Уровень техники в области изобретения
Изобретение относится к получению основ, в частности, прозрачных подложек из стекла или органического полимерного материала, покрытых на по меньшей мере одной стороне системой тонких слоев.
Обычно подложки, в частности, подложки из стекла или органического полимерного материала, снабжают покрытиями, которые придают им особые свойства, в частности, оптические свойства, например, способность отражать или поглощать излучение в заданном диапазоне длин волн, электропроводящие свойства или же свойства, связанные с легкостью очистки или способностью подложки к самоочищению. Эти покрытия обычно представляют собой систему тонких слоев на подложке неорганических соединений, в частности, металлов, оксидов, нитридов или карбидов. В контексте изобретения тонким слоем называется слой, толщина которого меньше одного микрона и обычно составляет от нескольких нанометров до нескольких сотен нанометров, поэтому он и называется "тонким".
Тонкослойную систему обычно получают путем последовательного осаждения тонких слоев, осуществляемого в нескольких камерах линии осаждения (типично от 20 до 30 камер), причем эти осаждения проводят в разных камерах, применяя один или более способов осаждения, таких, в частности, как катодное напыление с поддержкой магнитного поля, называемое также магнетронным напылением, ионно-лучевое осаждение (ion-beam assisted deposition, IBAD), испарение, химическое осаждение из паровой фазы (chemical vapor deposition, CVD), плазмохимическое осаждение из паровой фазы (plasma-enhanced chemical vapor deposition, PECVD) и/или химическое осаждение из паровой фазы при низком давлении (LPCVD, от low-pressure CVD).
К сожалению, камеры в линии осаждения часто являются грязными, и частицы пыли или мусора, присутствующие в некоторых камерах, могут беспорядочно падать на подложку, когда она проходит через эти камеры. Некоторые частички мусора могут оставаться на поверхности подложки (более точно, на поверхности тонкого слоя, осажденного в рассматриваемой камере) и затем действовать как маска при последующих осаждениях тонких слоев. Этот мусор является причиной дефектов, снижающих качество тонкослойной системы, осажденной на подложку, и может оказаться неприемлемым в зависимости от предполагаемого применения изготовленной этим способом подложки с покрытием.
Для контроля качества изготовленной подложки с покрытием в современном уровне техники применяются системы оптического контроля, которые предусмотрены для размещения на выходе линии осаждения и которые способны выдавать различные изображения тонкослойной системы, осажденной на поверхности подложки. Эти системы оптического контроля обычно оборудованы стендом, содержащим ряд оптических датчиков (видеокамер) и несколько источников излучения разных длин волн, что позволяет получать изображения в различных конфигурациях (например, изображения, снятые в отражении, в пропускании и т.д.). Анализ этих изображений позволяет обнаружить возможные дефекты тонкослойной системы, полученной в линии осаждения.
Хотя предлагаемые в настоящее время системы контроля позволяют обнаруживать дефекты, они не дают никакой информации о происхождении этих дефектов. В том же время знание об этом происхождении может оказаться очень ценным с точки зрения проведения быстрых и ориентированных операций по техобслуживанию на линии осаждения.
Предмет и сущность изобретения
В частности, изобретение позволяет смягчить недостатки предшествующего уровня техники, предлагая способ локализации в линии осаждения, содержащей последовательность камер, источника дефектов тонкослойной системы, осажденной на подложку в указанных камерах, причем каждый тонкий слой материала осаждается в одной или более последовательных камер линии осаждения, и частицы мусора, оставшиеся на поверхности тонкого слоя, осажденного в камере, действуют как маски при последующих осаждениях тонких слоев и являются источником дефектов, причем указанный способ включает:
- стадию получения по меньшей мере одного изображения, показывающего указанный дефект, полученного по меньшей мере одной системой оптического контроля, размещенной на выходе линии осаждения,
- стадию определения, исходя из указанного, по меньшей мере одного, изображения, признака дефекта, причем этот признак включает по меньшей мере одну репрезентативную характеристику дефекта, и
- стадию идентификации по меньшей мере одной камеры линии осаждения, ответственной за происхождение дефекта, исходя из признака дефекта и используя эталонные признаки, ассоциированные с камерами линии осаждения.
Соответственно, изобретение относится также к устройству локализации источника дефекта тонкослойной системы, осажденной на подложку во множестве камер, следующих друг за другом в линии осаждения, где каждый тонкий слой материала осаждается в одной или более последовательных камерах линии осаждения, и частицы мусора, остающиеся на поверхности тонкого слоя, осажденного в камере, действуют как маски при последующих осаждениях тонких слоев и являются источником дефектов, причем указанное устройство содержит:
- модуль получения по меньшей мере одного изображения, показывающего указанный дефект, полученного по меньшей мере одной системой оптического контроля, размещенной на выходе линии осаждения,
- модуль определения, исходя из указанного, по меньшей мере одного, изображения, признака дефекта, причем этот признак включает по меньшей мере одну репрезентативную характеристику дефекта, и
- модуль идентификации по меньшей мере одной камеры линии осаждения, ответственной за происхождение дефекта, исходя из признака дефекта и используя эталонные признаки, ассоциированные с камерами линии осаждения.
Таким образом, изобретение предлагает простое и эффективное решение для локализации в линии осаждения источника дефекта тонкослойной системы, осажденной на подложку.
В контексте изобретения осаждение тонкослойной системы на подложку проводится путем последовательного проведения подложки через разные камеры линии осаждения, находящиеся в контролируемой атмосфере. В частности, осаждение всей тонкослойной системы на подложку осуществляется без воздействия на подложку открытого воздуха или без очистки подложки между двумя камерами. Таким образом, кусочки мусора, которые падают на подложку в одной камере линии осаждения, остаются на поверхности тонкого слоя, осажденного в этой камере, и действуют как маски при последующем осаждении тонких слоев, тем самым создавая дефекты. Таким образом, изобретение позволяет идентифицировать небольшое число камер линии осаждения или даже единственную камеру, которая может быть источником дефектов, детектируемых на выходе линии осаждения.
Для этого оценивают эталонный признак, ассоциированный с данной камерой линии осаждения, на подложке осаждения тонкослойной системы, осуществляемого путем проведения подложки через все камеры линии осаждения в присутствии по меньшей мере одного типа мусора, создаваемого в указанной камере. Другими словами, в контексте изобретения эталонный признак, ассоциированный с данной камерой, получают в условиях образования всей тонкослойной системы и, из-за присутствия кусочка мусора, происходящего из указанной камеры, некоторые тонкие слои могут локально отсутствовать в системе. За пределами размещения кусочка мусора, на подложкеподложке присутствуют все тонкие слои системы, для определения эталонного признака.
В одном варианте осуществления изобретения тонкие слои осаждают на подложку в линии осаждения, используя способ катодного напыления с поддержкой магнитного поля, называемого магнетронным напылением. В таком случае каждая камера линии осаждения содержит распыляемую мишень, находящуюся под отрицательным напряжением, называемую катодом, содержащую химические элементы, подлежащие осаждению, и вблизи которой создается плазма в глубоком вакууме. Активные компоненты плазмы, бомбардируя мишень, выбивают химические элементы из мишени, которые осаждаются на подложку, образуя желаемый тонкий слой. Этот процесс называется реактивным, когда тонкий слой состоит из материала, образующегося в результате химической реакции между элементами, выбитыми из мишени, и газа, содержащегося в плазме. Одно преимущество способа магнетронного напыления заключается в том, что он позволяет осадить в одной и той же линии осаждения очень сложную систему слоев, последовательно проводя подложку под разными мишенями.
В контексте изобретения в осаждении тонкого слоя одного и того же материала в заданных пропорциях может участвовать несколько последовательных камер линии осаждения. Предпочтительно, в случае, когда дефект присутствует в тонком слое одного и того же материала, осажденном в нескольких последовательных камерах линии осаждения, изобретение позволяет идентифицировать одну или несколько камер среди всех камер, участвующих в осаждении этого тонкого слоя, как источник дефекта.
В случае линии осаждения путем магнетронного напыления параметризация различных камер, в которых проводится осаждение тонких слоев, включает подбор различных параметров магнетронного напыления, таких, в частности, как давление газа и его состав, мощность, прикладываемая к катоду, угол падения бомбардирующих частиц, толщина осаждения и т.д.
Подложка предпочтительно представляет собой лист из минерального стекла или органического полимерного материала. Она предпочтительно является прозрачной, бесцветной или окрашенной. Стекло предпочтительно является натриево-кальциевым-силикатным стеклом, но этом может быть также, например, боросиликатное или aлюмоборосиликатное стекло. Предпочтительными органическими полимерными материалами являются поликарбонат, полиметилметакрилат, полиэтилентерефталат (PET), полиэтиленнафталат (PEN) или же фторполимеры, такие, как этилен тетрафторэтилен (ETFE). Подложка может быть жесткой или гибкой. Подложка может быть плоской или изогнутой.
Предлагаемое изобретением решение основано на использовании цифровых изображений, полученных в результате оптического контроля, обычно осуществляемого на выходе линии осаждения. Согласно изобретению, эти изображения анализируются с целью извлечения признака дефекта, содержащего одну или несколько заданных характеристик, репрезентативных для дефекта, и анализ этих характеристик позволяет идентифицировать камеры линии осаждения, которые могут быть источником дефекта. Для этого признак дефекта сравнивается, напрямую или опосредовано (например, с помощью одного или более дерева решений) с различными эталонными признаками, которые были сформированы для каждой камеры линии осаждения и которые содержат те же характеристики, что и признак дефекта. Эталонный признак, ассоциированный с камерой, представляет собой значения заданных характеристик дефекта, возникающего в этой камере. Его можно, например, получить экспериментально, постукивая по стенкам камеры, чтобы создать в каждой камере частички мусора в результате этого постукивания, а также получить путем моделирования или расчетов. Следует отметить, что с каждой камерой линии осаждения может быть ассоциировано несколько эталонных признаков. Аналогично, каждый эталонный признак не обязательно соответствует единственной точке, но может соответствовать интервалу значений, участку кривой, сегменту поверхности и т.д., в зависимости от числа компонентов, содержащихся в эталонном признаке.
Анализ признака дефекта с учетом эталонных признаков, ассоциированных с различными камерами линии осаждения, позволяет идентифицировать небольшое число камер линии осаждения или даже единственную камеру, которая может быть источником дефекта.
Так, например, в одном частном варианте осуществления стадия идентификации включает этап сравнения признака дефекта с совокупностью эталонных признаков, ассоциированных с каждой камерой линии осаждения, причем указанная, по меньшей мере одна, камера, идентифицированная как способная быть источником дефекта, ассоциируется с эталонным признаком, соответствующим признаку дефекта. Другими словами, одна или несколько камер, идентифицированные как возможные источники дефекта, являются в этом случае камерами, эталонные признаки которых наиболее близки к признаку дефекта, в смысле, например, заданного расстояния или, эквивалентно, заданной погрешности предсказания.
Изобретение может с успехом применяться к различным тонкослойным системам, которые можно осадить на подложку, в частности, прозрачную подложку и, в частности, к тонкослойной системе, образующей интерференционную систему. Выбор одной или более характеристик признака дефекта, использующегося в контексте изобретения, производится в зависимости от оптических свойств рассматриваемой тонкослойной системы, в частности, от ее способности отражать или пропускать излучение, а также от типа изображений, выдаваемых системой оптического контроля (изображения, сделанные в отражении, в пропускании, полученные с источниками излучения, способными излучать в различных диапазонах длин волн, и т.д.).
В качестве примеров тонкослойных систем, которые можно осадить на подложку и исследовать согласно изобретению, можно упомянуть, без ограничений:
- тонкослойные системы, которые изменяют отражательные свойства подложки в диапазоне длин волн видимого излучения, такие, как отражательные металлические слои, в частности, на подложке металлического серебра, которые используются для получения зеркал, или же противоотражательные покрытия, которые предназначены для уменьшения отражения излучения на границе раздела между воздухом и основой. Противоотражательное покрытие может быть образовано, в частности, тонкослойной системой, имеющей поочередно более низкий и более высокий показатели преломления, играющие роль интерференционного светофильтра на границе раздела между воздухом и основой, или же тонкослойной системой, создающей непрерывный или ступенчатый градиент показателя преломления между показателем преломления воздуха и показателем преломления подложки;
- тонкослойные системы, которые придают подложке способность отражать инфракрасное излучение, такие, как прозрачные системы, содержащие по меньшей мере один тонкий металлический слой или по меньшей мере один тонкий слой на подложке прозрачного проводящего оксида (TCO), называемый функциональным слоем, в частности, на основе серебра, ниобия, хрома, сплава никеля и хрома (NiCr), смешанного оксида индия-олова (ITO), и покрытия, находящиеся по обе стороны от каждого функционального слоя, образуя интерференционную систему. Эти прозрачные тонкослойные системы, способные отражать инфракрасное излучение, используются для получения остеклений с контролируемым солнечным излучением, в частности, солнцезащитных остеклений, которые предназначены для снижения количества входящей солнечной энергии, или низкоизлучательных остеклений, предназначенных для снижения количества энергии, рассеиваемой наружу здания или транспортного средства;
- тонкослойные системы, придающие подложке электропроводящие свойства, такие, как прозрачные системы, содержащие по меньшей мере один тонкий металлический слой, в частности, на основе серебра, или тонкий слой на основе прозрачных проводящих оксидов (TCO), например, на основе оксид индия-олова (ITO), на основе смешанного оксида индия-цинка (IZO), на основе оксида цинка, легированного галлием или алюминием, на основе оксида титана, легированного ниобием, на основе станната кадмия или цинка, на основе оксида олова, легированного сурьмой и/или фтором. Эти покрытия с электропроводящими свойствами используются, в частности, в обогреваемых остеклениях, в которых электрический ток течет через покрытие, создавая тепло посредством омического нагрева, или же в качестве электрода в многослойных электронных устройствах, в частности, в качестве прозрачного электрода, расположенного на передней стороне устройств с органическими светоизлучающими диодами (OLED), фотогальванических устройств, электрохромных устройств и т.д.;
- тонкослойные системы, которые придают подложке способность к самоочищению, такие, как прозрачные системы на основе оксида титана, которые облегчают разложение органических соединений под действием ультрафиолетового излучения и удаление минеральной грязи под действием струек воды;
- тонкослойные системы, которые придают подложке противоконденсатные свойства, гидрофобные свойства и т.д.
Указанные одна или более характеристик, выбранных для образования признака дефекта, предпочтительно имеют значение, которое меняется в зависимости от камер, участвующих в осаждении тонкослойной системы, чтобы позволить легко идентифицировать камеру, в которой образуется дефект в этой тонкослойной системе. Например, можно выбрать одну характеристику, значение которой является строго монотонной (т.е., возрастающей или убывающей) функцией толщины осаждения на подложку, чтобы значение этой характеристики в признаке дефекта позволяло идентифицировать толщину осаждения, на которой появился указанный дефект. Зная эту толщину и камеру, ответственную за осаждение тонкого слоя, соответствующего этой толщине, можно легко определить камеру, в которой возник дефект. Такой выбор строго монотонной характеристики как функции толщины осаждения на подложку особенно выгоден, так как он позволяет из признака, содержащего единственную удачно выбранную характеристику, идентифицировать единственную камеру, которая может быть источником дефекта.
Однако однозначная связь между значением каждой характеристикой признака и камерой линии осаждения не является существенным условием изобретения, другими словами, не требуется, чтобы каждой камере соответствовало свое определенное значение каждой характеристики. Действительно, при рассмотрении одной заданной характеристики между двумя или более камерами может оставаться неопределенность или отклонение. В частности, одно и то же значение характеристики может соответствовать двум разным камерам линии осаждения.
Действительно, следует отметить, прежде всего, что даже в том случае, когда остается неопределенность, изобретение позволяет резко уменьшить число камер, подозреваемых в том, что они являются источником дефекта. Как упоминалось выше, при осаждении тонкослойной системы на подложку линия осаждения вполне может содержать 20 или даже 30 камер. Изобретение позволяет ограничить число камер, для которых остается неопределенность, т.е., хорошо выбрав характеристики, максимум до двух или трех камер. Кроме того, можно еще больше уменьшить это число, учитывая несколько характеристик в признаке дефекта, множественность характеристик позволяет устранить остаточную неопределенность.
Следует отметить, что характеристики, принимаемые во внимание для образования признака дефекта, могут зависеть от природы изображений, сделанных и выдаваемых оптическими системами (например, изображения, снятые в отражении или в пропускании, типы источников излучения, использовавшееся для создания изображений, и т.д.). Использование изображений разного типа может с успехом позволить устранить вышеупомянутые неопределенности благодаря использованию различных дополнительных характеристик, извлеченных из каждого типа изображения, чтобы сформировать признак дефекта.
Указанное, по меньшей мере одно, изображение, показывающее дефект, может представлять собой, в частности, полутоновое изображение, RGB-кодированное изображение (кодированное в основных цветах red-green-blue) и/или гиперспектральное изображение.
Так, в качестве иллюстрации, в одном частном варианте осуществления указанное, по меньшей мере одно, изображение может включать полутоновое изображение, снятое в отражении, и полутоновое изображение, снятое в пропускании.
Этот вариант осуществления может предпочтительно, но без исключений, применяться, когда тонкослойная система содержит множество слоев с низким коэффициентом излучения. Использование информации, извлеченной из изображения, полученного в пропускании, в дополнение к информации, извлеченной из изображения, полученного в отражении, позволяет получить признак, содержащий больше характеристик, что позволяет с большей точностью локализовать источник дефекта тонкослойной системы.
В другом варианте осуществления указанное, по меньшей мере одно, изображение может включать два полутоновых изображения (сделанных в отражении и/или пропускании), полученных указанной, по меньшей мере одной, оптической системой с использованием двух источников излучения, излучающих в двух, по меньшей мере частично отличающихся, диапазонах длин волн, в частности, одного источника излучения, излучающего в диапазоне длин волн видимого света, и одного источника излучения, излучающего в инфракрасном диапазоне длин волн. Комбинация изображений, полученных при использовании двух разумно выбранных источников излучения, излучающих на разных длинах волн, может позволить устранить неопределенность.
Действительно, некоторые тонкослойные системы могут иметь строго монотонные характеристики в инфракрасном диапазоне в зависимости от толщины осажденного слоя, что данный вариант осуществления позволяет с успехом эксплуатировать.
Таким образом, изобретение позволяет провести целевое обслуживание линии осаждения, фокусируя операции по техобслуживанию (и, в частности, операции чистки) или, в более общем смысле, корректирующие воздействия на нескольких идентифицированных камерах или даже на единственной камере. Такие корректирующие воздействия типично могут состоять в постукивании по стенкам каждой идентифицированной камеры, чтобы очистить их от возможных покрывающих стенки частиц пыли и мусора, которые способны осаждаться на подложку во время осаждения тонкого слоя, осуществляемого в этой камере. Эти операции по техобслуживанию могут иметь место либо во время производства, или по окончании производства.
Таким образом, изобретение позволяет более точное и более эффективное вмешательство в линию осаждения при одновременном ограничении соответствующих расходов. Кроме того, благодаря изобретению идентификация одной или более камер, которые были источником дефектов, является очень быстрой. В результате, когда обнаруживается появление дефектов на подложках с покрытием, выходящих из линии осаждения, время, необходимое для разрешения проблемной ситуации, существенно уменьшается.
В одном частном варианте осуществления:
- указанное, по меньшей мере одно, изображение содержит полутоновое изображение, снятое в отражении, и признак дефекта содержит характеристику, относящуюся к коэффициенту отражения дефекта, который определен из изображения, полученного в отражении; и/или
- указанное, по меньшей мере одно, изображение содержит полутоновое изображение, сделанное в пропускании, и признак дефекта содержит характеристику, относящуюся к коэффициенту пропускания дефекта, который определен из изображения, полученного в пропускании.
Эти коэффициенты отражения и/или пропускания могут быть определены, например, с использованием способа последовательного смывания, применяемого к дефекту, показанному в полутоновом изображении, и при котором на каждом шаге определяется значение коэффициента отражения и/или пропускания. Разумеется, альтернативно можно предусмотреть и другие способы.
Действительно, авторы изобретения обоснованно обнаружили, что, исходя из полутонового изображения дефекта, снятого в отражении, или полутонового изображения дефекта, снятого в пропускании, более конкретно исходя из уровня контрастности дефекта в отражении или в пропускании, который определен из этого изображения, можно идентифицировать, какая камера или камеры могли быть источником этого дефекта. Более конкретно, авторы изобретения установили корреляцию между уровнем контрастности дефекта в отражении или в пропускании и толщиной, при которой осаждение тонкослойной системы прекращается после падения частицы пыли или мусора, другими словами, толщиной, на которой появился дефект. Эту толщину можно легко связать с камерой линии осаждения, участвующей в осаждении тонкослойной системы. Следует отметить, что когда изображение не является гиперспектральным, изобретение базируется на предположении, что рассматриваемое значение контрастности, определенное из изображений, выдаваемых системой оптического контроля, выражает "истинную" интегральную величину контрастности (в отражении или в пропускании) т.е., величину, которая была бы рассчитана из спектра (отражения или пропускания). Под словом "выражает" подразумевается, что рассматриваемое значение контрастности характеризует это истинное значение, в абсолютном или относительном смысле (т.е., оно может быть пропорционально этому истинному значению или быть его монотонной функцией).
В качестве иллюстрации, в случае прозрачной тонкослойной системы, способной отражать в инфракрасном диапазоне, какая описана выше, содержащей тонкий слой серебра, обрамленный двумя покрытиями, содержащими, каждый, один или более тонких слоев, чтобы образовать интерференционную систему, можно наблюдать изменение среднего коэффициента отражения света (факультативно нормированного) на изображении, снятом в отражении, в зависимости от толщины тонкослойной системы, причем это изменение имеет форму перевернутой буквы V (т.е., ∧-образное), и имеет максимум на уровне тонкого слоя серебра. Этот максимум на уровне слоя серебра объясняется низким коэффициентом излучения слоя серебра, что выражается в максимальном отражении света. Другими словами, изменение коэффициента отражения света в зависимости от толщины является возрастающей функцией до слоя серебра, а затем убывающей функцией после этого слоя. Таким образом, легко распознать, исходя их этого представления и знания коэффициентов отражения света, называемых эталонными, характерными для каждой камеры линии осаждения, камеру, которая может быть источником дефекта, среди камер первого ряда камер, участвующие в осаждении первого покрытия, наносимого до слоя серебра, или распознать среди камер второго ряда камер, участвующих в осаждении второго покрытия, осажденного после слоя серебра, камеру, которая может быть источником дефекта.
Таким образом, в проиллюстрированном выше примере, если признак дефекта содержит единственную характеристику, определенную из среднего коэффициента светоотражения дефекта, в конце способа согласно изобретению идентифицируются две камеры, которые могли быть источником дефекта, обнаруженного в тонкослойной системе.
Чтобы определить, принадлежит ли камера, которая была источником наблюдаемого дефекта, к первому или второму ряду камер, авторы изобретения предлагают предпочтительно использовать вторую характеристику дефекта, а именно, в вышеуказанном примере наличие или отсутствие светлого кольца (т.е., кольца, соответствующего максимальному отражению), окружающего дефект в изображении, снятом в отражении.
Так, в одном частном варианте осуществления изобретения способ локализации дополнительно включает стадию обнаружения наличия светлого кольца по периметру дефекта, представленного на указанном, по меньшей мере одном, изображении, причем признак дефекта содержит характеристику, отражающую это наличие.
Действительно, авторы изобретения связали наличие такого светлого кольца с возникновением дефекта до осаждения слоя серебра, т.е., в камере первого ряда камер, участвующих в осаждении первого покрытия, наносимого до слоя серебра; напротив, отсутствие такого светлого кольца в контрасте означает, что дефект был введен после осаждения слоя серебра, т.е., в камере второго ряда камер, участвующих в осаждении второго покрытия, наносимого после слоя серебра. Отметим, что присутствие такого светлого кольца можно легко обнаружить благодаря применению вышеупомянутого способа смывания путем наблюдения за значениями коэффициента отражения света, полученными на разных итерациях способа смывания, в частности, на первых итерациях.
Это применимо также, когда оптическая система выдает изображение дефекта, снятое в пропускании, а характеристика признака дефекта определена из коэффициента светопропускания дефекта.
В одном частном варианте осуществления изобретения способ дополнительно включает:
- этап определения градиента изменения коэффициента (отражения или пропускания) и
- этап обнаружения формы дефекта, исходя из определенного градиента изменения.
Этот вариант осуществления позволяет получить дополнительную информацию о дефекте, в частности, о том, является ли дефект плоским или трехмерным. Такая информация может быть полезной для идентификации в пределах данной камеры, какие элементы камеры являются источником пыли и/или мусора, которые были осаждены на подложку.
Как указывалось выше, изобретение применимо к полутоновым изображениям (например, изображениям, снятым в отражении и/или в пропускании, полученным с использованием источника излучения, испускающего в диапазоне длин волн видимого излучения и/или в инфракрасном диапазоне длин волн и т.д.). Однако это предположение не является ограничивающим, и изобретение может также применяться с другими типами изображений. В таком случае рассматриваемые признаки адаптируются к информации, которую можно извлечь из этих изображений.
Так, в одном частном варианте осуществления указанное, по меньшей мере одно, изображение содержит RGB-кодированное (red-green-blue) изображение, снятое в отражении или в пропускании, и, кроме того, способ включает этап преобразования RGB-изображения в цветовое пространство L*a*b*, причем признак дефекта содержит компоненты a* и b* базовой поверхности дефекта, определенные из преобразованного изображения. Признак дефекта может также дополнительно содержать компонент L* дефекта, который определен из преобразованного изображения.
В другом варианте осуществления указанное, по меньшей мере одно, изображение содержит гиперспектральное изображение, и признак дефекта содержит спектр, отражающий значения коэффициента отражения или коэффициента пропускания базовой поверхности дефекта в зависимости от длины волны. Кроме того, каждый эталонный признак, ассоциированный с камерой линии осаждения, может в этом варианте осуществления содержать совокупность спектров, соответствующих разным толщинам слоя, осажденного в этой камере.
Эти разные типы RGB-кодированных или гиперспектральных изображений вносят больше информации о дефекте, чем полутоновые изображения. Однако они требуют использования более сложных и часто более дорогих систем оптического контроля. Изобретение легко адаптируется к разным системам оптического контроля, размещенных на выходе линии осаждения.
В указанных выше вариантах осуществления из изображений дефекта можно извлечь и использовать небольшое число репрезентативных характеристик дефекта. Это малое число характеристик ограничивает сложность стадии идентификации, так как на этой стадии требуется сравнивать лишь несколько характеристик с эталонными признаками камер.
В другом варианте осуществления изобретения стадия идентификации включает применение способа машинного обучения к признаку дефекта, причем указанный способ обучения базируется на модели, обученной с использованием эталонных признаков, ассоциированных с камерами линии осаждения.
Обучение модели предпочтительно проводится на большом числе изображений, показывающих дефекты, происхождение которых можно идентифицировать или происхождение которых известно, причем эти изображения были получены в продолжение многих рабочих дней. Такая модель состоит, например, из одного или нескольких деревьев решений, обученных с использованием эталонных признаков камер, определенных из большого числа изображений. Так, способ машинного обучения, применяющийся на стадии идентификации, может представлять собой, например, алгоритм случайного леса, известный также под английским названием "random decision forest", способный использовать такие деревья решений. Однако, как вариант можно использовать любой другой алгоритм, позволяющий систематизировать элементы между собой и базирующийся на модели, обученной с использованием эталонных значений (например, алгоритм ближайших соседей, алгоритм метода опорных векторов, или по-английски support vector machine (SVM), алгоритм нейронных сетей и т.д.).
В этом варианте осуществления заслуживающие внимания характеристики дефекта, помимо указанных выше, можно легко извлечь из цифровых изображений и использовать для идентификации камеры, в которой возник дефект. Предпочтительно, признак дефекта, определенный из указанного, по меньшей мере одного, изображения, содержит по меньшей мере одну характеристику интенсивности свечения дефекта и/или характеристику, относящуюся к форме дефекта.
Например, указанная, по меньшей мере одна, характеристика интенсивности свечения дефекта может содержать:
- характеристики, отражающие радиальный профиль интенсивности свечения дефекта, и/или
- характеристики, отражающие крутизну радиального профиля интенсивности свечения дефекта, и/или
- характеристику, отражающую среднюю интенсивность свечения дефекта, и/или
- характеристику, отражающую интенсивность свечения в центре дефекта.
Аналогично, указанная, по меньшей мере одна, характеристика, относящаяся к форме дефекта, может содержать:
- характеристику, отражающую площадь дефекта, и/или
- характеристику, отражающую отношение периметра дефекта к его площади, и/или
- характеристику, отражающую коэффициент формы дефекта.
Вышеуказанные характеристики были установлены авторами изобретения как позволяющие, когда используются все или часть из них, очень надежно идентифицировать камеру, которая была источником дефекта. Следует отметить, что использование способа машинного обучения позволяет легко учесть большее число характеристик дефекта.
Следует отметить, что во всех описанных выше вариантах осуществления изобретения соответствия между эталонными признаками и камерами могут меняться во время осаждения тонких слоев на подложку и зависеть, в частности, от конфигурации линии осаждения. Действительно, может быть причина для изменения вклада каждого катода в толщину тонкослойной системы, в частности, из-за изменения мощности, прикладываемой к катоду, скорости прохождения подложки мимо катода, давления газа, используемого в катодной камере, и его состава и т.д. Эту зависимость в отношении параметров осаждения можно легко учесть эмпирически или аналитически, в частности, используя математическую модель, связывающую параметры осаждения с толщиной тонкослойной системы, соответствующей каждой камере.
В одном частном варианте осуществления различные стадии способа локализации задаются инструкциями компьютерной программы.
Таким образом, изобретение относится также к компьютерной программе на носителе записи или носителе информации, причем эта программа может быть реализована в устройстве локализации или, в более общем смысле, в компьютере, и программа включает в себя инструкции, подходящие для осуществления стадий вышеописанного способа локализации.
Указанная программа может использовать любой язык программирования и иметь форму исходного кода, объектного кода или кода, промежуточного между исходным и объектным кодами, например, находиться в частично компилированной форме или в любой другой желаемой форме.
Изобретение относится также к машиночитаемому носителю записи или информации, содержащему инструкции вышеупомянутой компьютерной программы.
Носитель записи или информации может представлять собой любой объект или устройство, способные хранить программу. Например, носитель может включать запоминающую среду, такую как постоянное запоминающее устройство (ПЗУ), например, CD-ROM, или ПЗУ на интегральных микросхемах, или же магнитные записывающие средства, как, например, дискета или жесткий диск.
С другой стороны, носитель записи или информации может представлять собой передаваемый носитель, такой как оптический или электронный сигнал, который может передаваться по оптическому или электрическому кабелю, по радио или другими средствами. В частности, программа согласно изобретению может быть загружена из сети типа Интернета.
Альтернативно, носитель записи или информации может представлять собой интегральную микросхему, в которую включена программа, причем схема подходит для выполнения или для использования при выполнении рассматриваемого способа.
Изобретение относится также к системе, содержащей:
- линию осаждения, содержащую последовательность камер, способных осаждать тонкослойную систему на подложку, причем каждый тонкий слой материала осаждается в одной или более последовательных камерах линии осаждения, и частицы мусора, остающиеся на поверхности тонкого слоя, осажденного в камере, действуют как маски при последующем осаждении тонких слоев и являются источником дефектов;
- по меньшей мере одну систему оптического контроля, размещенную на выходе линии осаждения и способную выдавать по меньшей мере одно изображение, показывающее дефект тонкослойной системы, осажденной на подложку; и
- устройство локализации согласно изобретению, способное идентифицировать среди последовательности камер линии осаждения по меньшей мере одну камеру, которая может быть источником дефекта.
В других вариантах осуществления можно также предусмотреть, что способ локализации, устройство локализации и система согласно изобретению имеют в комбинации все или часть вышеназванных характеристик.
Краткое описание чертежей
Другие характеристики и преимущества настоящего изобретения выявятся из нижеследующего описания со ссылками на прилагаемые чертежи, которые иллюстрируют пример осуществления, не имеющий ограничительного характера. На фигурах:
- фигура 1 схематически показывает систему согласно изобретению в одном частном варианте осуществления;
- фигура 2 показывает линию осаждения тонкослойной системы, являющуюся частью системы с фигуры 1;
- фигура 3 показывает систему оптического контроля, размещенную на выходе линии осаждения в системе с фигуры 1;
- фигура 4 схематически показывает архитектуру аппаратных средств устройства локализации согласно изобретению, являющегося частью системы с фигуры 1, в одном частном варианте осуществления;
- фигуры 5, 11, 14 и 16 показывают в форме блок-схем четыре варианта осуществления способа локализации согласно изобретению;
- фигура 6 показывает способ последовательного смывания, который может быть применен к изображению дефекта тонкослойной системы для определения признака этого дефекта, в одном частном варианте осуществления;
- фигуры 7, 9A-9C, 10, 12, 13 и 15 показывают различные примеры эталонных признаков, которые можно использовать для идентификации камеры, являющейся источником дефекта тонкослойной системы согласно изобретению; и
- фигура 8 показывает камеру, содержащую катод, а также различные элементы, защищающие этот катод.
Подробное описание изобретения
Фигура 1 показывает в своем окружении систему 1 согласно изобретению в одном частном варианте осуществления.
Система 1 включает в себя:
- линию осаждения 2, позволяющую осадить тонкослойную систему на прозрачную подложку 3;
- систему оптического контроля 4, размещенную на выходе линии осаждения 2 и способную получать различные цифровые изображения прозрачной подложки, покрытой тонкослойной системой (покрытая подложка обозначена позицией 5), и обнаруживать, исходя из этих изображений, наличие дефектов подложки 5 с покрытием; а также
- устройство локализации 6 согласно изобретению, которое способно анализировать цифровые изображения IM дефектов, обнаруженных системой оптического контроля 4, с целью локализации их источника в линии осаждения 2.
В приводимых ниже примерах тонкослойная система осаждена на стеклянную подложку 3 и образует интерференционную систему. В этих примерах тонкослойная система содержит один или более функциональных слоев, способных отражать в инфракрасном диапазоне (а именно, один или два слоя серебра в примерах 1 и 2 и слой смешанного оксида индия-олова (ITO) в примере 3), и покрытия, образованные из одного или более тонких слоев, находящиеся с обеих сторон каждого функционального слоя, чтобы образовать интерференционную систему. Ниже термином "модуль" (M1, M2, M3) обозначено каждое из покрытий, которые обрамляют один или более слоев серебра или функциональных слоев ITO, причем понимается, что модуль может состоять из одного тонкого слоя или множества тонких слоев.
Конечно, описываемые ниже примеры сами по себе не являются ограничивающими, и можно предусмотреть другие тонкослойные системы а также другие подложки, в частности, прозрачные (например, жесткие или гибкие подложки из органического полимерного материала).
В нижеследующих примерах, покрытия, или "модули", которые обрамляют один или более функциональных слоев, состоят из тонких слоев на подложке диэлектрических материалов (например, тонкие слои из оксида, нитрида или оксинитрида). Как вариант, в частности, в случае, когда в качестве функциональных слоев используются тонкие металлические слои, каждый модуль, который расположен выше, в направление осаждения тонкослойной системы, тонкого металлического слоя, может содержать в качестве слоя, соседнего с тонким металлическим слоем, тонкий металлический верхний блокирующий слой, окисленный или нет, предназначенный для защиты тонкого металлического слоя во время осаждения последующего слоя, например, если этот последний осаждается в азотирующей или окислительной атмосфере, а также во время возможной последующей термообработки. Каждый тонкий металлический слой может быть также осажден на и в контакте с тонким металлическим нижним блокирующим слоем. Таким образом, тонкослойная система может содержать верхний блокирующий слой и/или нижний блокирующий слой, обрамляющие единственный имеющийся или каждый тонкий металлический слой. Эти блокирующие слои, которые являются очень тонкими слоями, обычно толщиной менее 1 нм, чтобы не влиять на светопропускание системы, играют роль расходных слоев, в частности, способных улавливать кислород.
В варианте осуществления, показанном на фигуре 1, осаждение тонких слоев проводится в линии осаждения 2 на стеклянную подложку 3 посредством метода катодного распыления с поддержкой магнитного поля, называемого также магнетронным напылением.
Как известно, метод катодного напыления основан на конденсации в разреженной атмосфере пара материала мишени, выпускаемого из распылительного источника на подложку. Более точно, атомы источника (называемого также мишенью) выбрасываются в ионизированный газ, такой, например, как аргон, в вакуумной камере, поддерживаемой при определенном давлении. Создается электрическое поле, приводящее к ионизации газа и, таким образом, к образованию плазмы. Напряжение на мишени снижают до отрицательного (катод), чтобы ионы, присутствующие в плазме, притягивались мишенью и выбрасывали из нее атомы. Распыленные таким образом частицы рассеиваются по камере, и некоторые из них собираются, в частности, на подложке, на которой они образуют тонкий слой. Кроме того, в случае магнетронного катода магнитами, находящимися вблизи катода, создается магнитное поле, ориентированное перпендикулярно электрическому полю, чтобы задерживать электроны вблизи катода. Это позволяет повысить степень ионизации газа, и тем самым, существенно улучшить кпд осаждения по сравнению с обычным методом катодного распыления. Поскольку методы катодного распыления хорошо известны специалистам, они не будут здесь описываться подробнее.
Фигура 2 схематически показывает линию осаждения 2, использующуюся для осаждения тонких слоев на стеклянную подложку 3 путем катодного распыления. В показанном примере она содержит входную зону 7, первую буферную зону 8, зону магнетронного напыления 10, содержащую первую секцию передачи 9 и вторую секцию передачи 11, вторую буферную зону 12 и выходную зону 13.
Зона катодного напыления 10 содержит, помимо двух секций передачи 9 и 11, последовательность элементов Ei, i=1,…,N, где N означает целое число. Каждый элемент Ei содержит отделение, или камеру, осаждения 15-i, содержащую катод, используемый как мишень при магнетронном напылении, и одну или две насосных камеры, или отделения, оборудованные насосом и при необходимости находящиеся с обеих сторон от камеры осаждения, чтобы создавать в ней вакуум. Стеклянная подложка 3 проводится последовательно через разные камеры зоны катодного напыления 10 с помощью конвейера или ленточного транспортера 16.
Последовательность различных элементов Ei, i=1,…,N позволяет осадить тонкослойную систему на стеклянную подложку 3. Следует отметить, что в осаждении одного тонкого слоя одного и того же материала может участвовать в установленных пропорциях несколько последовательных камер 15-i. Параметризация различных камер 15-i, в которых имеет место осаждение тонких слоев, состоит в подборе различных параметров магнетронного напыления, в частности, давления газа и его состава, мощности, приложенной к катоду, угла падения бомбардирующих частиц, толщины осаждения и т.д.
Система оптического контроля 4 размещена на выходе линии осаждения 2. Как схематически показано на фигуре 3, она оборудована одной или несколько видеокамерами 17 и несколькими источниками излучения 18, позволяющими создавать различные типы цифровых изображений на подложке 5 с покрытием, выходящей из линии осаждения 2. В примере, изображенном на фигуре 3, система оптического контроля 4 содержит три источника излучения 18, а именно, источник света 18-1 типа RDF (от reflection dark field, или темное поле в отраженном свете), источник света 18-2 типа RBF (от reflection bright field, или светлое поле в отраженном свете) и источник света 18-3 типа TBF (от transmission bright field, или светлое поле в пропускании). Эти источники света поочередно включаются, а затем выключаются, чтобы получить различные конфигурации цифровых изображений, снятых в отражении (соответствующих отражению источника света от подложки с покрытием) и/или в пропускании (соответствующих свету, исходящему из источника света и проходящему сквозь подложку с покрытием), показывающие потенциальные дефекты подложки 5 с покрытием, содержащей тонкослойную систему.
Тип видеокамер 17, полученных цифровых изображений и конфигурация источников излучения ничем не ограничиваются. Так, в зависимости от их типа и функциональных возможностей, видеокамеры 17 могут выдавать, например, полутоновые цифровые изображения, трихроматические (red-green-blue) RGB-изображения, или это могут быть даже гиперспектральные видеокамеры, способные выдавать гиперспектральные изображения, и т.д. Вместе с тем, системой оптического контроля 4 могут использоваться источники излучения, работающие в видимом диапазоне или в других диапазонах длин волн, как, например, инфракрасный диапазон. Эти источники излучения могут быть ориентированы под разными углами в зависимости от изображений, которые желательно получить и использовать, чтобы локализовать одну или более камер, которые были источником дефекта.
В качестве иллюстрации в нижней части фигуры 6 показано полутоновое цифровое изображение, снятое в отражении, полученное с использованием RBF-источника света, работающего в видимом диапазоне. Пятно, появляющееся на этом изображении, отражает дефект, обнаруженный системой оптического контроля 4. На этом изображении контраст, измеренный видеокамерой системы оптического контроля 4, пропорционален коэффициенту отражения дефекта. Следует отметить, что когда изображение не является гиперспектральным, как в данном случае, изобретение основывается на гипотезе, что рассматриваемое значение контрастности, определенное из изображений, выдаваемых системой оптического контроля, выражает (в абсолютном или относительном смысле) истинное значение интегральной величины (RL или TL), которая будет извлечена из характеристики спектральной чувствительности.
Такая система оптического контроля сама по себе известна и традиционно применяется для обнаружения дефектов покрытий, осаждаемых в линии осаждения, такой как линия осаждения 2. Поэтому она не будет описываться здесь подробнее. Следует отметить, что изобретение не ограничено использованием единственной системы оптического контроля, и можно предусмотреть, чтобы изображения, обрабатываемые устройством локализации согласно изобретению, происходили из нескольких систем оптического контроля, размещенных на выходе линии осаждения.
Как указывалось выше, дефекты подложки с покрытием могут быть вызваны, в частности, частицами пыли или мусора, присутствующими в некоторых камерах 15-i зоны 10 катодного напыления, и падающими беспорядочно на подложку, когда она проходит через эти камеры. Очень предпочтительно, используя изображения дефектов, обнаруженных на подложке 5 с покрытием, выходящей из линии осаждения 2, предлагаемое изобретением устройство локализации 6 способно с большим успехом определить камеру 15-i линии осаждения 2 как источник этого дефекта.
В описываемом здесь варианте осуществления устройство локализации 6 является компьютером, архитектура аппаратных средств которого схематически показана на фигуре 4. Он включает в себя процессор 19, оперативную память 20, постоянное запоминающее устройство 21, энергонезависимую память 22, модуль связи 23 и различные модули ввода/вывода 24.
Модуль связи 23 позволяет устройству локализации 6 получать изображения дефектов, сделанные системой оптического контроля 4. Он может содержать, в частности, шину передачи цифровых данных и/или средства коммуникации по сети (локальной или удаленной), такой, например, как сетевой адаптер и т.д., в зависимости от того, как система оптического контроля 4 и устройство локализации 6 соединены друг с другом.
Модули ввода/вывода 24 устройства локализации 6 содержат, в частности, клавиатуру, мышку, экран и/или любое другое средство (например, графический интерфейс), позволяющие конфигурировать устройство локализации 6 и получать доступ к результатам анализа, проводимого на изображениях дефектов, предоставляемых для этого устройству.
Постоянное запоминающее устройство 21 устройства локализации 6 представляет собой считываемый процессором 19 носитель записи согласно изобретению, на котором записана компьютерная программа PROG согласно изобретению, содержащая инструкции для выполнения стадий способа локализации согласно изобретению.
Компьютерная программа PROG задает эквивалентно программные и функциональные модули, которые в данном примере сконфигурированы так, чтобы осуществлять стадии способа локализации согласно изобретению. Эти функциональные модули базируются на или управляют вышеуказанными аппаратурными элементами 19-24. В частности, в данном случае они содержат:
- модуль 6A для получения по меньшей мере одного изображения, демонстрирующего дефект, полученного системой оптического контроля 4, причем указанный модуль 6A способен сообщаться с модулем связи 23 и управлять им;
- модуль 6B для определения, исходя из указанного, по меньшей мере одного, изображения, признака дефекта, содержащего по меньшей мере одну репрезентативную характеристику дефекта; и
- модуль 6C для идентификации по меньшей мере одной камеры, которая может быть источником дефекта, выполненный так, чтобы использовать признак дефекта и совокупность эталонных признаков, ассоциированных с камерами линии осаждения.
Функции этих модулей более подробно описываются ниже в связи с фигурами 5-16 в четырех разных вариантах осуществления изобретения. Три первых варианта осуществления отличаются типом цифровых изображений, выдаваемых системой оптического контроля 4 и анализируемых устройством локализации 6, чтобы определить местонахождение источника дефекта. Так, в первом варианте осуществления изображения, используемые устройством локализации 6, представляют собой полутоновые цифровые изображения; во втором варианте осуществления речь идет о трихроматических цифровых изображениях (или RGB от английского red-green-blue), а в третьем варианте осуществления изображения, выдаваемые системой оптического контроля, являются гиперспектральными изображениями. В четвертом варианте осуществления устройство локализации 6 использует альтернативный тип обработки по сравнению с тремя первыми вариантами осуществления для локализации дефекта в линии осаждения 2. Однако в этих четырех вариантах осуществления изобретения применяются одни и те же основные стадии локализации дефекта, а именно:
- стадия получения одного или более изображений, показывающих указанный дефект, созданных системой оптического контроля 4;
- стадия определения, исходя из указанных изображений, признака дефекта, содержащего по меньшей мере одну репрезентативную характеристику дефекта; и
- стадия идентификации среди камер 15-i, i=1,…,N, линии осаждения по меньшей мере одной камеры, которая может быть источником дефекта, исходя из признака дефекта и используя эталонные признаки, ассоциированные с камерами 15-i, i=1,…,N.
Далее эти стадии будут описаны более подробно для каждого варианта осуществления. Для иллюстрации этих разных вариантов осуществления будут поочередно рассматриваться три примера тонкослойных систем.
Пример 1: Тонкослойная система осаждена на подложку из натриево-кальциевого-силикатного стекла и содержит, в направлении осаждения системы на подложку:
- первое покрытие, или модуль, M1, состоящий из совокупности тонких слоев на основе диэлектрических материалов (например, оксидные, нитридные или оксинитридные слои),
- тонкий слой серебра и
- второе покрытие, или модуль, M2, состоящий из совокупности тонких слоев на основе диэлектрических материалов (например, оксидные, нитридные или оксинитридные слои);
причем каждый слой системы может быть осажден несколькими разными катодами, чтобы получить необходимую толщину, и геометрические толщины тонких слоев системы подбирают так, чтобы вся тонкослойная система образовывала интерференционную систему.
Пример 2: Тонкослойная система осаждена на подложку из натриево-кальциевого-силикатного стекла и содержит два тонких слоя серебра, с расположенными с обеих сторон тонкими слоями Si3N4, со следующими толщинами:
Геометрические толщины тонких слоев системы подбирают так, чтобы вся тонкослойная система образовывала интерференционную систему. В примере 2 разные тонкие слои одного и того же материала (Si3N4 или Ag) осаждают на подложку с разными толщинами. Обозначение слоя, к которому оно относится, приведено в скобках, например, Ag (L1) означает первый осажденный слой серебра, а Ag (L2) второй слой серебра. В примере 2 "модуль M1" относится к тонкому слою Si3N4, осажденному на подложку до первого слоя серебра Ag (L1), "модуль M2" к тонкому слою Si3N4, осажденному между первым слоем серебра Ag (L1) и вторым слоем серебра Ag (L2), и "модуль M3" относится к тонкому слою Si3N4, осажденному после второго слоя серебра Ag (L2).
Пример 3: Тонкослойная система осаждена на подложку из натриево-кальциево-силикатного стекла и содержит тонкий слой смешанного оксида индия-олова (ITO), с обеих сторон окруженный покрытиями или модулями M1, M2 на подложке диэлектрических материалов, со следующими толщинами:
Геометрические толщины тонких слоев системы подбирают так, чтобы вся тонкослойная система образовывала интерференционную систему. В примере 3 разные тонкие слои одного и того же материала осаждают на подложку с разными толщинами. Обозначение слоя, к которому оно относится, приведено в скобках. В примере 3 "модуль M1" относится к покрытию, образованному из тонких слоев SiN и SiO2 (L1), которые осаждают на подложку до слоя ITO, а "модуль M2" относится к покрытию, образованному из тонких слоев SiO2 (L2) и TiO2, которые осаждают на подложку после слоя ITO.
Конечно, эти примеры приводятся просто в качестве иллюстрации и никоим образом не ограничивают изобретение. Как упоминалось выше, изобретение применимо к различным тонкослойным системам, которые можно осадить на подложку, в частности, к тонкослойным системам, образующим интерференционную систему.
В описываемых ниже вариантах осуществления предполагается, что дефект был обнаружен благодаря изображениям, полученным системой оптического контроля 4. Способ, которым обнаруживается этот дефект, сам по себе известен и не будет описываться здесь.
Фигура 5 показывает основные стадии способа локализации согласно изобретению, какой реализуются устройством локализации 6 в первом варианте осуществления.
В этом первом варианте осуществления изобретения система оптического контроля 4 оборудована цифровыми видеокамерами, подходящими для выдачи полутоновых цифровых изображений IM обнаруженного дефекта, полученных путем активации всех или части разных источников излучения системы оптического контроля 4. Такие изображения состоят из множества пикселей, причем каждому пикселю сопоставлен уровень серого, выражающий его светлоту.
При этом здесь представляют интерес цифровые изображения дефекта, снятые в отражении, обозначенные IMR, полученные путем активации источника света 18-2 типа RBF и характеризующие коэффициент отражения дефекта, а также цифровые изображения дефекта, снятые в пропускании, обозначенные IMT, полученные путем активации источника света 18-3 типа TBF и отражающие коэффициент пропускания дефекта. Для простоты в последующем описании рассмотрение будет ограничено одним изображением IMR, снятым в отражении, и при необходимости, одним изображением IMT, снятым в пропускании.
Отметим, что, как будет подробнее поясняться ниже, в зависимости от конфигурации рассматриваемой тонкослойной системы не требуется, чтобы устройство локализации 6 систематически было способно предоставлять два типа изображений.
В частности, в случае тонкослойной системы, похожей на пример 1, содержащей единственный слой серебра (или единственный слой другого низкоизлучательного материала), для точной локализации источника дефекта может быть достаточным одного IMR-изображения, снятого в отражении.
В примере 2, содержащем несколько слоев серебра, использование единственного изображения IMR, снятого в отражении, может позволить выделить небольшое число камер, которые могут быть источником дефекта, но этого не всегда достаточно, чтобы можно было идентифицировать единственную камеру среди малого числа камер. Чтобы устранить эту остаточную неопределенность, можно использовать другое изображение, чем изображение, снятое в отражении, как, например, изображение, снятое в пропускании, полученное с использованием источника излучения, работающего в инфракрасном диапазоне длин волн, или можно использовать несколько изображений дефекта, как, например, одно изображение IMR, снятое в отражении, и одно изображение IMT, снятое в пропускании, причем оба получены с использованием источников излучения, работающих в диапазоне длин волн видимого света.
Учитывать ли изображение, снятое в отражении, и/или изображение, снятое в пропускании, полученное с использованием источника излучения в диапазоне длин волн видимого света и/или с другими длинами волн, например, длинами волн в инфракрасном диапазоне, зависит, в частности, от способности рассматриваемой тонкослойной системы поглощать и отражать излучение и от репрезентативных характеристик дефекта, которые используются для осуществления изобретения. Это дополнительно иллюстрируется ниже в связи с приведенными примерами.
Предполагается, что устройство локализации 6 получает от системы оптического контроля 4 по меньшей мере одно полутоновое изображение IM дефекта, обнаруженного в тонкослойной системе, осажденной на стеклянную подложку 3 (шаг E10). Это или эти изображения IM принимаются устройством локализации 6 через его модуль связи 23 и его модуль получения 6A.
Затем устройство локализации 6 через его модуль определения 6B определяет, исходя из одного или более изображений IM, признак SIG(DEF) дефекта (шаг E20). Под признаком дефекта в контексте изобретения понимается одна или более репрезентативных характеристик дефекта, которые позволяют локализовать его происхождение в линии осаждения 2 путем сравнения его с эталонными признаками, ассоциированными с каждой камерой 15 линии осаждения. Эти характеристики могут зависеть, в частности, от типа изображений IM, использующихся устройством локализации 6, и от информации о дефекте, содержащейся в этих изображениях, об отражательной и поглощающей способности тонкослойной системы, осажденной на подложку, от формы дефекта и т.д.
Чтобы лучше проиллюстрировать эту стадию, рассмотрим сначала тонкослойную систему по описанному выше примеру 1, содержащую один тонкий слой серебра, по обе стороны которого располагаются два модуля M1 и M2, образованные из множества тонких слоев на подложке диэлектрических материалов (например, оксидные, нитридные или оксинитридные слои). Кроме того, предполагается, что система оптического контроля 4 выдает единственное полутоновое изображение, полученное в отражении, IM=IMR, причем это изображение получено с использованием источника света 18-2, работающего в диапазоне длин волн видимого излучения.
В описываемом здесь варианте осуществления модуль определения 6B извлекает из этого снятого в отражении IMR-изображения различные характеристики, относящиеся к коэффициенту отражения света дефектом. Для этого к снятому в отражении IMR-изображению применяется способ последовательного смывания, позволяющий извлечь в ходе нескольких итераций, разные значения коэффициента отражения дефекта.
Фигура 6 схематически иллюстрирует применение этого способа к дефекту DEF, показанному на IMR-изображении, снятом в отражении. Этот способ состоит в том, чтобы исходя из снятого в отражении IMR-изображения дефекта, последовательно "смывать" или "удалять" дефект по его контуру (т.е., на каждой итерации удаляется небольшая толщина контура дефекта, и эта толщина не обязательно является одинаковой от итерации к итерации) и рассчитать среднее значение уровня серого у пикселей в удаленной зоне дефекта, при этом уровень серого для пикселя характеризует коэффициент отражения дефекта в месте, представленном пикселем. Область, оставшаяся после каждого смывания, показана в качестве иллюстрации на фигуре 6 в прямоугольниках, ассоциированных с каждой итерацией (iter=1, iter=2,…, iter=7). Число итераций и шаг смывания, применяемый на каждой итерации (например, 1 пиксель), использующиеся в реализации этого способа последовательного смывания, выбираются в соответствии с формой дефекта, чтобы позволить извлечь релевантную информацию об этом дефекте.
В примере, показанном на фигуре 6, дефект изображен как пятно, окруженное светлым кольцом. На первой итерации (iter=1) смытая поверхность, использующаяся для расчета среднего значения уровня серого пикселей, намеренно включает только "черную" часть фона изображения, которая находится вне дефекта и окружает последний. В результате получается относительно низкое среднее значение уровня серого (так как интегрируются только очень низкие значения уровня серого, представляющие черную зону, окружающую дефект).
При второй итерации (iter=2) смытая часть дефекта соответствует светлому кольцу, окружающему дефект. Так как это светлое кольцо соответствует высоким значениям уровня серого, отсюда получается максимальный коэффициент отражения света.
Затем смывание продолжается, и средние коэффициенты отражения снижаются вплоть до стабилизации, в показанном примере начинающейся с четвертой итерации (iter=4). "Стабилизированное" значение среднего в последних итерациях дает значение коэффициента светоотражения дефекта, обозначенное RL(DEF). Наличие максимума, в данном случае на второй итерации, обозначенного RLmax(DEF), и форма пика средних значений уровня серого иллюстрирует наличие светлого кольца вокруг дефекта. Таким образом, описанный способ смывания позволяет легко установить присутствие светлого кольца по периметру дефекта. Следует отметить, что в отсутствие светлого кольца величины RLmax(DEF) и RL(DEF) являются по существу одинаковыми.
В описываемом здесь первом варианте осуществления величина коэффициента отражения RL(DEF) является характеристикой дефекта, используемой модулем определения 6B для определения признака дефекта. Коэффициент светоотражения RL(DEF), учитываемый в признаке, предпочтительно является нормированным, например, нормированным на коэффициент отражения подложки 5 с покрытием, выходящей из линии осаждения 2 (конечный продукт), или на коэффициент отражения голого стекла (средний контраст). Такая нормировка позволяет с успехом избавиться от колебаний настроек разных видеокамер системы оптического контроля. Однако она не является обязательной. Таким образом, в остальной части описания не имеет значения, рассматривается ли нормированный и/или ненормированный коэффициент отражения и/или пропускания, так как изобретение применимо одинаково к обоим этим случаям.
Модуль определения 6B также добавляет к признаку дефекта индикатор присутствия или отсутствия светлого кольца вокруг обнаруженного дефекта, как указано выше, исходя из значения RLmax(DEF).
Как вариант, в модуле определения 6B может использоваться не способ последовательного смывания, а другие способы для определения признака дефекта и обнаружения присутствия или отсутствия светлого кольца вокруг указанного дефекта. Например, модуль определения 6B может определять профиль интенсивности свечения дефекта путем оценки коэффициента отражения света в разных точках на диагонали дефекта (например, самой большой диагонали или, наоборот, самой малой диагонали). Анализ различных полученных значений профиля интенсивности свечения дефекта позволяет модулю определения 6B обнаружить возможное присутствие светлого кольца вокруг дефекта и оценить среднее значение коэффициента отражения света дефектом.
В еще одном варианте профили интенсивности могут быть определены модулем определения 6B на совокупности радиусов дефекта, а затем усреднены, чтобы извлечь из них признак дефекта.
Затем полученный таким способом признак дефекта сравнивается модулем идентификации 6C устройства локализации 6 с несколькими эталонными признаками (шаг E30), чтобы идентифицировать одну или более камер, которые могут быть источником дефекта.
В описанном здесь варианте осуществления модуль идентификации 6C использует эталонный признак SIGref(i) для каждой отдельной камеры 15-i, i=1,…,N линии осаждения 2. Этот эталонный признак содержит те же характеристики (т.е., те же типы характеристик), что и признак дефекта. Эталонный признак может содержать единственное значение (т.е., единственную точку) для каждой характеристики или, напротив, содержать интервал значений для каждой характеристики, или только пределы, или несколько значимых величин такого интервала значений.
Как вариант, с заданной камерой может быть ассоциировано несколько эталонных признаков.
В описываемом здесь первом варианте осуществления эталонные признаки генерируются заранее (шаг E00) и хранятся, например, в энергонезависимой памяти 22 устройства локализации 6. Как вариант, они могут храниться в удаленной области памяти и могут быть получены по запросу, например, через модуль связи 23 устройства локализации 6.
Эталонные признаки создаются, например, экспериментально, путем постукивания по каждой камере 15-i, i=1,…,N, линии осаждения 2. Эта процедура состоит в постукивании по стенкам и элементам каждой камеры и сборе частиц мусора, возникших в результате этого постукивания. Обследование с использованием системы оптического контроля 4 дефектов, полученных в камере, и анализ изображений, полученных в результате этого обследования, позволяет оценить средний эталонный признак, ассоциированный с камерой и содержащий такие же характеристики, какие определены из дефекта (в рассматриваемом здесь примере коэффициент отражения света, присутствие или отсутствие светлого кольца). Другими словами, в конце шага E00 устройство локализации 6 имеет в памяти эталонные признаки для каждой из камер 15-i линии осаждения, и эти эталонные признаки дают для каждой камеры 15-i средний (а где уместно, нормированный) коэффициент отражения, называемый эталонным коэффициентом, усредненный по совокупности дефектов, образованных в результате постукивания по камере 15-i, а также индикатор, отражающий, в среднем, присутствие или отсутствие светлого кольца по периметру дефектов, возникших в этой камере.
Как вариант, индикатор наличия или отсутствия светлого кольца, включенный в эталонный признак каждой камеры 15-i, может быть определен как функция положения камеры 15-i относительно камер, участвующих в осаждении слоя серебра. Действительно, авторы изобретения обоснованно установили связь между этим положением и присутствием или отсутствием светлого кольца вокруг дефекта: из-за высокого коэффициента излучения слоя серебра присутствие светлого кольца вокруг дефекта на снятом в отражении изображении дефекта тонкослойной системы, содержащей единственный слой серебра, отражает возможное появление этого дефекта до осаждения слоя серебра (т.е., в камере, участвующей в осаждении модуля M1). Напротив, отсутствие такого кольца означает, что дефект, вероятно, появился после осаждения слоя серебра (т.е., в камере, участвующей в осаждении модуля M2). Таким образом, при определении эталонных признаков можно напрямую закрепить за камерами, участвующими в осаждении слоев, образующих модуль M1, индикатор, отражающий присутствие светлого кольца, а за камерами, участвующими в осаждении слоев, образующих модуль M2, индикатор, отражающий отсутствие светлого кольца.
Следует отметить, что созданные так эталонные признаки зависят от конфигурации линии осаждения 2 и, в частности, от процесса катодного напыления, осуществляемого катодами различных камер 15-i. Так, эти признаки зависят, в частности, от мощности, приложенной к каждому катоду, от толщины слоя, осаждаемого каждым катодом, от газовой смеси в камере, и т.д. Эталонные признаки можно определить экспериментально для каждого условия (каждой параметризации) осаждения, осуществляя эксперименты с постукиванием в этих разных условиях.
Как вариант, можно предусмотреть использование расчетной модели, позволяющей переходить от одной параметризации к другой.
Такую расчетную модель используют, например, когда эталонные признаки соответствуют интервалам значений. Способ, каким она может применяться к единственному значению, специалистам очевиден и здесь не будет описываться.
Обозначим вклад катода k, осаждающего материал x на подложку в модуле y, как e(k,x,y). При этом предполагается, что этот вклад пропорционален электрической мощности, подаваемой на этот катод, обозначенной P(k,x,y). Кроме того, обозначим полную толщину слоя материала x в модуле как E(x,y).
Для расчета диапазона признаков, соответствующих катоду k, можно рассчитать предельные кумулятивные толщины, связывающие вклад катода k (т.е., соответствующие пределам эталонного признака катода k), а именно:
- для нижнего предела:

- для верхнего предела
где  означает сумму толщин слоев, осажденных до слоя материала x.
означает сумму толщин слоев, осажденных до слоя материала x.
Если обозначить F функцию, которая позволяет, исходя из кумулятивной толщины, определить эталонный признак камеры (например, F является вектор-функцией, задающей пределы участков кривой, определяющей эталонные признаки, или функцией, рассчитывающей средние значения по этим участкам кривой), то эталонные признаки, соответствующие новой параметризации, получают, применяя функцию F к указанным выше нижнему e(k-1,x,y) и верхнему e(k,x,y) пределам.
В одном варианте осуществления эталонные признаки генерируются путем моделирования или расчета.
На фигуре 7 показан пример эталонных коэффициентов отражения Rref, измеренных со стороны тонкослойной системы и полученных путем постукивания, и соответствующих осаждению тонкослойной системы по примеру 1, в котором участвует несколько катодов, обозначенных по оси x (катоды K1, K3, K4 и т.д.), причем эти катоды содержатся таком же числе камер (т.е., имеется однозначное соответствие между катодом, указанном на абсциссе, и камерой линии осаждения).
В этом примере эталонные коэффициенты отражения Rref были сформированы из изображений, снятых четырьмя разными видеокамерами системы оптического контроля 4, размещенными так, чтобы отслеживать разные зоны подложки с покрытием. Для генерирования эталонных коэффициентов отражения Rref можно либо оценить по одному эталонному коэффициенту на видеокамеру или зону подложки с покрытием, или оценить гибридный эталонный коэффициент, исходя из эталонных коэффициентов, полученных каждой видеокамерой, например, путем усреднения эталонных коэффициентов, полученных каждой видеокамерой.
В примере, показанном на фигуре 7, для каждого катода было определено единственное значение эталонного коэффициента отражения Rref. Как вариант, можно определить для каждого катода не одно значение эталонного коэффициента отражения, но интервал, содержащий несколько возможных значений эталонного коэффициента отражения, или, в еще одном варианте, пределы интервала возможных значений эталонного коэффициента отражения.
Отметим, что на фигуре 7 катоды K9, K9B и K10A соответствуют катодам, участвующим в осаждении слоя серебра. Известно, что эти катоды не создают (или создают мало) мусора. Другими словами, маловероятно, что дефект тонкослойной системы будет возникать в камере, содержащий один из этих катодов. Вместе с тем, следует отметить, что в примере, показанном на фигуре 7, некоторые катоды (или, эквивалентно, некоторые камеры) ассоциированы с одним и тем же значением коэффициента отражения (например, катоды K4 и K23).
Эталонные коэффициенты отражения Rref могут, как вариант, быть представлены не как функция камер, с которыми они ассоциированы, но как толщина осажденного слоя в тонкослойной системе. В этом случае устанавливается соответствие между толщиной осаждения и камерой, участвующей в осаждении, соответствующем этой толщине, и хранится в устройстве локализации 6, например, в его энергонезависимой памяти 22. Таким образом, данную камеру можно ассоциировать с одной или несколькими толщинами осажденного слоя или, другими словами, с одним или несколькими эталонными признаками.
В описываемом здесь первом варианте осуществления сравнение признака дефекта с эталонными признаками, ассоциированными с различными камерами линии осаждения 2, реализуется модулем идентификации 6C в два этапа.
Более точно, сначала модуль идентификации 6C определяет, исходя из признака SIG(DEF) дефекта, имеет ли последний светлое кольцо по своему периметру.
По причинам, указанным выше, предполагается, что эталонные признаки, ассоциированные с камерами линии осаждения 2, которые находятся до камер, содержащих катоды для осаждения слоя серебра (т.е., до камер осаждения тонких слоев, образующих модуль M1, содержащих катоды K1, K3, K4, K5, K5B, K6, K7 и K8 в примере, показанном на фигуре 7), включают, среди других своих характеристик, индикатор, отражающий наличие светлого кольца по периметру дефекта, возникающего в этих камерах.
Если модуль идентификации 6C обнаруживает, исходя из признака SIG(DEF) дефекта, присутствие светлого кольца по периметру дефекта, то модуль идентификации 6C связывает дефект с одной из камер, участвующих в образовании модуля M1 (и, соответственно, с одним из катодов K1, K3, K4, K5, K5B, K6, K7 и K8 в примере, показанном на фигуре 7).
Если, напротив, признак SIG(DEF) дефекта указывает на отсутствие светлого кольца по периметру дефекта, модуль идентификации 6C связывает дефект с одной из камер линии осаждения, которые находятся после камер, содержащих катоды, участвующие в осаждении слоя серебра, т.е., с одной из камер, участвующих в осаждении модуля M2 и содержащих один катод из катодов K11, K12, K13, K19, K21, K27B, K28 и K30.
Далее, на втором этапе модуль идентификации 6C сравнивает коэффициент отражения дефекта DEF, т.е., коэффициент, содержащийся в его признаке SIG(DEF), с эталонными коэффициентами отражения Rref, содержащимися в эталонных признаках камер, выбранных на предыдущем этапе (или с интервалами значений, или даже с пределами интервалов, задающих эталонные коэффициенты отражения). Затем модуль 6C выбирает камеру, эталонный коэффициент отражения Rref которой соответствует коэффициенту отражения (или интервалу, или пределам), содержащемуся в признаке дефекта, т.е., камеру, эталонный признак которой соответствует признаку дефекта. Под словом "соответствует" здесь понимается камера, эталонный признак которой наиболее близок к признаку дефекта, например, в смысле предписанного расстояния.
Для этого в примере, показанном на фигуре 7, когда в каждом эталонном признаке содержится единственное значение эталонного коэффициента отражения, модуль идентификации 6C выбирает камеру из камер 15-i, i=1,…,N, линии осаждения 2, которая минимизирует заданное расстояние, такое как евклидово расстояние (называемое также "расстоянием типа L2") или расстояние в абсолютном значении (называемое также "расстоянием типа L1"). Это расстояние рассчитывается между коэффициентом отражения, содержащимся в признаке SIG(DEF) дефекта, и эталонным коэффициентом отражения Rref, содержащимся в эталонном признаке SIGref, ассоциированным с рассматриваемой камерой.
Отметим, что когда эталонный признак содержит не единственное значение, а интервал значений или пределы такого интервала, модуль идентификации 6C может эквивалентно оценить расстояние от признака дефекта до этого интервала или до этих пределов и выбрать камеру, которая минимизирует это расстояние.
Выбранная таким способом камера идентифицируется модулем идентификации 6C как камера, из которой происходит дефект DEF подложки 5 с покрытием (шаг E40).
После этой идентификации можно предпринять операцию по техобслуживанию идентифицированной камеры. Эта операция может состоять, в частности, из очистки указанной камеры, например, путем постукивания по ее стенкам, чтобы отделить от стенок осевшие на них частицы мусора.
Следует отметить, что анализ цифровых изображений дефекта, выдаваемых системой оптического контроля 4 устройству локализации 6, позволяет установить другую полезную информацию о дефекте.
Например, на шаге E20 определения признака дефекта модуль определения 6B может определить градиент изменения коэффициента отражения дефекта. Этот градиент можно легко определить из кривой смывания, полученной при осуществлении способа последовательного смывания, или из значений коэффициента отражения, при необходимости полученных на диагоналях или радиусах дефекта.
Зная этот градиент и его изменения, модуль определения 6B может вывести информацию о форме дефекта. Он может, в частности, установить, что дефект является плоским (или относительно плоским), если градиент имеет максимум на малом числе пикселей (типично на одном пикселе), или что он имеет трехмерные утолщения, если градиент остается почти неизменным на большем числе пикселей.
Зная эту информацию о форме дефекта, можно облегчить идентификацию, в пределах одной камеры, элемента, который был источником мусора, создавшего дефект, и позволить оптимизировать операцию техобслуживания, выполняемую на этой камере. Действительно, в каждой камере имеются различные защитные экраны, размещенные вокруг катода, как показано на фигуре 8, обозначенные позицией 25. В зависимости от того, происходит ли мусор из шероховатых или плоских зон этих экранов, форма его частиц будет разной, и они будут создавать на подложке дефекты разной формы. В качестве иллюстрации, частицы мусора, происходящие из экрана, не содержащего решетки, находящегося на потолке камеры, будут создавать дефекты плоской формы. Напротив, частица мусора, происходящая из находящегося внизу камеры горизонтального экрана, содержащего металлическую решетку, имеющую выступы, будет создавать трехмерный дефект.
Следует отметить, что хотя представленный выше первый вариант осуществления был описан в отношении полутонового изображения, снятого в отражении и полученного с использованием источника излучения, излучающего в диапазоне длин волн видимого света, этот вариант может быть реализован также с использованием полутонового изображения, снятого в отражении и полученного при использовании источника излучения, действующего в другом диапазоне длин волн (например, в инфракрасном), или с использованием полутонового изображения, снятого в пропускании и полученного при использовании источника излучения, излучающего в диапазоне длин волн, подходящем для отражательных и поглощающих свойств рассматриваемой тонкослойной системы.
В примере, показанном на фигуре 7, для тонкослойной системы по примеру 1 достаточно, чтобы устройство локализации 6 анализировало изображение IMR дефекта, снятое в отражении, чтобы идентифицировать, в какой камере возник этот дефект, причем неопределенность в отношении локализации камеры между рядом камер, участвующих в образовании модуля M1, или рядом камер, участвующих в образовании модуля M2, можно легко устранить, как описано выше, путем обнаружения присутствия или отсутствия светлого кольца по периметру дефекта.
Хотя этот первый вариант осуществления был описан в связи с тонкослойной системой по примеру 1, он применим и к другим тонкослойным системам, образующим интерференционную систему, и, в частности, к системе по примеру 3, а также к другим тонкослойным системам, содержащим единственный функциональный слой.
Он может применяться также, когда тонкослойная система содержит несколько функциональных слоев, например, два тонких слоя серебра, как в указанном выше примере 2.
Однако может оказаться, что для такой тонкослойной системы необходимо учитывать несколько изображений дефекта (например, одно изображение, снятое в отражении, и одно изображение, снятое в пропускании), если желательно более точно идентифицировать камеру, из которой происходит дефект тонкослойной системы.
На фигуре 9A показан пример эталонных коэффициентов отражения Rref для камер, участвующих в осаждении тонкослойной системы в соответствии с примером 2. Эталонные коэффициенты отражения Rref измерены со стороны тонкослойной системы и нормированы на коэффициент отражения стеклянной подложки 5 с покрытием, полученной на выходе линии осаждения 2. Они показаны как функция толщины слоя (в нанометрах, нм), осажденного на стеклянную подложку 3. Как упоминалось выше, соответствие между толщиной осаждения и камерой, участвующей в осаждении тонкого слоя, ассоциированной с этой толщиной, может быть установлено заранее и сохранено в энергонезависимой памяти 22 устройства локализации 6, чтобы позволить ему идентифицировать камеру, в которой возник дефект.
Эталонные коэффициенты отражения Rref камер, участвующих в осаждении слоев серебра, которые создают мало частиц мусора, обозначены на фигуре 9A позициями Ag1 (первый слой серебра, соответствующий толщине осажденного на подложку слоя от 41 до 48 нм) и Ag2 (второй слой серебра, соответствующий толщине осажденного на подложку слоя от 123 до 143 нм), соответственно.
Как можно видеть из этой фигуры, значение коэффициента отражения, равное 0,1, может соответствовать разным (а именно трем) толщинам осажденного слоя и, следовательно, разным камерам линии осаждения 2. Из этого следует, что если реализация изобретения на тонкослойной системе по примеру 2 ограничивается рассмотрением признака дефекта, состоящего из единственной характеристики, соответствующей коэффициенту отражения дефекта, стадия идентификации E40 может привести, в зависимости от значения этого коэффициента отражения, к идентификации нескольких камер. В примере, показанном на фигуре 9A, идентификация устанавливает три камеры. Следует отметить, что хотя это число не равно единице, оно соответствует относительно малому числу камер по сравнению с полным числом камер, находящихся в линии осаждения, что позволяет упростить техническое обслуживание, выполняемое на линии осаждения 2.
Учет наличия светлого кольца вокруг дефекта, как описано выше, в признаке дефекта может позволить отличить дефект, происходящий из камеры, которая участвует в осаждении тонких слоев модуля M1, от дефекта, происходящего из камеры, которая участвует в осаждении тонких слоев модуля M2. Однако этот учет может оказаться недостаточным, чтобы различить две камеры, которые участвовали в осаждении тонких слоев, относящихся к одному и тому же модулю (в настоящем случае модулю M2 в примере, показанном на фигуре 9A).
Чтобы устранить этот недостаток, в примере 2 можно использовать, в дополнение к IMR-изображению, снятому в отражении, IMT-изображение, снятое в пропускании и полученное с источником излучения, излучающим в инфракрасном диапазоне длин волн (например, на длине волны 850 нм). Этот источник излучения может быть размещен в системе оптического контроля 4, например, вместо источника света 18-3, или может принадлежать другой системе оптического контроля, размещенной на выходе линии осаждения 2. Это может быть, без разницы, как широкополосный источник, охватывающий по меньшей мере часть инфракрасного диапазона длин волн, при этом система оптического контроля предпочтительно оборудована видеокамерой со спектральным разрешением, позволяющей делать изображения в инфракрасном диапазоне, так и источник излучения со спектральным разрешением, в таком случае система оптического контроля может быть оборудована широкополосной видеокамерой или видеокамерой со спектральным разрешением в инфракрасном диапазоне.
Затем модуль определения 6B может извлечь, исходя из этого IMT-изображения, снятого в пропускании в инфракрасном диапазоне, коэффициент пропускания T(DEF) дефекта, способом, похожим или идентичным описанному выше в связи с извлечением коэффициента отражения дефекта из IMR-изображения, снятого в отражении. Этот коэффициент пропускания, факультативно нормированный, используется как характеристика признака дефекта, в дополнение к нормированному коэффициенту отражения, определенному из изображения IMR. Следовательно, признак SIG(DEF) дефекта состоит, с одной стороны, из коэффициента отражения дефекта, определенного из изображения IMR, а с другой стороны, из коэффициента пропускания дефекта, определенного из изображения IMT. Здесь не предусматривается, чтобы признак дефекта содержал индикатор присутствия или отсутствия светлого кольца.
Фигура 9B показывает эталонные коэффициенты пропускания Tref камер с фигуры 9A, участвующих в осаждении тонкослойной системы, соответствующей примеру 2. Эти эталонные коэффициенты пропускания Tref можно получить, как описано выше для эталонных коэффициентов отражения Rref, путем постукивания по каждой из камер линии осаждения 2. В примере, показанном на фигуре 9B, эталонные коэффициенты пропускания Tref нормированы на коэффициент пропускания стеклянной подложки 5 с покрытием, полученной на выходе линии осаждения 2. Они показаны как функция толщины слоя, осажденного на стеклянную подложку 3, причем толщина выражена в нанометрах (нм). Эталонные коэффициенты пропускания Tref для камер, участвующих в осаждении слоев серебра, обозначены на фигуре 9B позициями Ag1 (первый слой серебра, соответствующий толщине слоя, осажденного на подложку, от 41 нм до 48 нм) и Ag2 (второй слой серебра, соответствующий толщине слоя, осажденного на подложку, от 123 до 143 нм), соответственно.
Как можно видеть из этой фигуры, эталонный коэффициент пропускания Tref, равный 0,71, приводит к двум возможным толщинам осажденного слоя. Другими словами, если бы признак дефекта содержал только коэффициент пропускания, то, в зависимости от значения этого коэффициента, можно было идентифицировать две камеры как потенциальный источник дефекта.
Чтобы можно было получить более точную оценку места камеры, в которой возник дефект, модуль идентификации 6C учитывает в признаке дефекта как коэффициент отражения дефекта, так и коэффициент пропускания дефекта, определенные модулем определения 6B. Аналогично, каждый эталонный признак состоит в таком случае из одного значения эталонного коэффициента отражения Rref и одного значения эталонного коэффициента пропускания Tref.
На фигуре 9C показан для разных толщин осажденного слоя (тех же, какие рассматривались на фигурах 9A и 9B) эталонный коэффициент отражения Rref (по абсциссе) как функция эталонного коэффициента пропускания Tref, относящегося к тому же эталонному признаку. Из фигуры 9C можно видеть, что все эталонные признаки, соответствующие разным предполагаемым толщинам осажденного слоя, являются разными.
Другими словами, сравнение признака дефекта SIG(DEF), состоящего из коэффициента отражения дефекта и коэффициента пропускания дефекта, с эталонными признаками, ассоциированными с камерами, позволяет модулю идентификации 6C идентифицировать единственную камеру, в которой возник дефект. Эта камера ассоциируется с эталонным признаком, ближайшим к признаку дефекта, т.е., минимизирующим заданное расстояние, такое, например, как евклидово расстояние, между двумя векторами, соответствующими сравниваемым признакам, причем каждый вектор содержит в качестве компонентов коэффициент отражения и коэффициент пропускания.
Однако в случае таких тонкослойных систем, как система по примеру 2, учет нескольких характеристик в признаке дефекта и в эталонных признаках не является обязательным. Действительно, авторы изобретения обнаружили, что используя изображение, снятое в пропускании на длине волны, которая обоснованно выбрана в инфракрасном диапазоне, в отношении отражательных и поглощательных свойств тонкослойной системы, можно, исходя из признака, содержащего единственную характеристику, определенную из коэффициента пропускания дефекта, извлеченного из этого изображения, точно идентифицировать камеру, в которой возник дефект.
Фигура 10 иллюстрирует один пример нормированных эталонных коэффициентов пропускания Tref камер, участвующих в осаждении тонкослойной системы в соответствии с примером 2, определенных из снятых в пропускании изображений дефектов, образованных в результате постукивания по камерам. В примере с фигуры 10 рассматриваемые изображения, снятые в пропускании, были получены с источником излучения, работающим на длине волны 1050 нм, т.е. относящейся к инфракрасному диапазону.
Из этой фигуры можно видеть, что все эти эталонные коэффициенты пропускания Tref как функции толщины осажденного слоя являются разными. Другими словами, сравнивая признак дефекта, состоящий из единственного коэффициента пропускания, определенного из изображения, снятого в пропускании на той же длине волны 1050 нм, позволяет однозначно идентифицировать камеру, в которой возник дефект.
В только что описанном первом варианте осуществления система оптического контроля 4 выдает устройству локализации 6 полутоновые цифровые изображения, и устройство локализации 6 использует разную информацию, содержащуюся на этих изображениях, для определения происхождения дефекта в тонкослойной системе, полученной в линии осаждения 2. Однако изобретение применимо и к другим типам изображений, какие будут описаны теперь во втором и третьем вариантах осуществления.
На фигуре 11 показаны основные этапы способа локализации согласно изобретению, какой осуществляется устройством локализации 6 во втором варианте осуществления.
В этом втором варианте осуществления изобретения система оптического контроля 4 оборудована цветными видеокамерами и выдает трихроматические цифровые изображения, кодированные в основных цветах красный-зеленый-синий (по-английски red-green-blue, RGB). Под RGB-изображениями здесь предпочтительно понимаются изображения, кодированные в соответствии со стандартом sRGB. Как известно, при RGB-кодировании каждая точка или пиксель изображения кодируется тремя величинами, указывающими соответственно интенсивность каждого из основных цветов: красного, зеленого и синего, в этой точке.
Во втором варианте осуществления используются RGB-кодированные изображения дефекта, полученные системой контроля 4 путем активации источника света 18-2 типа RBF; эти изображения выражают коэффициент отражения дефекта, обнаруженного на подложке 5 с покрытием, если смотреть со стороны тонкослойной системы. Для простоты в дальнейшем описании рассмотрение ограничено одним изображением IMR дефекта, снятым в отражении. Однако аналогичный подход можно применять и к изображению, снятому в пропускании.
Устройство локализации 6 получает от системы оптического контроля 4, RGB-кодированное снятое в отражении изображение IMR дефекта, обнаруженного в тонкослойной системе, осажденной на стеклянную подложку 3 (шаг F10). Это изображение IMR принимается устройством локализации 6 через его модуль связи 23 и его модуль получения 6A.
В описываемом здесь втором варианте осуществления перед извлечением эталонного признака дефекта DEF из полученного изображения IMR устройство локализации 6 преобразует это изображение в цветовое пространство, отличное от пространства RGB (шаг F20). Более точно, оно преобразует изображение IMR в известное специалистам цветовое пространство a*b*L*. В этом цветовом пространстве L* означает светлоту, а компоненты a* и b* характеризуют, насколько цвет рассматриваемой точки отличается от цвета серой поверхности такой же светлоты. Следует отметить, что в этом цветовом пространстве L* более или менее соответствует уровню отражения света дефектом.
При этом изображение преобразуется устройством локализации 6 в два этапа: сначала оно преобразует RGB-кодированное изображение IMR в цветовое пространство X,Y,Z, например, как подробно описано на вебсайте http://www.brucelindbloom.com/index.html?Equations.html. Затем оно преобразует изображение, полученное в цветовом пространстве (X,Y,Z), в цветовое пространство (L*,a*,b*), как подробно указано на вышеупомянутом вебсайте или на сайте https://fr.wikipedia.org/wiki/CIE L*a*b*Conversions CIE XYZ vers CIE L.2Aa.2Ab.2A.
После этого преобразования устройство локализации 6 через его модуль определения 6B определяет, исходя из преобразованного изображения (обозначено IMR'), признак SIG(DEF) дефекта (шаг F30). Для этого оно извлекает из преобразованного изображения IMR' координаты компонентов a* и b* базовой поверхности дефекта. С этой целью можно использовать вышеописанный способ последовательного смывания. Эти координаты будут обозначаться как aDEF* и bDEF*.
Затем полученный таким способом признак дефекта, содержащий компоненты aDEF* и bDEF*, сравнивается модулем идентификации 6C устройства локализации 6 с совокупностью эталонных признаков (шаг F40), причем каждый эталонный признак SIGref(i) базируется на тех же характеристиках, что и признак дефекта, и ассоциирован с одной камерой 15-i, i=1,…,N, линии осаждения 2 или с самой толщиной осажденного слоя, соответствующей камере.
Эталонные признаки могут быть сгенерированы заранее и записаны, например, в энергонезависимой памяти 22 устройства локализации 6. Как вариант, они могут храниться в удаленной области памяти и могут быть получены по запросу, например, через модуль связи 23 устройства локализации 6.
Как и в первом варианте осуществления, эталонные признаки могут быть сформированы, исходя из эксперимента по постукиванию, проведенному заранее на камерах линии осаждения 2 (шаг F00). Обследование с использованием системы оптического контроля 4 кусочков мусора, образованных в каждой камере, и, в частности, с использованием RGB-кодированных изображений этих частиц мусора, снятых в отражении, позволяет получить средние эталонные координаты aref*(i) и bref*(i) для каждой камеры 15-i, i=1,…,N, или для различных толщин осажденного слоя, соответствующих разным камерам. Отметим, что, как упоминалось выше для первого варианта осуществления, соответствия между эталонными признаками и различными камерами зависит от конфигурации линии осаждения 2 и, в частности, от параметров катодного напыления в различных камерах 15-i.
Фигура 12 показывает пример эталонных координат (aref*, bref*), полученных для разных толщин тонких слоев, осажденных в разных камерах 15-i, i=1,…,N линии осаждения 2 и приводящих к тонкослойной системе, соответствующей описанному выше примеру 3. На этой фигуре по оси абсцисс отложен компонент aref*, а по оси ординат компонент bref*. Каждая толщина, соответствующая осаждению, осуществленному катодом одной из камер, показана символом, причем форма символа зависит от материала, осажденного этим катодом (например, ромб для толщин, соответствующих осаждению слоя TiO2, квадрат для толщин, соответствующих осаждению слоя SiO2 (L2), и т.д.). Для лучшей различимости значения толщины осажденного слоя, соответствующие каждой точке, показанной на фигуре, были опущены.
Кроме того, для простоты здесь предполагается, что каждый эталонный признак, ассоциированный с толщиной, состоит из одного значения компонентов aref* и bref*. Однако, как упоминалось выше, как вариант можно предусмотреть, чтобы каждая толщина ассоциировалась с интервалом значений aref* и с интервалом значений bref*, или с пределами, задающими такие интервалы.
Сравнение признака дефекта SIG(DEF) с эталонными признаками SIGref(i), i=1,…,N, очень просто реализуется на шаге F40 путем поиска толщины тонкослойной системы, эталонный признак которой является ближайшим к признаку дефекта. Затем эта толщина связывается, как было указано выше, с камерой или катодом, соответствующими осаждению такой толщины. Другими словами, модуль идентификации 6C ищет на эталонной кривой, показанной на фигуре 12, точку (aref*, bref*), ближайшую к точке (aDEF*, bDEF*) (показанной крестиком на фигуре 12), и определяет отсюда толщину осажденного слоя, а затем соответствующую камеру.
Как вариант, когда эталонные признаки содержат интервал значений aref* и bref* или пределы таких интервалов, модуль идентификации 6C ищет ближайший эталонный признак, в смысле предписанного расстояния до точки (aDEF*, bDEF*), и определяет отсюда толщину осажденного слоя, а затем соответствующую камеру. Можно рассматривать любой тип расстояния: это может быть, в частности, расстояние, измеренное по нормали к кривой, задаваемой рассматриваемыми эталонными интервалами aref* и bref* и проходящей через точку (aDEF*, bDEF*).
Определенная таким способом камера идентифицируется модулем идентификации 6C устройства локализации 6 как камера, которая может быть источником дефекта DEF подложки 5 с покрытием (шаг F50).
После этой идентификации можно осуществить операцию по обслуживанию идентифицированной таким способом камеры.
Отметим, что этот второй вариант осуществления может применяться также и для других конфигураций тонкослойной системы, например, к конфигурации, близкой к примеру 2, но которая содержит два слоя серебра.
Если в такой конфигурации остается неопределенность в точной локализации камеры, модуль 6B определения признака дефекта может добавить к признаку дефекта компонент LDEF* базовой поверхности дефекта и включить эквивалентный компонент Lref* в эталонные признаки камеры. В таком случае получают трехмерную кривую, иллюстрирующую эталонные признаки камер 15-i, i=1,…,N (или толщины осажденного слоя, соответствующие этим камерам), как показано на фигуре 13 для другого примера тонкослойной системы с двумя слоями серебра.
На шаге сравнения F40 модуль идентификации 6C ищет на этой кривой эталонный признак (точка (Lref*,aref*,bref*)), ближайший к признаку дефекта (LDEF*,aDEF*,bDEF*) (показан крестиком на фигуре 13). Затем модуль идентификации 6C идентифицирует камеру, соответствующую этому эталонному признаку, как камеру, в которой возник дефект DEF.
На фигуре 14 показаны основные шаги способа локализации согласно изобретению, какой осуществляет устройство локализации 6 в третьем варианте осуществления.
В этом третьем варианте осуществления изобретения система оптического контроля 4 оборудована гиперспектральными видеокамерами и выдает гиперспектральные цифровые изображения дефекта, обнаруженного на подложке 5 с покрытием. Эти гиперспектральные изображения примечательны тем, что они связывают с каждым пикселем изображения спектр в заданном диапазоне длин волн (спектр отражения или пропускания, в зависимости от конфигурации рассматриваемого источника излучения). Каждый спектр задается как вектор из K компонентов Sp(λk), k=1,…,K, где K есть целое число больше 1, и каждый компонент Sp(λk) является значением коэффициента отражения или пропускания дефекта на длине волны λk.
Таким образом, устройство локализации 6 получает от системы оптического контроля 4 снятое в отражении гиперспектральное изображение IMR дефекта, обнаруженного на тонкослойной системе, осажденной на стеклянную подложку 3 (шаг G10). Это изображение IMR принимается устройством локализации 6 через его модуль связи 23 и его модуль получения 6A.
Затем устройство локализации 6 через его модуль определения 6B определяет, исходя из гиперспектрального изображения IMR, признак SIG(DEF) дефекта (шаг G20). Для этого оно определяет из изображения IMR спектр отражения от базовой поверхности дефекта, используя, например, способ последовательного смывания, какой был описан выше в связи с первым вариантом осуществления изобретения, и применяя его к спектру отражения каждого пикселя (значение коэффициента отражения определяется для каждой длины волны спектра отражения, ассоциированного с каждым пикселем, а не для единственного значения коэффициента отражения на пиксель, как в первом варианте осуществления).
Таким образом, признак SIG(DEF), определенней модулем определения 6B, состоит из K спектральных компонентов SpDEF(λk), k=1,…,K, извлеченных таким способом.
Далее, полученный таким способом признак SIG(DEF) дефекта сравнивается модулем идентификации 6C устройства локализации 6 с совокупностью эталонных признаков (шаг G30), причем каждый эталонный признак SIGref(i) основан на тех же характеристиках, что и признак дефекта, и ассоциирован с одной камерой 15-i, i=1,…,N линии осаждения 2.
Как и в двух первых вариантах осуществления, эталонные признаки могут быть генерированы заранее и храниться, например, в энергонезависимой памяти 22 устройства локализации 6. Как вариант, они могут храниться в удаленной области памяти и могут быть получены по запросу, например, через модуль связи 23 устройства локализации 6.
Как было описано в первом и втором вариантах осуществления, эталонные признаки можно создать, исходя из эксперимента с постукиванием, проведенного заранее на камерах линии осаждения 2 (шаг G00). Анализ с помощью системы оптического контроля 4 частиц мусора, создаваемых в каждой камере, и, в частности, снятых в отражении гиперспектральных изображений этих частиц мусора позволяет получить эталонные спектры Spref для каждой камеры 15-i, i=1,…,N, или для разных толщин осажденного слоя, соответствующих камерам 15-i, i=1,…,N.
Кроме того, следует отметить, что, как упоминалось выше для первого и второго вариантов осуществления, соответствия между эталонными признаками и различными камерами зависят от конфигурации линии осаждения 2 и, в частности, от способа катодного распыления в этих разных камерах 15-i.
Фигура 15 иллюстрирует пример эталонных спектров, полученных для разных толщин тонких слоев, осажденных в камерах 15-i, i=1,…,N линии осаждения 2, для тонкослойной системы по описанному выше примеру 3. На этой фигуре различные спектры приводятся как функция толщины осаждения на подложку. Другими словами, данной камере 15-i соответствует набор эталонных спектров Spref(j), j=J1(i),…J2(i), где J1(i) и J2(i) обозначают два целых числа, зависящих от индекса i, причем это набор спектров может быть легко идентифицирован, исходя из толщины осажденного слоя, за которую ответственна данная камера 15-i.
Таким образом, каждый эталонный признак SIGref(i), ассоциированный с камерой 15-i, содержит множество спектров (Spref(J1(i))…Spref(J2(i))), причем число спектров J2(i)-J1(i)+1 может меняться от камеры к камере в зависимости от толщины тонкого слоя, осажденного в камере, и от предполагаемого шага дискретизации, причем каждый спектр Spref(j),j=J1(i),…,J2(i) задается K-компонентным вектором.
Сравнение признака дефекта SIG(DEF) с эталонными признаками SIGref(i), i=1,…,N, реализуется на шаге G30 модулем идентификации 6C путем расчета расстояния (например, типа L2, измеренного по нормали) между признаком дефекта SIG(DEF) и каждым эталонным признаком SIGref(i). В описываемом здесь третьем варианте осуществления это расстояние определяется из выражения:

где j=1,…,J1(1),J1(2),…J2(N).
Как вариант, каждый эталонный признак, ассоциированный с камерой 15-i, может содержать всего два предельных спектра, ограниченных с обеих сторон частью поверхностью, задающей спектры, ассоциированные с этой камерой. В таком случае модуль идентификации 6C может реализовать два подэтапа, сначала идентифицируя первый предельный спектр среди эталонных признаков, соответствующих спектру, ближайшему к признаку дефекта. Если один и тот же предельный спектр разделяют две соседние камеры, модулю идентификации 6C достаточно идентифицировать, какая из этих двух соседних камер соответствует признаку дефекта.
Как вариант, можно использовать другие расстояния для сравнения признака дефекта с эталонными признаками, например, расстояние, измеренное с использованием указанной выше нормали L2, но которое включает использование другого весового коэффициента для длин волн (снабженных индексом k), относящихся к ультрафиолетовому диапазону.
Модуль идентификации 6C идентифицирует камеру, соответствующую индексу j, которая минимизирует это расстояние (шаг G40), как камеру линии осаждения 2, из которой происходит дефект подложки 5 с покрытием.
После этой идентификации можно осуществить операцию по техобслуживанию идентифицированной таким способом камеры.
Следует отметить, что этот третий вариант осуществления может применяться равным образом и к другим конфигурациям тонкослойной системы, таким, например, как конфигурация, похожая на пример 2, но которая содержит два слоя серебра.
В первых трех вариантах осуществления, описанных выше, устройство локализации 6 определяет признак дефекта, исходя из одной или более характеристик, выражающих способность дефекта к отражению и/или поглощению, а именно, в частности, коэффициент отражения, определенный из изображения, полученного в отражении, и/или коэффициент пропускания, определенный из изображения, полученного в пропускании, и сравнивает этот признак дефекта с эталонными признаками, ассоциированными с каждой камерой линии осаждения 2, которые получены, например, из эксперимента с постукиванием. В зависимости от поглощательных и/или отражательных свойств подложки 5 с покрытием и от типа изображений, выдаваемых системой оптического контроля (изображения, сделанные в отражении, в пропускании, полученные с помощью источников излучения, излучающих в видимом или инфракрасном диапазоне длин волн, и т.д.), может быть достаточным, чтобы признак содержал всего одну характеристику, чтобы позволить идентифицировать единственную камеру, которая может быть источником дефекта, или, наоборот, может потребоваться множество характеристик, чтобы идентифицировать эту единственную камеру. Однако следует напомнить, что в таком контексте учет всего одной удачно выбранной характеристики дефекта уже позволяет резко уменьшить число камер, которые могут быть источником дефекта, от полного числа камер, содержащихся в линии осаждения.
В некоторых отношениях можно провести параллели между этими тремя вариантами осуществления и деревом решений, позволяющим идентифицировать одну или более камер, которые могут быть источником дефекта.
Далее будет описан четвертый вариант осуществления, в котором идентификация камеры, являющейся источником дефекта, осуществляется с использованием метода обучения. В описываемом здесь четвертом варианте осуществления указанный метод обучения с позволяет легко учесть большое число деревьев решений.
На фигуре 16 показаны основные этапы способа локализации, осуществляемые устройством локализации 6 в четвертом варианте осуществления.
Здесь, как и в первом варианте осуществления, предполагается, что система оптического контроля 4 создает для каждого дефекта, обнаруженного на выходе линии осаждения 2, полутоновые цифровые изображения, сделанные в отражении и/или в пропускании. Для простоты в дальнейшем описании будут рассматриваться только полутоновые изображения IMR, сделанные в отражении, выдаваемые системой оптического контроля 4 для каждого обнаруженного дефекта. Отметим, что этот четвертый вариант осуществления применим также в случае, когда система оптического контроля 4 генерирует и выдает RGB-кодированные цифровые изображения или гиперспектральные изображения.
Таким образом, устройство локализации 6 получает от системы оптического контроля 4 полутоновое изображение IMR дефекта, обнаруженного на тонкослойной системе, осажденной на стеклянную подложку 3 (шаг H10). Это изображение IMR принимается устройством локализации 6 через его модуль 23 связи и его модуль 6A получения.
Затем устройство локализации 6 через его модуль определения 6B определяет, исходя из изображения IMR, признак SIG(DEF) дефекта (шаг H20). Предпочтительно, признак SIG(DEF) дефекта содержит одну или более характеристик интенсивности свечения дефекта, и/или одну или более характеристик, относящихся к форме дефекта.
Более точно, в описанном здесь четвертом варианте осуществления признак SIG(DEF) дефекта содержит:
- характеристики, отражающие радиальный профиль интенсивности свечения дефекта в отражении (или в пропускании, если полученное изображение является изображением в пропускании). Такой профиль может включать в себя множество значений интенсивности, измеренных на наибольшей диагонали дефекта (например, 8 значений или, другими словами, 8 характеристик),
- характеристики, отражающие градиент (крутизну) радиального профиля интенсивности свечения дефекта в отражении (или в пропускании, если полученное изображение является изображением в пропускании). Такие характеристики должны сравниваться с обнаружением наличия светлого кольца, описанного в первом варианте осуществления изобретения,
- характеристику, отражающую площадь дефекта,
- характеристику, отражающую отношение периметра дефекта к площади дефекта,
- характеристику, отражающую коэффициент формы дефекта.
- характеристику, отражающую среднюю интенсивность свечения дефекта в отражении (или в пропускании, если полученное изображение является изображением в пропускании); и
- характеристику, отражающую интенсивность свечения в отражении (или в пропускании, если полученное изображение является изображением в пропускании) в центре дефекта.
Извлечение этих характеристик само по себе не представляет трудностей для специалиста в данной области и не описывается здесь подробно.
Конечно, этот список не является исчерпывающим, и другие характеристики могут быть легко извлечены из изображений IMR, показывающих дефект DEF.
Затем полученный таким способом признак дефекта SIG(DEF) сравнивается модулем идентификации 6C устройства локализации 6 с эталонными признаками (шаг H30), при этом каждый эталонный признак SIGref(i) основан на тех же характеристиках, что и признак дефекта, и ассоциирован с отдельной камерой 15-i, i=1,…,N линии осаждения 2.
В описываемом здесь четвертом варианте осуществления эталонные признаки были созданы заранее, исходя из обучающей последовательности, состоящей из совокупности изображений дефектов, обнаруженных на выходе линии осаждения 2, причем эти изображения снимались системой оптического контроля 4 в течение многих рабочих дней. Для каждого из этих изображений признак дефекта определяется на основе тех же характеристик, какие выбраны на шаге H20, и с этим признаком (называемым эталонным) ассоциируется камера, в которой обнаруживается дефект, или соответствующая толщина осажденного слоя. Для каждого обнаруженного дефекта эта камера или эта толщина осажденного слоя определяются экспериментально, например, путем постукивания по камерам линии осаждения 2, или с использованием способа локализации согласно изобретению в его описанном выше первом варианте осуществления.
Затем эти эталонные признаки используются в описываемом здесь четвертом варианте осуществления для создания деревьев решений (шаг H00). Как известно, такие деревья можно использовать в качестве прогнозирующей модели, позволяющей оценить значение характеристики системы из наблюдения других характеристик этой же системы. Другими словами, в рассматриваемом случае речь идет об использовании этих деревьев решений, обученных с использованием эталонных признаков камер линии осаждения 2, для предсказания камеры-источника дефекта, исходя из его признака. Таким образом, деревья решений создаются здесь из эталонных признаков, извлеченных из изображений обучающей последовательности и из информации о камерах, ассоциированных с этими признаками. Следовательно, эти деревья решений сами моделируют эталонные признаки для каждой камеры 15-i.
Используя эти деревья решений и алгоритм обучения на основе таких деревьев, как, например алгоритм, называемый случайным лесом деревьев, по-английски называемый random decision forest, модуль идентификации 6C может автоматически "классифицировать" признак SIG(DEF) дефекта, т.е., связать его с эталонным признаком или даже напрямую с камерой линии осаждения 2, эталонный признак которой соответствует признаку дефекта. Такой алгоритм обучения сам по себе известен и не будет описываться здесь подробно. Он описан, например, в работе T. Hastie et al. "The elements of statistical learning - Data Mining, Inference and Prediction", 2nd edition, Springer.
Как вариант, можно рассмотреть другие алгоритмы, позволяющие классифицировать элементы по отношению друг к другу (при этом элементы являются признаками, ассоциированными с камерами), такие, например, как алгоритмы ближайших соседей, алгоритмы метода опорных векторов (support vector machine, SVM) или алгоритмы на основе нейронных сетей.
Модуль идентификации 6C идентифицирует камеру, определенную алгоритмом обучения и соответствующую признаку дефекта, как камеру, в которой возник дефект (шаг H40).
После этой идентификации можно осуществить операцию по техобслуживанию идентифицированной таким способом камеры.
Описанные выше четыре варианта осуществления позволяют быстро и эффективно идентифицировать камеру в линии осаждения, которая была источником дефекта тонкослойной системы, полученной в линии осаждения. Следует отметить, что эти варианты осуществления были описаны в связи с линией осаждения, в которой осаждение осуществлялось путем магнетронного напыления. Однако изобретение применимо и к другим способам осаждения, которые могут испытывать сходные проблемы (независимо от типа мусора и образованных дефектов), например, к другим способам напыления, таким как ионно-лучевое напыление (ion beam sputtering, IBS) или осаждение с поддержкой ионным лучом (ion beam assisted deposition, IBAD), или же способами осаждения путем испарения, химического осаждения из паровой фазы (chemical vapor deposition, CVD), плазмохимического осаждения из паровой фазы (plasma enhanced chemical vapor deposition, PECVD), осаждения из паровой фазы при низком давлении (low-pressure chemical vapor deposition, LPCVD) и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ СТАЛЬНОЙ ПРОДУКЦИИ, ВКЛЮЧАЮЩИЙ СТАДИЮ ПОЛУЧЕНИЯ ХАРАКТЕРИСТИК СЛОЯ ОКСИДОВ НА ДВИЖУЩЕЙСЯ СТАЛЬНОЙ ПОДЛОЖКЕ | 2016 |
|
RU2702818C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО С НИЗКИМ ПРОПУСКАНИЕМ ВИДИМОГО СВЕТА И НИЗКИМ ОТРАЖЕНИЕМ ВИДИМОГО СВЕТА | 1995 |
|
RU2173470C2 |
| СПОСОБ ИССЛЕДОВАНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ВОСПРИИМЧИВОСТИ ФОТОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ В СОСТАВЕ СОЛНЕЧНЫХ БАТАРЕЙ К ОПТИЧЕСКОМУ ИЗЛУЧЕНИЮ | 2013 |
|
RU2565331C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МНОГОСЛОЙНОЙ ПОДЛОЖКИ И МНОГОСЛОЙНАЯ ПОДЛОЖКА | 2006 |
|
RU2374082C2 |
| СПОСОБ ЗАЩИТЫ ОТ ПОДДЕЛКИ И КОНТРОЛЯ ПОДЛИННОСТИ ЦЕННЫХ ИЗДЕЛИЙ | 2004 |
|
RU2276409C2 |
| ОСТЕКЛЕНИЕ, ОБЕСПЕЧЕННОЕ ТОНКОСЛОЙНЫМ ПАКЕТОМ ДЛЯ ЗАЩИТЫ ОТ СОЛНЦА | 2015 |
|
RU2676302C2 |
| МАТЕРИАЛ, СНАБЖЕННЫЙ СИСТЕМОЙ ТОНКИХ СЛОЕВ С ТЕРМИЧЕСКИМИ СВОЙСТВАМИ | 2016 |
|
RU2707829C2 |
| ИНТЕРФЕРОМЕТРИЧЕСКАЯ ОПТИЧЕСКАЯ ДИСПЛЕЙНАЯ СИСТЕМА С ШИРОКОДИАПАЗОННЫМИ ХАРАКТЕРИСТИКАМИ | 2007 |
|
RU2452987C2 |
| БЕСЦВЕТНЫЙ МОНОКРИСТАЛЛИЧЕСКИЙ АЛМАЗ И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2006 |
|
RU2473720C2 |
| СЛОЙ БЕСЦВЕТНОГО АЛМАЗА | 2006 |
|
RU2415204C2 |
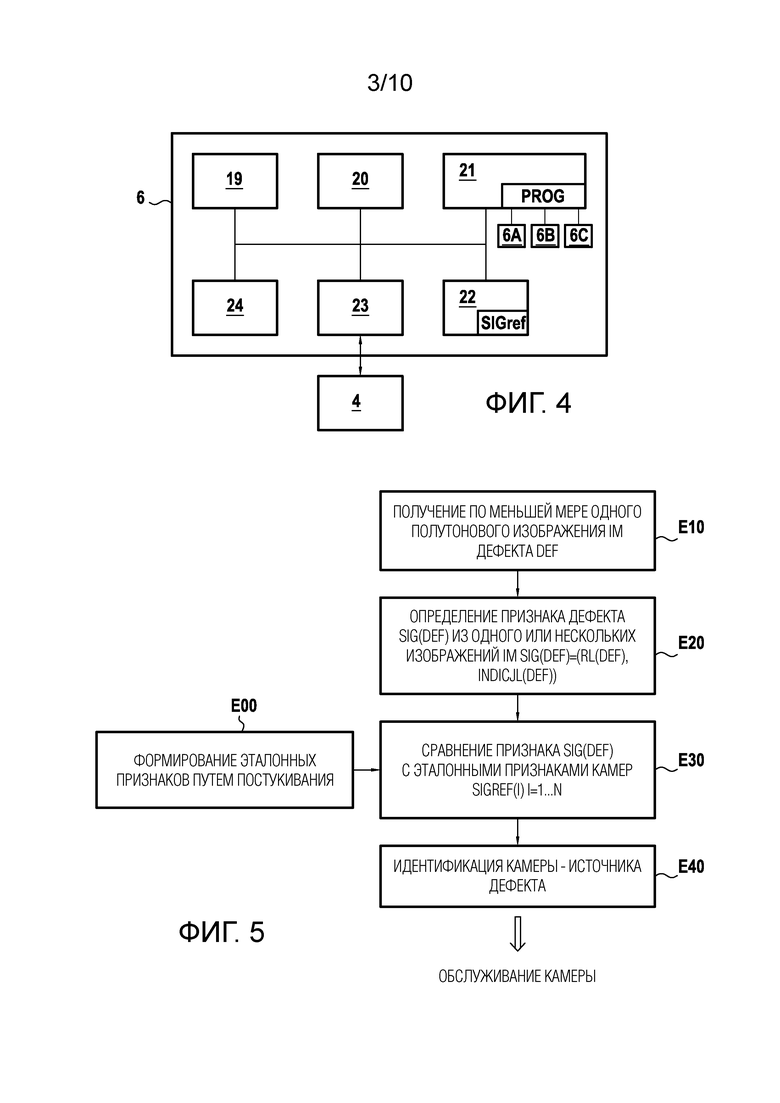
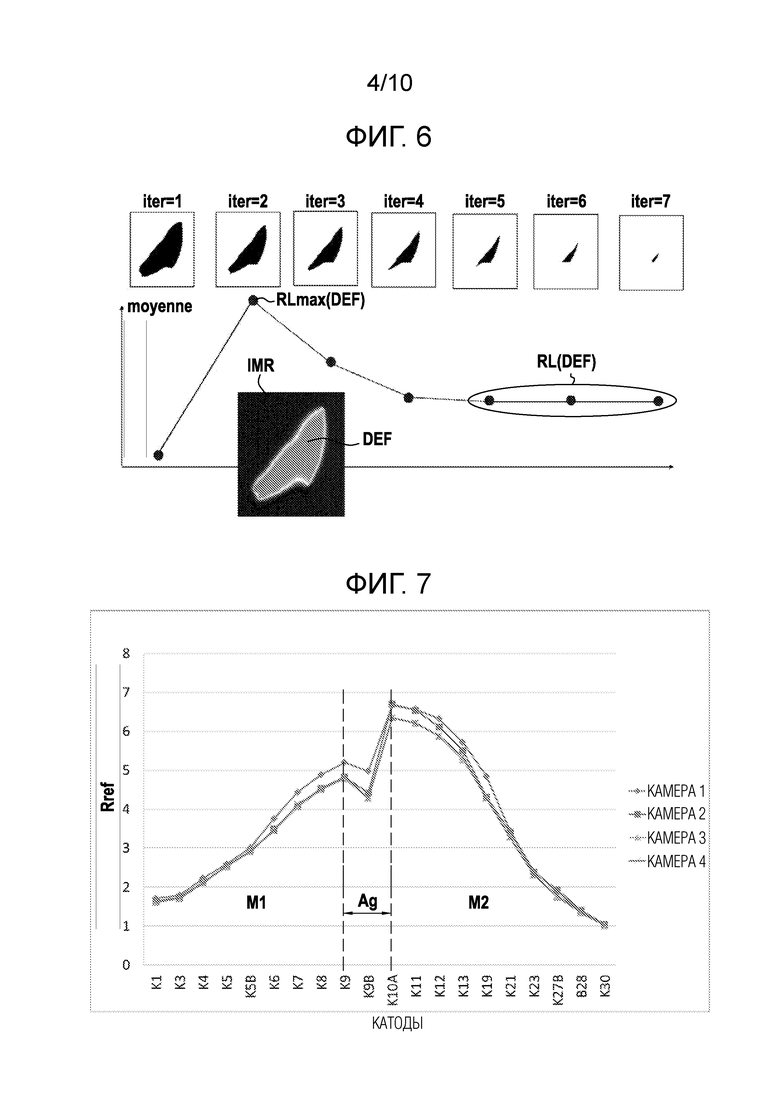
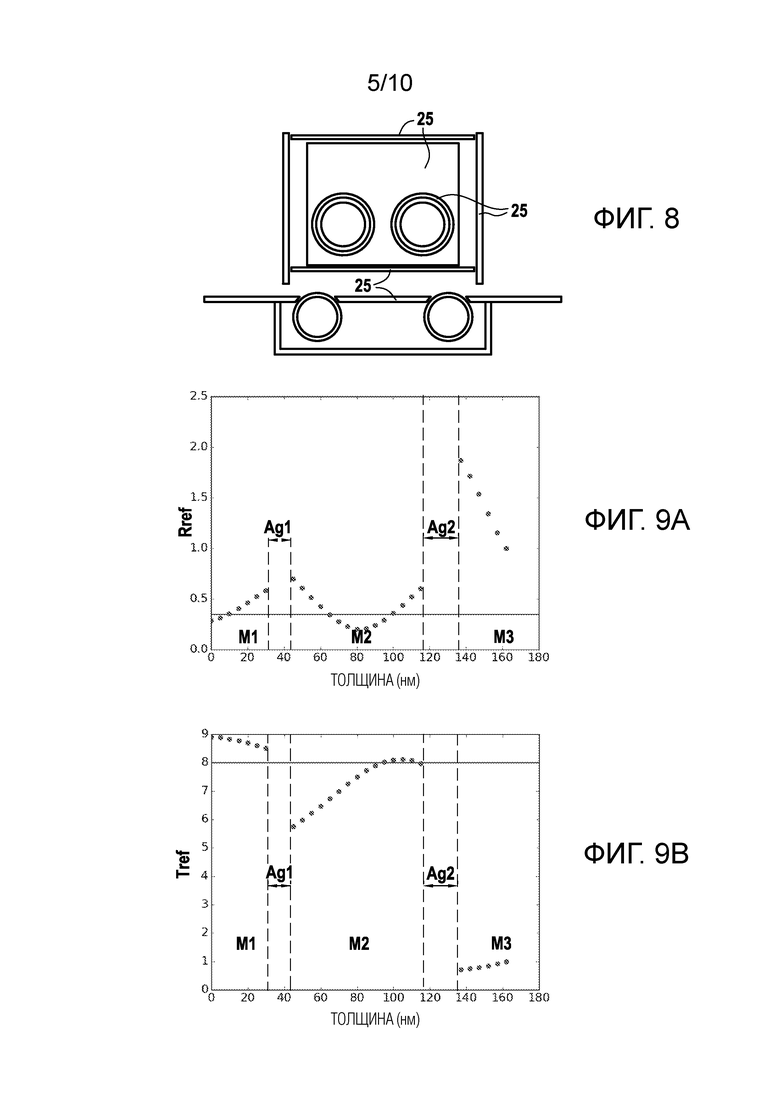

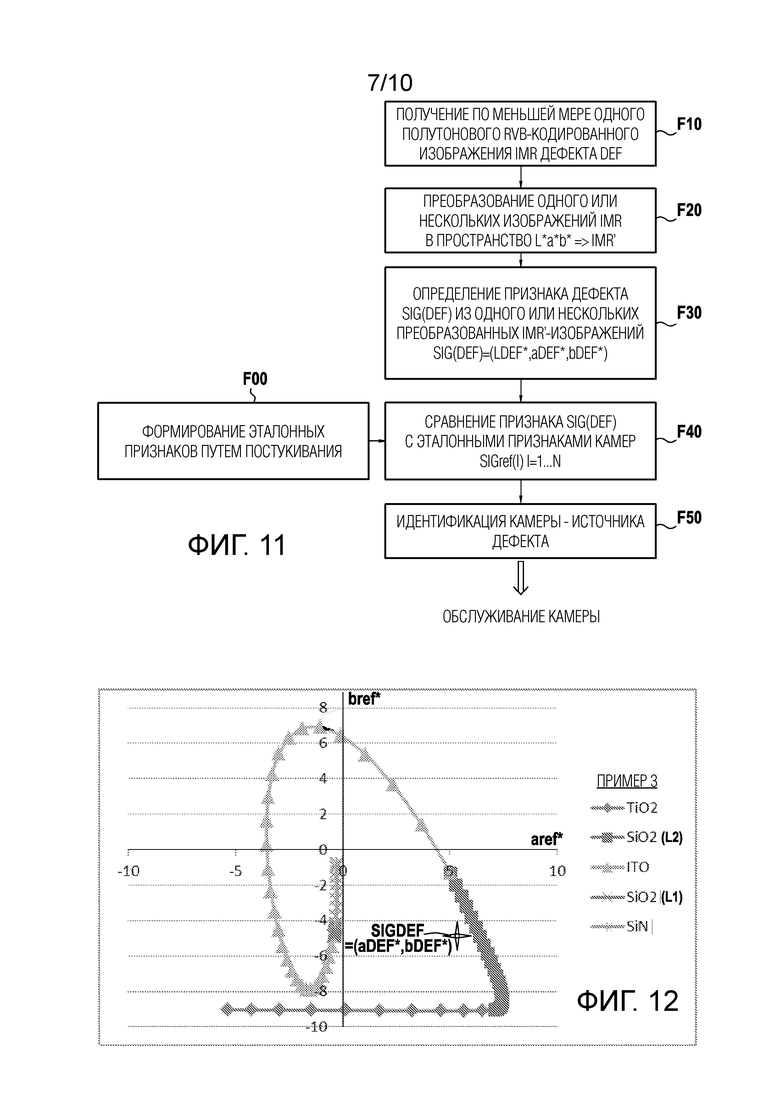
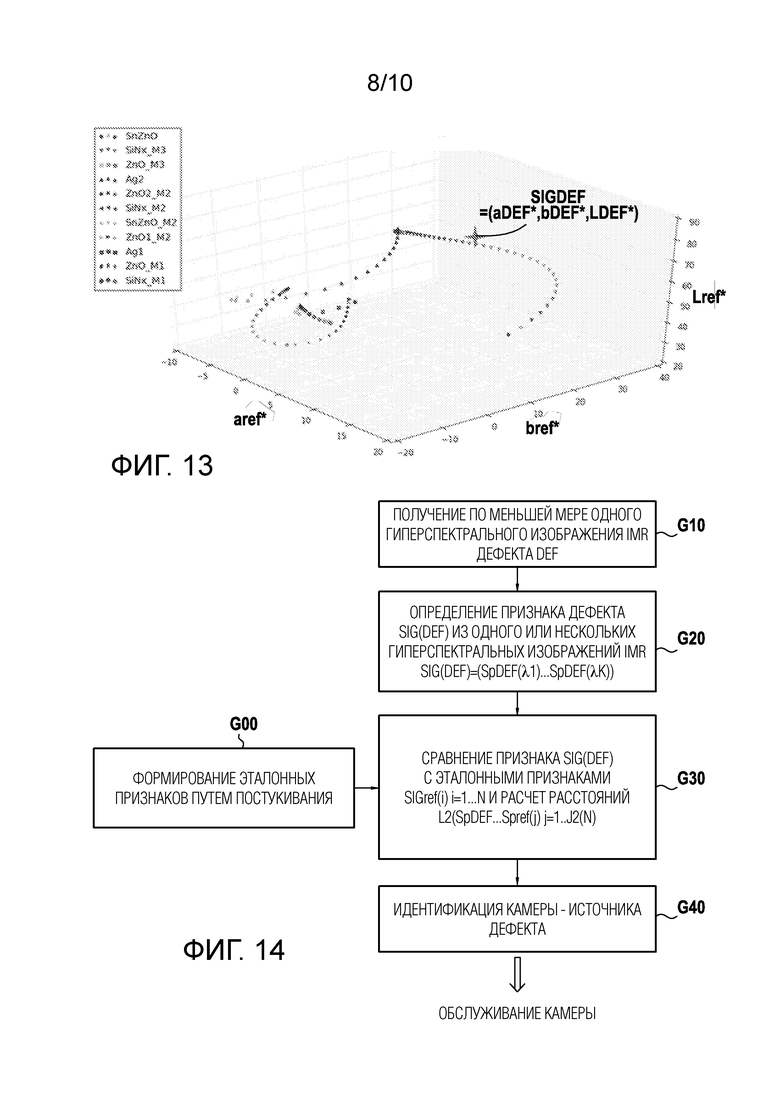
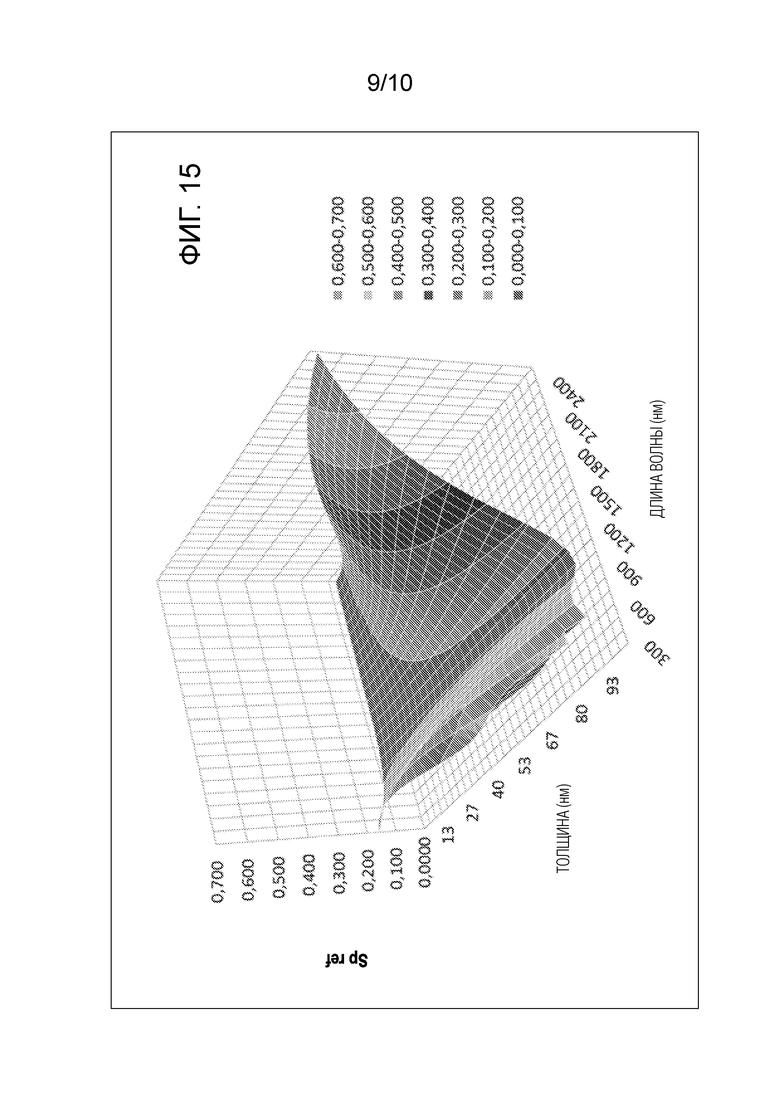
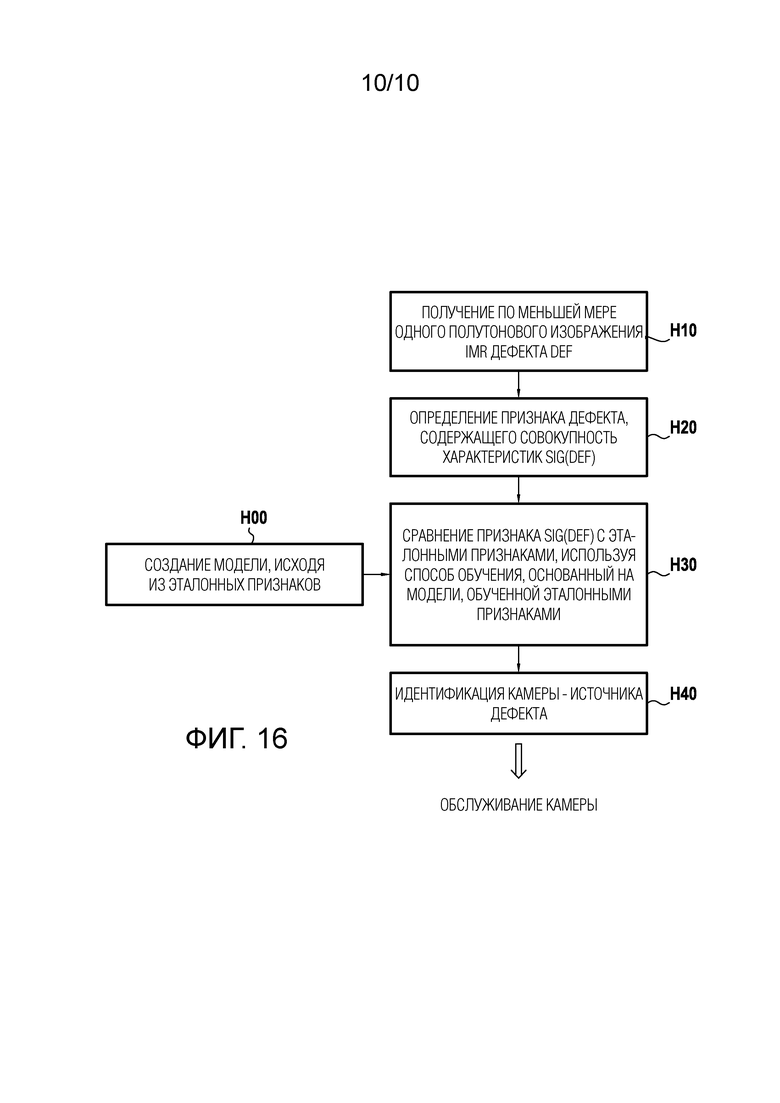
Изобретение относится к получению основ, в частности, прозрачных подложек из стекла или органического полимерного материала, покрытых на по меньшей мере одной стороне системой тонких слоев. Заявленный способ локализации источника дефекта в тонкослойной системе, осажденной на подложку (3), в линии осаждения (2) содержит последовательность камер (15-i), причем каждый тонкий слой материала осаждается в одной или нескольких последовательных камерах (15-i) линии осаждения, и частицы мусора, остающиеся на поверхности тонкого слоя, осажденного в камере, действуют как маски при последующем осаждении тонких слоев и являются источником дефектов. Причем указанный способ включает стадию (E10) получения по меньшей мере одного изображения, демонстрирующего указанный дефект, полученного по меньшей мере одной системой оптического контроля, находящейся на выходе линии осаждения; стадию (E20) определения из указанного по меньшей мере одного изображения признака дефекта, причем этот признак содержит по меньшей мере одну репрезентативную характеристику дефекта; и стадию (E40) идентификации по меньшей мере одной камеры линии осаждения, которая может быть источником дефекта, исходя из признака дефекта и используя эталонные признаки, ассоциированные с камерами линии осаждения. Технический результат - возможность идентифицировать небольшое число камер линии осаждения или даже единственную камеру, которая может быть источником дефектов, детектируемых на выходе линии осаждения. 4 н. и 19 з.п. ф-лы, 16 ил.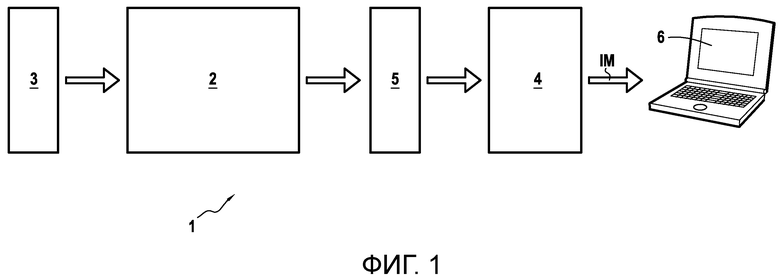
1. Способ локализации источника дефекта в тонкослойной системе, осажденной на подложку (3), в линии осаждения (2), содержащей последовательность камер (15-i), причем каждый тонкий слой материала осаждается в одной или нескольких последовательных камерах (15-i) линии осаждения, и частицы мусора, остающиеся на поверхности тонкого слоя, осажденного в камере, действуют как маски при последующем осаждении тонких слоев и являются источником дефектов, причем указанный способ включает:
- стадию (E10, F10, G10, H10) получения по меньшей мере одного изображения, демонстрирующего указанный дефект, полученного по меньшей мере одной системой оптического контроля, находящейся на выходе линии осаждения;
- стадию (E20, F30, G20, H20) определения, исходя из указанного по меньшей мере одного изображения, признака дефекта, причем этот признак содержит по меньшей мере одну репрезентативную характеристику дефекта; и
- стадию (E40, F50, G40, H40) идентификации по меньшей мере одной камеры линии осаждения, которая могла быть источником дефекта, исходя из признака дефекта и используя эталонные признаки, ассоциированные с камерами линии осаждения.
2. Способ по п. 1, причем осаждение тонких слоев на подложку (3) проводится в линии осаждения (2) посредством катодного напыления с поддержкой магнитного поля.
3. Способ по п. 1 или 2, причем подложка (3) является прозрачной подложкой из минерального стекла или из полимерного органического материала.
4. Способ по любому из пп. 1-3, причем стадия идентификации включает этап сравнения признака дефекта с совокупностью эталонных признаков, ассоциированных с камерами линии осаждения, причем указанная по меньшей мере одна камера, идентифицированная как способная быть источником дефекта, ассоциируется с признаком, соответствующим признаку дефекта.
5. Способ по любому из пп. 1-4, причем:
- указанное по меньшей мере одно изображение содержит полутоновое изображение (IMR), снятое в отражении, и признак дефекта содержит характеристику, связанную с коэффициентом отражения дефекта, который определен из изображения, полученного в отражении; и/или
- указанное по меньшей мере одно изображение содержит полутоновое изображение (IMT), сделанное в пропускании, и признак дефекта содержит характеристику, связанную с коэффициентом пропускания дефекта, который определен из изображения, полученного в пропускании.
6. Способ по п. 5, причем указанный коэффициент определяется с использованием способа последовательного размывания, примененного к дефекту, показанному в полутоновом изображении.
7. Способ по п. 5 или 6, дополнительно включающий:
- стадию определения градиента изменения коэффициента и
- стадию детектирования формы дефекта на основе определенного градиента изменения.
8. Способ по любому из пп. 5-7, включающий стадию обнаружения наличия светлого кольца по периметру дефекта, показанного на указанном по меньшей мере одном изображении, причем признак дефекта содержит характеристику, отражающую это присутствие.
9. Способ по любому из пп. 1-8, причем указанное по меньшей мере одно изображение содержит два полутоновых изображения, полученные указанной по меньшей мере одной оптической системой с использованием двух источников излучения, излучающих в двух по меньшей мере частично отличающихся диапазонах длин волн.
10. Способ по любому из пп. 1-4, причем:
- указанное по меньшей мере одно изображение содержит изображение, кодированное в основных цветах (RGB-изображение), снятое в отражении или в пропускании;
- кроме того, способ включает стадию преобразования (F10) RGB-изображения в цветовое пространство L*a*b*; и
- признак дефекта содержит компоненты a* и b* базовой поверхности дефекта, определенные из преобразованного изображения.
11. Способ по п. 10, причем признак дефекта включает дополнительно компонент дефекта L*, который определен из преобразованного изображения.
12. Способ по любому из пп. 1-4, причем указанное по меньшей мере одно изображение содержит гиперспектральное изображение, и признак дефекта содержит спектр, представляющий значения коэффициента отражения или коэффициента пропускания базовой поверхности дефекта как функцию длины волны.
13. Способ по п. 12, причем каждый эталонный признак, ассоциированный с камерой линии осаждения, содержит совокупность спектров, соответствующих разным толщинам слоя, осажденного в указанной камере.
14. Способ по любому из пп. 1-13, причем эталонные признаки, ассоциированные с камерами линии осаждения, определяют экспериментально (E00, F00, G00) путем постукивания по каждой камере, чтобы образовать в каждой камере частицы мусора в результате постукивания.
15. Способ по любому из пп. 1-3, причем стадия идентификации (H40) включает применение (H30) метода машинного обучения к признаку дефекта, и причем указанный метод обучения основан на модели (H00), обучаемой с использованием эталонных признаков, ассоциированных с камерами линии осаждения.
16. Способ по п. 1 или 15, причем признак дефекта, определенный из указанного по меньшей мере одного изображения, содержит по меньшей мере одну характеристику интенсивности свечения дефекта и/или характеристику, относящуюся к форме дефекта.
17. Способ по п. 16, причем указанная по меньшей мере одна характеристика интенсивности свечения дефекта включает:
- характеристики, отражающие радиальный профиль интенсивности свечения дефекта, и/или
- характеристики, отражающие крутизну радиального профиля интенсивности свечения дефекта, и/или
- характеристику, отражающую среднюю интенсивность свечения дефекта, и/или
- характеристику, отражающую интенсивность свечения в центре дефекта.
18. Способ по п. 16 или 17, причем указанная по меньшей мере одна характеристика, относящаяся к форме дефекта, содержит:
- характеристику, отражающую площадь дефекта, и/или
- характеристику, отражающую отношение периметра дефекта к площади дефекта, и/или
- характеристику, отражающую коэффициент формы дефекта.
19. Способ по любому из пп. 1-18, причем тонкослойная система образует интерференционную систему.
20. Способ по любому из пп. 1-19, причем эталонные признаки, ассоциированные с камерами линии осаждения, зависят от параметризации линии осаждения во время осаждения тонких слоев на подложку.
21. Машиночитаемый носитель записи, на котором хранится компьютерная программа, содержащая инструкции для исполнения стадий способа локализации по любому из пп. 1-20, когда указанная программа выполняется компьютером.
22. Устройство (6) локализации источника дефекта тонкослойной системы, осажденной на подложку (3), в совокупности камер, следующих друг за другом в линии осаждения (2), где каждый тонкий слой материала осаждается в одной или более последовательных камерах (15-i) линии осаждения, и частицы мусора, остающиеся на поверхности тонкого слоя, осажденного в камере, действуют как маски при последующем осаждении тонких слоев и являются источником дефектов, причем указанное устройство содержит:
- модуль (6A) получения по меньшей мере одного изображения, показывающего указанный дефект, полученного по меньшей мере одной системой оптического контроля, размещенной на выходе линии осаждения;
- модуль (6B) определения, исходя из указанного по меньшей мере одного изображения, признака дефекта, причем этот признак включает по меньшей мере одну репрезентативную характеристику дефекта; и
- модуль (6C) идентификации по меньшей мере одной камеры линии осаждения, ответственной за возникновение дефекта, исходя из признака дефекта и используя эталонные признаки, ассоциированные с камерами линии осаждения.
23. Система (1) осаждения тонкослойной системы на подложку, содержащая:
- линию осаждения (2), содержащую последовательность камер (15-i), способных осаждать тонкослойную систему на подложку (3), где каждый тонкий слой материала осаждается в одной или более последовательных камерах (15-i) линии осаждения, и частицы мусора, остающиеся на поверхности тонкого слоя, осажденного в камере, действуют как маски при последующем осаждении тонких слоев и являются источником дефектов;
- по меньшей мере одну систему оптического контроля (4), размещенную на выходе линии осаждения и способную выдавать по меньшей мере одно изображение, показывающее дефект тонкослойной системы, осажденной на подложку; и
- устройство локализации (6) по п. 22, способное идентифицировать среди последовательности камер линии осаждения по меньшей мере одну камеру, которая может быть источником дефекта.
| US 20100266195 A1, 21.10.2010 | |||
| US 20100054577 A1, 04.03.2010 | |||
| US 20030073010 A1, 17.04.2003 | |||
| US 9251581 B1, 02.02.2016. |

