Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления и к устройству управления для транспортного средства, которые управляют движением транспортного средства-носителя и представлением информации.
Уровень техники
[0002] В настоящее время известно устройство выдачи уведомлений для управления движением в режиме следования для следования за движущимся впереди транспортным средством (например, патентный документ 1: JP2001-209900A). Устройство выдачи уведомлений используется для управления транспортным средством-носителем таким образом, чтобы выполнять остановку, когда движущееся впереди транспортное средство выполняет остановку. После этого, когда движущееся впереди транспортное средство начинает движение, и расстояние между движущимся впереди транспортным средством и транспортным средством-носителем становится определенным расстоянием или больше, устройство выдачи уведомлений уведомляет в отношении того, что движущееся впереди транспортное средство начинает движение.
Документы уровня техники
Патентные документы
[0003] Патентный документ 1. JP2001-209900A
Раскрытие изобретения
Задачи, решаемые изобретением
[0004] Тем не менее, если начало движения движущегося впереди транспортного средства уведомляется после того, как расстояние между движущимся впереди транспортным средством и транспортным средством-носителем становится определенным расстоянием или больше, будет возникать запаздывание во времени от момента, когда движущееся впереди транспортное средство начинает движение, до момента, когда транспортное средство-носитель начинает движение. Следовательно, возникает проблема в том, что транспортное средство-носитель задерживается относительно движущегося впереди транспортного средства, когда транспортное средство-носитель начинает движение, по сравнению со случаем, в котором водитель сам осуществляет управление рассматриваемого транспортного средство, и транспортное средство-носитель не может надлежащим образом следовать за движущимся впереди транспортным средством.
[0005] Задача, которая должна решаться посредством настоящего изобретения, состоит в создании способа управления и устройства управления для транспортного средства, которые позволяют транспортному средству-носителю начинать движение в надлежащее время во время автоматизированного/автономного управления движением, при котором транспортное средство-носитель управляется таким образом, чтобы выполнять остановку независимо от операции нажатия педали тормоза, выполняемой водителем.
[0005] Средство решения задач
[0006] Настоящее изобретение решает вышеуказанную задачу посредством представления информации команды начала движения до того, как движущееся впереди транспортное средство начнет движение, при обнаружении остановки движущегося впереди транспортного средства во время выполнения автоматизированного/автономного управления движением, при котором транспортное средство-носитель управляется таким образом, чтобы выполнять остановку независимо от операции торможения, выполняемой водителем.
Преимущества изобретения
[0007] Согласно настоящему изобретению, когда остановка движущегося впереди транспортного средства обнаруживается во время выполнения автоматизированного/автономного управления движением, при котором транспортное средство-носитель управляется таким образом, чтобы выполнять остановку независимо от операции торможения, выполняемой водителем, представляется информация команды начала движения, чтобы за счет этого позволить водителю командовать транспортному средству-носителю начать движение в требуемое время после того, как движущееся впереди транспортное средство выполнило остановку. В силу этого транспортное средство-носитель может управляться таким образом, чтобы начать движение в надлежащее время даже во время автоматизированного/автономного управления движением, как и в случае ручного управления, выполняемого водителем.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей устройство управления для транспортного средства согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 2 является схемой, иллюстрирующей пример устройства ввода по фиг. 1.
Фиг. 3 является набором схем, иллюстрирующих примеры экранов, отображаемых на экране дисплея в одном или более вариантов осуществления настоящего изобретения.
Фиг. 4 является блок-схемой, иллюстрирующей процесс управления для транспортного средства согласно одному или более вариантов осуществления настоящего изобретения.
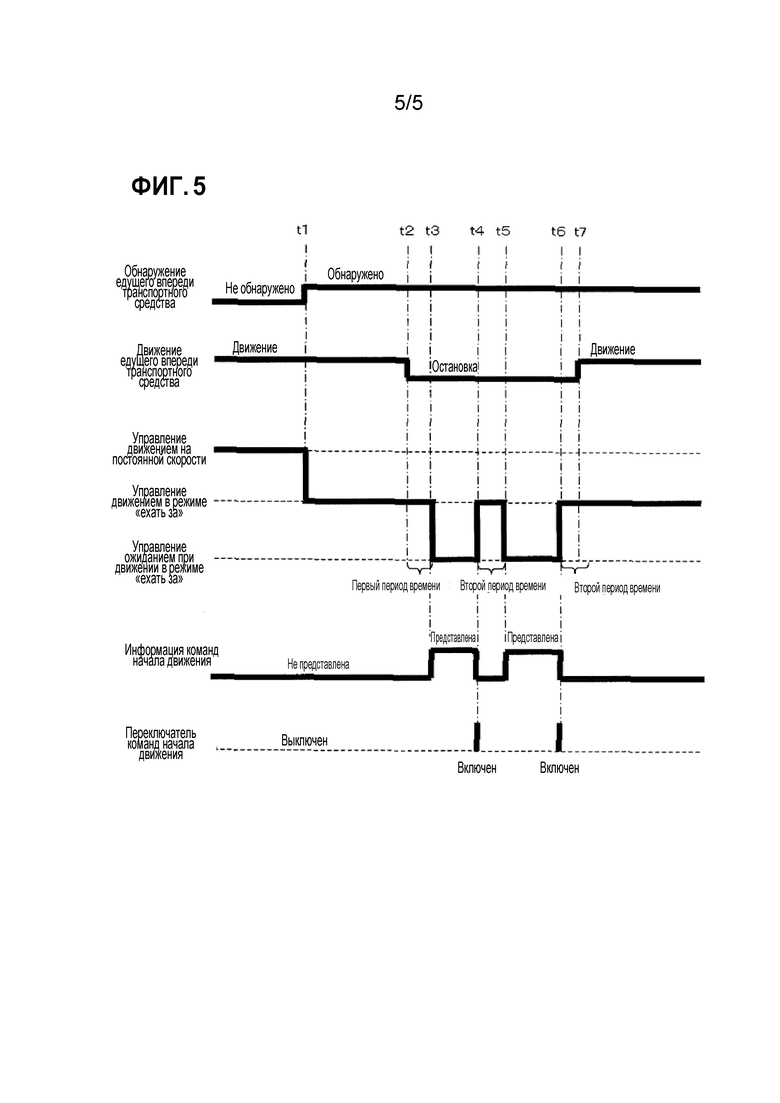
Фиг. 5 является схемой для описания процесса управления для транспортного средства согласно одному или более вариантам осуществления настоящего изобретения.
Осуществление изобретения
[0009] Ниже описаны один или более вариантов осуществления настоящего изобретения со ссылками на чертежи. В вариантах осуществления, в качестве примера проиллюстрировано и описано устройство управления для транспортного средства, установленное в транспортном средстве.
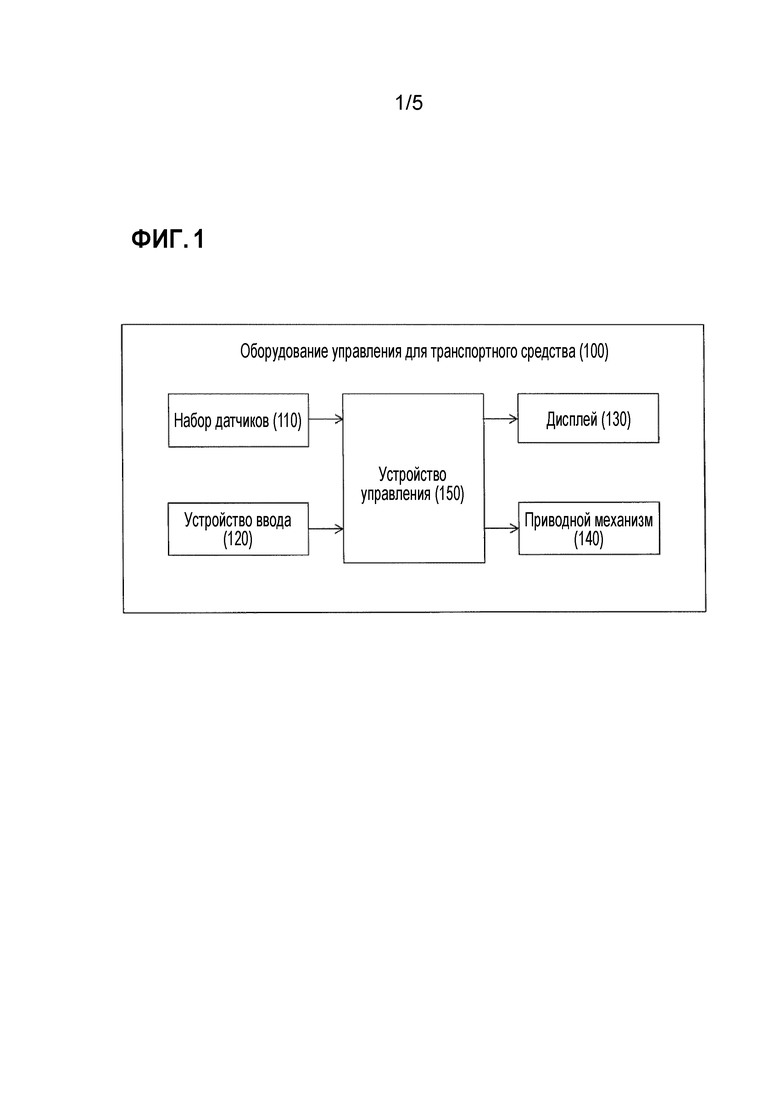
[0010] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 100 управления для транспортного средства согласно одному или более вариантам осуществления настоящего изобретения. Как проиллюстрировано на фиг. 1, устройство 100 управления для транспортного средства включает в себя набор 110 датчиков, устройство 120 ввода, дисплей 130, приводной механизм 140 и устройство 150 управления. Эти устройства соединены друг с другом через контроллерную сеть (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0011] Набор 110 датчиков состоит из GPS-устройства, которое обнаруживает положение транспортного средства-носителя, датчика скорости транспортного средства, который определяет скорость транспортного средства для транспортного средства-носителя, датчика угла поворота при рулении, который определяет угол поворота при рулении транспортного средства-носителя, датчика дальности, который обнаруживает помеху рядом с транспортным средством-носителем и полосу движения, в которой движется транспортное средство-носитель, камеры, которая захватывает изображение рядом с транспортным средством-носителем, и других необходимых компонентов. Примеры датчика дальности включают в себя лазерный радар, ультразвуковой датчик, звуковой волновой датчик и инфракрасный датчик.
[0012] Устройство 120 ввода представляет собой устройство, которым водитель может управлять, и включает в себя, например, различные переключатели для водителя, чтобы выполнять операции, связанные с автоматизированным/автономным управлением движением. Ниже описаны подробности переключателей, связанных с автоматизированным/автономным управлением движением, включенным в устройство 120 ввода.
[0013] Дисплей 130 представляет различные отображаемые информационные элементы, которые представляют состояние движения транспортного средства-носителя, на экране дисплея 130. Примеры такого дисплея 130 включают в себя дисплей навигационного устройства, дисплей на лобовом стекле, проецируемый на ветровое стекло, и дисплей, включенный в приборную панель.
[0014] Приводной механизм 140 включает в себя двигатель, тормоз, исполнительный механизм рулевого управления и другие необходимые компоненты для обеспечения возможности движения транспортного средства-носителя. При автоматизированном/автономном управлении движением, которое описано ниже, работа приводного механизма 140 управляется посредством устройства 150 управления.
[0015] Устройство 150 управления состоит из постоянного запоминающего устройства (ROM), которое сохраняет программы для управления движением транспортного средства-носителя, центрального процессора (CPU), который выполняет программы, сохраненные в ROM, и оперативного запоминающего устройства (RAM), которое служит в качестве доступного устройства хранения данных. В качестве замены или в дополнение к CPU, в качестве функциональной схемы также может использоваться микропроцессор (MPU), процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) и т.п..
[0016] Устройство 150 управления выполняет программы, сохраненные в ROM, с использованием CPU, чтобы за счет этого реализовать функцию обнаружения состояния движения для обнаружения состояния движения транспортного средства-носителя и функции управления движением для выполнения управления движением для транспортного средства-носителя. Ниже описаны эти функции устройства 150 управления.
[0017] Устройство 150 управления использует функцию обнаружения состояния движения для обнаружения состояния движения транспортного средства-носителя. Например, устройство 150 управления может использовать функцию обнаружения состояния движения для обнаружения положения, скорости движения и угла поворота при рулении транспортного средства-носителя в качестве состояния движения транспортного средства-носителя из GPS-устройства, датчика скорости транспортного средства и датчика угла поворота при рулении, включенных в набор 110 датчиков. Помимо этого или в качестве альтернативы, устройство 150 управления может использовать функцию обнаружения состояния движения для обнаружения разделительных линий полосы движения, в которой движется транспортное средство-носитель, в качестве состояния движения транспортного средства-носителя из датчика дальности и/или камеры, включенных в набор 110 датчиков. Помимо этого или в качестве альтернативы, устройство 150 управления может использовать функцию обнаружения состояния движения для того, чтобы обнаруживать присутствие или отсутствие движущегося впереди транспортного средства, движущегося впереди транспортного средства-носителя, в качестве состояния движения транспортного средства-носителя из датчика дальности и/или камеры, включенных в набор 110 датчиков. Помимо этого, когда такое движущееся впереди транспортное средство присутствует, устройство 150 управления может использовать функцию обнаружения состояния движения для определения расстояния от транспортного средства-носителя до движущегося впереди транспортного средства, скорости движения движущегося впереди транспортного средства и т.д. в качестве состояния движения транспортного средства-носителя из датчика дальности и/или камеры, включенных в набор 110 датчиков.
[0018] Устройство 150 управления использует функцию управления движением для выполнения автоматизированного/автономного управления движением для автоматического управления движением транспортного средства-носителя. Например, устройство 150 управления использует функцию управления движением для управления работой приводного механизма 140, такого как исполнительный механизм рулевого управления таким образом, что транспортное средство-носитель движется в полосе движения для транспортного средства-носителя, на основании разделительных линий полосы движения для транспортного средства-носителя, обнаруженных с использованием функции обнаружения состояния движения. Это позволяет устройству 150 управления выполнять управление удержанием на полосе движения для управления положением движения транспортного средства-носителя в направлении ширины дороги. Помимо этого, устройство 150 управления использует функцию управления движением для того, чтобы определять то, присутствует ли движущееся впереди транспортное средство, на основании результата обнаружения, полученного с использованием функции обнаружения состояния движения. После этого, когда движущееся впереди транспортное средство не присутствует, устройство 150 управления может использовать функцию управления движением для того, чтобы управлять работой приводного механизма 140, такого как двигатель и/или тормоз, чтобы за счет этого выполнять управление движением на постоянной скорости, при котором транспортное средство-носитель управляется таким образом, что оно движется на определенной скорости транспортного средства, которая задается водителем. С другой стороны, когда движущееся впереди транспортное средство присутствует, устройство 150 управления может использовать функцию управления движением для того, чтобы управлять работой приводного механизма 140, такого как двигатель и/или тормоз, чтобы за счет этого выполнять управление движением в режиме следования, при котором транспортное средство-носитель управляется таким образом, что оно движется таким образом, что оно движется за движущимся впереди транспортным средством с верхним пределом скорости транспортного средства, который задается водителем. В одном или более вариантов осуществления настоящего изобретения, управление удержанием на полосе движения, управление движением в режиме следования и управление движением на постоянной скорости совместно называются автоматизированным/автономным управлением движением.
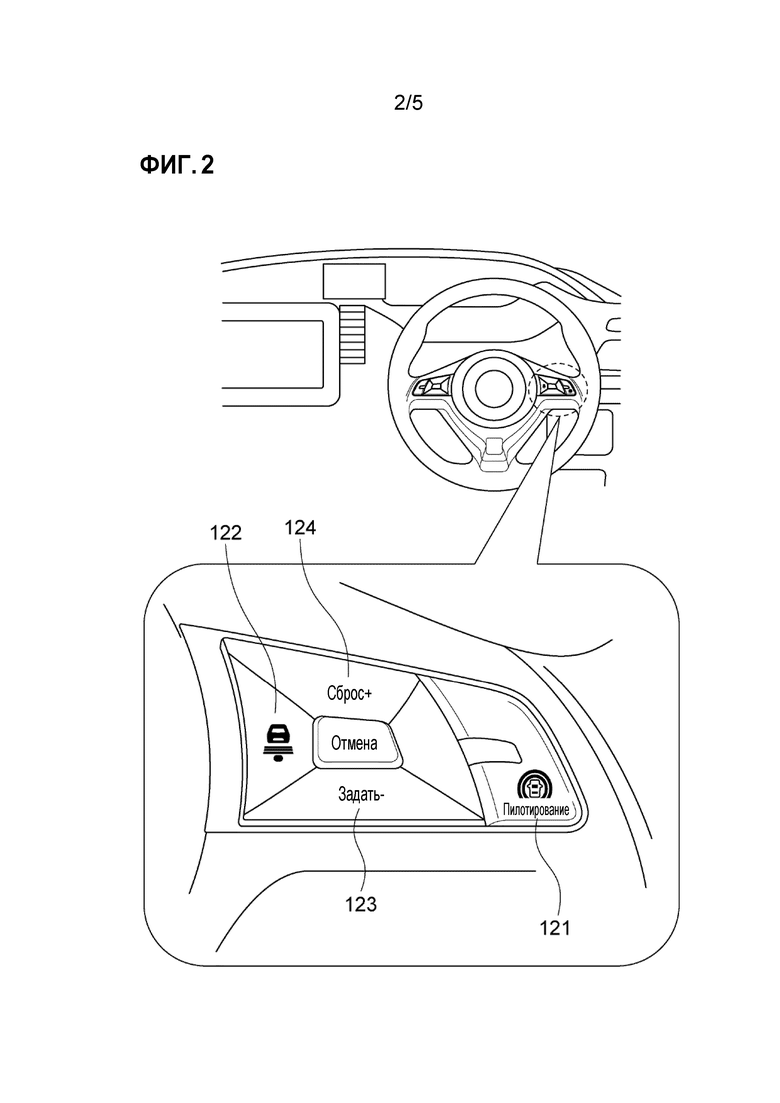
[0019] Фиг. 2 является схемой, иллюстрирующей пример устройства 120 ввода, связанного с автоматизированным/автономным управлением движением (управлением удержанием на полосе движения, управлением движением в режиме следования и управлением движением на постоянной скорости). В одном или более вариантов осуществления настоящего изобретения, устройство 120 ввода включает в себя переключатель 121 автоматизированного/автономного управления движением для выдачи команды включения/выключения автоматизированного/автономного управления движением, переключатель 122 задания расстояния между транспортными средствами для задания заданного расстояния между транспортными средствами при управлении движением в режиме следования, переключателе 123 задания скорости для задания заданной скорости транспортного средства при управлении движением в режиме следования и при управлении движением на постоянной скорости и переключатель 124 команды начала движения для выдачи команды транспортному средству-носителю начать движение, когда транспортное средство-носитель остановлено при управлении движением в режиме следования.
[0020] В одном или более вариантов осуществления настоящего изобретения, водитель включает переключатель 121 автоматизированного/автономного управления движением устройства 120 ввода таким образом, что устройство 150 управления использует функцию управления движением для того, чтобы начинать автоматизированное/автономное управление движением, которое включает в себя управление удержанием на полосе движения, управление движением в режиме следования и управление движением на постоянной скорости. Помимо этого, водитель может нажимать переключатель 122 задания расстояния между транспортными средствами устройства 120 ввода, чтобы за счет этого позволить устройству 150 управления задавать заданное расстояние между транспортными средствами (например, три стадии из небольшого, среднего и большого) при управлении движением в режиме следования таким образом, что функция управления движением служит для того, чтобы выполнять управление движением в режиме следования таким образом, что оно движется за движущимся впереди транспортным средством на заданном расстоянии между транспортными средствами, которое задается водителем. Кроме того, водитель может нажимать переключатель 123 задания скорости устройства 120 ввода, чтобы за счет этого позволить устройству 150 управления задавать заданную скорость транспортного средства при управлении движением в режиме следования и при управлении движением на постоянной скорости. Таким образом, устройство 150 управления может использовать функцию управления движением для того, чтобы выполнять управление движением в режиме следования, при котором транспортное средство-носитель управляется таким образом, что оно движется за движущимся впереди транспортным средством с верхним пределом заданной скорости транспортного средства, который задается водителем. Помимо этого, устройство 150 управления может использовать функцию управления движением для того, чтобы выполнять управление движением на постоянной скорости таким образом, что транспортное средство-носитель движется на заданной скорости транспортного средства, которая задается водителем.
[0021] В одном или более вариантов осуществления настоящего изобретения, когда движущееся впереди транспортное средство выполняет остановку во время управления движением в режиме следования, устройство 150 управления использует функцию управления движением для того, чтобы выполнять процесс, в котором транспортное средство-носитель управляется таким образом, чтобы выполнять остановку в ответ на остановку движущегося впереди транспортного средства. Затем устройство 150 управления использует функцию управления движением для того, чтобы определять то, остановлено ли транспортное средство-носитель, и то, находится ли транспортное средство-носитель в состоянии, в котором транспортное средство-носитель может начать движение. Когда транспортное средство-носитель остановлено, и транспортное средство-носитель находится в состоянии, в котором транспортное средство-носитель может начать движение, управление движением в режиме следования отменяется, и вместо этого, управление ожиданием при движении в режиме следования выполняется для того, чтобы управлять транспортным средством-носителем таким образом, чтобы выполнять остановку до тех пор, пока водитель не выдаст команду начала движения. Нижеприведенное описание направлено на способ определения того, остановлено ли транспортное средство-носитель, способ определения того, находится ли транспортное средство-носитель в состоянии, в котором транспортное средство-носитель может начать движение, и управление ожиданием при движении в режиме следования для управления транспортным средством-носителем таким образом, чтобы выполнять остановку до тех пор, пока водитель не выдаст команду начала движения.
[0022] В одном или более вариантов осуществления настоящего изобретения, с учетом ошибки определения датчика скорости транспортного средства, когда заданный первый период времени (например, несколько секунд) истекает после того, как скорость движения транспортного средства-носителя, определенная посредством датчика скорости транспортного средства, становится нулевой, устройство 150 управления использует функцию управления движением для того, чтобы определять то, что транспортное средство-носитель остановлено. Способ определения того, остановлено ли транспортное средство-носитель, не ограничен вышеописанным способом, и также может использоваться другой способ, в котором, например, когда скорость движения транспортного средства-носителя, определенная посредством датчика скорости транспортного средства, становится нулевой, выполняется определение в отношении того, что транспортное средство-носитель остановлено. До тех пор, пока первый период времени не истечет после того, как скорость транспортного средства для транспортного средства-носителя становится нулевой, управление движением в режиме следования продолжает выполняться. Соответственно, когда движущееся впереди транспортное средство начинает движение снова до того, как первый период времени истекает после того, как скорость транспортного средства для транспортного средства-носителя становится нулевой, транспортное средство-носитель управляется таким образом, чтобы автоматически начинать движение снова в ответ на начало движения движущегося впереди транспортного средства.
[0023] В одном или более вариантов осуществления настоящего изобретения, когда транспортное средство-носитель удовлетворяет всем заданным условиям возможности начала движения, устройство 150 управления использует функцию управления движением для того, чтобы определять то, что транспортное средство-носитель находится в состоянии, в котором транспортное средство-носитель может начать движение. В частности, в одном или более вариантов осуществления настоящего изобретения, когда следующие три условия возможности начала движения удовлетворяются, устройство 150 управления использует функцию управления движением для того, чтобы определять то, что транспортное средство-носитель находится в состоянии, в котором транспортное средство-носитель может начать движение. Три условия возможности начала движения при использовании в данном документе представляют собой то, что (1) водитель не нажимает педаль тормоза, (2), угол поворота при рулении для руления не составляет заданное значение или более, и (3) сообщение уведомления, которое уведомляет в отношении того, что автоматизированное/автономное управление движением (управление удержанием на полосе движения, управление движением в режиме следования и управление движением на постоянной скорости) не может выполняться, не отображается. Сообщение уведомления, которое уведомляет в отношении того, что автоматизированное/автономное управление движением не может выполняться, означает сообщение и т.п., выдаваемое в конкретном случае. Например, когда транспортное средство-носитель управляется таким образом, чтобы выполнять остановку во время управления движением в режиме следования, водитель может непреднамеренно нажимать педаль тормоза. В таком случае, водитель уведомляется в виде сообщения, что движение посредством автоматизированного/автономного управления движением не может выполняться, поскольку водитель нажимает педаль тормоза. Устройство 150 управления может использовать функцию управления движением для того, чтобы определять то, удовлетворяет ли транспортное средство-носитель вышеуказанным условиям возможности начала движения, на основании состояния движения и т.п. транспортного средства-носителя, обнаруженного с использованием функции обнаружения состояния движения.
[0024] Затем, когда выполняется определение в отношении того, что транспортное средство-носитель остановлено, и транспортное средство-носитель находится в состоянии, в котором транспортное средство-носитель может начать движение, устройство 150 управления использует функцию управления движением для того, чтобы отменять управление движением в режиме следования для следования за движущимся впереди транспортным средством и начинать управление ожиданием при движении в режиме следования для управления транспортным средством-носителем таким образом, чтобы прекращать движение до тех пор, пока водитель не выдаст команду начала движения. В частности, устройство 150 управления использует функцию управления движением для того, чтобы выполнять управление ожиданием при движении в режиме следования, при котором дисплей 130 управляется таким образом, чтобы отображать на своем экране информацию команды начала движения, которая напоминает водителю в отношении команды начала движения для транспортного средства-носителя.
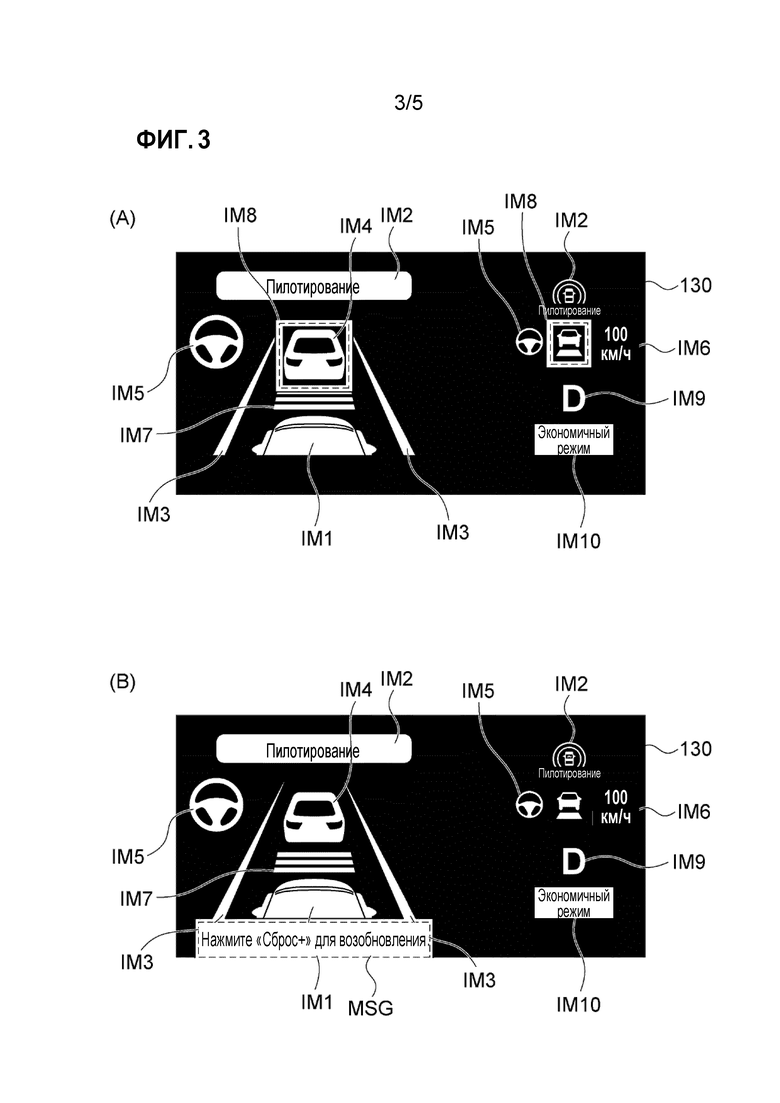
[0025] Фиг. 3 является набором схем, иллюстрирующих примеры экранов, отображаемых на экране дисплея 130. Например, когда устройство 150 управления использует функцию управления движением для того, чтобы выполнять автоматизированное/автономное управление движением (любое управление из управления удержанием на полосе движения, управления движением в режиме следования и управления движением на постоянной скорости), устройство 150 управления может управлять дисплеем 130 таким образом, чтобы отображать, как проиллюстрировано на фиг. 3(A), изображение IM1, которое указывает транспортное средство-носитель, и изображения IM2, которые указывают то, что автоматизированное/автономное управление движением выполняется. Помимо этого или в качестве альтернативы, при обнаружении разделительных линий полосы движения для транспортного средства-носителя, устройство 150 управления может использовать функцию управления движением для того, чтобы управлять дисплеем 130 таким образом, чтобы отображать изображения IM3, которые указывают разделительные линии полосы движения для транспортного средства-носителя. Помимо этого или в качестве альтернативы, при обнаружении движущегося впереди транспортного средства, устройство 150 управления может использовать функцию управления движением для того, чтобы управлять дисплеем 130 таким образом, чтобы отображать изображение IM4, которое указывает движущееся впереди транспортное средство.
[0026] Когда транспортное средство-носитель выполняет управление рулением посредством управления удержанием на полосе движения, устройство 150 управления может использовать функцию управления движением для того, чтобы управлять дисплеем 130 таким образом, чтобы отображать, как проиллюстрировано на фиг. 3(A), изображение IM5, которое указывает то, что управление рулением выполняется. Помимо этого или в качестве альтернативы, устройство 150 управления может использовать функцию управления движением для того, чтобы управлять дисплеем 130 таким образом, чтобы отображать изображение IM6, которое указывает заданную скорость транспортного средства, которая задается водителем, и/или изображение IM7, которое указывает заданное расстояние между транспортными средствами, которое задается водителем. Помимо этого или в качестве альтернативы, когда устройство 150 управления использует функцию управления движением для того, чтобы выполнять управление движением в режиме следования, при котором транспортное средство-носитель управляется таким образом, что оно движется за движущимся впереди транспортным средством, устройство 150 управления может управлять дисплеем 130 таким образом, чтобы отображать линию IM8 рамки, которая окружает изображение движущегося впереди транспортного средства, которое представляет собой объект управления движением в режиме следования. Помимо этого или в качестве альтернативы, устройство 150 управления может использовать функцию управления движением для управления дисплеем 130 таким образом, чтобы отображать, как проиллюстрировано на фиг. 3(A), изображение IM9, которое указывает положение переключения передач транспортного средства-носителя, и/или изображение IM10, которое указывает режим движения транспортного средства-носителя.
[0027] В случае если транспортное средство-носитель выполняет управление движением в режиме следования, когда транспортное средство-носитель управляется таким образом, чтобы выполнять остановку в ответ на остановку движущегося впереди транспортного средства, и транспортное средство-носитель находится в состоянии, в котором транспортное средство-носитель может начать движение, устройство 150 управления может управлять дисплеем 130 таким образом, чтобы отображать, как проиллюстрировано на фиг. 3(B), информацию MSG команды начала движения, которая напоминает водителю в отношении команды начала движения для транспортного средства-носителя. Например, устройство 150 управления может использовать функцию управления движением для управления дисплеем 130 таким образом, чтобы отображать, как проиллюстрировано на фиг. 3(B), информацию команды начала движения, такую как «Нажмите «Сброс+» (переключатель 124 команды начала движения) для возобновления». После этого, в ответ на информацию команды начала движения, водитель включает переключатель 124 команды начала движения, проиллюстрированный на фиг. 2, чтобы за счет этого позволить переключателю 124 команды начала движения выводить сигнал, который указывает то, что переключатель 124 команды начала движения включается, в устройство 150 управления. После этого, когда устройство 150 управления принимает сигнал включения переключателя 124 команды начала движения, устройство 150 управления использует функцию управления движением для того, чтобы переключать управление с управления ожиданием при движении в режиме следования на управление движением в режиме следования, при котором работа приводного механизма 140, такого как двигатель и/или тормоз, управляется таким образом, чтобы позволить транспортному средству-носителю начать движение. Через эту операцию, когда транспортное средство-носитель управляется таким образом, чтобы выполнять остановку в ответ на остановку движущегося впереди транспортного средства при управлении движением в режиме следования, устройство 150 управления согласно одному или более вариантов осуществления настоящего изобретения может управлять транспортным средством-носителем таким образом, чтобы начать движение во время, требуемое водителем, при условии, что транспортное средство-носитель готово начать движение.
[0028] Когда водитель включает переключатель 124 команды начала движения, чтобы командовать транспортному средству-носителю начать движение, устройство 150 управления использует функцию управления движением для того, чтобы переключать управление с управления ожиданием при движении в режиме следования на управление движением в режиме следования, но в случае, если движущееся впереди транспортное средство по-прежнему находится в состоянии остановки, и транспортное средство-носитель не может начать движение, когда заданный второй период времени истекает после команды начала движения, выданной водителем, и транспортное средство-носитель находится в состоянии, в котором транспортное средство-носитель может начать движение, управление переключается снова с управления движением в режиме следования на управление ожиданием при движении в режиме следования, при котором дисплей 130 управляется таким образом, чтобы отображать информацию команды начала движения на экране дисплея 130. Таким образом, когда водитель включает переключатель 124 команды начала движения, чтобы командовать транспортному средству-носителю начать движение, но несмотря на это, транспортное средство-носитель не может начать движение, поскольку движущееся впереди транспортное средство остановлено, информация команды начала движения представляется снова водителю после того, как истекает второй период времени.
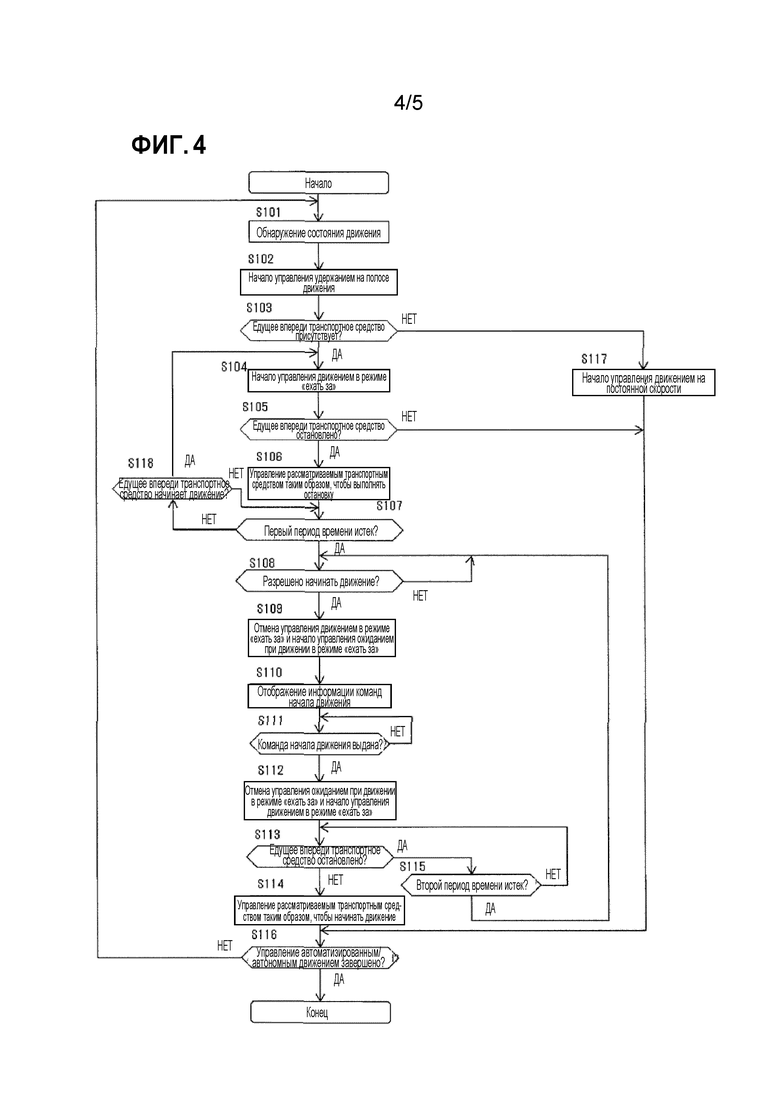
[0029] Ниже описан процесс управления движением согласно одному или более вариантов осуществления настоящего изобретения со ссылкой на фиг. 4. Фиг. 4 является блок-схемой, иллюстрирующей процесс управления движением, выполняемый посредством устройства 150 управления согласно одному или более вариантов осуществления настоящего изобретения. Процесс управления движением, который описан ниже, начинается, когда водитель включает переключатель 121 автоматизированного/автономного управления движением.
[0030] Во-первых, на этапе S101, устройство 150 управления использует функцию обнаружения состояния движения для того, чтобы обнаруживать состояние движения транспортного средства-носителя. Например, устройство 150 управления может использовать функцию обнаружения состояния движения для того, чтобы обнаруживать, в качестве состояния движения транспортного средства-носителя, информацию о положении транспортного средства-носителя из GPS-устройства, включенного в набор 110 датчиков, информацию о скорости транспортного средства для транспортного средства-носителя из датчика скорости транспортного средства, угол поворота при рулении транспортного средства-носителя из датчика угла поворота при рулении, информацию полос движения для полосы движения, в которой движется транспортное средство-носитель, из камеры, и информацию относительно присутствия или отсутствия движущегося впереди транспортного средства и положения и скорости движущегося впереди транспортного средства из датчика дальности и/или камеры. Также на следующих этапах после этапа S101, устройство 150 управления использует функцию обнаружения состояния движения для того, чтобы периодически обнаруживать различные информационные элементы, которые представляют состояние движения транспортного средства-носителя.
[0031] На этапе S102, устройство 150 управления использует функцию управления движением для того, чтобы начинать управление удержанием на полосе движения. Например, устройство 150 управления может использовать функцию управления движением для того, чтобы управлять работой приводного механизма 140, такого как исполнительный механизм рулевого управления на основании разделительных линий полосы движения для транспортного средства-носителя, которые обнаруживаются на этапе S101, чтобы за счет этого выполнять управление удержанием на полосе движения для управления положением движения транспортного средства-носителя в направлении ширины дороги.
[0032] На этапе S103, устройство 150 управления использует функцию управления движением для того, чтобы определять то, присутствует ли движущееся впереди транспортное средство, на основании результата обнаружения движущегося впереди транспортного средства, обнаруженного на этапе S101. Когда движущееся впереди транспортное средство присутствует, процесс переходит к этапу S104, на котором функция управления движением служит для того, чтобы начинать управление движением в режиме следования для управления транспортным средством-носителем таким образом, что оно движется за движущимся впереди транспортным средством на заданном расстоянии между транспортными средствами, которое задается водителем. С другой стороны, когда движущееся впереди транспортное средство не присутствует, процесс переходит к этапу S117, на котором функция управления движением служит для того, чтобы начинать управление движением на постоянной скорости для управления транспортным средством-носителем таким образом, что оно движется при заданной скорости транспортного средства, которая задается водителем.
[0033] После управления движением на постоянной скорости, выполняемого на этапе S117, выполняется этап S116, на котором выполняется определение в отношении того, завершается ли автоматизированное/автономное управление движением. Когда автоматизированное/автономное управление движением не завершается, процесс возвращается к этапу S101. После этого, когда движущееся впереди транспортное средство появляется (этап S103="Да"), управление движением в режиме следования начинается (этап S104), тогда как, когда движущееся впереди транспортное средство не появляется (этап S103="Нет"), управление движением на постоянной скорости продолжает выполняться (этап S117).
[0034] После того, как управление движением в режиме следования начинается на этапе S104, процесс переходит к этапу S105. На этапе S105, функция управления движением служит для того, чтобы определять то, остановлено ли движущееся впереди транспортное средство. Например, функция управления движением может служить для того, чтобы определять то, остановлено ли движущееся впереди транспортное средство, на основании положения и/или скорости движущегося впереди транспортного средства, обнаруженной на этапе S101. Когда выполняется определение в отношении того, что движущееся впереди транспортное средство остановлено, процесс переходит к этапу S106, тогда как, когда выполняется определение в отношении того, что движущееся впереди транспортное средство не остановлено, процесс переходит к этапу S116. После определения того, что движущееся впереди транспортное средство не остановлено, выполняется этап S116, на котором выполняется определение в отношении того, завершается ли автоматизированное/автономное управление движением. После этого, когда автоматизированное/автономное управление движением не завершается, процесс возвращается к этапу S101, чтобы продолжать управление движением в режиме следования (этап S104) при присутствии движущегося впереди транспортного средства (этап S103="Да"), и когда движущееся впереди транспортное средство более не присутствует (этап S103="Нет"), управление движением на постоянной скорости начинается (этап S117).
[0035] На этапе S106, функция управления движением служит для того, чтобы выполнять процесс управления транспортным средством-носителем таким образом, чтобы прекращать движение, поскольку выполняется определение в отношении того, что движущееся впереди транспортное средство остановлено во время управления движением в режиме следования. Например, устройство 150 управления может использовать функцию управления движением для того, чтобы управлять работой приводного механизма 140, такого как двигатель и/или тормоз, чтобы за счет этого управлять транспортным средством-носителем таким образом, чтобы прекращать движение.
[0036] На этапе S107, функция управления движением служит для того, чтобы определять то, истекает ли заданный первый период времени (например, несколько секунд) после того, как скорость транспортного средства становится нулевой. В одном или более вариантов осуществления настоящего изобретения, с учетом ошибки определения датчика скорости транспортного средства, когда первый период времени истекает после того, как скорость транспортного средства для транспортного средства-носителя становится нулевой вследствие процесса управления транспортным средством-носителем таким образом, чтобы прекращать движение на этапе S106, выполняется определение в отношении того, что транспортное средство-носитель остановлено. Соответственно до тех пор, пока первый период времени не истечет после того, как скорость транспортного средства становится нулевой, выполняется определение в отношении того, что транспортное средство-носитель не остановлено, и процесс ожидает на этапе S107, и когда первый период времени истекает после того, как скорость транспортного средства становится нулевой, выполняется определение в отношении того, что транспортное средство-носитель остановлено, и процесс переходит к этапу S108. До тех пор, пока первый период времени не истечет после того, как скорость транспортного средства для транспортного средства-носителя становится нулевой, управление движением в режиме следования продолжает выполняться. Соответственно, когда движущееся впереди транспортное средство, ранее остановленное, начинает движение, в то время как первый период времени истекает, транспортное средство-носитель управляется таким образом, чтобы начать движение даже без команды, выданной водителем (этап S107="Нет" --> этап S118="Да" --> этап S104).
[0037] На этапе S108, функция управления движением служит для того, чтобы определять то, находится ли транспортное средство-носитель в состоянии, в котором транспортное средство-носитель может начать движение. В одном или более вариантов осуществления настоящего изобретения, когда следующие три условия возможности начала движения удовлетворяются, например, функция управления движением служит для того, чтобы определять то, что транспортное средство-носитель находится в состоянии, в котором транспортное средство-носитель может начать движение. Три условия возможности начала движения при использовании в данном документе представляют собой то, что (1) водитель не нажимает педаль тормоза, (2), угол поворота при рулении для руления не составляет заданное значение или более, и (3) сообщение уведомления, которое уведомляет водителя в отношении того факта, что автоматизированное/автономное управление движением (управление удержанием на полосе движения, управление движением в режиме следования и управление движением на постоянной скорости) не может выполняться, не отображается. Когда транспортное средство-носитель не находится в состоянии, в котором транспортное средство-носитель может начать движение, процесс ожидает на этапе S108 до тех пор, пока транспортное средство-носитель не перейдет в состояние, в котором транспортное средство-носитель может начать движение, тогда как, когда транспортное средство-носитель находится в состоянии, в котором транспортное средство-носитель может начать движение, процесс переходит к этапу S109.
[0038] На этапе S109, функция управления движением служит для того, чтобы отменять управление движением в режиме следования и начинать управление ожиданием при движении в режиме следования. Управление движением в режиме следования отменяется, и управление ожиданием при движении в режиме следования начинается таким образом, что движение в режиме следования за движущимся впереди транспортное средство запрещается, и даже когда движущееся впереди транспортное средство начинает движение, транспортное средство-носитель остается остановленным до тех пор, пока водитель не выдаст команду. Затем устройство 150 управления использует функцию управления движением для того, чтобы выполнять процесс этапов S110 в S111 в качестве управления ожиданием при движении в режиме следования.
[0039] Это будет описано более подробно. На этапе S110, функция управления движением служит для того, чтобы отображать информацию команды начала движения. Например, устройство 150 управления может использовать функцию управления движением для того, чтобы управлять дисплеем 130 таким образом, чтобы отображать на его экране информацию команды начала движения, такую как «Нажмите «Сброс+» (переключатель 124 команды начала движения) для возобновления», как проиллюстрировано на фиг. 3(B). Затем на этапе S111, функция управления движением служит для определения того, командует ли водитель транспортному средству-носителю начать движение в ответ на информацию команды начала движения, отображаемую на этапе S110. Например, когда водитель включает переключатель 124 команды начала движения, функция управления движением может служить для того, чтобы определять что водитель командует транспортному средству-носителю начать движение. Когда водитель не командует транспортному средству-носителю начать движение, процесс ожидает на этапе S111 до тех пор, пока водитель не скомандует транспортному средству-носителю начать движение, и когда водитель командует транспортному средству-носителю начать движение, процесс переходит к этапу S112.
[0040] На этапе S112, функция управления движением служит для того, чтобы отменять управление ожиданием при движении в режиме следования и начинать управление движением в режиме следования. Затем на этапе S113, функция управления движением служит для того, чтобы определять то, остановлено ли движущееся впереди транспортное средство. Когда движущееся впереди транспортное средство остановлено даже после того, как водитель командует транспортному средству-носителю начать движение, и управление движением в режиме следования начинается, процесс переходит к этапу S115. На этапе S115, функция управления движением служит для того, чтобы определять то, истекает ли заданный второй период времени после того, как водитель командует транспортному средству-носителю начать движение. Второй период времени может быть идентичным или может не быть идентичным первому периоду времени. Затем, до тех пор, пока второй период времени не истечет после того, как водитель командует транспортному средству-носителю начать движение (этап S115="Нет"), процесс возвращается к этапу S113, от которого функция управления движением служит для того, чтобы многократно выполнять определение в отношении того, остановлено ли движущееся впереди транспортное средство (этап S113), и определение в отношении того, истекает ли второй период времени (этап S115). После этого, когда второй период времени истекает после того, как водитель командует транспортному средству-носителю начать движение, процесс возвращается к этапу S108, и когда транспортное средство-носитель находится в состоянии, в котором транспортное средство-носитель может начать движение (этап S108="Да"), информация команды начала движения отображается снова на дисплее 130 (этап S110).
[0041] Когда, на этапе S113, выполняется определение в отношении того, что движущееся впереди транспортное средство начинает движение до того, как второй период времени истекает после того, как водитель командует транспортному средству-носителю начать движение, процесс переходит к этапу S114, на котором функция управления движением служит для того, чтобы управлять транспортным средством-носителем таким образом, чтобы начать движение.
[0042] Затем на этапе S116, функция управления движением служит для того, чтобы определять то, завершается ли автоматизированное/автономное управление движением. Например, когда водитель выключает переключатель 121 автоматизированного/автономного управления движением, устройство 150 управления может использовать функцию управления движением для того, чтобы определять то, что автоматизированное/автономное управление движением завершается. Когда автоматизированное/автономное управление движением не завершается, процесс возвращается к этапу S101, от которого процесс управления движением по фиг. 4 продолжает выполняться. После этого, когда автоматизированное/автономное управление движением завершается, процесс управления движением по фиг. 4 заканчивается.
[0043] Со ссылкой на фиг. 5, ниже описан процесс управления движением согласно одному или более вариантов осуществления настоящего изобретения. Фиг. 5 является схемой для описания процесса управления движением согласно одному или более вариантов осуществления настоящего изобретения. Например, в примере, проиллюстрированном на фиг. 5, движущееся впереди транспортное средство не присутствует до времени t1 (этап S103="Нет"), и в силу этого устройство 150 управления использует функцию управления движением для того, чтобы выполнять управление движением на постоянной скорости (этап S117 --> этап S116 --> этап S101 --> этап S102 --> этап S103). После этого, когда движущееся впереди транспортное средство обнаруживается во время t1 (этап S103="Да"), устройство 150 управления использует функцию управления движением для того, чтобы выполнять управление движением в режиме следования (этап S104).
[0044] Дополнительно, в примере, проиллюстрированном на фиг. 5, в течение периода от времени t1 до времени t2, устройство 150 управления использует функцию управления движением для того, чтобы выполнять управление движением в режиме следования, при котором транспортное средство-носитель управляется таким образом, что оно движется с возможностью следования за движущимся впереди транспортным средством (этап S104 --> этап S105="Нет" --> этап S116 --> этап S101 --> этап S102 --> этап S103="Да" --> этап S104). После этого, когда движущееся впереди транспортное средство выполняет остановку во время t2 (этап S105="Да"), устройство 150 управления использует функцию управления движением для того, чтобы управлять транспортным средством-носителем таким образом, чтобы выполнять остановку в ответ на остановку движущегося впереди транспортного средства (этап S106). В одном или более вариантов осуществления настоящего изобретения, как проиллюстрировано на фиг. 5, управление движением в режиме следования продолжает выполняться до тех пор, пока заданный первый период времени не истечет после того, как транспортное средство-носитель управляется таким образом, чтобы выполнять остановку (после того, как скорость транспортного средства для транспортного средства-носителя становится нулевой). Соответственно, если движущееся впереди транспортное средство, ранее остановленное, начинает движение в течение периода от времени t2 до времени t3, транспортное средство-носитель управляется таким образом, чтобы автоматически начать движение даже без команды, выданной водителем.
[0045] Затем во время t3, когда первый период времени истекает после того, как скорость транспортного средства для транспортного средства-носителя становится нулевой (этап S107="Да"), и транспортное средство-носитель находится в состоянии, в котором транспортное средство-носитель может трогаться с места (этап S108="Да"), устройство 150 управления отменяет управление движением в режиме следования и начинает управление ожиданием при движении в режиме следования (этап S109). Через эту операцию, во время t3, устройство 150 управления выполняет процесс, в котором, как проиллюстрировано на фиг. 2(B), информация команды начала движения отображается на экране дисплея 130 (этап S110).
[0046] В примере, проиллюстрированном на фиг. 5, во время t4 в течение периода, в который информация команды начала движения отображается на экране дисплея 130 от времени t3, водитель нажимает переключатель 124 команды начала движения, чтобы за счет этого командовать транспортному средству-носителю начать движение (этап S111="Да") таким образом, что управление ожиданием при движении в режиме следования отменяется во время t4, чтобы возобновлять управление движением в режиме следования (этап S112). Тем не менее, в примере, проиллюстрированном на фиг. 5, движущееся впереди транспортное средство остается остановленным во время t4 (этап S113="Да"), и транспортное средство-носитель в силу этого управляется таким образом, чтобы ожидать при продолжении управления движением в режиме следования до тех пор, пока заданный второй период времени не истечет после того, как водитель командует транспортному средству-носителю начать движение (этап S115="Нет"). Затем во время t5, когда второй период времени истекает после того, как водитель командует транспортному средству-носителю начать движение (этап S115="Да"), и транспортное средство-носитель находится в состоянии, в котором транспортное средство-носитель может начать движение (этап S108="Да"), управление движением в режиме следования отменяется снова, чтобы начинать управление ожиданием при движении в режиме следования (этап S109), и информация команды начала движения отображается снова (этап S110).
[0047] В примере, проиллюстрированном на фиг. 5, когда, во время t6 в течение периода, в который информация команды начала движения отображается на экране дисплея 130 от времени t5, водитель в силу этого нажимает переключатель 124 команды начала движения снова, чтобы командовать транспортному средству-носителю начать движение (этап S111="Да"), управление ожиданием при движении в режиме следования отменяется, чтобы начинать управление движением в режиме следования (этап S112). Тем не менее, в примере, проиллюстрированном на фиг. 5, движущееся впереди транспортное средство еще не начинает движение во время t6 (этап S113="Да"), и транспортное средство-носитель в силу этого управляется таким образом, чтобы ожидать при продолжении управления движением в режиме следования, и выполняется определение в отношении того, истекает ли второй период времени (этап S115). В примере, проиллюстрированном на фиг. 5, движущееся впереди транспортное средство начинает движение во время t7 до того, как второй период времени истекает (этап S115="Нет", этап S113="Нет") таким образом, что устройство 150 управления выполняет управление движением в режиме следования, чтобы управлять транспортным средством-носителем таким образом, чтобы начать движение (этап S113). Таким образом, в одном или более вариантов осуществления настоящего изобретения, можно командовать транспортному средству-носителю начать движение до того, как движущееся впереди транспортное средство начинает движение, и когда движущееся впереди транспортное средство начинает движение до того, как второй период времени истекает после выдачи команды транспортному средству-носителю начать движение, транспортное средство-носитель может управляться таким образом, чтобы начать движение сразу после того, как движущееся впереди транспортное средство начинает движение.
[0048] Как описано выше, в одном или более вариантов осуществления настоящего изобретения, когда остановка движущегося впереди транспортного средства обнаруживается во время автоматизированного/автономного управления движением, при котором транспортное средство-носитель управляется таким образом, чтобы выполнять остановку независимо от операции торможения, выполняемой водителем, информация команды начала движения для напоминания водителю в отношении команды начала движения для транспортного средства-носителя представляется. Более конкретно, во время автоматизированного/автономного управления движением, при котором транспортное средство-носитель управляется таким образом, чтобы выполнять остановку независимо от операции торможения, выполняемой водителем, выполняется определение в отношении того, выполняет ли транспортное средство-носитель остановку, и информация команды начала движения, которая напоминает водителю в отношении команды начала движения для транспортного средства-носителя, представляется в то время, когда выполняется определение в отношении того, что транспортное средство-носитель выполняет остановку. Это позволяет водителю командовать транспортному средству-носителю начать движение в требуемое время после того, как транспортное средство-носитель выполняет остановку (например, до того, как движущееся впереди транспортное средство начинает движение, либо до того, как сигнал светофора изменяется на сигнал, который разрешает транспортному средству-носителю двигаться), даже когда транспортное средство-носитель выполняет остановку при автоматизированном/автономном управлении движением. В силу этого транспортное средство-носитель может управляться таким образом, чтобы начать движение в надлежащее время, в которое водитель хочет, как и в случае, в котором водитель выполняет управление вручную.
[0049] В одном или более вариантов осуществления настоящего изобретения, автоматизированное/автономное управление движением включает в себя управление движением в режиме следования, при котором транспортное средство-носитель управляется таким образом, что оно движется с возможностью следования за движущимся впереди транспортным средством, и когда транспортное средство-носитель управляется таким образом, чтобы выполнять остановку вследствие остановки движущегося впереди транспортного средства во время управления движением в режиме следования, информация команды начала движения представляется. Через эту операцию, даже когда транспортное средство-носитель управляется таким образом, чтобы выполнять остановку в ответ на остановку движущегося впереди транспортного средства при управлении движением в режиме следования, транспортное средство-носитель может управляться таким образом, чтобы начать движение во время, в которое водитель хочет, как и в случае, в котором водитель управляет транспортным средством-носителем таким образом, чтобы выполнять остановку в ответ на остановку движущегося впереди транспортного средства, и в силу этого транспортное средство-носитель может управляться таким образом, чтобы надлежащим образом следовать за движущимся впереди транспортным средством.
[0050] В одном или более вариантах осуществления настоящего изобретения, когда заданный первый период времени истекает после того, как скорость транспортного средства для транспортного средства-носителя становится нулевой, выполняется определение в отношении того, что транспортное средство-носитель остановлено, и информация команды начала движения представляется. Это позволяет надлежащим образом определять то, остановлено ли транспортное средство-носитель, даже когда ошибка определения датчика скорости транспортного средства возникает, и информация команды начала движения может представляться в надлежащее время, когда транспортное средство-носитель управляется таким образом, чтобы выполнять остановку.
[0051] В одном или более вариантах осуществления настоящего изобретения, до тех пор, пока первый период времени не истечет после того, как скорость транспортного средства для транспортного средства-носителя становится нулевой, управление движением в режиме следования продолжается, и когда первый период времени истекает, управление движением в режиме следования отменяется, и управление ожиданием при движении в режиме следования начинается. Помимо этого, когда водитель командует транспортному средству-носителю начать движение во время управления ожиданием при движении в режиме следования, управление движением в режиме следования начинается, чтобы управлять транспортным средством-носителем таким образом, чтобы начать движение. Через эту операцию, когда транспортное средство-носитель управляется таким образом, чтобы временно выполнять остановку вследствие временной остановки движущегося впереди транспортного средства (когда транспортное средство-носитель управляется таким образом, чтобы начать движение до того, как первый период времени истекает), например, транспортное средство-носитель может управляться таким образом, чтобы автоматически начать движение даже без команды, выданной водителем, и в силу этого можно эффективно предотвращать беспокойство водителя в силу выдачи команды начала движения. Кроме того, когда транспортное средство-носитель управляется таким образом, что оно остановлено в течение первого периода времени или более, поскольку движущееся впереди транспортное средство остановлено в течение первого периода времени или более вследствие остановки на красный свет и т.п., транспортное средство-носитель может управляться таким образом, чтобы начать движение на основании намерения водителя.
[0052] В одном или более вариантов осуществления настоящего изобретения, в случае если водитель командует транспортному средству-носителю начать движение во время управления ожиданием при движении в режиме следования, и управление движением в режиме следования начинается, когда транспортное средство-носитель остановлено до тех пор, пока заданный второй период времени не истечет, поскольку движущееся впереди транспортное средство остановлено, информация команды начала движения представляется снова. Это позволяет водителю выдавать команду начала движения снова, когда движущееся впереди транспортное средство не начинает движение.
[0053] В одном или более вариантов осуществления настоящего изобретения, когда операция нажатия педали тормоза выполняется водителем, выполняется определение в отношении того, что транспортное средство-носитель не находится в состоянии, в котором транспортное средство-носитель может начать движение, и конкретное управление выполняется таким образом, чтобы не представлять информацию команды начала движения. Когда операция нажатия педали тормоза выполняется водителем, имеется вероятность того, что водитель нажимает педаль тормоза таким образом, чтобы не трогать с места транспортное средство-носитель. Таким образом, когда водитель может намеренно ограничивать движение транспортного средства-носителя, информация команды начала движения не представляется, и за счет этого можно эффективно предотвращать беспокойство водителя в силу представления информации команды начала движения. В одном или более вариантов осуществления настоящего изобретения, также когда угол поворота при рулении составляет заданное значение или больше, выполняется определение в отношении того, что транспортное средство-носитель не находится в состоянии, в котором транспортное средство-носитель может начать движение, и конкретное управление выполняется таким образом, чтобы не представлять информацию команды начала движения. Цель этой операции состоит в том, чтобы предотвращать резкий поворот транспортного средства-носителя вследствие команды начала движения, выданной водителем, когда угол поворота при рулении составляет заданное значение или больше.
[0054] Варианты осуществления, поясненные выше, описаны для упрощения понимания настоящего изобретения, а не для ограничения настоящего изобретения. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые находятся в пределах объема настоящего изобретения.
[0055] Например, в вышеописанных вариантах осуществления, в качестве примера проиллюстрирована конфигурация, в которой информация команды начала движения представляется водителю, когда транспортное средство-носитель управляется таким образом, чтобы выполнять остановку в ответ на остановку движущегося впереди транспортного средства во время управления движением в режиме следования для транспортного средства-носителя таким образом, что оно движется за движущимся впереди транспортным средством, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, информация команды начала движения представляется водителю, когда транспортное средство-носитель выполняет остановку вследствие остановки на красный свет и т.п. в случае, если управление движением на постоянной скорости выполняется, поскольку движущееся впереди транспортное средство не обнаруживается.
[0056] В вышеописанных вариантах осуществления примерно проиллюстрирована конфигурация, в которой водитель включает переключатель 124 команды начала движения устройства 120 ввода, чтобы за счет этого командовать транспортному средству-носителю начать движение, но помимо этого или альтернативно этой конфигурации, может использоваться конфигурация, в которой, например, транспортному средству-носителю выдаётся команда начать движение, когда водитель нажимает педаль акселератора. Помимо этого или в качестве альтернативы, может использоваться конфигурация, в которой транспортному средству-носителю выдаётся команда начать движение посредством использования микрофона, включенного в устройство 120 ввода, и/или датчика обнаружения движения, который обнаруживает движение водителя.
[0057] В вышеописанных вариантах осуществления, в качестве примера проиллюстрирована конфигурация, в которой информация команды начала движения отображается на экране дисплея 130, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, информация команды начала движения выводится в качестве звука или голоса с использованием динамика, чтобы за счет этого представлять информацию команды начала движения водителю.
[0058] В вышеописанных вариантах осуществления, в качестве примера проиллюстрирована конфигурация, в которой в случае выдачи команды транспортному средству-носителю начать движение до того, как движущееся впереди транспортное средство начинает движение, транспортное средство-носитель управляется таким образом, чтобы начать движение, когда движущееся впереди транспортное средство начинает движение, но настоящее изобретение не ограничено этой конфигурацией, и также может использоваться другая конфигурация, в которой, например, в случае выдачи команды транспортному средству-носителю начать движение до того, как движущееся впереди транспортное средство начинает движение, когда расстояние между транспортными средствами между транспортным средством-носителем и движущимся впереди транспортным средством составляет определенное расстояние или больше, транспортное средство-носитель управляется таким образом, чтобы начать движение на низкой скорости, даже если движущееся впереди транспортное средство не начинает движение. Это позволяет транспортному средству-носителю медленно начать движение в то время, когда транспортное средство, расположенное впереди транспортного средства-носителя через несколько транспортных средств, начинает движение, к примеру, в пробке. Как результат, как и в случае, в котором водитель выполняет управление, транспортное средство-носитель может управляться таким образом, что оно движется за движущимся впереди транспортным средством, которое расположено непосредственно впереди транспортного средства-носителя, со скоростью, соответствующей скорости движущегося впереди транспортного средства в то время, когда движущееся впереди транспортное средство начинает движение.
[0059] В одном или более вариантов осуществления настоящего изобретения, когда остановка движущегося впереди транспортного средства обнаруживается во время выполнения автоматизированного/автономного управления движением, при котором транспортное средство-носитель управляется таким образом, чтобы выполнять остановку независимо от операции торможения, выполняемой водителем, информация команды начала движения для напоминания водителю в отношении команды начала движения для транспортного средства-носителя может представляться независимо от состояния транспортного средства-носителя, к примеру, того, остановлено ли транспортное средство-носитель (этап S106 по фиг. 4), того, истекает ли заданный первый период времени после того, как скорость транспортного средства для транспортного средства-носителя становится нулевой (этап S107 по фиг. 4), того, находится ли транспортное средство-носитель в состоянии, в котором транспортное средство-носитель может начать движение (этап S108 по фиг. 4), либо того, переходит ли режим управления с управления движением в режиме следования на управление ожиданием при движении в режиме следования (этап S109 по фиг. 4).
[0060] Вышеописанные набор 110 датчиков, устройство 150 управления и дисплей 130 соответствуют устройству представления в настоящем изобретении, и набор 110 датчиков, устройство 120 ввода и устройство 150 управления соответствуют контроллеру движения в настоящем изобретении.
Описание условных обозначений
[0061] 100 - Устройство управления для транспортного средства
110 - набор датчиков
120 - устройство ввода
130 - дисплей
140 - приводной механизм
150 - устройство управления
Изобретение относится к способу и устройству управления движением для транспортного средства. Способ управления движением для транспортного средства содержит этапы, на которых выполняют автоматизированное управление движением, при котором транспортное средство-носитель управляется таким образом, чтобы следовать за движущимся впереди транспортным средством и выполнять остановку независимо от операции торможения и когда транспортное средство-носитель и движущееся впереди транспортное средство останавливаются во время автоматизированного управления движением, представляют информацию команды начала движения для напоминания водителю в отношении команды начала движения для транспортного средства-носителя и когда водитель командует транспортному средству-носителю начать движение после того, как представляется информация команды начала движения, и когда обнаруживается, что движущееся впереди транспортное средство начинает движение, управляют транспортным средством-носителем таким образом, чтобы начать движение. Устройство управления движением для транспортного средства, содержит контроллер движения и устройство представления. Достигается повышение безопасности. 2 н. и 8 з.п. ф-лы, 5 ил.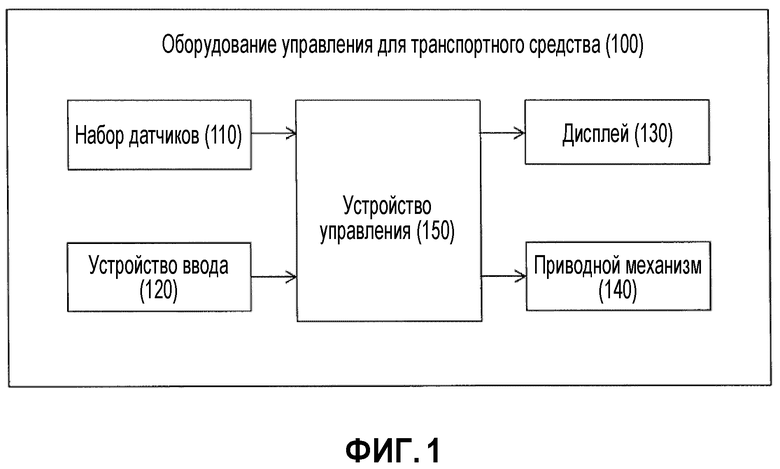
1. Способ управления движением для транспортного средства, содержащий этапы, на которых:
- выполняют автоматизированное управление движением, при котором транспортное средство-носитель управляется таким образом, чтобы следовать за движущимся впереди транспортным средством и выполнять остановку независимо от операции торможения, выполняемой водителем; и
- когда транспортное средство-носитель и движущееся впереди транспортное средство останавливаются во время автоматизированного управления движением, представляют информацию команды начала движения для напоминания водителю в отношении команды начала движения для транспортного средства-носителя, до того, как движущееся впереди транспортное средство начнёт движение; и
- когда водитель командует транспортному средству-носителю начать движение после того, как представляется информация команды начала движения, и когда обнаруживается, что движущееся впереди транспортное средство, для которого обнаружена остановка, начинает движение, управляют транспортным средством-носителем таким образом, чтобы начать движение.
2. Способ управления для транспортного средства по п. 1, в котором, когда транспортное средство-носитель выполняет остановку посредством обнаружения остановки движущегося впереди транспортного средства во время управления движением в режиме следования, при котором транспортное средство-носитель управляется таким образом, что оно движется с возможностью следования за движущимся впереди транспортным средством, представляется информация команды начала движения.
3. Способ управления для транспортного средства по п. 2, в котором, когда заданный первый период времени истекает после того, как скорость транспортного средства для транспортного средства-носителя становится нулевой, выполняется определение в отношении того, что транспортное средство-носитель остановлено.
4. Способ управления для транспортного средства по п. 3, в котором, когда заданный первый период времени истекает, и выполняется определение в отношении того, что удовлетворяются все условия того, что водитель не нажимает педаль тормоза, угол поворота при рулении для руления не составляет заданное значение или более, и может выполняться управление движением в режиме следования, представляется информация команды начала движения.
5. Способ управления для транспортного средства по п. 3, в котором:
- до тех пор, пока первый период времени не истечет после того, как скорость транспортного средства для транспортного средства-носителя становится нулевой, управление движением в режиме следования продолжается таким образом, что транспортное средство-носитель управляется таким образом, что оно движется с возможностью следования за движущимся впереди транспортным средством, и
- после того, как первый период времени истекает, представляется информация команды начала движения, и управление движением в режиме следования отменяется, чтобы выполнять управление ожиданием при движении в режиме следования для управления транспортным средством-носителем таким образом, чтобы выполнять остановку до тех пор, пока водитель не скомандует транспортному средству-носителю начать движение.
6. Способ управления для транспортного средства по п. 5, в котором, когда водитель командует транспортному средству-носителю начать движение во время управления ожиданием при движении в режиме следования, управление ожиданием при движении в режиме следования отменяется, чтобы выполнять управление движением в режиме следования.
7. Способ управления для транспортного средства по п. 1, в котором:
- когда водитель командует транспортному средству-носителю начать движение, таким образом прерывая представление информации команд начала движения, обнаруживается, остановлено ли движущееся впереди транспортное средство, и
- когда движущееся впереди транспортное средство остановлено до тех пор, пока не истечет заданный второй период времени, информация команды начала движения представляется снова.
8. Способ управления для транспортного средства по любому из пп. 1-7, в котором, когда водитель нажимает педаль тормоза, угол поворота при рулении для руления составляет заданное значение или больше, или управление движением в режиме следования не может выполняться, представление информации команды начала движения запрещается.
9. Способ управления для транспортного средства по любому из пп. 1-7, в котором движущееся впереди транспортное средство является движущимся впереди транспортным средством, которое расположено непосредственно впереди транспортного средства-носителя.
10. Устройство управления движением для транспортного средства, содержащее:
- контроллер движения, выполненный с возможностью выполнения автоматизированным управлением движением, при котором транспортное средство-носитель управляется таким образом, чтобы следовать за движущимся впереди транспортным средством и выполнять остановку независимо от операции торможения, выполняемой водителем; и
- устройство представления, выполненное с возможностью, когда транспортное средство-носитель и движущееся впереди транспортное средство остановлены во время выполнения автоматизированного управления движением, представления информации команды начала движения для напоминания водителю в отношении команды начала движения для транспортного средства-носителя, до того, как движущееся впереди транспортное средство начнёт движение; и
- при этом контроллер движения дополнительно выполнен с возможностью управления транспортным средством-носителем таким образом, чтобы начать движение, когда водитель командует транспортному средству-носителю начать движение после того, как представляется информация команды начала движения, и когда обнаруживается, что движущееся впереди транспортное средство, для которого обнаружена остановка, начинает движение.
| JP 4564041 B2, 20.10.2010 | |||
| JP 2008044421 A, 28.02.2008 | |||
| US 8396641 B2, 12.03.2013. |

