Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к технологии управления автономным движением с использованием устройства электроусилителя руля (EPS).
Уровень техники
[0002] Патентный документ 1 раскрывает систему рулевого управления транспортного средства, содержащую функцию автоматического рулевого управления. Система рулевого управления имеет устройство EPS. В ходе нормального рулевого управления, при котором водитель выполняет рулевое управление, система рулевого управления управляет устройством EPS таким образом, чтобы формировать вспомогательный крутящий момент, который усиливает рулевое управление со стороны водителя. С другой стороны, в ходе автоматического рулевого управления система рулевого управления использует устройство EPS для выполнения управления углом поворота рулевого управления таким образом, что угол поворота рулевого управления для колеса становится целевым углом поворота рулевого управления.
[0003] Патентный документ 2 раскрывает устройство помощи при рулении для транспортного средства. Когда водитель имеет намерение руления, устройство помощи при рулении выполняет управление стабилизацией транспортного средства. С другой стороны, когда водитель не имеет намерения осуществлять рулевое управление, устройство помощи при рулении выполняет управление удержанием на полосе движения. При управлении удержанием на полосе движения, устройство помощи при рулении выполняет управление углом поворота рулевого управления посредством использования устройства EPS.
Список цитируемых источников
[0004] Патентный документ 1. Опубликованная заявка на патент Японии № 2008-189058
Патентный документ 2. Опубликованная заявка на патент Японии № 2002-46640
Раскрытие изобретения
[0005] Рассмотрим случай, в котором автоматическое руление выполняется посредством использования устройства EPS в ходе автономного движения транспортного средства. Когда устройство EPS быстро поворачивает колесо, руль, соединенный с колесом, также вращается быстро в сочетании с поворотом колеса. Например, когда автоматическое руление выполняется быстро, чтобы немедленно объехать помеху впереди транспортного средства, руль также вращается быстро в сочетании с означенным. Такое быстрое движение руля затрудняет захват руля для водителя. В качестве примера, если условие для перехвата управления состоит в том, что водитель захватывает руль в ходе автономного движения, быстрое движение руля затрудняет перехват управления для водителя.
[0006] Задача настоящего изобретения состоит в создании технологии, которая облегчает захват руля для водителя в ходе автономного движения транспортного средства.
[0007] Первое изобретение обеспечивает устройство управления движением транспортного средства.
Устройство управления движением транспортного средства включает в себя:
- устройство электроусилителя руля, поворачивающее колесо транспортного средства;
- устройство рулевого управления с переменным передаточным отношением, допускающее изменение отношения угла поворота руля и угла поворота рулевого управления для колеса; и
- устройство управления, выполняющее управление автономным движением, которое управляет автономным движением транспортного средства.
Управление автономным движением включает в себя:
- обработку вычисления целевого угла поворота рулевого управления, которая вычисляет целевой угол поворота рулевого управления для колеса;
- управление поворотом, которое приводит в действие устройство электроусилителя руля для поворота колеса таким образом, что угол поворота рулевого управления для колеса становится целевым углом поворота рулевого управления; и
- управление углом поворота руля, которое приводит в действие, на основании целевого угла поворота рулевого управления, устройство рулевого управления с переменным передаточным отношением в таком направлении, чтобы подавлять изменение угла поворота руля, вызываемое посредством управления поворотом.
[0008] Второе изобретение дополнительно имеет следующий признак в дополнение к первому изобретению.
Обработка вычисления целевого угла поворота рулевого управления включает в себя:
- первую обработку, которая вычисляет угол поворота рулевого управления в ходе автономного движения, требуемый для автоматического руления при автономном движении; и
- вторую обработку, которая вычисляет угол поворота при контррулении, требуемый для управления стабилизацией транспортного средства.
Целевой угол поворота рулевого управления является суммой угла поворота рулевого управления в ходе автономного движения и угла поворота при контррулении.
[0009] Третье изобретение дополнительно имеет следующий признак в дополнение ко второму изобретению.
Первая обработка дополнительно вычисляет целевую величину состояния транспортного средства, требуемую для автоматического руления.
Вторая обработка вычисляет угол поворота при контррулении на основании целевой величины состояния без использования угла поворота руля.
[0010] Четвертое изобретение обеспечивает способ управления автономным движением для управления автономным движением транспортного средства.
Транспортное средство включает в себя:
- устройство электроусилителя руля, поворачивающее колесо транспортного средства; и
- устройство рулевого управления с переменным передаточным отношением, допускающее изменение отношения угла поворота руля и угла поворота рулевого управления колеса.
Способ управления автономным движением включает в себя:
- вычисление целевого угла поворота рулевого управления для колеса;
- приведение в действие устройства электроусилителя руля для поворота колеса таким образом, что угол поворота рулевого управления для колеса становится целевым углом поворота рулевого управления; и
- приведение в действие, на основании целевого угла поворота рулевого управления, устройства рулевого управления с переменным передаточным отношением в таком направлении, чтобы подавлять изменение угла поворота руля, вызываемое посредством поворота колеса.
[0011] Согласно первому изобретению при автономном движении управление поворотом выполняется посредством использования устройства электроусилителя руля. Помимо этого, управление углом поворота руля выполняется для ослабления изменения угла поворота руля, вызываемое посредством управления поворотом. Более конкретно, управление углом поворота руля приводит в действие устройство рулевого управления с переменным передаточным отношением в таком направлении, чтобы подавлять изменение угла поворота руля, вызываемое посредством управления поворотом. В результате, подавляется быстрое движение руля в ходе автономного движения, что упрощает захват руля для водителя.
[0012] Согласно второму изобретению, можно выполнять управление углом поворота руля с учетом угла поворота при контррулении, требуемого для управления стабилизацией транспортного средства.
[0013] Согласно третьему изобретению, угол поворота руля не используется для вычисления угла поворота при контррулении для управления стабилизацией транспортного средства. Вместо этого, используется целевая величина состояния транспортного средства, требуемая для автоматического руления. В результате можно более точно вычислять угол поворота при контррулении в ходе автономного движения.
[0014] Согласно четвертому изобретению могут быть получены те же преимущества, что и в случае первого изобретения.
Краткое описание чертежей
[0015] Фиг. 1 является принципиальной схемой, показывающей пример конфигурации устройства управления движением транспортного средства согласно варианту осуществления настоящего изобретения;
Фиг. 2 является блок-схемой, показывающей функциональную конфигурацию устройства управления согласно варианту осуществления настоящего изобретения;
Фиг. 3 является концептуальной схемой, показывающей обработку управления в ходе неавтономного движения согласно варианту осуществления настоящего изобретения;
Фиг. 4 является концептуальной схемой, показывающей обработку управления в ходе автономного движения согласно сравнительному примеру;
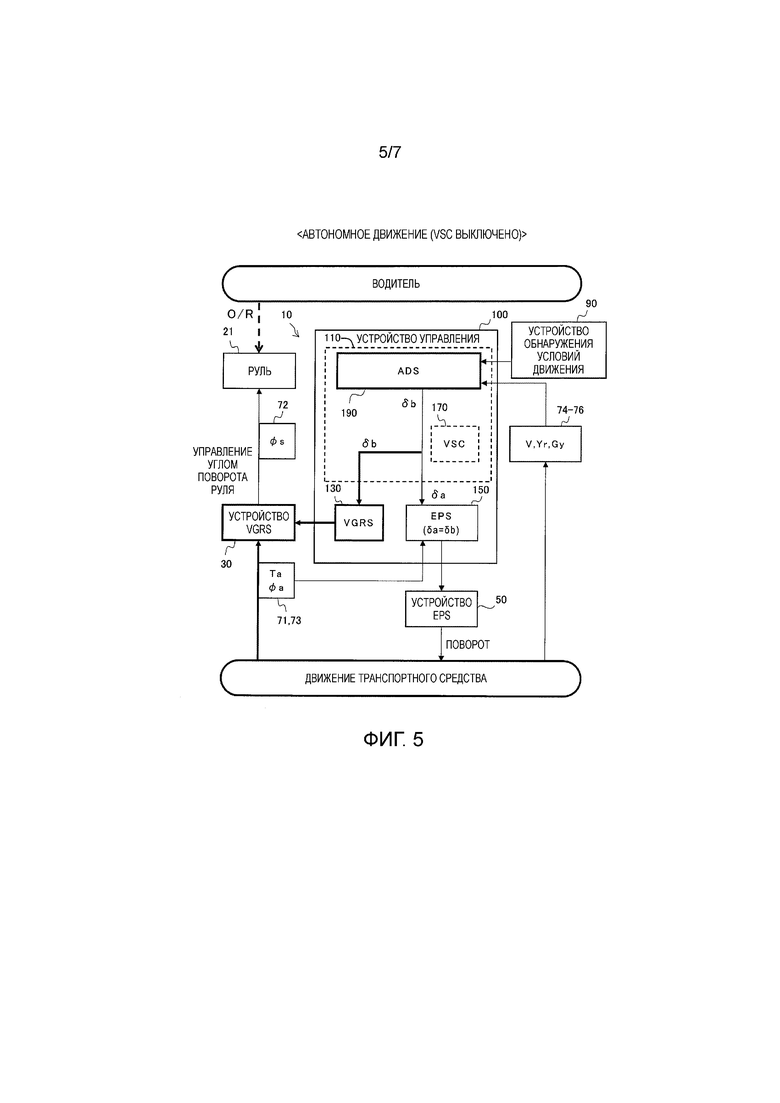
Фиг. 5 является концептуальной схемой, показывающей первый пример обработки управления в ходе автономного движения согласно варианту осуществления настоящего изобретения;
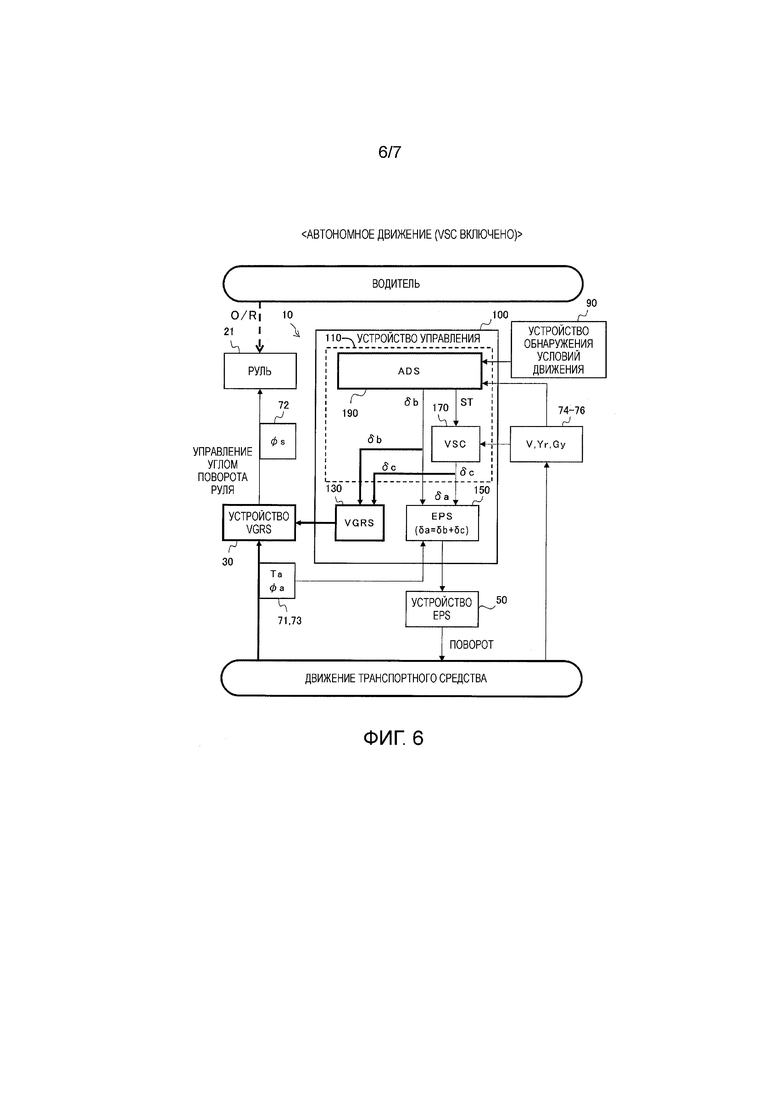
Фиг. 6 является концептуальной схемой, показывающей второй пример обработки управления в ходе автономного движения согласно варианту осуществления настоящего изобретения; и
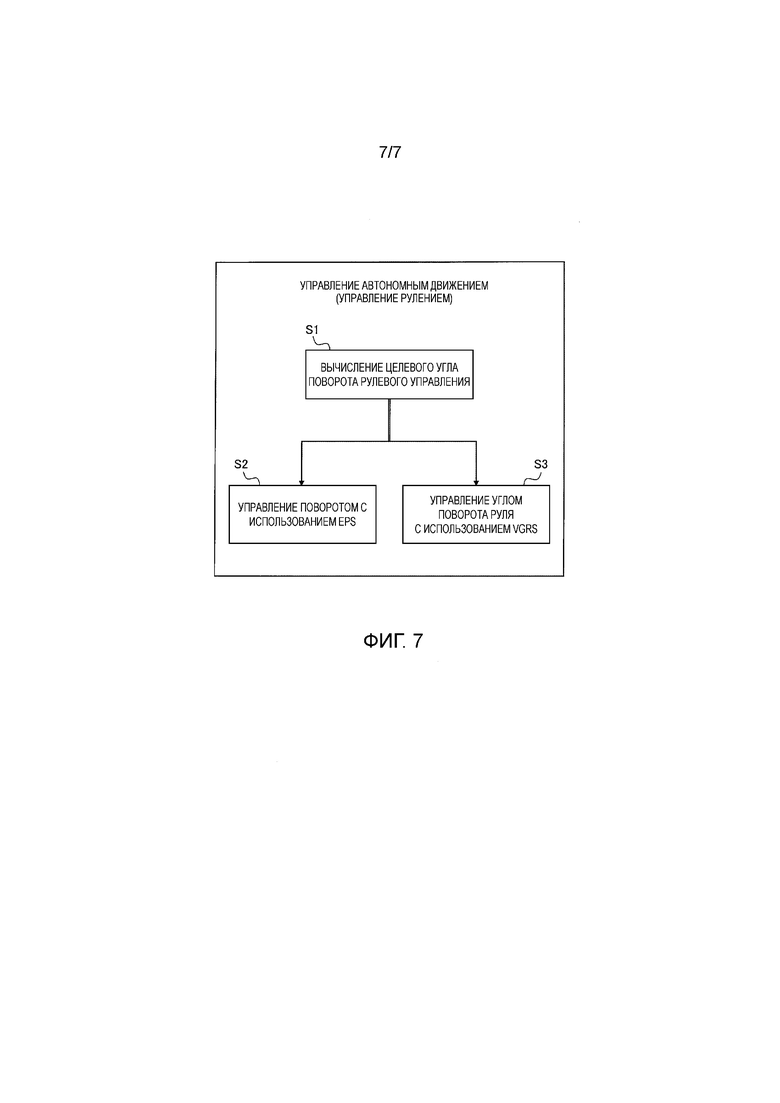
Фиг. 7 является блок-схемой способа, обобщенно показывающей способ управления автономным движением согласно варианту осуществления настоящего изобретения.
Осуществление изобретения
[0016] Ниже описаны варианты осуществления настоящего изобретения с обращением к прилагаемым чертежам.
[0017] 1. Пример конфигурации устройства управления движением транспортного средства
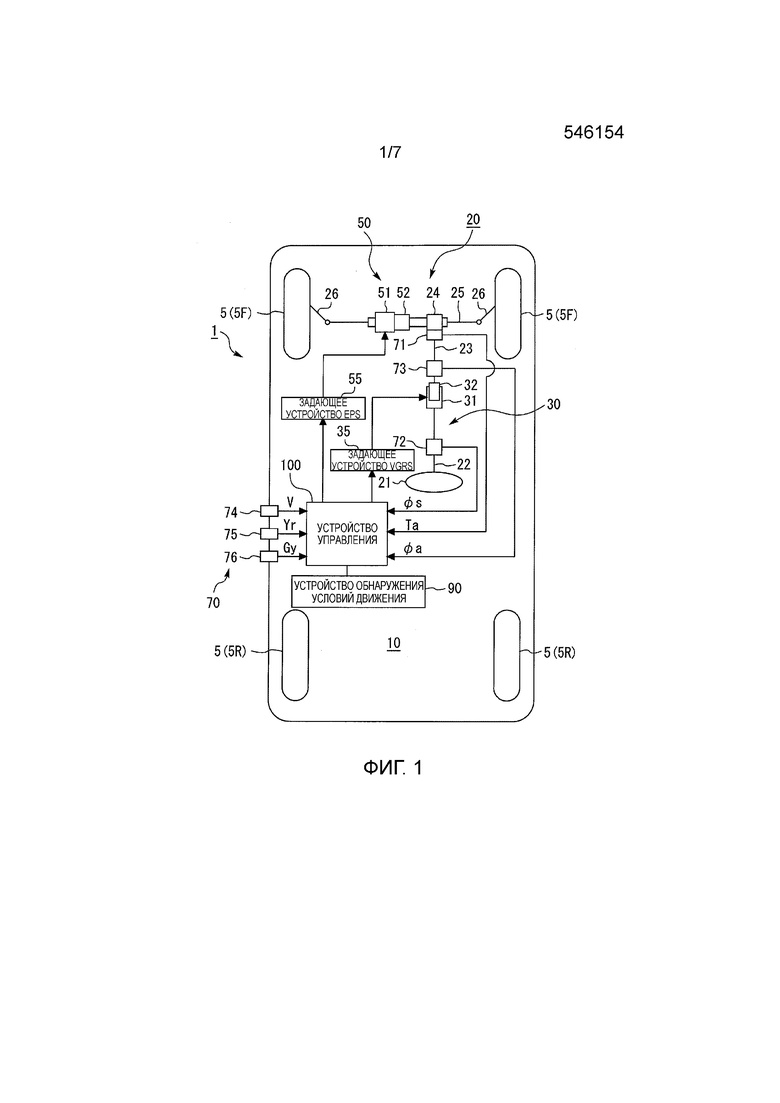
Фиг. 1 является принципиальной схемой, показывающей пример конфигурации устройства управления движением транспортного средства согласно варианту осуществления настоящего изобретения. Транспортное средство 1 имеет колеса 5 и устройство 10 управления движением транспортного средства. Колеса 5 включают в себя переднее колесо 5F и заднее колесо 5R. В примере, показанном на фиг. 1, цель руления представляет собой переднее колесо 5F. Следует отметить, что настоящий вариант осуществления также может применяться к случаю 4WS (руление четырьмя колесами), в котором цель руления включает в себя как переднее колесо 5F, так и заднее колесо 5R.
[0018] Устройство 10 управления движением транспортного средства управляет движением транспортного средства 1. В настоящем варианте осуществления, внимание конкретно акцентируется на управлении поворотом и управлении автономным движением, выполняемом посредством устройства 10 управления движением транспортного средства. В качестве конфигурации, связанной с управлением поворотом и управлением автономным движением, устройство 10 управления движением транспортного средства содержит устройство 20 управления поворотом, группу 70 датчиков, устройство 90 обнаружения условий движения и устройство 100 управления.
[0019] 1-1. Устройство 20 управления поворотом
Устройство 20 управления поворотом поворачивает переднее колесо 5F. Более конкретно, устройство 20 управления поворотом включает в себя руль 21, верхний рулевой вал 22, нижний рулевой вал 23, ведущую шестерню 24, зубчатую рейку 25, поперечную рулевую тягу 26, устройство 30 рулевого управления с переменным передаточным отношением (далее называемое «устройством VGRS (рулевого управления с переменным передаточным отношением)») и устройство 50 электроусилителя руля (далее называемое «устройством EPS (электроусилителя руля)»).
[0020] Руль 21 используется для операции руления водителем. Таким образом, водитель поворачивает руль 21, когда водитель хочет поворачивать переднее колесо 5F. Верхний рулевой вал 22 соединяется с рулем 21. Один конец нижнего рулевого вала 23 соединяется с верхним рулевым валом 22 через устройство 30 VGRS, и другой его конец соединяется с ведущей шестерней 24. Ведущая шестерня 24 зацепляется с зубчатой рейкой 25. Оба конца зубчатой рейки 25, соответственно, соединяются с левым и правым передними колесами 5F через поперечные рулевые тяги 26. Поворот руля 21 передается в ведущую шестерню 24 через верхний рулевой вал 22, устройство 30 VGRS и нижний рулевой вал 23. Вращательное движение ведущей шестерни 24 преобразуется в прямолинейное движение зубчатой рейки 25, и в силу этого угол поворота рулевого управления для переднего колеса 5F изменяется.
[0021] Устройство 30 VGRS представляет собой устройство для изменения передаточного отношения рулевого управления. Здесь, передаточное отношение рулевого управления является отношением угла поворота руля (т.е. угла поворота рулевого управления для руля 21) и угла поворота рулевого управления для переднего колеса 5F и является пропорциональным отношению угла вращения верхнего рулевого вала 22 и угла вращения нижнего рулевого вала 23. С этой целью, устройство 30 VGRS предусмотрено с возможностью соединения между верхним рулевым валом 22 и нижним рулевым валом 23.
[0022] Более конкретно, устройство 30 VGRS включает в себя электромотор 31 и задающее устройство 35 VGRS. Корпус электромотора 31 прикрепляется к одному концу верхнего рулевого вала 22 и вращается вместе с верхним рулевым валом 22. Статор электромотора 31 закрепляется внутри корпуса. С другой стороны, ротор 32 электромотора 31 соединяется с нижним рулевым валом 23 через редуктор. Посредством вращения электромотора 31, изменяется угол относительного вращения между верхним рулевым валом 22 и нижним рулевым валом 23, т.е. изменяется передаточное отношение рулевого управления.
[0023] Задающее устройство 35 VGRS представляет собой устройство для приведения в действие электромотора 31 и включает в себя инвертор и т.д. Инвертор преобразует мощность постоянного тока, подаваемую из источника питания постоянного тока (не показан), в мощность переменного тока и подает мощность переменного тока в электромотор 31, чтобы приводить в действие электромотор 31. Посредством управления вращением электромотора 31, можно регулируемо управлять передаточным отношением рулевого управления. Работа задающего устройства 35 VGRS, т.е. работа устройства 30 VGRS управляется посредством устройства 100 управления. Ниже описаны подробности управления устройством 30 VGRS посредством устройства 100 управления.
[0024] Устройство 50 EPS представляет собой устройство для выработки мощности, чтобы поворачивать переднее колесо 5F. Более конкретно, устройство 50 EPS включает в себя электромотор 51 и задающее устройство 55 EPS. Например, электромотор 51 соединяется с зубчатой рейкой 25 через механизм 52 преобразования. Механизм 52 преобразования представляет собой, например, шариково-винтовую передачу. Когда ротор электромотора 51 вращается, механизм 52 преобразования преобразует вращательное движение в прямолинейное движение зубчатой рейки 25, и в силу этого угол поворота рулевого управления для переднего колеса 5F изменяется.
[0025] Задающее устройство 55 EPS представляет собой устройство для приведения в действие электромотора 51 и включает в себя инвертор и т.д. Инвертор преобразует мощность постоянного тока, подаваемую из источника питания постоянного тока (не показан), в мощность переменного тока и подает мощность переменного тока в электромотор 51, чтобы приводить в действие электромотор 51. Посредством управления вращением электромотора 51, можно поворачивать переднее колесо 5F. Работа задающего устройства 55 EPS, т.е. работа устройства 50 EPS? управляется посредством устройства 100 управления. Ниже описаны подробности управления устройством 50 EPS посредством устройства 100 управления.
[0026] 1-2. Группа 70 датчиков
Группа 70 датчиков предусмотрена для определения множества величин состояния транспортного средства 1. Например, группа 70 датчиков включает в себя датчик 71 крутящего момента, датчик 72 угла поворота руля, датчик 73 угла вращения, датчик 74 скорости транспортного средства, датчик 75 скорости относительно вертикальной оси и датчик 76 поперечного ускорения.
[0027] Датчик 71 крутящего момента определяет крутящий момент Ta поворота рулевого управления, прикладываемый к нижнему рулевому валу 23. Датчик 71 крутящего момента выводит определенную информацию, указывающую определенный крутящий момент Ta поворота рулевого управления, в устройство 100 управления.
[0028] Датчик 72 угла поворота руля определяет угол вращения верхнего рулевого вала 22, т.е. угол ϕs поворота руля (т.е. угол поворота рулевого управления для руля 21). Датчик 72 угла поворота руля выводит определенную информацию, указывающую определенный угол ϕs поворота руля, в устройство 100 управления.
[0029] Датчик 73 угла вращения определяет угол ϕa вращения нижнего рулевого вала 23. Угол ϕa вращения соответствует фактическому углу поворота рулевого управления для переднего колеса 5F. Датчик 73 угла вращения выводит определенную информацию, указывающую определенный угол ϕa вращения, в устройство 100 управления.
[0030] Датчик 74 скорости транспортного средства определяет скорость V транспортного средства, которая представляет собой скорость транспортного средства 1. Датчик 74 скорости транспортного средства выводит определенную информацию, указывающую определенную скорость V транспортного средства, в устройство 100 управления.
[0031] Датчик 75 скорости относительно вертикальной оси определяет фактическую скорость Yr относительно вертикальной оси транспортного средства 1. Датчик 75 скорости относительно вертикальной оси выводит определенную информацию, указывающую определенную фактическую скорость Yr относительно вертикальной оси, в устройство 100 управления.
[0032] Датчик 76 поперечного ускорения определяет фактическое поперечное ускорение Gy, действующее на транспортное средство 1. Датчик 76 поперечного ускорения выводит определенную информацию, указывающую определенное фактическое поперечное ускорение Gy, в устройство 100 управления.
[0033] 1-3. Устройство 90 обнаружения условий движения
Устройство 90 обнаружения условий движения получает «информацию условий движения», используемую для управления автономным движением транспортного средства 1. Информация условий движения примерно иллюстрируется посредством информации положения и ориентации, информации полос движения, информации окружающих целей, обеспечиваемой инфраструктурой информации и т.д. Для получения такой информации условий движения устройство 90 обнаружения условий движения включает в себя, например, устройство по стандарту GPS (глобальной системы позиционирования), картографическую базу данных, датчик и устройство связи.
[0034] GPS-устройство принимает сигналы, передаваемые из множества GPS-спутников, и вычисляет положение и местоположение (т.е. ориентацию) транспортного средства 1 на основании принимаемых сигналов. GPS-устройство отправляет вычисленную информацию положения и ориентации в устройство 100 управления.
[0035] Информация полос движения, указывающая геометрию каждой полосы движения на карте, записывается в картографическую базу данных. На основании картографической базы данных и положения транспортного средства 1, можно получать информацию полос движения вокруг транспортного средства 1.
[0036] Датчик обнаруживает информацию окружающих целей относительно цели вокруг транспортного средства 1. Датчик примерно иллюстрируется посредством лидара (на основании оптического обнаружения и дальнометрии), радара миллиметрового диапазона, стереокамеры и т.д. Лидар использует лазерные излучения, чтобы обнаруживать цель вокруг транспортного средства 1. Радар миллиметрового диапазона использует радиоволны, чтобы обнаруживать цель вокруг транспортного средства 1. Стереокамера формирует изображение ситуации вокруг транспортного средства 1. Окружающая цель включает в себя движущуюся цель и стационарную цель. Движущаяся цель примерно иллюстрируется посредством окружающего транспортного средства и пешехода. Информация движущейся цели включает в себя положения и скорость движущейся цели. Стационарная цель примерно иллюстрируется посредством придорожного сооружения и сигнальной линии дорожной разметки. Информация стационарной цели включает в себя положение стационарной цели. Датчик отправляет обнаруженную информацию окружающих целей в устройство 100 управления.
[0037] Устройство связи получает обеспечиваемую инфраструктурой информацию из системы обеспечения информации. Обеспечиваемая инфраструктурой информация примерно иллюстрируется посредством информации дорожного движения, информации участков проведения дорожных работ и т.д. Устройство связи отправляет такую обеспечиваемую инфраструктурой информацию в устройство 100 управления.
[0038] 1-4. Устройство 100 управления
Устройство 100 управления управляет устройством 10 управления движением транспортного средства согласно настоящему варианту осуществления. Типично, устройство 100 управления представляет собой микрокомпьютер, включающий в себя процессор, запоминающее устройство и интерфейс ввода-вывода. Устройство 100 управления также называется ECU (электронным модулем управления). Устройство 100 управления принимает определенную информацию из группы 70 датчиков и информацию условий движения из устройства 90 обнаружения условий движения через интерфейс ввода-вывода. На основании определенной информации и информации условий движения, устройство 100 управления выполняет управление поворотом и управление автономным движением.
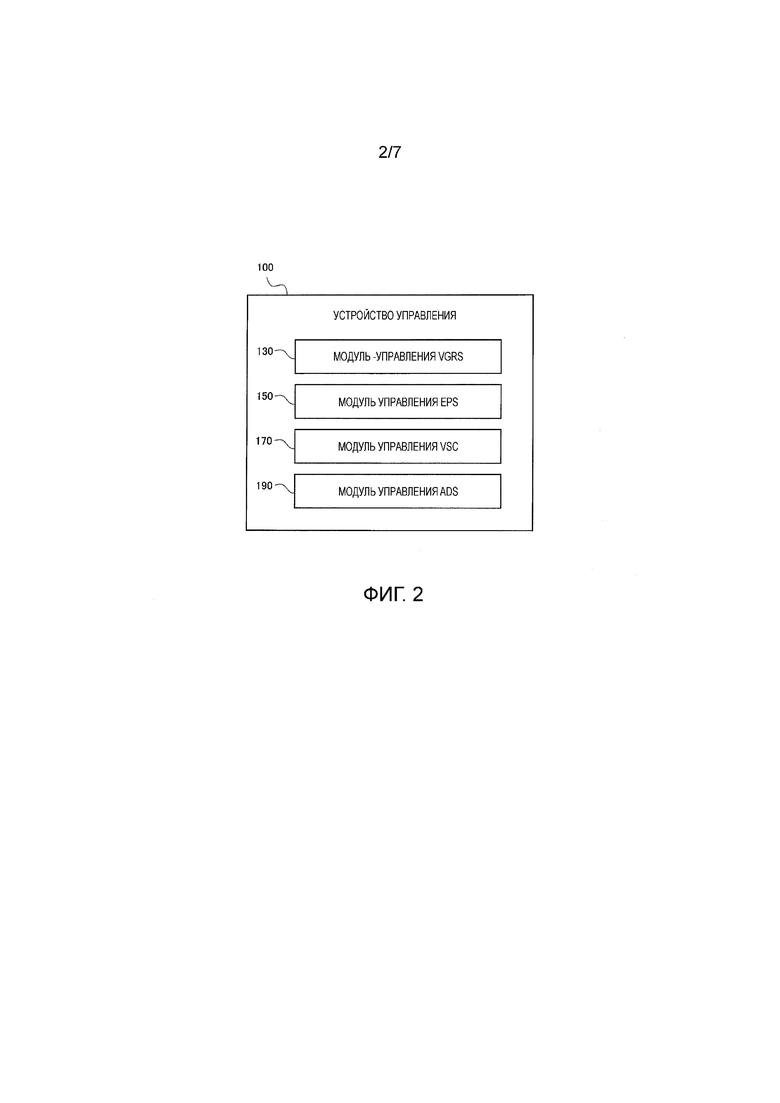
[0039] Фиг. 2 является блок-схемой, показывающей функциональную конфигурацию устройства 100 управления согласно настоящему варианту осуществления. Устройство 100 управления включает в себя модуль 130 управления VGRS, модуль 150 управления EPS, модуль 170 управления VSC (устойчивостью транспортного средства) и модуль 190 управления ADS (системы автономного движения), в качестве функциональных блоков, связанных с управлением поворотом и управлением автономным движением. Эти функциональные блоки осуществляются посредством процессора устройства 100 управления, выполняющего управляющую программу, сохраненную в запоминающем устройстве. Управляющая программа может записываться на машиночитаемом носителе записи.
[0040] Модуль 130 управления VGRS управляет работой VGRS-устройства 30 (т.е. задающего устройства 35 VGRS). Модуль 150 управления EPS управляет работой устройства 50 EPS (т.е. задающего устройства 55 EPS). Модуль 170 управления VSC выполняет управление стабилизацией транспортного средства для стабилизации движения транспортного средства 1. Модуль 190 управления ADS выполняет управление автономным движением, которое управляет автономным движением транспортного средства 1.
[0041] Далее в данном документе подробно описана обработка управления посредством устройства 100 управления в каждом из случаев неавтономного движения и автономного движения.
[0042] 2. Обработка управления в ходе неавтономного движения
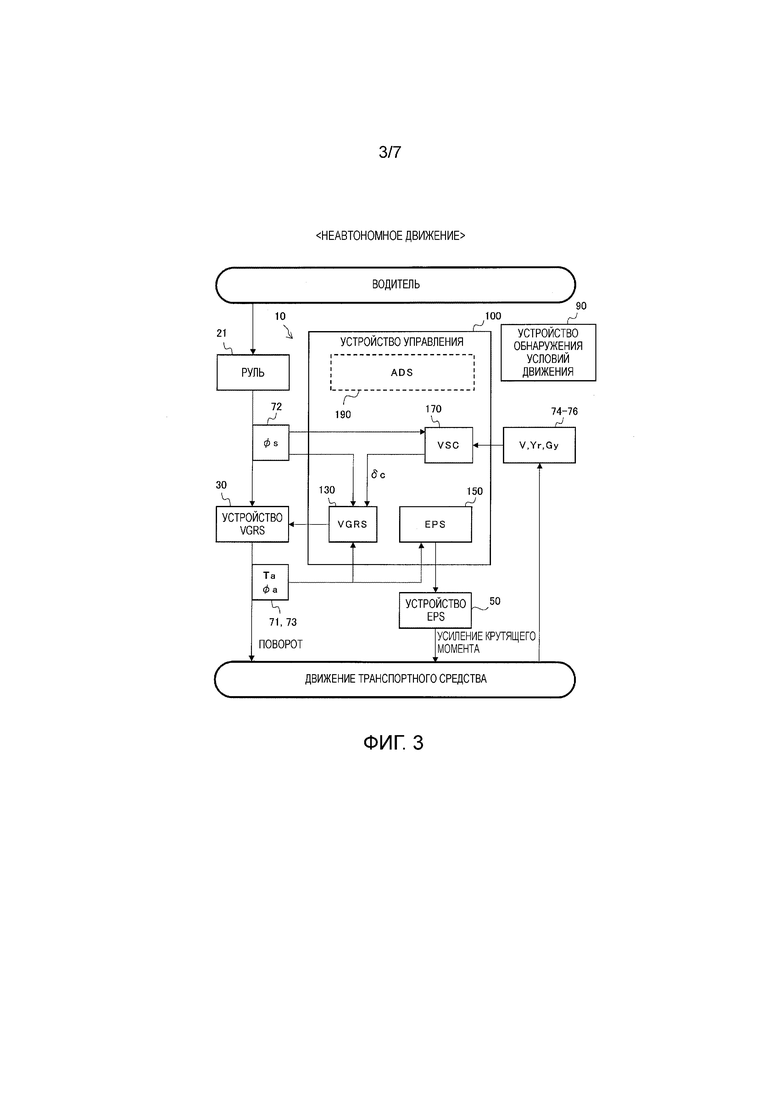
Фиг. 3 является концептуальной схемой, показывающей обработку управления в ходе неавтономного движения согласно настоящему варианту осуществления. В ходе неавтономного движения управляющим объектом является водитель, и водитель поворачивает руль 21. Таким образом, угол ϕs поворота руля определяется посредством операции водителя.
[0043] Модуль 170 управления VSC
Модуль 170 управления VSC выполняет управление стабилизацией транспортного средства для стабилизации движения транспортного средства 1. Более конкретно, модуль 170 управления VSC принимает определенную информацию угла ϕs поворота руля, скорости V транспортного средства, фактической скорости Yr относительно вертикальной оси, фактического поперечного ускорения Gy и т.п. из группы 70 датчиков. На основании определенной информации модуль 170 управления VSC обнаруживает неустойчивое поведение, к примеру, занос на повороте, недостаточную поворачиваемость, избыточную поворачиваемость и т.д.
[0044] Например, модуль 170 управления VSC вычисляет целевую скорость относительно вертикальной оси на основании угла ϕs поворота руля и скорости V транспортного средства посредством общеизвестного способа. Затем модуль 170 управления VSC вычисляет отклонение скорости относительно вертикальной оси, которое является разностью между фактической скоростью Yr относительно вертикальной оси и целевой скоростью относительно вертикальной оси. Посредством сравнения отклонения скорости относительно вертикальной оси с пороговым значением, модуль 170 управления VSC может обнаруживать избыточную поворачиваемость или недостаточную поворачиваемость.
[0045] Чтобы придавать устойчивость движению транспортного средства, необходимо формировать противоположный момент относительно вертикальной оси, который может уравновешивать неустойчивое поведение. Такой противоположный момент относительно вертикальной оси может быть реализован посредством разности тормозной силы между левым и правым колесами 5, поворота колеса 5 и т.п. В настоящем варианте осуществления, рассматривается только противоположный момент относительно вертикальной оси, сформированный посредством поворота переднего колеса 5F. Модуль 170 управления VSC вычисляет целевую величину изменения угла поворота рулевого управления для переднего колеса 5F, которая требуется для формирования противоположного момента относительно вертикальной оси. Такая целевая величина изменения угла поворота рулевого управления далее называется «углом δc поворота при контррулении». Таким образом, модуль 170 управления VSC вычисляет угол δc поворота при контррулении, требуемый для управления стабилизацией транспортного средства.
[0046] Модуль 130 управления VGRS
Модуль 130 управления VGRS выполняет «управление поворотом (управление углом поворота рулевого управления)» посредством использования устройства 30 VGRS. Более конкретно, модуль 130 управления VGRS принимает определенную информацию угла ϕs поворота руля и угла ϕa вращения из датчика 72 угла поворота руля и датчика 73 угла вращения, соответственно. Помимо этого, модуль 130 управления VGRS вычисляет целевой угол вращения или целевой угол относительного вращения. Целевой угол вращения является целевым значением угла ϕa вращения. Целевой угол относительного вращения является целевым значением разности между углом ϕs поворота руля и углом ϕa вращения.
[0047] Например, модуль 130 управления VGRS принимает информацию, указывающую угол δc поворота при контррулении, из модуля 170 управления VSC. В этом случае, модуль 130 управления VGRS вычисляет целевой угол относительного вращения, соответствующий углу δc поворота при контррулении. В качестве альтернативы, модуль 130 управления VGRS вычисляет сумму угла ϕs поворота руля и целевого угла относительного вращения в качестве целевого угла вращения.
[0048] В качестве другого примера, модуль 130 управления VGRS может вычислять целевой угол поворота рулевого управления для переднего колеса 5F для достижения требуемых динамических характеристик транспортного средства. Например, модуль 130 управления VGRS имеет карту угла поворота рулевого управления, указывающую взаимосвязь между входным параметром и целевым углом поворота рулевого управления. Входной параметр включает в себя, например, угол ϕs поворота руля и угловую скорость dϕs/dt поворота руля. Входной параметр дополнительно может включать в себя скорость V транспортного средства, определенную посредством датчика 74 скорости транспортного средства. Карта угла поворота рулевого управления определяется заранее с учетом требуемых динамических характеристик транспортного средства. В ответ на операцию поворота руля 21 водителем, модуль 130 управления VGRS обращается к карте угла поворота рулевого управления, чтобы вычислять целевой угол поворота рулевого управления согласно входному параметру. Затем модуль 130 управления VGRS вычисляет целевой угол вращения или целевой угол относительного вращения из целевого угла поворота рулевого управления.
[0049] В любом случае, модуль 130 управления VGRS выполняет управление с обратной связью задающим устройством 35 VGRS на основании определенной информации таким образом, что получается целевой угол вращения или целевой угол относительного вращения. Задающее устройство 35 VGRS приводит в действие (приводит в действие) электромотор 31 в соответствии с управляющим сигналом из модуля 130 управления VGRS. В результате, угол поворота рулевого управления для переднего колеса 5F управляется в качестве значения, соответствующего целевому углу вращения или целевому углу относительного вращения.
[0050] Модуль 150 управления EPS
Модуль 150 управления EPS выполняет «управление усилением крутящего момента» посредством использования устройства 50 EPS. Более конкретно, модуль 150 управления EPS принимает определенную информацию крутящего момента Ta поворота рулевого управления из датчика 71 крутящего момента. Модуль 150 управления EPS вычисляет вспомогательный крутящий момент на основании крутящего момента Ta поворота рулевого управления и управляет задающим устройством 55 EPS таким образом, что получается вспомогательный крутящий момент.
[0051] Например, модуль 150 управления EPS имеет карту крутящего момента, указывающую взаимосвязь между входным параметром и вспомогательным крутящим моментом. Входной параметр включает в себя крутящий момент Ta поворота рулевого управления, определенный посредством датчика 71 крутящего момента. Входной параметр дополнительно может включать в себя скорость V транспортного средства, определенную посредством датчика 74 скорости транспортного средства. Карта крутящего момента определяется заранее с учетом требуемых характеристик усиления. В ответ на операцию поворота руля 21 водителем, модуль 150 управления EPS обращается к карте крутящего момента, чтобы вычислять вспомогательный крутящий момент согласно входному параметру.
[0052] Затем модуль 150 управления EPS вычисляет целевую команду управления током согласно вспомогательному крутящему моменту и выводит целевую команду управления током в задающее устройство 55 EPS. Задающее устройство 55 EPS приводит в действие (активирует) электромотор 51 в соответствии с целевой командой управления током. Вращательный крутящий момент (т.е. вспомогательный крутящий момент) электромотора 51 передается в зубчатую рейку 25 через механизм 52 преобразования. В результате, поворот переднего колеса 5F усиливается, и в силу этого уменьшается нагрузка по рулению водителя.
[0053] 3. Обработка управления в ходе автономного движения
Далее описана обработка управления в ходе автономного движения. В ходе автономного движения, управляющий объект изменяется с водителя на систему автономного движения (в частности, модуль 190 управления ADS). Согласно настоящему варианту осуществления, соответствующие роли устройства 30 VGRS и устройства 50 EPS надлежащим образом изменяются также в связи с изменением управляющего объекта. Сначала поясняется сравнительный пример для упрощения понимания признаков настоящего варианта осуществления.
[0054] 3-1. Сравнительный пример
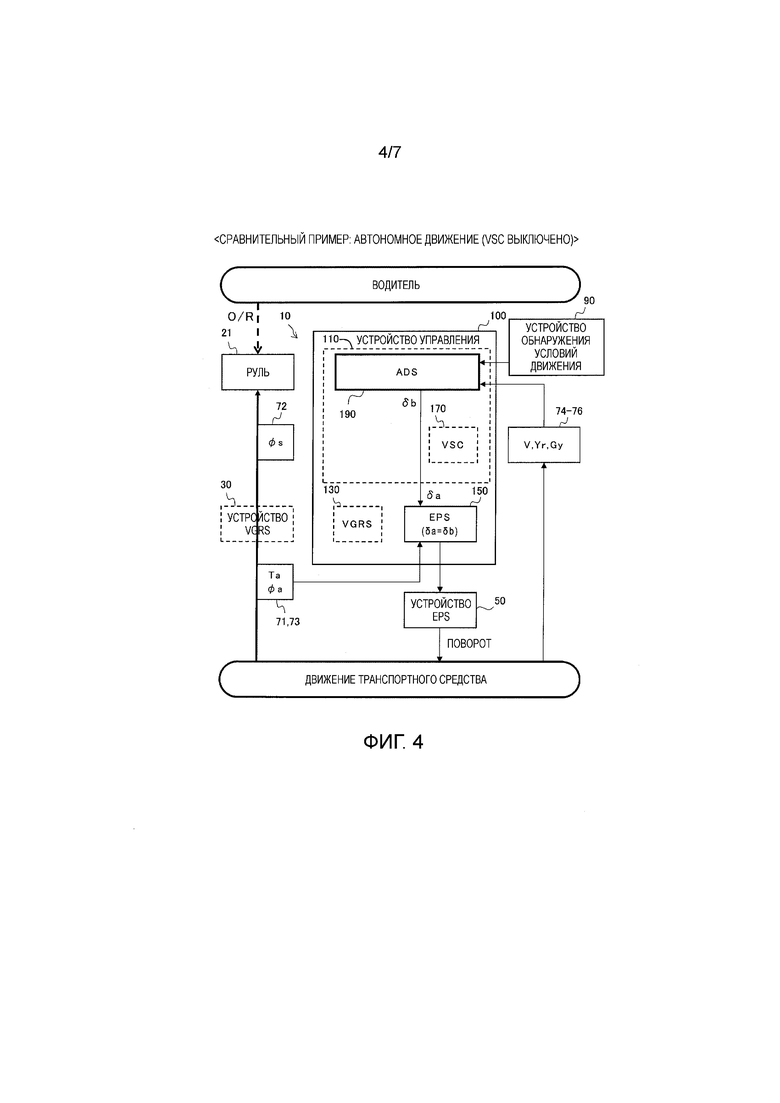
Фиг. 4 является концептуальной схемой, показывающей обработку управления в ходе автономного движения согласно сравнительному примеру. Для простоты, рассмотрим здесь случай, в котором функция модуля 170 управления VSC выключена.
[0055] Модуль 110 вычисления целевого угла поворота рулевого управления
Модуль 110 вычисления целевого угла поворота рулевого управления вычисляет целевой угол δa поворота рулевого управления для переднего колеса 5F в ходе автономного движения. Модуль 110 вычисления целевого угла поворота рулевого управления выводит информацию, указывающую вычисленный целевой угол δa поворота рулевого управления, в модуль 150 управления EPS. Затем модуль 110 вычисления целевого угла поворота рулевого управления инструктирует модулю 150 управления EPS выполнять управление поворотом, которое поворачивает переднее колесо 5F. В настоящем сравнительном примере, модуль 110 вычисления целевого угла поворота рулевого управления включает в себя модуль 190 управления ADS.
[0056] Модуль 190 управления ADS
Модуль 190 управления ADS выполняет управление автономным движением, которое управляет автономным движением транспортного средства 1. Управление автономным движением включает в себя автоматическое ускорение или замедление и автоматическое руление. Здесь внимание конкретно акцентируется на автоматическом рулении. Модуль 190 управления ADS вычисляет целевой угол поворота рулевого управления для переднего колеса 5F, требуемый для автоматического руления. Такой целевой угол поворота рулевого управления, вычисленный посредством модуля 190 управления ADS, в дальнейшем называется «углом δb поворота рулевого управления в ходе автономного движения».
[0057] Более конкретно, модуль 190 управления ADS принимает определенную информацию скорости V транспортного средства, фактической скорости Yr относительно вертикальной оси, фактического поперечного ускорения Gy и т.п. из группы 70 датчиков. Помимо этого, модуль 190 управления ADS принимает информацию условий движения из устройства 90 обнаружения условий движения. Затем на основании определенной информации и информации условий движения, модуль 190 управления ADS создает план движения транспортного средства 1. Типичный пример плана движения, связанного с автоматическим рулением, представляет собой смену полосы движения.
[0058] В качестве примера, модуль 190 управления ADS распознает участок слияния полос движения впереди транспортного средства 1 на основании информации полос движения, включенной в информацию условий движения. В этом случае, модуль 190 управления ADS планирует выполнять смену полосы движения на участке слияния полос движения.
[0059] В качестве другого примера, модуль 190 управления ADS распознает помеху или низкоскоростное транспортное средство, движущееся впереди транспортного средства 1, на основании информации окружающих целей, включенной в информацию условий движения. В этом случае, модуль 190 управления ADS планирует выполнять смену полосы движения для объезда помехи или низкоскоростного транспортного средства.
[0060] В качестве еще одного примера, модуль 190 управления ADS распознает участок проведения дорожных работ впереди транспортного средства 1 на основании обеспечиваемой инфраструктурой информации, включенной в информацию условий движения. В этом случае, модуль 190 управления ADS планирует выполнять смену полосы движения для объезда участка проведения дорожных работ.
[0061] Модуль 190 управления ADS автономно управляет движением транспортного средства 1 согласно плану движения. В частности, при выполнении автоматического руления, модуль 190 управления ADS вычисляет целевую величину состояния транспортного средства 1, требуемую для автоматического руления. Целевая величина состояния может включать в себя не только угол δb поворота рулевого управления в ходе автономного движения, но также и целевую скорость относительно вертикальной оси, целевое поперечное ускорение и т.п. Затем модуль 190 управления ADS выводит информацию, указывающую угол δb поворота рулевого управления в ходе автономного движения, в модуль 150 управления EPS. В настоящем сравнительном примере, угол δb поворота рулевого управления в ходе автономного движения используется в качестве целевого угла δa поворота рулевого управления для переднего колеса 5F (т.е. δa=δb).
[0062] Модуль 150 управления EPS
Модуль 150 управления EPS выполняет «управление поворотом (управление углом поворота рулевого управления)» посредством использования устройства 50 EPS. Таким образом, устройство 50 EPS, которое используется для «управления усилением крутящего момента» в ходе неавтономного движения, используется для «управления поворотом» в ходе автономного движения.
[0063] Более конкретно, модуль 150 управления EPS принимает информацию, указывающую целевой угол δa поворота рулевого управления для переднего колеса 5F, из модуля 110 вычисления целевого угла поворота рулевого управления. Помимо этого, модуль 150 управления EPS принимает определенную информацию угла ϕa вращения из датчика 73 угла вращения. Угол ϕa вращения соответствует фактическому углу поворота рулевого управления для переднего колеса 5F. Следовательно, на основании угла ϕa вращения и целевого угла δa поворота рулевого управления, модуль 150 управления EPS может выполнять управление с обратной связью задающим устройством 55 EPS таким образом, что угол поворота рулевого управления для переднего колеса 5F становится целевым углом δa поворота рулевого управления. Задающее устройство 55 EPS приводит в действие (приводит в действие) электромотор 51 в соответствии с управляющим сигналом из модуля 150 управления EPS. В результате, угол поворота рулевого управления для переднего колеса 5F управляется в качестве целевого угла δa поворота рулевого управления.
[0064] Таким образом, в ходе автономного движения, модуль 150 управления EPS приводит в действие устройство 50 EPS, чтобы поворачивать переднее колесо 5F. Роль устройства 50 EPS изменяется с «усиления крутящего момента» на «поворот» в связи с изменением управляющего объекта с водителя на систему автономного движения.
[0065] 3-2. Структура настоящего варианта осуществления
Относительно автономного движения согласно сравнительному примеру, описанному выше, авторы настоящей заявки выявили следующую проблему. Таким образом, когда устройство 50 EPS быстро поворачивает переднее колесо 5F, руль 21, соединенный с передним колесом 5F, также вращается быстро в сочетании с поворотом переднего колеса 5F. Например, имеется вероятность того, что автоматическое руление выполняется быстро, чтобы немедленно объезжать помеху впереди транспортного средства 1 в ходе автономного движения. В этом случае, руль 21 также вращается быстро в сочетании с быстрым автоматическим рулением. Такой быстрое движение руля 21 в ходе автономного движения не является предпочтительным со следующих точек зрения.
[0066] Во-первых, рассмотрим ситуацию (снятые с руля руки), в которой руки водителя сняты с руля 21 в ходе автономного движения. Когда имеется помеха впереди транспортного средства 1, например, имеется вероятность того, что не только модуль 190 управления ADS, но также и водитель распознает помеху. В этом случае, водитель, ощущающий опасность, может пытаться перехватывать управление одновременно с тем, когда модуль 190 управления ADS выполняет автоматическое руление. Тем не менее, типичное условие для перехвата управления состоит в том, что водитель захватывает руль 21. Следовательно, если руль 21 вращается быстро вследствие автоматического руления, водителю трудно перехватывать управление. Другими словами, быстрое движение руля 21 затрудняет перехват управления для водителя.
[0067] В качестве другого примера, рассмотрим ситуацию (руки на руле), в которой водитель держит руль 21 в ходе автономного движения. Когда руль 21 вращается быстро в этой ситуации, водителю трудно продолжать держать руль 21. В качестве альтернативы, опасно, если руки водителя принудительно перемещаются посредством движения руля 21.
[0068] С учетом вышеизложенного, настоящий вариант осуществления обеспечивает технологию, которая позволяет упрощать захват руля 21 для водителя в ходе автономного движения. Более конкретно, устройство 30 VGRS приводится в действие в таком направлении, чтобы подавлять (ослаблять, уменьшать) движение руля 21, вызываемое посредством вышеописанного управления поворотом. В результате, подавляется быстрое движение руля 21 в ходе автономного движения, что упрощает захват руля для водителя 21. Таким образом, водителю становится проще перехватывать управление. Кроме того, уменьшается риск того, что руки водителя принудительно перемещаются посредством движения руля 21. Далее в данном документе подробнее описаны примеры настоящего варианта осуществления.
[0069] 3-3. Первый пример (VSC выключено)
Фиг. 5 является концептуальной схемой, показывающей первый пример обработки управления в ходе автономного движения согласно настоящему варианту осуществления. В первом примере, для простоты, рассматривается случай, в котором функция модуля 170 управления VSC выключена, как и в случае сравнительного примера, описанного выше.
[0070] Модуль 110 вычисления целевого угла поворота рулевого управления, модуль 190 управления ADS
Модуль 110 вычисления целевого угла поворота рулевого управления является идентичным модулю в сравнительном примере, описанном выше. Модуль 110 вычисления целевого угла поворота рулевого управления вычисляет целевой угол δa поворота рулевого управления для переднего колеса 5F в ходе автономного движения. В данном случае, угол δb поворота рулевого управления в ходе автономного движения, вычисленный посредством модуля 190 управления ADS, используется в качестве целевого угла δa поворота рулевого управления (т.е. δa=δb). Модуль 110 вычисления целевого угла поворота рулевого управления выводит информацию, указывающую целевой угол δa поворота рулевого управления, в модуль 150 управления EPS и модуль 130 управления VGRS.
[0071] Модуль 150 управления EPS
Модуль 150 управления EPS также является идентичным модулю в сравнительном примере, описанном выше. Модуль 150 управления EPS принимает информацию, указывающую целевой угол δa поворота рулевого управления для переднего колеса 5F, из модуля 110 вычисления целевого угла поворота рулевого управления. Затем модуль 150 управления EPS использует устройство 50 EPS, чтобы выполнять управление поворотом на основании целевого угла δa поворота рулевого управления.
[0072] Модуль 130 управления VGRS
Руль 21 вращается в сочетании с вышеописанным управлением поворотом с использованием устройства 50 EPS. Таким образом, угол ϕs поворота руля изменяется. Согласно настоящему варианту осуществления, «управление углом поворота руля» для ослабления такого изменения угла ϕs поворота руля, вызываемого посредством управления поворотом, выполняется наряду с управлением поворотом. При правлении углом поворота руля, используется устройство 30 VGRS. Другими словами, устройство 30 VGRS, которое используется для «управления поворотом» в ходе неавтономного движения, используется для «управления углом поворота руля» в ходе автономного движения.
[0073] Более конкретно, модуль 130 управления VGRS принимает информацию, указывающую целевой угол δa поворота рулевого управления для переднего колеса 5F, из модуля 110 вычисления целевого угла поворота рулевого управления. На основании целевого угла δa поворота рулевого управления, модуль 130 управления VGRS может распознавать направление изменения угла ϕs поворота руля, вызываемого посредством управления поворотом. Модуль 130 управления VGRS приводит в действие устройство 30 VGRS в таком направлении, чтобы подавлять (ослаблять, уменьшать) изменение угла ϕs поворота руля, вызываемое посредством управления поворотом. Таким образом, модуль 130 VGRS-управления управляет задающим VGRS-устройством 35 таким образом, что электромотор 31 вращается в таком направлении, чтобы подавлять изменение угла ϕs поворота руля.
[0074] Направление изменения угла ϕs поворота руля посредством управления углом поворота руля является противоположным направлению изменения угла ϕs поворота руля, вызываемого посредством управления поворотом. Таким образом, направление изменения угла ϕs поворота руля посредством управления углом поворота руля представляет собой направление для противодействия изменению угла ϕs поворота руля, вызываемому посредством управления поворотом. Следовательно, скорость изменения угла ϕs поворота руля, когда управление углом поворота руля выполняется наряду с управлением поворотом, становится ниже скорости изменения, когда управление углом поворота руля не выполняется. Таким образом, быстрое движение руля 21 в ходе автономного движения подавляется. В результате, водителю становится проще захватывать руль 21. Таким образом, водителю становится проще перехватывать управление. Кроме того, уменьшается риск того, что руки водителя принудительно перемещаются посредством движения руля 21.
[0075] На предмет более подробного пояснения, величина изменения (абсолютное значение) угла ϕs поворота руля, вызываемого посредством управления поворотом, далее называется «прогнозируемой величиной θp изменения». Прогнозируемая величина θp изменения может прогнозироваться из целевого угла δa поворота рулевого управления. С другой стороны, величина изменения (абсолютное значение) угла ϕs поворота руля, т.е. величина вращения (абсолютное значение) электромотора 31 посредством управления углом поворота руля, в дальнейшем называется «величиной θc противоположного изменения». Величина θc противоположного изменения, например, определяется как удовлетворяющая условию «θc≤θp».
[0076] Например, модуль 130 управления VGRS имеет карту управления углом поворота руля, указывающую взаимосвязь между целевым углом δa поворота рулевого управления и величиной θc противоположного изменения. Модуль 130 управления VGRS получает величину θc противоположного изменения на основании целевого угла δa поворота рулевого управления и карты управления углом поворота руля. Затем модуль 130 управления VGRS выводит управляющий сигнал, соответствующий величине θc противоположного изменения, в задающее устройство 35 VGRS. Задающее устройство 35 VGRS приводит в действие (активирует) электромотор 31 в соответствии с управляющим сигналом из модуля 130 управления VGRS.
[0077] Когда величина θc противоположного изменения равна прогнозируемой величине θp изменения (т.е. θc=θp), руль 21 практически не вращается. Когда величина θc противоположного изменения меньше прогнозируемой величины θp изменения (т.е. θc<θp), руль 21 вращается незначительно. Когда руль 21 перемещается, водитель может распознавать то, что система автономного движения работает нормально, и в силу этого получать ощущение защищенности.
[0078] Управление углом поворота руля может выполняться, когда прогнозируемая величина θp изменения превышает допустимое значение. В этом случае, величина θc противоположного изменения, например, определяется как удовлетворяющая условию «θp-θc≤допустимое значение». Посредством выполнения управления углом поворота руля с такой величиной θc противоположного изменения, можно подавлять изменение угла ϕs поворота руля ниже определенного уровня.
[0079] Следует отметить, что преимущества могут быть получены по меньшей мере посредством вращения электромотора 31 в таком направлении, чтобы подавлять изменение угла ϕs поворота руля, вызываемое посредством управления поворотом. Преимущества могут получаться, даже когда управление с прямой связью на основании карты управления углом поворота руля выполняется так, как описано выше.
[0080] В качестве альтернативы, управление с обратной связью с использованием определенной информации угла ϕs поворота руля и угла ϕa вращения может выполняться при управлении углом поворота руля. Например, управление углом поворота руля может выполняться таким образом, что угол ϕs поворота руля не изменяется. В качестве другого примера, управление углом поворота руля может выполняться таким образом, что величина изменения угла ϕs поворота руля поддерживается ниже порогового значения. В качестве еще одного другого примера, управление углом поворота руля может выполняться таким образом, что темп изменения угла ϕs поворота руля поддерживается ниже порогового значения. Комбинация управления с прямой связью и управления с обратной связью также является возможной. Управление углом поворота руля согласно настоящему варианту осуществления может быть любым при условии, что оно позволяет вращать электромотор 31 в таком направлении, чтобы подавлять изменение угла ϕs поворота руля, вызываемое посредством управления поворотом.
[0081] 3-4. Второй пример (VSC включено)
Фиг. 6 является концептуальной схемой, показывающей второй пример обработки управления в ходе автономного движения согласно настоящему варианту осуществления. Во втором примере, рассмотрим случай, в котором функция модуля 170 управления VSC включена.
[0082] Модуль 110 вычисления целевого угла поворота рулевого управления, модуль 190 управления ADS, модуль 170 управления VSC
Во втором примере, модуль 110 вычисления целевого угла поворота рулевого управления включает в себя не только модуль 190 управления ADS, но также и модуль 170 управления VSC.
[0083] Модуль 190 управления ADS вычисляет угол δb поворота рулевого управления в ходе автономного движения, требуемый для автоматического руления, как и в случае первого примера, описанного выше. Помимо этого, модуль 190 управления ADS вычисляет целевую величину ST состояния транспортного средства 1, требуемую для автоматического руления. Целевая величина ST состояния включает в себя угол δb поворота рулевого управления в ходе автономного движения, целевую скорость относительно вертикальной оси, целевое поперечное ускорение и т.п. Модуль 190 управления ADS выводит информацию относительно целевой величины ST состояния в модуль 170 управления VSC.
[0084] Модуль 170 управления VSC вычисляет угол δc поворота при контррулении, требуемый для управления стабилизацией транспортного средства, как и в случае неавтономного движения, описанного выше. Тем не менее, в случае автономного движения, модуль 170 управления VSC не использует угол ϕs поворота руля для вычисления угла δc поворота при контррулении. Причина состоит в том, что управляющий объект в ходе автономного движения является не водителем, а системой автономного движения (модулем 190 управления ADS). В ходе автономного движения, угол ϕs поворота руля не обязательно отражает целевую скорость относительно вертикальной оси транспортного средства 1. Например, в результате управления углом поворота руля, описанного выше, угол ϕs поворота руля становится не связанным с целевой скоростью относительно вертикальной оси транспортного средства 1.
[0085] В качестве замены для угла ϕs поворота руля, модуль 170 управления VSC принимает информацию относительно целевой величины ST состояния из модуля 190 управления ADS, представляющего управляющий объект. Затем модуль 170 управления VSC вычисляет угол δc поворота при контррулении на основании целевой величины ST состояния. Например, модуль 170 управления VSC вычисляет целевую скорость относительно вертикальной оси посредством использования угла δb поворота рулевого управления в ходе автономного движения вместо угла ϕs поворота руля. В качестве другого примера, модуль 170 управления VSC может использовать целевую скорость относительно вертикальной оси, включенную в целевую величину ST состояния, как есть. Посредством использования целевой величины ST состояния вместо угла ϕs поворота руля, можно более точно вычислять угол δc поворота при контррулении в ходе автономного движения.
[0086] Таким образом, модуль 110 вычисления целевого угла поворота рулевого управления вычисляет угол δb поворота рулевого управления в ходе автономного движения, требуемый для автоматического руления, и угол δc поворота при контррулении, требуемый для управления стабилизацией транспортного средства. Целевой угол δa поворота рулевого управления для переднего колеса 5F во втором примере является суммой угла δb поворота рулевого управления в ходе автономного движения и угла δc поворота при контррулении (т.е. δa=δb+δc). Модуль 110 вычисления целевого угла поворота рулевого управления вычисляет сумму угла δb поворота рулевого управления в ходе автономного движения и угла δc поворота при контррулении в качестве целевого угла δa поворота рулевого управления. Затем модуль 110 вычисления целевого угла поворота рулевого управления выводит информацию, указывающую вычисленный целевой угол δa поворота рулевого управления, в модуль 150 управления EPS и модуль 130 управления VGRS.
[0087] В качестве альтернативы, модуль 110 вычисления целевого угла поворота рулевого управления может выводить информацию, указывающую как угол δb поворота рулевого управления в ходе автономного движения, так и угол δc поворота при контррулении, в модуль 150 управления EPS и модуль 130 управления VGRS. В этом случае, целевой угол δa поворота рулевого управления вычисляется в каждом из модуля 150 управления EPS и модуля 130 управления VGRS.
[0088] Модуль 150 управления EPS
Модуль 150 управления EPS является идентичным модулю в первом примере, описанном выше. Таким образом, модуль 150 управления EPS использует устройство 50 EPS, чтобы выполнять управление поворотом на основании целевого угла δa поворота рулевого управления.
[0089] Модуль 130 управления VGRS
Модуль 130 управления VGRS является идентичным модулю в первом примере, описанном выше. Таким образом, модуль 130 управления VGRS использует устройство 30 VGRS, чтобы выполнять управление углом поворота руля на основании целевого угла δa поворота рулевого управления.
[0090] В качестве примера модификации, модуль 130 управления VGRS может выполнять управление углом поворота руля посредством использования только угла δc поворота при контррулении в качестве целевого угла δa поворота рулевого управления. Поворот для стабилизации транспортного средства имеет тенденцию быть более быстрым по сравнению с поворотом для автономного движения. Следовательно, даже когда только угол δc поворота при контррулении используется в качестве целевого угла δa поворота рулевого управления при управлении углом поворота руля, быстрое движение руля 21 может подавляться в некоторой степени.
[0091] 3-5. Способ управления автономным движением
Фиг. 7 является блок-схемой последовательности операций способа, обобщенно показывающей способ управления автономным движением согласно настоящему варианту осуществления.
[0092] Этап S1.
Устройство 100 управления вычисляет целевой угол δa поворота рулевого управления для переднего колеса 5F в ходе автономного движения.
[0093] Этап S2.
Устройство 100 управления использует устройство 50 EPS, чтобы выполнять управление поворотом на основании целевого угла δa поворота рулевого управления. Более конкретно, устройство 100 управления приводит в действие устройство 50 EPS таким образом, что угол поворота рулевого управления для переднего колеса 5F становится целевым углом δa поворота рулевого управления.
[0094] Этап S3.
Устройство 100 управления выполняет управление углом поворота руля в сочетании с управлением поворотом. устройство 30 VGRS используется для управления углом поворота руля. Более конкретно, на основании целевого угла δa поворота рулевого управления, устройство 100 управления приводит в действие устройство 30 VGRS в таком направлении, чтобы подавлять изменение угла ϕs поворота руля, вызываемое посредством управления поворотом.
[0095] 4. Преимущества
В ходе автономного движения, управляющий объект изменяется с водителя на систему автономного движения. Согласно настоящему варианту осуществления, соответствующие роли устройства 30 VGRS и устройства 50 EPS надлежащим образом изменяются также в связи с изменением управляющего объекта.
[0096] Более конкретно, устройство 50 EPS, которое используется для «управления усилением крутящего момента» в ходе неавтономного движения, используется для «управления поворотом» в ходе автономного движения. Кроме того, устройство 30 VGRS, которое используется для «управления поворотом» в ходе неавтономного движения, используется для «управления углом поворота руля» в ходе автономного движения. В результате, подавляется быстрое движение руля 21 в ходе автономного движения, что упрощает захват руля для водителя 21. Таким образом, водителю становится проще перехватывать управление. Кроме того, уменьшается риск того, что руки водителя принудительно перемещаются посредством движения руля 21.
[0097] Можно сказать, что настоящий вариант осуществления предлагает новый закон управления, подходящий для автономного движения. Вследствие нового закона управления, автономное движение становится более комфортным для водителя. Это способствует повышению доверия водителя к системе автономного движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВЕДЕНИЕМ В ДВИЖЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2557132C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2633023C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ | 2020 |
|
RU2731400C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582517C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2533854C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2643748C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2623359C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2503559C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2571679C1 |
Устройство управления движением транспортного средства содержит устройство (50) электроусилителя руля, поворачивающее колесо (5F) транспортного средства (1), устройство (30) рулевого управления с переменным передаточным отношением, способное изменять отношение угла поворота руля (21) и угла поворота рулевого управления для колеса (5F), и устройство управления (10), выполняющее управление автономным движением, которое управляет автономным движением транспортного средства (1). Управление автономным движением содержит: обработку вычисления целевого угла поворота рулевого управления, которая вычисляет целевой угол поворота рулевого управления для колеса (5F); управление поворотом, которое приводит в действие устройство (50) электроусилителя руля для поворота колеса (5F) таким образом, что угол поворота рулевого управления для колеса (5F) становится целевым углом поворота рулевого управления; и управление углом поворота руля (21), которое приводит в действие, на основании целевого угла поворота рулевого управления, устройство (30) рулевого управления с переменным передаточным отношением в таком направлении, чтобы подавлять изменение угла поворота руля (21), вызываемое посредством управления поворотом. Предложен также способ управления автономным движением транспортного средства. Достигается создание технологии, которая облегчает захват руля для водителя в ходе автономного движения транспортного средства. 2 н. и 2 з.п. ф-лы, 7 ил.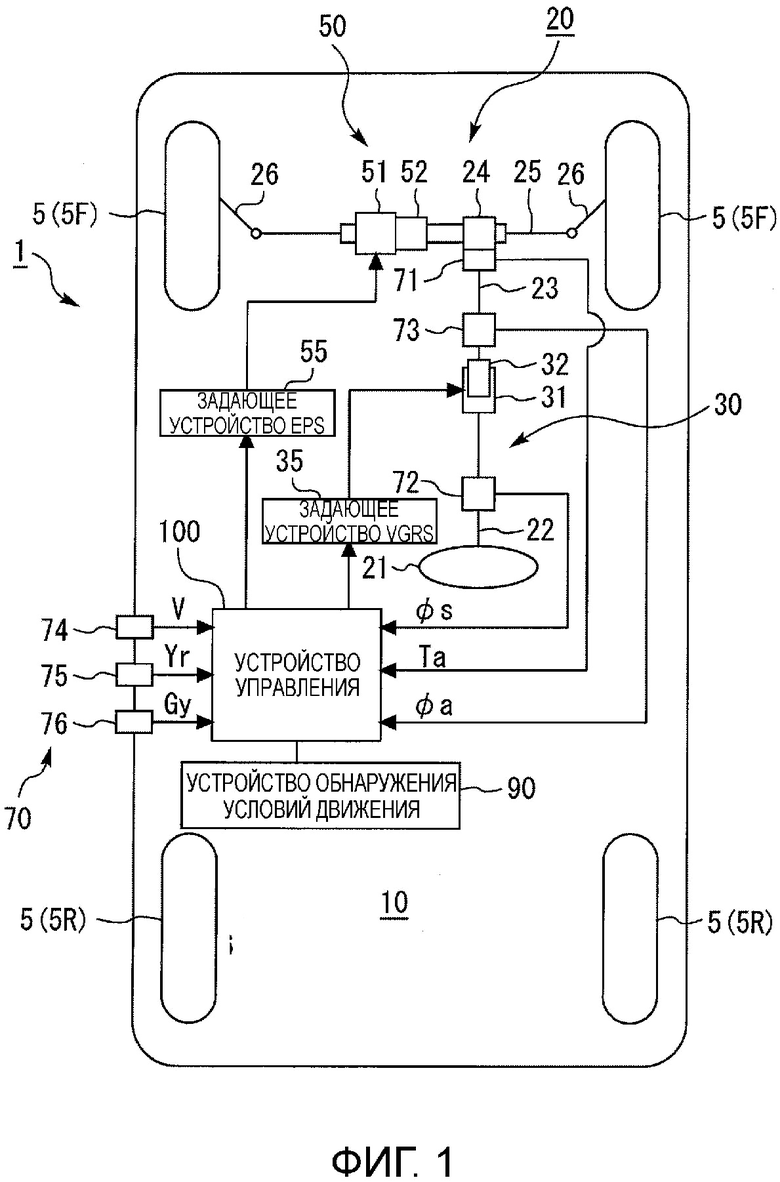
1. Устройство управления движением транспортного средства, содержащее:
- устройство электроусилителя руля, поворачивающее колесо транспортного средства;
- устройство рулевого управления с переменным передаточным отношением, способное изменять отношение угла поворота руля и угла поворота рулевого управления для колеса; и
- устройство управления, выполняющее управление автономным движением, которое управляет автономным движением транспортного средства, при этом:
- управление автономным движением содержит:
- обработку вычисления целевого угла поворота рулевого управления, которая вычисляет целевой угол поворота рулевого управления для колеса;
- управление поворотом, которое приводит в действие устройство электроусилителя руля для поворота колеса таким образом, что угол поворота рулевого управления для колеса становится целевым углом поворота рулевого управления; и
- управление углом поворота руля, которое приводит в действие, на основании целевого угла поворота рулевого управления, устройство рулевого управления с переменным передаточным отношением в таком направлении, чтобы подавлять изменение угла поворота руля, вызываемое посредством управления поворотом.
2. Устройство управления движением транспортного средства по п. 1, в котором:
- обработка вычисления целевого угла поворота рулевого управления содержит:
- первую обработку, которая вычисляет угол поворота рулевого управления в ходе автономного движения, требуемый для автоматического руления при автономном движении; и
- вторую обработку, которая вычисляет угол поворота при контррулении, требуемый для управления стабилизацией транспортного средства, при этом:
- целевой угол поворота рулевого управления является суммой угла поворота рулевого управления в ходе автономного движения и угла поворота при контррулении.
3. Устройство управления движением транспортного средства по п. 2, в котором:
- первая обработка дополнительно вычисляет целевую величину состояния транспортного средства, требуемую для автоматического руления, и
- вторая обработка вычисляет угол поворота при контррулении на основании целевой величины состояния без использования угла поворота руля.
4. Способ управления автономным движением для управления автономным движением транспортного средства,
- причем транспортное средство содержит:
- устройство электроусилителя руля, поворачивающее колесо транспортного средства; и
- устройство рулевого управления с переменным передаточным отношением, допускающее изменение отношения угла поворота руля и угла поворота рулевого управления для колеса,
- при этом способ управления автономным движением содержит этапы, на которых:
- вычисляют целевой угол поворота рулевого управления колеса;
- приводят в действие устройство электроусилителя руля для поворота колеса таким образом, что угол поворота рулевого управления колеса становится целевым углом поворота при рулении; и
- приводят в действие, на основании целевого угла поворота рулевого управления, устройство рулевого управления с переменным передаточным отношением в таком направлении, чтобы подавлять изменение угла поворота руля, вызываемое посредством поворота колеса.
| СПОСОБ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОЙ УСТАНОВКИ ПОЕЗДА С РАСПРЕДЕЛЕННОЙ МОЩНОСТЬЮ | 2007 |
|
RU2463178C2 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

