точного положения пользовательского оборудования (UE), определенную на первом этапе, в качестве информации (123) грубого положения на втором этапе, следующим за первым этапом.
13. Базовая станция по п. 12, причем базовая станция (eNB) сконфигурирована, чтобы направлять сигнал (124) позиционирования с использованием метода формирования диаграммы направленности, и причем базовая станция (eNB) сконфигурирована, чтобы уменьшать ширину второй диаграммы направленности, используемой на втором этапе, по сравнению с шириной первой диаграммы направленности, используемой на первом этапе.
14. Базовая станция п. 1, причем информация (125) точного положения является более точной по сравнению с информацией грубого положения по меньшей мере на 5%.
15. Базовая станция по п. 1, причем, чтобы направить передачу сигнала (124) позиционирования к пользовательскому оборудованию (UE), базовая станция (eNB) сконфигурирована, чтобы получать информацию, относящуюся по меньшей мере к первому направлению прихода первого пути и второму направлению прихода второго пути между базовой станцией (eNB) и пользовательским оборудованием (UE), и чтобы передавать сигнал (124) позиционирования вдоль первого направления и вдоль второго направления.
16. Базовая станция по п. 1, причем базовая станция (eNB) сконфигурирована, чтобы принимать информацию управления от пользовательского оборудования (UE) и направлять передачу сигнала (124) позиционирования к пользовательскому оборудованию (UE) в ответ на информацию управления, чтобы реализовать первую диаграмму направленности передачи, причем базовая станция (eNB) сконфигурирована, чтобы передавать сигнал (124) позиционирования в соответствии со второй диаграммой направленности передачи при отсутствии информации управления.
17. Базовая станция по п. 1, причем пользовательское оборудование (UE) ассоциировано с дополнительной базовой станцией (eNB) сети беспроводной мобильной связи, и причем базовая станция (eNB) сконфигурирована, чтобы принимать информацию (123) грубого положения от сервера определения местоположения сети беспроводной мобильной связи или от дополнительной базовой станции (eNB).
18. Базовая станция по п. 1, причем пользовательское оборудование (UE) представляет собой первое пользовательское оборудование (UE1), и причем сигнал (124) позиционирования представляет собой первый сигнал (1244–1) позиционирования, причем базовая станция (eNB) сконфигурирована, чтобы передавать первый сигнал (1244–1) позиционирования, чтобы он содержал первую последовательность из множества предопределенных последовательностей для сигналов позиционирования, причем базовая станция (eNB) сконфигурирована, чтобы передавать второй сигнал (1244–2) позиционирования, содержащий вторую последовательность из множества последовательностей, в направлении второго пользовательского оборудования (UE2), в то же время не передавая второй сигнал (1244–2) позиционирования в направлении первого пользовательского оборудования (UE1).
19. Базовая станция по п. 1, причем последовательность содержит опорный сигнал позиционирования или представляет собой опорный сигнал позиционирования.
20. Базовая станция по п. 1, причем сеть (900) беспроводной мобильной связи представляет собой сеть LTE.
21. Базовая станция по п. 1, причем базовая станция сконфигурирована, чтобы определять путь по линии видимости между пользовательским оборудованием (UE) и базовой станцией, причем базовая станция сконфигурирована, чтобы передавать сигнал (1241–4) позиционирования вдоль направления пути по линии видимости, в то же время исключая направление пути не по линии видимости.
22. Сеть (900) беспроводной мобильной связи, содержащая:
первую базовую станцию (eNB4) по п. 1 и вторую базовую станцию (eNB2, eNB3, eNB5) по п. 1, причем первая базовая станция (eNB4) сконфигурирована, чтобы передавать первый сигнал (1244–1, 1244–2) позиционирования, и причем вторая базовая станция (eNB2, eNB3, eNB5) сконфигурирована, чтобы передавать второй сигнал (1242, 1243, 1245) позиционирования,
пользовательское оборудование (UE1);
причем первая базовая станция (eNB4) и вторая базовая станция (eNB2, eNB3, eNB5) сконфигурированы, чтобы координированным образом использовать метод формирования диаграммы направленности для передачи первого и второго сигналов позиционирования.
23. Сеть беспроводной мобильной связи по п. 22, причем первая базовая станция (eNB4) сконфигурирована, чтобы передавать первый сигнал (1244–1) позиционирования, содержащий первую последовательность из множества предопределенных последовательностей для сигналов положения, в направлении пользовательского оборудования (UE1), и причем вторая базовая станция (eNB2, eNB3, eNB5) сконфигурирована, чтобы передавать второй сигнал (1242, 1243, 1245) позиционирования, содержащий вторую последовательность, в направлении пользовательского оборудования (UE1).
24. Сеть беспроводной мобильной связи по п. 23, причем первая базовая станция (eNB4) сконфигурирована, чтобы передавать первый сигнал (1244–1) позиционирования на пользовательское оборудование (UE1) в течение первого временного интервала и не в течение второго временного интервала, следующего за первым временным интервалом, причем вторая базовая станция (eNB2, eNB5) сконфигурирована, чтобы передавать второй сигнал (1242, 1245) позиционирования на пользовательское оборудование (UE) в течение второго временного интервала и не в течение первого временного интервала.
25. Сеть беспроводной мобильной связи по п. 22, причем пользовательское оборудование (UE1) представляет собой первое пользовательское оборудование, причем сеть беспроводной мобильной связи содержит второе пользовательское оборудование (UE2), и причем первая базовая станция (eNB4) сконфигурирована, чтобы передавать третий сигнал (1244–2) позиционирования, содержащий первую последовательность из множества последовательностей, но не вторую последовательность, в направлении второго пользовательского оборудования (UE2).
26. Сеть беспроводной мобильной связи по п. 24, причем первая базовая станция (eNB4) сконфигурирована, чтобы передавать первый сигнал (1244–1) позиционирования, содержащий первую последовательность из множества предопределенных последовательностей для сигналов положения, в направлении пользовательского оборудования (UE1), и причем вторая базовая станция (eNB2, eNB3, eNB5) сконфигурирована, чтобы передавать второй сигнал (1242, 1243, 1245) позиционирования, содержащий первую последовательность, в направлении пользовательского оборудования (UE1), и причем первая базовая станция (eNB4) сконфигурирована, чтобы передавать первый сигнал (1244–1) позиционирования на пользовательское оборудование (UE1) в течение первого временного интервала, но не в течение второго временного интервала, следующего за первым временным интервалом, причем вторая базовая станция (eNB2, eNB5) сконфигурирована, чтобы передавать второй сигнал (1242, 1245) позиционирования на пользовательское оборудование (UE) в течение второго временного интервала, но не в течение первого временного интервала.
27. Способ функционирования базовой станции, управляющей сотой сети беспроводной мобильной связи в сети беспроводной мобильной связи, содержащий:
использование (1200) информации грубого положения, относящейся к грубому положению пользовательского оборудования, чтобы определить направление к пользовательскому оборудованию;
передачу (1300) сигнала позиционирования на пользовательское оборудование, причем сигнал позиционирования адаптирован, чтобы обеспечивать возможность определения информации (125) точного положения, относящейся к пользовательскому оборудованию (UE), и направление передачи сигнала позиционирования к пользовательскому оборудованию для определения информации точного положения, относящейся к пользовательскому оборудованию.
28. Способ функционирования сети беспроводной мобильной связи, содержащий:
функционирование пользовательского оборудования в сети беспроводной мобильной связи;
функционирование первой базовой станции (eNB4) по п. 1 и функционирование второй базовой станции (eNB2, eNB3, eNB5) по п. 1, чтобы координированным образом использовать метод формирования диаграммы направленности для передачи первого и второго сигнала позиционирования.
29. Считываемый компьютером носитель, хранящий инструкции, которые, при исполнении на компьютере, выполняют способ по одному из пп. 27 или 28.
| US20060194587 A1, 31.08.2006 | |||
| WO2016153253 A1, 29.09.2016 | |||
| US2003100314 A1, 29.05.2003 | |||
| ДИНАМИЧЕСКАЯ ОБРАБОТКА ЗАПРОСА ПОЗИЦИИ ИЗМЕРЕНИЯ В МОБИЛЬНОЙ РАДИОСЕТИ | 2008 |
|
RU2464589C2 |
| WO2017023483 A1, 09.02.2017 | |||
| US2013314104 A1, 28.11.2013. | |||

