ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Отсылки к родственным заявкам: настоящая заявка относится к предварительным заявкам на патент США 62/317588 и 62/396512 и испрашивает приоритет по предварительной заявке на патент США 62/317588, поданной 3 апреля 2016 г.
1. Область техники изобретения
Настоящее изобретение относится к циклоидным роторам или пропеллерам и, в частности, к типу циклоидных роторов или пропеллеров, лопасти которых могут вращаться по различным некруговым орбитам.
2. Уровень техники
В настоящее время потенциал летательных аппаратов с циклоидными роторами получает все большее признание. Большинство летальных аппаратов (ЛА) имеют различные требования в части подъемной силы и тяги, в зависимости от этапа полета. В частности, для ЛА типа СВВП и СКВП для взлета желательно высокое отношение подъемной силы к тяге. Циклоидные роторы дают возможность изменять отношение подъемной силы к тяге изменением угла атаки лопастей во время вращения. Патенты США № 5265827 и 6932296 описывают примеры уровня техники, включающие вращение циклоидных роторов по круговой орбите. Патент США №8549485, поданный автором, описывает циклоидные роторы или пропеллеры с некруговыми орбитами вращения лопастей.
В предшествующих версиях циклоидных роторов с лопастями, вращающимися по круговой орбите, период обращения вокруг оси, во время которого лопасть может производить требуемый аэродинамический эффект, а также типы производимых аэродинамических эффектов, ограничены геометрией круговой орбиты и только двумя доступными степенями свободы движения: вращение вокруг центральной оси и поворотом для изменения шага лопасти при вращении. Это обстоятельство ограничивает эффективность циклоидных роторов. Кроме того, хотя мы не связаны результатами исследования расчетной флюидодинамики, указанное исследование продемонстрировало, что круговая орбита является наихудшим вариантом в части подъемной силы на единицу мощности среди траекторий (в основном, эллиптических), испытанных для воздушных роторов. Ограниченная эффективность, которая, тем не менее, обычно выше, чем у гребных винтов, также проявляется в циклоидных пропеллерах, используемых для судового применения, где подъемная сила не производится, только тяга. Например, они, на большей части траектории, производят компоненты вектора больших сил, перпендикулярные направлению тяги, которые нейтрализуются, но мощности двигателя тратятся на их производство. Лопасти различных предшествующих вариантов циклоидных роторов с некруговыми орбитами вращения из патента, ссылка на который представлена выше, имеют больше степеней свободы движения и могут следовать оптимизированным некруговым траекториям, при этом относительный воздушных поток, угол атаки и, опционально, пространственная ориентация лопастей постоянно оптимизируются для достижения максимальной эффективности, подъемной силы, горизонтальной скорости движения или наиболее бесшумной работы. Однако в указанном патенте представленные варианты лопастей способны следовать некруговым траекториям либо посредством постоянного вовлечения линейных приводов, непрерывно управляемых системой управления для изменения радиального расстояния от оси вращения, что формирует траекторию движения лопастей, либо посредством следования установленной некруговой направляющей, соответствующей форме орбиты. В этих вариантах непрерывная работа линейных приводов и использование их ресурсов потребует регулярных профилактических работ и замену этих приводов. Постоянная непрерывная зависимость от автоматизированной системы управления по всем аспектам работы ротора при условии неизменности режима работы нежелательна, поскольку это увеличивает шансы возникновения неисправности ротора из-за проблем в программной части, аппаратуре компьютера, неисправности привода или нарушениям из-за, к примеру, таких факторов, как электромагнитные импульсы или электронные помехи. Соответственно, в одном варианте применения из упомянутого выше патента, где лопасти следуют установленной некруговой направляющей, перемещаясь радиально вдоль радиальной направляющей ротора и не полагаясь при этом на регулируемые системой управления линейные приводы, очевидны повышенная надежность и простота эксплуатации, однако, поскольку существуют различные режимы и условия полета, было бы желательно, чтобы у ротора была возможность использовать не только одну, но ряд некруговых направляющих, соответствующих различным траекториям, а также иметь возможность перехода от одной конфигурации направляющей к другой и изменять режим угла атаки в зависимости от режима полета и условий. Как и в вариантах, представленных в перечисленных выше патентах, в нашем варианте используется направляющая, по которой движутся ролики, установленные на лопасть, таким образом, обеспечивая соответствующий шаг лопастей при их движении по орбите вращения. Очевидно, потребуется несколько таких форм направляющих шага лопастей, если будет использоваться несколько форм траекторий. Кроме того, для каждой формы направляющей для следования траектории лопасти может потребоваться более одной формы направляющей шага лопасти для различных режимов полета. Следует отметить, что на симметричных направляющих и, соответственно, орбитах вращения лопастей, таких как эллиптическая орбита с четным количеством лопастей, каждая лопасть будет уравновешиваться противоположной лопастью, но при несимметричных направляющих и/или нечетном количестве лопастей для поддержания баланса ротора или пропеллера могут быть использованы известные решения с противовесами, например, средства, подобные описанные в патенте США № 8540485 и/или заявке на патент WO2014037948A1. Кроме того, следует отметить, что, поскольку потоки вокруг лопасти в работающем роторе или пропеллере сложны и различаются очень существенно по мере продвижения по орбите, разумно предположить, что для вращающейся лопасти в любой момент времени существует одна оптимальная форма поперечного сечения. Если лопасть или соответствующая ее часть, такая как часть, прилегающая к задней кромке, будет гибкой, или при наличии поворотного закрылка, изгибание лопасти и/или поворот указанного закрылка можно осуществить, обеспечив лопасть толкателями, установленными для перемещения хотя бы по одной направляющей, форма которой соответствует требуемому режиму изгиба или поворота. Однако для более сложных изгибов лопасти и, следовательно, изменения формы поперечного сечения, может понадобиться более одной направляющей. Естественно, для разных оборотов, режимов полета или условий режимы изгиба или поворота будут отличаться и, следовательно, потребует переход к другой форме направляющей(их), управляющих изгибом лопасти или поворотом задней кромки. Если обобщить вышесказанное, то установленная направляющая с более чем одной формой и возможностью перехода между ними, может потребоваться для следующих задач: управление орбитальной траекторией лопасти, изменение шага, а также формы поперечного сечения. Для последнего может потребоваться более одной направляющей. Следует отметить, что возможные различные сочетания инженерных решений для ротора или пропеллера настоящего изобретения, такие как, например, меняющая форму направляющая для управления траекторией лопасти в сочетании с независимым для каждой лопасти приводом, регулирующим шаг лопасти и изгиб поперечного сечения лопасти или, возможно, удлиненная направляющая фиксированной формы, устанавливающая траекторию лопасти с изменяющими форму направляющими для изменения шага лопасти и изгиба поперечного сечения лопасти и другие подобные сочетания. Кроме того, следует отметить, что указанные направляющие необязательно должны быть типа, предназначенного для кареток лопастей с роликами или колесиками; их можно спроектировать с применением пористых или перфорированных воздушных прокладок или иных средств, использующих воздушную смазку. Подобные инженерные решения могут быть использованы для кареток лопастей, работающих в водной среде, в том числе использующих подачу воды под давлением в зазор между соответствующими поверхностями указанной каретки и направляющей и/или указанной каретки, скользящей вдоль поверхности направляющей. В качестве альтернативы для воздушных роторов эти направляющие можно реализовать в виде магнитных кареток с магнитами подходящих видов расположенных на направляющей, и, возможно, собранных в магнитные сборки Халбаха, либо сама направляющая может быть соответственно намагничена, в то время как на каждой лопасти в заданном месте (местах) по заданному шаблону крепятся проводящие провода или обмотки, например, сделанные из чрезвычайно легкого и коррозионностойкого графенового электропровода, чтобы вызвать индукцию магнитного поля электрического тока в них, вызванную магнитным полем путем взаимодействия с магнитным полем, исходящим из магнитов, что вызовет эффект левитации - это известная технология. Направляющая для создания эффекта магнитной левитации может быть изготовлена из прерывистого ряда отдельных или сгруппированных магнитных элементов, при этом магнитные элементы могут быть шарнирно закреплены так, чтобы иметь возможность наклоняться/откидываться, таким образом, обращаясь к каждой лопасти, и возвращаться в исходное положение, после того как она проходит над ними. Указанные магнитные элементы также могут сочетать в себе возможность регулировки положения, чтобы обеспечить изменение формы направляющей. Кроме того, последовательно активируемые магниты, установленные по указанной магнитной направляющей, могут быть использованы для перемещения лопасти, линейная скорость которой будет контролироваться независимо и не будет зависеть от радиального расстояния от оси, что является известной технологией. Обеспечение пропеллера или ротора оптимизированной траекторией лопасти в сочетании с оптимизированным режимом изменения шага лопасти по всей орбите, а также, опционально, возможностью изменять поперечное сечение лопасти очевидным образом приведет к улучшению характеристик ротора или пропеллера и его эффективности в сравнении с существующими циклоидными роторами или пропеллерами, работающими по круговой орбите, в которых указанные функции отсутствуют, а также, даже в большей степени, в сравнении с винтовыми пропеллерами и роторами, которые на сегодняшний день преобладают. Однако контроль потоков внутри пропеллера или ротора и вокруг него приведет к достижению еще большей эффективности и лучших характеристик. Также, как известно, работа циклоидного воздушного ротора может быть нарушена порывами ветра. Кроме того, согласно исследованию расчетной флюидодинамики, ссылка на которое дана выше, результатами которого мы не связаны, при горизонтально вытянутой траектории лопастей особенно негативно влияют горизонтальные встречные потоки, что приводит к нарушению сложной структуры потоков внутри ротора, которые в противном случае существовали бы внутри такого ротора, и вызывает крайне нестабильные и во многом хаотичные потоки внутри такого ротора, значительно снижая его подъемную силу на единицу мощности и общую подъемную силу и приводя к дестабилизации ЛА. Для того чтобы предотвратить уменьшение подъемной силы и/или дестабилизацию ЛА, ротор можно покрыть обтекателем или частично или полностью закрыть кожухом с регулируемым воздухозаборником с отверстиеми сверху и снизу корпуса. Контроль потоков может быть достигнут обеспечением ротора направляющими пластинами контроля внутренних и/или внешних потоков, которые можно также снабдить возможностью изменения поперечного сечения и/или продольной формы, размеров, а также их расположения или пространственную ориентацию в двух или трех измерениях. Где это уместно, указанным пластинам можно при желании придать любую форму, в зависимости от их рабочей среды, соответственно, в виде аэро- или гидропрофилей, чтобы обеспечить необходимую подъемную силу или тягу при взаимодействии с потоками вокруг них или для перенаправления потоков в случае необходимости. С другой стороны, увеличение гибкости поперечного сечения лопастей может привести к снижению жесткости по длине. Обеспечивая противодействие центробежной силе, которая, как правило, является наибольшей силой, действующей на лопасти воздушного циклоидного ротора, например, на середину по длине лопасти, можно компенсировать прогиб лопасти. Указанная уравновешивающая сила может быть обеспечена, например, шнуром или ремнем, изменяющим длину в соответствии с радиальным положением лопастей, от миниатюрной (где это уместно) катушки на валу, прикрепленном к лопасти, или иной направляющей. При этом каретки лопастей, двигаются по направляющей, возможно, не на всю длину периметра, но только там, где центробежная сила больше всего. Конечно, форму указанной направляющей также необходимо изменить в соответствии с изменением формы направляющей, определяющей траекторию лопасти, а также, возможно, придется ее переместить, чтобы сохранить требуемое расстояние между этой направляющей и направляющей, определяющей траекторию лопасти. Такая направляющая может быть либо подходящей для механических средств следования, таких как ролики или воздушные прокладки или прокладки для аквапланирования, в зависимости от рабочей среды. Также такая направляющая может состоять из магнитов, как описанная выше, что позволит обеспечить наиболее простое взаимодействие с лопастью и избежать любых механических контактов с ней и любых эффектов механических столкновений, когда она входит, проходит по или покидает полностью отрезок указанной направляющей.
Если направляющие фиксированной формы или изгибаемого типа, используемые для изменения шага лопасти, проходят вдоль траектории лопасти, их длина и, соответственно, вес, скорее всего, будут иметь значение. Для того чтобы использовать направляющие меньшего размера, определяющие шаг лопасти, необходимо обеспечить механизмы соединения таких уменьшенных направляющих с лопастями. Поскольку траектория лопастей и, соответственно, расстояние от указанных направляющих могут варьироваться, решение может быть обеспечено путем преобразованием формы направляющей шага лопасти, обычно обеспечиваемым средствами следования по орбите, в поворотное движение валов, которые посредством зубчатых конических передач поворачивают лопасти, таким образом, изменяя их шаг. Такие валы могут быть телескопическими, при этом коническaе зубчатая шестерня в соединении с конической шестерней лопасти, размещенной на каретке, движущейся по длине поворотного вала, с тем чтобы адаптироваться к вариативности расстояния между лопастями и направляющей из-за некруговой структуры и изменчивости траектории лопасти. Изменение формы направляющей шага лопасти, переданное средствами следования, может быть преобразовано в поворотное движение посредством шариковой гайки с крупным шагом резьбы, установленной на вал, так что радиальное возвратно-поступательное движение стержня с резьбой, установленного на средство следования, становится поворотным движением вала. Альтернативные конструкции включают использование шестеренки и зубчатой рейки, преобразующих радиальное возвратно-поступательное движение рейки в поворотное движение, которое затем посредством зубчатой конической передачи, установленной на валу, используется для поворота лопасти, таким образом, изменяя ее шаг. Другая возможность - изменение формы направляющей шага лопасти вне ее плоскости при помощи средства следования, установленного на рычаге, закрепленном на конце телескопического вала, который поворачивает указанный рычаг и вал во время следования по направляющей.
3. Сущность изобретения.
Одной задачей настоящего изобретения является создание циклоидных роторов с оптимизированной эффективностью и потоками, отличающихся тем, что лопасти имеют возможность следовать различным некруговым орбитам вращения, подходящим для различных режимов работы, при этом линейные приводы и автоматизированная система управления, контролирующая эти приводы, ответственные за формирование орбит вращения лопастей, не задействованы постоянно, что увеличивает надежность ротора.
Еще одной задачей настоящего изобретения является создание ротора с оптимизированной эффективностью и потоками с возможностью выбора направляющей некруговой формы, соответствующей требуемой орбите лопасти из множества вариантов на основе исходных данных, введенных пилотом/оператором или определенных системой управления, при этом лопасти должны следовать указанной направляющей до тех пор пока введенные пилотом/оператором или определенные системой управления данные не выберут направляющую, соответствующую другой некруговой орбите, подходящей для другого режима работы или условий.
Еще одной задачей настоящего изобретения является создание ротора с оптимизированной эффективностью и потоками с возможностью выбора формы направляющей для изменения шага лопасти, соответствующего нужному режиму шага лопасти из ряда предложенных форм.
Еще одной задачей настоящего изобретения является обеспечение указанного ротора возможностью опционального выбора, как минимум, одной изгибаемой формы направляющей, соответствующей необходимому поперечному изгибу лопасти и/или режиму поворота задней кромки из ряда доступных вариантов форм.
Еще одной задачей настоящего изобретения является создание ротора с оптимизированной эффективностью и потоками внутри ротора и/или рядом с ним посредством введения внутренних и/или внешних пластин, чья пространственная ориентация регулируется дополнительно, как их формы продольного и поперечного сечения, а также их положение в 2 или 3 измерениях.
Еще одной задачей настоящего изобретения является обеспечение противодействия центробежной силe, действующей на лопасть, которoe будет действовать, чтобы предотвратить ее изгибание и возможную поломку.
Еще одной задачей настоящего изобретения является создание обтекателя или частичного кожуха для ротора, чтобы сделать его независимым от встречного потока и, следовательно, обеспечить его устойчивую работу на различных скоростях.
4. Краткое описание чертежей.
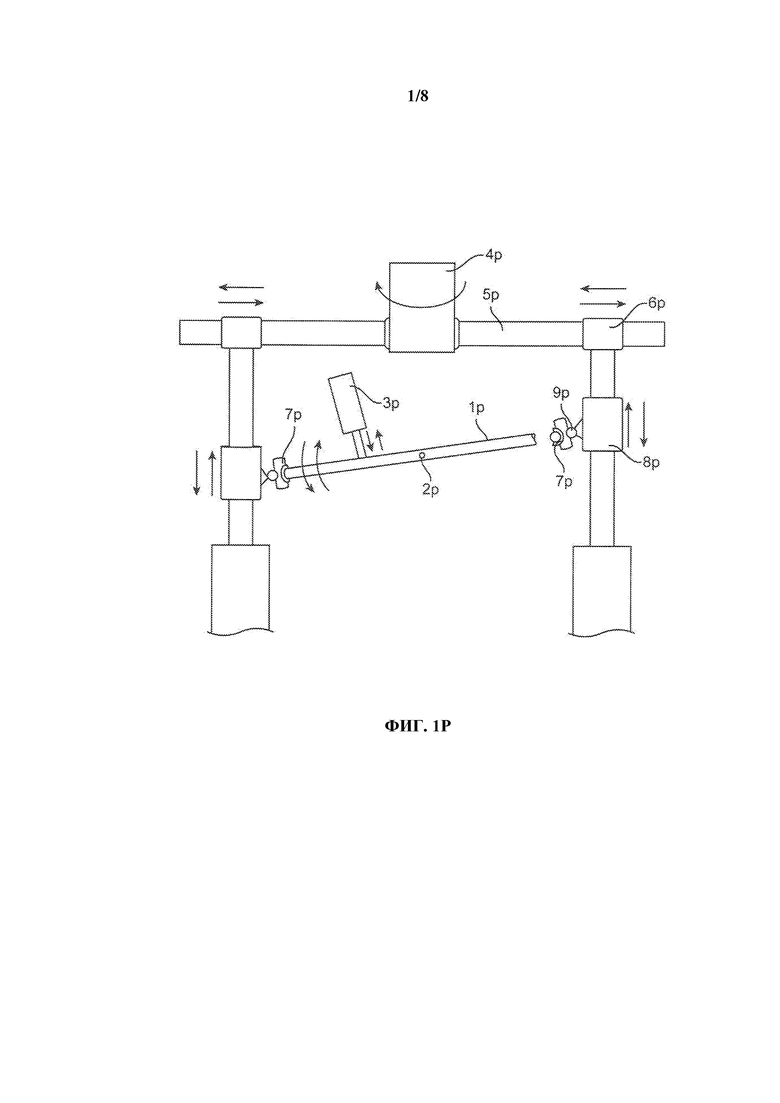
Фиг. 1P представляет собой схематическое изображение одного из вариантов циклоидного пропеллера настоящего изобретения, оснащенного эллиптической направляющей фиксированной формы, которая может поворачиваться вокруг вокруг большой оси эллипса на заданный угол для проецирования указанной направляющей на плоскость движения лопастей, что и определяет фактическую траекторию лопасти, форма которой в общем будет представлять собой эллипс различного соотношения двух его больших осей, а не форму вышеупомянутой эллиптической направляющей.
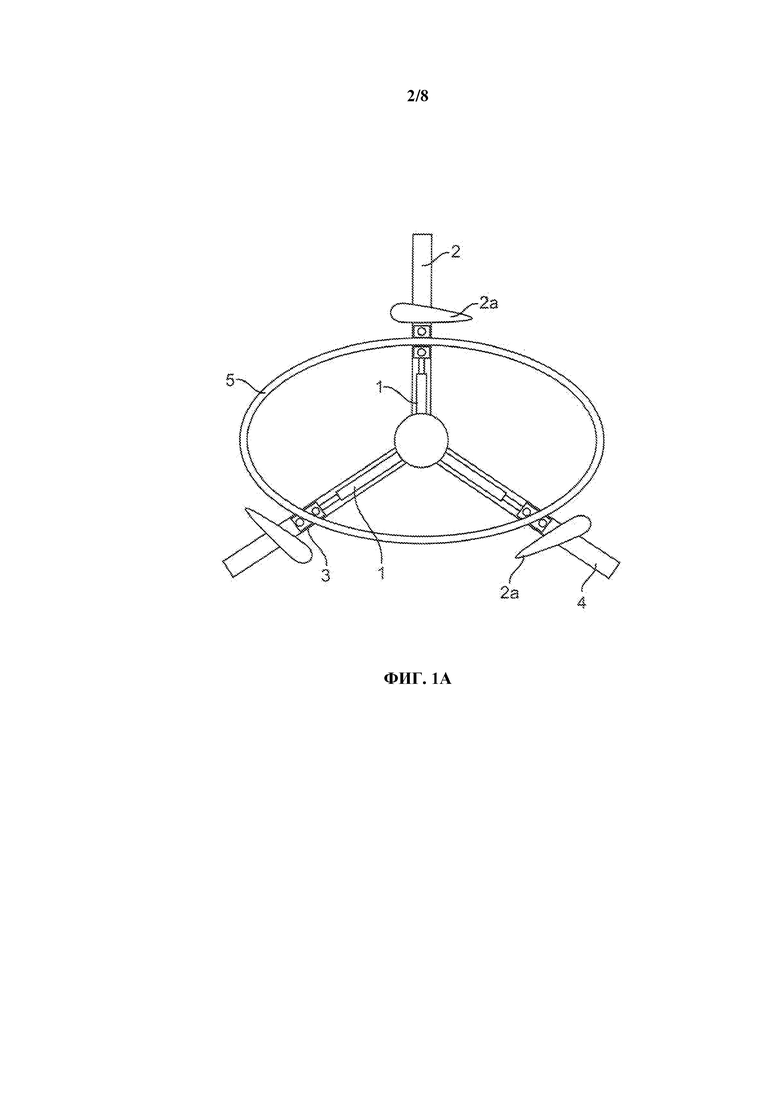
Фиг. 1A представляет собой схематическое представление одного из вариантов циклоидного ротора настоящего изобретения, оснащенного радиальными линейными приводами и гибкими направляющими со слоем электрореологической жидкости, находящейся между поверхностями в шарнирных соединениях.
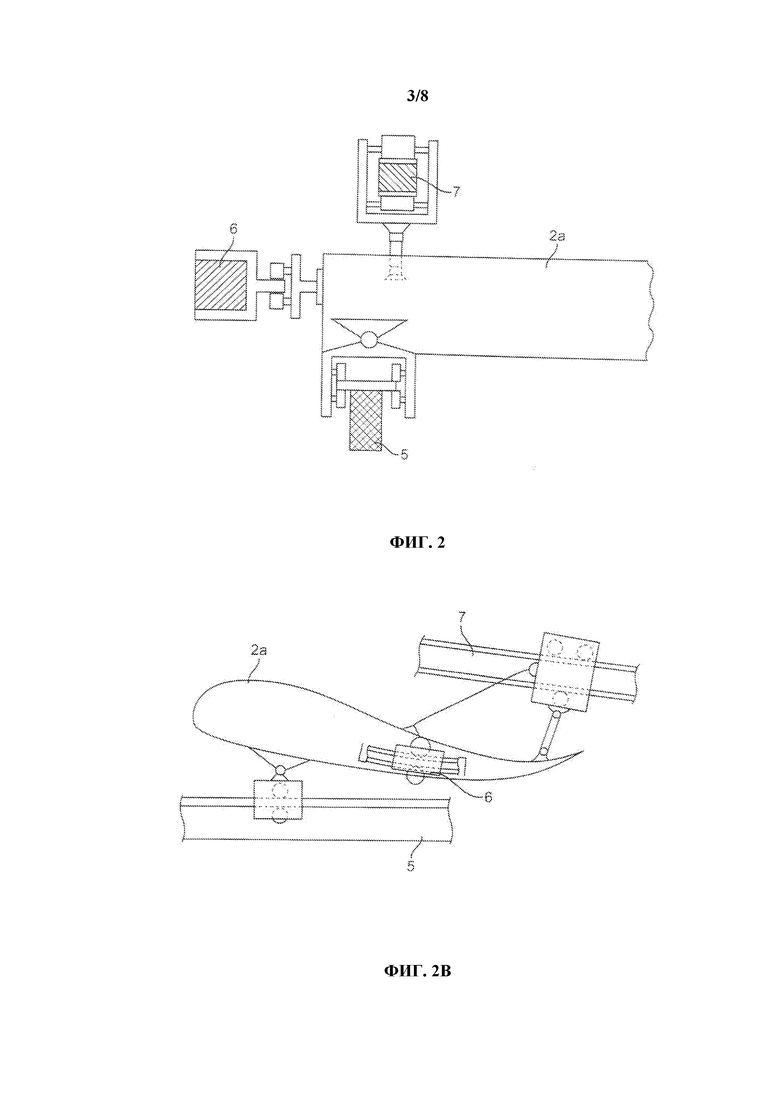
Фиг. 2 является упрощенным схематическим фронтальным изображением ротора, соответствующего настоящему изобретению, с возможностью изменения формы направляющей для контроля траектории движения лопасти, а также формами для регулирования шага и изменения формы поперечного сечения лопастей.
Фиг. 2B представляет собой упрощенный схематический вид сбоку ротора настоящего изобретения, изображенного на Фиг. 2.
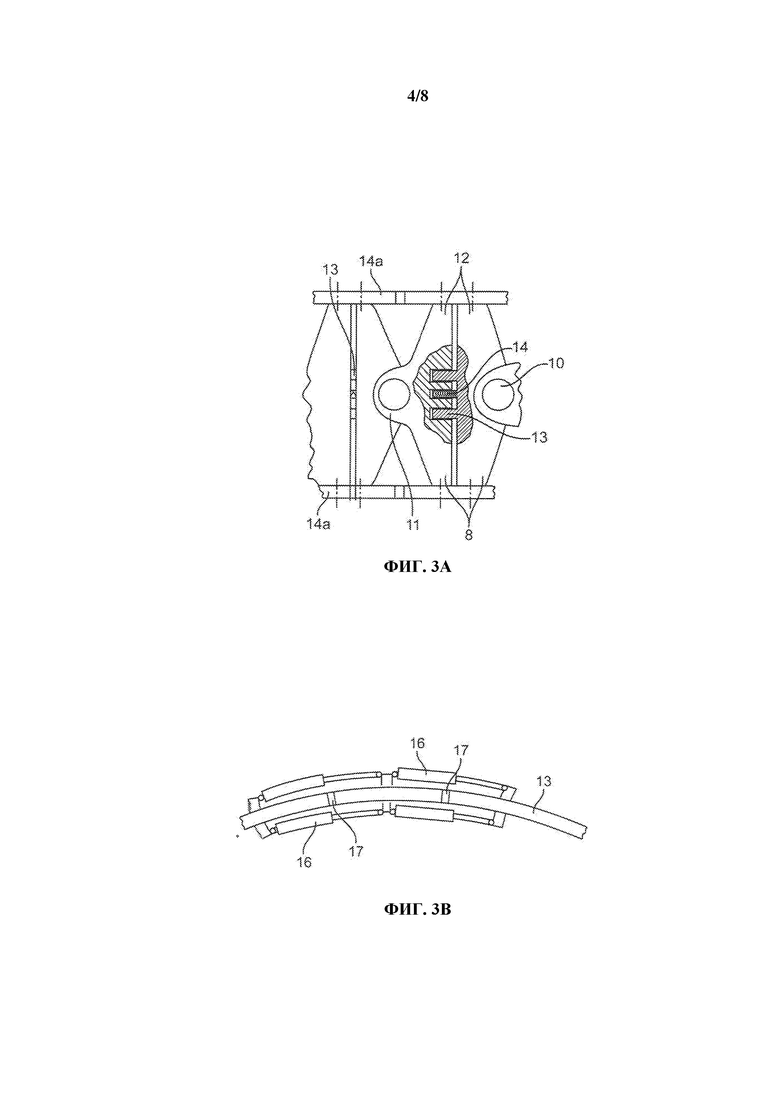
Фиг. 3А представляет собой частичный вид изгибаемой направляющей, включающий еще один вариант циклоидного ротора настоящего изобретения, при этом указанная изгибаемая направляющая включает элементы расширения/контакта, установленные на сегменты направляющей, что позволяет посредством надлежащей последовательной активации установленных элементов изгибать направляющую в необходимую форму, соответствующую требуемой форме орбиты движения лопасти.
Фиг. 3В представляет собой вид в разрезе изгибаемой направляющей другого варианта циклоидного ротора настоящего изобретения, при этом указанная направляющая имеет приводы для изменения длин частей указанной направляющей и также изгибания указанных частей, что позволяет посредством надлежащей последовательной активации установленных приводов изгибать направляющую в необходимую форму, соответствующую требуемой форме орбиты движения лопасти.
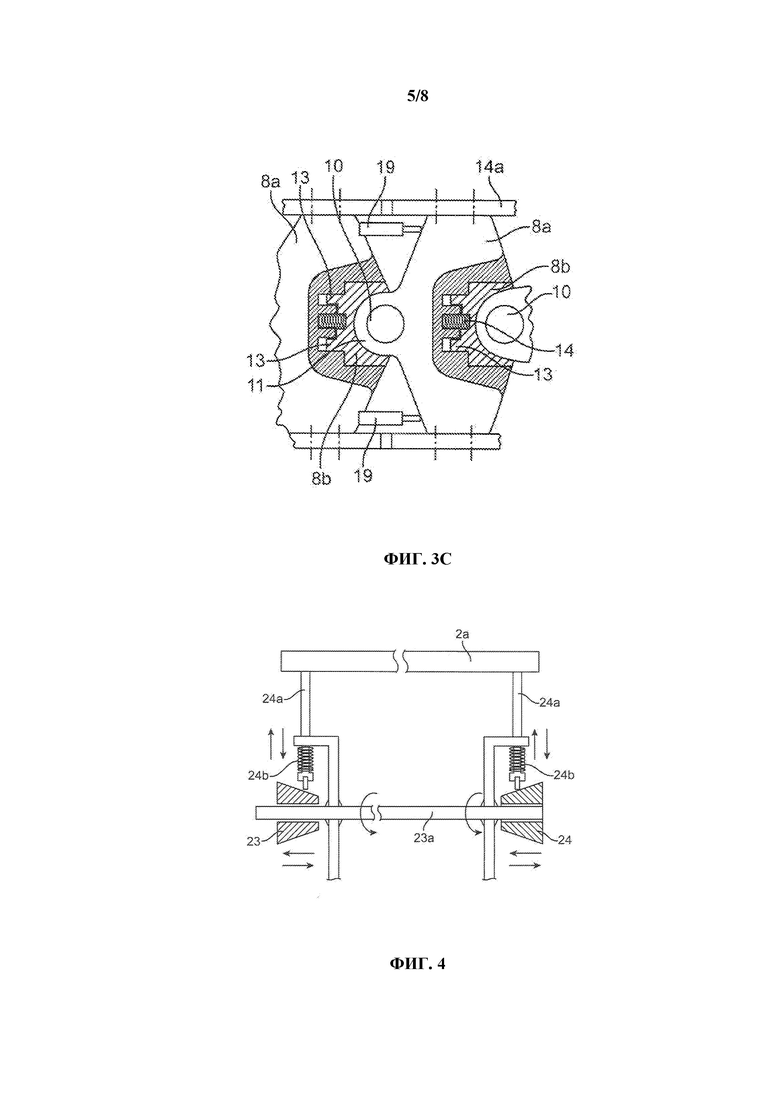
Фиг. 3С представляет собой вариант изгибаемой направляющей с использованием подвижных клиньев для изменения формы направляющей.
Фиг. 4 представляет еще один вариант механизма регулирования траектории для обеспечения нескольких некруговых орбит вращения лопастей или различных шагов лопастей; используя аксиально двигающийся кулачковый вал с различными формами поперечного сечения по его длине, вокруг которого вращаются ролики, соединенные с лопастями, движущимися радиально на радиально направляющих ротора при вращении ротора.
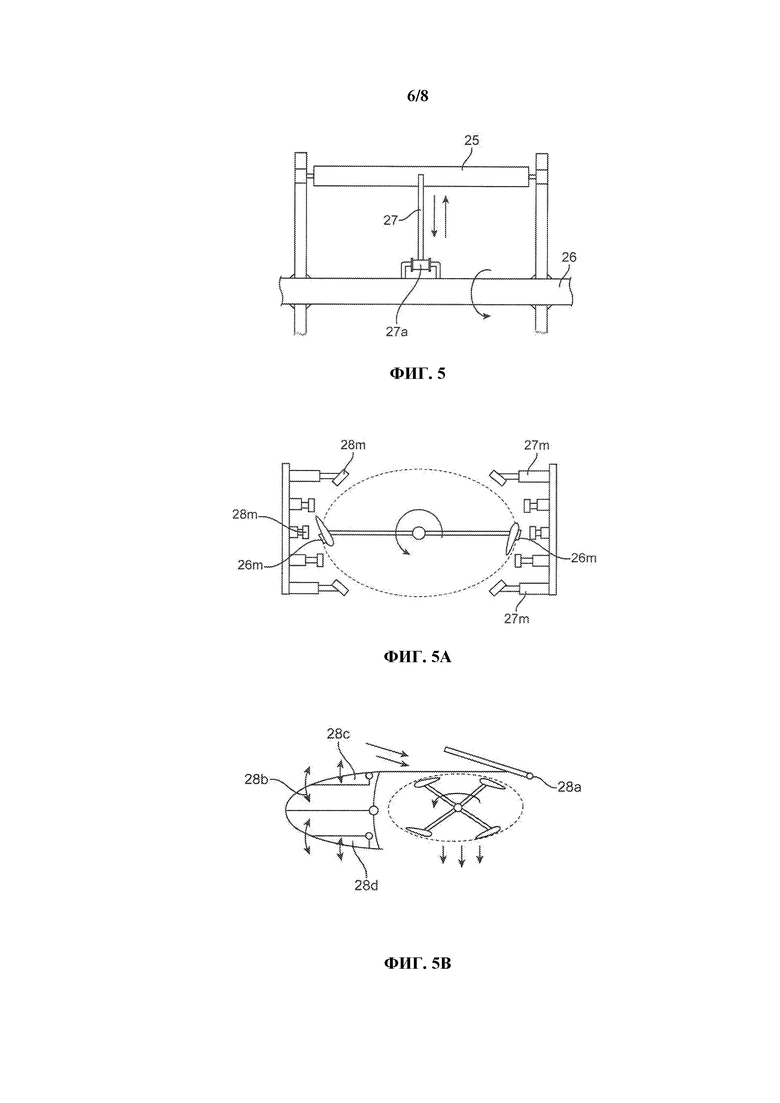
На Фиг. 5 изображен механизм для нейтрализации воздействия центробежной силы на лопасти.
На Фиг. 5А изображен ротор с электромагнитными направляющими вращения лопастей.
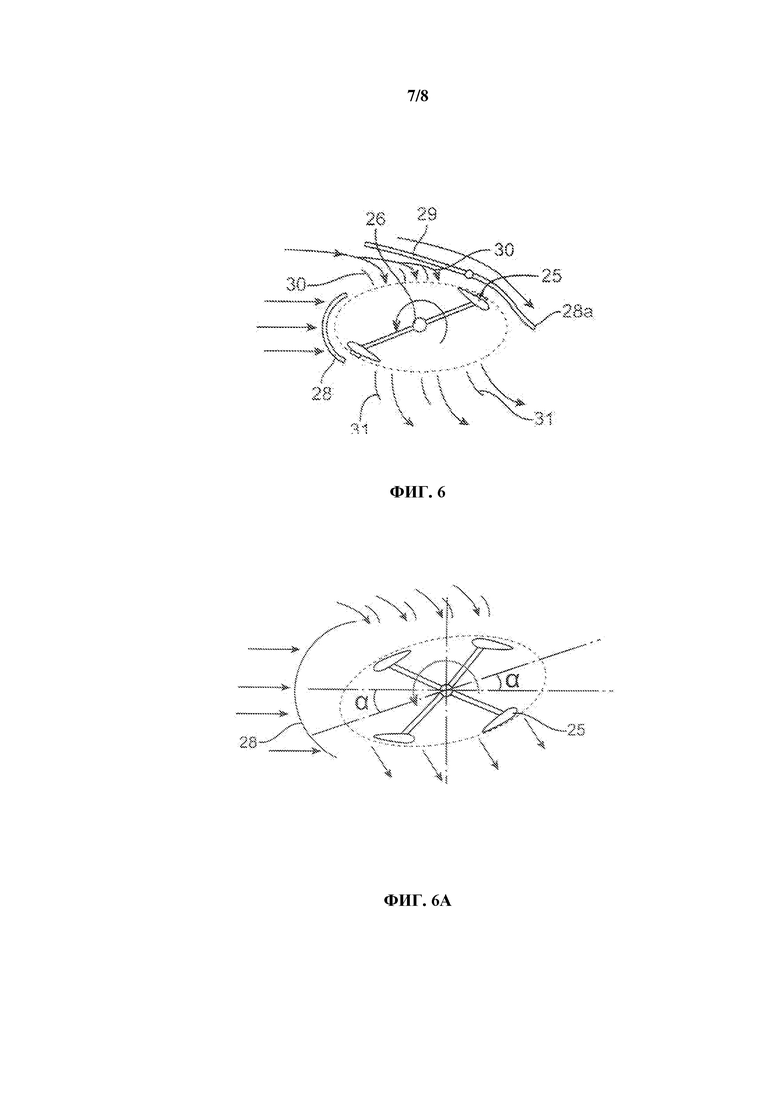
На Фиг. 6 изображен ротор с обтекателями и пластинами.
На Фиг. 6А изображен ротор с наклонной удлиненной траекторией.
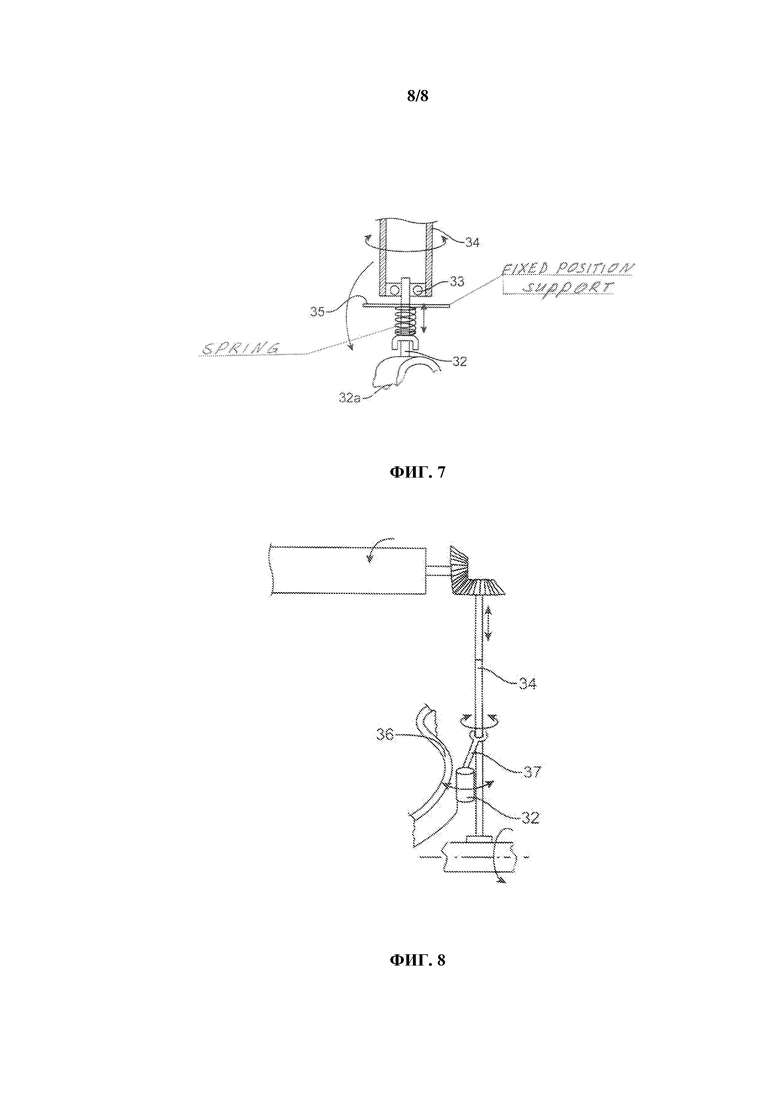
На Фиг. 7 изображена шариковая гайка с применением поворотного оперативного соединения варьируемой длины между направляющей шага лопасти и лопастью для изменения шага лопасти при ее движении по некруговой траектории.
На Фиг. 8 изображено поворотное оперативное соединение варьируемой длины между средством следования по направляющей шага лопасти, изгибающейся из своей плоскости, и лопастью для регулирования шага лопасти, движущейся по некруговой траектории.
5. Описание предпочтительного варианта осуществления изобретения.
Описывается один тип ротора/пропеллера, в котором изменение траектории лопасти достигается посредством изменения проекции направляющих фиксированной формы на плоскость, в которой движутся каретки лопастей, а также три базовых типа роторов или пропеллеров с возможностью изменения действительной формы направляющей, по которой скользят каретки лопастей. Те же типы механизмов могут быть использованы для изменения шага лопасти посредством изменения действительной формы направляющей или ее проекции, по которой скользят средства следования за лопастью. Таким же образом опционально те же типы механизмов могут быть использованы для изменения формы направляющей, используемой для определения изгиба поперечного сечения лопасти, если применимо, или для поворота закрылка при его наличии. Следует отметить, что определённые известные средства изменения формы гибких объектов, используемые, например, при создании роботов-манипуляторов типа рука или змея и хирургических инструментов, которые могут контролируемо изменять форму и двигаться, как минимум, в 2 степенях свободы внутри тела, также могут быть использованы для изменения формы направляющих или пластин. Первое осуществление изобретения (Фиг.1P) демонстрирует направляющую фиксированной эллиптической формы (1p), поворотно устанавливаемую на концах (2p) своей основной оси, а также линейный привод (3p), устанавливаемый на конструкцию пропеллера и прикрепляемый к указанной фиксированной направляющей (lp) для ее поворота. На радиальных направляющих (5p) ротора (4p) каретки (6p) будут двигаться радиально при вращении ротора, а каретки на направляющих (7p) будут следовать эллиптической направляющей. Каретки направляющей подсоединены к вертикально перемещающимся кареткам (8p) посредством шарнирного соединения (9p). Конструкция такого типа в случае судовых пропеллеров может быть адаптирована для работы в сухой среде, в этом случае каретки 6p, 7p, 8p и шариковое соединение 9p могут быть оснащены центральной смазочной системой подходящего известного типа для обеспечения смазки и отвода лишнего тепла. Альтернативно для судовых пропеллеров данная конструкция может работать в водной среде, где ползуны будут использовать воду для смазки и охлаждения. Где применимо, эта конструкция с каретками, движущимися по направляющим при помощи центральной смазочной системы или при скольжении ползунов по направляющим в водной среде в случае судовых пропеллеров, может также быть использована для других направляющих с изменяемой формой.
Один из упомянутых выше вариантов направляющих, изменяющих форму, включает эластичную изгибаемую направляющую с присоединенным к ней приводом линейного или иного типа, установленным на фиксированную конструкцию ротора, при этом точки соединения привода расположены на предопределенном расстоянии друг от друга на указанной направляющей для изгиба направляющей в необходимую форму, соответствующую требуемой форме орбиты. Однако наше предпочтительное осуществление изобретения такого типа с использованием внешних приводов, формирующих направляющие лопастей, представлено ниже:
Второе осуществление изобретения (Фиг.1) включает линейные приводы (1), установленные на радиальных направляющих ротора (2) и оборудованные запорами (не показаны на фигуре) для подсоединения, когда это необходимо, к кареткам лопастей (3), установленным на радиальной направляющей ротора(4), на которую устанавливаются каретки лопастей, но при этом каждая каретка также может перемещаться (Фиг.2B) по одной изгибаемой направляющей (5), используемой для позиционирования траектории лопасти. Подобным образом лопасти (Фиг.2) могут также опционально использовать каретки для следования направляющей(им) (6), предназначенным для изменения шага лопасти или/или изгиба ее по поперечному сечению (7). Указанные направляющие из этого применения (Фиг.3 A) состоят из сегментов (8), соединенных штыревыми соединениями (9), содержащими тонкий слой электрореологической жидкости между осью (10) и кронштейнами (11), представляющими штыревое соединение. Указанные сегменты (8) состоят из двух частей (12), соединенных штифтами (13) и прикрепленных друг к другу пружиной растяжения (14), которая крепится к обеим частям (12) сегмента. Съемные покрытия (14a), по которым должны перемещаться средства следования, устанавливаются сверху и снизу сборки направляющей. Штифты (13) устанавливаются в отверстия противоположной части сегмента, а пространство между штифтами и стенками отверстий заполняется тонким слоем электрореологической жидкости. Поверхности, на которые наносится электрореологическая жидкость, могут быть гофрированы или иным образом огрублены для повышения адгезии при подаче напряжения и затвердевании жидкости. Кроме того, для указанных выше областей нанесения жидкости необходимо, чтобы их поверхности были способны проводить электроток, что может быть достигнуто покрытием, или изготовлены из электропроводящих материалов, таких как металлическое покрытие или поверхность, которые устанавливаются на электроизолирующий слой, например, покрытие или известный изолирующий материал.
Третий общий тип таких направляющих обладает внутренними средствами коррекции формы, такими как, например, электропривод, встроенный в шарниры, соединяющие сегменты, штифт которого неподвижно подсоединен к одному сегменту, а корпус привода устанавливается на смежный сегмент. Предпочтительное осуществление этого типа (Фиг. 3B) будет включать упругую плоскую сердцевину (15), изготовленную, например, из пружинной стали или, для легких приложений, выполненную, например, из известных типов пластика, используемого для пластиковых пружин. Над и под плоской сердцевинoй (15) установлены крепежные выступы, расположенных на заранее определенных расстояниях относительно друг друга и линейных приводов (16), расположенных между упомянутыми выступами и соединенными с ними таким образом, что это позволит им при активации воздействовать на каждый из соответствующих крепежных выступов. Для целей изменения длины направляющей для возможности формирования различных геометрических форм на заранее определенном расстоянии друг от друга размещаются соединения (17), состоящие из штыревых и гнездовых разъемов (18) с известного типа фиксацией конструкции.
Альтернативно, соединения могут быть расположены вне пределов изгибающих приводов и будут приводиться в движение специальными линейными приводами, которые будут увеличивать или уменьшать рабочую длину соединения при необходимости. Если указанный привод не оснащен встроенным блокировочным механизмом, чтобы удерживать движущийся штифт на одном месте по достижении требуемого положения, необходимо добавить один из известных механизмов блокировки для предотвращения непреднамеренного увеличения или уменьшения его длины. Указанные соединения могут также быть реализованы в виде пассивных средств посредством пружины или другого подходящего эластичного элемента, который будет подтягивать штыревые соединения навстречу друг другу, и блокирующего механизма известного типа для блокировки соединения в требуемом положения по достижении необходимой формы направляющей, что может выполняться как для всей направляющей, так и для ее части.
Другой (Фиг. 3C) подход к данной конструкции включает сегменты, состоящие из двух частей каждый (8a), и (8b) поворотное соединение между сегментами с выдвигаемым соединением между двумя частями каждого сегмента, установленным на двух штифтах с пружиной, подобно примененному во втором осуществлении изобретения. По обе стороны поворотного соединения будут установлены линейные приводы (19), миниатюрные, где это уместно. Вместо приводов могут быть использованы другие средства изменения расстояния между двумя соседними сегментами и их относительной пространственной ориентации (Фиг. 3D), такие как, например, клинья (20), перемещаемые приводами (21) и соединенные штифтом (22) с фиксацией на одном из клиньев (не показаны). В случае, если один из приводов отказывает, указанный блокировочный механизм запускается, соответственно, оставшийся привод будет способен перемещать оба элемента, тем самым обеспечивая резервирование. Вместо клиньев можно использовать, меняющие под воздействием масла или давления сжатого воздуха размер, вставки.
Четвертое осуществление изобретения, представленное на Фиг. 4, представляет собой циклоидный ротор, в состав которого может входить один или более кулачков (23), расположенных по горизонтальной оси, которые определяют траекторию, по которой аэродинамические профили (2а) вращаются вокруг оси ротора.
Кулачки 23, 24 удерживают свои поворотные положения при вращении вала 23а.
Различные области вдоль кулачка 23 или 24 имеют периметр различной формы. Например, одна область кулачка 23 может иметь периметр в форме горизонтально расположенного эллипса или овала. Второй участок кулачка 23 может иметь периметр в форме круга. Третья область кулачка 23 может иметь периметр в форме вертикально расположенного эллипса или овала. Следует отметить, что кулачок 23 или 24 может включать в себя области периметра любой подходящей формы с переходными зонами между ними.
Как показано на Фиг. 4, циклоидный ротор состоит из одной или более жестких опор 24а, связанных с каждым из профилей 2а. Каждая из жестких опор 24а крепится одним концом к соответствующему аэродинамическому профилю 2a, а ролик, размещенный на другом конце, катится по кулачку 23 или 24. Жесткие опоры 24а имеют фиксированную длину и следуют по траектории, определяемой траекторией кулачков, например, направляемых, пружиной сжатия (24b). Для того чтобы облегчить этот процесс, второй конец опоры (может быть) снабжен роликом или любым другим подходящим механизмом. При движении ролика по периметру кулачка и движению кулачка по оси предпочтительно, чтобы ролик мог поворачиваться вокруг своей оси для возможности юстировки с результирующим вектором своего движения относительно штифта.
Согласно нескольким примерам, предусмотрено два кулачка, 23 и 24, каждый расположен по оси соответственно концам аэродинамических профилей 2a. В соответствии с одними модификациями, кулачки 23 и 24 сконструированы для независимого движения относительно друг друга, таким образом, позволяя противоположным концам аэродинамического профиля следовать одной или двум различным траекториям. Следуя другим модификациям, кулачки 23 и 24 предназначены для перемещения в сочетании друг с другом, облегчая тем самым следование предопределенным сочетаниям траекторий для противоположных концов профилей. Согласно этой модификации, кулачки 23 и 24 могут обладать совместно разработанными наборами траекторий на двух концах профилей, некоторые из которых могут быть одинаковыми и некоторые из них могут быть разными.
Пятое осуществление изобретения предназначено для воздушных роторов, скорости вращения которых значительно выше, чем у судовых пропеллеров, и центробежные силы могут вызвать изгиб лопасти и поломку. Это осуществление может быть в целом аналогично вышеуказанным вариантам, но будет включать средства для обеспечения уравновешивающей силы, чтобы противостоять воздействию центробежной силы, воздействующей на лопасть, которая может изогнуть лопасть по длине и сместить ее траекторию. Первый вариант такого осуществления (Фиг.5) для нейтрализации эффектов воздействия центробежной силы предполагает использование механических сопряжений от лопасти (25) к центральному валу (26) либо в одном месте вдоль лопасти, например, в середине, либо с использованием нескольких таких сопряжений, расположенных вдоль более длинных лопастей. Такие механические сопряжения, целью которых является предотвращение внешнего изгиба лопасти, могут быть выполнены гибкими, например, в виде ремней (27) или шнуров, обладающих переменной длиной. Указанные ремни или шнуры наматываются на катушки (27а) с заводной пружиной (не показано), что обеспечивает вариативность длины и повышенное натяжение вместе с увеличением радиуса и, следовательно, центробежной силы. Второй вариант данного осуществления изобретения (не показан) осуществляется при помощи рейки (или зубчатого ремня) и шестерёнки на каждой радиальной направляющей ротора для каждой лопасти, при этом рейка или зубчатый ремень перемещается вдоль радиальной направляющей ротора вместе с лопастью, в то время как шестеренки в соединении с рейкой или ремнем крепятся на вал для позиционирования (возможно, изготовленный из углеродного волокна или аналогичного материала), при этом шестеренка для каждой лопасти устанавливается на и вдоль основной направляющей ротора, желательно на вибропоглощающие опоры. Шестеренку желательно подобрать из известных вариантов типа шестерней с разрезом, подходящих для работы с возвратно-поступательным движением. Третий вариант этого осуществления состоит из пластин, обеспечивающих контактные поверхности, расположенных на лопастях, и изогнутых опор, имеющих форму, совпадающую с формой направляющей, установленной на стойках и динамически регулируемой с помощью линейных приводов, установленных на неподвижных радиальных направляющих ротора вдоль частей траектории, где центробежной силе необходимо обеспечить противодействие, например, на краях эллиптической орбиты. Между контактными поверхностями лопасти и изогнутой опоры вводится воздушная смазка. Указанная воздушная смазка может быть пассивной, такого типа, как встречается в подшипниках с воздушной смазкой, или это может быть поток воздуха, направляемый в зазор между опорой и пластиной посредством перфорированных отверстий в поверхности или пористости материала, из которого изготовлены такие опоры. Четвертая версия осуществления этого изобретения (Фиг. 5А) будет включать легкие петли обмотки с проводами (26m), например, выполненные, из углеродных нанотрубок, размещенных на поверхности каждой лопасти, где необходимо обеспечить уравновешивающую силу, чтобы нейтрализовать действие центробежной силы. Как и в предыдущей версии настоящего осуществления, конструкция стационарного ротора будет использоваться для крепления стойки с регулируемым позиционированием (27m), как описано для предыдущей версии, для поддержки компактного магнита (28m), электрических или постоянных магнитов в сборке Халбаха или высокотемпературного сверхпроводящего электрического магнита. Крепление магнита может эластично поворачиваться или поддерживаться для того, чтобы магнит мог поворачиваться, соответственно, следовать за лопастью, когда сила отталкивания действует на петли обмотки, размещенные на лопасти, и магнит. Есть и четвертая версия данного осуществления изобретения, включающая ролики, установленные на лопасти в месте(ах), где такая поддержка является необходимой, и стационарных направляющих, прикрепленных к конструкции ротора способом, позволяющим динамическую регулировку его положения, как описано для предыдущих версий настоящего осуществления изобретения, вдоль частей траектории, где желательно нейтрализовать центробежную силу.
Шестое осуществление изобретения применимо для воздушных роторов и особенно для воздушных роторов с удлиненной траекторией лопастей. Как известно, работа циклоидного воздушного ротора может быть нарушена порывами ветра. Кроме того, на циклоидные роторы с горизонтально вытянутой траекторией лопастей особенно негативно влияет горизонтальный встречный поток, что приводит к нарушению сложной структуры направления потоков внутри ротора, которые в противном случае существовали бы внутри такого ротора, и вызывает крайне нестабильные и во многом хаотичные потоки внутри такого ротора, значительно снижая его подъемную силу и способствуя дестабилизации ЛА. Для того чтобы предотвратить уменьшение подъемной силы и/или дестабилизацию ЛА, ротор (Фиг. 6) можно защитить обтекателем (28) от встречного потока, в то время как регулируемый воздухозаборник (29) будет направлять воздушный поток на ротор сверху, также возможно введение дополнительных пластин (30) для гарантии надлежащего и упорядоченного распределения потока во впускном отсеке. Для направления потока мимо впускного воздуховода могут быть дополнительно предоставлены обтекатели (28а). Обтекатели (28) могут прикрыть несколько роторов, расположенных последовательно и, как правило, горизонтально в одну линию. При необходимости ротор может быть полностью закрыт с оставленными отверстиями в верхней части для забора воздуха, а в нижней части -- для выхода воздуха; стенки кожуха будут находиться на расстоянии от движущихся лопастей во избежание отрицательного воздействия на работу ротора. Этот ротор обеспечивает подъемную силу, тогда как для создания тяги поток вниз может быть направлен частично нaзaд посредством поворачиваемых и/или изменяющих форму пластин (31). Такие пластины могут быть установлены внутри ротора, особенно если лопасти поддерживаются только одной опорой в середине или если они крепятся на вал, который расположен соосно центральному валу и удерживается, как правило, на одном месте между вращающимся радиальными направляющими ротора, что представляет собой известную конструкцию. Целью этих пластин является управление и оптимизация внутренних потоков, но они могут также быть выполнены в виде аэродинамических профилей или гидродинамических профилей для того, чтобы роторы или пропеллеры могли производить соответствующую полезную подъемную силу или тягу. Поворот и/или корректировка пространственного положения пластин могут быть обеспечены соответствующим поворотными или линейными приводами подобно тому, как это описано для лопастей в патенте США 8540485, или другими известными средствами, а изменение их формы может быть достигнуто теми же средствами, что используются для изгибаемых направляющих, описанных выше для предыдущих осуществлений изобретения, или другими известными средствами, такими, как, например, механизмы, встроенные в манипуляторы типа рука, змея или хирургические инструменты, изгибающиеся внутри тела. Еще один способ обеспечить прямую тягу (Фиг. 6А) -- это наклон удлиненной траектории вперед вместе с защитой ее от встречного потока, что может быть осуществлено наклонением вперед направляющих, используемых для позиционирования и направляющих для других целей, а именно: направляющих, контролирующих шаг лопасти и форму ее поперечного сечения. Обтекатель (Фиг. 6B, 28b), может быть изготовлен полностью открываемым, что будет полезным для использования авторотации ротора, и/или он может быть снабжен крышками (28d и 28с), открываемыми с помощью соответствующих приводов (не показаны) для воздействия встречного потока соответственно на верхние и/или нижние части орбит лопастей, когда это выгодно для конкретных условий эксплуатации. Опционально открывающиеся или закрывающиеся отверстия в обтекателе или кожухе ротора могут быть более конкретно расположены, чтобы обеспечить встречный поток в определенном месте так, чтобы распределение потоков внутри ротора было более выгодным для эффективности ротора. Очевидно, возможно множество вариантов конструкций для установки обтекателей или покрытия роторов и ограждения их от встречного потока, с учетом соответствующих изменений, все они должны считаться в рамках настоящего изобретения. Опционально прямая тяга для данной конфигурации может быть обеспечена тянущим или толкающим ротором/пропеллером или подходящим реактивным двигателем для высокоскоростных СВВП, оснащенных такими роторами.
В седьмом варианте представлены конструкционные решения для использования меньших по размеру и более легких направляющих для контроля шага и формы лопасти, не пролегающих вблизи направляющей, для позиционирования лопасти. Поскольку траектория лопастей и, соответственно, расстояние от указанных направляющих могут варьироваться, решение может быть обеспечено путем преобразованием формы направляющей шага лопасти, обычно обеспечиваемой средствами следования по орбите (32), в поворотное движение валов, которые посредством зубчатых конических передач поворачивают лопасти, таким образом, изменяя их шаг. Такие валы могут быть телескопическими, при этом конические шестерни в соединении с конической шестерней лопасти, размещенной на каретке, движущейся вдоль соединяющего вала, с тем чтобы скорректировать вариативность расстояния между лопастями и направляющей из-за некруговой структуры и изменчивости траектории лопасти. В соответствии с первой версией данного варианта (Фиг.7), изменения формы направляющей шага лопасти (32а), встречающими средствами следования, могут быть преобразованы в поворотное движение посредством шариковой гайки с крупным шагом резьбы (33), установленной на вал (34), так что радиальное возвратно-поступательное движение стержня с резьбой (35), установленного на средство следования, становится поворотным движением вала. Коническая зубчатая шестерня или конический сектор лопасти в соединении с конической зубчатой шестерней могут быть опционально заменены соединением червячного вала, установленного на соединяющем валу, и червячной шестерней или червячным сектором в соединении с ним, устанавливаемым на ось лопасти. Альтернативная конструкция включает направляющую, установленную на рычаге, на другом конце которого зубчатая коническая шестерня, соединенная с зубчатой конической шестерней вала. Другое альтернативное решение использует конструкцию с зубчатой рейкой и шестеренкой, преобразующими радиальное возвратно-поступательное вала в поворотное движение, которое затем посредством зубчатых конических передач, установленных на валу, используется для поворота лопасти, таким образом, изменяя ее шаг. Другая возможность - изменение формы направляющей шага лопасти вне ее плоскости (Фиг. 8, 36) при помощи каждого средства следования на рычаге (37), установленной на соединяющем телескопическом валу и поворачивающей его во время следования направляющей. Решения для поперечного изгиба лопастей можно реализовать подобным же образом, используя поворотный вал, только вместо поворота лопасти он будет подвергнут линейным силам и, соответственно, поворотное движение вала будет преобразовано в возвратно-поступательное движение с помощью известных механизмов, миниатюрных, где это уместно, например, коленчатого вала или реечной пары и т.д. Очевидно, существует множество способов реализации преобразования изменения формы направляющей в поворотное движение, которое затем передается лопасти с целью изменения шага или изгиба по поперечному сечению, и с соответствующими изменениями все они считаются в пределах объема и целей данного изобретения.
Следует отметить, что, особенно для осуществлений с гибкими направляющими, может быть полезно использовать направляющие, определяющие шаг лопасти и ее траекторию попеременно для смены эффективных точек поворота и/или перемещения виртуальной точки поворота вдоль хорды, где это необходимо. Например, если при перемещении лопасти и при том, что направляющая, по которой движется лопасть, существенно не меняет направление, в то время как другая направляющая меняет, ролики первой лопасти становятся поворотной точкой на этот момент. Если обе направляющее меняют движение при перемещении лопасти, но меняют направление в разной степени, виртуальная поворотная точка формируется в соответствии с таким относительным смещением по хорде. Для такого расположения направляющих, которое позволит использование пронации и супинации лопасти в полном объеме и смещение точки поворота по точкам траектории, где это будет необходимо, желательно разместить ролики или другие средства следования далее по хорде. Конечно, такого рода применение может включать перемещение центра масс поперечного сечения лопасти, что система управления должна будет учитывать для определения радиального положения и/или траектории противовесов.
В соответствии с вышеуказанным, циклоидный ротор настоящего изобретения может также включать контроллер (не показано) для прямого управления различными его элементами.
Специалисты, для которых предназначено настоящее изобретение, несомненно оценят тот факт, что многочисленные изменения, вариации и модификации могут быть сделаны в рамках объема и целей изобретения с соответствующими изменениями.
6. Фигуры и диаграммы.
Предоставляются отдельно
7. Применение.
Первое осуществление, использующее фиксированную поворачиваемую направляющую, будет работать следующим образом. На радиальных направляющих (5p) ротора (4p) каретки, установленные на направляющих, (6p) будут двигаться радиально при вращении ротора, а каретки направляющих (7p) будут следовать эллиптической направляющей (lp). Когда линейный привод (3p) приходит в движение, он поворачивает фиксированную эллиптическую направляющую (lp), и проекция этой направляющей на горизонтальную поверхность, определяющая траекторию лопастей, принимает другую эллиптическую форму с той же длиной своей большой оси, но измененной длиной своей малой оси, что, соответственно, изменяет аэродинамические или гидродинамические характеристики траектории лопасти для соответствия изменению режима работы. Если конструкция такого типа в случае судовых пропеллеров адаптирована для работы в сухой среде, в этом случае каретки 6p, 7p, 8p и шариковое соединение 9p могут быть оснащены центральной смазочной системой подходящего типа для обеспечения смазки и отвода лишнего тепла. Альтернативно для судовых пропеллеров данная конструкция может работать в водной среде, где ползуны будут использовать воду для смазки, как, например, для аквапланирования, и в то же время для охлаждения.
Второе осуществление изобретения (Фиг. 1) предполагает динамическое изменение радиального положения лопастей посредством контролируемых компьютером приводов во время переходного этапа работы ротора, таким образом, меняется и их траектория движения, в то время как каждая лопасть также движется и изгибает направляющую (5), содержащую электрореологическую жидкость в шарнирах (10) и выдвигающихся валах (13), которая по достижении необходимой траектории вращения и соответствующей формы направляющей и поступлении напряжения мгновенно застывает, что делает направляющую жесткой. Приводы (1) при этом отсоединяются до того момента, пока не будет необходимо снова изменить орбиту.
Подобным же образом (Фиг. 2) когда направляющая (6) из первого осуществления используется для изменения шага лопасти, такое изменение шага выполняется приводами (не показано). Направляющая шага лопасти (6) с шарнирами, содержащими электрореологическую жидкость, фиксируются способом, описанным выше. Как только желаемая форма направляющей шага лопасти достигнута, системой управления подается напряжение, указанная направляющая практически мгновенно застывает, и приводы отсоединяются.
В третьем варианте первого осуществления изобретения (Фиг. 3B) специальные приводы воздействуют на относительное движение выдвигаемых соединений (18), тем самым меняя длину направляющей, в то время как линейные приводы (16) изгибают плоскую сердцевину по длине (15) между точками крепления с указанной вариативностью длины и количеством изгибов, а также временной последовательностью изменений, определяемой системой управления в целях достижения необходимой формы направляющей, и поэтому, в зависимости от целей указанной направляющей, достигается требуемая траектория движения лопасти, ее шаг, изгиб или поворот закрылка. Аналогично во второй версии второго варианта осуществления изобретения (Фиг. 3D) линейный привод в первую очередь изменяет рабочую длину соединений, а затем по команде системы управления соединение блокируется, после чего приводы выдвигаются или втягиваются для того, чтобы осуществить изгибание плоской сердцевины (15) внутри соответствующих пролетов и тем самым достичь общей смены формы направляющей, требуемой системой управления для достижения ее функциональных целей, как было описано выше для первого варианта осуществления. Во втором осуществлении изобретения средства изменения расстояния между сегментами выполняют две задачи: путем их дифференцированной активации изменение относительного пространственного позиционирования каждого из двух соседних сегментов контролируются системой управления, а указанные средства изменения расстояния в сочетании с выдвиганием или втягиванием привода удлиняют или укорачивают направляющую в сочетании с изменением указанного пространственного позиционирования сегментов, что приводит к получению новой формы направляющей. Средства изменения расстояния, представленные выше в разделе Описание, включают приводы, клиновидные элементы, перемещающиеся, как правило, поперек пролета направляющей, изменяя расстояние между контактными поверхностями соседних сегментов, используемых для изменения расстояния между сегментами, надувными элементами, работа которых похожа на действие приводов (19) между сегментами.
В четвертом осуществлении изобретения для изменения формы траектории профилей 2а, вращающихся вокруг оси ротора во время работы ротора, кулачки 23 и 24 перемещаются в продольном направлении оси, чтобы изменить форму периметра, который находится в контакте с роликами, установленными на жесткие опоры 24а. Выбирая сечение каждого из кулачков 23 и 24, которые находятся в контакте с роликами, можно регулировать форму орбиты профилей 2а, вращающихся вокруг оси ротора. Для облегчения продольного перемещения кулачков 23 и 24 может быть использован линейный привод (не показан) или любой другой подходящий механизм.
Пятое осуществление изобретения в первом варианте предполагает преобразование движения каретки лопасти при помощи реечной пары в поворотное движение для позиционирования вала, что приведет к размотке или намотке ремня/шнура на катушке, таким образом гарантируя, что длина указанного ремня/шнура всегда точно соответствует радиальному положению лопасти, таким образом, предотвращая изгиб лопасти наружу из-за воздействия центробежной силы. Во втором варианте перемещение контактной поверхности лопасти с воздушной смазкой по изогнутой опоре обеспечит предотвращение прогиба наружу лопасти. В третьем варианте магнит будет вызывать в петлях обмотки при приближении к лопасти токи, которые в свою очередь образуют магнитное поле, репульсивно взаимодействуя с магнитным полем магнита. Кроме того, магнит будет, в зависимости от типа поддерживающей конструкции, поворачиваться или наклоняться, тем самым, сопровождая движение лопасти и продолжая отталкивать обмотку лопасти и, соответственно, лопасть, на которой они размещены, таким образом, предотвращая ее прогиб наружу и нейтрализуя воздействие центробежной силы. В четвертом варианте ролики на лопасти будут перемещаться по направляющим, установленным на участках траектории, где центробежная сила сильнее всего, тем самым предотвращая изгиб лопасти наружу и нейтрализуя воздействие центробежной силы.
В шестом варианте передний обтекатель или кожух ротора позволит предотвратить возмущающее воздействие порывов ветра и/или встречного потока, тем самым, обеспечивая сохранение подъемной силы и предотвращая дестабилизацию ЛА. Следует отметить, что ротор в этом варианте осуществления работает как бы в режиме зависания, и ключевой параметр циклоидного ротора -- рацио продвижения --- не применим. Кроме того, его лопасти не очерчивают бесконечную циклоидную кривую, относительно встречного потока, но, как правило, следуют орбите с замкнутым контуром или иной формы. Заборные пластины, регулируемые системой управления или оператором, обеспечивают однородность и упорядоченность входного потока, в то время как пластины контроля выходного потока используются для создания тяги вперед или поворота. Пластины внутри ротора помогают контролировать и оптимизировать потоки внутри ротора, и если они представлены в виде аэро- или гидропрофилей, их можно использовать для создания подъемной силы или тяги соответственно.
Применение ротора из седьмого варианта было адекватно описано в разделе Описание и не будет изложено здесь повторно, но включено посредством ссылки.
В заключение необходимо отметить, что циклоидный ротор или пропеллер настоящего изобретения может быть использован для различных видов применений, включая, но не ограничиваясь следующими: ЛА типа СВВП, дирижабли, пропеллеры для судов, различные подводные аппараты с пропеллерами, аэроглиссеры, снегоходы, ветрогенераторы и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОДЫ С ПОСТОЯННОЙ ЛИНЕЙНОЙ СКОРОСТЬЮ ЛОПАСТЕЙ ДЛЯ ЦИКЛОИДНЫХ РОТОРОВ И ГРЕБНЫХ ПРОПЕЛЛЕРОВ С НЕКРУГОВЫМИ ОРБИТАМИ | 2024 |
|
RU2828914C1 |
| ЛОПАСТЬ ЦИКЛОИДНОГО РОТОРА ИЛИ ЦИКЛОИДНОГО ПРОПЕЛЛЕРА С ДИНАМИЧЕСКОЙ ОПТИМИЗАЦИЕЙ ФОРМЫ И ДРУГИХ ПАРАМЕТРОВ В ПРЕДЕЛАХ ОДНОГО ОБОРОТА | 2017 |
|
RU2772353C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВОЗДУШНОГО ПОТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2016 |
|
RU2702814C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2682954C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ПОТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ КРЫЛА И УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2014 |
|
RU2589569C2 |
| Циклический движитель летательного аппарата вертикального взлета и посадки | 2022 |
|
RU2778181C1 |
| САМОЛЕТ С ВЫДВИЖНЫМИ ЦИКЛОИДНЫМИ ДВИЖИТЕЛЯМИ | 1994 |
|
RU2090453C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ВЕТРА НА ЛЕТАЮЩЕЙ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКЕ | 2018 |
|
RU2697075C1 |
| ИМПУЛЬСНЫЙ ЛОКОМОТОР | 2015 |
|
RU2659666C1 |
| САМОЛЕТ-АМФИБИЯ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 1994 |
|
RU2125524C1 |
Циклоидный ротор содержит множество лопастей, установленных для следования в общем некруговой направляющей, средства изменения указанной направляющей, выполненные с возможностью перехода между множеством форм направляющих; средства регулирования шага лопасти для регулирования угла атаки лопасти, средства, обеспечивающие динамический противовес для лопасти для обеспечения того, что ротор остается сбалансированным. Предусмотрены приводные средства, обеспечивающие движение лопастей по направляющей. Способ формирования подъемной или пропульсивной силы включает обеспечение циклоидного ротора лопастями, устанавливаемыми на некруговую направляющую, обладающую средствами изменения формы направляющей для движения по соответствующей некруговой орбите; обеспечение автоматизированной системы управления, оперативно подсоединяемой к средствам изменения формы направляющей для контроля положения средств удержания лопастей и приводов для изменения угла атаки лопастей; обеспечение механизма привода для движения лопастей по направляющей; вращение лопастей по орбитам на скорости, подходящей для формирования подъемной или пропульсивной силы. Предусмотрено управление автоматизированной системой управления для активации приводов, ответственных за изменение угла атаки относительно положения лопасти на направляющей, и средств изменения формы направляющей для достижения оптимальной траектории движения лопасти. Группа изобретений направлена на исключение проблем со стабильностью при горизонтальном полете ЛА по причине набегающего потока, нарушающего потоки, производимые внутри ротора. 2 н. и 18 з.п. ф-лы, 8 ил.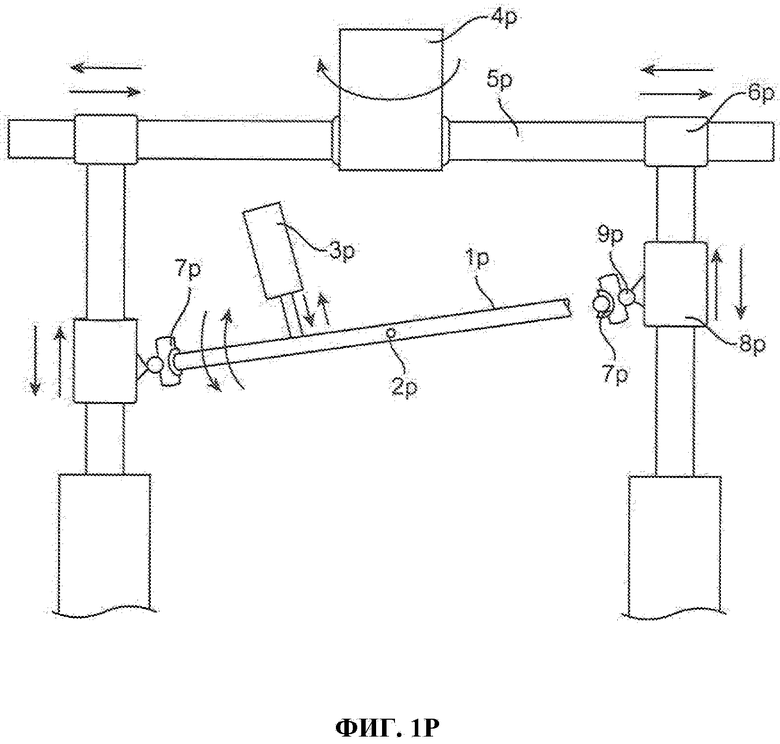
1. Циклоидный ротор, содержащий множество лопастей, установленных для следования в общем некруговой направляющей, средства изменения указанной направляющей, выполненные с возможностью перехода между множеством форм направляющих; средства регулирования шага лопасти для регулирования угла атаки лопасти, средства, обеспечивающие динамический противовес для лопасти для обеспечения того, что ротор остается сбалансированным, а также приводные средства, обеспечивающие движение лопастей по указанной направляющей.
2. Ротор по п. 1, где указанная направляющая в общем некруговой формы является изгибаемой, а средства ее изменения содержат приводные средства для ее изгибания до тех пор, пока она не достигнет формы, соответствующей требуемой орбите лопастей.
3. Ротор по п. 2, где указанные приводные средства являются линейными приводами для позиционирования указанной изгибаемой направляющей радиально относительно оси вращения ротора.
4. Ротор по п. 2, где указанная изгибаемая направляющая содержит умный материал, который застывает при активации средств контроля, что делает указанную направляющую жесткой.
5. Ротор по п. 1, где указанная направляющая является изгибаемой, а указанные средства изменения ее формы включают средства для изгибания направляющей.
6. Ротор по п. 5, где указанные средства для изгибания направляющей включают части направляющей, изменяющие их размеры.
7. Ротор по п. 5, где средства для изгибания указанной направляющей включают средства изменения углового положения частей направляющей относительно друг друга.
8. Ротор по п. 1, где указанный ряд форм направляющей находится в средствах выбора форм направляющей.
9. Ротор по п. 8, где средства выбора форм направляющей представляют собой варьируемый кулачковый механизм.
10. Ротор по п. 9, где указанный механизм состоит из ряда форм направляющих, расположенных вдоль кулачкового вала, вокруг которого движутся средства следования, оперативно соединенные с лопастями.
11. Ротор по п. 10, где указанное относительное положение кулачка к средствам следования изменяется средствами позиционирования, запускаемыми для изменения относительного положения до тех пор, пока не будет достигнута форма направляющей, соответствующая требуемой форме орбиты.
12. Ротор по п. 11, где указанные средства следования включают накладки, оперативно соединенные с лопастями и удерживаемые над поверхностью указанной направляющей слоем воздуха, поступающего в зазор между поверхностью направляющей и накладкой, а средствами позиционирования являются линейные приводы.
13. Ротор по п. 11, где указанная поверхность кулачка является непрерывной по своей рабочей длине, а указанные средства следования включают ролики, оперативно соединенные с лопастями, при этом ролики поворачиваются в направлении вектора своего движения относительно вала для того, чтобы адаптироваться к движению вала по оси во время вращения вокруг него.
14. Ротор по п. 1, включающий каретки, устанавливаемые на направляющую и оперативно соединенные с валами лопастей, указанная направляющая может быть наклонена по своей большой оси, что изменит проекцию ее формы на плоскость, по которой движутся лопасти, соответственно, изменится и форма их орбиты.
15. Ротор по п. 1, дополнительно включающий ограждающие средства для предотвращения попадания встречного воздушного потока внутрь ротора.
16. Ротор по п. 15, где указанные средства ограждения дополнительно включают средства для ограниченного и специально локализованного допуска встречного воздушного потока, если это улучшает эффективность ротора.
17. Ротор по п. 15, где указанные средства ограждения представляют собой обтекатель ротора с отверстием сверху для поступления воздуха и снизу для выхода воздушного потока.
18. Ротор по п. 1, дополнительно содержащий пластины как средства контроля воздушного потока, возникающего внутри ротора.
19. Ротор по п. 1, где дополнительно включает средства противодействия центробежной силе лопасти.
20. Способ формирования подъемной или пропульсивной силы включает:
а) обеспечение циклоидного ротора лопастями, устанавливаемыми на некруговую направляющую, обладающую средствами изменения формы направляющей для движения по соответствующей некруговой орбите;
b) обеспечение автоматизированной системы управления, оперативно подсоединяемой к указанным средствам изменения формы направляющей для контроля положения средств удержания лопастей и приводов для изменения угла атаки лопастей;
c) обеспечение механизма привода для движения лопастей по указанной направляющей;
d) вращение лопастей по орбитам на скорости, подходящей для формирования подъемной или пропульсивной силы; а также
е) управление автоматизированной системой управления для активации приводов, ответственных за изменение угла атаки относительно положения лопасти на указанной направляющей, и средств изменения формы направляющей для достижения оптимальной траектории движения лопасти, в соответствии с указаниями, данными системой управления или оператором, а также в ответ вводу исходных параметров, обеспечиваемых средствами ввода исходных данных, таким образом, ротор будет обладать требуемой эффективностью, обеспечивая необходимую подъемную или пропульсивную силу.
| US 20090226314 A1, 10.09.2009 | |||
| US 20010036406 A1, 01.11.2001 | |||
| RU 2060203 C1, 20.05.1996. |

