Область техники
Изобретение относится к области систем самонаведения, в частности к способам наведения носителя на цель оптической головкой самонаведения (ОГС).
Предшествующий уровень техники
Известен способ, описанный в патенте RU №2603235 «способ обнаружения и высокоточного определения параметров скоростных летящих целей и головка самонаведения» приоритет: 31.03.2015, опубликовано: 27.11.2016 Бюл. №33 МПК F41G 7/00 (2006.01).
В этом способе обнаружения и высокоточного определения параметров скоростных летящих целей, включающем действия по обнаружению перемещающейся цели, фокусирование от нее излучения, преобразование в электрические сигналы, регистрацию их с заданными коэффициентами усиления и смещения, преобразование видеосигнала в цифровой код с квантованием в каждой точке, множество которых образуют кадр изображения, позиционирование окна анализа относительно прогнозируемого положения цели, масштабирование и фильтрацию, селекцию движущихся малоразмерных объектов и цели, а также запоминание результатов селекции. Производят запоминание кадра изображения в памяти основного и дополнительного, отстоящего от запомненного кадра на N кадров, при этом число N выбирают в зависимости от скорости цели. Далее определяют траекторию движения объекта как совокупность разностей координат кадра между предыдущей отметкой и последующей, после чего для каждого подвижного объекта строится траектория его движения и далее по характеру траектории определяют подвижный объект, наиболее похожий на цель по движению, после чего определяют координаты выявленной цели.
Недостатком данного способа обнаружения и высокоточного определения параметров скоростных летящих целей являются трудности обнаружения (фиксации) слабых сигналов с приемника излучения при малом отношении сигнала к шуму приемника излучения.
Известен способ, описанный в патенте №2686388 «Способ наведения на воздушную цель»; приоритет: 06.09.2018, опубликовано: 25.04.2019 Бюл. №12; МПК F41G 7/22 (2006.01),G06K 9/46 (2006.01).
В этом способе наведения на воздушную цель, построчно регистрируют и записывают сигналы от пикселей фоточувствительной матрицы, регистрирующей текущее изображение поля зрения оптической головки самонаведения (ОГС), начиная с первой строки матрицы, обрабатывают сигналы от пикселей. Одновременно с обработкой сигналов от пикселей в текущей строке записывают сигналы от пикселей в следующей строке. В процессе обработки сигналов в текущей строке проводят усреднение значения сигналов от каждого пикселя с заданного числа окружающих его пикселей. Полученные усредненные значения сигналов преобразуют в зависимости от яркости цели относительно яркости окружающего ее фона и определяют разность Н усредненного и не усредненного сигналов, Начиная с начала текущей строки определяют номер пикселя X1, для которого значение Н становится положительным, максимальное положительное значение Hm, номер пикселя Х2, после которого значение Н в текущей строке не является положительным, номер текущей строки Y. Записывают в память X1, Hm, X2,Y. Обрабатывают следующую строку матрицы и определяют в ней значения X1, Hm, X2,Y, а в случае превышения величины Hm значения, записанного для предыдущей строки, перезаписывают в память новые значения X1, Hm, X2,Y. По окончании обработки сигналов всех строк матрицы определяют координаты цели как (Х1+Х2)/2 и Y и выдают соответствующие управляющие сигналы на исполнительные устройства носителя.
Недостатком приведенного способа наведения на воздушную цель, является сложность обработки сигналов от пикселей фоточувствительной матрицы, при малом отношении сигнала к шуму элементов фоточувствительной матрицы. Другим существенным недостатком, является малое поле зрения оптической головки самонаведения обусловленное размерами матрицы. Наиболее близким (прототип) способом и системой наведения вращающегося снаряда по отраженному от цели частотному лазерному излучению является (патент RU 2231735 на изобретение заявка: 2003127770/02 МПК F41G7/22 (2000.01) опубликован, 27.06.2004 Бюл. №18).
В данном способе осуществляется подсвет цели на конечном участке полета снаряда, пеленгация цели оптико-электронной головкой, формирование на поверхности четырехсекторного фотоприемника светового пятна отраженного от цели лазерного излучения и определение углов пеленга цели в соответствии с соотношениями:

где Y, Z - угловые координаты пеленга цели по осям, перпендикулярным оптической оси оптико-электронной головки;
w1…w4 - амплитуды сигналов, снимаемых с четырех секторов фотоприемника;
k - коэффициент пропорциональности, в градусах.
Частоту вращения снаряда вычисляют по приращению  фазового угла пеленга цели за (Ns-1) периодов подсвета цели по формуле:
фазового угла пеленга цели за (Ns-1) периодов подсвета цели по формуле:

Затем по показаниям флюгерных датчиков вычисляют углы атаки и скольжения, по показаниям датчика температуры из таблицы, хранящейся в постоянном запоминающем устройстве, определяют τдв - время формирования равнодействующей тяги импульсных двигателей, а моменты их включения вычисляют по формуле

где tвкл - момент включения;
t - текущее время;
Nд - номер срабатывающего импульсного двигателя;
γа - угол между соплами импульсных двигателей, расположенных по окружности снаряда;
γц - фазовое положение цели;
γуст - установочный угол импульсного двигателя,
причем запуск импульсного двигателя проводят, когда модуль угла упреждения:

где α1 и α2 - углы атаки и скольжения;
Y и Z - углы пеленга цели, превышает текущее значение зоны нечувствительности, определяемое по формуле
или

где Е0 - начальная зона нечувствительности относительно оси оптико-электронной головки коррекции;
Kt - скорость изменения зоны нечувствительности;
tз - время захвата цели;
t0 - длительность изменения зоны нечувствительности.
Недостатком прототипа является малое поле зрения системы самонаведения на цель, а также трудности обнаружения (фиксации) слабых сигналов с приемника излучения при малом отношении сигнала к шуму фотоприемника. Технической задачей изобретения является упрощение способа и увеличение поля зрения и точности наведения управляемого боеприпаса на цель, за счет возможности выделения сигнала отраженного от цели, когда шум с приемника излучения, значительно превосходит сигнал, а также расширение спектрального диапазона анализируемых излучений от цели.
Сущность предлагаемого изобретения основана на том, что излучение от цели деполяризуют и формируют изображение цели на квадрантном поляризаторе, состоящим из четырех секторов с центральным углом 90°, плоскости поляризации которых ориентированы под углами 0°, 45°, 90°, 135° к координатной оси Y системы наведения, анализируют положение изображения цели на секционном поляризаторе, поляризационным ротатором и одноэлементным приемником излучения, преобразуя композицию излучений, прошедших через сектора поляризатора, в электрический сигнал, определяемый зависимостью:

сигнал обрабатывают двумя синхронными детекторами, частоты опорных напряжений которых, равны удвоенной угловой скорости ротатора поляризации, а фазы опорных напряжений синхронных детекторов соответствуют синфазной cos 2ωt и квадратурной sin 2ωt составляющим сигнала, при этом выходные сигналы синхронных детекторов формируют управляющие воздействия системы наведения боеприпаса на цель по двум ортогональным координатам X и Y, где Ф+Y, Ф-Y, - потоки излучения от цели, проходящие через сектора «+Y» и «-Y» поляризатора и соответствуют координатной оси наведения Y; Ф+X, Ф-X - потоки излучения от цели, проходящие через сектора «+Х» и «-X» поляризатора и соответствуют координатной оси наведения X; ω - угловая скорость ротатора поляризации; S - чувствительность одноэлементного приемника излучения. Данное положение поясняется следующим. Излучение от цели (видимой, ближней или дальней инфракрасной области спектра) формируют на квадрантном поляризаторе, состоящим из четырех секторов с центральным углом 90°. Плоскости поляризации каждого сектора ориентированы под углами 0°, 45°, 90°, 135°, к одной из координатных осей системы наведения. Излучение от цели может быть частично поляризованным, что приведет к возникновению систематической погрешности наведения боеприпаса на цель. Чтобы избежать систематической погрешности наведения боеприпаса на цель, излучение от цели деполяризуют. Прошедшее через квадрантный поляризатор излучение направляют на ротатор поляризации, плоскость поляризации которого вращается с угловой скоростью ω и далее на одноэлементный фотоприемник. Фотоприемник может работать в видимой, ближней или дальней инфракрасной области спектра.
Поток излучения, прошедшего через квадрантный поляризатор и ротатор поляризации, вращающийся с угловой скоростью ω, изменяется в соответствии с законом Малюса:

где Ф+Y, Ф-Y, Ф+X, Ф-X - потоки излучения, проходящие через сектора квадрантного поляризатора, плоскости поляризации которых ориентированы к соответствующим координатным осям системы наведения X и Y фиг 2.
Как следует из соотношения (1), поток излучения, попадающий на одноэлементный фотоприемник, содержит постоянную и переменную составляющие. Информационной, является переменная составляющая, для которой запишем:

Принимая во внимание, что:

соотношение (2), перепишем в виде:

Переменная составляющая сигнала на выходе фотоприемника, будет:

где S- чувствительность фотоприемника.
Как следует из соотношения (4), сигнал с фотоприемника содержит синфазную и квадратурную составляющие, которые можно выделить, используя синхронное детектирование. Синфазная составляющая(Ф+Y - Ф-Y)cos 2ωt несет информацию о смещении положения цели по координатной оси наведения Y, а квадратурная составляющая (Ф+X - Ф-X) sin 2ωt о смещении положения цели по координатной оси наведения X. Индексы (+) и (-) показывают направление смещения потока излучения от цели по соответствующим осям, относительно центра секционного поляризатора.
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий:
1. Формируют изображение цели на квадрантном поляризаторе, состоящим из четырех секторов с центральным углом 90°, плоскости поляризации которых ориентированы под углами 0°, 45°, 90°, 135° к координатной оси Y системы наведения;
2. Габариты квадрантного поляризатора могут обеспечить необходимый угол обзора;
3. Прошедшее излучение через ротатор поляризатор принимается одноэлементным фотоприемником;
4. Синхронное детектирование сигнала с одноэлементного фотоприемника позволяет формировать управляющие воздействия системы наведения боеприпаса на цель по двум ортогональным координатам X и Y, при шуме фотоприемника в несколько раз превышающего сигнал;
5. Использование проволочных поляризаторов позволит работать в широком диапазоне спектра от 1 мкм до 30 мкм.
Заявляемый способ являются результатом научно исследовательской и экспериментальной работы.
Краткое описание фигур чертежа.
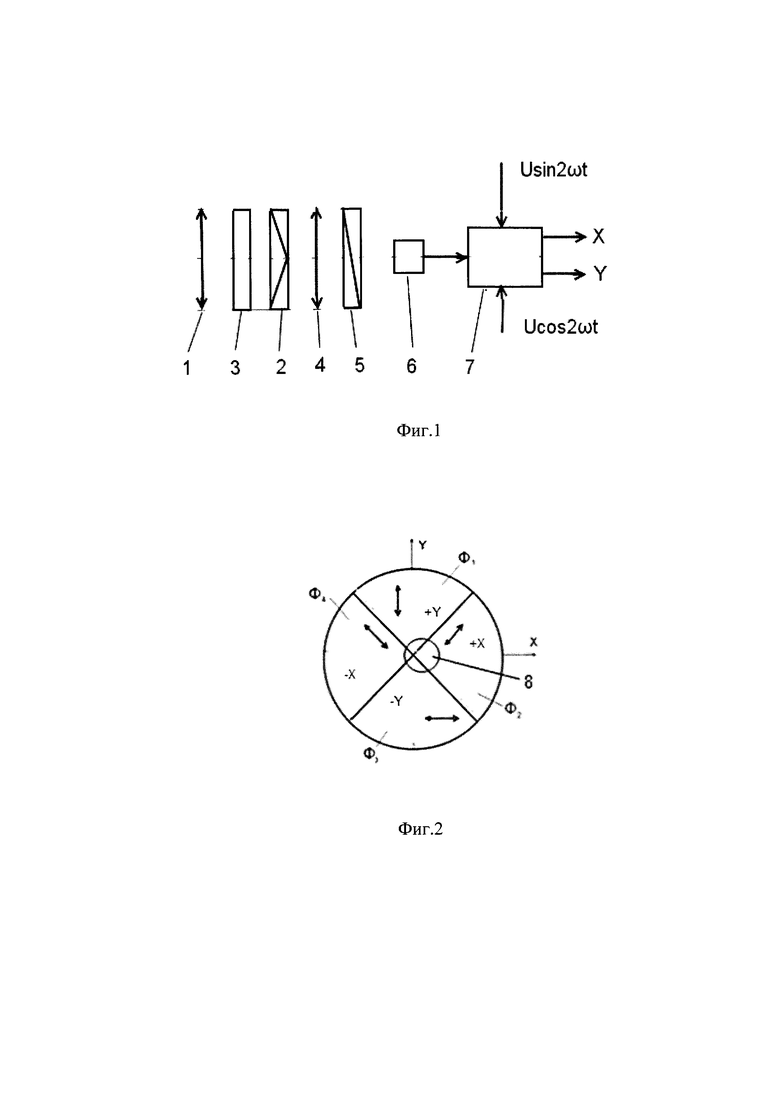
На фиг.1 приведена структурная схема проведения экспериментов.
На фиг.2 приведена схема квадрантного поляризатора, с направлениями плоскостей поляризации каждого сектора.
Структурная схема проведения экспериментов содержит:
1 - объектив;
2 - квадрантный поляризатор;
3 - деполяризатор;
4 - объектив;
5 - ротатор поляризации;
6 - приемник излучения;
7 - блок обработки сигнала с приемника излучения.
Система работает следующим образом. При помощи объектива 1 формируют изображение цели, в видимом или инфракрасном диапазоне спектра, на квадрантном поляризаторе 2. Предварительно излучение от цели, которое может быть частично поляризованным, деполяризуют деполяризатором 3, чтобы исключить ошибку наведения на цель. Прошедшее квадрантный поляризатор 2 излучение, объективом 4, направляют через ротатор поляризации 5, на приемник излучения 6. Плоскость поляризации ротатора поляризации 5, вращается с угловой скоростью со, а излучение падающее на приемник изменяется в соответствии с соотношением (1). Переменная составляющая электрического сигнала с приемника излучения 6:

поступает в блок обработки сигнала 7, где обрабатывается двумя синхронными детекторами. Частоты опорных напряжений синхронных детекторов, равны удвоенной угловой скорости вращения плоскости поляризации ротатора 5. При этом фазы опорных напряжений синхронных детекторов соответствуют синфазной Ucos 2ωt и квадратурной Usin 2ωt составляющим сигнала. На выходе блока обработки сигнала 7, формируются управляющие воздействия системы наведения боеприпаса на цель по двум ортогональным координатам X и Y. Индексы (+) и (-) показывают направление смещения изображения цели относительно центра секционного поляризатора по соответствующим осям. Направления плоскостей поляризации каждого сектора квадрантного поляризатора приведенного на фиг.2, показаны стрелками, а изображение цели в виде окружности 8.
Таким образом, заявленное техническое решение обеспечивает формирование изображение цели на квадрантном поляризаторе, состоящим из четырех секторов с центральным углом 90°, плоскости поляризации которых ориентированы под углами 0°, 45°, 90°, 135° к координатной оси Y системы наведения, а габариты четырех секторного поляризатора могут обеспечить необходимый угол обзора. Прошедшее через поляризатор излучение принимается одноэлементным приемником излучения, а синхронное детектирование сигнала с одного приемника позволяет формировать управляющие воздействия системы наведения боеприпаса на цель по двум ортогональным координатам X и Y, при шуме приемника в несколько раз превышающего сигнал.
Использование серийно выпускаемых проволочных поляризаторов работающих в широком диапазоне спектра от 1 мкм до 30 мкм, а также приемников излучения работающих в ближнем и дальнем ИК-диапазонах, позволит создавать широкодиапазонные системы наведения управляемого боеприпаса на цель.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| СПОСОБ НАБЛЮДЕНИЯ СТЕРЕОИЗОБРАЖЕНИЙ С ОБЪЕДИНЕННЫМ ПРЕДЪЯВЛЕНИЕМ РАКУРСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2306680C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2017 |
|
RU2660777C1 |
| СПОСОБ НАВЕДЕНИЯ НА ВОЗДУШНУЮ ЦЕЛЬ | 2018 |
|
RU2686388C1 |
| СИСТЕМА НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2120106C1 |
| Волоконно-оптический гироскоп | 2022 |
|
RU2783470C1 |
| Волоконно-оптический гироскоп | 2020 |
|
RU2764704C1 |
| СПОСОБ ДОСТАВКИ ПОСТАНОВЩИКА РАДИОПОМЕХ | 2008 |
|
RU2361233C1 |
| ОПТИЧЕСКОЕ НЕВЗАИМНОЕ УСТРОЙСТВО | 2007 |
|
RU2359300C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ КООРДИНАТОР | 1995 |
|
RU2140659C1 |
Изобретение относится к области систем самонаведения, в частности к способам наведения носителя на цель оптической головкой самонаведения. Сущность предлагаемого изобретения основана на том, что излучение от цели деполяризуют и формируют изображение цели на квадрантном поляризаторе, состоящем из четырех секторов с центральным углом 90°, плоскости поляризации которых ориентированы под углами 0°, 45°, 90°, 135° к координатной оси Y системы наведения, анализируют положение изображения цели на квадрантном поляризаторе, ротатором поляризации и приемником излучения, преобразуя композицию излучений, прошедших через сектора квадрантного поляризатора, в электрический сигнал, определяемый заданной зависимостью. Полученный сигнал обрабатывают двумя синхронными детекторами, частоты опорных напряжений которых равны удвоенной угловой скорости ротатора поляризации, а фазы опорных напряжений синхронных детекторов соответствуют синфазной и квадратурной составляющим сигнала. При этом выходные сигналы синхронных детекторов формируют управляющие воздействия системы наведения боеприпаса на цель по двум ортогональным координатам X и Y. Технический результат – повышение точности наведения управляемого боеприпаса на цель. 1 з.п. ф-лы, 2 ил.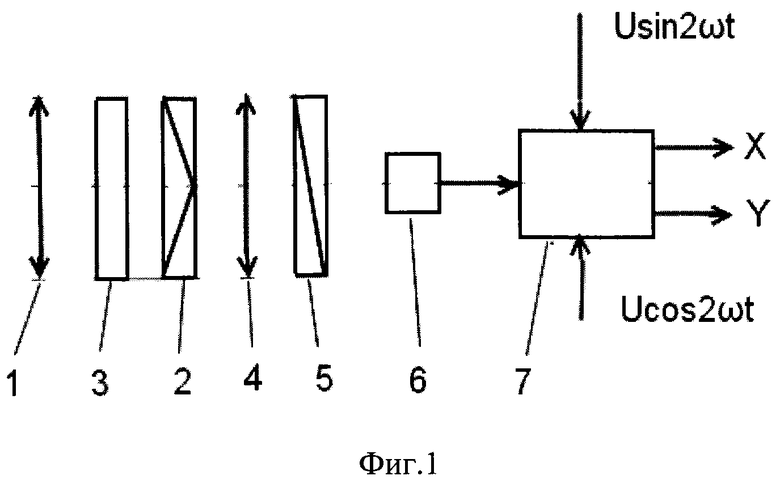
1. Способ формирования сигналов управления боеприпасом оптической головкой самонаведения с одноэлементным ИК-приемником, включающий формирование изображения цели в модуле анализа положения цели в системе координат наведения и выработки управляющих воздействий системы наведения боеприпаса на цель, отличающийся тем, что излучение от цели деполяризуют и формируют изображение цели на поляризаторе, состоящем из четырех секторов с центральным углом 90°, плоскости поляризации которых ориентированы под углами 0°, 45°, 90°, 135° к координатной оси Y системы наведения, анализируют положение изображения цели на секционном поляризаторе поляризационным ротатором и преобразуют одноэлементным приемником излучения композицию излучений, прошедших через сектора поляризатора, в электрический сигнал:

который обрабатывают двумя синхронными детекторами, частоты опорных напряжений синхронных детекторов равны удвоенной угловой скорости вращения плоскости поляризации анализатора, а фазы опорных напряжений синхронных детекторов соответствуют синфазной cos 2ωt и квадратурной sin 2ωt составляющим сигнала, при этом выходные сигналы синхронных детекторов формируют управляющие воздействия системы наведения боеприпаса на цель по двум ортогональным координатам X и Y, где Ф+Y, Ф-Y - потоки излучения от цели, проходящие через сектора «+Y» и «-Y» поляризатора, соответствуют координатной оси наведения Y; Ф+X, Ф-X - потоки излучения от цели, проходящие через сектора «+Х» и «-X» поляризатора, соответствуют координатной оси наведения X; ω - угловая скорость вращения поляризационного ротатора; S - чувствительность приемника излучения.
2. Способ по п. 1, отличающийся тем, что в качестве приемника используют приемник с возможностью работы в видимой, ближней или дальней инфракрасной области излучения.
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕГОСЯ СНАРЯДА ПО ОТРАЖЕННОМУ ОТ ЦЕЛИ ЧАСТОТНОМУ ЛАЗЕРНОМУ ИЗЛУЧЕНИЮ | 2003 |
|
RU2231735C1 |
| СИСТЕМА ВЫСОКОТОЧНОГО УПРАВЛЯЕМОГО ГИПЕРЗВУКОВОГО АРТИЛЛЕРИЙСКОГО ОРУЖИЯ | 2002 |
|
RU2295102C2 |
| RU 2792607 C1, 22.03.2023 | |||
| EP 628782 B1, 06.05.1998 | |||
| ЦИКЛОННОЕ УСТРОЙСТВО | 1994 |
|
RU2128555C1 |

