Область техники
[1] Настоящее изобретение относится к структуре для возбуждения вибраций в белье в устройстве для обработки белья.
Предшествующий уровень техники
[2] Термин "устройство для обработки белья" относится к устройствам любого типа для содержания или обработки белья, например, стирки, сушки и глажения как в домашних условиях, так и в прачечной. К примерам устройств для обработки белья относятся стиральная машина для стирки белья, сушилка для сушки белья, стирально-сушильная машина, которая выполняет и стирку, и сушку белья, освежитель для освежения белья и отпариватель для удаления ненужных складок с белья.
[3] Более конкретно, освежитель является устройством, применяемым для придания белью свежести, которое выполняет такие функции как сушка белья, ароматизацию белья, предотвращения электростатического слипания белья, удаления складок с белья и т.п. Отпариватель обычно является устройством, подающим на белье пар для удаления с нее складок, которое позволяет более деликатно удалять складки без прикосновения к белью горячей плиты, такой, как традиционный утюг. Известно устройство для обработки белья оснащенное функциями и освежителя, и отпаривателя для удаления складок и захваченных бельем запахов с помощью пара и горячего воздуха.
[4] Известно также устройство для обработки белья, которое разглаживает складки в белье путем возбуждения вибраций (возвратно-поступательных движений) в модуле вешалки в заданном направлении.
[5] [Документ предшествующего уровня техники]
[6] [Патентный документ]
[7] Корейская зарегистрированная патентная публикация № 10-1525568.
Раскрытие
Техническая задача
[8] Согласно первому аспекту настоящего изобретения модуль вешалки приводят в колебательные движения, подстраивая ее к различным частотам и амплитудам колебаний, когда модуль вешалки совершает колебательные движения.
[9] Проблемой известных решений является то, что амплитуду удерживают постоянной, даже если частота колебаний модуля вешалки меняется, что приводит к возникновению напряжений в изделиях. Согласно второму аспекту настоящего изобретения эту задачу решают, уменьшая напряжения в изделиях, созданные изменением частоты.
[10] Другая проблема известных решений заключается в том, что когда частота колебаний увеличивается, при том, что амплитуда остается постоянной, когда модуль вешалки трясется, это налагает физическое ограничение (т.е., силу трения) и требует избыточного количества энергии для генерирования вибраций и, следовательно, максимальная частота вибраций не может превысить определенного предела. Третий аспект настоящего изобретения решает эту проблему.
[11] Еще одна проблема известных решений заключается в том, что, если, когда основная часть вешалки колеблется с высокой частотой, амплитуда поддерживается высокой, в белье возникают избыточные напряжения, которые даже могут привести к падению белья с модуля вешалки или к повреждению белья. Четвертый аспект настоящего изобретения заключается в значительном повышении частоты колебаний без падения белья и без ее повреждения.
[12] Еще одной проблемой известных решений является возникновение колебаний в направлениях, не совпадающих с направлением колебаний модуля вешалки. Пятый аспект настоящего изобретения минимизирует ненужные колебания, решая эту проблему.
[13]
Техническое решение
[14] Для решения описанных проблем устройство для обработки белья по иллюстративному варианту настоящего изобретения содержит: раму; основную часть вешалки, выполненную с возможностью движения относительно рамы и предназначенное для подвешивания белья или вешалок для белья; вибратор, который генерирует колебания и содержит по меньшей мере одну эксцентрик, вращающийся вокруг по меньшей мере одной оси вращения так, чтобы груз находился не в центре, и соединенный с основной частью вешалки для передачи колебаний№ и по меньшей мере один упругий элемент, прилагающий упругую силу к вибратору, когда вибратор колеблется, в котором угловая скорость эксцентрика является изменяемой.
[15] В течение заданного времени или дольше можно поддерживать две разные угловые скорости.
[16] Устройство для обработки белья может быть выполнено с возможностью работать в первом режиме, в котором частота колебаний основной части вешалки относительно низка, а амплитуда относительно высока, и во втором режиме, в котором частота колебаний основной части вешалки относительно велика, а амплитуда - относительно мала, изменяя и регулируя угловую скорость.
[17] Частоту колебаний для первого режима можно задавать так, чтобы она была ближе к собственной частоте колебаний, чем частота колебаний для второго режима.
[18] Амплитуду колебаний основной части вешалки в установившемся режиме можно задавать так, чтобы она имела пиковую величину, когда угловая скорость имеет конкретную величину больше нуля.
[19] Один конец упругого элемента может быть закреплен на вибрационном модуле. Устройство для обработки белья далее может содержать поддерживающий элемент, прикрепленный к раме, к которому крепится второй конец упругого элемента.
[20] Упомянутый по меньшей мере один упругий элемент может содержать: первый упругий элемент, который упруго деформируется, когда вибратор движется в одну сторону в направлении колебаний, и второй упругий элемент, который упруго деформируется, когда вибратор движется в другую сторону.
[21] Упомянутый по меньшей мере один эксцентрик может содержать: первый эксцентрик, который вращается вокруг заданной первой оси вращения так, чтобы груз находился не в центре; и второй эксцентрик, который вращается вокруг заданной второй оси вращения, которая совпадает в первой осью вращения или параллельна ей, так, чтобы груз находился не в центре.
[22] Вибратор может быть выполнен так, чтобы вращаться вокруг заданной центральной оси, когда положение относительно рамы фиксировано. Первая ось вращения и вторая ось вращения могут быть разнесены друг от друга в противоположных направлениях относительно центральной оси.
[23] Основная часть вешалки может быть выполнена с возможностью движения относительно рамы в заданном направлении колебаний. Упругий элемент может быть выполнен с возможностью упругой деформации или восстанавливать упругость, когда основная часть вешалки движется в направлении колебаний.
[Положительные эффекты]
[24] Среди вышеописанных мер по решению проблем, рисунок колебаний основной части вешалки можно менять, только меняя угловую скорость эксцентрика и, поэтому белье можно обрабатывать более эффективно, и основная часть вешалки может иметь рисунок колебаний, соответствующий предпочтениям пользователя, типу белья и т.п.
[25] Колебательные движения основной части вешалки могут иметь два или более установившихся режима, поддерживая две или более угловые скорости в течение заданного времени или дольше.
[26] Имеются первый режим, в котором частота колебаний основной части вешалки относительно низка, а амплитуда относительно велика, и второй режим, в котором частота колебаний основной части вешалки относительно высока, а амплитуда относительно мала. Поэтому белье может колебаться медленно с большой амплитудой в первом режиме, или быстро, без встряхивания, с малой амплитудой во втором режиме. Кроме того, даже при увеличении частоты колебаний основной части вешалки, в изделиях будут возникать меньшие напряжения, белье не будет спадать или повреждаться, и количество энергии, идущей на генерирование колебаний, будет существенно снижено. Помимо этого, максимальную частоту колебаний основной части вешалки можно значительно увеличить без физических ограничений.
[27] Основную часть вешалки можно подстраивать под различные частоты и амплитуды колебаний, поскольку амплитуда колебаний основной части вешалки в установившемся режиме заранее задана на пиковую величину, когда угловая скорость имеет конкретную величину больше нуля.
[28] Первый режим характеризуется большей амплитудой, а второй режим характеризуется большей частотой колебаний без создания напряжений в предметах, поскольку частота колебаний в первом режиме задана ближе к собственной частоте колебаний, чем частота колебаний во втором режиме.
[29] Можно минимизировать ненужные колебания, возникающие в направлении, пересекающем направление колебаний основной части вешалки, благодаря наличию первого эксцентрика и второго эксцентрика.
[30] Поскольку первая ось вращения и вторая ось вращения разнесены от центральной оси в противоположных направлениях, вибратор смещен в одну сторону от центральной оси, тем самым снижая риск создания напряжений в структуре.
Описание чертежей
[31] Фиг.1 - вид в перспективе устройства 1 для обработки белья по иллюстративному варианту настоящего изобретения.
[32] Фиг.2 - график и концептуальная диаграмма, показывающая как амплитуда X(w) основной части 31 вешалки изменяется с угловой скоростью (w) эксцентрика вибратора 50 по фиг.1.
[33] Фиг.3a-7d - концептуальные диаграммы, показывающие принцип работы вибратора 50 по фиг.1: фиг.3a и 3b - виды, показывающие принцип работы вибратора 150 по первому иллюстративному варианту; фиг.4a-4d - виды, показывающие принцип работы вибратора 250 по второму иллюстративному варианту; фиг.5a и 5b - виды, показывающие принцип работы вибратора 350 по третьему иллюстративному варианту; фиг.6a-6d - виды, показывающие принцип работы вибратора 450 по четвертому иллюстративному варианту; фиг.7a-7d виды, показывающие принцип работы вибратора 550 по пятому иллюстративному варианту;
[34] Фиг.8 - частичный структурный вид в перспективе вибратора 250, упругого элемента 260 и поддерживающего элемента 270 по второму иллюстративном варианту по фиг.4a-4d, где внешняя рама 11b не показана.
[35] Фиг.9 - вид сверху структурного примера по фиг.8.
[36] Фиг.10 - вид вибратора 250, упругого элемента 260, поддерживающего элемента 270 и модуля 230 вешалки по структурному примеру по фиг.9, и частичное горизонтальное сечение узла 258 привода модуля вешалки и ведомого узла 231b, вешалки по линии S1-S1'.
[37] Фиг.11 - частичный вид в перспективе, показывающий структурный пример вибратора 450, упругого элемента 460 и поддерживающего элемента 470 по четвертому иллюстративному варианту по фиг.6a-6d, где внешняя рама 11b не показана.
[38] Фиг.12 - вид сверху структурного примера по фиг.11.
[39] Фиг.13 - вид в перспективе вибратора 450, упругого элемента 460, поддерживающего элемента 470 и модуля вешалки 430 по структурному примеру по фиг.11, и частичное горизонтальное сечение узла 458 привода модуля вешалки и ведомого узла 431b вешалки по линии S3-S3'.
[40] Фиг.14 - вертикальное сечение структурного примера по фиг.11 по линии S2-S2'.
[41] Фиг.15 - разнесенный вид в перспективе оперативной структуры первого эксцентрика 55 и второго эксцентрика 56 вибратора 250 и 450 по фиг.8-14.
[42] Фиг.16 - вертикальное сечение элементов фиг.15 в собранном состоянии.
[43] Фиг.17 - частичный вид в перспективе, показывающий структурный пример вибратора 550, упругого элемента 550 и поддерживающего элемента 570 по пятому иллюстративному варианту по фиг.7a-7d, где рама 11b не показана.
[44] Фиг.18 - вид сверху структурного примера по фиг.17.
[45] Фиг.19 - вид вибратора 550, упругого элемента 560, поддерживающего элемента 570 и вешалки 430 по структурному примеру по фиг.17 и частичное горизонтальное сечение узла 558 привода модуля вешалки и ведомого узла 531b вешалки по линии S4-S4'.
[46] Фиг.20 - вид в перспективе вибратора 550, упругого элемента 560, поддерживающего элемента 570 по структурному примеру по фиг.19 в собранном состоянии.
[47] Фиг.21 - вид в перспективе вибратора 550, упругого элемента 560 и поддерживающего элемента 570 по структурному примеру по фиг.20 в разобранном состоянии.
[48] Фиг.22 - разнесенный вид в перспективе вибратора 550 по структурному примеру по фиг.21.
[49] Фиг.23 - вертикальное сечение вибратора 550, упругого элемента 560 и поддерживающего элемента 570 по фиг.20 по линии S2-S2'.
[50] Фиг.24 - вид трансмиссии 553, первого эксцентрика 55 и второго эксцентрика 56 по фиг.23, если смотреть сверху.
Подробное описание изобретения
[51] Далее следует подробное описание изобретения, в котором используется пространственная ортогональная система координат, в которой оси X, Y и Z ортогональны друг другу. Каждое осевое направление (направление оси X, направление оси Y, направление оси Z) относится к двум направлениям, в которых проходит каждая ось. Каждое направление со знаком "+" перед ним (направление +X, направление +Y, направление +Z) является положительным направлением, являющимся одним из двух направлений, в которых проходит каждая ось. Каждое направление со знаком "-" перед ним (направление -X, направление -Y, направление -Z) является отрицательным направлением, являющимся одним из двух направлений, в которых проходит каждая ось.
[52] Термины, применяемые ниже для обозначения направлений, такие как вперед (+Y), назад (-Y), влево (+X), вправо (-X), вверх (+Z), вниз (-Z), определены осями X, Y, Z системы координат, но они применяются только для лучшего понимания настоящего изобретения и очевидно, что такие направления можно определить иначе в зависимости от точки отсчета.
[53] Термины с предшествующими им порядковыми номерами, такими как "первый", "второй", "третий" и т.д. используются для описания составляющих элементов, применяются только во избежание путаницы и не связаны с порядком, важностью или отношением между такими элементами. Например, возможен вариант, содержащий только второй элемент и не содержащий первого элемента.
[54] Единственное число, в котором указаны элементы, включает также и множественное число если контекст явно не требует иного.
[55] Устройство 1 для обработки белья по иллюстративному варианту настоящего изобретения содержит каркас 10, установленный на полу внешней стороной, или прикрепленный к стене внешней стороной. Каркас 10 имеет пространство 10s для обработки, в которое помещается белье. Устройство 1 для обработки белья содержит нагнетатель 20 для подачи на белье по меньшей мере одного из следующих веществ: воздух, пар, дезодорант и антистатик. Устройство 1 для обработки белья содержит модуль 30, 230 и 430 вешалки, предназначенный для подвешивания белья или вешалок для белья. Модуль 30, 230, 430 вешалки поддерживается на каркасе 10. Устройство 1 для обработки белья содержит вибратор 50, 250, 350, 450 и 550 для генерирования колебаний. Вибратор 50, 250, 350, 450 и 550 передает колебания на модуль 30, 230 и 430 вешалки. Устройство 1 для обработки белья содержит по меньшей мере один упругий элемент 60, 260, 460 и 560, выполненный с возможностью упругой деформации и восстановления упругости, когда модуль 30, 230 и 430 вешалки движется. Упругий элемент 60, 260, 360 и 460 выполнен с возможностью упругой деформации и восстановления упругости, когда вибратор 50, 150, 250, 350, 450 и 550 движется. Устройство 1 для обработки белья содержит поддерживающий элемент 270, 470 и 570 для поддержки одного конца упругого элемента 60, 260,460 и 560. Поддерживающий элемент 270, 470 и 570 может подвижно поддерживать вибратор 50, 250, 350, 450 и 550. Поддерживающий элемент 270, 470 и 570 может быть прикреплен к каркасу 10. Устройство 1 для обработки белья может содержать управляющую часть (не показана) для управления нагнетательной частью 20. Управляющая часть может управлять включением и выключением вибратора 50, 250, 350, 450 и 550 и режимом его работы. Устройство 1 для обработки белья может далее содержать датчик распознавания белья (не показан) для обнаружения белья, находящейся в пространстве 10s для обработки.
[56] Как показано на фиг.1, каркас 10 формирует внешний вид. Каркас 10 имеет пространство 10s, в котором находится белье. Каркас 10 содержит верхнюю раму 11, образующую верхнюю сторону, боковую раму 12, образующую левую и правую стороны, и заднюю раму (не показана), образующую заднюю строну. Каркас 10 содержит раму основания (не показана), образующую нижнюю сторону.
[57] Каркас 10 может содержать внутреннюю раму 11a, образующую внутреннюю сторону, и внешнюю раму 11b, образующую внешнюю сторону. Внутренняя сторона внутренней рамы 11a образует пространство 10s для обработки. Между внутренней рамой 11a и внешней рамой 11 расположено конфигурационное пространство 11s. В конфигурационном пространстве 11s может находиться вибратор 50, 250, 350, 450 и 550. В конфигурационном пространстве 11s может находиться упругий элемент 60, 260, 460 и 560 и поддерживающий элемент 270, 470 и 570.
[58] Пространство 10s для обработки - это пространство, в котором воздух (например, горячий воздух), пар, дезодорант и/или антистатик наносятся на белье для изменения физических или химических свойств белья. Белье может обрабатываться в пространстве 10s для обработки разными способами, например, подачей горячего воздуха на белье в пространстве 10s для обработки для сушки белья, обработкой паром для удаления складок, распылением дезодоранта для ароматизации белья, распылением антистатика для предотвращения слипания белья под действием статического электричества.
[59] По меньшей мере часть модуля 30, 230, и 430 вешалки расположена внутри пространства 10s для обработки. Основная часть 31, 231, 431 вешалки расположена в пространстве 10s для обработки. Одна сторона пространства 10s для обработки открыта так, чтобы белье можно было закладывать и вынимать, и открытая сторона открывается и закрывается дверцей 15. Когда дверца 15 закрыта, пространство 10s изолируется от внешней среды, а когда дверца 15 открыта, пространство 10s становится доступным снаружи.
[60] Как показано на фиг.1, нагнетатель 20 может подавать воздух в пространство 10s для обработки. Подавая воздух в пространство 10s нагнетатель 20 может создавать его циркуляцию. Более конкретно, нагнетатель 20 может засасывать воздух изнутри пространство 10s для обработки и выпускать его в пространство 10s для обработки. Нагнетатель 20 может подавать внешний воздух в пространство 10s для обработки.
[61] Нагнетатель 20 может подавать в пространство 10s для обработки воздух, который подвергся заданному процессу обработки. Например, нагнетатель 20 может подавать в пространство 10s для обработки нагретый воздух. Нагнетатель 20 также может подавать в пространство 10s для обработки охлажденный воздух. Кроме того, нагнетатель 20 может подавать в пространство 10s для обработки необработанный воздух. Далее, нагнетатель 20 может добавлять в воздух пар, дезодорант или антистатик и подавать этот воздух в пространство 10s для обработки.
[62] Нагнетатель может иметь отверстие 20a для забора воздуха, через которое воздух засасывается изнутри пространства 10s для обработки. Нагнетатель может содержать выпускное отверстие 20b, через которое воздух выпускается в пространство 10s для обработки. Воздух, засасываемый через отверстие 20a, может выпускаться через выпускное отверстие 20b после заданной обработки. Нагнетатель 20 может содержать паровой носик 20c для распыления пара в пространство 10s для обработки. Нагнетатель 20 может содержать нагреватель (не показан) для нагревания воздуха. Нагнетатель 20 может содержать фильтр (не показан) для фильтрования засосанного воздуха. Нагнетатель 20 может содержать вентилятор (не показан) для сжатия воздуха.
[63] Воздух и/или пар, подаваемый нагнетательной частью 20, попадает на белье, находящуюся в пространстве 10s для обработки, и влияет на физические или химические свойства белья. Например, горячий воздух или пар расслабляет структуру белья так, что складки разглаживаются и неприятный запах исчезает, когда молекулы этого запаха в белье вступают в реакцию с паром. Дополнительно, горячий воздух и/или пар, генерируемый в нагнетательной части 20, могут стерилизовать белье, убивая имеющиеся в ней бактерии.
[64] Как показано на фиг.1, 10 13, 14 и 19, модуль 30, 230 и 430 вешалки может находиться над пространством 10s для обработки. Модуль 30, 230, 430 вешалки предназначен для подвешивания белья или вешалок для белья. Модуль 30, 230, 430 вешалки соединен с вибратором 50, 150, 250, 350, 450 и 550 и совершает колебания, передаваемые от вибратора 50, 150, 250, 350, 450 и 550.
[65] Модуль 30, 230, 430 вешалки содержит основную часть 31, 231, 431 вешалки, предназначенную для подвешивания белья или вешалок для белья. В этом иллюстративном варианте основная часть 31, 231, 431 вешалки может быть сформирована с запирающими канавками 31a для подвешивания вешалок для белья, а в другом иллюстративном варианте основная часть 31, 321, 431 вешалки может быть сформирована с крюками (не показаны) или подобными элементами так, чтобы вешать белье непосредственно на них.
[66] Основная часть 31, 231, 431 вешалки поддерживается каркасом 10. Основная часть 31, 231, 431 вешалки может быть соединена с каркасом 10 через приводную часть 33 и поддерживающую часть 35 вешалки. Основная часть 31, 231, 431 вешалки выполнена с возможностью движения относительно каркаса 10. Основная часть 31, 231, 431 вешалки выполнена с возможностью движения (совершения колебаний) относительно каркаса 10 в заданном направлении колебаний (+X, -X). Основная часть 31, 231, 431 вешалки может совершать колебания относительно каркаса 10 в направлении колебаний (+X, -X). Основная часть 31, 231, 431 вешалки совершает возвратно-поступательные движения в направлении колебаний (+X, -X) под действием вибратора 50, 150, 250, 350, 450 и 550. Основная часть 31, 231, 431 вешалки совершает возвратно-поступательные движения, будучи подвешенной в верхней части пространства 10s для обработки.
[67] Основная часть 31, 231, 431 вешалки может проходить продольно в направлении колебаний (+X, -X). На верхней стороне основной части 31, 231, 431 вешалки может быть расположено множество запирающих канавок 31a, разнесенных друг от друга в направлении колебаний (+X, -X). Запирающие канавки 31a могут проходить в направлении (+Y, -Y), пересекающем направление колебаний (+X, -X).
[68] Модуль 30, 230, 430 вешалки может содержать приводную часть 33, который поддерживает основнаую часть 31, 231, 431 вешалки с возможностью движения. Приводная часть 33 подвижна в направлении колебаний (+X, -X). Приводная часть 33 может быть изготовлена из упругого материала так, чтобы приводить в движение основную часть 31, 231, 431 вешалки. Приводная часть 33 может содержать упругий элемент, который упруго деформируется, когда основная часть 31, 231, 431 вешалки движется. Верхний конец приводной части 33 прикреплен к каркасу 10, а нижний конец прикреплен к основной части 31, 231, 431 вешалки. Приводная часть 33 может проходить вертикально. Верхний конец приводной части 33 опирается на поддерживающую часть 35. Приводная часть 33 соединяет поддерживающую часть 35 и основную часть 31, 231, 431 вешалки. Приводная часть 33 выполнена с возможностью вертикального проникновения в направляющую часть 37 вешалки. Длина горизонтального сечения приводной части 33 в направлении колебаний (+X, -X) меньше, чем его длина в направлении (+Y, -Y), перпендикулярном направлению колебаний (+X, -X).
[69] Модуль 30, 230, 430 вешалки содержит поддерживающую часть 35, прикрепленную к каркасу 10. Поддерживающая часть 35 крепит приводную часть 33 к каркасу 10. Поддерживающая часть 35 может быть прикреплена к внутренней раме 11a. Верхний конец приводной части 22 может быть заперт на поддерживающей части 35 и свисать с нее. Поддерживающая часть 35 может быть сформирована в форме горизонтальной пластины, и приводная часть 33 может быть выполнена с возможностью проникать в поддерживающую часть 35.
[70] Модуль 30, 230, 430 вешалки далее может содержать направляющую часть 37 вешалки для направления приводной части 33. Направляющая часть 37 прикреплена к каркасу 10. Зазор между верхней стороной направляющей части 37 вешалки и приводной частью 33 вешалки может быть уплотнен. Нижняя сторона направляющей части 37 вешалки имеет обращенное вверх углубление, и приводная часть 33 вешалки может двигаться в направлении колебаний (+X, -X) внутри обращенного вверх углубления направляющей части 37 вешалки.
[71] Вибратор 50, 150, 250, 350, 450 и 550 содержит узел 258, 458, 558 привода вешалки, соединенный с модулем 30, 230, 430 вешалки. Основная часть 31, 231, 431 вешалки содержит ведомый узел 231b и 431b, соединенный с узлом 258, 458 и 558 привода вешалки.
[72] Далее со ссылками на фиг.10, следует описание узла 258 привода вешалки и ведомого узла 231b. Узел 258 привода вешалки соединяет и удерживает соединенными вибратор 150, 250 и основную часть 231 вешалки. Узел 258 привода вешалки может соединять и удерживать соединенными нижнюю сторону вибратора 150, 250 и центр основной части 231 вешалки. Поэтому вибратор 150 и 250 и основная часть 231 вешалки совершают колебания как единый узел.
[73] Узел 258 привода вешалки по иллюстративному варианту настоящего изобретения может проходить параллельно центральной оси Oc. Узел 258 привода вешалки может иметь форму прутка. Узел 258 привода вешалки может проходить вдоль заданной соединительной оси Oh, которая будет описана ниже. Узел 258 привода вешалки может быть расположен на соединительной оси Oh. Ведомый узел 231b вешалки может иметь форму короба с открытым верхом. Узел 258 привода вешалки прикреплен к ведомому узлу 231b вешалки. Верхний конец узла 258 привода вешалки прикреплен к ведомому узлу 231b вешалки. Верхний конец узла 258 привода вешалки прикреплен к вибратору 150, 250, а нижний конец прикреплен к ведомому узлу 231b вешалки. Когда узел 258 привода вешалки, прикрепленный к ведомому узлу 231b вешалки совершает возвратно-поступательные движения в направлении колебаний (+X, -X) вибратора 150, 250, основная часть 231 вешалки совершает возвратно-поступательные движения в направлении колебаний (+X, -X) интегрально с вибратором 150, 250. В частичном сечении на фиг.10 направление, в котором узел 258 привода вешалки совершает линейные возвратно-поступательные движения показано стрелкой и, следовательно, диапазон движений ведомого узла 231b вешалки в направлении влево-вправо (+X, -X) показан пунктирной линией.
[74] Далее, со ссылками на фиг.13, 14 и 19, следует описание узла 458 и 558 привода вешалки и ведомого узла 431b вешалки по другому иллюстративному варианту изобретения. Либо узел 458, 558 привода вешалки, либо ведомый узел 431b вешалки имеет прорезь, проходящую в направлении ((+Y, -Y), пересекающем направление колебаний (+X, -X), а другой узел имеет выступающую часть, выступающую параллельно центральной оси Oc, которая будет описана ниже, и вставленную в прорезь. В этом иллюстративном примере ведомый узел 431b имеет прорезь 431bh, которая проходит в направлении (+Y, -Y), а приводной узел 458, 558 имеет выступающую часть 458a, 558a, выступающую вниз и вставленную в прорезь 431bh. Хотя это не показано, можно привести другой пример, где приводной узел вешалки имеет прорезь, проходящую в направлении (+Y, -Y), а ведомый узел содержит часть, выступающую вверх и вставленную в прорезь приводного узла.
[75] Выступающая часть 458a, 558a по другому иллюстративному варианту выступает параллельно центральной оси Oc. Выступающая часть 458a, 558a проходит вдоль заданной соединительной оси Oh, которая будет описана ниже. Выступающая часть 458a, 558a расположена на соединительной оси Oh. Прорезь 431bh сформирована продольно в направлении (+Y, -Y), перпендикулярном направлению колебаний (+X, -X) модуля 430 вешалки. Когда выступающая часть 458a, 558a вращается относительно центральной оси Oc, будучи вставленной в прорезь 431bh, эта выступающая честь 458a, 558a движется относительно прорези 431bh в перпендикулярном направлении (+Y, -Y), заставляя основную часть 43 вешалки совершать возвратно-поступательные движения в направлении колебаний (+X, -X). В частичном сечении на фиг.13 и фиг.19 направление, в котором выступающая часть 458a, 558a, вставленная в прорезь 431bh движется по дуге (вращается) в заданном диапазоне, показано стрелкой, а диапазон движений ведомого узла 431b, колеблющегося в направлении влево-вправо (+X, -X), показан пунктирной линией.
[76] Как показано на фиг.3a-14 и 19-24, упругий элемент 60, 260, 460 и 560 выполнен с возможностью упругой деформации или восстановления упругости, когда вибратор 50, 150, 250, 350, 450, 550 совершает колебания. Упругий элемент 60, 260, 460 и 560 выполнен с возможностью упругой деформации и восстановления упругости, когда колеблющееся тело 251, 451 и 551 совершает колебания. Упругий элемент 60, 260, 460 и 560 выполнен с возможностью упругой деформации и восстановления упругости, когда основная часть 31, 231, 431 вешалки движется в направлении колебаний (+X, -X). Упругий элемент 60, 260, 460, 560 может ограничивать колебания вибратора 50, 150, 250, 350, 450, 550 заранее определенным диапазоном.
[77] Упругий элемент 60, 260, 460 и 560 прилагает упругую силу к вибратору 50, 150, 250, 350, 450, 550, когда вибратор 50, 150, 250, 350, 450, 550 совершает колебания. Режим колебаний (амплитуда и частота) вибратора 50, 150, 250, 350, 450, 550 может определяться сложением упругой силы по меньшей мере одного упругого элемента 60, 260, 460, 560 и центробежной силы по меньшей мере одного эксцентрика 55 и 56. Режим колебаний (амплитуда и частота) вибратора 50, 150, 250, 350, 450, 550 может определяться сложением упругой силы по меньшей мере одного упругого элемента 60, 260, 460 и 560, центробежной силы по меньшей мере одного эксцентрика 55 и 56 и демпфирующей силы  , определяемой такими факторами, как структура белья и т.п.
, определяемой такими факторами, как структура белья и т.п.
[78] Один конец упругого элемента 60, 260, 460 и 560 прикреплен к вибратору 50, 150, 250, 350, 450, 550, а другой конец прикреплен к поддерживающему элементу 270, 470 и 570. Упругий элемент 60, 260, 460 и 560 может содержать пружину или главную пружину. Поддерживающий элемент 270, 470 и 570 может содержать пружину, работающую на растяжения, пружину, работающую на сжатие или торсионную пружину.
[79] Как показано на фиг.3a-4d и 8-10, упругий элемент 60, 260 по первому и второму иллюстративным вариантам выполнен с возможностью упругой деформации или восстановления упругости, когда вибратор 150, 250 совершает колебания в направлении колебаний (+X, -X). Упругий элемент 60, 260 могут ограничивать колебания вибратора 50, 150 до заданного диапазона расстояний. В первом и втором иллюстративных вариантах упругий элемент 60 и 260 может содержать пружину, работающую на растяжение или пружину, работающую на сжатие.
[80] Как показано на фиг.5a-7d, 11-14, и 17-23, упругий элемент 60, 460 и 560 по третьему и пятому вариантам, выполнен с возможностью упругой деформации или восстановления упругости, когда вибратор 350, 450 и 550 вращается вокруг центральной оси Oc. Упругий элемент 60, 460, 560 может ограничивать колебания вибратора 350, 450, 550 до заданного углового диапазона. В третьем и пятом иллюстративных вариантах упругий элемент 60, 460, 560 может содержать торсионную пружину.
[81] По меньше мере один упругий элемент 60 может иметь множество упругих элементов 60a, 60b. Множество упругих элементов 60a, 60b может содержать первый упругий элемент 60a, упруго деформирующийся, когда вибратор 50, 150, 250, 350, 450, 550 движется в одну сторону в направлении колебаний (+X, -X), и второй упругий элемент 60b, который упруго деформируется, когда он движется в другую сторону.
[82] Как показано на фиг.8-14 и 17-23, поддерживающий элемент 270, 470 и 570 прикреплен к каркасу 10. Поддерживающий элемент 270, 470, 570 может быть прикреплен к внутренней раме 11a. Поддерживающий элемент 270, 470, 570 может поддерживать упругий элемент 60, 260, 460, 560. Один конец упругого элемента 60, 260, 460, 560 прикреплен к вибратору 50, 150, 250, 350, 450, 550, а другой конец упругого элемента 60, 260, 460, 560 прикреплен к поддерживающему элементу 370, 470, 570.
[83] Как показано на фиг.8-10, поддерживающий элемент 270 по первому и второму иллюстративным вариантам не должен поддерживать вибратор 250. Вибратор 250 может поддерживаться модулем 230 вешалки. Поддерживающий элемент 270 может поддерживать со скольжением вибратор 250. Поддерживающий элемент 270 может направлять вибратор 250 в направлении колебаний (+X, -X). Поддерживающий элемент 270 может работать как направляющая, которая ограничивает движение вибратора 250 в направлении, не являющемся заранее определенным направлением (+X, -X).
[84] Как показано на фиг.11-14 и 17-23, поддерживающий элемент 470, 570 по третьему и пятому иллюстративным вариантам поддерживает вибратор 450, 550. Вибратор 450, 550 может поддерживаться внутренней рамой 11a. Вибратор 450, 550 может быть прикреплен к каркасу 10 поддерживающим элементом 470, 570. Поддерживающий элемент 470, 570 поддерживает вибратор 450, 550 подвижно. Поддерживающий элемент 470, 570 поддерживает вибратор 450, 550 с возможностью вращения. Поддерживающий элемент 470, 570 поддерживает вибратор 450, 550 так, чтобы он имел возможность движения вокруг центральной оси Oc. Поддерживающий элемент 470, 570 поддерживает колеблющееся тело 451, 551. Колеблющееся тело 451, 551 может быть соединено с каркасом 10 поддерживающим элементом 470, 570.
[85] Далее со ссылками на фиг.3a-8, 11 и 17 следует краткое описание вибратора 50, 150, 250, 350, 450, 550. Вибратор 50, 150, 250, 350, 450, 550 генерирует колебания. Вибратор 50, 150, 250, 350, 450, 550 приводит в движение (заставляет колебаться) основную часть 31, 231, 431 вешалки. Вибратор 50, 150, 250, 350, 450, 550 соединен с основной частью 31, 231, 431 вешалки и передает колебания от вибратора 50, 150, 250, 350, 450, 550 на основную часть 31, 231, 431 вешалки.
[86] Вибратор 50, 150, 250, 350, 450, 550 может находиться между внутренней рамой 11a и внешней рамой 11b. Внутренняя рама 11a на верхней стороне может иметь направленное вниз углубление для формирования конфигурационного пространства 11s, а вибратор 50, 150, 250, 350, 450, 550 может находиться в этом конфигурационном пространстве 11s.
[87] Вибратор 50, 150, 250, 350, 450, 550 может находиться над пространством 10s для обработки. Вибратор 50, 150, 250, 350, 450, 550 может находиться над основной частью 31, 231, 431 вешалки.
[88] Как показано на фиг.3a-4d, вибратор 150, 250 по первому и второму вариантам сконфигурирован так, чтобы совершать линейные возвратно-поступательные движения в заданном направлении колебаний (+X, -X). Упругий элемент 60 сконфигурирован для упругой деформации или восстановления упругости, когда вибратор 150, 250 совершает линейные возвратно-поступательные движения. Положение вибратора 150, 250 относительно основной части 231 вешалки является фиксированным. Узел 258 привода вешалки соединяет и удерживает вместе вибратор 150, 250 и основную часть 231 вешалки. Вибратор 150, 250 и основная часть 231 вешалки совершают колебания как единый узел.
[89] Вибратор 150, 250 может быть выполнен с возможностью совершать возвратно-поступательные движения только в заданном диапазоне расстояний. Например, каркас 10 или поддерживающий элемент 270 может содержать ограничитель, который может входить в контакт с вибратором 150, 250 так, чтобы ограничивать диапазон возвратно-поступательных движений вибратора 150, 250. В другом примере упругая сила упругого элемента 60 увеличивается, когда вибратор 150, 250 движется, тем самым ограничивая диапазон движения (колебаний) вибратора 150, 250.
[90] Как показано на фиг.5a-7d, согласно третьему, четвертому и пятому иллюстративным вариантам, заранее определенная центральная ось Oc заранее задана на вибраторе 350, 450, 550. Вибратор 350, 450, 550 сконфигурирован так, чтобы вращаться и совершать возвратно-поступательные движения вокруг заданной центральной оси Oc, при этом положение относительно каркаса 10 является фиксированным. Поддерживающий элемент 470, 570 поддерживает вибратор 350, 450, 550 с возможностью вращения. Основная часть 431 вешалки и вибратор 350, 450, 550 соединены по заданной соединительной оси Oh, отнесенной от центральной оси OC. Узел 458, 558 привода вешалки вращается и совершает возвратно-поступательные движения интегрально с вибратором 150, 250, а выступающая часть 458a, 558a выполняет относительное движение в направлении вперед-назад (+Y, -Y) вдоль прорези 4321bh, сформированной в основной части 431 вешалки, тем самым передавая возбуждающую силу Fo(t) на вибратор 350, 450, 550 только в направлении колебаний (+X, -X). Упругий элемент 60 выполнен с возможностью упругой деформации или восстановления упругости, когда вибратор 350, 450, 550 вращается и совершает возвратно-поступательные перемещения.
[91] Вибратор 350, 450, 550 может быть выполнен с возможностью вращения только в заданном угловом диапазоне. Например, каркас 10 или поддерживающий элемент 470, 570 могут иметь ограничитель, который может входить в контакт с вибратором 350, 450, 550 для ограничения диапазона вращений вибратора 350, 450, 550. В другом примере упругая сила упругого элемента 60 увеличивается при вращении вибратора 350, 450, 550, тем самым ограничивая диапазон вращения вибратора 350, 450, 550.
[92] Вибратор 50, 150, 250, 350, 450, 550 может содержать колеблющееся тело 251, 451, 551, выполненное с возможностью двигаться относительно каркаса 10. Колеблющееся тело 251, 451, 551 может определять внешний вид вибратора 50, 150, 250, 350, 450, 550.
[93] Колеблющееся тело 251, 451, 551 поддерживает двигатель 52. Колеблющееся тело 251, 451, 551 и узел 258, 458, 558 привода вешалки прикреплены друг к другу. Колеблющееся тело 251, 451, 551 поддерживает вал 54 груза. Колеблющееся тело 251, 451, 551 поддерживает первый эксцентрик 55 и второй эксцентрик 56. Колеблющееся тело 251, 451, 551 может содержать первый эксцентрик 55 и второй эксцентрик 56 внутри себя.
[94] Вибратор 50, 150, 250, 350, 450, 550 содержит по меньшей мере один эксцентрик 55 или 55 и 56, который вращается вокруг по меньшей мере одной заданной оси Ow или Ow1 и Ow2 так, чтобы груз находился не в центре.
[95] В первом, втором и третьем иллюстративных вариантах, как показано на фиг.3a, 3b, 5a и 5b, вибратор 150, 350 содержит эксцентрик 55, вращающийся вокруг оси Ow вращения так, чтобы груз находился не в центре.
[96] Во втором, четвертом и пятом иллюстративных вариантах, как показано на фиг.4a-4d и 6a-7d, вибратор 250, 450 и 550 содержит первый эксцентрик 55, который вращается вокруг первой оси Ow и Ow1 вращения так, чтобы груз находился не в центре, и второй эксцентрик 56, который вращается вокруг заданной второй оси Ow и Ow2 вращения, которая совпадает с первой осью Ow и Ow1 вращения или параллельна ей, так чтобы груз находился не в центре. Это может эффективно снизить колебания, генерируемые в направлении (+Y, -Y), пересекающем направление колебаний (+X, -X). Вибратор 250, 450 по второму и четвертому иллюстративным вариантам содержит первый эксцентрик 56 и второй эксцентрик 56, которые вращаются вокруг одной оси Ow вращения так, чтобы груз находился не в центре. Вибратор 55 по пятому иллюстративному варианту содержит первый эксцентрик 55, который вращается вокруг первой оси Ow1 вращения так, чтобы груз находился не в центре, и второй эксцентрик 56, который вращается вокруг второй оси Ow2 вращения, которая не совпадает с первой осью Ow1 вращения, так, чтобы груз находился не в центре.
[97] Эксцентрик 55 и 56 может поддерживаться колеблющимся телом 51, 251, 451, 551. По меньшей мере один эксцентрик 55 или 55 и 56, может поддерживаться с возможностью вращения по меньшей мере одним валом 54 или 554a и 554b груза, расположенным на колеблющегося тела 51, 251, 451, 551. Этот по меньшей мере один эксцентрик 55 или 55 и 56 по иллюстративным вариантам с первого по четвертый может поддерживаться с возможностью вращения одним валом 54 груза. Первый эксцентрик 55 и второй эксцентрик 56 по пятому иллюстративному варианту может поддерживаться с возможностью вращения первым валом 554a груза и вторым валом 554b груза соответственно.
[98] Эксцентрик 55, 56 содержит вращающуюся часть 55b, 56b, 555b, 556b, которая вращается вокруг оси Ow, Ow1 и Ow2 вращения в контакте с трансмиссионной частью 53, 553. Вращающаяся часть 55b, 56b, 555b, 556b принимает крутящие моменты от трансмиссионной части 53, 553. Вращающаяся часть может быть сформирована в форме цилиндра вокруг соответствующей оси Ow, Ow1 и Ow2 вращения.
[99] Эксцентрик 55, 56 содержит элемент 55a, 56a, 555a, 556a груза, прикрепленный к соответствующей вращающейся части 55b, 56b, 555b, 556b. Элемент 55a, 56a, 555a, 556a груза вращается интегрально с соответствующей вращающейся частью 55b, 56b, 555b, 556b. Элемент 55a, 56a, 555a, 556a груза изготовлен материала, удельный вес которого больше, чем удельный вес соответствующей вращающейся части 55b, 56b, 555b, 556b. Элемент 55a, 56a, 555a, 556a груза расположен с одной стороны от соответствующей оси вращения и смещает вес соответствующего эксцентрика 55, 56 от центра. Элемент 55a, 56a, 555a, 556a груза может быть сформирован в форме колонны с полукруглым основанием.
[100] Вибратор 50, 150, 250, 350, 450, 550 может содержать двигатель 52, 552, генерирующий крутящий момент для по меньшей мере одного эксцентрика 55 или 55 и 56. Двигатель 52, 552 расположен на колеблющегося тела 251, 451, 551. Двигатель 52, 552 содержит вращающийся вал 52a, 552a. Вал 52a, 552a двигателя передает крутящий момент на трансмиссионную часть 53, 553.
[101] Вибратор 50, 150, 250, 350, 450, 550 может содержать трансмиссионную часть 53, 553, которая передает крутящий момент от двигателя 52 на по меньшей мере один эксцентрик 55 или 55 и 56. Трансмиссионная часть 53, 553 расположена на колеблющегося тела 251, 451, 551. Трансмиссионная часть 53, 553 может содержать шестерню, ремень и/или шкивы.
[102] Вибратор 50, 150, 250, 350, 450, 550 содержит узел 258, 458, 558 привода вешалки, который соединяет колеблющееся тело 251, 451, 551 и основная часть 31, 231, 431 вешалки. Узел 258, 458, 558 привода вешалки выполнен с возможностью соединять вибратор 50, 150, 250, 350, 450, 550 и основная часть 251, 451, 551 вешалки. Узел 258, 458, 448 привода вешалки передает колебания вибратора 50, 150, 250, 350, 450, 550 на основную часть 31, 231, 431 вешалки. Узел 258, 458, 558 привода вешалки может предавать колебания колеблющегося тела 251, 451, 551 на основную часть 31, 231, 431 вешалки вдоль соединительной оси Oh.
[103] Вибратор 50, 150, 250, 350, 450, 550 содержит участок 259, 459, 559 запирания упругого элемента, на котором заперт один конец упругого элемента 60, 260, 460, 560. Участок 259, 459, 559 запирания упругого элемента может быть расположен на колеблющегося тела 251, 451, 551. Участок 259, 459, 559 запирания упругого элемента может прилагать давление к упругому элементу 60, 260, 460, 560 или принимать упругую силу от упругого элемента 60, 260, 460, 560, когда вибратор 50, 150, 250, 350, 450, 550 движется.
[104] Далее со ссылками на фиг.2-7d следует описание терминов и ссылочных позиций, относящихся к механизму работы вибратора 50, 150, 250, 350, 450, 550.
[105] Направление колебаний (+X, -X) относится к заранее заданному направлению, в котором основная часть 31, 231, 431 вешалки совершает возвратно-поступательные движения. В этом иллюстративном варианте направление колебаний (+X, -X) является направлением влево-вправо.
[106] "Центральная ось Oc, ось Ow, Ow1, Ow2 вращения и соединительная ось Oh", упоминаемые в описании, являются воображаемыми осями, используемыми для описания настоящего изобретения, и не обозначают какие-либо реальные компоненты устройства.
[107] Ось Ow, Ow1, Ow2 вращения является воображаемой прямой, проходящей сквозь центр вращения соответствующего эксцентрика 55, 56. Ось Ow, Ow1, Ow2 вращения сохраняет фиксированное положение относительно колеблющегося тела 251, 451, 551. То есть, даже когда колеблющееся тело 251, 451, 551 движется, ось Ow, Ow1, Ow2 вращения движется интегрально с колеблющимся телом 251, 451, 551 и сохраняет положение относительно колеблющегося тела 251, 451, 551. Ось Ow, Ow1, Ow2 вращения может проходить вертикально.
[108] В этом иллюстративном варианте функцию оси Ow, Ow1, Ow2 вращения может выполнять вал 54, 554a, 554b груза, расположенный на оси Ow, Ow1, Ow2 вращения. В другом иллюстративном варианте функцию оси Ow, Ow1, Ow2 вращения может выполнять выступ, проходящий вдоль оси Ow, Ow1, Ow2 вращения и сформированный либо на эксцентрике 55, 56 или на колеблющегося тела 251, 451, 551, и канавка, в которую этот выступ может быть вставлен с возможностью вращения, сформированную в любом из этих элементов.
[109] Ось Ow, Ow1, Ow2 вращения может проходить перпендикулярно направлению колебаний (+X, -X). Первая ось Ow1 вращения и вторая ось Ow2 вращения могут проходить перпендикулярно направлению колебаний (+X, -X).
[110] Соединительная ось Oh является воображаемой прямой линией, проходящей через точку, в которой сила Fo(t) возбуждения прилагается к колеблющегося тела 251, 451, 551 вешалки колебаниями, генерируемыми вибратором 50, 150, 250, 350, 450, 550. Соединительная ось Oh может быть определена как прямая линия, проходящая вертикально через точку приложения возбуждающей силы Fo(t). Соединительная ось Oh удерживает фиксированное положение относительно колеблющегося тела 251, 451, 551. То есть, даже когда колеблющееся тело 251, 451, 551 движется, соединительная ось Oh движется интегрально с колеблющимся телом 251, 451, 551 и сохраняет положение относительно колеблющегося тела 251, 451, 551.
[111] В иллюстративных вариантах с третьего по пятый, как показано на фиг.5a-7d, центральная ось Oc является воображаемой линией, проходящей через центр вращения вибратора 350, 450, 550. Центральная ось Oc может проходить вертикально.
[112] Для выполнения функций центральной оси, на поддерживающем элементе 70 может быть сформирована центральная осевая часть 475, 575, выступающая вдоль центральной оси Oc, а в колеблющегося тела 451, 551 в этом иллюстративном варианте может быть сформирована центральная канавка 551h или отверстие, в которое с возможностью вращения входит центральная осевая часть 475, 575. В другом иллюстративном варианте для выполнения функций центральной оси на колеблющегося тела 451, 551 может быть выполнен выступ, проходящий вдоль центральной оси Oc, а в поддерживающем элементе 470, 570 может быть выполнена канавка, в которую с возможностью вращения вставлен этот выступ.
[113] В иллюстративных вариантах с третьего по пятый, как показано на фиг.5a-7d, ось Ow, Ow1, Ow2 вращения и центральная ось Oc разнесены и проходят параллельно друг другу. Это позволяет вибратору 350, 450, 550 эффективно вращаться и колебаться под действием центробежной силы F1, F2, возникающей в результате вращения эксцентрика 55, 56.
[114] В иллюстративных вариантах с третьего по пятый, как показано на фиг.5a-7d, соединительная ось Oh и центральная ось Oc разнесены и проходят параллельно друг другу. Вибратор 350, 450, 550 и основная часть 31, 431 вешалки соединены друг с другом так, что вращательное и возвратно-поступательное движение (дуговое движение) вибратора 350, 450, 550 преобразуется в линейное возвратно-поступательное движение основной части 31, 431 вешалки.
[115] В иллюстративных вариантах с третьего по пятый, как показано на фиг.5a-7d, периферийное направление Dl означает направление периметра вокруг центральной оси Oc и включает направление Dl1 по часовой стрелке и направление Dl2 против часовой стрелки. Направление Dl1 по часовой стрелке и направление Dl2 против часовой стрелки определены, если смотреть с одного из направлений (+Z, -Z), в которых проходит центральная ось Oc. Кроме того, диаметральное направление Dr означает направление, проходящее поперек центральной оси Oc и включает центробежное направление Dr1 и медиальное направление Dr2. Центробежное направление Dr1 означает направление от центральной оси Oc, а медиальное направление Dr2 означает направление к центральной оси Oc.
[116] В иллюстративных вариантах с третьего по пятый, когда центробежная сила F1 относительно оси Ow, Ow1 вращения, возникающая при вращении эксцентрика 55, направлена в периферийном направлении Dl и центробежная сила F1 приводи к вращению вибратора 350, 450, 550 на центральной оси Oc.
[117] В иллюстративных вариантах с третьего по пятый, когда центробежная сила F1 относительно оси Ow, Ow1 вращения, возникающая при вращении эксцентрика 55 направлена в диаметральном направлении Dr, центробежная сила F1 не вызывает вращения вибратора 350, 450, 550 на центральной оси Oc.
[118] В четвертом и пятом иллюстративных вариантов, когда центробежная сила F1 относительно оси Ow и Ow1, возникающая при вращении первого эксцентрика 55, направлена в периферийном направлении Dl, центробежная сила F1 приводит к вращению вибратора 450, 550 на центральной оси Oc и, когда центробежная сила F2 относительно оси Ow и Ow2, возникающая при вращении второго эксцентрика 56, направлена в периферийном направлении Dl, центробежная сила F2 приводит к вращению вибратора 450, 550 на центральной оси Oc.
[119] В четвертом и пятом иллюстративных вариантах, когда центробежная сила F1 относительно оси Ow, Ow1 вращения, возникающая в результате вращения первого эксцентрика 55, направлена в диаметральном направлении Dr, эта центробежная сила F1 не приводит к вращению вибратора 450, 550, на центральной оси Oc, а когда центробежная сила F2 относительно оси Ow, Ow2 вращения, возникающая при вращении второго эксцентрика 56, направлена в диаметральном направлении Dr, центробежная сила F2 не приводит к вращению вибратора 450, 550 на центральной оси.
[120] На фиг.3a-7d показан центр m, m1, m2 масс эксцентрика 55, 56, радиус r, r1, r2 вращения центра m, m1, m2 масс относительно соответствующей оси Ow, Ow1, Ow2 вращения, и угловая скорость w эксцентрика вокруг соответствующей оси Ow, Ow1, Ow2 вращения.
[121] Также на фиг.5a-7d показано расстояние A, A1, A2 между центральной осью Oc и осью Ow, Ow1, Ow2 вращения, расстояние B между центральной осью Oc и соединительной осью Oy, и угол θ вращения вибратора 350, 450, 550 вокруг центральной оси Oc.
[122] На фиг.3a-7d показано направление центробежной силы F1 эксцентрика 55 относительно оси Ow, Ow1 вращения, а на фиг.4a-4d и 6a-7d также показано направление центробежной силы F2 эксцентрика 56 относительно оси Ow, Ow2 вращения. Центробежные силы F1, F2 приложены к вибратору 50, 150, 250, 350, 450, 550.
[123] Возбуждающая сила Fo(t) - это сила, приложенная к основной части 31, 231, 431 вешалки центробежными силами F1, F2, и означает внешнюю силу в направлении колебаний (+X, -X) относительно времени t. В этом иллюстративном примере справедлива формула  .
.
[124] В первом и третьем иллюстративных вариантах (см. фиг.3a, 3b, 5a и 5b), где имеется один эксцентрик 55, величина центробежной силы F1 равна  . Центробежная сила F1 действует на вибратор 150, 350, и точка воздействия центробежной силы F1 находится на оси Ow вращения.
. Центробежная сила F1 действует на вибратор 150, 350, и точка воздействия центробежной силы F1 находится на оси Ow вращения.
[125] Во втором, четвертом и пятом иллюстративных вариантах (см. фиг.4a-4d, 6a-7d) где имеются два эксцентрика 55 и 56, величина центробежной силы F1 равна  , а величина центробежной силы F2 равна
, а величина центробежной силы F2 равна  . Центробежные силы F1 и F2 приложены к вибратору 350, 450, и точки воздействия центробежных сил F1 и F2 расположены на оси Ow и Ow1 вращения и на оси Ow и Ow2 вращения, соответственно.
. Центробежные силы F1 и F2 приложены к вибратору 350, 450, и точки воздействия центробежных сил F1 и F2 расположены на оси Ow и Ow1 вращения и на оси Ow и Ow2 вращения, соответственно.
[126] Во втором, четвертом и пятом иллюстративных вариантах центробежная сила F1 и центробежная сила F2 заданы так, чтобы усиливать друг друга, когда они генерируют возбуждающую силу Fo(t) в направлении колебаний (+X, -X).
[127] Во втором, четвертом и пятом иллюстративных вариантах центробежная сила F1 и центробежная сила F2 заданы так, чтобы уравновешивать друг друга, когда они не генерируют возбуждающую силу Fo(t) в направлении колебаний (+X, -X). В этом случае центробежная сила F1 и центробежная сила F2 действуют в противоположных направлениях и прилагаются по одной и той же линии воздействия и, следовательно, сумма центробежных сил F1 и F2 равна разнице между величиной центробежной силы F1 и величиной центробежной силы F2. Поэтому, по меньшей мере одна из центробежных сил F1 и F2 уравновешена другой.
[128] Здесь желательно, чтобы центробежная сила F1 и центробежная сила F2 были заданы так, чтобы "полностью уравновесить" друг друга, когда они не генерируют возбуждающую силу Fo(t) в заданном направлении колебаний (+X, -X). Для этого желательно, чтобы скалярная величина m1⋅r1 и скалярная величина m2⋅r2 задавались равными. В одном примере они могут задаваться так, чтобы удовлетворять двум условиям: r1=r2 и m1=m2. В другом примере даже если радиус r1 вращения и радиус r2 вращения не равны, и масса m1 и масса m2 не равны, m1⋅r1 и m2⋅r2 можно задать равными, чтобы центробежная сила F1 и центробежная сила F2 в пересекающем направлении (+Y, -Y) полностью уравновешивали друг друга.
[129] Во втором, четвертом и пятом иллюстративных вариантах первый эксцентрик 55 и второй эксцентрик 56 могут быть выполнены с возможностью вращения с одинаковой угловой скоростью w. Это позволяет периодически усиливать и уравновешивать центробежные силы F1 и F2, возникающие при вращении первого эксцентрика 55 и второго эксцентрика 56.
[130] Здесь угловая скорость означает скалярную величину, которая имеет только величину, но не направление вращения, что отличает ее от угловой частоты вращения, которая является вектором, имеющим и направление, и величину. То есть, если угловая скорость w первого эксцентрика 55 и угловая скорость w второго эксцентрика 56 равны, это не значит, что они вращаются в одном направлении. Во втором и четвертом иллюстративных вариантах, даже если угловая скорость w первого эксцентрика 55 и угловая скорость w второго эксцентрика 56 равны, первый эксцентрик 55 и второй эксцентрик 56 вращаются в противоположных направлениях вращения. В пятом иллюстративном варианте угловая скорость w первого эксцентрика 55 и угловая скорость w второго эксцентрика 56 равны, и они вращаются в одном направлении вращения.
[131] Во втором, четвертом и пятом иллюстративных вариантах i) расстояние A и A1 между первой осью Ow, Ow1 вращения первого эксцентрика 55 и центральной осью Oc и ii) расстояние A и A2 между второй осью Ow и Ow2 второго эксцентрика может быть равным.
[132] Во втором, четвертом и пятом иллюстративных вариантах первая ось Ow, Ow1 вращения и вторая ось Ow, Ow2 вращения могут быть отнесены от центральной оси Oc в одном направлении или в разных направлениях. Центральная ось Oc, первая ось Ow1 вращения и вторая ось Ow2 вращения расположены так, чтобы пересекать воображаемую прямую линию под прямым углом.
[133] Во втором и четвертом иллюстративных вариантах первая ось Ow вращения и вторая ось Ow вращения отнесены от центральной оси Oc в одном направлении.
[134] В пятом иллюстративном варианте первая ось Ow1 вращения и вторая ось Ow2 вращения отнесены от центральной оси Oc в разных направлениях. Это позволяет отнести вибратор 550 от центра в одну сторону от центральной оси Oc, тем самым снижая риск возникновения напряжений в структуре.
[135]
[136] Далее, со ссылками на фиг.3a-7d следует описание методики расчета возбуждающей силы Fo(t) для каждого иллюстративного варианта. Здесь возбуждающая сила Fo(t) рассчитывается исходя из того, что эксцентрик 55 и 56 вращается с конкретной угловой скоростью.
[137] В первом и втором иллюстративных вариантах, как показано на фиг.3a-4d, когда центробежные силы F1 и F2 относительно соответствующей оси Ow вращения, возникшие в результате вращения эксцентрика 55 и 56, направлены в направлении колебаний (+X, -X), эти центробежные силы F1 и F2 вызывают линейное перемещение вибратора 150, 250 в направлении колебаний (+X, -X). С другой стороны, когда центробежные силы F1 и F2 относительно соответствующей оси Ow вращения, возникшие в результате вращения эксцентрика 55 и 56, направлены в направлении (+Y, -Y), пересекающем направление колебаний (+X, -X), эти центробежные силы F1 и F2 не приводят к линейному перемещению вибратора 150, 250 в направлении колебаний (+X, -X).
[138] В иллюстративных вариантах с третьего по пятый, как показано на фиг.5a-7d, когда центробежные силы F1, F2 относительно соответствующей оси Ow, Ow1, Ow2 вращения, возникшие в результате вращения эксцентрика 55, 56, направлены в периферийном направлении Dl, эти центробежные силы F1 и F2 вызывают вращение вибратора 350, 450, 550 на центральной оси Oc. С другой стороны, когда центробежные силы F1 и F2 относительно соответствующей оси Ow, Ow1, Ow2 вращения, возникшие в результате вращения эксцентрика 55, 56, направлены в диаметральном направлении Dr, эти центробежные силы F1 и F2 не вызывают вращение вибратора 350, 450, 550 на центральной оси Oc.
[139] Далее, первый иллюстративный вариант со ссылками на фиг.3a и 3b показывает угловой момент поворота на 180 градусов эксцентрика 55, вращающегося с постоянной угловой скоростью w. Поскольку вибратор 150 совершает колебания интегрально с основной частью 31 вешалки, возбуждающая сила Fo(t) может считаться силой в направлении колебаний (+X, -X), вызванной центробежной силой F1.
[140] Как показано на фиг.3a, возбуждающая сила Fo(t), действующая на вибратор 150 в направлении +X и вызванная центробежной силой F1, имеет максимальную величину Fo. Здесь возбуждающая сила Fo является силой F1 в направлении +X.
[141] Как показано на фиг.3a, возбуждающая сила Fo(t), воздействующая на вибратор 150 в направлении -X, вызванная центробежной силой F1, имеет максимальную величину Fo. Здесь возбуждающая сила Fo является силой F1 в направлении -X.
[142] Соответственно, возбуждающая сила Fo(t) по первому иллюстративному варианту определяется математической формулой 1:
[143] Математическая формула 1
[Формула 1]

[144] Далее, на фиг.4a и 4b, относящихся ко второму иллюстративному варианту, показан угловой момент для вращения на 90 градусов первого эксцентрика 55 и второго эксцентрика 56, вращающихся с одинаковой угловой скоростью w. Поскольку вибратор 250 совершает колебания интегрально с основной частью 31 вешалки, возбуждающую силу Fo(t) можно рассчитать как сумму центробежной силы F1 и центробежной силы F2 в направлении колебаний (+X, -X).
[145] Как показано на фиг.4a и 4c, центробежная сила F1 и центробежная сила F2 заданы так, чтобы усиливать друг друга при воздействии на вибратор 250 в направлении колебаний (+X, -X). В этом случае возбуждающая сила Fo в направлении колебаний (+X, -X), вызванная центробежной силой F1 и центробежной силой F2 равна F1+F2.
[146] Как показано на фиг.4b и 4d, центробежная сила F1 и центробежная сила F2 заданы так, чтобы быть направленными в противоположные стороны во время воздействия на вибратор 250 в пересекающем направлении (+Y, -Y). В этом случае возбуждающая сила Fo(t) в направлении колебаний (+X, -X), вызванная центробежной силой F1 и центробежной силой F2, равна нулю. Также возбуждающая сила в пересекающем направлении (+Y, -Y), вызванная центробежной силой F1 и центробежной силой F2 равна |F1-F2|. Предпочтительно, возбуждающая сила в пересекающем направлении (+Y, -Y), вызванная центробежной силой F1 и центробежной силой F2, равна нулю.
[147] Как показано на фиг.4a, центробежная сила F1 и центробежная сила F2 усиливают друг друга и воздействуют на вибратор 250 в направлении +X. Возбуждающая сила, передаваемая на основную часть 31 вешалки вдоль соединительной оси Oh, имеет максимальную величину Fo в направлении +X. Здесь возбуждающая сила Fo в направлении +X равна F1+F2.
[148] Как показано на фиг.4b, центробежная сила F1 и центробежная сила F2 не воздействуют на вибратор 250 в направлении колебаний (+X, -X). Кроме того, центробежная сила F1 и центробежная сила F2, действующие в противоположных направлениях, уравновешивают друг друга. Возбуждающа сила, передаваемая на основную часть 31 вешалки вдоль соединительной оси Oh, равна нулю.
[149] Как показано на фиг.4c, центробежная сила F1 и центробежная сила F2, усиливают друг друга и воздействуют на вибратор 350 в направлении -X. Здесь возбуждающая сила Fo в направлении -X равна F1+F2.
[150] Как показано на фиг.4d, центробежная сила F1 и центробежная сила F2 не воздействует на вибратор 250 в направлении колебаний (+X, -X). Также, центробежная сила F1 и центробежная сила F2, действующие в противоположных направлениях, уравновешивают друг друга. Возбуждающая сила Fo в направлении колебаний (+X, -X), передаваемая на основную часть 31 вешалки вдоль соединительной оси Oh, равна нулю.
[151] Соответственно, возбуждающая сила Fo(t) во втором иллюстративном варианте определяется по математической формуле 2:
[152] Математическая формула 2
[Формула 2]

[153] где: если M1r1=m2r2, то формула Fo(t)=2⋅m1⋅r1⋅w2⋅cos wt справедлива.
[154]  Далее, как показано на фиг.5a и 5b, относящихся к третьему иллюстративному варианту, угловой момент при 180-градусном повороте эксцентрика 66, вращающегося с постоянной скоростью w. Поскольку вибратор 350 вращается вокруг центральной оси Oc, возбуждающую силу Fo(t) можно рассчитать, преобразуя центробежную силу F1 во внешнюю силу с точкой воздействия на соединительной оси Oh, принимая во внимание длины A и B плеча пары сил.
Далее, как показано на фиг.5a и 5b, относящихся к третьему иллюстративному варианту, угловой момент при 180-градусном повороте эксцентрика 66, вращающегося с постоянной скоростью w. Поскольку вибратор 350 вращается вокруг центральной оси Oc, возбуждающую силу Fo(t) можно рассчитать, преобразуя центробежную силу F1 во внешнюю силу с точкой воздействия на соединительной оси Oh, принимая во внимание длины A и B плеча пары сил.
[155] Как показано на фиг.5a, эксцентрик 55 генерирует центробежную силу F1 относительно оси Ow вращения в направлении Dl1 по часовой стрелке. Таким образом, вибратор 350 имеет вращающий момент, генерируемый в направлении Dl1 по часовой стрелке, а возбуждающая сила, передаваемая на основную часть 31 вешалки вдоль соединительной оси Oh имеет максимальную величину Fo в направлении -X. Здесь возбуждающая сила Fo в направлении -X равна  .
.
[156] Как показано на фиг.5b, эксцентрик 55 генерирует центробежную силу F1 относительно оси Ow вращения в направлении Dl2 против часовой стрелки. Поэтому вибратор 350 совершает вращательное движение в направлении D2 против часовой стрелки, и возбуждающая сила, передаваемая на основную часть 31 вешалки вдоль соединительной оси Oh, имеет максимальную величину Fo в направлении +X. Здесь возбуждающая сила Fo в направлении +X равна .
[157] Соответственно, возбуждающая сила Fo(t) для третьего варианта определяется следующей математической формулой 3:
[158] Математическая формула 3
[формула 3]

[159] Далее, на фиг.6a-6d, относящихся к четвертому варианту, показан угловой момент при 90-градусном вращении первого эксцентрика 55 и второго эксцентрика 56, которые вращаются с одинаковой постоянной угловой скоростью w. Поскольку вибратор 450 вращается вокруг центральной оси Oc, возбуждающую силу Fo можно рассчитать, преобразуя сумму центробежной силы F1 и центробежной силы F2 в возбуждающую силу с точкой воздействия на соединительной оси Oh, принимая во внимание длины A и B плеча пары сил.
[160] Как показано на фиг.6a и 6c, центробежная сила F1 и центробежная сила F2 заданы так, чтобы усиливать друг друга, когда они генерируют крутящий момент вокруг центральной оси Oc вибратора 450. В этом случае момент ( создаваемый центробежной силой F1 и центробежной силой F2 равен моменту (B⋅Fo), создаваемому возбуждающей силой Fo. Таким образом, Fo становится равной
создаваемый центробежной силой F1 и центробежной силой F2 равен моменту (B⋅Fo), создаваемому возбуждающей силой Fo. Таким образом, Fo становится равной  .
.
[161] Как показано на фиг.6b и 6d, центробежная сила F1 и центробежная сила F2 настроены так, чтобы они были направлены в противоположных направлениях, когда они не генерируют крутящий момент вокруг центральной оси Oc вибратора 450. В этом случае возбуждающая сила Fo(t) в направлении колебаний (+X, -X), вызванная центробежной силой F1 и центробежной силой F2, равна нулю. Также, возбуждающая сила в пересекающем направлении (+Y, -Y), вызванная центробежной силой F1 и центробежной силой F2 равна |F1-F2|. Предпочтительно, возбуждающая сила в пересекающем направлении (+Y, -Y), вызванная центробежной силой F1 и центробежной силой F2 заранее задана на ноль.
[162] Как показано на фиг.6a, когда первый эксцентрик 55 генерирует центробежную силу F1 относительно первой оси Ow вращения в направлении Dl1 по часовой стрелке, второй эксцентрик 56 генерирует центробежную силу F2 относительно второй оси Ow вращения в направлении Dl1 по часовой стрелке. Поэтому вибратор 450 имеет крутящий момент, генерируемый в направлении Dl1 по часовой стрелке, и возбуждающая сила, передаваемая на основную часть 31 вешалки вдоль соединительной оси Oh имеет максимальную величину Fo в направлении -X. Здесь возбуждающая сила Fo в направлении -X равна  .
.
[163] Как показано на фиг.6b, когда первый эксцентрик 55 генерирует центробежную силу F1 относительно первой оси Ow вращения в центробежном направлении Dr1, второй эксцентрик 56 генерирует центробежную силу F2 относительно второй оси Ow вращения в серединном направлении Dr2. Поэтому центробежная сила F1 и центробежная сила F2 не генерируют крутящий момент на вибраторе 450. Возбуждающая сила, передаваемая на основную часть 31 вешалки вдоль соединительной оси Oh равна нулю.
[164] Как показано на фиг.6c, когда первый эксцентрик 55 генерирует центробежную силу F1 относительно первой оси Ow вращения в направлении Dl2 против часовой стрелки, второй эксцентрик 56 генерирует центробежную силу F2 относительно второй оси Ow вращения в направлении Dl2 против часовой стрелки. Поэтому вибратор 450 имеет крутящий момент, генерируемый в направлении Dl2 против часовой стрелки, а возбуждающая сила, передаваемая на основную часть 31 вешалки вдоль соединительной оси Oh имеет максимальную величину Fo в направлении +X. Здесь возбуждающая сила Fo в направлении +X равна  .
.
[165] Как показано на фиг.6d, когда первый эксцентрик 55 генерирует центробежную силу F1 относительно первой оси Ow вращения в серединном направлении Dr2, второй эксцентрик 56 генерирует центробежную силу F2 относительно второй оси Ow вращения в центробежном направлении Dr1. Поэтому, центробежная сила F1 и центробежная сила F2 не генерируют крутящий момент для вибратора 450. Возбуждающая сила, передаваемая на основную часть 31 вешалки вдоль соединительной оси Oh равна нулю.
[166] Соответственно, возбуждающая сила Fo(t) согласно четвертому иллюстративному варианту, определяется следующей математической формулой 4:
[167] Математическая формула 4
[Формула 4]

[168] где, если m1⋅r1=m2⋅r2, справедлива формула

[169] Далее, пятый иллюстративный вариант, описываемый со ссылками на фиг.7a-7d, показывает угловой момент 90-градусного вращения первого эксцентрика 55 и второго эксцентрика 56, вращающихся с одинаковой постоянной угловой скоростью w. Поскольку вибратор 550 вращается вокруг центральной оси Oc, возбуждающую сила Fo можно рассчитать, преобразуя сумму центробежной силы F1 и центробежной силы F2 во внешнюю силу с точкой воздействия на соединительной оси Oh, принимая в расчет длины плеча A1,A2 пары сил.
[170] Как показано на фиг.7a b 7c, центробежная сила F1 и центробежная сила F2 заданы так, чтобы усиливать друг друга, когда они генерируют крутящий момент вокруг центральной оси Oc вибратора 550. В этом случае момент ( ) вызванный центробежной силой F1 и центробежной силой F2 равен моменту (
) вызванный центробежной силой F1 и центробежной силой F2 равен моменту ( ), вызванному возбуждающей силой Fo. Поэтому Fo становится равной
), вызванному возбуждающей силой Fo. Поэтому Fo становится равной  .
.
[171] Как показано на фиг.7b и 7d, центробежная сила F1 и центробежная сила F2 заданы так, чтобы быть направленными в противоположных направлениях, когда они не генерируют момент вокруг центральной оси Oc вибратора 550. В этом случае возбуждающая сила Fo(t) в направлении колебаний (+X, -X), вызванная центробежной силой F1 и центробежной силой F2, равна нулю. Кроме того, возбуждающая сила в пересекающем направлении (+Y, -Y), вызванная центробежной силой F1 и центробежной силой F2 равна |F1-F2|. Предпочтительно, возбуждающа сила в пересекающем направлении (+Y, -Y), вызванная центробежной силой F1 и центробежной силой F2, равна нулю.
[172] Как показано на фиг.7a, когда первый эксцентрик 55 генерирует центробежную силу F1 относительно первой оси Ow1 вращения в направлении Dl1 по часовой стрелке, второй эксцентрик 56 генерирует центробежную силу F2 относительно второй оси Ow2 вращения в направлении Dl1 по часовой стрелке. Поэтому, вибратор 550 имеет крутящий момент, генерируемый в направлении Dl1 по часовой стрелке, и возбуждающая сила, передаваемая на основную часть 31 вешалки вдоль соединительной оси Oh имеет максимальную величину Fo в направлении -X. Здесь возбуждающая сила Fo в направлении -X равна .
[173] Как показано на фиг.7b, когда первый эксцентрик 55 генерирует центробежную силу F1 относительно первой оси Ow1 вращения в серединном направлении Dr2, второй эксцентрик 56 генерирует центробежную силу F2 относительно второй оси Ow2 вращения в серединном направлении Dr2. Поэтому центробежная сила F1 и центробежная сила F2 не генерируют крутящий момент на вибраторе 550. Возбуждающая сила, передаваемая на основную часть 31 вешалки вдоль соединительной оси Oh равна нулю.
[174] Как показано на фиг.7c, когда первый эксцентрик 55 генерирует центробежную силу F1 относительно первой оси Ow1 вращения в направлении Dl1 против часовой стрелки, второй эксцентрик 56 генерирует центробежную силу F2 относительно второй оси Ow2 вращения в направлении Dl1 против часовой стрелки. Поэтому, вибратор 550 имеет крутящий момент, генерируемый в направлении Dl2 против часовой стрелки, и возбуждающая сила, передаваемая на основную часть 31 вешалки вдоль соединительной оси Oh имеет максимальную величину Fo в направлении +X. Здесь возбуждающая сила Fo в направлении +X равна .
[175] Как показано на фиг.7d, когда первый эксцентрик 55 генерирует центробежную силу F1 относительно первой оси Ow вращения в центробежном направлении Dr1, второй эксцентрик 56 генерирует центробежную силу F2 относительно второй оси Ow2 вращения в центробежном направлении Dr1. Поэтому центробежная сила F1 и центробежная сила F2 не генерируют крутящий момент на вибраторе 550. Возбуждающая сила, передаваемая на основную часть 31 вешалки вдоль соединительной оси Oh равна нулю.
[176] Соответственно, возбуждающая сила Go(t) в пятом варианте определяется следующей математической формулой 5:
[177] Математическая формула 5
[Формула 5]

[178] где, если m1⋅r1=m2⋅r2, справедливо уравнение

[179] Далее, со ссылками на фиг.2-7d, следует описание уравнения принудительных колебаний, вызванных возбуждающей силой Fo(t), и его решения. Уравнение принудительных колебаний, вызванных возбуждающей силой Fo(t), можно выразить как обыкновенное дифференциальное уравнение второго порядка, используя математическую формулу 6. Здесь получаемая величина является положением x(t) соответствующей оси Oh в направлении колебаний (+X, -X) относительно времени t.
[180] Математическая формула 6
[Формула 6]

[181] где p1, p2, p3 постоянные больше нуля.
[182] Промежуточное решение x1(t) для математической формулы 6 можно выразить следующей математической формулой 7:
[183] Математическая формула 7
[Формула 7]

[184] где  - общее решение, а
- общее решение, а
[185]  - частное решение
- частное решение
[186] Общее решение математической формулы 7 является решением, определяемым только постоянными p1, p2, p3, и, как хорошо известно, общее решение стремится к нулю, когда время t расходится к ∞. Также, частное решение математической формулы 7 является решением, определяемым константами p1, p2, p3 и возбуждающей силой Fo(t) в математической формуле 6.
[187] Промежуточное решение x1(t) является решением, которое даже включает сам переходный процесс, возникающий на начальном периоде времени, начинающемся в исходное время (t-0), в течение которого вибратор 50, 150, 250, 350, 450, 550 начинает работать, и которое не учитывается в настоящем изобретении.
[188] В настоящем изобретении учитывается решение для установившегося состояния x2(t), для которого общее решение аппроксимируется до нуля, когда работа уже началась. Решение x2(t) для установившегося состояния по математической формуле 6 определяется математической формулой 8.
[189] Математическая формула 8
[формула 8]

[190] Далее, решение x(t) для математической формулы 6 обозначает решение x2(t) для установившегося состояния для математической формулы 8.
[191] На решение x(t) для математической формулы 6 влияет возбуждающая сила Fo(t), а возбуждающая сила Fo(t) в настоящем изобретении принимает форму  . Поэтому решение x(t) для математической формулы 6 определяется по следующей математической формуле 9, в соответствии с хорошо известным способом решения обыкновенных дифференциальных уравнений второго порядка.
. Поэтому решение x(t) для математической формулы 6 определяется по следующей математической формуле 9, в соответствии с хорошо известным способом решения обыкновенных дифференциальных уравнений второго порядка.
[192] Математическая формула 9
[формула 9]

[193] где
[194]  ,
,
[195]  ,
,
[196]  ,
,
[197]  ,
,
[198] 
[199] где X(w) представляет амплитуду X(w) в направлении колебаний (+X, -X) основной части 31 вешалки в установившемся состоянии, вызванным определенное угловой скоростью w. Кроме того,  представляет угол сдвига фаз между возбуждающей силой Fo(t) и решением x(t).
представляет угол сдвига фаз между возбуждающей силой Fo(t) и решением x(t).
[200] Также, wn может представлять собственную угловую скорость, а  может представлять собственную частоту.
может представлять собственную частоту.
[201] Полагая, что коэффициент p2 равен нулю, когда угловая скорость w приближается к собственной угловой скорости wn, возникает резонанс.
[202] В реальности коэффициент h2 может иметь величину больше нуля. Если нижеследующая математическая формула 10 справедлива в соответствии с решением уже известного уравнения колебаний, амплитуда X(w) имеет максимальную (пиковую) величину X(wmax), когда угловая скорость w эксцентрика 55 и 56 имеет некоторую величину wmax, близкую к собственной угловой скорости wn. Когда p1⋅p3 становится больше, чем  , пиковая форма амплитуды X(wmax) становится более выраженной, и пиковая величина X(wmax) становится больше, как на графике, приведенном на фиг.2. Согласно хорошо известному методу решения, пиковая величина X(Wmax) является конечной, если p2>0. Кроме того, величина wmax дана как единственная величина, согласно хорошо известному методу решения, если P2>0 увеличивается, когда p2 уменьшается и приближается к собственной угловой скорости wn когда p2 приближается к 0.
, пиковая форма амплитуды X(wmax) становится более выраженной, и пиковая величина X(wmax) становится больше, как на графике, приведенном на фиг.2. Согласно хорошо известному методу решения, пиковая величина X(Wmax) является конечной, если p2>0. Кроме того, величина wmax дана как единственная величина, согласно хорошо известному методу решения, если P2>0 увеличивается, когда p2 уменьшается и приближается к собственной угловой скорости wn когда p2 приближается к 0.
[203] Математическая формула 10
[204] В то же время, если математическая формула 10 не соответствует условию ( ), пиковая величина не присутствует и амплитуда X(w) монотонно уменьшается, по мере увеличения w.
), пиковая величина не присутствует и амплитуда X(w) монотонно уменьшается, по мере увеличения w.
[205] В настоящем изобретении предпочтительно, чтобы математическая формула 10 была справедлива. Это облегчает управление частотой  и амплитудой X(w) основной части 31 вешалки различными способами.
и амплитудой X(w) основной части 31 вешалки различными способами.
[206] Далее следует описание уравнений принудительных колебаний по иллюстративным вариантам и различных их свойств, со ссылками на фиг.3a-7d.
[207] В уравнениях принудительных колебаний по иллюстративным вариантам нестоящего изобретения используется свойство, заключающееся в том, что возбуждающая сила Fo(t) равна сумме силы инерции, силы демпфирования и упругой силы. Здесь сила демпфирования может генерироваться структурными факторами модуля 30 вешалки и вибратора 50 и/или белья, висящей на основной части 31 вешалки.
[208] Хотя на фиг.3a-7d для удобства коэффициент c демпфирования показан концептуально, в реальности коэффициент c демпфирования рассматривается как применяемый к движению положения x в направлении колебаний (+X, -X) вдоль соединительной оси Oh.
[209] Хотя на фиг.3a-7d для удобства модуль k упругости показан концептуально, в реальности модуль k упругости может быть модулем упругости для сжатия или растяжения, применяемым к движению положения x в направлении колебаний (+X, -X) вдоль соединительной оси Oh, или модулем упругости при кручении, применяемым к углу θ вращения вибратора 50 вокруг центральной оси Oc. Далее в иллюстративных вариантах с первого по четвертый расчеты основаны на допущении, что модуль k упругости является модулем упругости при растяжении или модулем упругости при сжатии, а в пятом иллюстративном варианте расчеты основаны на допущении, что модуль k упругости является модулем упругости при кручении. Здесь термин "модуль упругости при сжатии или растяжении" относится к модулю упругости для упругой силы, пропорциональной длине x сжатия или растяжения, и термин "модуль упругости при кручении" относится к модулю упругости для упругой силы, пропорциональной углу θ вращения вибратора 350, 450 и 550.
[210] Величины коэффициентов p1, p2, p3 в математической формуле 6 получены путем сравнения уравнений колебаний математических формул 11, 21, 13, 14 и 15 для иллюстративных вариантов, которые будут описаны ниже, с математической формулой 6. Как было указано выше, возбуждающая сила Fo(t) для каждого иллюстративного варианта получена так же, как и в вышеприведенных математических формулах 1-5.
[211] Для каждого иллюстративного варианта решение x(t) и амплитуда X(w) можно получить, подставляя полученные коэффициенты p1, p2, p3 и полученную возбуждающую силу Fo(t) в математические формулы 9 и 10 (см. математическую формулу 9), а условие для пиковой величины H(wmax) можно найти (см. математическую формулу 10).
[212] Далее, условия для (i) уравнения принудительных колебаний, (ii) амплитуды X(w), (iii) собственной угловой скорости wn и (iv) пиковой величины в первом иллюстративном варианте со ссылками на фиг.3a и 3b даются следующей математической формулой 11:
[213] Математическая формула 11
[Формула 11]
[214] (i) Уравнение движения:

[215] (ii) Амплитуда: 
[216] (iii) Собственная угловая скорость 
[217] (iv) Условия для пиковой величины: 
[218] где m - масса эксцентрика 55, r - радиус вращения от центра масс эксцентрика 55 на оси Ow вращения, M - масса вибратора 150 и основной части 31 вешалки, движущихся в направлении колебаний (+X, -X), k - модуль упругости при сжатии или растяжении упругого элемента 60 в направлении колебаний (+X, -X), и c - коэффициент демпфирования в направлении колебаний (+X, -X). Для справки,  - сила инерции,
- сила инерции,  - сила демпфирования и
- сила демпфирования и  - упругая сила.
- упругая сила.
[219] Далее, условия для (i) уравнения принудительных колебаний, (ii) амплитуды X(w), (iii) собственной угловой скорости wn и (iv) пиковой величины во втором иллюстративном варианте со ссылками на фиг.4a-4d даются следующей математической формулой 12:
[220] Математическая формула 12
[Формула 12]
[221] (i) Уравнение движения:

[222] (ii) Амплитуда: 
[223] (iii) Собственная угловая скорость:
[224] (iv) Условия для пиковой величины:
[225] где m1 - масса первого эксцентрика 55, m2 - масса второго эксцентрика, r1 - радиус вращения от центра масс первого эксцентрика 55 на оси Ow вращения, r2 - радиус вращения от центра масс второго эксцентрика 56 на оси Ow вращения, M - масса вибратора 250 и основной части 31 вешалки, движущихся в направлении колебаний (+X, -X), k - модуль упругости при сжатии или растяжении упругого элемента 60 в направлении колебаний (+X, -X), и c - коэффициент демпфирования в направлении колебаний (+X, -X). Если m1r1=m2r2, то уравнение  для амплитуды справедливо.
для амплитуды справедливо.
[226] Далее, условия для (i) уравнения принудительных колебаний, (ii) амплитуды X(w), (iii) собственной угловой скорости wn и (iv) пиковой величины в третьем иллюстративном варианте со ссылками на фиг.5a и 5b даются следующей математической формулой 13:
[227] Математическая формула 13
[Формула 13]
[228] (i) Уравнение движения:

[229] Приблизительно, получают  ,
,  , и
, и  . Их подмена дает:
. Их подмена дает:
[230] 
[231] Умножение обеих частей на B дает:
[232] 
[233] (ii) Амплитуда:

[234] (iii) Собственная угловая скорость: 
[235] (iv) Условие для пиковой величины: 
[236] где A - расстояние между центральной осью Oc и осью Ow вращения, B - расстояние между центральной осью Ow и соединительной осью Oh, m - масса эксцентрика 55, r - радиус вращения от центра массы эксцентрика 55 на оси Ow вращения, I - момент инерции вибратора 350 вокруг центральной оси Oc, M - масса основной части 31 вешалки, движущегося в направлении колебаний (+X, -X), k - модуль упругости при растяжении или сжатии упругого элемента 60 в направлении колебаний (+X, -X), и c - коэффициент демпфирования в направлении колебаний (+X, -X). Для справки,  - инерция вращения.
- инерция вращения.
[237] Далее, условия для (i) уравнения принудительных колебаний, (ii) амплитуды X(w), (iii) собственной угловой скорости wn и (iv) пиковой величины в четвертом иллюстративном варианте со ссылками на фиг.6a-6d даются следующей математической формулой 14:
[238] Математическая формула 14
[Формула 14]
[239] (i)Уравнение движения: 
[240] Приблизительно получают  ,
,  , и
, и  . Подмена дает:
. Подмена дает:
[241] 
[242] Умножение обеих частей на B дает:
[243] 
[244] (ii) Амплитуда 
[245] (iii) Собственная угловая скорость: 
[246] (iv) Условие для пиковой величины: 
[247] где A - расстояние между центральной осью Oc и осью Ow вращения, B - расстояние между центральной осью и соединительной осью Oh, m1 - масса первого эксцентрика 55, m2 - масса второго эксцентрика 56, r1 - радиус вращения от центра масс первого эксцентрика 55 на оси Ow вращения, r2 - радиус вращения от центра масс второго эксцентрика 56 на оси Ow вращения, I - момент инерции вибратора 450 вокруг центральной оси Oc, M - масса основной части 31 вешалки движущегося в направлении колебаний (+X, -X), k - модуль упругости при растяжении или сжатии упругого элемента 60 в направлении колебаний (+X, -X), и c - коэффициент демпфирования в направлении колебаний (+X, -X). Если m1r1=m2r2, то уравнение  для амплитуды справедливо.
для амплитуды справедливо.
[248] Далее, условия для (i) уравнения принудительных колебаний, (ii) амплитуды X(w), (iii) собственной угловой скорости wn и (iv) пиковой величины в пятом иллюстративном варианте со ссылками на фиг.7a-7d даются следующей математической формулой 15:
[249] Математическая формула 15
[Формула 15]
[250] (i) Уравнение движения: 
[251] Приблизительно, получают  ,
,  , и
, и  Подстановка дает:
Подстановка дает:
[252] 
[253] Умножение обеих частей на B дает:
[254]
[255] (ii) Амплитуда: 
[256] (iii) Собственная угловая скорость: 
[257] (iv) Условия для пиковой величины: 
[258] где A - расстояние между центральной осью Oc и первой осью Ow1 вращения, A2 - расстояние между центральной осью Oc и второй осью Ow2 вращения B - расстояние между центральной осью и соединительной осью Oh, m1 - масса первого эксцентрика 55, m2 - масса второго эксцентрика 56, r1 - радиус вращения от центра масс первого эксцентрика 55 на первой оси Ow1 вращения, r2 - радиус вращения от центра масс второго эксцентрика 56 на второй оси Ow2 вращения, I - момент инерции вибратора 550 вокруг центральной оси Oc, M - масса основной части 31 вешалки движущегося в направлении колебаний (+X, -X), k - модуль упругости при кручении упругого элемента 60 в направлении колебаний (+X, -X) относительно угла θ вращения, и c - коэффициент демпфирования в направлении колебаний (+X, -X). Если m1r1=m2r2, то уравнение  справедливо.
справедливо.
[259] Далее, на фиг.2 приведен пример графика, который показывает амплитуду X(w) относительно угловой скорости основной части 33 вешалки в установившемся состоянии. Устройство 1 для обработки белья по этому иллюстративному варианту сконфигурировано так, что угловая скорость w эксцентрика 55 и 56 может меняться. Угловую скорость эксцентрика 55, 56 может менять блок управления. Это значит, что имеются две или более заранее заданные угловые скорости w, которые позволяют колебательному движению вибратора 50, 150, 250, 350, 450 и 550 входить в установившееся состояние. Более конкретно, устройство 1 для обработки белья сконфигурировано так, чтобы работать в двух или более установившихся состояниях, меняя угловую скорость w эксцентрика 55, 56.
[260] Для этого устройство 1 сконфигурировано так, чтобы две или более разные угловые скорости w поддерживались в течение заданного времени или дольше. Здесь заранее определенное время может быть задано заранее таким, чтобы быть достаточным для достижения установившегося состояния. Например, это заранее определенное время может быть приблизительно 5 с.
[261] Как показано на фиг.2, устройство 1 для обработки белья сконфигурировано для работы в первом режиме mode1, в котором частота  колебаний основной части 31 вешалки относительно низка, а амплитуда X(w1) относительно велика, и во втором режиме mode2, в котором частота
колебаний основной части 31 вешалки относительно низка, а амплитуда X(w1) относительно велика, и во втором режиме mode2, в котором частота  колебаний основной части 31 вешалки относительно высока, а амплитуда X(w2) относительно мала, изменяя угловую скорость w эксцентрика 55, 56. Благодаря этому движение основной части 31 вешалки можно изменять. Например, белье может колебаться медленно с большой амплитудой X(w) в первом режиме mode1, или белье может колебаться быстро, а не встряхиваться, с малой амплитудой X(w) во втором режиме mode2.
колебаний основной части 31 вешалки относительно высока, а амплитуда X(w2) относительно мала, изменяя угловую скорость w эксцентрика 55, 56. Благодаря этому движение основной части 31 вешалки можно изменять. Например, белье может колебаться медленно с большой амплитудой X(w) в первом режиме mode1, или белье может колебаться быстро, а не встряхиваться, с малой амплитудой X(w) во втором режиме mode2.
[262] В первом режиме mode1 первая угловая скорость w1 эксцентрика 55, 56 поддерживается в течение заданного времени или дольше, и во втором режиме mode2 вторая угловая скорость w2 эксцентрика 55, 56 поддерживается в течение заданного времени или дольше. Вторая угловая скорость w2 задается более высокой, чем первая угловая скорость w1.
[263] Желательно, чтобы частота колебаний для первого режима mode1 была задана более близкой к собственной частоте колебаний, чем частота для второго режима. В первом и втором иллюстративных вариантах частота колебаний для первого режима mode1 задана более близкой к  чем частота колебаний для второго режима mode2, со ссылкой на математические формулы 11 и 12. В иллюстративных вариантах с третьего по пятый частота колебаний для первого режима mode1 задана ближе
чем частота колебаний для второго режима mode2, со ссылкой на математические формулы 11 и 12. В иллюстративных вариантах с третьего по пятый частота колебаний для первого режима mode1 задана ближе  или
или  , чем частота колебаний для второго режима mode2, со ссылками на математические формулы 13-15. Благодаря этому, первый режим mode1 позволяет поддерживать большую амплитуду, в второй ражим mode2 позволяет поддерживать более высокую частоту, не вызывая напряжений в обрабатываемых изделиях.
, чем частота колебаний для второго режима mode2, со ссылками на математические формулы 13-15. Благодаря этому, первый режим mode1 позволяет поддерживать большую амплитуду, в второй ражим mode2 позволяет поддерживать более высокую частоту, не вызывая напряжений в обрабатываемых изделиях.
[264] Как показано на фиг.2, желательно, чтобы амплитуда колебаний основной части 31 вешалки в установившемся состоянии была задана так, чтобы иметь пиковую величину X(Wmax), когда угловая скорость w имеет конкретную величину Wmax больше нуля. Для этого должно быть выполнено условие для пиковой величины, как показано в математических формулах 11-15.
[265] Как показано в математических формулах 11 м 12, для первого и второго иллюстративных вариантов, устройство 1 для обработки белья сконфигурировано для создания пиковой величины X(Wmax), поскольку M и k заданы так, чтобы неравенство  было справедлив, даже если предполагается, что c имеет максимальную величину, принимая во внимание диапазон минимум/максимум и диапазон ошибки (безопасная величина) белья, которая может висеть на основной части 31, 231 вешалки.
было справедлив, даже если предполагается, что c имеет максимальную величину, принимая во внимание диапазон минимум/максимум и диапазон ошибки (безопасная величина) белья, которая может висеть на основной части 31, 231 вешалки.
[266] Как показано математическими формулами 13-15 для иллюстративных вариантов с третьего по пятый, устройство 1 для обработки белья сконфигурировано для создания пиковой величины X(Wmax), поскольку l и k заданы так, чтобы было справедливо неравенство: заранее определенная величина (определяемая I, M, k и B)  даже если предполагается, что c имеет максимальную величину, принимая во внимание диапазон минимум/максимум и диапазон ошибки (величину безопасности) белья, которая может висеть на основной части 31, 431 вешалки.
даже если предполагается, что c имеет максимальную величину, принимая во внимание диапазон минимум/максимум и диапазон ошибки (величину безопасности) белья, которая может висеть на основной части 31, 431 вешалки.
[267] В то же время, в иллюстративных вариантах с третьего по пятый, как показано в математических формулах 13-15, можно видеть, что чем больше расстояние A, A1 и A2, тем больше амплитуда, даже при той же угловой скорости w. Когда расстояние B приближается к нулю, числитель X(w) приближается к нулю, что требует, чтобы расстояние B было равно заданной величине или превышало ее. Однако, поскольку числитель X(w) также увеличивается с увеличением величины B, желательно, чтобы расстояние A, A1, A2 между центральной осью Oc и осью Ow, Ow1, Ow2 вращения было больше, чем расстояние между центральной осью Oc и соединительной осью Oh, чтобы эффективно получить большую амплитуду X(w)при той же угловой скорости w.
[268] Кроме того, теоретические и экспериментальные результаты подсказывают, что более желательно, чтобы отношение A/B расстояния A между центральной осью и осью вращения к расстоянию B между центральной осью Oc и соединительной осью Oh было равно или больше 2,6. Здесь максимальная величина отношения A/B ограничено каркасом 10. То есть, расстояние A не превышает определенную величину, поскольку вибратор расположен внутри шкафа.
[269] Далее со ссылками на фиг.8-24 следует описание некоторых примеров конструкции по настоящему изобретению. Они являются просто примерами конструкции по некоторым иллюстративным вариантам изобретения, и конструкция по настоящему изобретению не ограничена этими примерами. Также, хотя приводимые примеры являются примерами конструкции второго, четвертого и пятого иллюстративных вариантов, специалисты легко могут реализовать первый и третий иллюстративные варианты на основе этих примеров, поэтому описание конструкции по первому и третьему вариантам опускается.
[270] Со ссылками на фиг.15 и 16 будет описан пример конструкции, общий для второго и четвертого иллюстративных вариантов.
[271] Вибратор 250, 450 содержит совершающее колебания основная часть 251, 451, сконфигурированной для перемещения относительно каркаса 10. Вибратор 250 и 450 содержит вал 54 груза, выполняющий функцию оси Ow вращения, и первый и второй эксцентрики 55 и 56, вращающиеся вокруг вала 54 груза.
[272] Первый эксцентрик 55 содержит первую вращающуюся часть 55b, вращающуюся вокруг оси Ow вращения в контакте с трансмиссионной частью 53. Первая вращающаяся часть 55b может содержать центральную часть 55b1, которая находится во вращающемся контакте с валом 54 груза. Вал 54 груза проникает сквозь центральную часть 55b1. Центральная часть 55b1 проходит вдоль оси Ow вращения. Центральная часть 55b1 имеет центральное отверстие, проходящее вдоль оси Ow вращения.
[273] Первая вращающаяся часть 56b может содержать периферийную часть 55b2, установленную на центральной части 55b1. Центральная часть 55b1 установлена так, чтобы проникать в периферийную часть 55b2. Периферийная часть 55b2 может быть сформирована целиком в форме цилиндра, проходящего вдоль оси Ow вращения. В периферийной части 55b2 может быть выполнена монтажная канавка 55b3, в которой находится первый груз 55a. Монтажная канавка 55b3 может быть сформирована так, чтобы ее верхняя часть была открыта. Центробежная сторона монтажной канавки 55b3 вокруг оси Ow вращения может быть заблокирована. Периферийная часть 55b2 и первый груз 55a вращаются как единый узел.
[274] Первый эксцентрик 55 содержит зубчатую часть 55b4, которая принимает крутящий момент в результате зацепления с конической шестерней 53a. Зубчатая часть 55b4 сформирована на нижней стороне периферийной части 55b2. Зубчатая часть 55b4 находится на периметре вокруг оси Ow вращения.
[275] Первый эксцентрик 55 содержит первый груз 55a, прикрепленных к первой вращающейся части 55b. Первый груз 55a вращается интегрально с первой вращающейся частью 55b. Первый груз 55a изготовлен и материал с более высоким удельным весом, чем первая вращающаяся часть 55b.
[276] Первый груз 55a находится с одной стороны от оси Ow вращения в результате чего груз эксцентрика 55 смещен от центра.
[277] Второй эксцентрик 56 содержит вторую вращающуюся часть 56b, вращающуюся вокруг оси Ow вращения в контакте с трансмиссионной частью 53. Вторая вращающаяся часть 56b может содержать центральную часть 56b1, которая находится во вращающемся контакте с валом 54 груза. Вал груза проникает сквозь центральную часть 56b1. Центральная часть 56b1 проходит вдоль оси Ow вращения. Центральная часть 56b1 имеет центральное отверстие, проходящее вдоль оси Ow вращения. Центральная часть 56b1 может быть сформирована в форме трубы.
[278] Вторая вращающаяся часть 56b может содержать периферийную часть 56b2, установленную на центральную часть 56b1. Центральная часть 56b1 проникает в периферийную часть 56b2. Периферийная часть 56b2 может быть сформирована полностью в форме цилиндра, проходящего вдоль оси Ow вращения. В периферийной части 56b2 может быть выполнена монтажная канавка 56b3, в которой находится второй груз 56a. Монтажная канавка 56b3 может быть сформирована так, чтобы ее дно было закрыто. Периферийная часть 56b2 м второй груз 56a вращаются как единый узел.
[279] Второй эксцентрик 56 содержит зубчатую часть 56b4, принимающую крутящий момент за счет зацепления с конической шестерней 53a. Зубчатая часть 56b4 сформирована на верхней стороне периферийной части 56b2. Зубчатая часть 56b4 находится на периметре вокруг оси Ow вращения.
[280] Второй эксцентрик 56 содержит второй груз 56a прикрепленный ко второй вращающейся части 56b. Второй груз 56a вращается интегрально со второй вращающейся частью 56b. Второй груз 56a изготовлен из материала, удельный вес которого больше чем у второй вращающейся части 56b.
[281] второй груз 56a установлен с одной стороны от оси Ow вращения в результате чего груз второго эксцентрика 56 смещен от центра.
[282] Первый эксцентрик 55 и второй эксцентрик 56 могут быть разнесены друг от друга вдоль центральной оси Oc. Первый эксцентрик и второй эксцентрик могут быть обращены друг к другу. Первый эксцентрик 55 может быть расположен над вторым эксцентриком 56.
[283] Как показано на фиг.5, когда вал 52a двигателя и коническая шестерня 53a вращаются в одном направлении, первый эксцентрик 55 и второй эксцентрик 56 вращаются в противоположных направлениях.
[284] Один вал 54 груза прикреплен к колеблющемуся телу 251, 451. Верхний и нижний концы вала 54 груза может быть прикреплен к кожуху 51b груза. Вал 54 груза может проникать сквозь первый эксцентрик 55 и второй эксцентрик 56.
[285] Колеблющееся тело 251, 451 может содержать кожух 51b груза, в котором находится первый эксцентрик 55 и второй эксцентрик 56. Кожух 51b груза может содержать первую часть 51b, образующую верхнюю часть, и вторую часть 51b1, образующую нижнюю часть. Вторая часть 51b1 может определять внутреннее пространство, являясь нижней поверхностью и периферийной поверхностью, а первая часть 51b может закрывать вершину внутреннего пространства. Кожух 51b груза может крепиться к двигателю 52. С одной стороны кожуха 51b груза может быть выполнено отверстие, через которое вставляется вал 52a двигателя.
[286] Вал 52a двигателя вставлен и проходит между первым эксцентриком 55 и вторым эксцентриком 56. Вал 52a двигателя соединен с трансмиссионной частью 53.
[287] Трансмиссионная часть 53 содержит коническую шестерню 53a, которая вращается интегрально с валом 52a двигателя. Коническая шестерня 53a имеет множество зубьев, расположенных вдоль периметра вала 52a двигателя. Коническая шестерня 53a расположена между первым эксцентриком 55 и вторым эксцентриком 56.
[288] Трансмиссионная часть 53 может содержать трансмиссионный вал 53g, который поддерживает с возможностью вращения коническую шестерню 53a. Трансмиссионный вал 53g может поддерживаться валом 54 груза. Один конец трансмиссионного вала 53g может быть прикреплен к валу 54 груза, а другой конец может быть вставлен в центр конической шестерни 53a.
[289] Описание элементов общих для второго и четвертого иллюстративных вариантов приведено выше. Далее следует описание, фокусирующееся на элементах, отличающихся во втором и четвертом иллюстративных вариантах.
[290] Далее со ссылками на фиг.8-10 следует описание примеров конструкции вибратора 250, упругого элемента 260 и поддерживающего элемента 270 по второму иллюстративному варианту. Колеблющееся тело 251 по второму иллюстративному варианту прикреплено к основной части 231 вешалки и движется интегрально с основной частью 231 вешалки.
[291] Кожух 51b груза может быть расположен перед двигательной частью 52. Вал 52a двигателя может выступать вперед.
[292] Узел 258 привода вешалки соединяет и удерживает соединенными колеблющееся тело 251 и основную часть 231 вешалки. Узел 258 привода вешалки прикреплен к колеблющемуся телу 251. Узел 258 привода вешалки может выступать и проходить вниз от колеблющегося тела 251 так, чтобы его нижний конец был прикреплен к основной части 231 вешалки. Нижний конец узла 258 привода вешалки прикреплен к ведомому узлу 231b вешалки. Узел 258 привода вешалки совершает колебания интегрально с ведомым узлом 231b вешалки.
[293] Как показано на фиг.9, соединительная ось Oh проходит между осью Ow вращения и центром Mm масс двигателя 52. Если смотреть с направления протяженности (сверх) оси Ow вращения, узел 258 привода вешалки прикреплен к основной части 231 вешалки в положении между центром Mm масс двигателя 52 и первой осью Ow вращения.
[294] Когда вибратор 250 совершает возвратно-поступательные движения влево и вправо, упругий элемент 260 может упруго деформироваться участком 259 запирания упругого элемента или сила восстановления упругого элемента 260 передается на участок 259 запирания упругого элемента. Участок 259 запирания упругого элемента расположен на кожухе 51b груза.
[295] Участок 259 запирания упругого элемента может содержать первую запирающую часть 259a, на которой заперт один конец первого упругого элемента 60a. Первая запирающая часть 259a может быть сформирована на одной стороне (+X) кожуха 51b груза. Участок 259 запирания упругого элемента может содержать вторую запирающую часть 259b, не которой заперт один конец второго упругого элемента 60b. Втора запирающая часть 259b может быть сформирована на другой стороне (-X) кожуха 51b груза.
[296] Упругий элемент 260 может быть расположен между вибратором 250 и поддерживающим элементом 270. Один конец упругого элемента 260 заперт на вибраторе 250, а другой конец заперт на участке 277 крепления упругого элемента поддерживающего элемента 270. Упругий элемент 260 может содержать пружину, работающую на растяжение и/или пружину, работающую на сжатие. Пара упругих элементов 60a, 60b может быть расположена с обеих сторон от соединительной оси Oh в направлении колебаний (+X, -X).
[297] Может иметься множество упругих элементов 60a, 60b. Упругие элементы 60a, 60b могут быть сконфигурированы для упругой деформации, когда вибратор 250 движется в одну сторону в направлении колебаний (+X, -X), и восстанавливать упругость при движении в другую сторону. Упругие элементы 60a, 60b могут быть сконфигурированы для упругой деформации, когда основная часть 231 вешалки движется в одну сторону в направлении колебаний (+X, -X) и восстанавливать упругость, когда оно движется в другую сторону.
[298] Первый упругий элемент 60a расположен на одной стороне (+X) колеблющегося тела 251. Один конец первого упругого элемента 60a может быть заперт на первой запирающей части 259a, а другой конец может быть заперт на первом участке 277a крепления поддерживающего элемента 270. Первый упругий элемент 60a может содержать пружину, которая упруго деформируется в направлении колебаний (+X, -X) и восстанавливает свою упругость.
[299] Второй упругий элемент 60b расположен на другой стороне (-X) колеблющегося тела 251. Один конец упругого элемента 60b может быть заперт на втором участке 277b крепления поддерживающего элемента 270. Второй упругий элемент 60b может содержать пружину, которая упруго деформируется в направлении колебаний (+X, -X) и восстанавливает свою упругость.
[300] Поддерживающий элемент 270 содержит участок 277 крепления упругого элемента, к которому прикреплен один конец упругого элемента 260. Участок 277 крепления упругого элемента может быть прикреплен к внутренней раме 11a. Первый участок 277a крепления и второй участок 277b крепления разнесены друг от друга в противоположных направлениях относительно соединительной оси Oh.
[301] Поддерживающий элемент 270 далее может содержать направляющую 278 вибратора, которая позволяет вибратору 250 двигаться в направлении колебаний (+X, -X), но ограничивает движение в направлении (+Y, -Y), пересекающем направление колебаний (+X, -X). Направляющая 278 вибратора может контактировать с узлом 258 привода вешалки и направлять узел 258 привода вешалки в направлении колебаний (+X, -X). Направляющая 278 вибратора может быть расположена между парой участков 277a и 277b крепления. Направляющая 278 вибратора может быть расположена под колеблющимся телом 251. Направляющая 278 вибратора может быть сформирована в форме горизонтальной пластины. Направляющая 278 вибратора прикреплена к каркасу 10.
[302] Далее со ссылками на фиг.11-14 следует описание вибратора 450, упругого элемента 460 и поддерживающего элемента 470 по четвертому иллюстративному варианту настоящего изобретения. Колеблющееся тело 451 по пятому иллюстративному варианту сконфигурировано для вращения вокруг центральной оси Oc.
[303] В четвертом иллюстративном варианте кожух 51b груза отнесен от центральной оси Oc в центробежном направлении Dr1. Кожух 51b груза и узел 458 привода вешалки могут быть разнесены друг от друга в противоположных направлениях относительно центральной оси Oc. Соединительная ось Oh и ось Ow вращения могут быть разнесены друг от друга в противоположных направлениях относительно центральной оси Oc. Двигатель 52 может быть расположен между центральной осью Oc и осью Ow вращения. Вал 52a двигателя может выступать в центробежном направлении Dr1. Вал 52a двигателя может выступать в направлении -Y.
[304] Колеблющееся тело 451 может содержать кожух 451d основания, поддерживаемый с возможностью вращения центральным осевым участком 475. Центральный осевой участок 475 проникает в кожух 451d основания. Подшипник B установлен между центральным осевым участком 475 и кожухом 451d основания. Кожух 451d основания расположен между кожухом 51b груза и участком 451c крепления упругого элемента.
[305] Колеблющееся тело 451 может содержать участок 451e поддержки двигателя, поддерживающий двигатель 52. Участок 451e поддержки двигателя может поддерживать нижний конец двигателя. Участок 451e поддержки двигателя может быть расположен между кожухом 51b груза и кожухом 451d основания.
[306] Колеблющееся тело 451 может содержать держатель 451c упругого элемента, на котором заперт один конец упругого элемента 460. Когда вибратор 450 вращается и совершает колебания, держатель 451c упругого элемента прилагает давление к упругому элементу 460 или принимает восстанавливающую силу от упругого элемента 460.
[307] Держатель 451c упругого элемента может быть расположен на одном конце колеблющегося тела 451 в центробежном направлении Dr1. Держатель 451c упругого элемента может соединять и проходить между центральной осью Oc и соединительной осью Oh. Держатель 451c упругого элемента может проходить в центробежном направлении Dr1 и, следовательно, иметь дистальный конец. Держатель 451c упругого элемента расположен на другой стороне от первой и второй осей Ow вращения относительно центральной оси Oc. Держатель 451c упругого элемента может быть прикреплен к кожуху 451d основания. Держатель 451c, кожух 451d и участок 451e поддержки двигателя могут быть сформированы как единый узел.
[308] В четвертом иллюстративном варианте двигатель 52 может быть отнесен от центральной оси Oc. Двигатель 52 может быть расположен между центральной осью Oc и первой и второй осями Ow вращения. Двигатель 52 имеет вал 52a двигателя, проходящий перпендикулярно центральной оси Oc. Вал 52a двигателя может выступать из двигателя в центробежном направлении Dr1.
[309] Узел 458 привода вешалки соединен с основной частью 431 вешалки в положении, отнесенном от центральной оси Oc. Узел 458 привода вешалки может быть выполнен с возможностью соединения с основной частью 431 вешалки снаружи, в положении, отнесенном от центральной оси Oc.
[310] Узел 458 привода вешалки может содержать выступающую часть 458a, которая выступает вдоль соединительной оси Oh. Выступающая часть 458a выступает вниз от узла 458 привода вешалки. Выступающая часть 458a выступает вдоль соединительной оси Oh. Узел 458 привода вешалки может содержать соединительный стержень 458a и 458b, содержащий выступающую часть 458a Соединительный стержень 458a и 458b может быть выполнен как отдельный элемент. Один конец 458a соединительного стержня 458a и 458b может быть вставлен в прорезь 431bh ведомого узла 431b вешалки Соединительный стержень 458a, 458b преобразует вращение вибратора 450 в возвратно поступательные движения основной части 431 вешалки.
[311] Соединительный стержень 458a и 458b прикреплен к колеблющемуся телу 451. Верхний конец соединительного стержня 458a и 458b может быть прикреплен к колеблющегося тела 451. Соединительный стержень 458a и 458b вращается интегрально с колеблющимся телом 451. Соединительный стержень 458a и 458b может быть расположен на соединительной оси Oh. Соединительный стержень 458a и 458b может передавать крутящий момент колеблющегося тела 451 на основную часть 431 вешалки.
[312] Соединительный стержень 458a и 458b может содержать вертикальный удлинитель 458b, проходящий в направлении вверх-вниз. Вертикальный удлинитель 458b может проходить вдоль соединительной оси Oh. Верхний конец вертикального удлинителя 458b может быть прикреплен к держателю 451c упругого элемента. Соединительный стержень 458a и 458b содержит выступающую часть 458a, сформированную на дистальном конце вертикального удлинителя 458b. Выступающая часть 458a расположена на нижнем конце вертикального удлинителя 458b.
[313] Вибратор 450 содержит участок 459 запирания упругого элемента не котором заперт один конец упругого элемента 460. Когда вибратор 450 вращается вокруг центральной оси Oc, упругий элемент 460 упруго деформируется участком 459 запирания упругого элемента, или восстанавливающая сила упругого элемента 460 передается на участок 459 запирания упругого элемента. Участок 459 запирания упругого элемента расположен на держательной части 451c упругого элемента.
[314] Участок 459 запирания упругого элемента может содержать первую запирающую часть 459a, на которой заперт один конец первого упругого элемента 60a. Первая запирающая часть 459a может быть сформирована на одной стороне (+X) Держателя 451c упругого элемента. Участок 459 запирания упругого элемента может содержать вторую запирающую часть 459b на которой заперт один конец второго упругого элемента 60b. Вторая запирающая часть 459a может быть сформирована на другой стороне (-X) держателя 451c упругого элемента.
[315] Упругий элемент 460 может быть расположен между вибратором 450 и поддерживающим элементом 470. Один конец упругого элемента 460 заперт на вибраторе 450, а другой конец заперт на участке 477 крепления упругого элемента поддерживающего элемента 470. Упругий элемент 460 может содержать пружину, работающую на растяжение и/или пружину, работающую на сжатие. Пара упругих элементов 60a, 60b может быть расположена с обеих сторон от соединительной оси Oh в направлении колебаний (+X, -X). Упругий элемент 460 может быть отнесен от центральной оси Oc.
[316] Может иметься множество упругих элементов 60a, 60b. Упругие элементы 60a, 60b могут быть сконфигурированы для упругой деформации, когда вибратор 450 движется либо по часовой стрелке в направлении Dl1, либо против часовой стрелки в направлении Dl2, и для восстановления упругости, когда он движется в другом направлении. Упругие элементы 60a, 60b могут быть сконфигурированы для упругой деформации, когда основная часть 431 вешалки движется в одну сторону в направлении колебаний (+X, -X), и для восстановления упругости, когда оно движется в другую сторону.
[317] Первый упругий элемент 60a расположен на одной стороне (+X) колеблющегося тела 451. Один конец первого упругого элемента 60a может быть заперт на первой запирающей части 459a, а другой конец может быть заперт на первом крепежном участке 477a поддерживающего элемента 470. Первый упругий элемент 60a может содержать пружину, упруго деформирующуюся в направлении колебаний (+X, -X) и восстанавливающую свою упругость.
[318] Второй упругой элемент 60b расположен на другой стороне (-X) колеблющегося тела 451. Держатель 451c крепления упругого элемента расположен между первым упругим элементом 60a и вторым упругим элементом 60b. Один конец второго упругого элемента 60b может быть заперт на втором запирающем участке 459b, а другой конец может быть заперт на втором крепежном участке 477b поддерживающего элемента 470. Второй упругий элемент 60b может содержать пружину, упруго деформирующуюся в направлении колебаний (+X, -X) и восстанавливающую свою упругость.
[319] Поддерживающий элемент 470 может содержать центральный осевой участок 475, выступающий вдоль центральной оси Oc. Центральный осевой участок 475 может выступать вверх от центрального осевого поддерживающего участка 476 Центральный осевой участок 475 вставлен в отверстие, сформированное в колеблющегося тела 451. Центральный осевой участок 475 поддерживает с возможностью вращения колеблющееся тело 451 через подшипник B.
[320] Поддерживающий элемент 470 может содержать центральный осевой поддерживающий участок 476, к которому прикреплен центральный осевой участок 475. Центральный осевой поддерживающий участок 476 может быть расположен на расстоянии под колеблющимся телом 451. Центральный осевой поддерживающий участок 476 прикреплен к каркасу 10.
[321] Поддерживающий элемент 470 содержит участок 477 крепления упругого элемента, к которому прикреплен один конец упругого элемента 460. Участок 477 крепления упругого элемента прикреплен к каркасу 10. Участок 477 крепления упругого элемента может быть прикреплен к внутренней раме 11a. Первый крепежный участок 477a и второй крепежный участок 477b разнесены друг от друга в противоположных направлениях относительно соединительной оси Oh.
[322] Далее со ссылками на фиг.17-24 следует описание конфигурации вибратора 550, упругого элемента 560 и поддерживающего элемента 570 по пятому иллюстративному варианту настоящего изобретения. Колеблющееся тело 551 по пятому иллюстративному варианту выполнено с возможностью вращения вокруг центральной оси Oc.
[323] Колеблющееся тело 551 может содержать кожух 551b груза, в котором находятся первый эксцентрик 55 и второй эксцентрик 56. Кожух 551b груза может определять внешний вид верхней части вибратора 550. Верхние концы валов 554a и 554b груза прикреплены к кожуху 551b груза. Кожух 551b груза содержит первую часть 551b1, закрывающую верхнюю часть эксцентрика 55, и вторую часть 551b2, закрывающую верхнюю часть второго эксцентрика 56. Верхний конец первого вала 554a груза прикреплен к первой части 551b1. Верхний конец второго вала 551b груза прикреплен ко второй части 551b2.
[324] Колеблющееся тело 551 может содержать кожух 551d основания, определяющий внешний вид нижней части. Нижние концы валов 554a, 554b груза прикреплены к кожуху 551d основания. Первый эксцентрика 55 и второй эксцентрик 56 расположены между кожухом 551b груза и кожухом 551d основания. Первый эксцентрик 55 расположен между первой частью 551b1 и кожухом 551d основания. Второй эксцентрик 56 расположен между второй частью 551b2 и кожухом 551d основания.
[325] Колеблющееся тело 551 может содержать участок 551e поддержки двигателя, поддерживающий двигатель 552. Участок 551e поддержки двигателя может поддерживать нижний конец двигателя 552. Участок 551e поддержки двигателя расположен между первой частью 551b1 и второй частью 551b2. Вал 552a двигателя может проникать в участок 551e поддержки двигателя. Участок 551e поддержки двигателя может быть прикреплен к кожуху 551b груза и может быть сформирован интегрально с кожухом 551b груза.
[326] Колеблющееся тело 551 может содержать участок 551c крепления упругого элемента, на котором заперт один конец по меньшей мере одного упругого элемента 560. Участок 551c крепления упругого элемента может быть расположен в верхней части колеблющегося тела 551. Участок 551c крепления упругого элемента может быть прикреплен к верхним концам первой части 551b1 и второй части 551b2. Участок 551c крепления упругого элемента может пересекать центральную ось Oc. Центральная осевая часть 575 может проникать в участок 551c крепления упругого элемента.
[327] Колеблющееся тело 551 может иметь центральную канавку 551h или отверстие, в которое вставлен центральный осевой участок 575. Центральная канавка 551h может быть сформирована на верхней стороне и/или нижней стороне колеблющегося тела 551. В этом иллюстративном варианте центральная канавка 551h сформирована на участке 551c крепления упругого элемента. В центральной канавке 551h установлен подшипник B1 так, чтобы колеблющееся тело 551 могло поддерживаться с возможностью вращения на центральной осевой части 575.
[328] Двигатель 552 может быть расположен на центральной оси Oc. Двигатель 552 расположен между первым эксцентриком 55 и вторым эксцентриком 56. Двигатель 552 имеет вал 552a двигателя, расположенный на центральной оси Oc. Вал 552a двигателя может выступать вниз и соединяться с трансмиссионной частью 533.
[329] Трансмиссионная часть 553 содержит центральную трансмиссионную часть 553c, которая вращается интегрально с валом 552a двигателя. Центральная трансмиссионная часть 553c может быть прикреплена к валу 552a двигателя. Трансмиссионная часть 553 может содержать первую трансмиссионную часть 553a, содержащую шестерню или ремень для передачи крутящего момента от центральной трансмиссионной части 553c на первый эксцентрик 55. Трансмиссионная часть 553 может содержать вторую трансмиссионную часть 553b, содержащую шестерню или ремень для передачи крутящего момента от центральной трансмиссионной части 553c на второй эксцентрик 56.
[330] Первый вал 554a груза и второй вал 554b груза сформированы как отдельные элементы. Первый вал 554a груза расположен на первой оси Ow1 вращения. Второй вал 554b груза расположен на второй оси Ow вращения. Первый вал 554a груза и второй вал 554b груза проходят в противоположных направлениях относительно центральной оси Oc. Первый вал 554a груза и второй вал 554b груза расположены симметрично относительно центральной оси Oc. Первый вал 554a груза и второй вал 554b груза прикреплены к колеблющемуся телу 551. Первый вал 554a груза проникает в первую вращающуюся часть 555b Второй вал 554b груза проникает во вторую вращающуюся часть 556b.
[331] Первый эксцентрик 55 и второй эксцентрик 56 помещены в противоположных направлениях относительно центральной оси Oc. Первый эксцентрик 55 и второй эксцентрик 56 могут быть обращены друг к другу по горизонтали. Первый эксцентрик 55 может быть расположен на одной стороне (+X) в направлении колебаний (+X, -X), а второй эксцентрик 56 может быть расположен на другой стороне (-X).
[332] Первый эксцентрик 55 может содержать первый груз 555a и первую вращающуюся часть 555b. Первая вращающаяся часть 555b может содержать центральную часть 555b1 которая находится во вращающемся контакте с первым валом 554a груза. Первый вал 554a груза проникает в центральную часть 555b1. Центральная часть 555b1 проходит вдоль первой оси Ow1 вращения. Центральная часть 555b имеет центральное отверстие, ориентированное вдоль первой оси Ow вращения.
[333] Первая вращающаяся часть 555b может содержать периферийную часть 555b2, установленную на центральную часть 555b1. Центральная часть 555b1 проникает в периферийную часть 555b2. Периферийная часть 555b2 может быть сформирована полностью в форме цилиндра, проходящего вдоль первой оси Ow1 вращения. В периферийной части 555b2 может быть выполнена монтажная канавка 555b3, в которой лежит первый груз 555a. Монтажная канавка 555b3 может быть сформирована с открытым верхом. Центробежная сторона монтажной канавки 555b3 вокруг первой оси Ow1 вращения может быть закрыта. Периферийная часть 555b2 и первый груз 555a вращаются как единый узел.
[334] Второй эксцентрик 56 может содержать второй груз 556a и вторую вращающуюся часть 556b. Вторая вращающаяся часть 556b может содержать центральную часть 556b1, которая находится во вращающемся контакте с со вторым валом 554b груза. Второй вал 554b груза проникает в центральную часть 556b1. Центральная часть 556b1 проходит вдоль второй оси Ow2 вращения. Центральная часть 556b1 имеет центральное отверстие, ориентированное вдоль второй оси Ow2 вращения.
[335] Вторая вращающаяся часть 556b может содержать периферийную часть 556b2, установленную на центральную часть 556b1. Центральная часть 556b1 проникает в периферийную часть 555b2. Периферийная часть 556b2 может быть сформирована полностью в форме цилиндра, проходящего вдоль второй оси Ow2 вращения. В периферийной части 556b2 может быть выполнена монтажная канавка 556b3, в которой лежит второй груз 556a. Монтажная канавка 556b3 может быть сформирована с открытым верхом. Центробежная сторона монтажной канавки 556b3 вокруг второй оси Ow2 вращения может быть закрыта. Периферийная часть 556b2 и второй груз 556a вращаются как единый узел.
[336] Трансмиссионная часть 553 содержит центральную трансмиссионную часть 553c зубчатого типа. Центральная ось Oc может проходить через центр центральной трансмиссионной части 553c Центральная трансмиссионная часть может содержать прямозубую шестерню. Трансмиссионная часть 553 может содержать первую трансмиссионную часть 553a, которая вращается в результате зацепления с центральной трансмиссионной частью 553c. Первая трансмиссионная часть 553a может содержать прямозубую шестерню. Трансмиссионная часть 553 может содержать вторую трансмиссионную часть 553b, которая вращается в результате зацепления с центральной трансмиссионной частью 553c. Вторая трансмиссионная часть 553b может содержать прямозубую шестерню.
[337] Трансмиссионная часть 553 содержит первый трансмиссионный вал 553f, выполняющий функцию оси вращения для первой трансмиссионной части 553a. Первый трансмиссионный вал 553f может быть прикреплен к колеблющемуся телу 551. Также трансмиссионная часть 553 содержит второй трансмиссионный вал 553g, выполняющий функцию оси вращения для второй трансмиссионной части 553b. Второй трансмиссионный вал 553g может быть прикреплен к колеблющемуся телу 551.
[338] Первый эксцентрик 55 содержит зубчатый участок 555b4, который принимает крутящий момент за счет зацепления с первой трансмиссионной частью 553a. Зубчатый участок 555b4 сформирован вдоль периметра периферийной части 555b2. Крутящий момент от вала 552a двигателя передается последовательно на центральную трансмиссионную часть 553c, первую трансмиссионную часть 553a и, затем, на зубчатый участок 555b4.
[339] Второй эксцентрик 56 содержит зубчатый участок 556b4, который принимает крутящий момент за счет зацепления со второй трансмиссионной частью 553b. Зубчатый участок 556b4 сформирован вдоль периметра периферийной части 556b2. Крутящий момент от вала 552a двигателя передается последовательно на центральную трансмиссионную часть 553c, вторую трансмиссионную часть 553b и, затем, на зубчатый участок 556b4.
[340] Как показано для примера на фиг.34, когда центральная трансмиссионная часть 553c вращается по часовой стрелке, первая трансмиссионная часть 553a и вторая трансмиссионная часть 553b вращаются против часовой стрелки, а первый эксцентрик 55 и второй эксцентрик 56 вращаются по часовой стрелке. На фиг.11 показано положение центральной оси Oc, первой оси Ow1 вращения, второй оси Ow2 вращения и соединительной оси Oh.
[341] Узел 558 привода вешалки содержит вращающийся выступ 558c, прикрепленный к колеблющемуся телу 551. Верхний конец вращающегося выступа 558c может быть прикреплен к нижней стороне колеблющегося тела 551. Вращающийся выступ 558c вращается интегрально с колеблющимся телом 551. Вращающийся выступ проникает в нижний поддерживающий участок 571 вдоль центральной оси Oc. Между вращающимся выступом 558 и нижним поддерживающим участком 571 может быть установлен подшипник B2, поэтому нижний поддерживающий участок 571 поддерживает с возможностью вращения вращающийся выступ 558c. Вращающийся выступ 558c может передавать крутящий момент от колеблющегося тела 551 на соединительный стержень 558a и 558b.
[342] Узел 558 привода вешалки содержит соединительный стержень 558a и 558b, который передает крутящий момент от вибратора 50 на основную часть 431 вешалки. Соединительный стержень 558a и 558b прикреплен к вращающемуся выступу 558c и вращается интегрально с вращающимся выступом 558c. Соединительный стержень 558a и 558b может быть прикреплен к нижнему концу вращающегося выступа 558c. Соединительный стержень 558a и 558b содержит центробежный удлинитель 558b, который проходит от вращающегося выступа 558c в центробежном направлении Dr1. Дистальный конец центробежного выступа 558b проходит вдоль серединного направления Dr2 и прикреплен к вращающемуся выступу 558c. Соединительный стержень 558a и 558b содержит выступающую часть 558a, выступающую вдоль соединительной оси Oh. Выступающая часть 558a может выступать вниз от дистального конца центробежной части 558b в центробежном направлении Dr1.
[343] Вибратор 50 содержит упругий участок 559 запирания упругого элемента, на котором заперт один конец упругого элемента 560. Когда вибратор 50 вращается вокруг центральной оси Oc, упругий элемент 560 упруго деформируется участком 559 запирания упругого элемента, или восстанавливающая сила упругого элемента 560 передается на участок 559 запирания упругого элемента. Участок 559 запирания упругого элемента может быть фиксировано помещен на колеблющееся тело 551.
[344] Участок 559 запирания упругого элемента может содержать первую запирающую часть 559a, на которой заперт один конец первого упругого элемента 60a. Первая запирающая часть 559a может быть сформирована на верхней стороне держателя 551c упругого элемента. Держатель 559 упругого элемента может содержать вторую запирающую часть (не показана), на которой заперт один конец второго упругого элемента 60b. Вторая запирающая часть сформирована на нижней стороне кожуха 551d основания. Участок 559 запирания упругого элемента может содержать третью запирающую часть (не показана), на которой заперт один конец третьего упругого элемента 60c. Третья запирающая часть может быть сформирована на соединительном стержне 558a и 558b.
[345] Упругий элемент 560 может быть расположен между вибратором 50 и поддерживающим элементом 570. Один конец упругого элемента 560 заперт на вибраторе 50, а другой конец заперт на участке 577 крепления упругого элемента поддерживающего элемента 570. Упругий элемент 560 может содержать торсионную пружину.
[346] Может иметься множество упругих элементов 60a, 60b, 60c. Упругие элементы 60a, 60b, 60c могут быть сконфигурированы для упругой деформации, когда вибратор вращается либо по часовой стрелке в направлении Dl1, либо в направлении против часовой стрелки и восстанавливать упругость, когда он вращается в другом направлении.
[347] Первый упругий элемент 60a расположен на верхней стороне вибратора 50. Один конец первого упругого элемента 60a может быть заперт на первой запирающей части 559a, а другой конец может быть заперт на первом крепежном участке 577a поддерживающего элемента 570. Первый упругий элемент 60a может содержать торсионную пружину, расположенную вокруг периметра центральной осевой части 575.
[348] Первый упругий элемент 60b расположен на нижней стороне вибратора 50. Один конец первого упругого элемента 60b может быть заперт на втором запирающем участке на вибраторе 50, а другой конец может быть заперт на втором крепежном участке 577b поддерживающего элемента 570. Второй упругий элемент 60b может содержать торсионную пружину, расположенную вокруг вращающегося выступа 558c.
[349] Третий упругий элемент 60c расположен под нижним поддерживающим участком 571. Третий упругий элемент 60c может быть расположен между нижним поддерживающим участком 571 и соединительным стержнем 558a и 558b. Один конец третьего упругого элемента 60c может быть заперт на третьем запирающем участке вибратора 50, а другой конец может быть заперт на третьем крепежном участке (не показан) поддерживающего элемента 570.
[350] Поддерживающий элемент 570 содержит нижний поддерживающий участок 571, расположенный на нижней стороне колеблющегося тела 551. Нижний поддерживающий участок 571 может быть сформирован в форме горизонтальной пластины. Нижний поддерживающий участок 571 имеет отверстие, сформированное на центральной оси Oc, и в это отверстие вставлен вращающийся выступ 558c. В отверстии в нижнем поддерживающем участке 571 установлен подшипник B2, поддерживающий с возможностью вращения вращающийся выступ 558c.
[351] Поддерживающий элемент 570 содержит верхний поддерживающий участок 572, расположенный на верхней стороне колеблющегося тела 551. Верхний поддерживающий участок 572 может быть сформирован в форме горизонтальной пластины. Поддерживающий элемент 570 содержит центральную осевую часть 575, выступающую из верхнего поддерживающего участка 572 вдоль центральной оси Oc. Центральная осевая часть 575 может выступать вниз от нижней стороны верхнего поддерживающего участка 572. Нижний конец центральной осевой части 575 вставлен в центральную канавку 551h колеблющегося тела 551. Центральная осевая часть 575 поддерживает с возможностью вращения колеблющееся тело через подшипник B1.
[352] Поддерживающий элемент 570 содержит вертикальный соединитель 573, который соединяет нижний поддерживающий участок 571 и верхний поддерживающий участок 572. Вертикальный соединитель 573 проходит в направлении вверх-вниз. Пара вертикальных соединительных частей 573 может быть установлена на любом конце верхнего поддерживающего участка 572. Верхний поддерживающий участок 572 может быть прикреплен к нижнему поддерживающему участку 571 вертикальным соединительной частью 573.
[353] Поддерживающий элемент 570 содержит участок 577 крепления упругого элемента, на котором заперт один конец упругого элемента 560. Первый крепежный участок 577a фиксировано расположен на нижней стороне верхнего поддерживающего участка 572. Второй крепежный участок 577b фиксировано расположен на верхней стороне нижнего поддерживающего участка 571. Третий крепежный участок фиксировано расположен на нижней стороне нижнего поддерживающего участка 571.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ БЕЛЬЯ | 2018 |
|
RU2832008C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ БЕЛЬЯ | 2018 |
|
RU2741904C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ БЕЛЬЯ | 2018 |
|
RU2829125C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ БЕЛЬЯ | 2018 |
|
RU2829127C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ БЕЛЬЯ | 2018 |
|
RU2743073C1 |
| ЛЕКАРСТВЕННЫЙ ПРЕПАРАТ, ОБЛАДАЮЩИЙ ИММУНОМОДЕЛИРУЮЩИМ, ИММУНОКОРРЕГИРУЮЩИМ, ПРОТИВОПАРАЗИТАРНЫМ, ПРОТИВОСКЛЕРОТИЧЕСКИМ, ПРОТИВОВИРУСНЫМ, ПРОТИВОБАКТЕРИАЛЬНЫМ, ПРОТИВОГРИБКОВЫМ, ПРОТИВОВОСПАЛИТЕЛЬНЫМ И ПРОТИВООПУХОЛЕВЫМ ДЕЙСТВИЕМ, И СПОСОБ ЕГО ПРИГОТОВЛЕНИЯ | 2001 |
|
RU2197248C2 |
| Вибрационно-центробежный сепаратор | 1988 |
|
SU1558510A1 |
| Устройство для вибрационной обработки | 1989 |
|
SU1703409A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ БЕЛЬЯ | 2019 |
|
RU2757246C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ БЕЛЬЯ | 2019 |
|
RU2772179C2 |


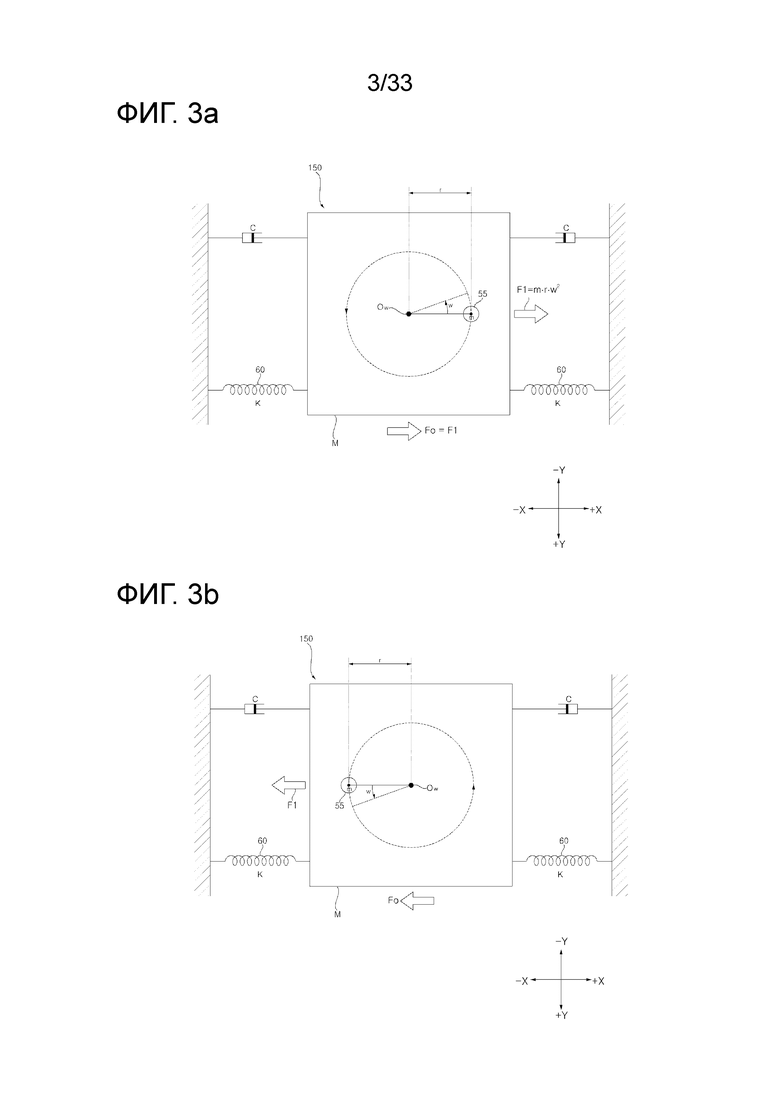

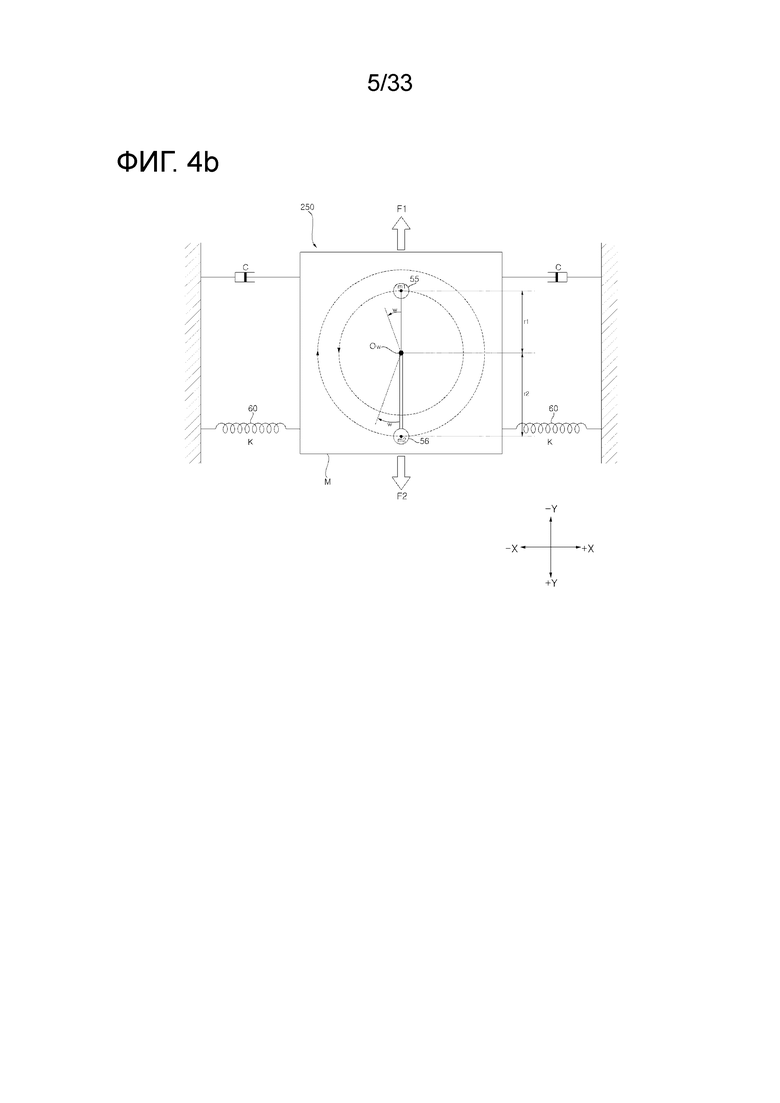


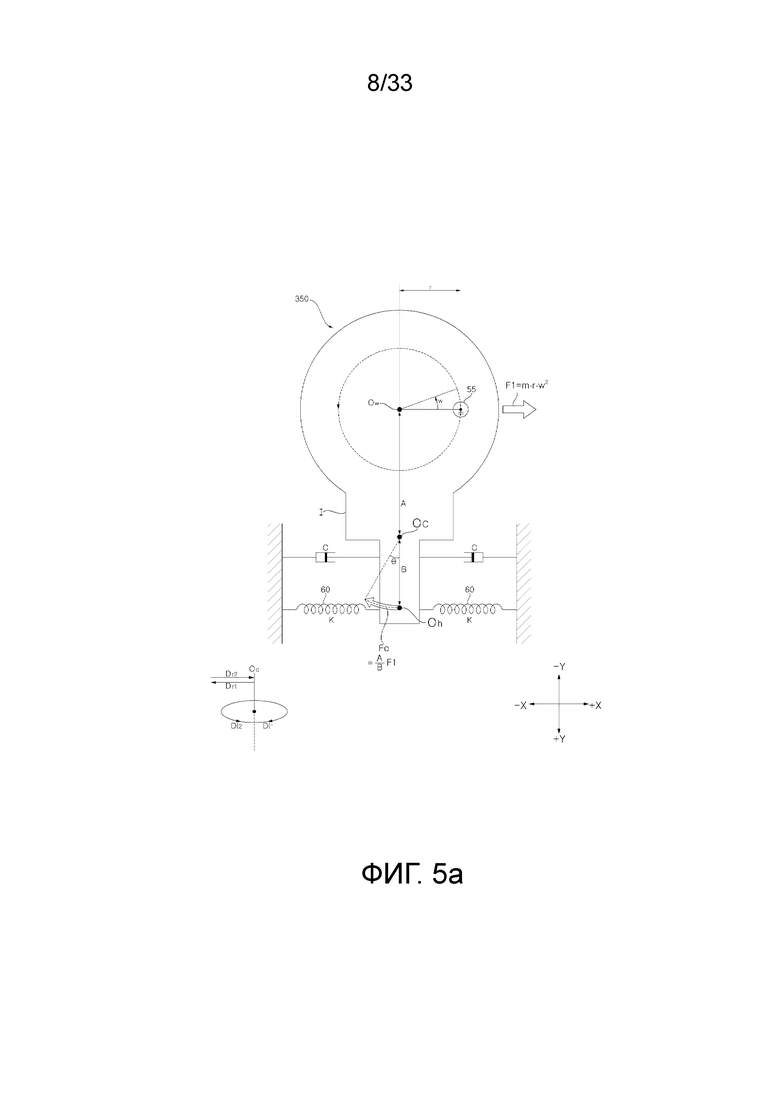






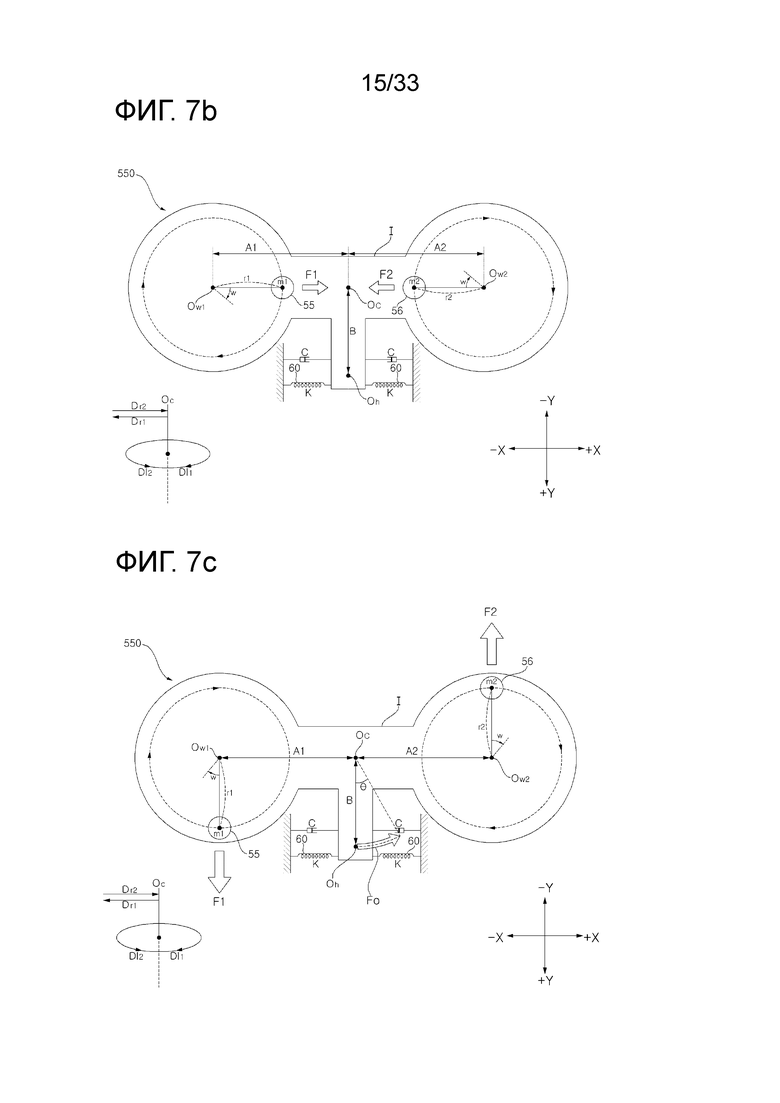

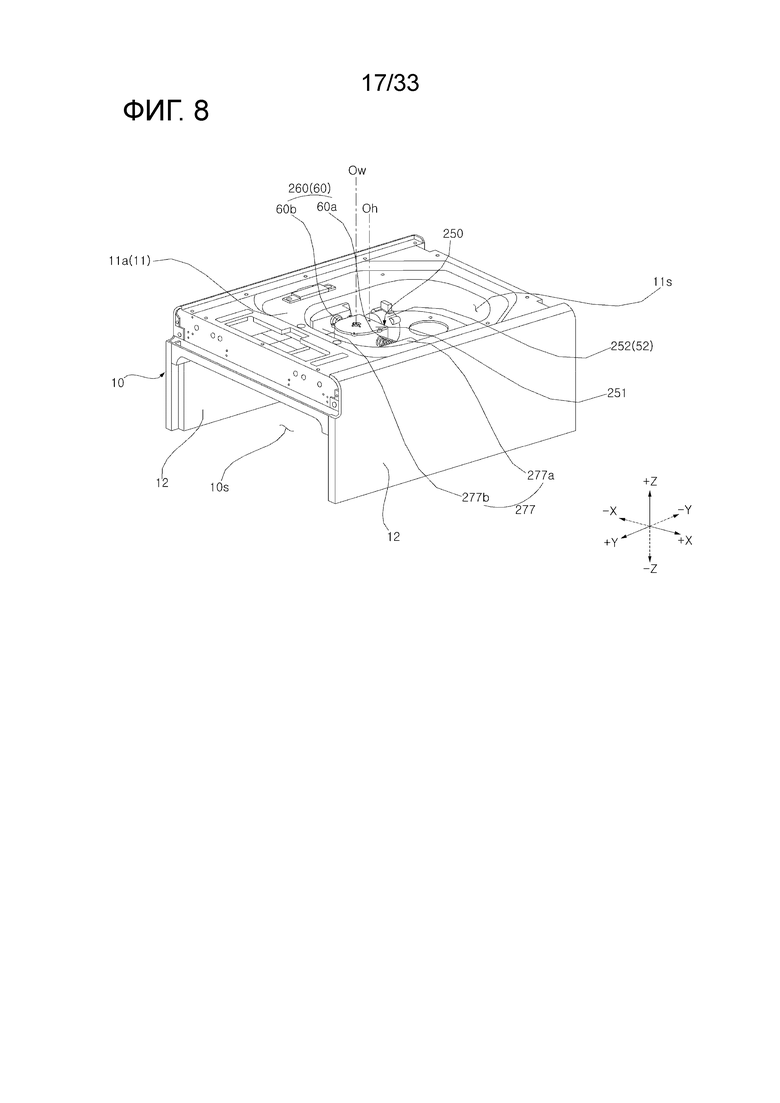


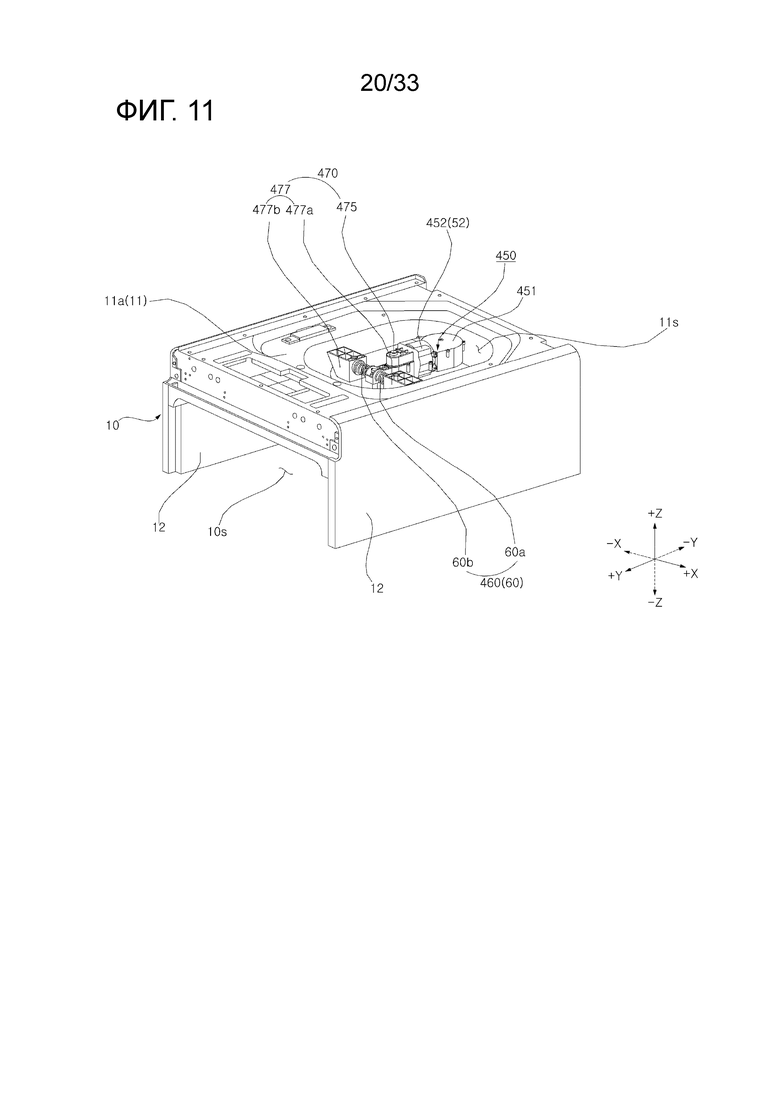



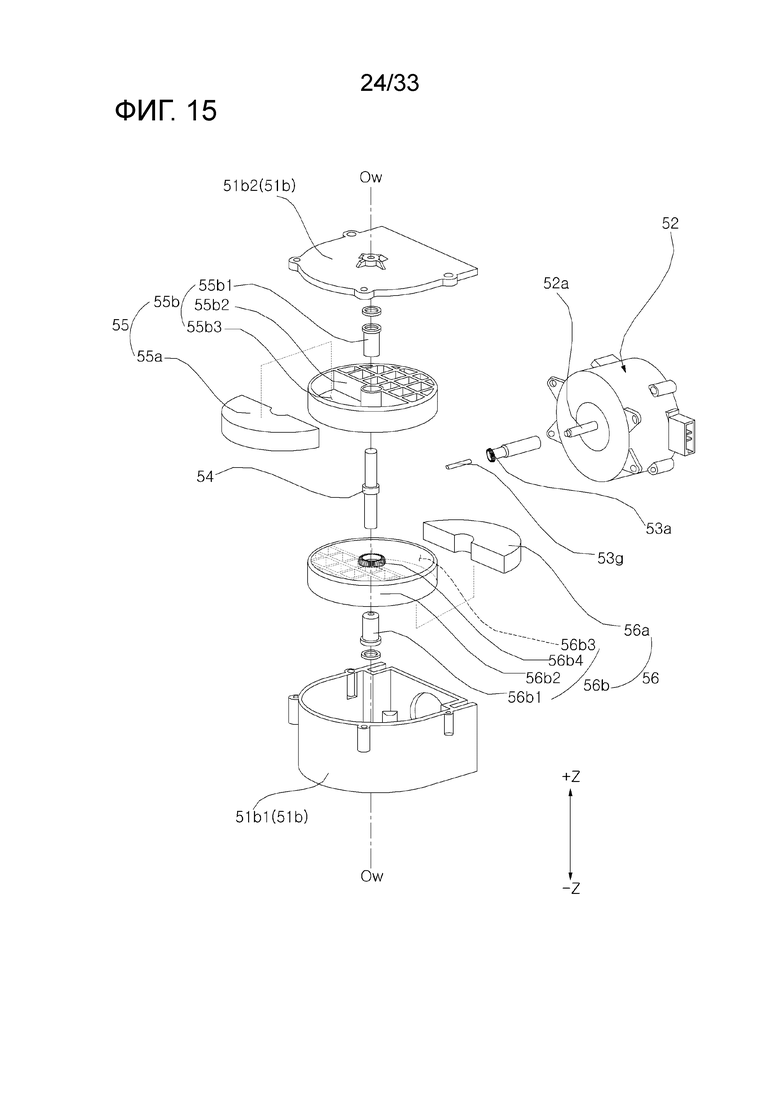



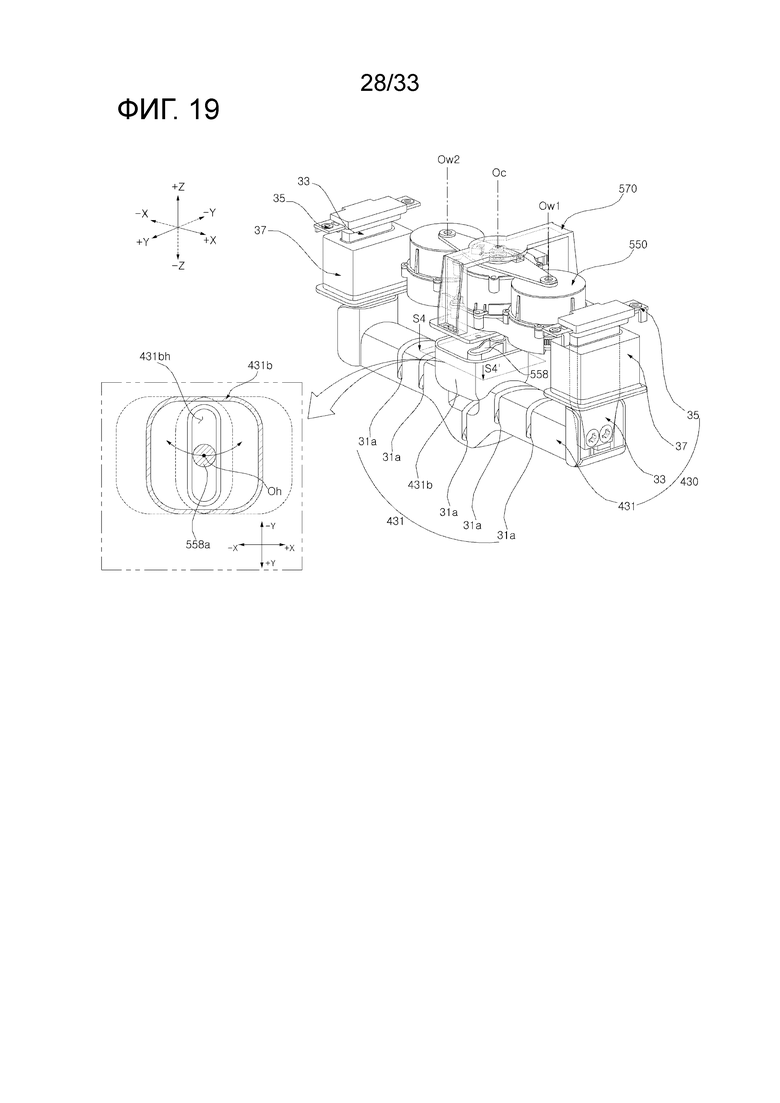
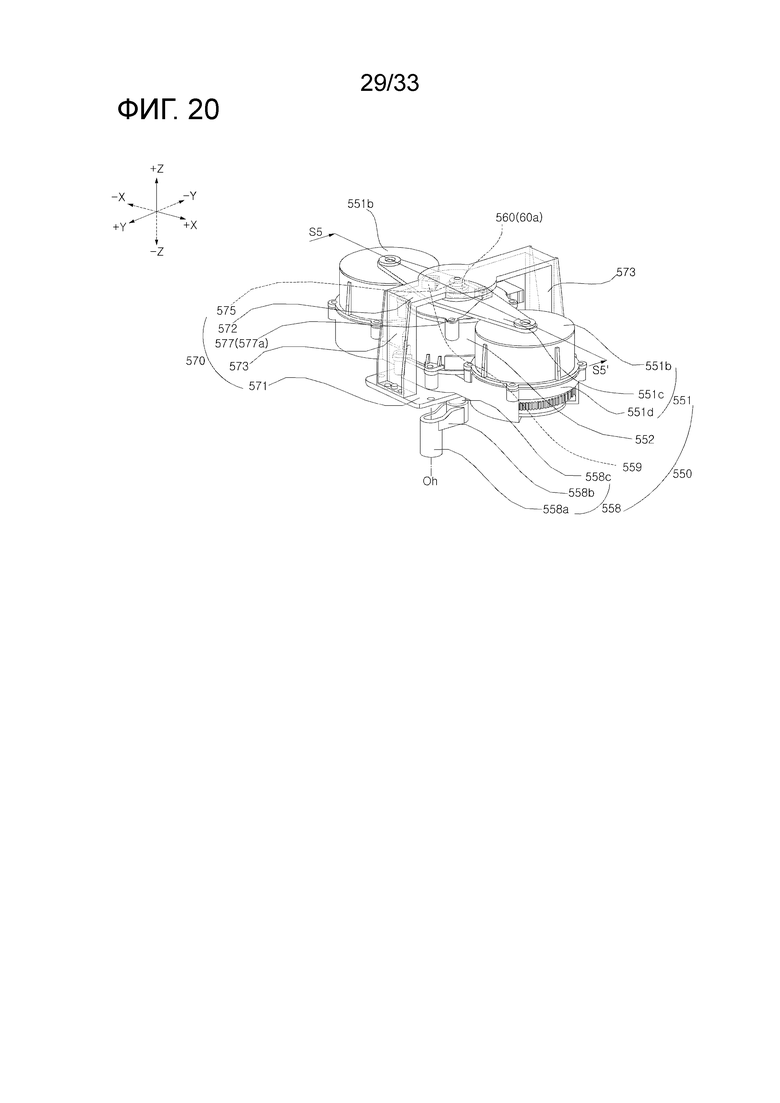

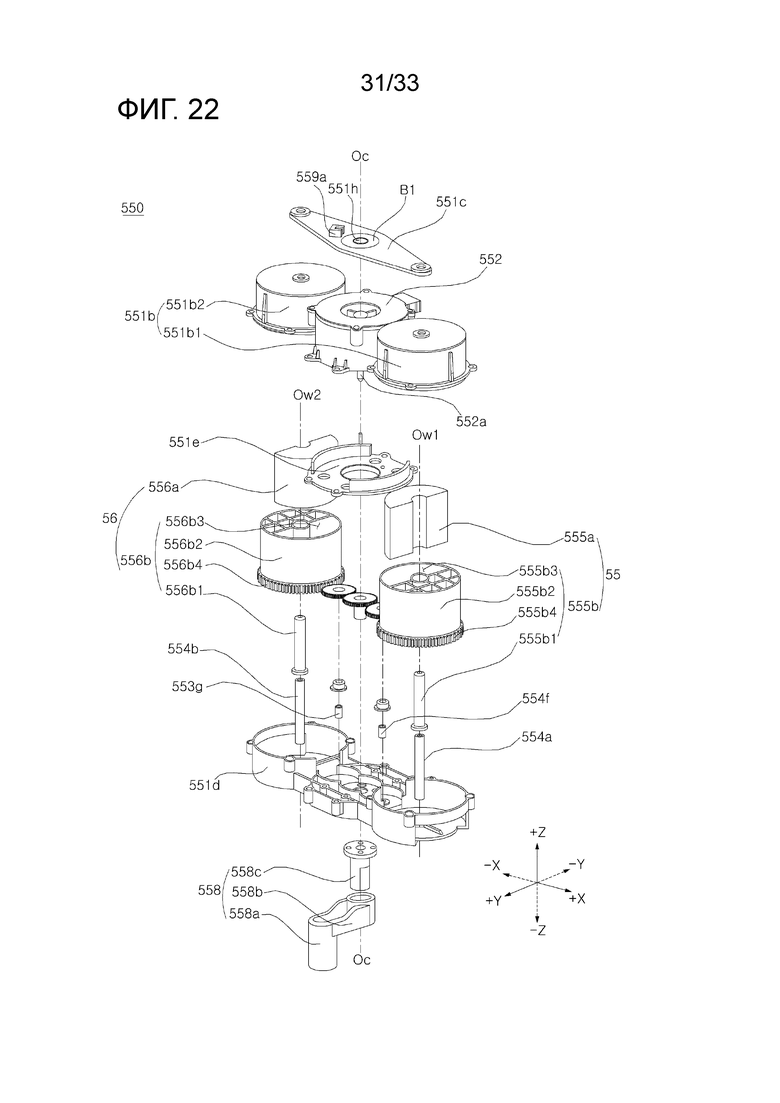


Устройство для обработки белья содержит каркас; основную часть вешалки, выполненную с возможностью движения относительно каркаса и предназначенную для подвешивания белья или вешалок для белья; вибратор, генерирующий колебания благодаря наличию по меньшей мере одного эксцентрика, который вращается вокруг по меньшей мере одной заданной оси вращения так, чтобы груз был смещен от центра, и который соединен с основной частью вешалки для передачи колебаний; и по меньшей мере один упругий элемент, который прилагает упругую силу к вибратору, когда вибратор совершает колебания, при этом угловая скорость эксцентрика является изменяемой. 19 з.п. ф-лы, 24 ил.
1. Устройство для обработки белья, содержащее:
каркас;
основную часть вешалки, выполненную с возможностью двигаться относительно каркаса и предназначенную для подвешивания белья или вешалок для белья;
вибратор, генерирующий колебания путем наличия по меньшей мере одного эксцентрика, который вращается вокруг по меньшей мере одной заданной оси вращения так, чтобы груз был смещен от центра, и соединенный с основной частью вешалки для передачи колебаний; и
по меньше мере один упругий элемент, прилагающий упругую силу к вибратору, когда вибратор совершает колебания,
при этом угловая скорость эксцентрика является изменяемой.
2. Устройство для обработки белья по п. 1, в котором две или более разные угловые скорости поддерживаются в течение заданного времени или дольше.
3. Устройство для обработки белья по п. 1, при этом устройство для обработки белья выполнено с возможностью работать в первом режиме, в котором частота  колебаний основной части вешалки относительно низка, а амплитуда относительно велика, и во втором режиме, в котором частота
колебаний основной части вешалки относительно низка, а амплитуда относительно велика, и во втором режиме, в котором частота  колебаний основной части вешалки относительно высока, а амплитуда относительно мала, за счет изменения угловой скорости и управления ею.
колебаний основной части вешалки относительно высока, а амплитуда относительно мала, за счет изменения угловой скорости и управления ею.
4. Устройство для обработки белья по п. 3, в котором частота колебаний для первого режима задана более близкой к собственной частоте  колебаний, чем частота
колебаний, чем частота  колебаний для второго режима.
колебаний для второго режима.
5. Устройство для обработки белья по п. 1, в котором амплитуда колебаний основной части вешалки в установившемся состоянии задана такой, чтобы иметь пиковую величину, когда угловая скорость имеет определенную величину больше нуля.
6. Устройство для обработки белья по п. 1, в котором один конец упругого элемента прикреплен к вибратору, и устройство для обработки белья далее содержит поддерживающий элемент, прикрепленный к каркасу, к которому прикреплен другой конец упругого элемента.
7. Устройство для обработки белья по п. 1, в котором упомянутый по меньшей мере один упругий элемент содержит:
первый упругий элемент, который упруго деформируется, когда вибратор движется в одну сторону в направлении колебаний, и
второй упругий элемент, который упруго деформируется, когда вибратор движется в другую сторону.
8. Устройство для обработки белья по п. 1, в котором упомянутый по меньшей мере один эксцентрик содержит:
первый эксцентрик, который вращается вокруг заданной первой оси вращения так, чтобы груз был смещен от центра; и
второй эксцентрик, который вращается вокруг заданной второй оси вращения, которая совпадает с первой осью вращения или параллельна ей, так, чтобы груз был смещен от центра.
9. Устройство для обработки белья по п. 8, в котором вибратор сконфигурирован так, чтобы вращаться вокруг заданной центральной оси, где положение относительно каркаса фиксировано, и при этом первая ось вращения и вторая ось вращения разнесены друг от друга в противоположных направлениях относительно центральной оси.
10. Устройство для обработки белья по п. 1, в котором основная часть вешалки выполнена с возможностью двигаться относительно каркаса в заданном направлении колебаний (+X, -X), и упругий элемент выполнен с возможностью упруго деформироваться или восстанавливать упругость, когда основная часть вешалки движется в направлении колебаний (+X, -X).
11. Устройство для обработки белья по п. 1, в котором вибратор выполнен с возможностью совершать линейные возвратно-поступательные движения в заданном направлении колебаний (+X, -X), а упругий элемент выполнен с возможностью упруго деформироваться или восстанавливать упругость, когда вибратор совершает линейные возвратно-поступательные движения.
12. Устройство для обработки белья по п. 11, при этом устройство для обработки белья выполнено с возможностью работать в первом режиме, в котором частота колебаний основной части вешалки относительно низка, а амплитуда относительно велика, и во втором режиме, в котором частота колебаний основной части вешалки относительно высока, а амплитуда относительно мала, за счет изменения угловой скорости и управления ею, при этом частота колебаний для первого режима задана более близкой к  , чем частота колебаний для второго режима,
, чем частота колебаний для второго режима,
где M - масса вибратора и основной части вешалки, а k - модуль упругости при сжатии или растяжении упругого элемента в направлении колебаний (+X, -X).
13. Устройство для обработки белья по п. 12, в котором амплитуда колебаний основной части вешалки в установившемся состоянии задана так, чтобы иметь пиковую величину, когда угловая скорость имеет конкретную величину больше нуля.
14. Устройство для обработки белья по п. 11, в котором упругий элемент содержит пружину, работающую на сжатие или растяжение.
15. Устройство для обработки белья по п. 1, в котором вибратор выполнен с возможностью вращаться и совершать возвратно-поступательные движения вокруг заданной центральной оси, где положение относительно каркаса фиксировано, при этом ось вращения и центральная ось разнесены и параллельны друг другу, основная часть вешалки и вибратор соединены на заданной соединительной оси, отнесенной от центральной оси, и упругий элемент выполнен с возможностью упруго деформироваться или восстанавливать упругость, когда вибратор вращается и совершает возвратно-поступательные движения.
16. Устройство для обработки белья по п. 15, при этом устройство для обработки белья выполнено с возможностью работать в первом режиме, в котором частота колебаний основной части вешалки относительно низка, а амплитуда относительно велика, и во втором режиме, в котором частота колебаний основной части вешалки относительно высока, а амплитуда относительно мала, за счет изменения угловой скорости и управления ею,
причем частота колебаний для первого режима задана более близкой к  или
или  , чем частота колебаний для второго режима,
, чем частота колебаний для второго режима,
где I - момент инерции вибратора вокруг центральной оси, M - масса основной части вешалки, B - расстояние между центральной осью и соединительной осью, и k - модуль упругости при сжатии или растяжении упругого элемента в направлении колебаний (+X, -X), и k - модуль упругости при кручении упругого элемента относительно угла θ вращения.
17. Устройство для обработки белья по п. 16, в котором амплитуда колебаний основной части вешалки в установившемся состоянии заранее задана так, чтобы иметь максимальную величину, когда угловая скорость имеет конкретную величину больше нуля.
18. Устройство для обработки белья по п. 15, в котором расстояние между центральной осью и осью вращения больше, чем расстояние между центральной осью и соединительной осью.
19. Устройство для обработки белья по п. 18, в котором отношение A/B расстояния между центральной осью и осью вращения к расстоянию B между центральной осью и соединительной осью равно или больше 2,6.
20. Устройство для обработки белья по п. 15, в котором упругий элемент содержит торсионную пружину.
| US 20060037209 A1, 23.02.2006 | |||
| US 2003223309 A1, 04.12.2003 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Устройство для сушки текстильных изделий | 1987 |
|
SU1442582A1 |

