Изобретение относится к области распознавания оптических изображений и может быть использовано при построении систем технического зрения различного назначения.
Существуют способы цифровой обработки изображений [см., например, 1-7], основанные на формальном математическом описании множества характерных достаточных признаков объектов, создании и постоянном обновлении баз данных яркостно-геометрических моделей объектов или их шаблонов, учитывающих условия съемки и полную совокупность факторов, влияющих на качество формирования изображений, обнаружении объектов путем формирования совокупности критериев наличия характерных признаков объекта на изображении. Общими недостатками способов являются: наличие большого объема информации, сложность и трудоемкость вычислений математических моделей, что приводит к увеличению времени, необходимого для обнаружения объектов на изображениях реальных сцен при их реализации.
Для обнаружения малоразмерных объектов при обработке последовательности изображений существуют способы [см., например, 6-11], основанные использовании разностного или оценочно-компенсационного алгоритмов обработки изображений. Однако, общим недостатком, снижающим эффективность их применения, является высокая чувствительность к незначительных относительным сдвигам изображений, составляющих 1…2 элемента разрешения.
Наиболее близким по технической сущности и достигаемому результату является способ обнаружения малоразмерных объектов на изображении [см., например, 12], основанный на использовании вейвлет-преобразований текущего и эталонного изображений. Недостатком способа является уменьшение вероятности обнаружения малоразмерных объектов, обусловленной отсутствием корректного учета шумовой составляющей выходного сигнала оптико-электронного средства (ОЭС) построения изображения и эмпирическим выбором уровня порога обнаружения.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение эффективности обнаружения малоразмерных объектов на изображениях.
Технический результат достигается тем, что в известном способе обнаружения малоразмерных объектов на изображениях, основанном на формировании матриц эталонного изображения A и s-го кадра анализируемого изображения, где  - порядковый номер кадра анализируемого изображения B, S - общее число кадров анализируемого изображения B, осуществляют последовательные разложения матриц эталонного A и s-го кадра анализируемого B изображений до k-го уровня в соответствии с операциями:
- порядковый номер кадра анализируемого изображения B, S - общее число кадров анализируемого изображения B, осуществляют последовательные разложения матриц эталонного A и s-го кадра анализируемого B изображений до k-го уровня в соответствии с операциями:
где ⊗ - операция свертки матрицы и вектора-строки; T - операция транспонирования матрицы; k - номер шага вейвлет-преобразования;  К - заданное число шагов вейвлет-преобразования;
К - заданное число шагов вейвлет-преобразования;  и
и  - матрицы коэффициентов аппроксимации анализируемого B и эталонного A изображений;
- матрицы коэффициентов аппроксимации анализируемого B и эталонного A изображений;  и
и  - матрицы коэффициентов детализации анализируемого B и эталонного A изображений по горизонтали;
- матрицы коэффициентов детализации анализируемого B и эталонного A изображений по горизонтали;  и
и  - матрицы коэффициентов детализации анализируемого B и эталонного A изображений по вертикали;
- матрицы коэффициентов детализации анализируемого B и эталонного A изображений по вертикали;  и
и  - матрицы коэффициентов детализации анализируемого B и эталонного A изображений по диагонали; g - вектор-строка коэффициентов низкочастотного фильтра вейвлета; h - вектор-строка коэффициентов высокочастотного фильтра вейвлета, формируют суммарно-разностную матрицу D0S как:
- матрицы коэффициентов детализации анализируемого B и эталонного A изображений по диагонали; g - вектор-строка коэффициентов низкочастотного фильтра вейвлета; h - вектор-строка коэффициентов высокочастотного фильтра вейвлета, формируют суммарно-разностную матрицу D0S как:

рассчитывают нормированную матрицу DS:
где i, j - номера элемента разрешения с максимальным значением параметра по строке и столбцу соответственно, 
 I, J - общее число элементов разрешения по горизонтали и вертикали соответственно, формируют по числу кадров S суммарную матрицу DΣ:
I, J - общее число элементов разрешения по горизонтали и вертикали соответственно, формируют по числу кадров S суммарную матрицу DΣ:
преобразуют матрицу DΣ в бинарную матрицу Е0:
где λ - порог бинаризации, определяют количество локальных областей N на бинарной матрице Е0 и сравнивают с Nзад, где Nзад - заданное количество локальных областей, если N≤Nзад, то вычисляют координаты центров тяжести каждой локальной области, если N>Nзад, то повышают последовательно с шагом Δλ порог бинаризации λ до выполнения условия N>Nзад и выполняют процедуру определения координат центров тяжести каждой локальной области.
Сущность предлагаемого способа заключается в обнаружении малоразмерных объектов на изображениях на основе сравнительного анализа детализирующих вейвлет-коэффициентов текущего и эталонного изображений, суммарно-разностной обработкой горизонтальных, вертикальных и диагональных вейвлет-коэффициентов на заданных уровнях разложения с последующей нормировкой, накопления нормированных псевдоизображений с последующей их бинаризацией по адаптивно устанавливаемому порогу.
Локальный характер малоразмерных объектов поиска требует проведения детального анализа изображений, который может быть выполнен с помощью современных методов цифровой обработки сигналов, основанных на использовании вейвлет-преобразований, существенным достоинством которых является возможность проведения локального спектрального анализа изображений, благодаря пространственной локализации базисных вейвлет-функций. Способ с применением вейвлет-преобразований для решения задачи локализации малоразмерных объектов на изображениях фоноцелевой обстановки, получаемых в динамических условиях наблюдения при наличии случайных пространственных сдвигов [см., например, 12] устойчив к ошибкам привязки текущего и эталонного изображений и сохраняет свою работоспособность при СКО сдвигов текущего изображения относительно эталонного в два раза больше линейных размеров объекта поиска. Вместе с тем данный способ не учитывал шумы приемника ОЭС, а порог обнаружения выбирался эмпирически.
В реальных условиях при обработке изображений будут присутствовать ошибки совмещения текущего и эталонного изображений, обусловленные преимущественно аддитивными сдвигами изображений друг относительно друга по горизонтальной и вертикальной осям. Кроме того, текущее изображение будет искажено шумами приемника ОЭС. Обнаружение локальных малоразмерных объектов в этих условиях можно существенно упростить путем решения задачи субпиксельной локализации объектов и снижение влияния возникающих при ее решении нормальных и аномальных ошибок в условиях недостаточности априорных сведений о характеристиках объектов.
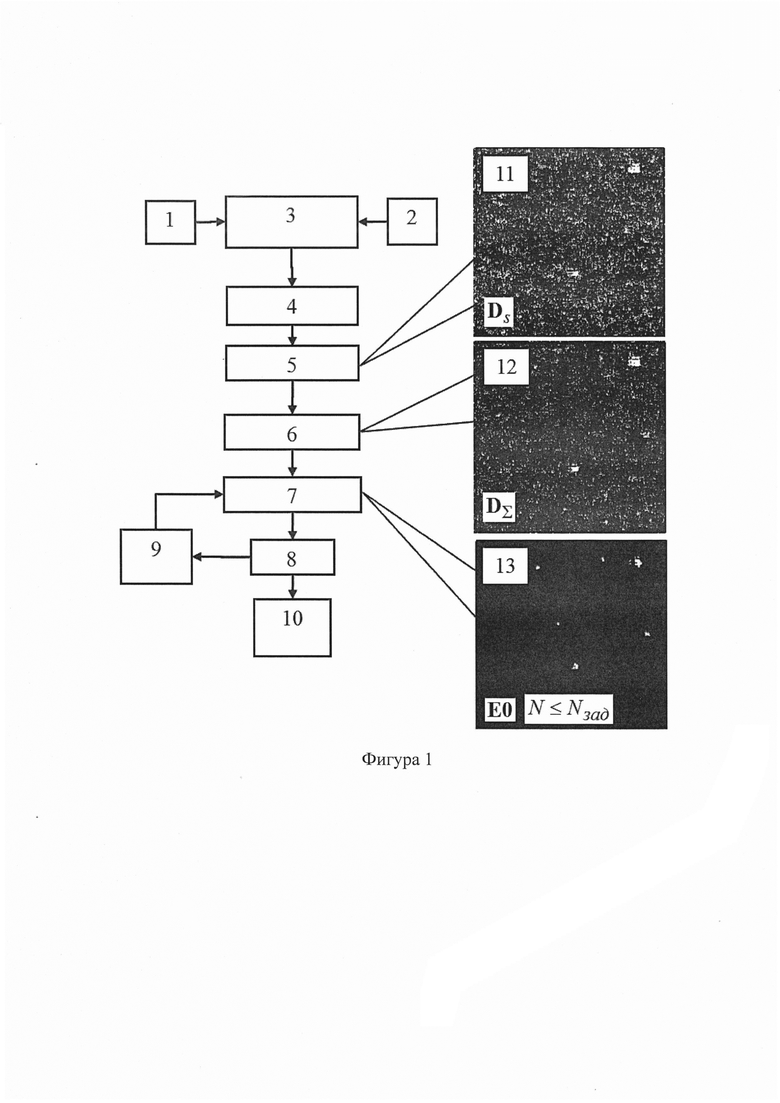
Заявленный способ поясняется схемой, представленной на фигуре 1, где приняты следующие обозначения: 1 - матрица эталонного изображения B; 2 - матрица анализируемого кадра изображения A; 3 - блок вейвлет-преобразований матриц изображений B и A; 4 - блок формирования суммарно-разностной матрицы D0S по одному кадру; 5 - блок формирования нормированной матрицы DS по одному кадру; 6 - блок накопления и формирования суммарной матрицы DΣ; 7 - блок формирования бинарной матрицы Е0; 8 - блок определения количества N изображений локальных областей на матрице Е0 и сравнения с Nзад; 9 - блок формирования порога λ; 10 - блок вычисления координат изображений локальных областей; 11 - изображение матрицы D0S; 12 - изображение матрицы DΣ; 13 - изображение матрицы Е0.
S-ый кадр ( S - общее число кадров) анализируемого изображения B и эталонного изображения A поступают в блок вейвлет-преобразований матриц изображений A и B 3, где осуществляется последовательные разложения матриц 1, 2 эталонного D и s-го кадра анализируемого A изображений до k-го уровня в соответствии с операциями:
S - общее число кадров) анализируемого изображения B и эталонного изображения A поступают в блок вейвлет-преобразований матриц изображений A и B 3, где осуществляется последовательные разложения матриц 1, 2 эталонного D и s-го кадра анализируемого A изображений до k-го уровня в соответствии с операциями:
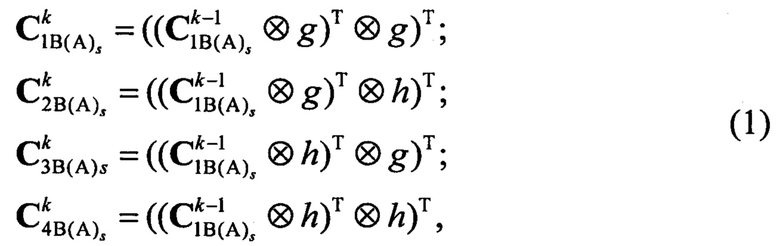
где ⊗ - операция свертки матрицы и вектора-строки; T - операция транспонирования матрицы; k - номер шага вейвлет-преобразования;  К - заданное число шагов вейвлет-преобразования;
К - заданное число шагов вейвлет-преобразования;  и
и  - матрицы коэффициентов аппроксимации анализируемого B и эталонного A изображений;
- матрицы коэффициентов аппроксимации анализируемого B и эталонного A изображений;  и
и  - матрицы коэффициентов детализации анализируемого B и эталонного A изображений по горизонтали;
- матрицы коэффициентов детализации анализируемого B и эталонного A изображений по горизонтали;  и
и  - матрицы коэффициентов детализации анализируемого B и эталонного A изображений по вертикали;
- матрицы коэффициентов детализации анализируемого B и эталонного A изображений по вертикали;  и
и  - матрицы коэффициентов детализации анализируемого B и эталонного A изображений по диагонали; g - вектор-строка коэффициентов низкочастотного фильтра вейвлета; h - вектор-строка коэффициентов высокочастотного фильтра вейвлета.
- матрицы коэффициентов детализации анализируемого B и эталонного A изображений по диагонали; g - вектор-строка коэффициентов низкочастотного фильтра вейвлета; h - вектор-строка коэффициентов высокочастотного фильтра вейвлета.
Результат преобразования (1) поступает в блок формирования суммарно-разностной матрицы D0S 4, где формируется суммарно-разностная матрица D0S. как

которая приводится в блоке формирования нормированной матрицы DS 5 к нормируемому виду (изображение 11):

где i, j - номера элемента разрешения с максимальным значением параметра по горизонтали (по строке) и вертикали (по столбцу), 
 I, J - общее число элементов разрешения по строке и столбцу соответственно. В блоке накопления и формирования суммарной матрицы DΣ 6 для повышения уровня различимости малоразмерных объектов производится накопление матриц DS по заданному числу S кадров анализируемого изображения B (изображение 12)
I, J - общее число элементов разрешения по строке и столбцу соответственно. В блоке накопления и формирования суммарной матрицы DΣ 6 для повышения уровня различимости малоразмерных объектов производится накопление матриц DS по заданному числу S кадров анализируемого изображения B (изображение 12)

В блоке формирования бинарной матрицы Е0 7 формируют бинарную матрицу Е0 (изображение 13), используя правило

где λ - порог бинаризации.
В блоке определения количества N изображений локальных областей на матрице Е0 и сравнения с Nзад 8 осуществляется подсчет количества изображений локальных областей, включающих соответственно изображения малоразмерных объектов. Для исключения влияния шумов приемника ОЭС (формирующего изображение) наличия помех, масштабных и проекционных искажений текущего изображения увеличивают порог бинаризации. Поэтому в блоке блок формирования порога λ 9 выполняется ступенчатое повышение порога λ с заданным шагом Δλ до тех пор, пока количество локальных областей не будет превышать их заданного значения: N≤Nзад. После выполнения условия N≤Nзад в блоке вычисления координат изображений локальных областей 10 осуществляется вычисление координат центров тяжести (хn, yn) (n - номер локальной области,  ) малоразмерных объектов на анализируемом изображении, например:
) малоразмерных объектов на анализируемом изображении, например:
где mn - длина n-ой локальной области по координате x; dn - номер первого элемента n-ой локальной области по координате х; wn - длина n-ой локальной области по координате y; gn - номер первого элемента n-ой локальной области по координате y.
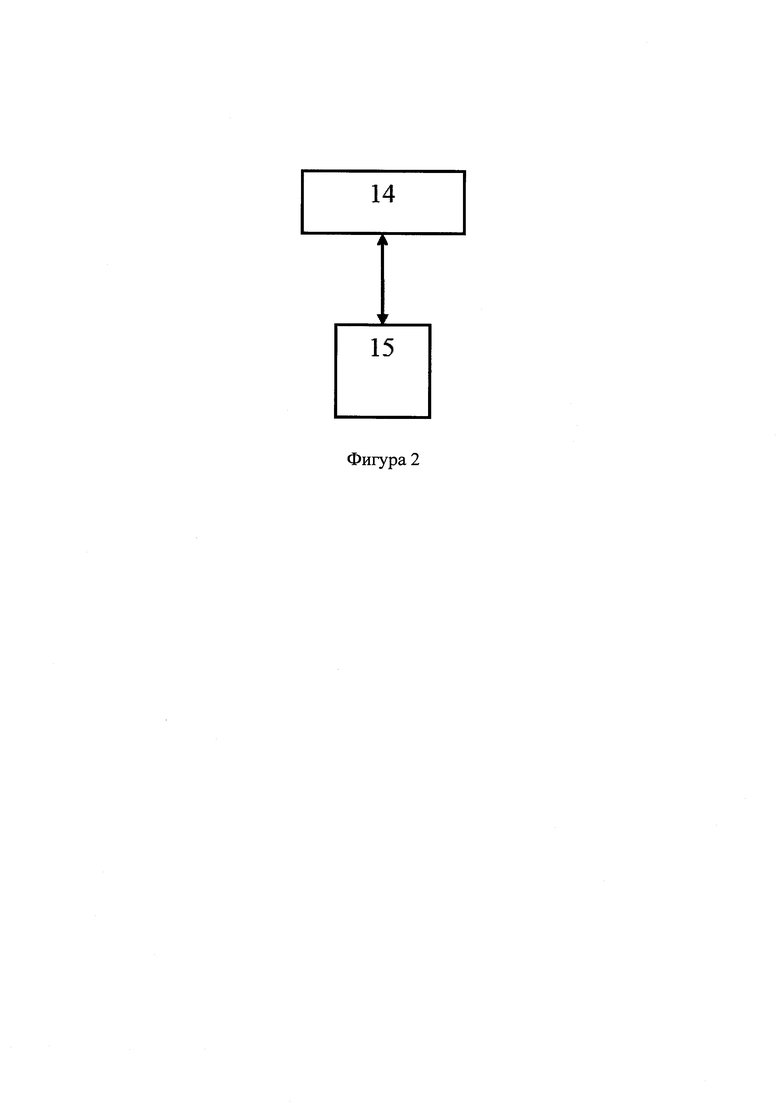
На фигуре 2 изображена блок схема устройства, реализующего способ. Блок - схема включает: ОЭС матричного типа 14; микропроцессор 15.
Устройство работает следующим образом. ОЭС матричного типа 14 формирует изображение, параметры которого поступают в микропроцессор 15. Микропроцессор 15, осуществляет необходимые вычислительные операции.
Таким образом, у заявляемого способа появляются свойства повышения эффективности обнаружения малоразмерных объектов на изображениях за счет упрощения алгоритмов обработки изображений и использования адаптивного порога для локализации малоразмерных объектов на изображении. Тем самым, предлагаемый авторами способ устраняет недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ обнаружения малоразмерных объектов на изображениях, основанный на формировании матриц эталонного изображения A и s-го кадра анализируемого изображения B, где  - порядковый номер кадра анализируемого изображения B, S - общее число кадров анализируемого изображения B, осуществлении последовательного разложения матриц эталонного A и s-го кадра анализируемого B изображений до k-го уровня в соответствии с операциями:
- порядковый номер кадра анализируемого изображения B, S - общее число кадров анализируемого изображения B, осуществлении последовательного разложения матриц эталонного A и s-го кадра анализируемого B изображений до k-го уровня в соответствии с операциями:
где ⊗ - операция свертки матрицы и вектора-строки; T - операция транспонирования матрицы; k - номер шага вейвлет-преобразования;  К - заданное число шагов вейвлет-преобразования;
К - заданное число шагов вейвлет-преобразования;  и
и  - матрицы коэффициентов аппроксимации анализируемого B и эталонного A изображений;
- матрицы коэффициентов аппроксимации анализируемого B и эталонного A изображений;  и
и - матрицы коэффициентов детализации анализируемого B и эталонного A изображений по горизонтали;
- матрицы коэффициентов детализации анализируемого B и эталонного A изображений по горизонтали;  и
и  - матрицы коэффициентов детализации анализируемого B и эталонного A изображений по вертикали;
- матрицы коэффициентов детализации анализируемого B и эталонного A изображений по вертикали;  и
и  - матрицы коэффициентов детализации анализируемого B и эталонного A изображений по диагонали; g - вектор-строка коэффициентов низкочастотного фильтра вейвлета; h - вектор-строка коэффициентов высокочастотного фильтра вейвлета, формировании суммарно-разностной матрицы D0S как:
- матрицы коэффициентов детализации анализируемого B и эталонного A изображений по диагонали; g - вектор-строка коэффициентов низкочастотного фильтра вейвлета; h - вектор-строка коэффициентов высокочастотного фильтра вейвлета, формировании суммарно-разностной матрицы D0S как:

расчете нормированной матрицы DS:
где i, j - номера элемента разрешения с максимальным значением параметра по строке и столбцу соответственно, 
 I, J - общее число элементов разрешения по горизонтали и вертикали соответственно, формировании по числу кадров S суммарной матрицы DΣ:
I, J - общее число элементов разрешения по горизонтали и вертикали соответственно, формировании по числу кадров S суммарной матрицы DΣ:
преобразовании матрицы DΣ в бинарную матрицу Е0:
где λ - порог бинаризации, определении количества локальных областей N на бинарной матрице Е0 и сравнении с Nзад, где Nзад - заданное количество локальных областей, вычислении при N≤Nзад координат центров тяжести каждой локальной области, последовательном повышении при N>Nзад с шагом Δλ порога бинаризации λ до выполнения условия N>Nзад и выполнении процедуры определения координат центров тяжести каждой локальной области.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые электронные узлы и оптико-электронные элементы.
1. Вудс Р., Гонсалес Р. Цифровая обработка изображений / Р. Гонсалес, Р. Вудс. - М.: Техносфера, 2005. - 1072 с.
2. Визильтер Ю.В., Желтов С.Ю. Проблемы технического зрения в современных авиационных системах // Техническое зрение в системах управления мобильными объектами-2010: Труды научно-технической конференции-семинара. Вып. 4 / Под ред. P.P. Назирова. - М.: КДУ. - 2011. - С. 11-44.
3. Журавлев Ю.И., Рязанов В.В., Сенько О.В. «Распознавание». Математические методы. Программная система. Практические применения / Ю.И. Журавлев, В.В. Рязанов, О.В. Сенько. - М.: Фазис, 2006. - 176 с.
4. Сойфер В.А. Методы компьютерной обработки изображений / В.А. Сойфер. - М.: Физматлит, 2004. - 784 с.
5. Грузман И.С., Киричук B.C., Косых В.П., Перетягин Г.И., Спектор А.А. Цифровая обработка изображений в информационных системах / И.С. Грузман, B.C. Киричук, В.П. Косых, Г.И. Перетягин, А.А. Спектор. - Новосибирск: Изд-во НГТУ, 2002. - 352 с.
6. Прэтт У. Цифровая обработка изображений. В 2-х кн. / У Прэтт. - М.: Мир, 1982. - 790 с.
7. Алпатов, Б.А., Бабаян П.В., Балашов О.Е., Степашкин А.И. Методы автоматического обнаружения и сопровождения объектов. Обработка изображений и управление / Б.А. Алпатов, П.В. Бабаян, О.Е. Балашов, А.И. Степашкин. - М.: Радиотехника, 2008. - 176 с.
8. Иванов В.А. Киричук B.C., Орлов С.И. Пространственно-временной анализ видеопоследовательностей для обнаружения оставленных предметов / В.А Иванов, B.C. Киричук, С.И. Орлов // Автометрия. - 2011. - Т. 47. - №1. - С. 30-36.
9. Barros, R. Background recovering in outdoor image sequences / R. Barros, P.J. Figueroa, N.J. Leite // Image and Vision Computing. - 2006. - N 4. - P. 363-374.
10. Elhabian, S. Moving object detection in spatial domain using background removal techniques - State-of-Art / S. Elhabian, K. El-Sayed, S. Ahmed // Recent Patents on Computer Sci. - 2008. - N 1. - P. 32-54.
11. Козирацкий Ю.Л., Козирацкий А.Ю., Тимохин B.H. Оценочно-компенсационный алгоритм выделения кратковременно существующих изображений матричными приемниками / Ю.Л., Козирацкий, А.Ю. Козирацкий, В.Н. Тимохин // Радиотехника. - 2004. - №5. - С. 39-42.
12. Донцов А.А., Козирацкий, Ю.Л. Алгоритм локализации малоразмерных объектов на изображении с использованием вейвлет-преобразований / А.А.Донцов, Ю.Л., Козирацкий // Автометрия. - 2013. - Т. 49 - №2. - С. 42-48.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И АВТОСОПРОВОЖДЕНИЯ ОБЪЕКТОВ ЦЕЛЕУКАЗАНИЯ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2748763C1 |
| Способ оптического обнаружения слабоконтрастных динамических объектов на сложном атмосферном фоне | 2015 |
|
RU2634374C2 |
| СПОСОБ ОБРАБОТКИ МАТРИЦЫ ЧИСЕЛ | 2017 |
|
RU2661793C1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ ВЫСОКОДЕТАЛИЗИРОВАННЫХ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ СЦЕНЫ | 2013 |
|
RU2542876C2 |
| Способ обработки изображений покрытых битумом образцов щебня для определения адгезии | 2022 |
|
RU2801526C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ КООРДИНАТНЫХ СМЕЩЕНИЙ ОБЪЕКТА СЛЕЖЕНИЯ В ПОСЛЕДОВАТЕЛЬНОСТИ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2460135C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ ТАНКЕРА И ОЦЕНИВАНИЯ ЕГО ТРАЕКТОРНЫХ ПАРАМЕТРОВ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ НА ФОНЕ ЗВЕЗДНОГО НЕБА | 2016 |
|
RU2624828C1 |
| СПОСОБ РАСПОЗНАВАНИЯ И КЛАССИФИКАЦИИ ФОРМЫ ОБЪЕКТОВ В ЛАБИРИНТНЫХ ДОМЕННЫХ СТРУКТУРАХ | 2012 |
|
RU2522869C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ БОЕПРИПАСОМ ОПТИЧЕСКОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИК-ПРИЕМНИКОМ | 2023 |
|
RU2822973C1 |
Изобретение относится к области распознавания оптических изображений. Технический результат заключается в повышении эффективности обнаружения малоразмерных объектов на изображениях. Сущность предлагаемого способа заключается в обнаружении малоразмерных объектов на изображениях на основе сравнительного анализа детализирующих вейвлет-коэффициентов текущего и эталонного изображений, суммарно-разностной обработкой горизонтальных, вертикальных и диагональных вейвлет-коэффициентов на заданных уровнях разложения с последующей нормировкой, накопления нормированных псевдоизображений с последующей их бинаризацией по адаптивно устанавливаемому порогу. 2 ил.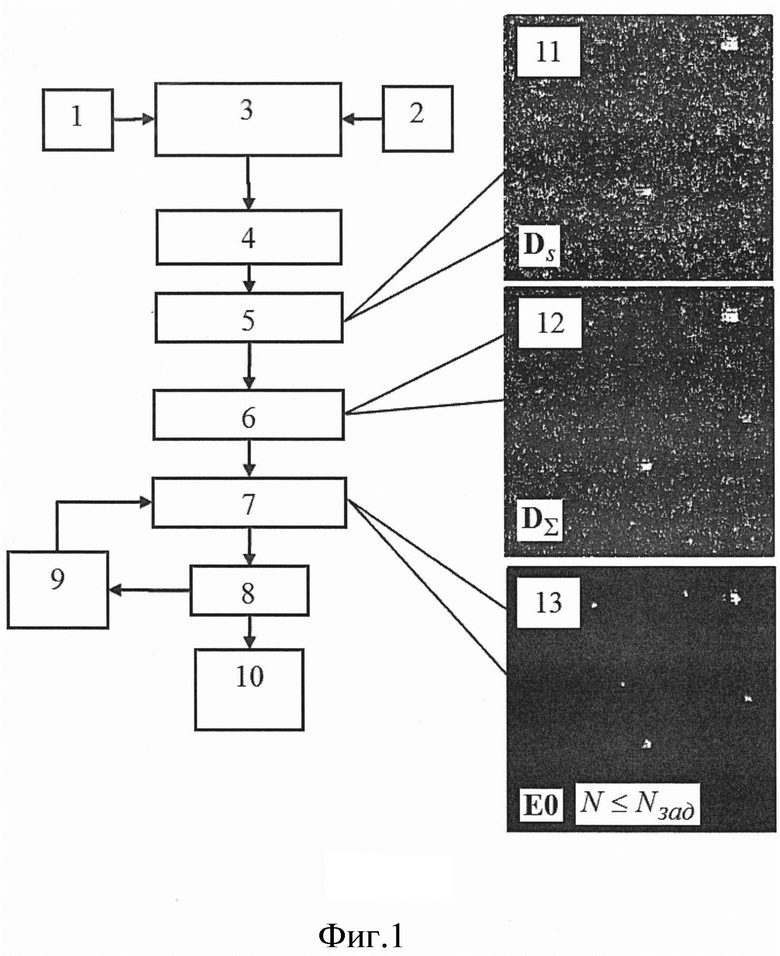
Способ обнаружения малоразмерных объектов на изображениях, основанный на формировании матриц эталонного изображения A и s-го кадра анализируемого изображения B, где  - порядковый номер кадра анализируемого изображения B, S - общее число кадров анализируемого изображения B, отличающийся тем, что осуществляют последовательные разложения матриц эталонного A и s-го кадра анализируемого B изображений до k-го уровня в соответствии с операциями:
- порядковый номер кадра анализируемого изображения B, S - общее число кадров анализируемого изображения B, отличающийся тем, что осуществляют последовательные разложения матриц эталонного A и s-го кадра анализируемого B изображений до k-го уровня в соответствии с операциями:
где ⊗ - операция свертки матрицы и вектора-строки; T - операция транспонирования матрицы; k - номер шага вейвлет-преобразования;  К - заданное число шагов вейвлет-преобразования;
К - заданное число шагов вейвлет-преобразования;  и
и  - матрицы коэффициентов аппроксимации анализируемого B и эталонного A изображений;
- матрицы коэффициентов аппроксимации анализируемого B и эталонного A изображений;  и
и  - матрицы коэффициентов детализации анализируемого B и эталонного A изображений по горизонтали;
- матрицы коэффициентов детализации анализируемого B и эталонного A изображений по горизонтали;  и
и  - матрицы коэффициентов детализации анализируемого B и эталонного A изображений по вертикали;
- матрицы коэффициентов детализации анализируемого B и эталонного A изображений по вертикали;  и
и  - матрицы коэффициентов детализации анализируемого B и эталонного A изображений по диагонали; g - вектор-строка коэффициентов низкочастотного фильтра вейвлета; h - вектор-строка коэффициентов высокочастотного фильтра вейвлета, формируют суммарно-разностную матрицу D0S как:
- матрицы коэффициентов детализации анализируемого B и эталонного A изображений по диагонали; g - вектор-строка коэффициентов низкочастотного фильтра вейвлета; h - вектор-строка коэффициентов высокочастотного фильтра вейвлета, формируют суммарно-разностную матрицу D0S как:

рассчитывают нормированную матрицу DS:
где i, j - номера элемента разрешения с максимальным значением параметра по строке и столбцу соответственно, 
 I, J - общее число элементов разрешения по горизонтали и вертикали соответственно, формируют по числу кадров S суммарную матрицу DΣ:
I, J - общее число элементов разрешения по горизонтали и вертикали соответственно, формируют по числу кадров S суммарную матрицу DΣ:
преобразуют матрицу DΣ в бинарную матрицу Е0:
где λ - порог бинаризации, определяют количество локальных областей N на бинарной матрице Е0 и сравнивают с Nзад, где Nзад - заданное количество локальных областей, если N≤Nзад, то вычисляют координаты центров тяжести каждой локальной области, если N>Nзад, то повышают последовательно с шагом Δλ порог бинаризации λ до выполнения условия N>Nзад выполняют процедуру определения координат центров тяжести каждой локальной области.
| А.А | |||
| Донцов и др | |||
| "Алгоритм локализации малоразмерных объектов на изображении с использованием вейвлет-преобразований", Автометрия (2013 год, номер 2), опубл | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Aju John et al | |||
| "Object | |||

