ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение касается инструмента для подготовки места имплантации для имплантата и, в частности, для создания выемки в костной ткани трубчатой кости. Кроме того, настоящее изобретение касается комплекта из имплантата и инструмента.
УРОВЕНЬ ТЕХНИКИ
При закреплении имплантата в трубчатой кости для ведения и, при определенных обстоятельствах, также для стабилизации имплантата может использоваться имеющийся в диафизе трубчатой кости мозговой канал. Это имеет то преимущество, что должно удаляться меньше костной ткани для создания отверстия или, соответственно, выемки в кости для помещения имплантата. Соответственно этому почти всегда при креплении имплантата в трубчатой кости стремятся вводить имплантат в мозговой канал так, чтобы в наибольшей возможной степени сохранялся костный стержень. Однако, как описывается ниже, с помощью имеющихся в уровне техники инструментов и технологий это возможно только в ограниченной степени.
Для препарирования кости применяются, в частности, две технологии. Одна технология представляет собой применение развертки, которая вводится с одного конца трубчатой кости и путем вращения вокруг ее продольной оси создает соответствующее этой развертке вращательно-симметричное отверстие в кости. При этом кость перед вводом развертки может быть предварительно просверлена сверлом. Эта технология допускает быстрое и точное по форме создание выемки, требующейся для вставления имплантата.
Другая технология представляет собой применение ручного распатора. С помощью такого распатора, в противоположность развертке, может создаваться не вращательно-симметричная выемка кости. Распатор для создания движения резания линейно движется по пути движения. Следовательно, его движение резания принципиально отличается от вращательного движения резания развертки. Точнее говоря, у него движение подачи и движения резания совпадают. У развертки движение резания, в отличие от этого, делится на линейное движение подачи и вращательное движение резания.
Как следствие этого, с помощью распатора можно создавать выемку в костной ткани, в которую может помещаться имплантат, имеющий кривизну в продольном направлении. Такая кривизна может быть предусмотрена для адаптации имплантата к геометрии данной кости. Такие имплантаты называются также анатомически адаптированными.
Однако эта распаторная технология имеет тот недостаток, что при съеме костной ткани не может достигаться такая же точность формы, как у вышеназванной развертки. Причиной этого, прежде всего, является выполнение движения резания и подачи рукой по искривленному пути движения, в то время как вращательное движение резания развертки почти всегда выполняется с помощью привода, и лишь прямолинейное направление подачи ведется вручную рукой. Вследствие этого хирургу легче вести развертку, так как он должен управлять только движением подачи, а движение резания, в отличие от этого, выполняется за счет вращения развертки.
Несмотря на это, с помощью развертки, прежде всего, в случае имплантатов, которые крепятся при помощи врастания в кость, должна также создаваться выемка с как можно более точной посадкой для достижения достаточной первичной стабильности за счет вдавливания имплантата в кость. Чтобы созданная в кости выемка как можно меньше отклонялась от предусмотренной формы, поперечное сечение распатора возрастает от ведущей, передней стороны назад, как правило, существенно сильнее, чем поперечное сечение развертки. Тем самым достигается, что при движении распатора выемка при каждом рабочем ходе увеличивается по всей своей длине. Другими словами, хирург при этой конфигурации распатора должен меньше обращать внимание на то, чтобы точно следовать ранее проведенному вектору движения, так материал снимается как по всей длине распатора, и так при каждом движении подачи возможна некоторая корректировка.
В противоположность этому в случае развертки поперечное сечение выемки может оставаться постоянным, хотя развертка относительно направления подачи продвигается дальше вперед, чтобы удалять костную ткань. В результате расчет имплантата может функционально лучше адаптироваться в отношении свойств материала.
Обе технологии имеют тот недостаток, что они во время операции не в состоянии реагировать на индивидуальную анатомию данной трубчатой кости. Следствием являются нежелательные надрезы в костной ткани. Это является отрицательным моментом, прежде всего, при травмах кортикальной костной ткани в области диафиза. Вследствие этого трубчатая кость в этой области структурно ослабляется. Кроме того, вызванная концентрация напряжений в надрезе делает кость предрасположенной к изгибным нагрузкам и в худшем случае может приводить к перелому кости.
Кроме того, на дистальном конце стержня имплантата, который лишь ведется через мозговую полость, но не должен опираться, это может обусловливать так называемый стресс-шилдинг, т.е. имплантат опирается на охватывающую мозговую полость кортикальную ткань. Происходит неправильная нагрузка кости вследствие ввода сил в области диафиза. Костная ткань реагирует на это построением костной ткани в области неестественного ввода сил и резорбцией кости в месте, где собственно должен осуществляться ввод сил. Этот феномен известен, прежде всего, у суставных эндопротезов и может приводить к отторжению костной ткани и имплантата или, соответственно, протеза.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Целью было, следовательно, предоставить инструмент для отверстия костной ткани для имплантата, причем этот инструмент должен быть в состоянии реагировать на анатомические данные кости, в частности трубчатой кости. Одновременно нужно придерживаться как можно меньшей резекции костной ткани. Другими словами, инструмент настоящего изобретения должен достигать как можно более щадящей для кости подготовки места имплантации и одновременно обеспечивать возможность снабжения анатомически адаптированным и, тем не менее, щадящим кость имплантатом.
Ввиду этого требования настоящее изобретение предоставляет инструмент для создания выемки в костной ткани для имплантата, причем этот инструмент имеет первый продолговатый сегмент инструмента, имеющий первую продольную ось и гнездо. Гнездо имеет вокруг первой продольной оси направленную по существу радиально наружу первую функциональную поверхность и направленную радиально внутрь вторую функциональную поверхность. Кроме того, инструмент имеет второй продолговатый сегмент инструмента, имеющий вторую продольную ось и вводный участок, который может вводиться в гнездо первого сегмента инструмента, причем на этом вводном участке вокруг второй продольной оси выполнена по меньшей мере одна направленная радиально наружу функциональная поверхность, которая взаимодействует с направленной наружу первой функциональной поверхностью первого сегмента инструмента. Кроме того, одна из указанной по меньшей мере одной функциональной поверхности вводного участка взаимодействует со второй функциональной поверхностью первого сегмента инструмента. При этом одна из взаимодействующих пар функциональных поверхностей для передачи вращающего момента находится в сцеплении друг с другом, а другая из взаимодействующих пар функциональных поверхностей допускает относительное движение между собой.
Такой состоящий из двух частей инструмент имеет то преимущество, что при создании заданной выемки для протеза он может в некотором объеме адаптироваться к данной анатомической ситуации пациента, как описано далее.
Вводный участок помещен между направленной радиально внутрь функциональной поверхностью и направленной радиально наружу функциональной поверхностью гнезда с радиальным сдвигом относительно первой продольной оси. Кроме того, продольные оси двух сегментов инструмента пересекаются под некоторым углом. Во введенном в гнездо состоянии направленная радиально наружу функциональная поверхность второго сегмента инструмента благодаря этой конструкции может двигаться вокруг направленной радиально наружу первой функциональной поверхности первого сегмента инструмента, без передачи при этом вращения между продольными осями двух сегментов инструмента. Это значит, что, когда первый или второй сегмент инструмента фиксируется, один конец вводного участка точно так же, как и противоположный этому концу другой конец может двигаться по окружной траектории. Другими словами, один из сегментов инструмента вращается вокруг продольной оси другого сегмента инструмента.
Когда, в отличие от этого, передний, если смотреть в направлении подачи, сегмент инструмента ведется, а другой сегмент инструмента вращается, посредством находящейся в сцеплении пары функциональных поверхностей можно передавать вращательное движение между двумя продольными осями. Допускающая относительное движение пара функциональных поверхностей находится в контакте друг с другом и таким образом опирает вводный участок в гнезде. Другими словами, две функциональные поверхности скользят друг относительно друга. Благодаря этому две ориентированные под углом друг к другу продольные оси остаются в одной и той же абсолютной плоскости, и вращение и вращающий момент передаются от одной на другую продольную ось. Как следствие этого, возникает выемка в костной ткани, которая соответствует наружной геометрии инструмента, и в которой может крепиться соответствующий имплантат.
Благодаря этим свойствам сегментов инструмента передний сегмент инструмента при вводе в костную ткань может следовать пути наименьшего сопротивления. Другими словами, костная ткань своей плотностью и структурой влияет на путь подачи. Как следствие этого «ведения» может происходить измененное ориентирование инструмента при вращении одного сегмента инструмента вокруг продольной оси другого сегмента инструмента. При этом не осуществляется или осуществляется только частичная передача вращательного движения и вращающего момента от одной продольной оси к другой продольной оси, в то время как другая часть обусловливает вращение другого сегмента инструмента вокруг этой продольной оси. Благодаря этому может, в частности, щадиться кортикальная костная ткань диафиза трубчатой кости, так как передний сегмент инструмента при вводе в мозговой канал в некоторой степени самопроизвольно ориентируется вдоль этого мозгового канала, но при этом основополагающая геометрия выемки для имплантата сохраняется. Другими словами, инструмент щадит окружающую костную ткань, когда он при создании выемки удаляет как можно меньше костной ткани или, соответственно, сначала костную ткань, имеющую меньшую плотность.
В результате расположение двух сегментов инструмента под углом приводит к возникновению предопределенной выемки или, соответственно, отверстия для стержня имплантата в кости, которое имеет соответствующий угол. При этом предлагаемый изобретением инструмент объединяет преимущества вышеназванных двух технологий, когда хирург должен выполнять лишь движение подачи, в то время как вращательное движение резания может осуществляться с помощью привода, и одновременно становится возможна имплантация импланта, который анатомически адаптирован.
В другом варианте осуществления инструмента первая функциональная поверхность первого сегмента инструмента образуется выступом в гнезде, причем этот выступ предпочтительно является коническим или цилиндрическим.
При этом варианте осуществления первой функциональной поверхности первого сегмента инструмента облегчается, в частности, введение вводного участка второго сегмента инструмента.
При этом первая функциональная поверхность первого сегмента инструмента представляет собой предпочтительно коническую поверхность, в частности коническую поверхность, имеющую круглое поперечное сечение. Выступ сужается предпочтительно в направлении отверстия гнезда. Если выступ представляет собой цилиндрический выступ, то он также имеет предпочтительно круглое поперечное сечение.
В другом особенно предпочтительном варианте осуществления инструмента находящаяся в сцеплении пара функциональных поверхностей для передачи вращающего момента находится в сцеплении с геометрическим замыканием.
Применение геометрического замыкания обладает по сравнению с фрикционным замыканием для передачи вращающего момента преимуществом определенной кинематики, при которой предотвращена опасность проскальзывания между телами.
В другом предпочтительном варианте осуществления инструмента поперечные сечения функциональных поверхностей пар функциональных поверхностей перпендикулярно соответствующей продольной оси имеют по существу круглый периметр.
Этот вариант осуществления приводит к тому, что первый и второй сегмент инструмента расположены под постоянным углом друг относительно друга, так что вводный участок второго сегмента инструмента движется в гнезде по существу в перпендикулярной продольной оси первого сегмента инструмента плоскости по круговой траектории вокруг этой продольной оси.
Благодаря постоянному углу движение подачи может, в частности, осуществляться рукой хирургом под точным контролем. Причем возникающая при этом выемка в костной ткани соответствует введенным в костную ткань сегментам инструмента и вместе с тем предусмотренной для имплантата предопределенной геометрии и размеру.
Под по существу круглым периметром в этом контексте следует также понимать периметр, который, как правило, может отличаться от идеальной круглой формы. Это, например, происходит тогда, когда упомянутая пара функциональных поверхностей передает вращающий момент при помощи сцепления с геометрическим замыканием. Для его достижения на периметре функциональных поверхностей должны быть предусмотрены выемки или, соответственно, выступы, имеющие форму, с помощью которой становится возможно сцепление между функциональными поверхностями.
В другом особенно предпочтительном варианте осуществления первый сегмент инструмента и второй сегмент инструмента имеют по меньшей мере две отдельные взаимодействующие между ними пары функциональных поверхностей.
Благодаря тому, что в этом варианте осуществления каждая пара функциональных поверхностей имеет по две собственные функциональные поверхности, инструмент может снабжаться меньшим диаметром, чем инструмент, у которого одна функциональная поверхность в одной области находится в сцеплении с функциональной поверхностью для передачи вращающего момента, а в другой области, в которой выполняется относительное движение, находится в контакте с другой функциональной поверхностью.
В другом варианте осуществления первый сегмент инструмента и второй сегмент инструмента имеют по меньшей мере три отдельные, взаимодействующие между ними пары функциональных поверхностей. При этом первая пара функциональных поверхностей допускает между собой относительное движение, вторая пара функциональных поверхностей поддерживает вводный участок в гнезде, и вращающий момент может передаваться с помощью третьей пары функциональных поверхностей между первым и вторым сегментом инструмента.
При этом варианте осуществления это функциональное разделение, как поясняется ниже, имеет преимущество очень точного выполнения движения. Как описано выше, вводный участок лежит на одной стороне напротив направленной радиально внутрь функциональной поверхности гнезда, а на другой стороне направленной радиально наружу функциональной поверхности гнезда. При этом пара функциональных поверхностей для передачи вращающего момента и пара функциональных поверхностей для опоры лежат на одной и той же стороне, в то время как пара функциональных поверхностей, которая допускает относительное движение, действует на другой стороне. Так как передача вращающего момента и опирание или, соответственно, опора происходит на одной и той же стороне, следовательно, поддерживающая пара функциональных поверхностей обкатывается друг под другу. Это значит также, что находящаяся в контакте друг с другом пара функциональных поверхностей, которая допускает относительное движение, тоже имеет поддерживающую функцию.
Также этот вариант осуществления имеет то преимущество, что становится возможной передача вращающего момента по всему периметру между гнездом и вводным участком, так как вторая пара функциональных поверхностей берет на себя опорную функцию.
В другом варианте осуществления направленная радиально наружу функциональная поверхность первого сегмента инструмента может сменяться и предпочтительно является частью третьего сегмента инструмента.
При этом варианте осуществления адаптационная способность инструмента к анатомии пациента повышается за счет того, что при смене первой функциональной поверхности может изменяться угол между продольными осями первого и второго сегмента инструмента. Это свойство первого сегмента инструмента этого варианта осуществления предпочтительным образом дополняет возможность смены второго сегмента инструмента, который, как изложено выше, может вводиться в гнездо первого сегмента инструмента через вводный участок.
Если сменная функциональная поверхность является частью третьего сегмента инструмента, то это позволяет дополнительно обрабатывать и адаптировать выемку в костной ткани в ее проксимальной области.
Также инструмент может таким образом удлиняться, начиная с предопределенной глубины выемки. Благодаря этому длина инструмента является адаптируемой, так что он может вестись простым образом почти независимо от глубины выемки.
В другом варианте осуществления по меньшей мере один из сегментов инструмента на обращенной наружу окружной поверхности имеет по меньшей мере один режущий элемент.
Такой предусмотренный режущий элемент предпочтителен, прежде всего, тогда, когда должен удаляться большего размера объем костной ткани, или когда эта костная ткань представляет собой очень плотную ткань. Последнее относится, например, к очень плотному губчатому слою и к кортикальному слою, так что адаптация выемки в костной ткани к предусмотренной для имплантата геометрии вследствие уплотнения костной ткани недостижима.
В одном из особенно предпочтительных вариантов осуществления гнездо первого сегмента инструмента имеет удерживающую поверхность, которая образована внутренним расширением поперечного сечения гнезда, и на которую во введенном состоянии опирается соответствующее ей расширение поперечного сечения вводного участка, так что второй сегмент инструмента удерживается в первом сегменте инструмента.
В этом варианте осуществления второй сегмент инструмента удерживается в первом сегменте инструмента и зафиксирован в такой степени, что после введения вводного участка в гнездо первого сегмента инструмента инструмент до установки на костную ткань удерживается кольцеобразной удерживающей поверхностью.
За счет расширения поперечного сечения в гнезде первого сегмента инструмента создается поднутрение, которое образует ступень, проходящую по существу к продольной оси первого сегмента инструмента. На нее может опираться уступ, который имеется благодаря соответствующему расширению поперечного сечения на вводном участке второго сегмента инструмента и обращен от острия вводного участка.
Можно также предусмотреть удерживающую поверхность первого сегмента инструмента в виде окружного паза в гнезде, в который вставляется соответствующий выступ вводного участка. В каждом случае предотвращается простое вываливание второго сегмента инструмента из первого сегмента инструмента.
В другом особенно предпочтительном варианте осуществления на высоте точки пересечения первой продольной оси и второй продольной оси расположена пара функциональных поверхностей, которая включает в себя направленную радиально наружу функциональную поверхность вводного участка и направленную радиально внутрь функциональную поверхность гнезда, причем эта пара функциональных поверхностей предпочтительно находится в сцеплении для передачи вращающего момента.
Благодаря этому расположению функциональных поверхностей в точке пересечения двух продольный осей осуществляется особенно точное и простое ведение второго сегмента инструмента в первом сегменте инструмента. В частности, эти две функциональные поверхности при первом варианте осуществления могут находиться в контакте по своему периметру, так что этих функциональных поверхностей достаточно, чтобы определенным образом поддерживать сегменты инструмента в отношении их вращательной степени свободы. Это касается как пары функциональных поверхностей для передачи вращающего момента, так и пары функциональных поверхностей для поддержки или, соответственно, опоры или пары функциональных поверхностей, которая допускает между собой относительное движение.
Однако предпочтительно в этом участке осуществима передача вращающего момента, которая может осуществляться через несколько мест на периметре, и предпочтительно при сцеплении с геометрическим замыканием осуществляется опирание на примерно диаметрально противоположную сторону. При этом варианте осуществления предотвращается момент изгиба вокруг оси, перпендикулярной продольным осям, так что нагрузка на материал ниже, и инструмент может выполняться компактнее, т.е. с меньшим диаметром. То есть и в этом варианте осуществления речь идет о приеме, который делает возможным лучшее ведение инструмента.
Предоставляется также сегмент инструмента, имеющий продольную ось, вокруг которой для введения другого сегмента инструмента в сегменте инструмента выполнено гнездо. Это гнездо имеет отверстие, по меньшей мере одну направленную радиально внутрь функциональную поверхность и концевую поверхность, которая по меньшей мере на отдельных участках образована направленной радиально наружу функциональной поверхностью, при этом одна из этих функциональных поверхностей предусмотрена для передачи вращающего момента другому сегменту инструмента, а другая функциональная поверхность предназначена, чтобы допускать относительное движение относительно другого сегмента инструмента.
Этот сегмент инструмента с его признаками имеет вышеописанные преимущества и образует вместе с другим сегментом инструмента инструмент, с помощью которого может создаваться выемка в костной ткани для помещения имплантата. При этом гнездо под инструмент имеет то преимущество, что в нем могут помещаться разные инструменты. Так, например, можно сначала подготавливать выемку в костной ткани сверлом, а после этого дорабатывать разверткой. При этом вышеописанная структурная конструкция гнезда позволяет, чтобы выемка в костной ткани проходила под углом соответственно тому, как проходит под углом геометрия вставляемого имплантата.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На сопроводительных фигурах, на которые далее делается ссылка в рамках подробного описания предпочтительных вариантов осуществления, элементы, имеющие одинаковую функцию и/или конфигурацию, обозначаются одинаковыми ссылочными обозначениями. При этом показано:
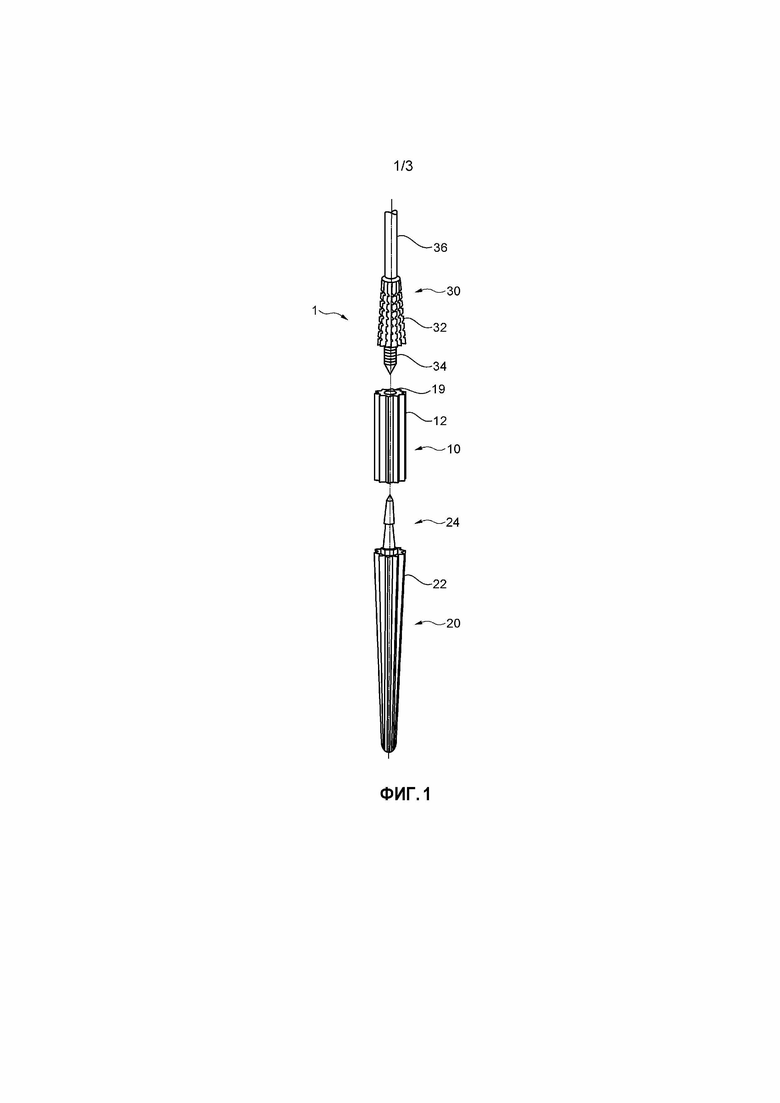
фиг.1: схематичный вид одного из примерных вариантов осуществления предлагаемого изобретением инструмента, выполненного из трех частей;
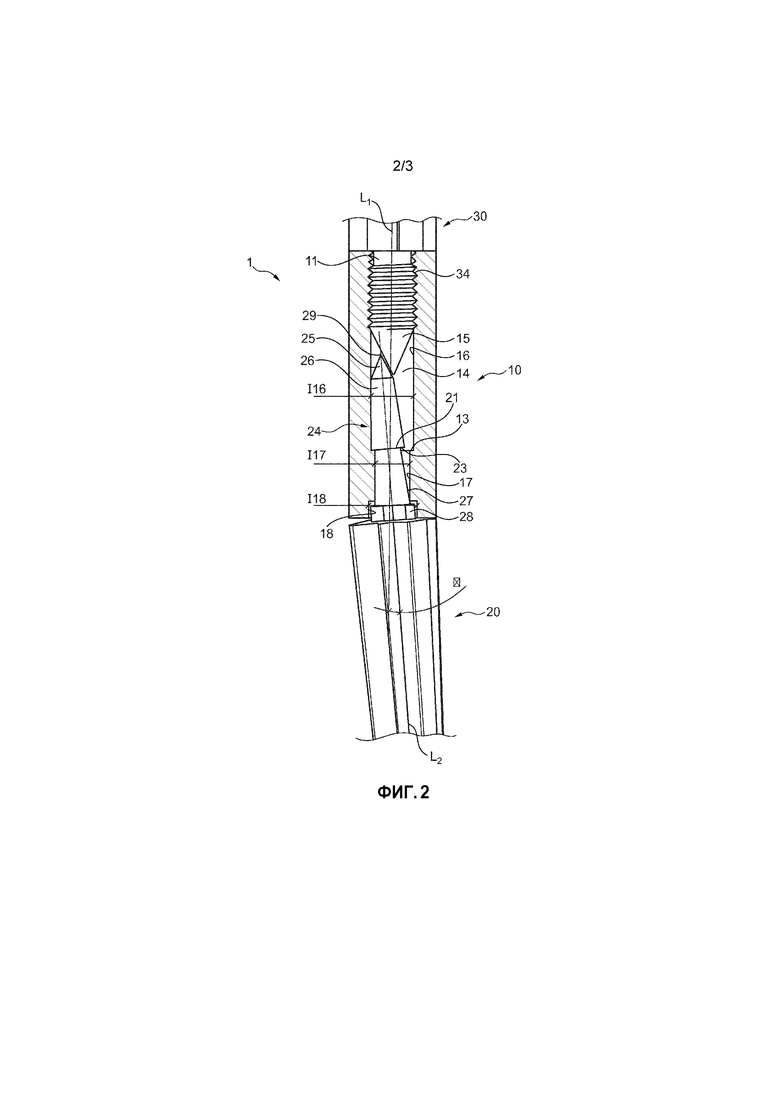
фиг.2: схематичный вид сечения примерного варианта осуществления предлагаемого изобретением инструмента, который поясняет взаимную опору двух сегментов инструмента, и
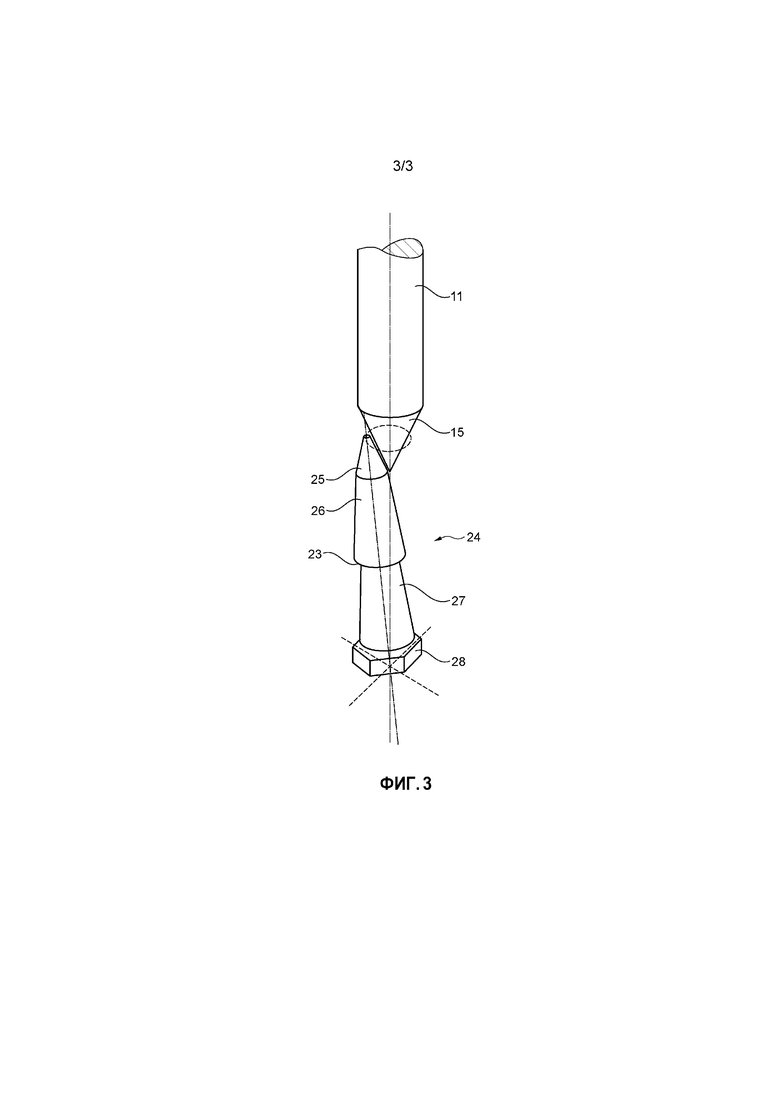
фиг.3: схематичный трехмерный вид сбоку одного из примерных вариантов осуществления предлагаемого изобретением инструмента для пояснения кинематики.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В последующем описании наименование «дистальный» относится к стороне компонента, лежащей впереди в направлении подачи инструмента. Соответственно этому наименование «проксимальный» относится к стороне компонента, лежащей сзади в направлении подачи инструмента.
На фиг.1 показан один из примерных вариантов осуществления предлагаемого изобретением инструмента 1, с помощью которого может создаваться выемка в трубчатой кости. Инструмент 1 имеет первый сегмент 10 инструмента, второй сегмент 20 инструмента и третий сегмент 30 инструмента.
Второй сегмент 20 инструмента имеет режущие элементы 22, с помощью которых может создаваться выемка или, соответственно, отверстие в кости, в частности трубчатой кости. Точно так же инструмент 1, выполненный в виде развертки, может быть предусмотрен для того, чтобы расширять уже существующее или подготовленное отверстие в костной ткани. Следовательно, и как уже описано выше, инструмент 1 предусмотрен для того, чтобы подготавливать выемку, которая по своей геометрии и своим размерам адаптирована к имплантируемому имплантату.
Находящийся в направлении подачи впереди продолговатый сегмент 20 инструмента может быть выполнен, как показано на фиг.2, коническим. Точно так же можно выполнить инструмент 1 для создания цилиндрического отверстия, как это происходит у первого сегмента 10 инструмента. Для создания выемки на периметре второго сегмента 20 инструмента предусмотрены режущие элементы 22. С их помощью посредством вращения второго сегмента 20 направляющая мачта вокруг своей продольной оси может сниматься окружающая костная ткань.
Кроме того, второй сегмент 20 инструмента для соединения с первым сегментом 10 инструмента и для передачи вращения между двумя сегментами инструмента имеет вводный участок 24. Вводный участок 24 находится в направлении подачи, если смотреть вдоль продольной оси, на заднем конце второго сегмента 20 инструмента.
Вводный участок 24 может вводиться в не показанное гнездо 14 первого сегмента 10 инструмента. Как подробнее описано ниже, при этом первый сегмент 10 инструмента и второй сегмент 20 инструмента расположены под углом друг к другу.
Первый сегмент 10 инструмента для образования выемки или, соответственно, отверстия в костной ткани в показанном варианте осуществления инструмента 1 тоже может иметь расположенные на периметре в продольном направлении сегмента 10 инструмента режущие элементы 12. Как можно видеть на фиг.1 по образованной режущими инструментами 12 боковой поверхности, сегмент 10 инструмента предусмотрен для образования цилиндрического отверстия. Разумеется, также у первого сегмента 10 инструмента по меньшей мере на отдельных участках может быть предусмотрен сужающийся по меньшей мере на отдельных участках вариант осуществления. Кроме того, можно предусмотреть на первом сегменте 10 инструмента режущие элементы 12 только на отдельных участках или совсем не предусматривать.
На стороне, лежащей в направлении подачи первого сегмента 10 инструмента впереди, предусмотрено гнездо 14 (см. фиг.2), в которое может вставляться второй сегмент 20 инструмента. На противоположной в продольном направлении стороне первого сегмента 10 инструмента предусмотрено гнездо для третьего сегмента 30 инструмента.
В настоящем примерном варианте осуществления третий сегмент 30 инструмента посредством выступа 11, который имеет резьбу 34, разъемно соединен с резьбой 19, предпочтительно резьбовым отверстием, первого сегмента 10 инструмента. Альтернативно могут также применяться другие известные специалисту технологии соединения вращающихся инструментов. Кроме того, можно выполнить первый сегмент 10 инструмента и третий сегмент 30 инструмента цельными.
И третий сегмент 30 инструмента, как показано в примерном варианте осуществления фиг.1, может иметь режущие элементы 32.
На дистальном конце продолговатого третьего сегмента 30 инструмента находится вышеназванная резьба 34 для соединения с первым сегментом 10 инструмента. На противоположном или проксимальном конце третьего сегмента 30 инструмента предусмотрен зажимной элемент 36, который в настоящем варианте осуществления выполнен цилиндрическим и, например, может зажиматься в бормашине. Вводимый через соединительный элемент 36 вращающий момент может передаваться от третьего сегмента 30 инструмента на первый сегмент 10 инструмента и от него, в свою очередь, на второй сегмент 20 инструмента.
Эта модульная конструкция инструмента 1 имеет то преимущество, что она очень хорошо может адаптироваться к имплантируемому имплантату или, соответственно, создаваемому для него отверстию в костной ткани.
На фиг.2 показан вид сечения первого сегмента 10 инструмента, который своим проксимальным концом соединен с третьим сегментом 30 инструмента, а своим дистальным концом со вторым сегментом 20 инструмента. В представленном варианте осуществления первого сегмента 10 инструмента он имеет проходное отверстие. Это проходное отверстие предусмотрено на своем проксимальном конце с резьбой 19 для помещения резьбового участка 34 на дистальном выступе третьего сегмента 30 инструмента. Остающееся после ввертывания резьбового участка 34 свободное пространство в проходном отверстии образует гнездо 14 для вводного участка 24 второго сегмента 20 инструмента.
Гнездо 4 имеет из проксимального в дистальном направлении направленную радиально внутрь вторую функциональную поверхность 16, кольцевую удерживающую поверхность 13, направленную радиально внутрь третью функциональную поверхность 17 и направленную радиально внутрь четвертую функциональную поверхность 18. Эти функциональные поверхности, как изображено, являются предпочтительно цилиндрическими, и еще более предпочтительно выполнены круглоцилиндрическими. Как описано ниже в рамках модификаций настоящего варианта осуществления, может быть также предусмотрено меньше функциональных поверхностей.
Направленная радиально внутрь вторая функциональная поверхность 16 имеет внутренний размер I16, который больше, чем внутренний размер I 17 направленной радиально внутрь третьей функциональной поверхности 17. За счет возникающего при этом расширения гнезда 14 в проксимальном направлении образуется уступ, который образует кольцевую удерживающую поверхность 13 в гнезде 14 второго сегмента 20 инструмента. Причем эта кольцевая удерживающая поверхность 13 предпочтительно выполнена перпендикулярно продольной оси L1 первого сегмента 10 инструмента. Направленная радиально внутрь четвертая функциональная поверхность 18 имеет внутренний размер I18, который, в свою очередь, больше диаметра I17.
В представленном на фиг.2 варианте осуществления направленные радиально внутрь функциональные поверхности 16 и 17 выполнены круглоцилиндрическими. Следовательно, внутренний размер I16 второй функциональной поверхности 16 и внутренний размер I17 третьей функциональной поверхности 17 является внутренним диаметром. В отличие от этого, направленная радиально внутрь четвертая функциональная поверхность 18 первого сегмента 10 инструмента выполнена с геометрией, которая делает возможным сцепление с соответствующей функциональной поверхностью 28 вводного участка 24 для передачи вращающего момента. В настоящем примерном варианте осуществления на фиг.2 и 3 речь идет о шестиграннике. Разумеется, что может применяться любой другой многогранник или геометрия, если она делает возможной передачу вращающего момента. Это относится соответственно к направленной радиально наружу четвертой функциональной поверхности 28 второго сегмента 20 инструмента.
Кроме того, в гнезде 14 первого сегмента 10 инструмента находится направленная радиально наружу первая функциональная поверхность 15, которая в настоящем примере осуществления образуется снабженным резьбой 34 выступом 11 третьего сегмента 30 инструмента. Альтернативно можно выполнить направленную радиально наружу первую функциональную поверхность 15 в виде части первого сегмента 10 инструмента. В представленном на фиг.2 примере осуществления функциональная поверхность 15 выполнена в виде конической поверхности.
Введенный в гнездо 14 вводный участок 24 второго сегмента 20 инструмента имеет из проксимального в дистальном направлении направленную радиально наружу первую функциональную поверхность 25, направленную радиально наружу вторую функциональную поверхность 26, направленную радиально наружу третью функциональную поверхность 27 и, как уже упомянуто выше, направленную радиально наружу четвертую функциональную поверхность 28.
Функциональные поверхности 25, 26 и 27 в представленном примере осуществления сужаются из проксимального в дистальном направлении к конечной точке 29 в направлении вводного участка 24. Направленная радиально наружу первая функциональная поверхность 25 второго сегмента 20 инструмента выполнена, как направленная радиально наружу первая функциональная поверхность 15 первого сегмента 20 инструмента, конической. Точно так же по меньшей мере одна из функциональных поверхностей 15 и 25 может быть выполнена в виде усеченного конуса.
Направленная радиально наружу вторая функциональная поверхность 26 дистально присоединяется к направленной радиально наружу функциональной поверхности 25 и выполнена в виде усеченного конуса. К функциональной поверхности 26 тоже присоединяется тоже выполненная в виде усеченного конуса функциональная поверхность 27. Она имеет на своем проксимальном конце меньший диаметр, чем тоже находящееся на этом проксимальном конце основание 21 усеченного конуса функциональной поверхности 26. При этом функциональной поверхностью 26 и функциональной поверхностью 27 образуется уступ. Поверхность уступа служит кольцевой опорной поверхностью 23, которая, как описано ниже, взаимодействует с удерживающей поверхностью 13 первого сегмента инструмента.
Как описано выше, инструмент 1 для передачи вращающего момента имеет по меньшей мере одну пару функциональных поверхностей, которая допускает между собой относительное движение, и по меньшей мере одну пару функциональных поверхностей, которая находится в сцеплении с геометрическим замыканием или с фрикционным замыканием.
Находящаяся в сцеплении пара функциональных поверхностей образует у инструмента устройство для передачи вращающего момента для передачи вращающего момента между сегментами инструмента. При помощи этого вращающего момента по меньшей мере одним из сегментов инструмента выполняется движение резания. Пара функциональных поверхностей, которая в своей контактной области допускает относительное движение, т.е. проскальзывание, в отличие от этого, предусмотрена для опирания и ведения между первым и вторым сегментом инструмента и таким образом передает силы в продольном направлении между сегментами инструмента.
Однако в представленном на фиг.2 примере осуществления применяются больше пар функциональных поверхностей, чтобы достичь как можно более определенного выполнения движения между первым сегментом 10 инструмента и вторым сегментом 20 инструмента.
Пара функциональных поверхностей, которая допускает между собой относительное движение, образуется функциональными поверхностями 15 и 25. Как описано выше, находящаяся в сцеплении пара функциональных поверхностей образуется функциональными поверхностями 18 и 28. При этом функциональные поверхности 18 и 28 находятся в сцеплении с геометрическим замыканием, которое почти всегда обеспечивает лучшую передачу вращающего момента, чем сцепление с фрикционным замыканием. Также диаметр расчетной окружности или, соответственно, делительной окружности находящихся в сцеплении функциональных поверхностей 18 и 28 находится примерно на высоте точки пересечения продольной оси L1 первого сегмента 10 инструмента и продольной оси L2 второго сегмента 20 инструмента.
Диаметр расчетной окружности или, соответственно, диаметр делительной окружности функциональной поверхности представляет собой диаметр, на котором лежат точки контакта, где соприкасаются периметры двух взаимодействующих функциональных поверхностей. Как в технике передач, отношением между диаметрами расчетной окружности двух элементов передачи, например, двух зубчатых колес, может определяться передаточное отношение. Так как диаметры расчетной окружности функциональных поверхностей 18 и 28 находятся на высоте точек пересечения между продольными осями L1 и L2, а продольная ось L1 образует среднюю точку диаметра расчетной окружности функциональной поверхности 18, а также продольная ось L2 среднюю точку диаметра расчетной окружности функциональной поверхности 28, оба диаметра расчетной окружности имеют примерно одинаковую величину, так что передаточное отношение составляет примерно 1:1.
Также в изображенном на фиг.2 примере осуществления предусмотрена пара функциональных поверхностей, которая поддерживает вводный участок 24 в гнезде 14. При этом речь идет о направленной радиально внутрь второй функциональной поверхности 16 первого сегмента 10 инструмента и направленной радиально наружу второй функциональной поверхности 26 второго сегмента 20 инструмента. Альтернативно или дополнительно в качестве поддерживающей пары функциональных поверхностей может быть предусмотрена пара функциональных поверхностей, которая имеет направленную радиально внутрь третью функциональную поверхность 17 первого сегмента 10 инструмента и направленную радиально наружу третью функциональную поверхность 27 второго сегмента 20 инструмента.
Поверхности поддерживающей и ведущей пары функциональных поверхностей обкатываются друг по другу. Следовательно, они не допускают между собой по существу никакого относительного движения и также не предусмотрены для передачи вращающего момента.
Взаимодействие между тремя парами функциональных поверхностей в настоящем примере осуществления дополняется опиранием опорной поверхности 23 на удерживающую поверхность 13 в гнезде 14. В частности, опирание опорной поверхности 23 на удерживающую поверхность 13 служит для определенного контакта между функциональными поверхностями 15 и 25 и функциональными поверхностями 26 и 16. Одновременно вводный участок 24 второго сегмента 20 инструмента надежно удерживается в гнезде 14 первого сегмента 10 инструмента.
Для введения вводного участка 24 в гнездо 14, так чтобы опорная поверхность 23 второго сегмента 20 инструмента в проксимальном направлении могла попадать за удерживающую поверхность 13 первого сегмента 10 инструмента, предпочтительно некоторый участок вводного участка 24 и/или направленной радиально наружу функциональной поверхности 15 выполнен упруго податливым. Альтернативно или дополнительно введение вводного участка 24 может осуществляться за счет того, что сегмент 10 инструмента ввертывается, после того как вводный участок 24 второго сегмента 20 инструмента был вдвинут через дистальное отверстие гнезда 14.
Однако в простейшем случае вводный участок 24 и гнездо 14 выполнены с такими размерами, что введение вводного участка 24 возможно без предусмотренной специально для этого упругой податливости или блокирования выступом 11 третьего сегмента инструмента. При этом удерживающая поверхность 13 и опорная поверхность 23 по существу предотвращают непреднамеренное вываливание второго сегмента 20 инструмента из первого сегмента 10 инструмента, однако не с такой же гарантией, как описанные выше два варианта осуществления. Зато в этом варианте осуществления особенно просто возможна смена первого сегмента 10 инструмента.
Привод сегмента 20 инструмента осуществляется с помощью показанного на фиг.1 зажимного элемента 36. Вводимое им вращение передается прямо на первый сегмент 10 инструмента. Передача вращающего момента от первого сегмента 10 инструмента ко второму сегменту 20 инструмента осуществляется после этого, как описано выше, через введенный в гнездо 14 вводный участок 24 на высоте пары 18, 28 функциональных поверхностей. Однако выполнение кинематического движения решающим образом определяется парой 15, 25 функциональных поверхностей, а также парой 16, 26 функциональных поверхностей и/или парой 17, 27 функциональных поверхностей.
Как описано выше, путь инструмента 1 через костную ткань получается за счет предварительного сверления, распределения плотности кости в костной ткани и/или мозговой полости кости, подлежащей лечению. При этом сегмент 20 инструмента почти всегда ищет себе путь наименьшего сопротивления. Таким образом, этот путь наименьшего сопротивления ведет сегмент 20 инструмента.
Если сначала ведется только сегмент 20 инструмента, например, когда в костной ткани находится только он, получаются две уже описанные выше возможности движения между первым сегментом 10 инструмента и вторым сегментом 20 инструмента. Во-первых, вводный участок 24, имеющий продольную ось L2, может совершать относительное движение по траектории в виде круглого двойного конуса вокруг продольной оси L1 первого сегмента 10 инструмента. Одновременно в этом состоянии вращение может передаваться от первого сегмента 10 инструмента ко второму сегменту 20 инструмента.
Относительное движение вводного участка 24 по траектории в виде круглого двойного конуса вокруг продольной оси L1 первого сегмента 10 инструмента получается, со ссылкой на фиг.2, вследствие заданного посредством функциональной поверхности 15 и функциональной поверхности 16 круглого пути инструмента. Альтернативно круглому пути инструмента возможны также другие пути инструмента, такие как, например, путь инструмента, который вследствие соответственно выполненной геометрии функциональной поверхности 16 и функциональной поверхности 15 волнообразно проходит вокруг продольной оси L1. При таком варианте осуществления угол α между продольной осью L1 и L2 изменяется в зависимости от углового положения продольной оси L1 относительно продольной оси L2.
Если изображенный на фиг.2 первый сегмент 10 инструмента ведется, например, рукой хирурга, первый сегмент 10 инструмента и второй сегмент 20 инструмента остаются в одном и том же положении относительно глобальной системы координат, например, положении, изображенном на фиг.2 или 3. Угол α между сегментами 10 и 20 инструмента получается из угла между двумя продольными осями L1 и L2, который, в свою очередь, определяется углом конуса функциональных поверхностей 15 и 25.
Далее описываются некоторые возможные возможности модификации варианта осуществления, показанного на фиг.2 и 3.
В варианте осуществления простейшей конструкции передача вращения и опирание осуществляется между функциональными поверхностями 15, 25 и 16, причем, во-первых, в месте, в котором соприкасаются функциональные поверхности 15 и 25, а во-вторых, в месте, расположенном диаметрально противоположно этому месту, в котором функциональные поверхности 25 и 16 соприкасаются.
В этом варианте осуществления функциональные поверхности должны быть соответственно геометрически адаптированы. Например, направленная радиально внутрь вторая функциональная поверхность 16 первого сегмента 10 инструмента может сужаться в проксимальном направлении. И в этом варианте осуществления есть пара функциональных поверхностей, которая допускает между собой относительное движение, и пара функциональных поверхностей, посредством которой становится возможной передача вращающего момента. Однако пары функциональных поверхностей в этом варианте осуществления пересекаются.
Если пара функциональных поверхностей, которая допускает между собой относительное движение, является парой функциональных поверхностей из направленной радиально наружу относительно продольной оси L1 первой функциональной поверхности 15 и направленной радиально наружу относительно продольной оси L2 первой функциональной поверхности 25, то пара функциональных поверхностей, которая делает возможной передачу вращения или, соответственно, вращающего момента, находится между второй функциональной поверхностью 16 и первой функциональной поверхностью 25. В этом случае первый сегмент 10 инструмента и второй сегмент 20 инструмента вращаются в одном и том же направлении.
В зависимости от выбора данных диаметров расчетной окружности функциональной поверхности 25 и функциональной поверхности 16 возможно, чтобы второй сегмент 20 инструмента вращался относительно сегмента 10 инструмента со скоростью, отличающейся на отношение между диаметрами расчетной окружности. Наряду с простой конструкцией при этом варианте осуществления возможно повышение частоты вращения от первого сегмента 10 инструмента ко второму сегменту 20 инструмента.
В другом альтернативном варианте осуществления передача вращающего момента между функциональными поверхностями 15 и 25 может осуществляться, когда допускается относительное движение между функциональными поверхностями 16 и 25. И здесь скорость вращения между двумя сегментами 10 и 20 инструмента зависит от отношения диаметров расчетной окружности двух функциональных поверхностей 15 и 25. Однако вдобавок к этому в этом варианте осуществления второй сегмент 20 инструмента вращается в противоположном направлении по отношению к первому сегменту 10 инструмента. Следовательно, в этом варианте осуществления наряду с передаточным отношением, имеет место изменение направления вращения на противоположное.
Для достижения более стабильных кинематических свойств сегментов 10 и 20 инструмента по отношению друг к другу могут быть предусмотрены две отдельные пары функциональных поверхностей. При переносе на фиг.2, первая пара функциональных поверхностей могла бы образовываться из функциональных поверхностей 15 и 25, а вторая пара функциональных поверхностей из функциональных поверхностей 16 и 26. Альтернативно могла бы также применяться одна из остающихся пар 17 и 27 или 18 и 28 функциональных поверхностей.
В этом варианте осуществления происходит, например, относительное движение межу парой 15, 25 функциональных поверхностей, в то время как передача вращательного движения осуществляется за счет сцепления между парой 16, 26 функциональных поверхностей. Как описано выше, в этом случае сегмент 10 инструмента и сегмент 20 инструмента вращаются в одном и том же направлении, при этом угловые скорости сегмента 10 инструмента относительно сегмента 20 инструмента зависят от отношения диаметра расчетной окружности функциональной поверхности 26 к функциональной поверхности 16.
В обратном случае, т.е. при сцеплении между функциональными поверхностями 15 и 25, в также относительном движении между функциональными поверхностями 16 и 26, направление вращения между сегментами 10 и 20 инструмента противоположно направлению предыдущего варианта осуществления. Для скорости вращения справедливо, в свою очередь, отношение друг к другу диаметров расчетной окружности.
Также в описанных модификациях предпочтительно на первом сегменте инструмента предусматривается удерживающая поверхность 13, а на втором сегменте инструмента опорная поверхность 23.
Также в этих модификациях имеется разница скоростей вращения двух сегментов инструмента, так как передача вращающего момента, в отличие от примера осуществления на фиг.2, лежит не на высоте точки пересечения между продольной осью L1 первого сегмента 10 инструмента и продольной осью L2 второго сегмента 20 инструмента. Следовательно, диаметры расчетной окружности вводного участка 24 и гнезда 14 или, соответственно, третьего участка 30 инструмента отличаются друг от друга.
Также в соответствии с изобретением больше двух сегментов инструмента могут располагаться под углом друг к другу. Например, третий сегмент инструмента тоже может располагаться под углом к первому сегменту инструмента и так образовывать предопределенную для имплантата выемку, имеющую два угла.
Настоящий инструмент предусмотрен, в частности, для имплантатов, которые имплантируются в трубчатые кости. К ним относятся, в частности, бедренные имплантаты, так как здесь, с учетом искривленного прохождения естественной шейки бедра, особенно предпочтительно свойство инструмента, быть в состоянии подготавливать предусмотренное под углом отверстие.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Инструмент
10 Первый сегмент инструмента
11 Выступ в гнезде
12 Режущий элемент
13 Удерживающая поверхность в гнезде
14 Гнездо
15 Направленная радиально наружу (первая) функциональная поверхность первого сегмента инструмента
16 Направленная радиально внутрь (вторая) функциональная поверхность первого сегмента инструмента
17 Направленная радиально внутрь (третья) функциональная поверхность первого сегмента инструмента
18 Направленная радиально внутрь (четвертая) функциональная поверхность первого сегмента инструмента
19 Резьбовое отверстие
20 Второй сегмент инструмента
21 Дистальное основание усеченного конуса, образованного функциональной поверхностью 26
22 Режущий элемент
23 Опорная поверхность
24 Вводный участок
25 Направленная радиально наружу (первая) функциональная поверхность второго сегмента инструмента
26 Направленная радиально наружу (вторая) функциональная поверхность второго сегмента инструмента
27 Направленная радиально наружу (третья) функциональная поверхность второго сегмента инструмента
28 Направленная радиально наружу (четвертая) функциональная поверхность второго сегмента инструмента
29 Конечная точка вводного участка
30 Третий сегмент инструмента
32 Режущий элемент
34 Резьбовой участок
36 Зажимной элемент
I16 Внутренний размер второй функциональной поверхности первого сегмента инструмента
I17 Внутренний размер третьей функциональной поверхности первого сегмента инструмента
I18 Внутренний размер четвертой функциональной поверхности первого сегмента инструмента
L1 Первая продольная ось
L2 Вторая продольная ось
α Угол между продольными осями L1 и L2
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ФИКСАЦИИ КОСТЕЙ | 2013 |
|
RU2641859C2 |
| ОТВЕРТКА И ВИНТ ДЛЯ ХИРУРГИЧЕСКОГО ПРИМЕНЕНИЯ | 2017 |
|
RU2763816C2 |
| ЗУБНОЙ ИМПЛАНТАТ, ИНСТРУМЕНТ ДЛЯ ВСТАВКИ ЗУБНОГО ИМПЛАНТАТА И КОМБИНАЦИЯ ЗУБНОГО ИМПЛАНТАТА И ИНСТРУМЕНТА ДЛЯ ВСТАВКИ | 2017 |
|
RU2791007C2 |
| ЗУБНОЙ ИМПЛАНТАТ, ИНСТРУМЕНТ ДЛЯ ВСТАВКИ ЗУБНОГО ИМПЛАНТАТА И КОМБИНАЦИЯ ЗУБНОГО ИМПЛАНТАТА И ИНСТРУМЕНТА ДЛЯ ВСТАВКИ | 2017 |
|
RU2687575C1 |
| ЗУБНОЙ ИМПЛАНТАТ ДЛЯ СБОРА И РАСПРЕДЕЛЕНИЯ КОСТИ | 2015 |
|
RU2680124C1 |
| МЕЖТЕЛОВОЙ ИМПЛАНТ ДЛЯ СТАБИЛИЗАЦИИ ШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА И УСТРОЙСТВО ДЛЯ ЕГО УСТАНОВКИ | 2020 |
|
RU2778201C2 |
| НАПРАВЛЯЮЩАЯ РЕЗАНИЯ ДЛЯ СОЗДАНИЯ НАРУЖНОГО КОНТУРА ДЛЯ ЭНДОПРОТЕЗА СУСТАВА | 2012 |
|
RU2599680C2 |
| МЕЖПОЗВОНКОВАЯ ВСТАВКА И СЦЕПЛЕННАЯ С НЕЙ ПЛАСТИНА В СБОРЕ | 2009 |
|
RU2506930C2 |
| ПОЗВОНОЧНЫЙ ИМПЛАНТАТ, ИНСТРУМЕНТ ДЛЯ ИЗГОТОВЛЕНИЯ И СПОСОБ ПРИМЕНЕНИЯ | 2012 |
|
RU2550973C2 |
| КОРРЕКТИРУЕМЫЕ УСТРОЙСТВА ДЛЯ ЛЕЧЕНИЯ АРТРИТА КОЛЕНА | 2013 |
|
RU2626961C2 |
Группа изобретений относится к медицине. Инструмент для создания выемки в костной ткани для имплантата имеет: первый продолговатый сегмент инструмента, имеющий первую продольную ось и гнездо, второй продолговатый сегмент инструмента, имеющий вторую продольную ось и вводный участок. Гнездо имеет вокруг первой продольной оси направленную по существу радиально наружу первую поверхность и направленную радиально внутрь вторую поверхность. Вводный участок может вводиться в гнездо первого сегмента инструмента. Вводный участок имеет вокруг второй продольной оси по меньшей мере одну направленную радиально наружу поверхность, которая взаимодействует с направленной наружу первой поверхностью первого сегмента инструмента, и одна из указанной по меньшей мере одной поверхности вводного участка взаимодействует со второй поверхностью первого сегмента инструмента. Первая продольная ось и вторая продольная ось пересекаются. Одна из взаимодействующих пар поверхностей для передачи вращающего момента находится в сцеплении друг с другом, а другая из взаимодействующих пар поверхностей допускает между собой относительное движение. По меньшей мере один из сегментов инструмента на обращенной наружу окружной поверхности имеет по меньшей мере один режущий элемент. Сегмент инструмента для создания выемки в костной ткани для помещения имплантата имеет продольную ось, вокруг которой для введения другого сегмента инструмента выполнено гнездо, которое имеет отверстие, по меньшей мере одну направленную радиально внутрь поверхность, концевую поверхность, которая по меньшей мере на отдельных участках образована направленной радиально наружу поверхностью. Одна из этих поверхностей предусмотрена для передачи вращающего момента к другому сегменту инструмента, а другая поверхность предназначена, чтобы допускать относительное движение относительно другого сегмента инструмента. Предлагается комплект для имплантации вышеуказанного инструмента и имплантата, в частности эндопротеза, который может вставляться в выемку, создаваемую в костной ткани с помощью этого инструмента. Группа изобретений обеспечивает более щадящую для кости подготовку места имплантации и одновременно возможность снабжения анатомически адаптированным и, тем не менее, щадящим кость имплантатом. 3 н. и 8 з.п. ф-лы, 3 ил.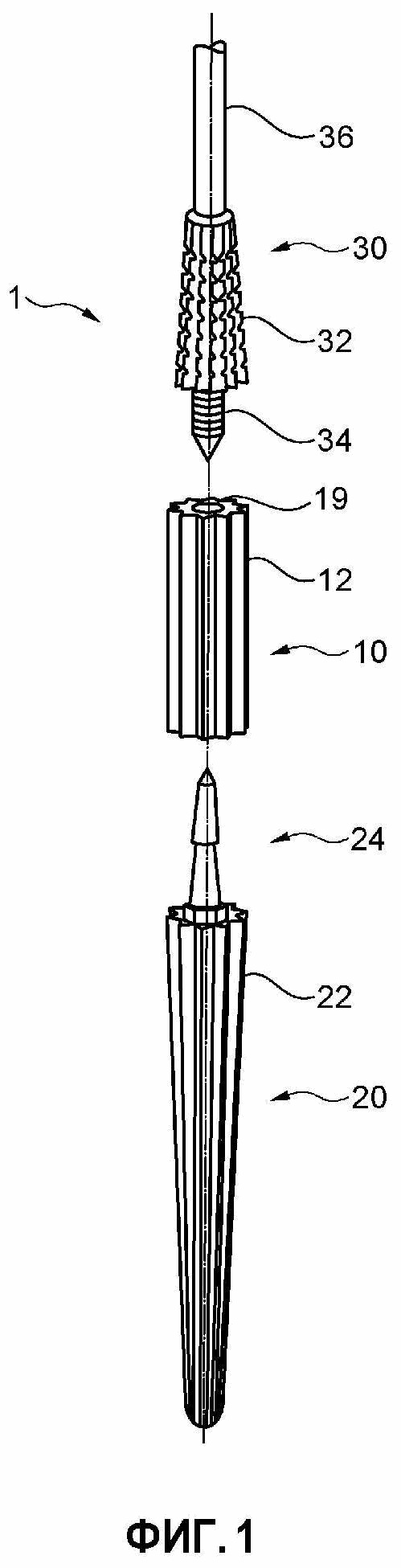
1. Инструмент (1) для создания выемки в костной ткани для имплантата, причем этот инструмент имеет:
первый продолговатый сегмент (10) инструмента, имеющий первую продольную ось (L1) и гнездо (14), причем это гнездо имеет вокруг первой продольной оси направленную по существу радиально наружу первую поверхность (15) и направленную радиально внутрь вторую поверхность (16, 17, 18),
второй продолговатый сегмент (20) инструмента, имеющий вторую продольную ось (L2) и вводный участок (24), который может вводиться в гнездо первого сегмента инструмента, причем этот вводный участок имеет вокруг второй продольной оси по меньшей мере одну направленную радиально наружу поверхность (25, 26, 27, 28), которая взаимодействует с направленной наружу первой поверхностью (15) первого сегмента инструмента, и одна из указанной по меньшей мере одной поверхности (25, 26, 27, 28) вводного участка взаимодействует со второй поверхностью (16, 17, 18) первого сегмента инструмента,
при этом первая продольная ось и вторая продольная ось пересекаются, одна из взаимодействующих пар (15, 16, 17, 18, 25, 26, 27, 28) поверхностей для передачи вращающего момента находится в сцеплении друг с другом, а другая из взаимодействующих пар (15, 16, 17, 18, 25, 26, 27, 28) поверхностей допускает между собой относительное движение, и
при этом по меньшей мере один из сегментов (10, 20, 30) инструмента на обращенной наружу окружной поверхности имеет по меньшей мере один режущий элемент (12, 22, 32).
2. Инструмент (1) по п.1, у которого первая поверхность (15) первого сегмента (10) инструмента образуется выступом (11) в гнезде (14), причем этот выступ является предпочтительно коническим или цилиндрическим.
3. Инструмент (1) по одному из предыдущих пунктов, у которого находящаяся в сцеплении пара (15, 16, 17, 18, 25, 26, 27, 28) поверхностей для передачи вращающего момента находится в сцеплении с геометрическим замыканием.
4. Инструмент (1) по одному из предыдущих пунктов, у которого поперечные сечения поверхностей (15, 16, 17, 18, 25, 26, 27, 28) по меньшей мере одной пары поверхностей перпендикулярно соответствующей продольной оси (L1, L2) имеют по существу круглый периметр.
5. Инструмент (1) по одному из предыдущих пунктов, у которого первый сегмент (10) инструмента и второй сегмент (20) инструмента имеют по меньшей мере две отдельные взаимодействующие между ними пары (15, 16, 17, 18, 25, 26, 27, 28) поверхностей.
6. Инструмент (1) по одному из пп.1-4, у которого первый сегмент (10) инструмента и второй сегмент (10) инструмента имеют по меньшей мере три отдельные, взаимодействующие между ними пары (15, 16, 17, 18, 25, 26, 27, 28) поверхностей, при этом первая пара (15, 25) поверхностей допускает между собой относительное движение, вторая пара (16, 26) поверхностей поддерживает вводный участок (24) в гнезде (14), и вращающий момент может передаваться между первым и вторым сегментами инструмента с помощью третьей пары поверхностей (18, 28).
7. Инструмент (1) по одному из предыдущих пунктов, у которого направленная наружу поверхность (15) первого сегмента (10) инструмента может сменяться и предпочтительно является частью третьего сегмента (30) инструмента.
8. Инструмент (1) по одному из предыдущих пунктов, у которого гнездо (14) первого сегмента (10) инструмента имеет удерживающую поверхность (13), которая образована расширением поперечного сечения внутри гнезда, и на которую во введенном состоянии опирается соответствующее ей расширение поперечного сечения вводного участка (24), так что второй сегмент инструмента удерживается в первом сегменте инструмента.
9. Инструмент (1) по одному из предыдущих пунктов, у которого на высоте точки пересечения первой продольной оси (L1) и второй продольной оси (L2) расположена пара поверхностей, которая включает в себя направленную радиально наружу поверхность (26, 27, 28) вводного участка (24) и направленную радиально внутрь поверхность (16, 17, 18) гнезда (14), и эта пара поверхностей предпочтительно предназначена для передачи вращающего момента.
10. Сегмент (10) инструмента для создания выемки в костной ткани для помещения имплантата, имеющий продольную ось (L1), вокруг которой для введения другого сегмента (20) инструмента выполнено гнездо, которое имеет отверстие, по меньшей мере одну направленную радиально внутрь поверхность (16, 17, 18) и концевую поверхность, которая по меньшей мере на отдельных участках образована направленной радиально наружу поверхностью (15), при этом одна из этих поверхностей (15, 16, 17, 18) предусмотрена для передачи вращающего момента к другому сегменту инструмента, а другая поверхность (15, 16, 17, 18) предназначена, чтобы допускать относительное движение относительно другого сегмента инструмента.
11. Комплект для имплантации из инструмента по одному из пп.1-9 и имплантата, в частности эндопротеза, который может вставляться в выемку, создаваемую в костной ткани с помощью этого инструмента.
| US 5908423 A1, 01.06.1999 | |||
| Устройство для испытания газовых электрических разрядников | 1960 |
|
SU132334A1 |
| US 20150119892 A1, 30.04.2015 | |||
| US 20150320427 A1, 12.11.2015 | |||
| US 20150173777 A1, 25.06.2015 | |||
| WO 2014185887 A1, 20.11.2014 | |||
| US 20140081272 A1, 20.03.2014. | |||

