Область изобретения в целом относится к медицинским устройствам для лечения остеоартрита колена.
Остеоартрит колена представляет собой дегенеративное заболевание коленного сустава, которое поражает большое число пациентов, в частности в возрасте старше 40 лет. Распространенность этого заболевания значительно возросла за последние несколько десятилетий, что частично, но не полностью, связано с ростом возраста популяции, а также ростом ожирения. Увеличение также может быть обусловлено увеличением очень активных людей в популяции. Остеоартрит колена вызван преимущественно длительным напряжением колена, которое разрушает хрящ, покрывающий суставные поверхности костей в коленном суставе. Часто проблема усугубляется после конкретного травматического события, но также это может быть наследственный процесс. Симптомы включают боль, скованность, уменьшенный объем движения, отек, деформацию, мышечную слабость и некоторые другие. Остеоартрит может включать один или несколько из трех компартментов колена: медиальный компартмент большеберцово-бедренного сустава, латеральный компартмент большеберцово-бедренного сустава и надколенно-бедренный сустав. В тяжелых случаях, частичную или полную замену колена осуществляют для того, чтобы заменить пораженные части новыми несущими нагрузку поверхностями для колена, типично выполненными из пластмасс или металлов сортов для имплантантов. Эти операции включают значительную послеоперационную боль и требуют существенной физиотерапии. Период восстановления может длиться недели или месяцы. Существуют некоторые потенциальные осложнения этого хирургического вмешательства, в том числе тромбоз глубоких вен, утрата движения, инфекции и перелом кости. После восстановления хирургические пациенты, которые получили замену одного компартмента или всего колена, должны значительно снижать свою активность, полностью исключая бег и энергичные виды спорта из своего образа жизни.
По этим причинам хирурги пытаются вмешиваться на более ранней стадии для того, чтобы задерживать или даже предотвращать хирургическое вмешательство для замены колена. Остеотомические хирургические вмешательства можно осуществлять на бедренной кости или большой берцовой кости для того, чтобы менять угол между бедренной костью и большой берцовой костью и таким образом корректировать напряжения в различных частях коленного сустава. При закрытой клиновидной или клин-закрывающей остеотомии удаляют угловой клин кости, а остающиеся поверхности соединяют вместе, создавая новый улучшенный угол кости. При открытой клиновидной остеотомии в кости выполняют разрез и открывают края разреза, создавая новый угол. Костный трансплантат часто используют для того, чтобы заполнять новое открытое клиновидное пространство, и часто пластину прикрепляют к кости с использованием костных винтов. Получение правильного угла во время остеотомии любого из этих типов почти всегда происходит субоптимально, и даже если результат близок к тому, чего хотели, может иметь место последующая утрата угла коррекции. Некоторые другие осложнения, переносимые при использовании этого способа, включают несрастание и отказ материала.
В первом варианте осуществления изобретения система для изменения угла кости субъекта содержит корректируемый исполнительный механизм, который имеет внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе, магнитную компоновку, выполненную с возможностью корректировать длину корректируемого исполнительного механизма через осевое движение внутреннего стержня и внешнего корпуса по отношению друг к другу, первую крепежную скобу, выполненную для соединения с внешним корпусом, и вторую крепежную скобу, выполненную для соединения с внутренним стержнем, где приложение перемещающего магнитного поля снаружи субъекта перемещает магнитную компоновку так, что внутренний стержень и внешний корпус перемещаются по отношению друг к другу.
В другом варианте осуществления изобретения система для изменения угла кости субъекта содержит магнитную компоновку, которая имеет радиально-полюсной магнит, соединенный со стержнем, который имеет внешнюю резьбу, и блок, который имеет внутреннюю резьбу и соединен со стержнем, где вращательное движение радиально-полюсного магнита заставляет стержень вращаться и перемещаться по оси по отношению к блоку. Система дополнительно содержит верхнюю поверхность контакта с костью и нижнюю поверхность контакта с костью, которые имеют корректируемое расстояние, где осевое движение стержня в первом направлении вызывает увеличение расстояния.
В другом варианте осуществления изобретения система для изменения угла кости субъекта содержит ножничную компоновку, которая имеет первое и второе плечи ножниц, поворотно соединенные через петлю, первое и второе плечи ножниц соединены, соответственно, с верхней и нижней поверхностями контакта с костью, выполненными с возможностью перемещаться относительно друг друга. Система дополнительно содержит полую магнитную компоновку, которая содержит перемещаемый по оси ведущий винт, расположенный в ней, где полая магнитная компоновка выполнена с возможностью вращения в ответ на перемещающее магнитное поле и где указанное вращение переходит в осевое движение ведущего винта. Система дополнительно содержит компоновку храповика, соединенную на одном конце с ведущим винтом и на другом конце с одним из первого и второго плечей ножниц, компоновка храповика содержит собачку, выполненную с возможностью зацепления с зубцами, расположенным на одной из верхней и нижней поверхностей контакта с костью, и где осевое движение ведущего винта продвигает собачку вдоль зубцов и перемещает верхнюю и нижнюю поверхности контакта с костью друг от друга.
В другом варианте осуществления изобретения способ подготовки большой берцовой кости к имплантации смещающего имплантата включает выполнение первого разреза в коже пациента в местоположении, смежным с плато большой берцовой кости на большой берцовой кости пациента, создание первой полости в большой берцовой кости посредством удаления костного материала вдоль первой оси, идущей по существу в продольном направлении от первой точки на плато большой берцовой кости ко второй точке, размещение экскавационного устройства внутри первой полости, экскавационное устройство содержит основное удлиненное тело и выполнено с возможностью извлекать большую берцовую кость асимметрично по отношению к первой оси, создание второй полости в большой берцовой кости с использованием экскавационного устройства, где вторая полость сообщается с первой полостью и идет по существу в направлении одной стороны большой берцовой кости, и удаление экскавационного устройства.
В другом варианте осуществления изобретения способ имплантирования неинвазивно корректируемой системы для изменения угла большой берцовой кости пациента включает выполнение остеотомии между первой частью и второй частью большой берцовой кости, выполнение первого разреза в коже пациента в местоположении, смежном с плато большой берцовой кости на большой берцовой кости пациента, создание первой полости в большой берцовой кости вдоль первой оси, идущей по существу в продольном направлении от первой точки на плато большой берцовой кости ко второй точке, размещение экскавационного устройства внутри первой полости, экскавационное устройство выполнено с возможностью извлекать большую берцовую кость асимметрично по отношению к первой оси, создание второй полости в большой берцовой кости с использованием экскавационного устройства, где вторая полость идет по существу в направлении одной стороны большой берцовой кости, размещение неинвазивно корректируемого имплантата через первую полость и по меньшей мере частично во второй полости, неинвазивно корректируемый имплантат содержит корректируемый исполнительный механизм, который имеет внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе, соединение внешнего корпуса с первой частью большой берцовой кости и соединение внутреннего стержня со второй частью большой берцовой кости. В некоторых вариантах осуществления имплантат также можно корректировать инвазивно, например, минимально инвазивно.
В другом варианте осуществления изобретения способ подготовки кости к имплантации имплантата включает выполнение первого разреза в коже пациента, создание первой полости в кости посредством удаления костного материала вдоль первой оси, идущей по существу в продольном направлении от первой точки на плато большой берцовой кости ко второй точке, размещение экскавационного устройства внутри первой полости, экскавационное устройство содержит основное удлиненное тело и выполнено с возможностью извлекать кость асимметрично по отношению к первой оси, экскавационное устройство дополнительно содержит шарнирный рычаг, который имеет первый конец и второй конец, рычаг содержит уплотняющую поверхность, создание второй полости в кости с использованием экскавационного устройства, где вторая полость сообщается с первой полостью и идет по существу в направлении одной стороны кости, и удаление экскавационного устройства.
В другом варианте осуществления изобретения способ подготовки кости к имплантации имплантата включает выполнение первого разреза в коже пациента, создание первой полости в кости посредством удаления костного материала вдоль первой оси, идущей по существу в продольном направлении от первой точки на плато большой берцовой кости ко второй точке, размещение экскавационного устройства внутри первой полости, экскавационное устройство содержит основное удлиненное тело и выполнено с возможностью извлекать кость асимметрично по отношению к первой оси, экскавационное устройство дополнительно содержит шарнирный рычаг, который имеет первый конец и второй конец, рычаг содержит истирающую поверхность, создание второй полости в кости с использованием экскавационного устройства, где вторая полость сообщается с первой полостью и идет по существу в направлении одной стороны кости, и удаление экскавационного устройства.
В другом варианте осуществления изобретения, способ подготовки кости к имплантации имплантата включает выполнение первого разреза в коже пациента, создание первой полости в кости посредством удаления костного материала вдоль первой оси, идущей по существу в продольном направлении от первой точки на плато большой берцовой кости ко второй точке, размещение экскавационного устройства внутри первой полости, экскавационное устройство содержит основное удлиненное тело и выполнено с возможностью извлекать кость асимметрично по отношению к первой оси, экскавационное устройство дополнительно содержит вращающийся режущий инструмент, выполненный для перемещения по существу в направлении одной стороны кости, пока вращают вращающийся режущий инструмент, создание второй полости в кости с использованием экскавационного устройства, где вторая полость сообщается с первой полостью и идет по существу в направлении одной стороны кости, и удаление экскавационного устройства.
В другом варианте осуществления изобретения система для изменения угла кости субъекта содержит неинвазивно корректируемый имплантат, который содержит корректируемый исполнительный механизм, который имеет внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе, внешний корпус выполнен для соединения с первой частью кости, и внутренний стержень выполнен для соединения со второй частью кости, ведущий элемент, выполненный с возможностью перемещать внутренний стержень по отношению к внешнему корпусу, и экскавационное устройство, которое содержит основное удлиненное тело, выполненное с возможностью вставляться внутрь первой полости кости вдоль первой оси, экскавационное устройство выполнено с возможностью извлекать кость асимметрично по отношению к первой оси для того, чтобы создавать вторую полость, сообщающуюся с первой полостью, где корректируемый исполнительный механизм выполнен с возможностью соединения с костью по меньшей мере частично внутри второй полости.
В другом варианте осуществления изобретения способ изменения угла кости включает выполнение остеотомии между первой частью и второй частью большой берцовой кости пациента; создание полости в большой берцовой кости посредством удаления костного материала вдоль оси, идущей по существу в продольном направлении от первой точки на плато большой берцовой кости ко второй точке; размещение неинвазивно корректируемого имплантата в полости, неинвазивно корректируемый имплантат содержит корректируемый исполнительный механизм, который имеет внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе, и ведущий элемент, выполненный с возможностью удаленного приведения в действие для того, чтобы телескопически смещать внутренний стержень по отношению к внешнему корпусу; соединение одного из внешнего корпуса или внутреннего стержня с первой частью большой берцовой кости; соединение другого из внешнего корпуса или внутреннего стержня со второй частью большой берцовой кости; и удаленное приведение в действие ведущего элемента для того, чтобы телескопически смещать внутренний стержень по отношению к внешнему корпусу, таким образом, измеряя угол между первой частью и второй частью большой берцовой кости.
В другом варианте осуществления изобретения, система для изменения угла большой берцовой кости субъекта, имеющего остеоартрит колена, содержит неинвазивно корректируемый имплантат, который содержит корректируемый исполнительный механизм, выполненный с возможностью размещения внутри продольной полости внутри большой берцовой кости и имеющий внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе, внешний корпус выполнен с возможностью соединения с первой частью большой берцовой кости, и внутренний стержень выполнен с возможностью соединения со второй частью большой берцовой кости, вторая часть большой берцовой кости отделена по меньшей мере частично от первой части большой берцовой кости посредством остеотомии; и ведущий элемент, который содержит постоянный магнит и выполненный с возможностью удаленного приведения в действие для того, чтобы телескопически смещать внутренний стержень по отношению к внешнему корпусу.
В другом варианте осуществления изобретения, система для изменения угла кости субъекта содержит неинвазивно корректируемый имплантат, который содержит корректируемый исполнительный механизм, который имеет внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе, внешний корпус связан с первым анкерным отверстием, и внутренний стержень связан со вторым анкерным отверстием, первое анкерное отверстие выполнено с возможностью пропускать первый анкер для соединения корректируемого исполнительного механизма с первой частью кости, и второе анкерное отверстие выполнено с возможностью пропускать второй анкер для соединения корректируемого исполнительного механизма со второй частью кости, вторая часть кости по меньшей мере частично отделена от первой части кости посредством остеотомии; ведущий элемент, выполненный с возможностью удаленного приведения в действие для того, чтобы телескопически смещать внутренний стержень по отношению к внешнему корпусу; и где неинвазивно корректируемый имплантат выполнен с возможностью быть неограниченным по углу по отношению по меньшей мере к одной из первой части кости или второй части кости при соединении как с первой частью, так и со второй частью кости.
На фиг. 1 проиллюстрировано желаемое расположение коленного сустава по отношению к бедренной кости и большой берцовой кости.
На фиг. 2 проиллюстрирован коленный сустав с неправильным расположением и связанным остеоартритом медиального компартмента.
На фиг. 3 проиллюстрирован открытый клиновидный способ в большой берцовой кости.
На фиг. 4 проиллюстрирован открытый клиновидный способ с использованием костного трансплантата и прикрепленной пластины.
На фиг. 5 проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии, размещенное в большой берцовой кости согласно первому варианту осуществления настоящего изобретения, размещенному в большой берцовой кости.
На фиг. 6 проиллюстрирован вид неинвазивно корректируемого устройства для клиновидной остеотомии с фиг. 5.
На фиг. 7 проиллюстрирован детализированный вид нижнего зажима неинвазивно корректируемого устройства для клиновидной остеотомии с фиг. 5 и 6.
На фиг. 8 проиллюстрирован вариант осуществления магнитно корректируемого имплантата.
На фиг. 9 проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии на основе пружинного элемента согласно второму варианту осуществления настоящего изобретения.
На фиг. 10 проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии на основе сочлененного подъемного устройства согласно третьему варианту осуществления настоящего изобретения.
На фиг. 11 проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии с фиг. 9, вставляемое в клиновидное отверстие в большой берцовой кости.
На фиг. 12 проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии на основе ножничного подъемника согласно четвертому варианту осуществления настоящего изобретения.
На фиг. 13 проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии с фиг. 12 с удаленной верхней поверхностью контакта с костью, чтобы показать механизм ножничного подъемника.
На фиг. 14 проиллюстрирован вид в разрезе неинвазивно корректируемого устройства для клиновидной остеотомии с фиг. 12 и 13.
На фиг. 15 проиллюстрирован вид в перспективе внешнего корректирующего устройства.
На фиг. 16 проиллюстрирован разборный вид магнитного ручного блока внешнего корректирующего устройства с фиг. 15.
На фиг. 17 проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии согласно пятому варианту осуществления настоящего изобретения.
На фиг. 18 проиллюстрирован вид в разрезе неинвазивно корректируемого устройства для клиновидной остеотомии с фиг. 17.
На фиг. 19 проиллюстрирован разборный вид неинвазивно корректируемого устройства для клиновидной остеотомии с фиг. 17.
На фиг. 20-27 проиллюстрирован способ имплантирования и приведения в действие неинвазивно корректируемого устройства для клиновидной остеотомии для поддержания или корректировки угла при открытой клиновидной остеотомии большой берцовой кости пациента.
На фиг. 28 проиллюстрированы оси вытяжения в большой берцовой кости.
На фиг. 29-31 проиллюстрирован способ имплантирования и приведения в действие неинвазивно корректируемого устройства для клиновидной остеотомии для поддержания или корректировки угла при клин-закрывающей остеотомии большой берцовой кости пациента.
На фиг. 32 проиллюстрирована система для экскавации костного материала согласно первому варианту осуществления настоящего изобретения.
На фиг. 33 проиллюстрирован вращающийся режущий инструмент из системы с фиг. 32.
На фиг. 34 проиллюстрирован вид сбоку вращающегося режущего инструмента с фиг. 33.
На фиг. 35 проиллюстрирован вид в разрезе вращающегося режущего инструмента с фиг. 34, выполненном по линии 35-35.
На фиг. 36 проиллюстрирован блок привода из системы с фиг. 32 с удаленными крышками.
На фиг. 37 проиллюстрирована система с фиг. 32 на месте внутри большой берцовой кости.
На фиг. 38 проиллюстрирована система с фиг. 32 после удаления костного материала из большой берцовой кости.
На фиг. 39 проиллюстрирована система для экскавации костного материала согласно второму варианту осуществления настоящего изобретения в месте внутри большой берцовой кости.
На фиг. 40 проиллюстрирована система с фиг. 39 в развернутой конфигурации внутри большой берцовой кости.
На фиг. 41 проиллюстрирован вид с торца рычага, который имеет истирающую поверхность, в качестве части экскавационного устройства из системы с фиг. 39.
На фиг. 42 проиллюстрирована система для экскавации костного материала согласно третьему варианту осуществления настоящего изобретения в месте внутри большой берцовой кости.
На фиг. 43 проиллюстрирована система с фиг. 42 в развернутой конфигурации внутри большой берцовой кости.
На фиг. 44 проиллюстрирован вид с торца рычага, который имеет уплотняющую поверхность, в качестве части экскавационного устройства из системы с фиг. 42.
На фиг. 45A проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии согласно шестому варианту осуществления настоящего изобретения.
На фиг. 45B проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии с фиг. 45A в виде в перспективе.
На фиг. 46 проиллюстрирован детализированный вид неинвазивно корректируемого устройства для клиновидной остеотомии с фиг. 45B, выполненный внутри круга 46.
На фиг. 47 проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии с фиг. 45A в первом положении вытяжения.
На фиг. 48 проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии с фиг. 45A во втором положении вытяжения.
На фиг. 49 проиллюстрирован вид в разрезе неинвазивно корректируемого устройства для клиновидной остеотомии с фиг. 45A в первом положении вытяжения.
На фиг. 50 проиллюстрирован вид в разрезе неинвазивно корректируемого устройства для клиновидной остеотомии с фиг. 45A во втором положении вытяжения.
На фиг. 51 проиллюстрирована втулка неинвазивно корректируемого устройства для клиновидной остеотомии с фиг. 45A.
На фиг. 52-55 проиллюстрирован способ имплантирования и приведения в действие неинвазивно корректируемого устройства для клиновидной остеотомии с фиг. 45A для поддержания или корректировки угла при открытой клиновидной остеотомии большой берцовой кости пациента.
На фиг. 56A-56D проиллюстрированы конфигурации костных винтов для неинвазивно корректируемого устройства для клиновидной остеотомии с фиг. 45A.
На фиг. 57 проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии согласно седьмому варианту осуществления настоящего изобретения.
На фиг. 58 проиллюстрирован костный анкер для использования с неинвазивно корректируемым устройством для клиновидной остеотомии с фиг. 57.
На фиг. 59-61 проиллюстрирован способ имплантирования и приведения в действие неинвазивно корректируемого устройства для клиновидной остеотомии с фиг. 57 для поддержания или корректировки угла при открытой клиновидной остеотомии большой берцовой кости пациента.
На фиг. 62 проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии согласно восьмому варианту осуществления настоящего изобретения в первом положении вытяжения.
На фиг. 63 проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии с фиг. 62 во втором положении вытяжения.
На фиг. 64A проиллюстрирован магнитно корректируемый исполнительный механизм неинвазивно корректируемого устройства для клиновидной остеотомии согласно одному из вариантов осуществления настоящего изобретения во время удаления магнитной компоновки.
На фиг. 64B проиллюстрирован магнитно корректируемый исполнительный механизм с фиг. 64A после удаления магнитной компоновки.
На фиг. 64C проиллюстрирован магнитно корректируемый исполнительный механизм с фиг. 64A после замены крышки корпуса исполнительного механизма.
На фиг. 65A проиллюстрирован магнитно корректируемый исполнительный механизм неинвазивно корректируемого устройства для клиновидной остеотомии согласно одному из вариантов осуществления настоящего изобретения перед удалением радиально-полюсного постоянного магнита.
На фиг. 65B проиллюстрирован магнитно корректируемый исполнительный механизм с фиг. 65A во время удаления радиально-полюсного постоянного магнита.
На фиг. 65C проиллюстрирован магнитно корректируемый исполнительный механизм с фиг. 64 после удаления радиально-полюсного постоянного магнита и замены крышки магнитного корпуса.
На фиг. 65D проиллюстрирован магнитно корректируемый исполнительный механизм с фиг. 64 после замены крышки корпуса исполнительного механизма.
На фиг. 66-69 схематически проиллюстрированы различные варианты осуществления альтернативных источников ведущего элемента неинвазивно корректируемого устройства для клиновидной остеотомии.
ПОДРОБНОЕ ОПИСАНИЕ ПРОИЛЛЮСТРИРОВАННЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На фиг. 1 проиллюстрировано стандартное расположение бедренной кости 100, большой берцовой кости 102 и коленного сустава 104, где тазобедренный сустав (головка 108 бедренной кости), коленный сустав 104 и голеностопный сустав (по срединной линии дистальной части большой берцовой кости 110) ориентированы вдоль одной линии 112. Малая берцовая кость 106 показана рядом с большой берцовой костью 102. Коленный сустав 104 с фиг. 2 представлен в состоянии артрита, при котором поврежден медиальный компартмент 114, что ведет к тому, что линия 112 проходит медиальнее центра коленного сустава 104.
На фиг. 3 проиллюстрирована открытая клиновидная остеотомия 118, созданная посредством выполнения надреза вдоль линии 120 надреза, и раскрытия угла α клина. На фиг. 4 проиллюстрировано конечное определение этого открытого клина посредством размещения материала 122 костного трансплантата внутри открытой клиновидной остеотомии 118 и затем размещение пластины 124, которую затем прикрепляют к большой берцовой кости 102 винтами 126 для большой берцовой кости.
На фиг. 5 проиллюстрирована большая берцовая кость 102 с имплантированным неинвазивно корректируемым устройством 128 для клиновидной остеотомии. Неинвазивно корректируемое устройство 128 для клиновидной остеотомии показано без большой берцовой кости 102 на фиг. 6. Неинвазивно корректируемое устройство 128 для клиновидной остеотомии содержит исполнительный механизм 142, который содержит внешний корпус 130 и внутренний стержень 132, телескопически соединенный внутри внешнего корпуса 130 для неинвазивной продольной корректировки. Для того чтобы имплантировать неинвазивно корректируемое устройство 128 для клиновидной остеотомии, отверстие 138 сверлят в большой берцовой кости 102, и затем выполняют разрез вдоль линии 120 надреза. Затем в отверстие 138 вставляют исполнительный механизм 142, сначала дистальный конец 140. Клиновидное отверстие 144 открывают настолько, чтобы иметь возможность вставлять нижнюю крепежную скобу 136 и верхнюю крепежную скобу 134. Нижняя крепежная скоба 136, как видно на фиг. 7, имеет отверстие 146 и внутренний диаметр 148, который позволяет надевать ее на периферическую канавку 150 вокруг внешнего корпуса 130. Затем нижнюю крепежную скобу 136 прикрепляют к большой берцовой кости 102 в нижней части 152 клиновидного отверстия 144 посредством размещения костных винтов (не показано) через винтовые отверстия 154. Затем верхнюю крепежную скобу 134 вдвигают на место и прикрепляют к проксимальному концу 156 исполнительного механизма 142 посредством затягивания зажимного винта 158, который навинчивается через резьбовое отверстие во внутреннем стержне 132 исполнительного механизма 142. Затем верхнюю крепежную скобу 134 прикрепляют к большой берцовой кости 102 в верхней части 162 клиновидного отверстия 144 посредством размещения костных винтов (не показано) через винтовые отверстия 164.
На фиг. 8 проиллюстрирован магнитно корректируемый исполнительный механизм 142, который можно использовать в вариантах осуществления с фиг. 5-7 или других вариантах осуществления, описанных в настоящем документе. Внутренний стержень 132, имеющий конец 160, телескопически корректируют внутри внешнего корпуса 130 посредством магнитной компоновки 166, содержащейся в нем. Магнитная компоновка 166 содержит радиально-полюсной цилиндрический магнит 168, который входит в зацепление с одной или несколькими ступенями 170 планетарной передачи. Ступени 170 планетарной передачи выходят на ведущий винт 172. В некоторых вариантах осуществления конечная ступень 170 передачи может быть шарнирно закреплена на ведущем винте 172 с использованием высокопрочного штыря, например, штыря, сконструированного из нержавеющей стали 400 серии. Внутренний стержень 132 содержит полость 174, в которой закрепляют гайку 176, которая имеет внутреннюю резьбу, которую сопрягают с наружной резьбой ведущего винта 172. Радиальная несущая 178 и упорная несущая 180 позволяют магнитной компоновке 166 работать с относительно низким трением. Кольцевое уплотнение 182 удерживают внутри периферической канавки на внутренней стороне стенки внешнего корпуса 130, и внутренний диаметр кольцевого уплотнения 182 динамически уплотняет внешний диаметр внутреннего стержня 132.
Возвращаясь к фиг. 5, неинвазивно корректируемое устройство 128 для клиновидной остеотомии используют для того, чтобы постепенно раскрывать клиновидное отверстие 144 с течением времени. Посредством приложения перемещающего магнитного поля из внешнего местоположения по отношению к пациенту, например, после восстановления пациента от хирургического вмешательства, исполнительный механизм 142 с фиг. 6 можно постепенно удлинять (например, приблизительно на один (1) мм в сутки), позволяя клиновидному отверстию 144 достигать желаемого угла, который можно тестировать посредством выполнения пациентом различных двигательных исследований (шаги, повороты и т.д.), до тех пор, пока не достигают наиболее комфортного состояния. Постепенное удлинение может предоставлять возможность остеогенеза по Илизарову, при котором новый костный материал формируют в клиновидном отверстии по мере его раскрывания. Таким образом, может не требоваться костный трансплантат. После того, как достигают желаемого угла клиновидного отверстия 144, вновь выросший костный материал можно оставлять укрепляться. Если во время процесса удлинение происходило слишком быстро или новая кость не достаточно укрепилась, перемещающее магнитное поле можно применять в противоположном направлении, тем самым укорачивая исполнительный механизм 142, чтобы добавлять сжатие и создавать подходящие размеры для формирования костной мозоли. После подтверждения того, что имело место достаточное формирование костной мозоли, удлинение можно возобновлять с той же скоростью или с другой скоростью. Когда удлинение выполнят в достаточной мере и укрепленная кость стабильна, может быть желательно удалять все неинвазивно корректируемое устройство 128 для клиновидной остеотомии или только магнитную компоновку 166.
На фиг. 9 проиллюстрировано неинвазивно корректируемое устройство 184 для клиновидной остеотомии, которое содержит магнитную компоновку 192, которая содержит магнит, например, радиально-полюсной цилиндрический магнит 186, который соединяют с приводным винтом 188. По мере того, как радиально-полюсной цилиндрический магнит 186 поворачивают с помощью прикладываемого снаружи перемещающего магнитного поля, приводной винт 188 поворачивается внутри блока 190, который имеет внутреннюю резьбу, заставляя приводной винт 188 и магнитную компоновку 192 двигаться в первом осевом направлении (A). Когда магнитная компоновка 192 двигается по оси, она толкает изогнутую пластинчатую пружину 194 с памятью формы (например, суперэластический Nitinol®) в соединительной точке 196. Упорная несущая 198 в соединительной точке 196 позволяет продолжать вращение радиально-полюсного цилиндрического магнита 186, когда усилие возрастает. Поскольку внутреннюю кривизну 200 пластинчатой пружины 194 из Nitinol толкают в первом осевом направлении (A), ширина (W) пластинчатой пружины 194 из Nitinol возрастает. Вырез 202 в пластинчатой пружине 194 из Nitinol предоставляет пространство для поворота и перемещения радиально-полюсного цилиндрического магнита 186 в первом осевом направлении (A).
На фиг. 10 проиллюстрировано неинвазивно корректируемое устройство для клиновидной остеотомии 216, похожее на неинвазивно корректируемое устройство 184 для клиновидной остеотомии с фиг. 9, за исключением того, что пластинчатую пружину 194 из Nitinol с фиг. 9 заменяют на сочлененное подъемное устройство 204. Сочлененное подъемное устройство 204 содержит нижнюю пластину 206 и верхнюю пластину 208, которую прикрепляют к блоку 190 посредством штырей 210, которые позволяют каждой пластине 206 и 208 увеличивать угловое положение вдоль стрелок (B). Пластины 206 и 208 прикрепляют к внутренним пластинам 212 и 214 посредством штырей 210. Шарнирную структуру внутренних пластин 212, 214 толкают вперед сходно с тем, как пластинчатую пружину 194 из Nitinol толкают в первом осевом направлении (A) на фиг. 9.
На фиг. 11 проиллюстрировано неинвазивно корректируемое устройство 184 для клиновидной остеотомии, помещенное в клиновидное отверстие 144 в большой берцовой кости 102. Неинвазивно корректируемое устройство для клиновидной остеотомии 216 с фиг. 10 можно вставлять аналогичным образом.
На фиг. 12-14 проиллюстрировано неинвазивно корректируемое устройство 218 для клиновидной остеотомии на основе ножничного подъемника. Неинвазивно корректируемое устройство 218 для клиновидной остеотомии содержит основной корпус 220, который имеет нижнюю поверхность 222 контакта с костью и верхнюю поверхность 224 контакта с костью, верхнюю поверхность 224 контакта с костью можно корректировать относительно основного корпуса 220 и нижней поверхности 222 контакта с костью. На фиг. 13 представлено неинвазивно корректируемое устройство 218 для клиновидной остеотомии с удаленной верхней поверхностью 224 контакта с костью, чтобы лучше рассмотреть внутренние компоненты. Ножничная компоновка 225 содержит первую часть 226 ножниц и вторую часть 228 ножниц, которые можно соединять с помощью центрального штыря 230 по типу петли. Дистальные рычаги 234 и 238 частей 226 и 228 ножниц можно соединять с дистальными концами нижней поверхности 222 контакта с костью и верхней поверхности 224 контакта с костью посредством штырей 240. Рычаг 232 второй части 228 ножниц соединяют с промежуточным соединителем 242 магнитной компоновки 244 с использованием штыря 240. Полая магнитная компоновка 246 имеет внутреннюю резьбу 247, которая входит в зацепление с внешней резьбой 249 ведущего винта 248, который прикрепляют к промежуточному соединителю 242. Полая магнитная компоновка 246 может содержать полый радиально-полюсной магнит. Промежуточный соединитель 242 содержит собачку 251, которая способна входить в зацепление с зубцами 253 храповой пластины 255. Когда приложенное снаружи перемещающее магнитное поле заставляет магнит 246 вращаться, ведущий винт 248 и промежуточный соединитель 242 перемещаются в первом осевом направлении (A), что заставляет ножничную компоновку 225 раскрываться и, таким образом, увеличивать расстояние (D) между нижней поверхностью 222 контакта с костью и верхней поверхностью 224 контакта с костью. Рычаг 236 первой части 226 ножниц способен скользить внутри канала 257 в верхней поверхности 224 контакта с костью. Собачка 251 и зубцы 253 храповой пластины 255 формируют односторонний храповик, который позволяет увеличивать расстояние (D), но не уменьшать его.
На фиг. 15 проиллюстрировано внешнее корректирующее устройство 1180, которое используют для того, чтобы неинвазивно корректировать устройства и системы, описанные в настоящем документе. Внешнее корректирующее устройство 1180 содержит магнитный ручной блок 1178, управляющий блок 1176 и источник 1174 питания. Управляющий блок 1176 содержит панель 1182 управления, которая имеет одно или несколько средств управления (кнопки, переключатели или тактильные датчики, датчики перемещения, звука или света) и дисплей 1184. Дисплей 1184 может быть визуальным, звуковым, тактильным и тому подобное или представлять собой некоторую комбинацию указанных выше признаков. Внешнее корректирующее устройство 1180 может содержать программное обеспечение, которое позволяет врачу создавать программы.
На фиг. 16 представлены подробности о магнитном ручном блоке 1178 внешнего корректирующего устройства 1180. Как видно на фиг. 16, имеют место множество, например, два (2), магнитов 1186, которые имеют цилиндрическую форму (также возможны другие геометрические формы). Магниты 1186 можно выполнять из редкоземельных магнитов, и в некоторых вариантах осуществления могут быть радиально-полюсными. Магниты 1186 приклеивают или иным образом закрепляют внутри магнитных чашек 1187. Магнитные чашки 1187 содержат стержень 1198, который прикрепляют к первому магнитному зубчатому колесу 1212 и второму магнитному зубчатому колесу 1214, соответственно. Ориентацию полюсов каждых двух магнитов 1186 сохраняют по отношению друг к другу посредством системы передач (с использованием центрального зубчатого колеса 1210, которое находится в зацеплении как с первым магнитным зубчатым колесом 1212, так и со вторым магнитным зубчатым колесом 1214). В одном из вариантов осуществления северный полюс одного из магнитов 1186 поворачивается синхронно с южным полюсом другого магнита 1186, с совпадением вращательных положений на всем протяжении всего вращения. Известно, что конфигурация обеспечивает усовершенствованную доставку крутящего момента, например, на цилиндрический магнит 168 или магнит 246. Примеры способов и вариантов осуществления внешних корректирующих устройств, которые можно использовать для того, чтобы корректировать неинвазивно корректируемое устройство 218 для клиновидной остеотомии, или другие варианты осуществления настоящего изобретения описаны в патенте США № 8382756, раскрытие которого, таким образом, включено посредством ссылки в полном объеме, и патентной заявке США с серийным № 13/172,598, которая опубликована под номером публикации 2012-0004494 A1, раскрытие которых, таким образом, включено посредством ссылки в полном объеме.
Компоненты магнитного ручного блока 1178 удерживают вместе между пластиной 1190 магнита и передней пластиной 1192. Большинство компонентов защищено крышкой 1216. Магниты 1186 вращаются внутри статичной крышки 188 магнита с тем, чтобы магнитный ручной блок 1178 мог покоиться непосредственно на пациенте, при этом не передавая какого-либо перемещения на внешние поверхности пациента. Перед вытяжением костномозгового удлиняющего устройства 1110, оператор помещает магнитный ручной блок 1178 поверх пациента около местоположения цилиндрического магнита 1134. Отклонитель 1194 магнитов, который расположен между двумя магнитами 1186, содержит смотровое окно 1196, которое облегчает размещение. Например, отметку, выполненную на коже пациента в подходящем местоположении нестираемым маркером, можно видеть через смотровое окно 1196. Для того чтобы осуществлять вытяжение, оператор держит магнитный ручной блок 1178 за его ручки 1200 и нажимает переключатель 1228 вытяжения, заставляя двигатель 1202 совершать движение в первом направлении. Двигатель 1202 имеет коробку 1206 передач, которая делает скорость вращения на выходе с зубчатого колеса 1204 отличающейся от скорости вращения двигателя 1202 (например, более низкая скорость). Затем выходное зубчатое колесо 1204 поворачивает понижающее зубчатое колесо 1208, которое входит в зацепление с центральным зубчатым колесом 1210, заставляя его поворачиваться с другой скоростью вращения, нежели понижающее зубчатое колесо 1208. Центральное зубчатое колесо 1210 входит в зацепление как с первым магнитным зубчатым колесом 1212, так и со вторым магнитным зубчатым колесом 1214, поворачивая их со скоростями, которые идентичны друг другу. В зависимости от части организма, где расположены магниты 1186 внешнего корректирующего устройства 1180, желательно, чтобы эта скорость была управляемой, чтобы минимизировать получаемую плотность индуцированного тока, задаваемую посредством магнита 1186 и цилиндрического магнита 1134 через ткани и текучие вещества организма. Например, предусмотрена скорость вращения магнита 60 об./мин или меньше, несмотря на то, что можно использовать другие скорости, такие как 35 об./мин или меньше. В любое время вытяжение можно уменьшать посредством нажатия переключателя 1230 сокращения, что может быть желательным, если пациент чувствует значительную боль или онемение в области, где держат устройство.
На фиг. 17-19 проиллюстрировано неинвазивно корректируемое устройство 300 для клиновидной остеотомии, которое содержит магнитно корректируемый исполнительный механизм 342, который имеет первый конец 326 и второй конец 328. Внутренний стержень 332, имеющий полость 374, телескопически соединен внутри внешнего корпуса 330, который содержит корпус 312 для вытяжения и корпус 306 коробки передач. По меньшей мере одно поперечное отверстие 305 проходит через торцевую крышку 302, расположенную на первом конце 326 магнитно корректируемого исполнительного механизма 342. Торцевую крышку 302 можно герметично прикреплять к корпусу 306 коробки передач посредством кольцевого сварного соединения 390. Второе сварное соединение 392 герметично прикрепляет корпус 312 для вытяжения к корпусу 306 коробки передач. Одно или несколько поперечных отверстий 364 проходят через внутренний стержень 332. Одно или несколько поперечных отверстий 364 и по меньшей мере одно поперечное отверстие 305 позволяют проходить по меньшей мере одному стопорному винту. В некоторых вариантах осуществления используют только одно поперечное отверстие 364 и одно поперечное отверстие 305 для того, чтобы предоставлять больше вращательной свободы между магнитно корректируемым исполнительным механизмом 342 и стопорными винтами, когда корректируют магнитно корректируемый исполнительный механизм 342. Одна или несколько продольных канавок 372 на внешней поверхности внутреннего стержня 332 входят по типу шпонки в зацепление с выпячиваниями 375 в кольце 373, предотвращающем вращение, которое входит в зацепление с подрезами внутри конца корпуса 312 для вытяжения на плоском крае 384 кольца 373, предотвращающего вращение. Один или несколько направляющих гребней 383 в кольце 373, предотвращающем вращение, могут удерживать кольцо 373, препятствующее вращению, вращательно статичным в прорезях 391 в корпусе 312 для вытяжения.
Содержимое магнитно корректируемого исполнительного механизма 342 защищено от текучих веществ организма одним или несколькими уплотнительными кольцами 334, располагающимися в периферических канавках 382 во внутреннем стержне 332, которые динамически формируют уплотнение с внутренней поверхностью корпуса 312 для вытяжения. Внутренний стержень 332 приводят в движение по оси относительно внешнего корпуса 330 посредством ведущего винта 348, который поворачивают с помощью цилиндрического радиально-полюсного магнита 368. Цилиндрический радиально-полюсной магнит 368 прикрепляют внутри первого корпуса 308 магнита и второго корпуса 310 магнита и поворотно удерживают на штыре 336 на одном конце с помощью радиальной несущей 378, которая непосредственно входит в зацепление с цековкой 304 торцевой крышки 302. Второй корпус 310 магнита выходит к первой ступени 367 из трех ступеней 370 планетарной передачи. Планетарные зубчатые колеса 387 трех ступеней 370 планетарной передачи поворачиваются внутри внутренних зубцов 321 внутри корпуса 306 коробки передач. Первая ступень 367 выходит на вторую ступень 369, а вторая ступень 369 выходит на третью ступень 371. Третью ступень 371 соединяют с ведущим винтом 348 посредством стопорного штыря 385, который проходит через сквозные отверстия 352 как в выходе третьей ступени 371, так и в ведущем винте 348. Соединитель 339 ведущего винта также удерживается на ведущем винте 348 с помощью штыря 385, который проходит через отверстие 359. Ведущий винт 348 по резьбе входит в зацепление с гайкой 376, которую прикрепляют внутри полости 374 внутреннего стержня 332. Каждая ступень 370 планетарной передачи содержит передаточное отношение 4:1, что дает общее передаточное отношение 64:1, так что 64 оборота цилиндрического радиально-полюсного магнита 368 ведут к одному обороту ведущего винта 348. Упорная несущая 380 удерживается свободно в осевом направлении между буртиками в корпусе 306 коробки передач. Соединитель 339 ведущего винта содержит буртик 355, который схож с противоположным буртиком (не показано) на основании ведущего винта 348. Если внутренний стержень 332 отводят до минимальной длины, буртик на основании ведущего винта 348 упирается в буртик 355 соединителя ведущего винта, гарантируя, что ведущий винт 348 не сможет зажать гайку при слишком высоком крутящем моменте. Упорную несущую 380 удерживают между буртиком 393 в корпусе 306 коробки передач и вставкой 395 на конце корпуса 306 коробки передач. Упорная несущая 380 служит для того, чтобы защищать цилиндрический радиально-полюсной магнит 368, ступени 370 планетарной передачи, корпуса 308 и 310 магнита и радиальную несущую 378 от повреждения из-за сжатия. Удерживающий элемент 346, который содержит тонкую дугу из магнитного материала, такого как нержавеющая сталь «400 серии», прикрепляют внутри корпуса 306 коробки передач, смежно с цилиндрическим радиально-полюсным магнитом 368, и может притягивать полюс цилиндрического радиально-полюсного магнита 368, для того, чтобы минимизировать вероятность вращения цилиндрического радиально-полюсного магнита 368, когда его не корректируют с помощью внешнего корректирующего устройства 1180, например, во время движения пациента.
Неинвазивно корректируемое устройство 300 для клиновидной остеотомии имеет возможность увеличивать или уменьшать свою длину по меньшей мере приблизительно на три миллиметра в каждом направлении в одном из вариантов осуществления и приблизительно на девять миллиметров в каждом направлении в другом варианте осуществления. Неинвазивно корректируемое устройство 300 для клиновидной остеотомии может достигать усилия вытяжения в 240 фунтов, когда магнитный ручной блок 1178 внешнего корректирующего устройства 1180 помещают с тем, чтобы магниты 1186 находились в половине дюйма от цилиндрического радиально-полюсного магнита 368. Большинство компонентов неинвазивно корректируемого устройства для клиновидной остеотомии можно создавать из титана или титановых сплавов, таких как Titan-6A1-4V, кобальт-хром, нержавеющая сталь или другие сплавы. При имплантации неинвазивно корректируемое устройство 300 для клиновидной остеотомии можно вставлять руками или можно прикреплять к вставляющему инструменту (например, направляющая втулка для сверления). Поверхность 366 контакта, содержащую внутреннюю резьбу 397, располагают в торцевой крышке 302 для обратимого зацепления с наружной резьбой вставляющего инструмента. Альтернативно, эти признаки можно располагать на конце 360 внутреннего стержня 332. Дополнительно можно прикреплять отсоединяемый трос к любому концу неинвазивно корректируемого устройства 300 для клиновидной остеотомии с тем, чтобы его можно было легко снимать, если он размещен некорректно.
На фиг. 20-27 проиллюстрирован способ имплантирования и приведения в действие неинвазивно корректируемого устройства 125 для клиновидной остеотомии для изменения угла большой берцовой кости пациента. На фиг. 20 представлен вид спереди правого коленного сустава 104 пациента с остеоартритом колена, включая бедренную кость 100, большую берцовую кость 102 и малую берцовую кость 106. Неинвазивно корректируемое устройство 125 для клиновидной остеотомии можно помещать в направлении медиальной стороны большой берцовой кости 102 (вдали от малой берцовой кости 106). Кость большой берцовой кости 102, таким образом, подготавливают для того, чтобы сделать возможным нецентральное размещение неинвазивно корректируемого устройства для клиновидной остеотомии. Разрез выполняют в коже на медиальной стороне большой берцовой кости 102 и выполняют открытую клиновидную остеотомию 118 относительно точки 107 поворота, посредством создания первого разреза 103, например, с использованием осциллирующей пилы, и раскрытия открытой клиновидной остеотомии 118, как видно на фиг. 21. Типичное местоположение точки 107 поворота можно описать с помощью расстояний X и Y на фиг. 20. В некоторых вариантах осуществления X=10 мм и Y=15 мм. В точке поворота обыкновенно выполняют маленькое высверленное отверстие и помещают верхушечный штырь, например, верхушечный штырь диаметром приблизительно от 3 мм приблизительно до 4 мм. Теперь открытая клиновидная остеотомия 118 разделяет первую часть 119 и вторую часть 121 большой берцовой кости 102.
Как видно на фиг. 22, разрез выполняют в коже, сверло 111 помещают на центральном плато 101 большой берцовой кости и сверлят первую полость 109, которая имеет первую ось 117, от плато 101 большой берцовой кости вниз к костномозговому каналу большой берцовой кости 102. Во время этой стадии сверления может быть желательно помещать временный клин 123 в открытую клиновидную остеотомию 118 для того, чтобы поддерживать стабильность. Диаметр сверла приблизительно 12 мм или меньше или более предпочтительно приблизительно 10 мм или меньше используют для того, чтобы создавать первую полость 109. На фиг. 23 и 24 проиллюстрированы обобщенные стадии для создания второй полости 115. Здесь несколько вариантов осуществления представлены с помощью экскавационного устройства 113, которое вставляют в первую полость 109 через отверстие на плато 101 большой берцовой кости. Затем формируют вторую полость 115 по одну сторону от первой полости 109, в этом случае с медиальной стороны. Как показано на фиг. 25, после удаления экскавационного устройства 113 неинвазивно корректируемое устройство 125 для клиновидной остеотомии, имеющее внешний корпус 129 и внутренний стержень 127, вставляют в первую полость 109. На фиг. 25, неинвазивно корректируемое устройство 125 для клиновидной остеотомии показано с внутренним стержнем 127, обращенным вверх к пациенту, но в некоторых ситуациях может быть желательно имплантировать неинвазивно корректируемое устройство 125 для клиновидной остеотомии с внутренним стержнем 127, обращенным вниз. Первое поперечное отверстие 135 и второе поперечное отверстие 137 в неинвазивно корректируемом устройстве 125 для клиновидной остеотомии выполняют с возможностью размещения костных анкеров, например, стопорных винтов.
На фиг. 26 неинвазивно корректируемое устройство 125 для клиновидной остеотомии после этого помещают во вторую полость 115 и закрепляют первым анкером 131 через первое поперечное отверстие 135 и вторым анкером 133 через второе поперечное отверстие 137. На основе вычислений, выполненных по рентгеновским и другим изображениям, полученным до и/или во время хирургического вмешательства, угол α1 клина задают между первой частью 119 и второй частью 121 большой берцовой кости. После восстановления после хирургического вмешательства, пациент может возвращаться к сеансу динамической визуализации (например, рентгеновской), во время которой пациент стоит и даже выполняет движение в коленном суставе 104 для того, чтобы наилучшим образом подтвердить, делает ли угол α1 клина возможной оптимальную конформацию коленного сустава 104. Например, если в этот момент желательно увеличивать угол α1 клина, то магнитный ручной блок 1178 внешнего корректирующего устройства 1180 с фиг. 15 помещают на коленный сустав 104 пациента и приводят в действие с тем, чтобы вытягивать внутренний стержень 127 из внешнего корпуса 129, чтобы выполнять увеличение до большего угла α2 клина (фиг. 27). Может быть желательно, чтобы по меньшей мере один из анкеров (например, второй анкер 133) имел достаточный зазор в поперечном отверстии (например, второе поперечное отверстие 137) с тем, чтобы любое угловое положение, которое возникает, пока вытягивают неинвазивно корректируемое устройство 125 для клиновидной остеотомии, не прикладывало дополнительный изгибающий момент на неинвазивно корректируемое устройство 125 для клиновидной остеотомии. Сеанс динамической визуализации можно осуществлять в момент времени после хирургического вмешательства, когда спал отек, но прежде, чем укрепление кости станет значительным. Этот период может составлять приблизительно от одной до двух недель после хирургического вмешательства. Если выполняют корректировку (увеличение или уменьшение), дополнительный сеанс динамической визуализации можно осуществлять, например, неделей позже. Неинвазивно корректируемое устройство 125 для клиновидной остеотомии поставляют с тем, чтобы его можно было или удлинять или укорачивать, другими словами, с тем, чтобы впоследствии угол открытой клиновидной остеотомии 118 можно было увеличивать или уменьшать, в зависимости от определения желаемой коррекции.
Альтернативный способ определения количества раскрытия открытой клиновидной остеотомии 118 состоит в том, чтобы измерять, например, через радиографию, зазор G1, G2 на медиальном краю 181 открытой клиновидной остеотомии 118. В типичном диапазоне углов открытой клиновидной остеотомии 118 и типичном диапазоне размеров большой берцовой кости 102 пациента, зазор G1, G2, в миллиметрах обычно близок к углу клина α1, α2 в градусах. Например, G1 (мм) ≈ α1 (°); G2 (мм) ≈ α2 (°). Ожидают, что, если требуется коррекция, продуктивное удлинение следует выполнять со скоростью в диапазоне приблизительно 2 мм увеличения зазора (G) в сутки или меньше. Скорость увеличения зазора (GIR) можно определять как изменение зазора в миллиметрах в сутки. Один фактор, используемый при определении скорости увеличения зазора (GIR), заключается в использовании болевой переносимости пациента. Некоторые пациенты могут переносить большее количество боли, например, боль, обусловленную растяжением мягких тканей, и, таким образом, более высокой скоростью увеличения зазора (GIR). Другой фактор представляет собой количество роста кости, который имеет место. Один способ оценки количества роста кости выполняют с помощью радиографии. Предпочтительная скорость увеличения зазора (GIR) представляет собой ту, при которой внутри открытой клиновидной остеотомии 118 происходит рост кости, но не происходит раннее укрепление кости (укрепление, которое «заморозит» подвижность открытой клиновидной остеотомии 118, что сделает ее неспособной раскрываться больше). Может быть желательно специально имплантировать неинвазивно корректируемое устройство 125 для клиновидной остеотомии с уменьшенным начальным зазором (G0) с тем, чтобы идеальный зазор (Gi) можно было постепенно достигнуть через неинвазивную корректировку. Предусмотрено, что в течение периода корректировки можно осуществлять всего от одной до двенадцати процедур корректировки или больше, при общем количестве увеличения зазора (G) приблизительно от 1 мм приблизительно до 20 мм, например, во время периода корректировки в один месяц или меньше. Типично, период корректировки может покрывать приблизительно десять суток и содержать приблизительно десять процедур корректировки и общее количество увеличения зазора приблизительно от 5 мм приблизительно до 12 мм.
Посредством расположения неинвазивно корректируемого устройства 125 для клиновидной остеотомии медиально в большой берцовой кости, а не около осевой линии, больший момент можно прикладывать к первой части 119 и второй части 121 для того, чтобы раскрыть открытую клиновидную остеотомию 118 по отношению к точке 107 поворота. Дополнительно, для какого-либо конкретного усилия вытяжения, приложенного посредством неинвазивно корректируемого устройства 125 для клиновидной остеотомии, можно достигать большее количество вытяжения. На фиг. 28 представлены три различные оси вытяжения (A, B, C), которые представляют три возможных положения неинвазивно корректируемого устройства 125 для клиновидной остеотомии. Ось вытяжения A находится около срединной линии в большой берцовой кости 102, тогда как ось вытяжения B приблизительно на 11° отклоняется от срединной линии, а ось вытяжения C приблизительно на 22° отклоняется от срединной линии. Длина DB от точки 107 поворота до оси вытяжения B может составлять приблизительно на 32% больше, чем длина DA от точки 107 поворота до оси вытяжения A. Более значительно, длина Dc от точки 107 поворота до оси вытяжения C может составлять приблизительно на 60% больше, чем длина DA от точки 107 поворота до оси вытяжения A. Усилие вытяжения неинвазивно корректируемого устройства 125 для клиновидной остеотомии должно преодолевать ряд сопротивлений, расположенных по большой берцовой кости из-за эффекта натяжения мягких тканей. Размещение неинвазивно корректируемого устройства 125 для клиновидной остеотомии вдоль оси C и, таким образом, во второй полости 115 (фиг. 27), может допускать более эффективное вытяжение открытой клиновидной остеотомии 118.
На фиг. 29-31 проиллюстрирован способ имплантирования и приведения в действие неинвазивно корректируемого устройства 125 для клиновидной остеотомии для изменения угла большой берцовой кости пациента, но в отличие от открытой клиновидной остеотомии 118, представленной на фиг. 20-27, показана клин-закрывающая остеотомия 141. На фиг. 29 выполняют первый разрез 103, а на фиг. 30 выполняют второй разрез 105 и удаляют костный клин. Вторым разрезом 105 специально удаляют немного больше кости, чем необходимо, чтобы оптимизировать угол коррекции, и, как показано на фиг. 31, в клин-закрывающей остеотомии 141 оставляют небольшой зазор, позволяющий впоследствии корректировать ее в любом направлении (увеличивать или уменьшать угол). Способ имплантации продолжают, придерживаясь остальных стадий, описанных на фиг. 22-26, и угол клин-закрывающей остеотомии 141 можно увеличивать или уменьшать, как описано на фиг. 27.
На фиг. 32-36 проиллюстрирована первая система 400 для экскавации костного материала. Система 400 для экскавации костного материала выполнена с возможностью создания второй полости 115, как в целом описано на фиг. 22-24. Блок 404 привода соединен с вращающимся режущим инструментом 402 посредством гибкой цепи 408 привода. Вращающийся режущий инструмент 402 представляет собой вариант осуществления экскавационного устройства 113, как представлено на фиг. 23, но также может служить в качестве сверла 111 с фиг. 22. Вращающийся режущий инструмент 402, как изображено на фиг. 32-35, идет между первым концом 444 и вторым концом 446 (как показано на фиг. 34), и содержит дистальный расширитель 412, который соединяют с проксимальным расширителем 410. Как показано на фиг. 35, дистальный расширитель 412 содержит часть 440 малого диаметра, которая вставляется внутрь проксимального расширителя 410. Кольцевой зацепляющий элемент 434 удерживается на оси между дистальным расширителем 412 и проксимальным расширителем 410 и содержит несколько вырезов 435 (фиг. 34), расположенных по его окружности, которые образуют шкив. Дистальный расширитель 412, проксимальный расширитель 410 и кольцевой зацепляющий элемент 434 удерживаются вместе штырями 437, которые проходят через сквозные отверстия 436 и которые гарантируют, что все компоненты вращаются синхронно. Винт 438 крышки закрепляют внутри внутренней поверхности проксимального расширителя 410 с внутренней резьбой. Дистальный расширитель 412 дополнительно содержит сужение 442 и тупой кончик 414. Внешний диаметр вращающегося режущего инструмента 402 может составлять приблизительно 12 мм или меньше и более конкретно приблизительно 10 мм или меньше. Внешний диаметр проксимального расширителя 410 может составлять приблизительно 9 мм и внешний диаметр дистального расширителя может сужаться от приблизительно 9 мм до приблизительно 6,35 мм на тупом кончике 414. Блок 404 привода, как лучше всего видно на фиг. 32 и 36, содержит корпус 416 привода, закрытый закрывающей пластиной 418 шкива и закрывающей пластиной 420 привода. Несколько винтов 421 удерживают закрывающую пластину 420 привода на корпусе 416 привода, и четыре винта 426 удерживают закрывающую пластину 418 шкива на корпусе 416 привода. Корпус 416 привода не изображен на фиг. 36 для того, чтобы показать больше подробностей внутренних компонентов. На фиг. 32 ручка 406 прикреплена винтами 424 к пластине 422 для монтажа ручки, которая в свою очередь съемно прикреплена к корпусу 416 привода (например, винтами или зажимом).
Стержень 428 (фиг. 36), имеющий ребристый конец 430, выполнен с возможностью разъемного соединения с блоком 468 электросверла (фиг. 37 и 38). Большой шкив 450 прикрепляют к стержню 428 установочным винтом 451 с тем, чтобы вращение стержня 428 посредством блока 468 электросверла вызывало вращение большого шкива 450. Стержень 428 и большой шкив 450 удерживают между двумя шаровыми несущими 448 (нижняя шаровая несущая не видна), и регулировочную шайбу 464 и волнистую шайбу 466 располагают на любой стороне большого шкива 450 для того, чтобы контролировать количество осевого люфта. Роликовое колесо 452 поворотно прикрепляют к концу выдвижной планки 456 роликового колеса штырем 454. Выдвижная планка 456 роликового колеса способна скользить вдоль оси внутри корпуса 416 привода и закрывающей пластины 420 привода при ослаблении барашкового винта 432, резьбовой стержень которого входит в зацепление с внутренней резьбой 462 на выдвижной планке 456 роликового колеса. Выдвижную планку 456 роликового колеса можно закреплять посредством затягивания барашкового винта 432 с тем, чтобы она не скользила во время использования. Продольная щель 460 в выдвижной планке 456 роликового колеса контролирует общее количество осевого скольжения посредством предоставления первого конца 461 и второго конце 463, которые упираются в стопор 458.
Гибкая цепь 408 привода содержит маленький зубчатый ремень, например, ремень шириной приблизительно 3 мм из Kevlar® или полиуретана, армированного стекловолокном, который имеет крутящий момент проскальзывания больше чем 10 дюйм-унций, когда используют с большим шкивом 450 или кольцевым зацепляющим элементом 434. Один возможный образцовый крутящий момент проскальзывания составляет 13 дюйм-унций. Зубцы гибкой цепи привода можно располагать с шагом два миллиметра. На фиг. 37 представлен блок 404 привода системы 400 для экскавации костного материала, соединенный с блоком 468 электросверла. Блок 468 электросверла содержит корпус 476 двигателя, ручку 470 и батарейный блок 472. Ручка может содержать любое число интерфейсов, известных в данной области, для включения или выключения блока 468 электросверла или управления скоростью. В некоторых вариантах осуществления блок 468 электросверла можно включать непосредственно в стандартный источник мощности вместо батарейного блока 472. Ребристый конец 430 стержня 428 соединяют с соединителем 474 стержня блока 468 электросверла.
На фиг. 37 создана первая полость 109, гибкую цепь 408 привода вставляют через медиальный разрез и в открытую клиновидную остеотомию 118, между первой частью 119 и второй частью 121 большой берцовой кости. Вращающийся режущий инструмент 402 после этого помещают в первую полость 109 большой берцовой кости 102 с тем, чтобы оборачивать гибкую цепь 408 привода вокруг кольцевого зацепляющего элемента 434 вращающегося режущего инструмента 402. При ослабленном барашковом винте 432 корректируют желаемое количество натяжения в гибкой цепи 408 привода и затем барашковый винт 432 затягивают. При этом желаемом натяжении зубцы гибкой цепи 408 привода должны находиться в хорошем зацеплении с вырезами 435 (фиг. 34) кольцевого зацепляющего элемента 434 и роликовое колесо 452 должно поворотно контактировать с внешней поверхностью кольцевого зацепляющего элемента 434, стабилизируя его. Блок 468 электросверла приводят в действие, что заставляет большой шкив 450 с фиг. 36 вращать гибкую цепь 408 привода и, таким образом, вращать вращающийся режущий инструмент 402 через зацепление с кольцевым зацепляющим элементом 434 (фиг. 34). Диаметр большого шкива 450 может в два раза превышать кольцевой зацепляющий элемент 434, следовательно, заставляя вращающийся режущий инструмент 402 вращаться с одной второй от скорости на выходе из блока 468 электросверла. Другие соотношения также входят в объем данного изобретения. Может быть желательно управлять скоростью вращения вращающегося режущего инструмента 402 для того, чтобы минимизировать нагрев кости, окружающей костный материал, который вырезают, и, таким образом, ограничивать повреждение кости, которое может препятствовать нормальному росту во время процесса заживления. Пока блок 404 привода вращает вращающийся режущий инструмент 402, тянут ручку 406, заставляя вращающийся режущий инструмент 402 вырезать вторую полость 115, следуя пути 477 (фиг. 38). Проксимальный расширитель 410 режет внутри первой части 119 большой берцовой кости 102 и дистальный расширитель 412 режет внутри второй части 121 большой берцовой кости 102. После того, как создают вторую полость 115, барашковый винт 432 ослабляют и по меньшей мере частично уменьшают натяжение гибкой цепи 408 привода. После этого удаляют вращающийся режущий инструмент 402 и гибкую цепь 408 привода вытягивают из открытой клиновидной остеотомии 118. Тросовую линию можно прикреплять к вращающемуся режущему инструменту 402, например, через винт 438 крышки, чтобы прикладывать натяжение и, таким образом, способствовать удалению. Дополнительно между тросовой линией и вращающимся режущим инструментом 408 может содержаться шарнирное соединение для того, чтобы препятствовать перекручиванию тросовой линии.
На фиг. 39-41 проиллюстрирована вторая система 500 для экскавации костного материала. Система для экскавации костного материала содержит экскавационное устройство 502, которое имеет полый внешний стержень 508. Полый внешний стержень 508 имеет дистальный конец 507 и проксимальный конец 509, и его прикрепляют к ручке 510 внешнего стержня, которая выполнена так, чтобы ее можно было держать одной рукой для того, чтобы стабилизировать, или для того, чтобы перемещать экскавационное устройство 502. Корректирующий элемент 512, который имеет резьбовой конец 516, прикрепляют к корректирующей ручке 514. Резьбовой конец 516 входит по резьбе в зацепление с внутренней резьбой (не показано) внутри полого внешнего стержня 508 и поворот корректирующего элемента 512 посредством манипуляции корректирующей ручкой 514 перемещает корректирующий элемент 512 по оси по отношению к полому внешнему стержню 508. Полый внешний стержень 508 имеет вырезанную секцию 511 смежно с рычагом 504 на шарнире. Резьбовой конец 516 соединяют с рычагом 504 через звено 520. Звено 520 соединено с рычагом 504 в первой осевой точке 518 и звено 520 соединено с резьбовым концом 516 корректирующего элемента 512 во второй осевой точке 521 (как видно на фиг. 40). Вращение корректирующей ручки 514 в направлении вращения R по отношению к полому внешнему стержню 508 и ручки 510 внешнего стержня вызывает перемещение корректирующего элемента 512 в направлении D по отношению к полому внешнему стержню 508 и вызывает разворачивание рычага 504 по пути E по отношению к полому внешнему стержню 508.
Рычаг 504 содержит истирающую поверхность 506 для удаления костного материала. Как видно на фиг. 41, рычаг 504 может представлять собой удлиненный элемент, который имеет полуцилиндрическое сечение, а истирающая поверхность 506 может содержать рашпиль, покрытый несколькими острыми выступами 513. На фиг. 39 представлено экскавационное устройство 502, размещенное внутри первой полости 109, выполненной внутри большой берцовой кости 102. Для того чтобы создавать вторую полость 115 по одну сторону от первой полости 109, оператор держит ручку 510 внешнего стержня одной рукой, а корректирующую ручку 514 другой рукой и начинает двигать систему 500 для экскавации костного материала, совершая перемещение 522 назад и вперед, при этом медленно поворачивая корректирующую ручку 514 в направлении вращения R. По мере удаления костного материала рычаг 504 может расправляться больше и больше вдоль пути E (фиг. 40), поскольку корректирующую ручку 514 поворачивают в направлении вращения R и систему 500 для экскавации костного материала двигают, совершая перемещение 522 назад и вперед. Конечный момент этой стадии представлен на фиг. 40, где вторая полость 115 создана в первой части 119 и второй части 121 большой берцовой кости 102. По завершении этой стадии, корректирующую ручку поворачивают в противоположном направлении вращения относительно направления вращения R, таким образом, позволяя рычагу 504 свернуться, и экскавационное устройство 502 удаляют из большой берцовой кости 102.
На фиг. 42-44 проиллюстрирована третья система 600 для экскавации костного материала. Система 600 для экскавации костного материала содержит экскавационное устройство 602, которое имеет полый внешний стержень 608. Полый внешний стержень 608 имеет дистальный конец 607 и проксимальный конец 609, и его прикрепляют к ручке 610 внешнего стержня, которая выполнена так, чтобы ее можно было держать одной рукой, чтобы стабилизировать или перемещать экскавационное устройство 602. Корректирующий элемент 612, который имеет резьбовой конец 616, прикрепляют к корректирующей ручке 614. Резьбовой конец 616 входит по резьбе в зацепление с внутренней резьбой (не показано) внутри полого внешнего стержня 608, и поворот корректирующего элемента 612 посредством манипуляции корректирующей ручки 614 перемещает корректирующий элемент 612 по оси по отношению к полому внешнему стержню 608. Полый внешний стержень 608 имеет вырезанную секцию 611 смежно с рычагом 604 на шарнире. Резьбовой конец 616 соединен с рычагом 604 через звено 620. Звено 620 соединяется с рычагом 604 в первой осевой точке 618, и звено 620 соединяется с резьбовым концом 616 корректирующего элемента 612 во второй осевой точке 621. Вращение корректирующей ручки 614 в направлении вращения R по отношению к полому внешнему стержню 608 и ручки 610 внешнего стержня заставляет корректирующий элемент 612 перемещаться в направлении D по отношению к полому внешнему стержню 608 и заставляет расправляться рычаг 604 по пути E по отношению к полому внешнему стержню 608, как видно на фиг. 43.
Как видно на фиг. 44, рычаг 604 содержит уплотняющую поверхность 606 для уплотнения губчатой кости. Рычаг 604 может представлять собой удлиненный элемент, который имеет трубчатое или частично трубчатое сечение, и уплотняющая поверхность 606 может содержать ведущий край 690 для прорезания пути через губчатую кость и первую наклонную поверхность 692, которая идет от ведущего края 690. Первая наклонная поверхность 692 служит для того, чтобы уплотнять губчатую кость, но также допускает некоторое скольжение по губчатой кости, когда губчатая кость смещается с пути. Аналогичным образом, вторую наклонную поверхность 694, которая имеет угол, отличный от такового у первой наклонной поверхности 692, можно выполнять в качестве части уплотняющей поверхности 606. На фиг. 42 представлено экскавационное устройство 602, помещенное внутри первой полости 109, выполненной внутри большой берцовой кости 102. Для того чтобы создавать вторую полость 115 по одну сторону от первой полости 109, оператор держит ручку 610 внешнего стержня одной рукой и корректирующую ручку 614 другой рукой и начинает медленно поворачивать корректирующую ручку 614 в направлении вращения R. Губчатую кость уплотнят по мере того, как рычаг 604 расправляется все больше и больше вдоль пути E, посредством поворота корректирующей ручки 614 в направлении вращения R. Конечный момент этой стадии показан на фиг. 43, где вторая полость 115 создана во второй части 121 большой берцовой кости 102. Экскавационное устройство 602 можно перемещать сверху в большую берцовую кость 102 и внутри первой части 119 большой берцовой кости 102 можно выполнять уплотнение. По завершении стадии уплотнения, корректирующую ручку поворачивают в противоположном направлении вращения относительно направления вращения R, таким образом, позволяя рычагу 604 сворачиваться, и экскавационное устройство 602 удаляют из большой берцовой кости 102.
На фиг. 45A-50 проиллюстрировано неинвазивно корректируемое устройство 700 для клиновидной остеотомии. Неинвазивно корректируемое устройство 700 для клиновидной остеотомии имеет первый конец 726 и второй конец 728, как показано на фиг. 45A, и оно схоже по конструкции с неинвазивно корректируемым устройством 300 для клиновидной остеотомии с фиг. 17-19. Однако первый конец 726 неинвазивно корректируемого устройства 700 для клиновидной остеотомии содержит изгиб Герцога 780, у которого первый конец 726 выступает под углом Θ. В некоторых вариантах осуществления угол Θ может находиться в диапазоне между приблизительно 5° и приблизительно 20 или более конкретно между приблизительно от 8° до 12° или приблизительно 10°, по отношению к центральной оси 782 неинвазивно корректируемого устройства 700 для клиновидной остеотомии. Магнитно корректируемый исполнительный механизм 742 содержит внутренний стержень 732, телескопически расположенный внутри внешнего корпуса 730, внешний корпус 730 дополнительно содержит корпус 712 для вытяжения и корпус 706 коробки передач. Первое поперечное отверстие 735, второе поперечное отверстие 743, третье поперечное отверстие 737 и четвертое поперечное отверстие 739 имеют размеры для прохождения костных анкеров, например, стопорных винтов, которые имеют диаметры приблизительно от 3,0 мм приблизительно до 5,5 мм и более конкретно приблизительно от 4,0 мм приблизительно до 5,0 мм. В некоторых вариантах осуществления диаметр внешнего корпуса 730 находится между приблизительно 7,0 мм и приблизительно 9,5 мм, и более конкретно составляет приблизительно 8,5 мм. Диаметр внутреннего стержня 732 также может сужаться приблизительно до 8,5 мм в части внутреннего стержня 732, содержащей второе поперечное отверстие 743 и третье поперечное отверстие 737. Это больше, чем часть 784 малого диаметра внутреннего стержня 732, которая телескопически расположена внутри внешнего корпуса 730, и, таким образом, это увеличение диаметра позволяет в свою очередь конструировать второе поперечное отверстие 743 и третье поперечное отверстие 737 более крупных диаметров, что допускает использование более прочных костных винтов большего диаметра. Аналогичным образом, диаметр первого конца 726 может сужаться приблизительно до 10,7 мм для того, чтобы допускать даже более крупные костные винты, подлежащие использованию. В неинвазивно корректируемом устройстве 700 для клиновидной остеотомии, которое имеет внешний корпус 730 диаметром приблизительно 8,5 мм, сужение приблизительно до 10,7 мм на первом конце 726, и с внутренним стержнем 732, который сужается приблизительно до 8,5 мм, предусмотрено, что костные винты, имеющие диаметр приблизительно 4,0 мм, будут помещать через второе поперечное отверстие 743 и третье поперечное отверстие 737, тогда как костные винты диаметром приблизительно 5,0 мм будут помещать через первое поперечное отверстие 735 и четвертое поперечное отверстие 739. Образцовая длина неинвазивно корректируемого устройства 700 для клиновидной остеотомии от пространства, занимаемого первым концом 726, до второго конца 728 составляет приблизительно 150 мм.
Как видно более подробно на фиг. 46, поверхность 766 контакта на первом конце 726 неинвазивно корректируемого устройства 700 для клиновидной остеотомии содержит внутреннюю резьбу 797 для обратимого зацепления с наружной резьбой вставляющего инструмента. Примеры способов и вариантов осуществления инструментов, которые можно использовать для того, чтобы имплантировать неинвазивно корректируемое устройство 700 для клиновидной остеотомии, или другие варианты осуществления настоящего изобретения, описаны в патенте США № 8449543, раскрытие которого, таким образом, включено посредством ссылки в полном объеме. Четвертое поперечное отверстие 739 содержит динамическую конструкцию, которая делает возможным некоторое перемещение между костным анкером и неинвазивно корректируемым устройством 700 для клиновидной остеотомии, когда неинвазивно корректируемое устройство 700 для клиновидной остеотомии имплантируют и неинвазивно корректируют. Втулка 751, имеющая по существу цилиндрические внешний и внутренний диаметры, остается внутри четвертого поперечного отверстия 739 и имеет внутренний диаметр 753, выполненный для того, чтобы плавно пропускать стержень стопорного винта, например, стопорного винта, который имеет диаметр приблизительно 5,0 мм. В некоторых вариантах осуществления втулку 751 можно конструировать из металлических материалов, таких как Titan-6A1-4V. В других вариантах осуществления втулку 751 можно конструировать из PEEK. Втулка 751 может быть не ограничена по углу и, таким образом, способна качаться или вращаться внутри четвертого поперечного отверстия 739.
На фиг. 47 представлено неинвазивно корректируемое устройство 700 для клиновидной остеотомии в первом невытянутом состоянии. Внутренний стержень 732 по существу отведен внутрь внешнего корпуса 730. На фиг. 48 представлено неинвазивно корректируемое устройство 700 для клиновидной остеотомии в частично вытянутом состоянии, причем часть внутреннего стержня 732 выходит из внешнего корпуса 730 (например, после магнитного вытяжения). Кроме того, на фиг. 47 и 48 представлены два различных возможных положения для костного винта 755, который имеет головку 757, стержень 759 и резьбовую часть 761 для зацепления с кортикальной костью. Костный винт 755 изображен качающимся или поворачивающимся по общему дугообразному пути 763. Втулка 751 в целом может качаться внутри четвертого поперечного отверстия 739 или втулка 751 фактически может поворачиваться по оси. Например, штыри могут идти поперечно от внешнего диаметра втулки 751 приблизительно в центральной точке ее длины, и закрепляться в отверстиях или выемках, сформированных поперечно внутри четвертого поперечного отверстия 739. Слова «качаться» и «качание», как используют в настоящем документе, в целом предназначены для того, чтобы обозначать перемещение, которое не имеет центральной осевой точки. «Неограниченный по углу», как используют в настоящем документе, предназначен для того, чтобы обозначать определенную свободу перемещения втулки 751, которая делает возможной расположение костного винта 755 под углом, не обязательно в одной плоскости, по отношению к неинвазивно корректируемому устройству 700 для клиновидной остеотомии. «Неограниченный по углу», как используют в настоящем документе, предназначен для того, чтобы включать как качание, так и поворот.
На фиг. 49 и 50 проиллюстрирован вид в разрезе втулки 751, двигающейся ограниченным по углу образом внутри четвертого поперечного отверстия 739. Как видно на фиг. 51, втулка 751 содержит два участка 765, 770 большого диаметра и два участка 767, 768 малого диаметра, разделенные переходной областью 769. В некоторых вариантах осуществления продольная щель 771 вдоль одной стороны втулки 751 может присутствовать для того, чтобы позволять костным винтам 755, которые имеют определенное количество колебаний внешнего диаметра, входить во внутренний диаметр 753. На фиг. 49 втулка 751 не достигала своих пределов в четвертом поперечном отверстии 739. В отличие от этого, на фиг. 50 показан один участок 765 большого диаметра, который упирается в первую точку 773 внутри четвертого поперечного отверстия 739, и другой участок 770 большого диаметра, который упирается во вторую точку 775 внутри четвертого поперечного отверстия 739. Кроме того, эта продольная щель 771 или, альтернативно, внешние контуры на втулке 751 могут подходить в пределах совпадающих контуров к четвертому поперечному отверстию 739 с тем, чтобы втулка 751 не могла вращаться вокруг своей цилиндрической оси (по отношению к четвертому поперечному отверстию 739), но все еще могла качаться или поворачиваться. Размерами двух участков 765, 770 с большим диаметром и двух участков 767, 768 малого диаметра можно управлять, например, с тем, чтобы втулка 751 была способна качаться или поворачиваться приблизительно на 15° в одном направлении, но приблизительно на 0° в другом направлении. Эти приблизительно 15°, например, можно выбирать так, чтобы они соответствовали общему количеству открытия открытой клиновидной остеотомии 118 у конкретного пациента. Диапазоном этих угловых положений можно управлять в различных моделях втулки 751. Например, приблизительно 15° в одном направлении, приблизительно 0° в другом направлении; приблизительно 10° в одном направлении, приблизительно 5° в другом направлении; приблизительно 20° в одном направлении, приблизительно 0° в другом направлении; и приблизительно 10° в одном направлении, приблизительно 10° в другом направлении.
На фиг. 52-55 проиллюстрирован способ имплантирования и приведения в действие неинвазивно корректируемого устройства 700 для клиновидной остеотомии с фиг. 45A-51 для поддержания или корректировки угла при открытой клиновидной остеотомии большой берцовой кости пациента. На фиг. 52 выполняют первую полость 109, идущую от первой точки на большой берцовой кости 102 на плато 101 большой берцовой кости. В некоторых вариантах осуществления первую полость 109 можно выполнять, как показано на фиг. 20-22. На фиг. 53 неинвазивно корректируемое устройство 700 для клиновидной остеотомии вставляют в первую полость 109, сначала внутренний стержень 732, за чем следует внешний корпус 730. На фиг. 54 неинвазивно корректируемое устройство 700 для клиновидной остеотомии прикрепляют к первой части 119 большой берцовой кости 102 первым костным винтом 755, который проходит через четвертое поперечное отверстие 739 с фиг. 45B, и вторым костным винтом 777, который проходит через первое поперечное отверстие 735 с фиг. 45B. В этом варианте осуществления только четвертое поперечное отверстие 739 имеет втулку 751, встроенную в него. Третий костный винт 779 и четвертый костный винт 781 пропускают через второе поперечное отверстие 743 на фиг. 45B и третье поперечное отверстие 737 на фиг. 45B, соответственно, и закрепляют во второй части 121 большой берцовой кости 102. Неинвазивно корректируемое устройство 700 для клиновидной остеотомии закрепляют внутри большой берцовой кости 102 с тем, чтобы изгиб Герцога 780, с фиг. 45A, указывал вперед (например в направлении надколенного сухожилия). На фиг. 55 проиллюстрировано неинвазивно корректируемое устройство 700 для клиновидной остеотомии после вытяжения в течение одного или нескольких неинвазивных вытяжений, в течение периода в одни или несколько суток. Угол открытой клиновидной остеотомии 118 увеличен, поскольку внутренний стержень 732 смещен наружу из внешнего корпуса 730. Костный винт 755 способен менять свой угол по отношению к неинвазивно корректируемому устройству 700 для клиновидной остеотомии, например, посредством качания или поворачивания втулки 751 с фиг. 49 внутри четвертого поперечного отверстия 739.
На фиг. 56A-56D проиллюстрированы четыре возможные конфигурации костных винтов для прикрепления первого конца 726 неинвазивно корректируемого устройства 700 для клиновидной остеотомии к первой части 119 большой берцовой кости 102 первым костным винтом 755 и вторым костным винтом 777. Обозначены медиальная 800, латеральная 802, передняя 804 и задняя 806 части большой берцовой кости 102. Ориентации от медиальной 800 до латеральной 802 на фигурах 56A-56D идут слева направо, соответственно, на каждой фиг., тогда как на фиг. 52-55, медиальная находится справа, а латеральная находится слева. В конфигурации с фиг. 56A первый костный винт 755 прикрепляют уникортикально (через кортекс большой берцовой кости 102 только на одной стороне) и под углом B≈10° с медиально-латеральной осью 810. Второй костный винт 777 прикрепляют бикортикально (через кортекс большой берцовой кости 102 на обеих сторонах) и под углом A≈20° с передне-задней осью 808. В конфигурации с фиг. 56B первый костный винт 755 прикрепляют уникортикально и под углом B≈10° (в противоположном направлении, чем на фиг. 56A) с медиально-латеральной осью 810. Второй костный винт 777 прикрепляют бикортикально и под углом A≈20° с передней-задней осью 808. В конфигурации с фиг. 56C как первый костный винт 755, так и второй костный винт 777 прикрепляют бикортикально. Первый костный винт 755 прикрепляют под углом D≈45° с передне-задней осью 808, а второй костный винт 777 прикрепляют под углом A≈20° с передне-задней осью 808. В конфигурации с фиг. 56D как первый костный винт 755, так и второй костный винт 777 прикрепляют бикортикально. Первый костный винт 755 прикрепляют под углом D≈45° с передне-задней осью 808, а второй костный винт 777 прикрепляют под углом E≈45° с передне-задней осью 808.
Несмотря на то, что не показано на фиг. 56A-56D, третий костный винт 779 и четвертый костный винт 781 можно закреплять во множестве ориентаций. Несмотря на то, что на фиг. 54 и 55 показаны ориентированными под небольшим углом от передне-задней плоскости, их также можно помещать в других ориентациях, например, под углом приблизительно 35° от медиально-латеральной плоскости.
На фиг. 57 проиллюстрировано неинвазивно корректируемое устройство 900 для клиновидной остеотомии. Неинвазивно корректируемое устройство 900 для клиновидной остеотомии содержит магнитно корректируемый исполнительный механизм 942, который имеет первый конец 926 и второй конец 928, и оно похоже по конструкции на неинвазивно корректируемое устройство 300 для клиновидной остеотомии с фиг. 17-19. Второй конец 928 содержит внутренний стержень 932, который имеет часть 984 малого диаметра, которая телескопически расположена и может вытягиваться по оси внутри внешнего корпуса 930. Внешний корпус 930 содержит корпус для вытяжения 912 и корпус 906 коробки передач. Первая пластина 950 идет от внешнего корпуса 930 и выполнена с возможностью размещения вблизи от внешней поверхности кости, например, второй части 121 большой берцовой кости 102, представленной на фиг. 59. На первой пластине 950 расположено одно или несколько анкерных отверстий 952, которые выполнены для сопряжения с соответствующими костными винтами. Костный винт 954 представлен на фиг. 58 и содержит резьбовую зауженную головку 956 и резьбовой стержень 958. Ребристую полость 960 соединяют с ключом (не показан). Первая пластина 950 характеризуется стороной 962, сопрягаемой с костью, и стороной 964, не сопрягаемой с костью. Вторая пластина 966, имеющая сторону 968, сопрягаемую с костью, и сторону 970, не сопрягаемую с костью, идет от внутреннего стержня 932. Вторая пластина 966 соединена с внутренним стержнем 932 посредством колпачка 972 и закреплена с использованием установочного винта 974. Одно или несколько анкерных отверстий 976 располагают на второй пластине 966, и они выполнены для сопряжения с соответствующими костными винтами, например, с костным винтом 954. Анкерное отверстие 978 показано имеющим резьбовое сужение 980 для сопряжения с зауженной головкой 956 костного винта 954.
На фиг. 59-61 проиллюстрирован способ имплантирования и приведения в действие неинвазивно корректируемого устройства для клиновидной остеотомии с фиг. 57 для поддержания или корректировки угла при открытой клиновидной остеотомии большой берцовой кости пациента. На фиг. 59 открытая клиновидная остеотомия 118 выполнена в большой берцовой кости 102. На фиг. 60 неинвазивно корректируемое устройство 900 для клиновидной остеотомии помещают через разрез и прикрепляют к большой берцовой кости 102 посредством соединения первой пластины 950 со второй частью 121 большой берцовой кости 102 и соединения второй пластины 966 с первой частью 119 большой берцовой кости, например, с использованием костных винтов 954. На фиг. 61 проиллюстрирована большая берцовая кость 102 после неинвазивного вытяжения неинвазивно корректируемого устройства 900 для клиновидной остеотомии, например, с использованием внешнего корректирующего устройства 1180.
На фиг. 62 и 63 проиллюстрировано неинвазивно корректируемое устройство 1000 для клиновидной остеотомии. Неинвазивно корректируемое устройство 1000 для клиновидной остеотомии содержит магнитно корректируемый исполнительный механизм 1042, который имеет первый конец 1026 и второй конец 1028, и оно схоже по конструкции с неинвазивно корректируемым устройством 300 для клиновидной остеотомии с фиг. 17-19, и неинвазивно корректируемым устройством 900 для клиновидной остеотомии с фиг. 57. Магнитно корректируемый исполнительный механизм 1042 содержит внешний корпус 1030 и внутренний стержень 1032, телескопически расположенный внутри внешнего корпуса 1030. Подобно неинвазивно корректируемому устройству 900 для клиновидной остеотомии с фиг. 57, неинвазивно корректируемое устройство 1000 для клиновидной остеотомии имеет первую пластину 1050, выходящую из внешнего корпуса 1030. Вторую пластину 1066 прикрепляют к внутреннему стержню 1032 посредством колпачка 1072. Вторую пластину 1066 поворотно соединяют с колпачком 1072 в осевой точке 1091, таким образом, позволяя второй пластине 1066 поворачиваться из положения на фиг. 62 в положение на фиг. 63 вдоль стрелки 1081, например, когда внутренний стержень 1032 вытягивают из положения на фиг. 62 в положение на фиг. 63. Это позволяет первой части 119 большой берцовой кости 102 двигаться независимо от второй части 121 большой берцовой кости 102 и, таким образом, раскрывать открытую клиновидную остеотомию 118, но без создания слишком большого изгибающего момента (и связанного увеличения силы трения) при движении внутреннего стержня 1032 внутри внешнего корпуса 1030. Таким образом, крутящий момент, прикладываемый посредством магнитного сопряжения внешнего корректирующего устройства 1180 с фиг. 15, будет достаточным для того, чтобы вытягивать магнитно корректируемый исполнительный механизм 1042. Способность второй пластины 1066 поворачиваться относительно остального неинвазивно корректируемого устройства 900 для клиновидной остеотомии аналогична перемещению, неограниченному по углу, для втулки 751 и костного винта 755 по отношению к неинвазивно корректируемому устройству 700 для клиновидной остеотомии с фиг. 45A через 50.
Использование неинвазивно корректируемого устройства 900 для клиновидной остеотомии или неинвазивно корректируемого устройства 1000 для клиновидной остеотомии, которое не требует никакого удаления кости на плато 101 большой берцовой кости, может быть предпочтительным для определенных пациентов, для которых желательно сохранять коленный сустав 104 в положении, настолько близком к правильному, насколько возможно. Они могут включать молодых пациентов, пациентов, которые смогут избежать в будущем частичной или полной замены колена, или пациентов с деформациями в коленном суставе 104. Они также могут включать маленьких пациентов, которые имеют маленькие размеры костномозгового канала, которым костномозговые устройства подходят не достаточно хорошо.
На фиг. 64A-64C проиллюстрирован магнитно корректируемый исполнительный механизм 1504, который можно использовать с любым из вариантов осуществления настоящего изобретения и который предусматривает временное или постоянное удаление поворотной магнитной компоновки 1542. Субъектам, подвергающимся магнитно-резонансной визуализации (MRI), может требоваться удалить радиально-полюсной постоянный магнит 1502 перед MRI во избежание артефактов визуализации, которые могут быть обусловлены радиально-полюсным постоянным магнитом 1502. Дополнительно, существует риск того, что имплантированный радиально-полюсной постоянный магнит 1502 может размагнититься при попадании в MRI сканер. В некоторых вариантах осуществления крышка 1588 корпуса исполнительного механизма имеет наружную резьбу 1599, которая входит в зацепление с внутренней резьбой 1597 внешнего корпуса 1505 магнитно корректируемого исполнительного механизма 1504. В других вариантах осуществления можно использовать поверхность контакта для посадки/снятия. Часть 1595 со стабильным диаметром крышки 1588 корпуса исполнительного механизма герметизируют внутри уплотнительного кольца 1593, которое удерживается внутри периферической канавки во внешнем корпусе 1505. Если в момент времени после имплантации магнитно корректируемого исполнительного механизма 1504 желательно удалить поворотную магнитную компоновку 1542, при этом оставляя остальной имплантат нетронутым, можно создавать небольшой разрез в коже субъекта вблизи от крышки 1588 корпуса исполнительного механизма, и можно отвинчивать крышку 1588 корпуса исполнительного механизма. Поворотная магнитная компоновка 1542 после этого может быть удалена, как показано на фиг. 64A. На фиг. 64B и 64C представлены следующие стадии возвращения крышки 1588 корпуса исполнительного механизма на магнитно корректируемом исполнительном механизме 1504, снова герметизируя ее с использованием уплотнительного кольца 1593. Затем разрез можно закрывать, и субъект может проходить типичное MRI сканирование. При желании, после MRI сканирования, магнитную компоновку 1542 можно возвратить, придерживаясь обратного способа.
На фиг. 65A-65D проиллюстрирован магнитно корректируемый исполнительный механизм 1604, который можно использовать с любым из вариантов осуществления настоящего изобретения и который предпочтительно предусматривает временное или постоянное удаление радиально-полюсного постоянного магнита 1602. Крышка 1688 корпуса исполнительного механизма прикрепляется к и открепляется от магнитно корректируемого исполнительного механизма 1604 аналогичным образом, как в магнитно корректируемом исполнительном механизме 1504 с фиг. 64A-64C. Радиально-полюсной постоянный магнит 1602 имеет две радиальных части 1687 и две плоские части 1685. Две плоские части 1685 входят в плоские стенки 1683 магнитного корпуса 1640, что делает возможным вращение радиально-полюсного постоянного магнита 1602 для того, чтобы непосредственно передавать крутящий момент на магнитный корпус 1640 без необходимости в каком-либо адгезиве или эпоксидном составе. Крышку 1681 магнитного корпуса, которая имеет уплотнительное кольцо 1679, можно прикреплять к и удалять с магнитного корпуса 1640. Если MRI субъекта является желаемой и установлено, что радиально-полюстной постоянный магнит 1602 нужно удалить, в коже субъекта выполняют небольшой разрез вблизи от крышки 1688 корпуса исполнительного механизма и удаляют крышку 1688 корпуса исполнительного механизма. Затем крышку 1681 магнитного корпуса удаляют с магнитного корпуса 1640. Тяговая штанга 1677 проходит через продольное отверстие (не показано) в радиально-полюсном постоянном магните 1602 так, что за один конец ее можно схватить, например, щипцами или зажимом. Тяговая штанга 1677 может иметь плоское основание 1675 на противоположном конце с тем, чтобы, когда ее вытягивают, она могла тащить радиально-полюсной постоянный магнит 1602 с собой. Радиально-полюсной постоянный магнит 1602 можно удалять навсегда или временно (фиг. 65B) (см. путь 1691 удаления) и возвращать крышку 1681 магнитного корпуса (фиг. 65C). Затем можно возвращать крышку 1688 корпуса исполнительного механизма (фиг. 65D). После этого закрывают разрез, и субъект может проходить типичное MRI сканирование. При желании, после MRI сканирования, радиально-полюсной постоянный магнит 1602 можно вернуть, придерживаясь обратного способа. Альтернативно, крышку 1681 магнитного корпуса или крышку 1688 корпуса исполнительного механизма можно заменить на крышку альтернативной геометрической формы, которая будет вести к заклиненной структуре внутри магнитного исполнительного механизма 1604, таким образом, предотвращая вращение внутренних механизмов и предотвращая изменение конкретного количества корректировки субъекта, когда субъект ходит, бегает или выполняет растяжку.
На всем протяжении представленных вариантов осуществления с радиально-полюсным постоянным магнитом (например, 168 с фиг. 8), в качестве части магнитной компоновки (например, 166), используют ведущий элемент для того, чтобы удаленно вызывать движение в неинвазивно корректируемом устройстве для клиновидной остеотомии. На фиг. 66-69 схематически представлены четыре альтернативных варианта осуществления, где вместо постоянных магнитов используют перенос энергии других типов.
На фиг. 66 проиллюстрировано неинвазивно корректируемое устройство 1300 для клиновидной остеотомии, которое содержит имплантат 1306, который имеет первую часть 1302 имплантата и вторую часть 1304 имплантата, вторую часть 1304 имплантата можно неинвазивно смещать относительно первой части 1302 имплантата. Первую часть 1302 имплантата прикрепляют к первой части 197 кости и вторую часть 1304 имплантата прикрепляют ко второй части 199 кости внутри пациента 191. Двигатель 1308 можно приводить в действие для того, чтобы вызывать смещение первой части 1302 имплантата и второй части 1304 имплантата относительно друг друга. Внешнее корректирующее устройство 1310 имеет панель 1312 управления для ввода оператора, дисплей 1314 и передатчик 1316. Передатчик 1316 посылает управляющий сигнал 1318 через кожу 195 пациента 191 на имплантированный приемник 1320. Имплантированный приемник 1320 осуществляет связь с двигателем 1308 через проводник 1322. Двигатель 1308 можно питать с помощью имплантируемой батареи или можно питать или заряжать с помощью индуктивной связи.
На фиг. 67 проиллюстрировано неинвазивно корректируемое устройство 1400 для клиновидной остеотомии, которое содержит имплантат 1406, который имеет первую часть 1402 имплантата и вторую часть 1404 имплантата, вторую часть 1404 имплантата можно неинвазивно смещать относительно первой части 1402 имплантата. Первую часть 1402 имплантата прикрепляют к первой части 197 кости и вторую часть 1404 имплантата прикрепляют ко второй части 199 кости внутри пациента 191. Ультразвуковой двигатель 1408 можно приводить в действие для того, чтобы вызывать смещение первой части 1402 имплантата и второй части 1404 имплантата относительно друг друга. Внешнее корректирующее устройство 1410 имеет панель 1412 управления для ввода оператором, дисплей 1414 и ультразвуковой преобразователь 1416, который соединен с кожей 195 пациента 191. Ультразвуковой преобразователь 1416 создает ультразвуковые волны 1418, которые проходят через кожу 195 пациента 191 и приводят в действие ультразвуковой двигатель 1408.
На фиг. 68 проиллюстрировано неинвазивно корректируемое устройство 1700 для клиновидной остеотомии, которое содержит имплантат 1706, который имеет первую часть 1702 имплантата и вторую часть 1704 имплантата, вторую часть 1704 имплантата можно неинвазивно смещать относительно первой части 1702 имплантата. Первую часть 1702 имплантата прикрепляют к первой части 197 кости и вторую часть 1704 имплантата прикрепляют ко второй части 199 кости внутри пациента 191. Исполнительный механизм 1708 с памятью формы можно приводить в действие для того, чтобы вызывать смещение первой части 1702 имплантата и второй части 1704 имплантата относительно друг друга. Внешнее корректирующее устройство 1710 имеет панель управления 1712 для ввода оператором, дисплей 1714 и передатчик 1716. Передатчик 1716 посылает управляющий сигнал 1718 через кожу 195 пациента 191 на имплантированный приемник 1720. Имплантированный приемник 1720 осуществляет связь с исполнительным механизмом 1708 с памятью формы через проводник 1722. Исполнительный механизм 1708 с памятью формы можно питать от имплантируемой батареи или можно питать или заряжать посредством индуктивной связи.
На фиг. 69 проиллюстрировано неинвазивно корректируемое устройство 1800 для клиновидной остеотомии, которое содержит имплантат 1806, который имеет первую часть 1802 имплантата и вторую часть 1804 имплантата, вторую часть 1804 имплантата можно неинвазивно смещать относительно первой части 1802 имплантата. Первую часть 1802 имплантата прикрепляют к первой части 197 кости, а вторую часть 1804 имплантата прикрепляют ко второй части 199 кости внутри пациента 191. Гидравлический насос 1808 можно приводить в действие для того, чтобы вызывать смещение первой части 1802 имплантата и второй части 1804 имплантата относительно друг друга. Внешнее корректирующее устройство 1810 имеет панель управления 1812 для ввода оператором, дисплей 1814 и передатчик 1816. Передатчик 1816 посылает управляющий сигнал 1818 через кожу 195 пациента 191 на имплантированный приемник 1820. Имплантированный приемник 1820 осуществляет связь с гидравлическим насосом 1808 через проводник 1822. Гидравлический насос 1808 можно питать от имплантируемой батареи или можно питать или заряжать посредством индуктивной связи. Гидравлический насос 1808 альтернативно можно заменять на пневматический насос.
В одном из вариантов осуществления система для изменения угла кости субъекта содержит корректируемый исполнительный механизм, который имеет внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе; магнитную компоновку, выполненную с возможностью корректировать длину корректируемого исполнительного механизма через осевое движение внутреннего стержня и внешнего корпуса по отношению друг к другу; первую крепежную скобу, выполненную для соединения с внешним корпусом; вторую крепежную скобу, выполненную для соединения с внутренним стержнем; и где приложение перемещающего магнитного поля снаружи к субъекту перемещает магнитную компоновку так, что внутренний стержень и внешний корпус перемещаются по отношению друг к другу.
В другом варианте осуществления система для изменения угла кости субъекта содержит магнитную компоновку, которая содержит радиально-полюсной магнит, связанный со стержнем, который имеет внешнюю резьбу; блок, который имеет внутреннюю резьбу и связан со стержнем, где вращательное движение радиально-полюсного магнита может вызывать поворот и перемещение стержня по оси по отношению к блоку; верхнюю поверхность контакта с костью и нижнюю поверхность контакта с костью, которые имеют корректируемое расстояние; и где осевое движение стержня в первом направлении вызывает увеличение расстояния. Верхнюю и нижнюю поверхности контакта с костью можно формировать в качестве части пластинчатой пружины. Верхнюю и нижнюю поверхности контакта с костью можно формировать в качестве части множества взаимосвязанных пластин.
В другом варианте осуществления система для изменения угла кости субъекта содержит ножничную компоновку, которая содержит первое и второе плечо ножниц, поворотное соединенные через петлю, первое и второе плечо ножниц связаны, соответственно, с верхней и нижней поверхностями контакта с костью, выполненными с возможностью перемещаться относительно друг друга; полую магнитную компоновку, которая содержит перемещаемый по оси ведущий винт, расположенный в ней, где полая магнитная компоновка выполнена с возможностью вращения в ответ на перемещающее магнитное поле и где указанное вращение переходит в осевое движение ведущего винта; компоновку храповика, связанную одним концом с ведущим винтом и другим концом с одним из первого и второго плеча ножниц, компоновка храповика содержит собачку, выполненную с возможностью зацепления с зубцами, расположенными на одной из верхней и нижней поверхностей контакта с костью; и где осевое движение ведущего винта продвигает собачку вдоль зубцов и двигает верхнюю и нижнюю поверхности контакта с костью друг от друга.
В другом варианте осуществления способ подготовки большой берцовой кости к имплантации смещающего имплантата включает выполнение первого разреза в коже пациента в местоположении, смежном с плато большой берцовой кости на большой берцовой кости пациента; создание первой полости в большой берцовой кости посредством удаления костного материала вдоль первой оси, идущей по существу в продольном направлении от первой точки на плато большой берцовой кости ко второй точке; размещение экскавационного устройства внутри первой полости, экскавационное устройство содержит основное удлиненное тело и выполнено с возможностью извлекать большую берцовую кость асимметрично по отношению к первой оси; создание второй полости в большой берцовой кости с использованием экскавационного устройства, где вторая полость сообщается с первой полостью и идет по существу в направлении одной стороны большой берцовой кости; и удаление экскавационного устройства. Вторая полость может идти у пациента по существу латерально. Вторая полость может идти у пациента по существу медиально. Способ дополнительно может включать уплотнение части губчатой кости большой берцовой кости на стадии создания второй полости. Экскавационное устройство может содержать шарнирный рычаг, который имеет первый конец и второй конец, рычаг содержит уплотняющую поверхность. Уплотняющая поверхность может содержать ведущий край и по меньшей мере одну наклонную поверхность. Рычаг можно корректировать по отношению к основному удлиненному телу. Первый конец рычага может быть поворотно связан с основным удлиненным телом и второй конец рычага можно корректировать для множества расстояний до основного удлиненного тела. Экскавационное устройство может быть связано с корректирующим элементом, выполненным с возможностью перемещать второй конец рычага на по меньшей мере одно из множества расстояний от основного удлиненного тела. Стадия создания второй полости дополнительно может включать корректировку корректирующего элемента для того, чтобы перемещать второй конец на по меньшей мере некоторые из множества расстояний до основного удлиненного тела так, что уплотняющая поверхность уплотняет губчатую кость в направлении кортикальной кости. Стадия создания второй полости может включать удаление костного материала из большой берцовой кости. Экскавационное устройство может содержать шарнирный рычаг, который имеет первый конец и второй конец, рычаг содержит истирающую поверхность. Истирающая поверхность может содержать рашпиль. Рычаг может быть корректируемым по отношению к основному удлиненному телу. Первый конец рычага можно поворотно соединять с основным удлиненным телом, а второй конец рычага можно корректировать для множества расстояний до основного удлиненного тела. Экскавационное устройство можно соединять с корректирующим элементом, выполненным с возможностью перемещать второй конец рычага по меньшей мере на одно из множества расстояний от основного удлиненного тела. Стадия создания второй полости дополнительно может включать перемещение экскавационного устройства продольно вдоль двунаправленного пути, приблизительно соответствующего первой оси, и корректировку корректирующего элемента для того, чтобы перемещать второй конец рычага по меньшей мере на одно из множества расстояний до основного удлиненного тела так, что истирающая поверхность удаляет костный материал. Основное удлиненное тело может содержать вращающийся режущий инструмент, который имеет первый конец, второй конец, режущую область, которая идет по меньшей мере частично между первым концом и вторым концом, и кольцевой зацепляющий элемент, и экскавационное устройство дополнительно может содержать гибкую цепь привода, выполненную с возможность зацепления с кольцевым зацепляющим элементом. Стадия размещения экскавационного устройства дополнительно может включать создание пути через кортикальную кость по меньшей мере на одной стороне большой берцовой кости, вставление гибкой цепи привода через путь и соединение гибкой цепи привода с вращающимся режущим инструментом с тем, чтобы движение гибкой цепи привода вызывало вращение вращающегося режущего инструмента. Стадия создания второй полости дополнительно может включать движение кольцевого зацепляющего элемента вращающегося режущего инструмента по существу в направлении одной стороны большой берцовой кости, пока вращающийся режущий инструмент вращают посредством гибкой цепи привода. Гибкую цепь привода можно перемещать посредством блока привода. Вращающийся режущий инструмент можно использовать для того, чтобы создавать первую полость. Вращающийся режущий инструмент может содержать расширитель. Первый конец вращающегося режущего инструмента может содержать тупой кончик. Второй конец вращающегося режущего инструмента может быть соединен с отводящим тросом, идущим из первого разреза. Отводящий трос может быть связан с вращающимся режущим инструментом посредством шарнирного соединения. Стадия удаления может содержать удаление вращающегося режущего инструмента посредством приложения натяжения к отводящему тросу из местоположения, внешнего по отношению к пациенту. Способ дополнительно может включать стадию создания остеотомии между первой частью и второй частью большой берцовой кости, где гибкая цепь привода идет через остеотомию.
В другом варианте осуществления способ имплантирования неинвазивно корректируемой системы для изменения угла большой берцовой кости пациента включает создание остеотомии между первой частью и второй частью большой берцовой кости; выполнение первого разреза в коже пациента в местоположении, смежном с плато большой берцовой кости на большой берцовой кости пациента; создание первой полости в большой берцовой кости вдоль первой оси, идущей по существу в продольном направлении от первой точки на плато большой берцовой кости ко второй точке; размещение экскавационного устройства внутри первой полости, экскавационное устройство выполнено с возможностью извлекать большую берцовую кость асимметрично по отношению к первой оси; создание второй полости в большой берцовой кости с использованием экскавационного устройства, где вторая полость идет по существу в направлении одной стороны большой берцовой кости; размещение неинвазивно корректируемого имплантата через первую полость и по меньшей мере частично во второй полости, неинвазивно корректируемый имплантат содержит корректируемый исполнительный механизм, который имеет внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе; соединение внешнего корпуса с первой частью большой берцовой кости; и соединение внутреннего стержня со второй частью большой берцовой кости. Первая часть может быть выше остеотомии, а вторая часть может быть ниже остеотомии. Первая часть может быть ниже остеотомии, а вторая часть может быть выше остеотомии. Вторая полость может сообщаться с первой полостью. Способ дополнительно может содержать стадию неинвазивного управления внутренним стержнем для того, чтобы перемещать по отношению к внешнему корпусу. Неинвазивно корректируемый имплантат может содержать ведущий элемент, выполненный с возможностью перемещать внутренний стержень по отношению к внешнему корпусу. Ведущий элемент можно выбирать из группы, содержащей: постоянный магнит, двигатель с индуктивной связью, двигатель, приводимый в действие ультразвуком, подкожный гидравлический насос, подкожный пневматический насос и исполнительный механизм, приводимый в движение за счет памяти формы.
В другом варианте осуществления способ подготовки кости к имплантации имплантата включает выполнение первого разреза в коже пациента; создание первой полости в кости посредством удаления костного материала вдоль первой оси, идущей по существу в продольном направлении от первой точки на ко второй точке; размещение экскавационного устройства внутри первой полости, экскавационное устройство содержит основное удлиненное тело и выполнено с возможностью извлекать кость асимметрично по отношению к первой оси, экскавационное устройство дополнительно содержит шарнирный рычаг, который имеет первый конец и второй конец, рычаг содержит уплотняющую поверхность; создание второй полости в кости с использованием экскавационного устройства, где вторая полость сообщается с первой полостью и идет по существу в направлении одной стороны кости; и удаление экскавационного устройства.
В другом варианте осуществления способ подготовки кости к имплантации имплантата включает выполнение первого разреза в коже пациента; создание первой полости в кости посредством удаления костного материала вдоль первой оси, идущей по существу в продольном направлении от первой точки ко второй точке; размещение экскавационного устройства внутри первой полости, экскавационное устройство содержит основное удлиненное тело и выполнено с возможностью извлекать кость асимметрично по отношению к первой оси, экскавационное устройство дополнительно содержит шарнирный рычаг, который имеет первый конец и второй конец, рычаг содержит истирающую поверхность; создание второй полости в кости с использованием экскавационного устройства, где вторая полость сообщается с первой полостью и идет по существу в направлении одной стороны кости; и удаление экскавационного устройства.
В другом варианте осуществления способ подготовки кости к имплантации имплантата включает выполнение первого разреза в коже пациента; создание первой полости в кости посредством удаления костного материала вдоль первой оси, идущей по существу в продольном направлении от первой точки ко второй точке; размещение экскавационного устройства внутри первой полости, экскавационное устройство содержит основное удлиненное тело и выполнено с возможностью извлекать кость асимметрично по отношению к первой оси, экскавационное устройство дополнительно содержит вращающийся режущий инструмент, выполненный для перемещения по существу в направлении одной стороны кости, пока вращающийся режущий инструмент вращают; создание второй полости в кости с использованием экскавационного устройства, где вторая полость сообщается с первой полостью и идет по существу в направлении одной стороны кости; и удаление экскавационного устройства.
В другом варианте осуществления система для изменения угла кости субъекта содержит неинвазивно корректируемый имплантат, который содержит корректируемый исполнительный механизм, который имеет внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе, внешний корпус выполнен с возможностью соединения с первой частью кости, а внутренний стержень выполнен с возможностью соединения со второй частью кости; ведущий элемент, выполненный с возможностью перемещать внутренний стержень по отношению к внешнему корпусу; и экскавационное устройство, которое содержит основное удлиненное тело, выполненное с возможностью вставляться внутрь первой полости кости вдоль первой оси, экскавационное устройство выполнено с возможностью извлекать кость асимметрично по отношению к первой оси для того, чтобы создавать вторую полость, сообщающуюся с первой полостью, где корректируемый исполнительный механизм выполнен с возможностью соединения с костью по меньшей мере частично внутри второй полости. Ведущий элемент можно выбирать из группы, которая содержит: постоянный магнит, двигатель с индуктивной связью, двигатель, приводимый в действие ультразвуком, подкожный гидравлический насос, подкожный пневматический насос и исполнительный механизм, приводимый в движение за счет памяти формы. Экскавационное устройство можно выполнять с возможностью уплотнять губчатую кость. Экскавационное устройство может содержать шарнирный рычаг, который имеет первый конец и второй конец, рычаг содержит истирающую поверхность. Истирающая поверхность может содержать рашпиль. Экскавационное устройство может содержать вращающийся режущий инструмент, который имеет первый конец, второй конец, режущую область, которая идет по меньшей мере частично между первым концом и вторым концом, и кольцевой зацепляющий элемент, и экскавационное устройство дополнительно может содержать гибкую цепь привода, выполненную с возможность зацепления с кольцевым зацепляющим элементом.
В другом варианте осуществления система для изменения угла кости субъекта содержит неинвазивно корректируемый имплантат, который содержит корректируемый исполнительный механизм, который имеет внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе, внешний корпус выполнен с возможностью соединения с первой частью кости, а внутренний стержень выполнен с возможностью соединения со второй частью кости; и ведущий элемент, выполненный с возможностью перемещать внутренний стержень по отношению к внешнему корпусу, где ведущий элемент выбирают из группы, которая включает: постоянный магнит, двигатель с индуктивной связью, двигатель, приводимый в действие ультразвуком, подкожный гидравлический насос, подкожный пневматический насос и исполнительный механизм, приводимый в движение за счет памяти формы. Ведущий элемент может содержать постоянный магнит.
В другом варианте осуществления система для изменения угла большой берцовой кости субъекта, имеющего остеоартрит колена, содержит неинвазивно корректируемый имплантат, который содержит корректируемый исполнительный механизм, который имеет внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе, внешний корпус имеет первое поперечное отверстие, и внутренний стержень имеет второе поперечное отверстие; ведущий элемент, выполненный с возможностью перемещать внутренний стержень по отношению к внешнему корпусу, где ведущий элемент выбирают из группы, которая включает: постоянный магнит, двигатель с индуктивной связью, двигатель, приводимый в действие ультразвуком, подкожный гидравлический насос, подкожный пневматический насос и исполнительный механизм, приводимый в движение за счет памяти формы; первый анкер, выполненный с возможностью размещения через первое поперечное отверстие и соединения с первой частью большой берцовой кости; и второй анкер, выполненный с возможностью размещения через второе поперечное отверстие и соединения со второй частью большой берцовой кости, где по меньшей мере один из первого анкера и второго анкера выполнен с возможностью поворота по отношению к неинвазивно корректируемому имплантату, когда соединен или с первой частью или со второй частью большой берцовой кости. Ведущий элемент может содержать постоянный магнит.
В другом варианте осуществления способ изменения угла кости включает создание остеотомии между первой частью и второй частью большой берцовой кости пациента; создание полости в большой берцовой кости посредством удаления костного материала вдоль оси, идущей по существу в продольном направлении от первой точки на плато большой берцовой кости ко второй точке; размещение неинвазивно корректируемого имплантата в полости, неинвазивно корректируемый имплантат содержит корректируемый исполнительный механизм, который имеет внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе, и ведущий элемент, выполненный с возможностью удаленного приведения в действие для того, чтобы телескопически смещать внутренний стержень по отношению к внешнему корпусу; соединение одного из внешнего корпуса или внутреннего стержня с первой частью большой берцовой кости; соединение другого из внешнего корпуса или внутреннего стержня со второй частью большой берцовой кости; и удаленное приведение в действие ведущего элемента для того, чтобы телескопически смещать внутренний стержень по отношению к внешнему корпусу, таким образом, изменяя угол между первой частью и второй частью большой берцовой кости.
Несмотря на то, что представлены и описаны только некоторые варианты осуществления настоящего изобретения, можно создавать различные модификации, не выходя за рамки настоящего изобретения. Любые варианты осуществления неинвазивно корректируемого устройства для клиновидной остеотомии можно использовать для постепенного вытяжения (остеогенез Илизарова) или для резкой коррекции неправильного угла. Сам имплантат можно использовать в качестве любого одного из элементов экскавационного устройства, например, внешняя часть имплантата может иметь признаки, которые позволяют использовать его в качестве расширителя, рашпиля или уплотнителя кости. В качестве альтернативы, удаленную корректировку, описанную выше, можно заменить на ручной контроль любой имплантированной части, например, ручное нажатие пациентом или лицом, осуществляющим уход, на кнопку, размещенную под кожей. Следовательно, изобретение не должно быть ограничено ничем, кроме следующей формулы изобретения и ее эквивалентов.
Предусмотрено, что можно создавать различные комбинации или подкомбинации конкретных признаков и аспектов вариантов осуществления, раскрытых выше, и все еще попадать в одно или несколько изобретений. Кроме того, в настоящем документе раскрытие какого-либо конкретного признака, аспекта, способа, свойства, характеристики, качества, атрибута, элемента или тому подобного применительно к варианту осуществления можно использовать во всех других вариантах осуществления, приведенных в настоящем документе. Соответственно, следует понимать, что различные признаки и аспекты раскрытых вариантов осуществления можно комбинировать с или заменять на другие для того, чтобы формировать различные варианты раскрытых изобретений. Таким образом, подразумевают, что объем данных изобретений, раскрытых в настоящем документе, не следует ограничивать конкретными раскрытыми вариантами осуществления, описанными выше. Кроме того, хотя изобретение допускает различные модификации и альтернативные формы, его конкретные примеры представлены на фигурах и подробно описаны в настоящем документе. Однако следует понимать, что изобретение не подлежит ограничению конкретными раскрытыми формами или способами, но, напротив, изобретение предназначено покрывать все модификации, эквиваленты и альтернативы, попадающие в пределы сущности и объема различных описанных вариантов осуществления и приложенной формулы изобретения. Любые способы, описанные в настоящем документе, не обязательно выполнять в указанном порядке. Способы, описанные в настоящем документе, включают определенные действия, предпринимаемые практикующим специалистом; однако они также могут включать какие-либо инструкции третьей стороны для этих действий, или в явной форме или посредством косвенного указания. Например, действия, такие как «введение костного расширителя в первую часть» включает «указание ввести костный расширитель в первую часть». Диапазоны, описанные в настоящем документе, также охватывают любые и все перекрывающиеся поддиапазоны, а также их сочетания. Фразы, такие как «вплоть до», «по меньшей мере», «больше чем», «меньше чем», «между» и т.п., включают указанное число. Числа, которым предшествует такой термин, как «приблизительно», «примерно» и «по существу», как используют в настоящем документе, включают указанные числа, а также представляют количество, близкое к изложенному количеству, которое все еще выполняет желаемую функцию или достигает желаемого результата. Например, термины «приблизительно», «примерно» и «по существу» могут относиться к количеству, которое находится в пределах меньше чем 10%, в пределах меньше чем 5%, в пределах меньше чем 1%, в пределах меньше чем 0,1% и в пределах меньше чем 0,01% от изложенного количества.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированный имплантат и инструменты для его установки | 2016 |
|
RU2621949C1 |
| СПОСОБ УВЕЛИЧЕНИЯ (ВИНТОВОЙ ДИСТРАКЦИИ) КОСТНОЙ ТКАНИ И КОСТНЫЙ ДИСТРАКТОР | 2003 |
|
RU2302218C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ НАРАЩИВАНИЯ КОСТИ | 2010 |
|
RU2575313C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АРТРОПЛАСТИКИ ВЕРТЛУЖНОЙ ВПАДИНЫ | 2009 |
|
RU2596717C2 |
| Индивидуальный выдвижной бедренный компонент с дистанционной дистракцией | 2024 |
|
RU2832380C1 |
| СПОСОБ ЛЕЧЕНИЯ ТЯЖЕЛОЙ ДЕФОРМАЦИИ СТОП У ПАЦИЕНТОВ СТАРШЕ 12 ЛЕТ С БОЛЕЗНЬЮ ШАРКО-МАРИ-ТУС | 2018 |
|
RU2698614C1 |
| СПОСОБ ЛЕЧЕНИЯ ЗАСТАРЕЛЫХ ПОВРЕЖДЕНИЙ ДИСТАЛЬНОГО МЕЖБЕРЦОВОГО СИНДЕСМОЗА С ПОДВЫВИХОМ СТОПЫ | 2002 |
|
RU2216291C1 |
| СПОСОБ ЛЕЧЕНИЯ ИМПРЕССИОННОГО ПЕРЕЛОМА МЕТАЭПИФИЗАРНОГО ОТДЕЛА ТРУБЧАТОЙ КОСТИ | 2010 |
|
RU2444319C1 |
| СПОСОБ ЛЕЧЕНИЯ ДЕФЕКТА ПРОКСИМАЛЬНОГО ОТДЕЛА БЕДРА | 2016 |
|
RU2621538C1 |
| МЕЖПОЗВОНКОВАЯ ВСТАВКА И СЦЕПЛЕННАЯ С НЕЙ ПЛАСТИНА В СБОРЕ | 2009 |
|
RU2506930C2 |
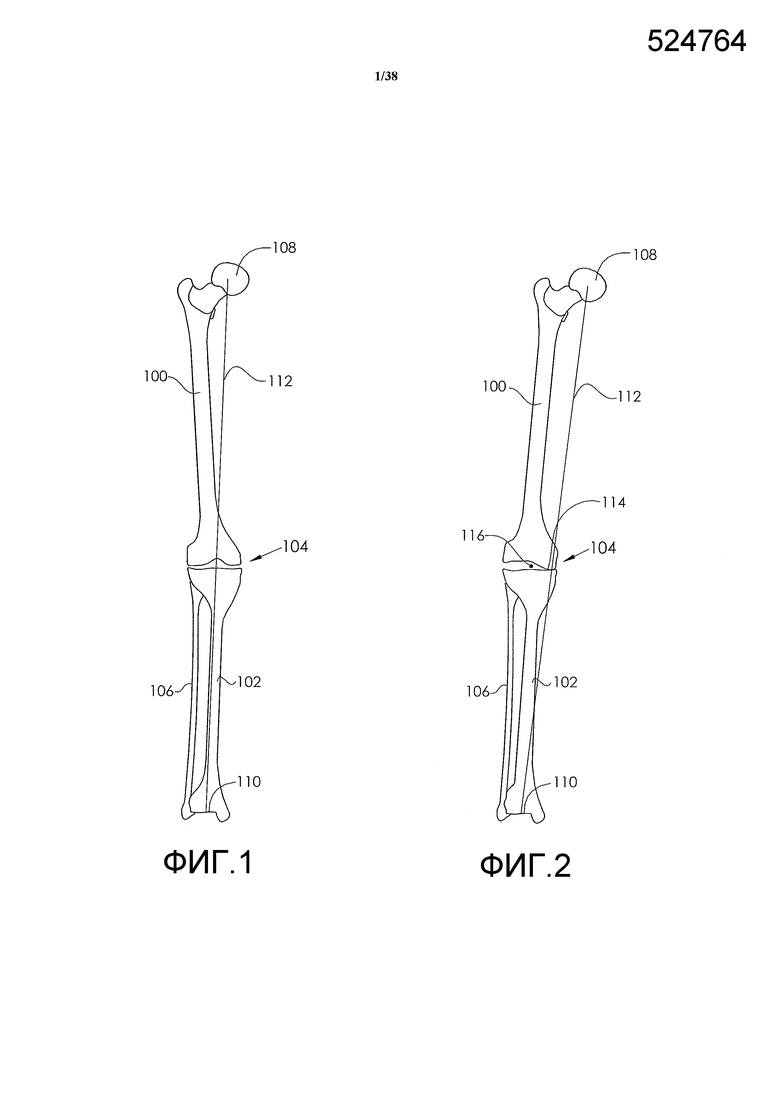
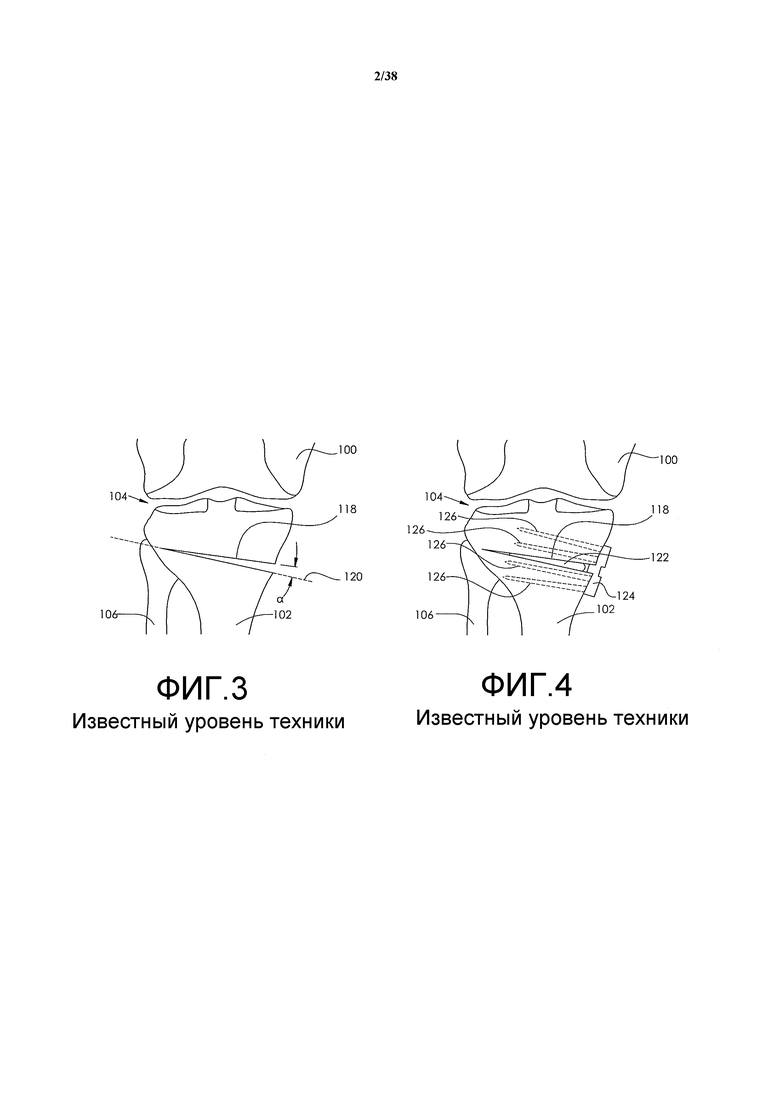
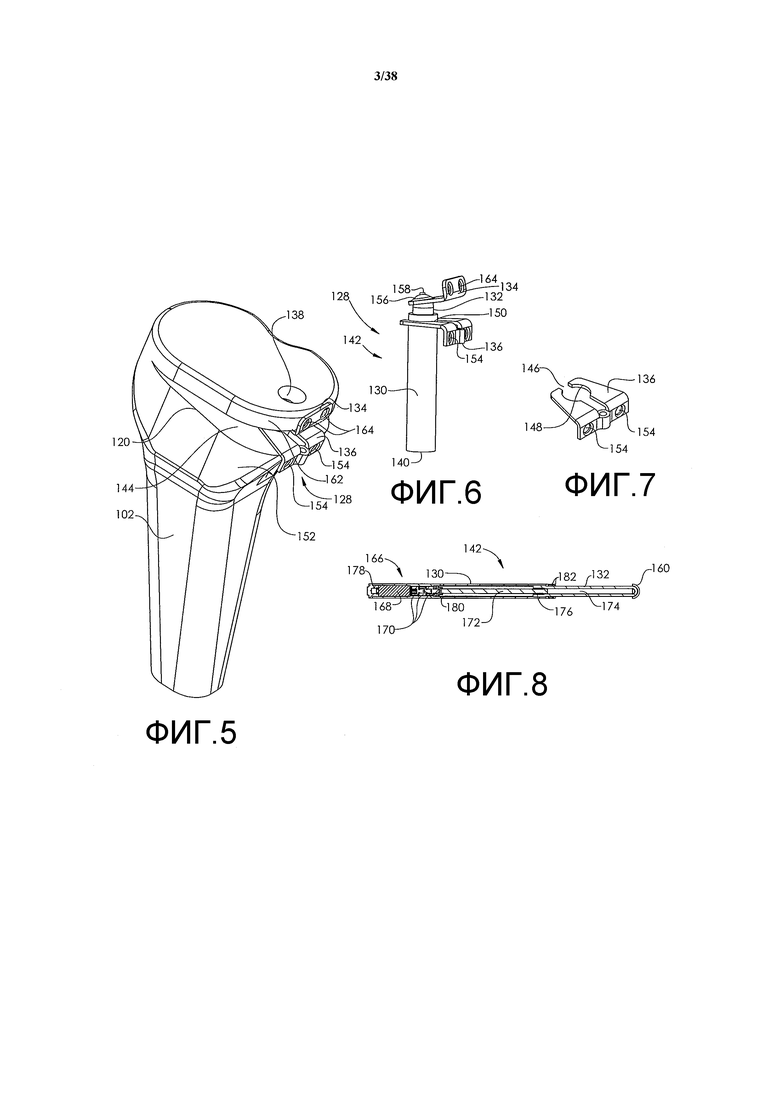


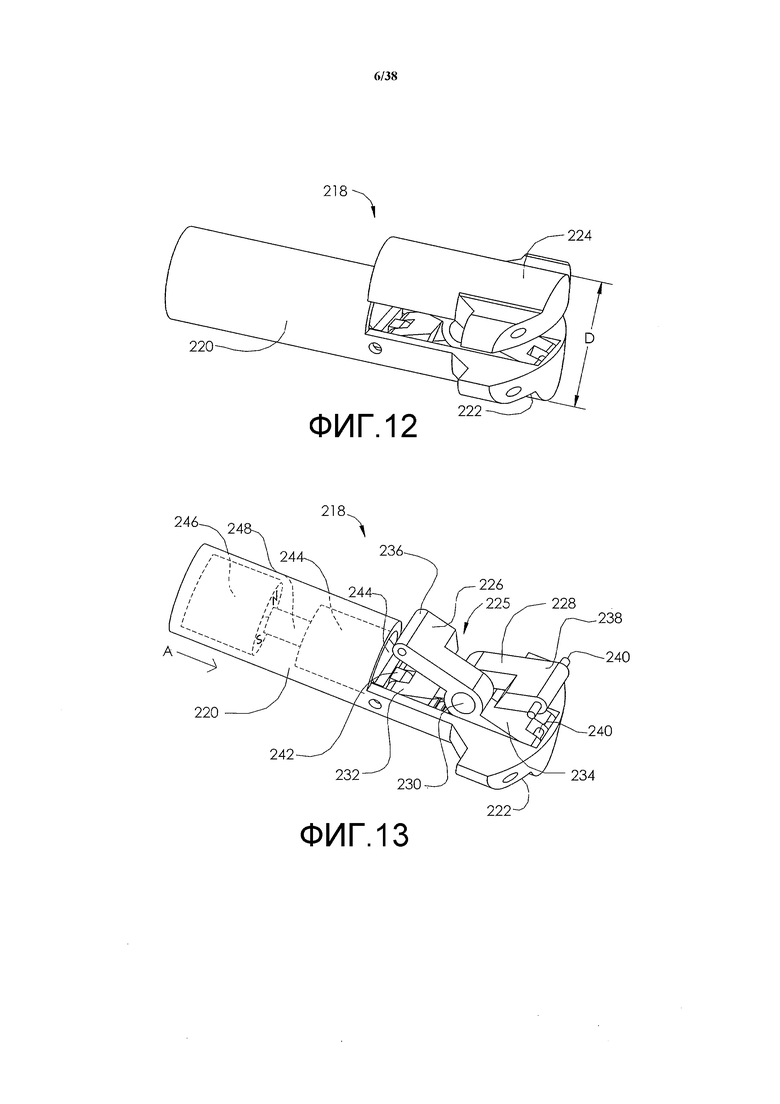



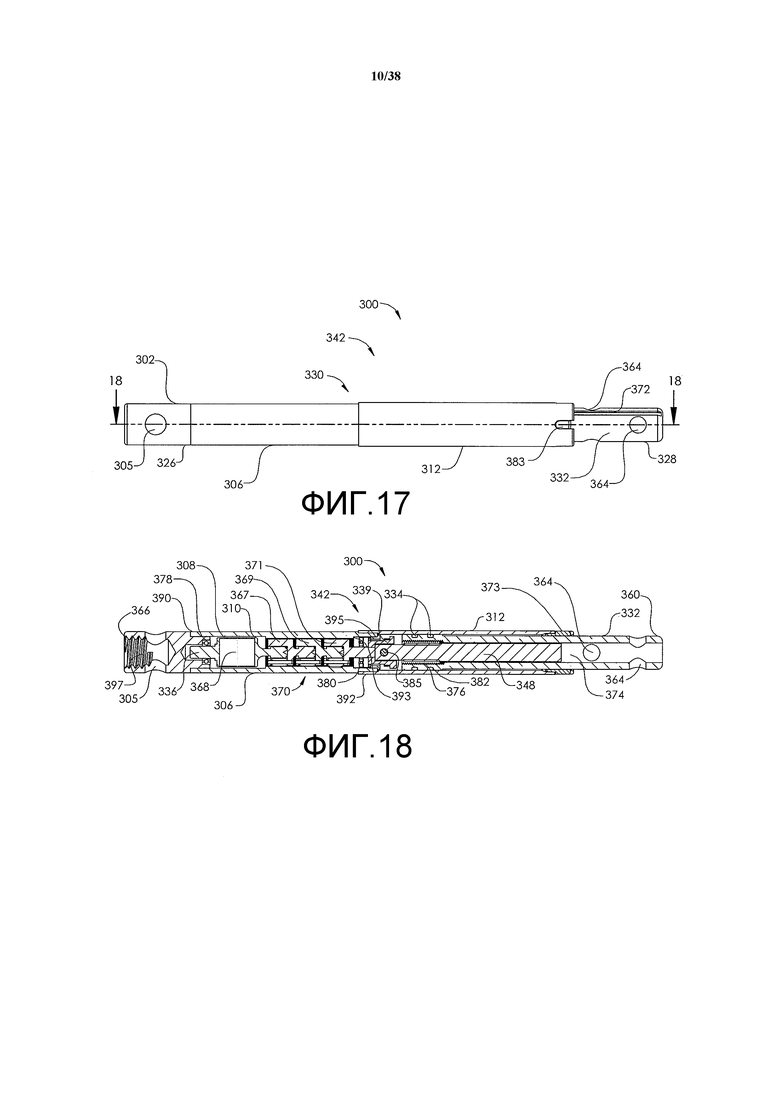


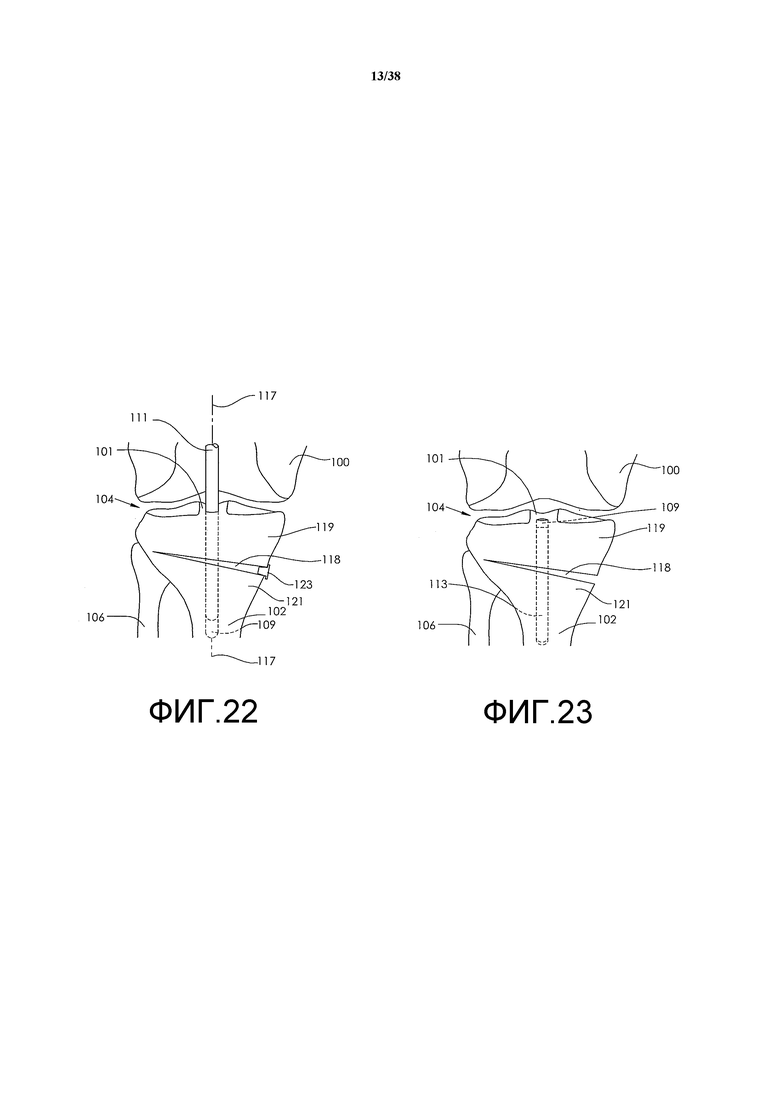










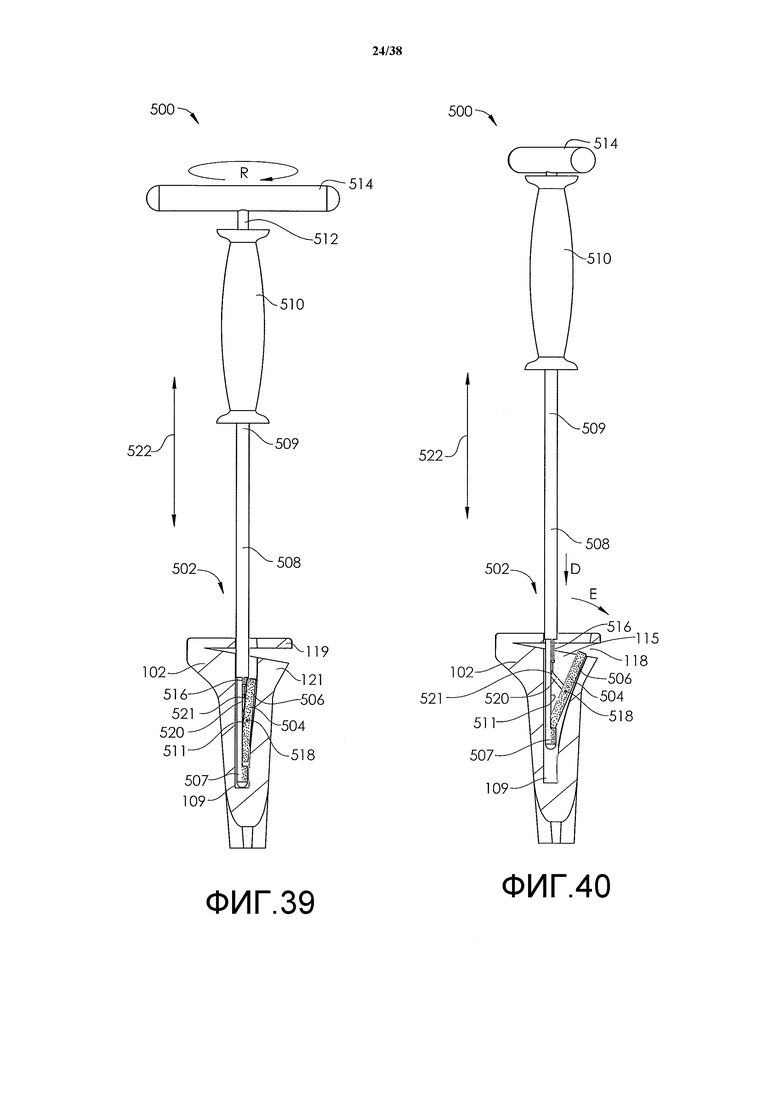
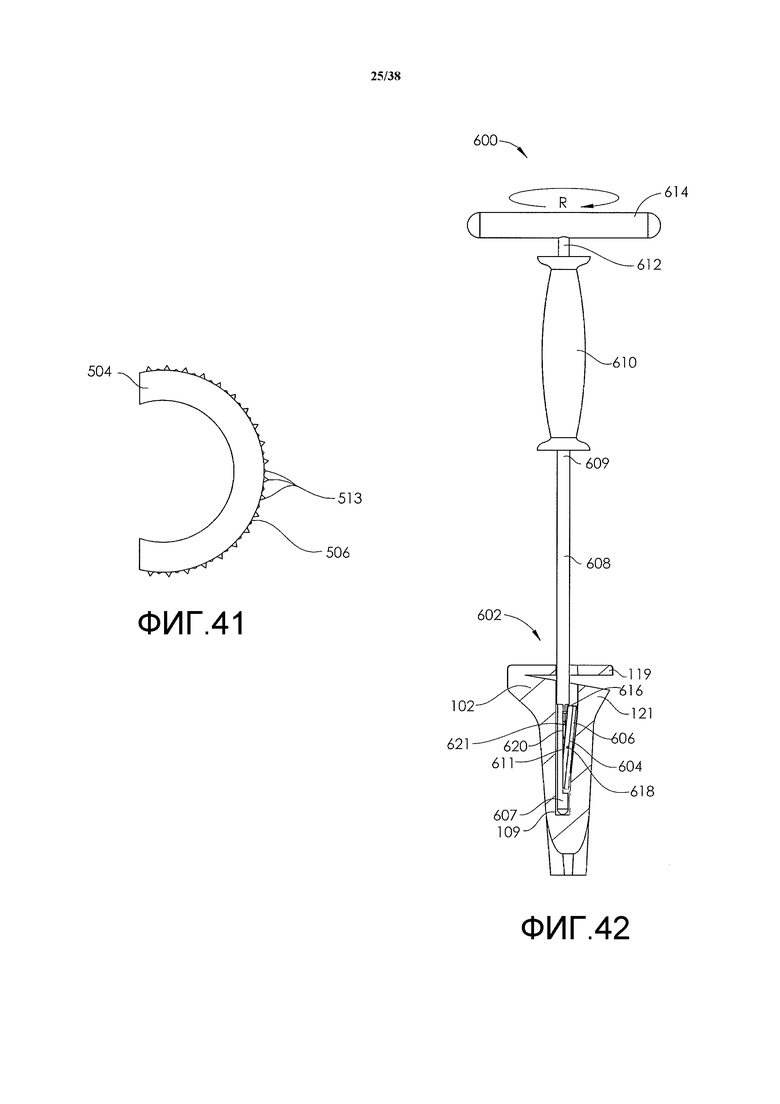
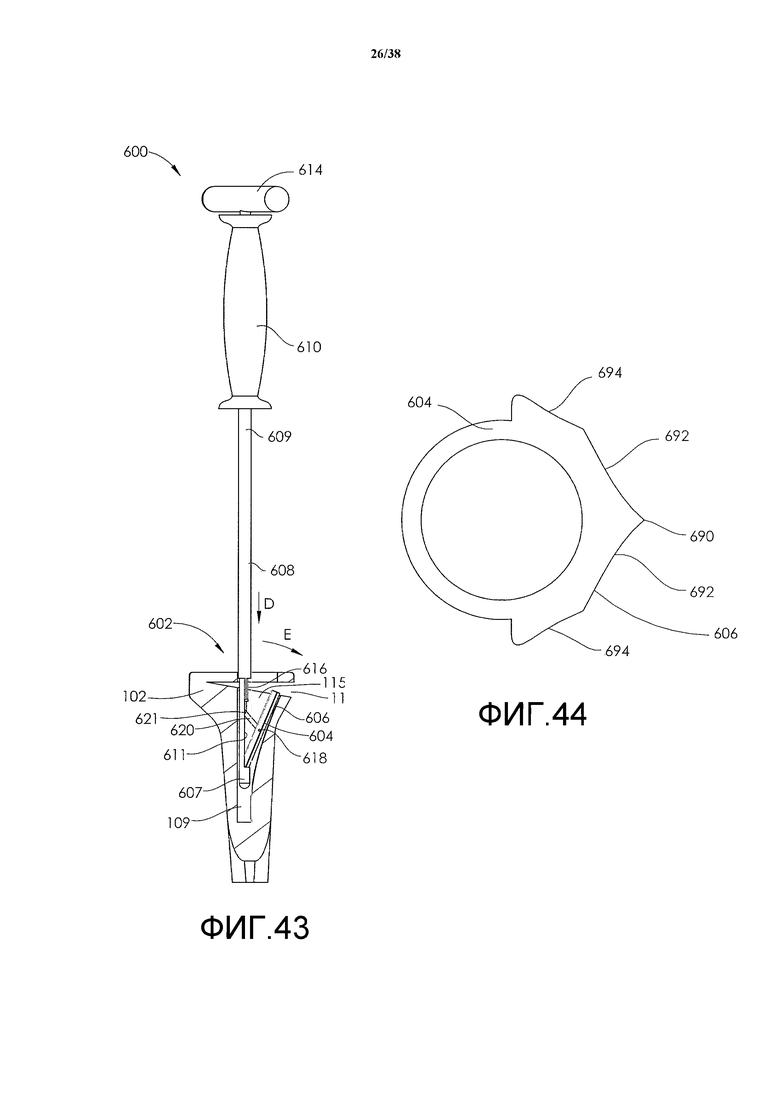











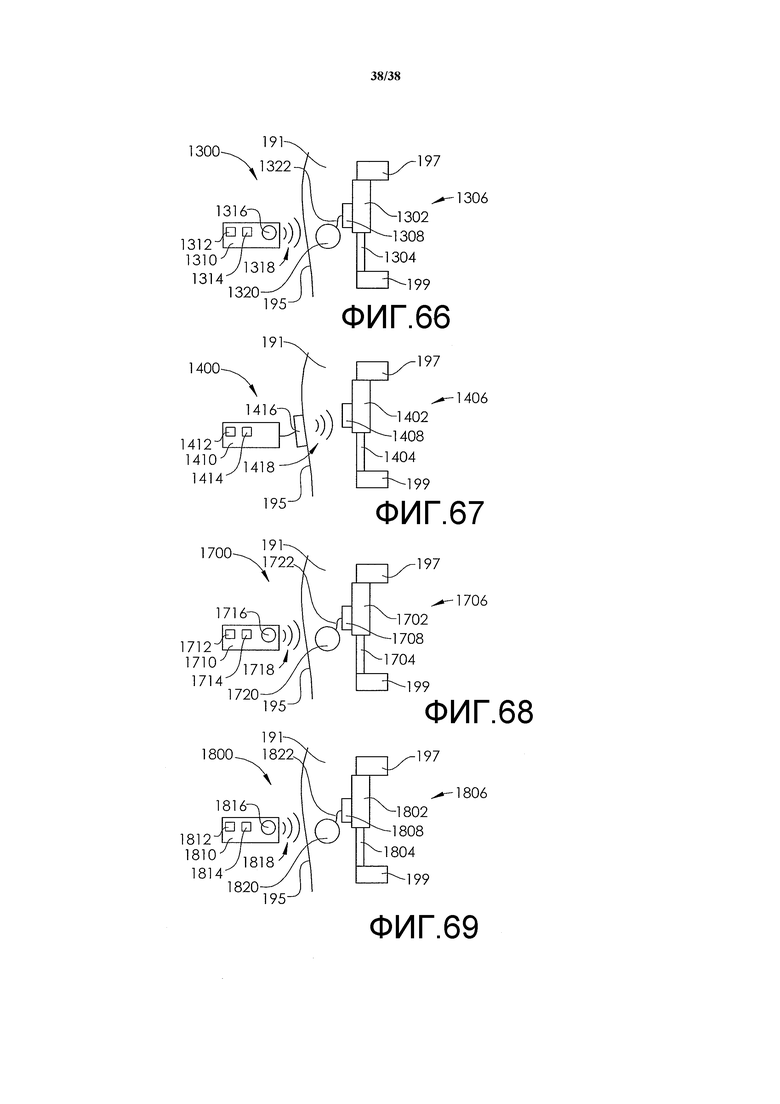
Группа изобретений относится к медицине. Система для изменения угла большой берцовой кости субъекта, имеющего остеоартрит колена, содержит неинвазивно корректируемый имплантат и ведущий элемент. Неинвазивно корректируемый имплантат содержит корректируемый исполнительный механизм, выполненный с возможностью размещения внутри продольной полости внутри большой берцовой кости и имеющий внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе. Внешний корпус выполнен с возможностью соединения с первой частью большой берцовой кости, а внутренний стержень выполнен с возможностью соединения со второй частью большой берцовой кости. Вторая часть большой берцовой кости по меньшей мере частично отделена от первой части большой берцовой кости посредством остеотомии. Ведущий элемент содержит постоянный магнит и выполнен с возможностью удаленного приведения в действие, для того чтобы телескопически смещать внутренний стержень по отношению к внешнему корпусу. Система для изменения угла кости субъекта содержит неинвазивно корректируемый имплантат и ведущий элемент. Неинвазивно корректируемый имплантат содержит корректируемый исполнительный механизм, который имеет внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе. Внешний корпус связан с первым анкерным отверстием, а внутренний стержень связан со вторым анкерным отверстием. Первое анкерное отверстие выполнено с возможностью пропускать первый анкер для соединения корректируемого исполнительного механизма с первой частью кости. Второе анкерное отверстие выполнено с возможностью пропускать второй анкер для соединения корректируемого исполнительного механизма со второй частью кости. Вторая часть кости по меньшей мере частично отделена от первой части кости посредством остеотомии. Ведущий элемент выполнен с возможностью удаленного приведения в действие, для того чтобы телескопически смещать внутренний стержень по отношению к внешнему корпусу. Неинвазивно корректируемый имплантат выполнен с возможностью быть неограниченным по углу по отношению к по меньшей мере одной из первой части кости или второй части кости, когда соединен как с первой частью, так и со второй частью кости. Изобретения обеспечивают предотвращение утраты угла коррекции. 2 н. и 18 з.п. ф-лы, 69 ил.
1. Система для изменения угла большой берцовой кости субъекта, имеющего остеоартрит колена, содержащая:
неинвазивно корректируемый имплантат, который содержит корректируемый исполнительный механизм, выполненный с возможностью размещения внутри продольной полости внутри большой берцовой кости и имеющий внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе, при этом внешний корпус выполнен с возможностью соединения с первой частью большой берцовой кости, а внутренний стержень выполнен с возможностью соединения со второй частью большой берцовой кости, причем вторая часть большой берцовой кости по меньшей мере частично отделена от первой части большой берцовой кости посредством остеотомии; и
ведущий элемент, который содержит постоянный магнит и выполнен с возможностью удаленного приведения в действие, для того чтобы телескопически смещать внутренний стержень по отношению к внешнему корпусу.
2. Система по п. 1, где внешний корпус содержит изгиб Герцога.
3. Система по п. 2, где изгиб Герцога проходит под углом между 8° и 12° от главной оси внешнего корпуса.
4. Система по п. 1, где постоянный магнит содержит радиально-полюсной редкоземельный магнит.
5. Система по п. 1, где внутренний стержень можно выдвигать по меньшей мере на 9 мм из внешнего корпуса.
6. Система для изменения угла кости субъекта, содержащая:
неинвазивно корректируемый имплантат, который содержит корректируемый исполнительный механизм, который имеет внешний корпус и внутренний стержень, телескопически расположенный во внешнем корпусе, при этом внешний корпус связан с первым анкерным отверстием, а внутренний стержень связан со вторым анкерным отверстием, при этом первое анкерное отверстие выполнено с возможностью пропускать первый анкер для соединения корректируемого исполнительного механизма с первой частью кости, а второе анкерное отверстие выполнено с возможностью пропускать второй анкер для соединения корректируемого исполнительного механизма со второй частью кости, вторая часть кости по меньшей мере частично отделена от первой части кости посредством остеотомии;
ведущий элемент, выполненный с возможностью удаленного приведения в действие для, того чтобы телескопически смещать внутренний стержень по отношению к внешнему корпусу,
причем неинвазивно корректируемый имплантат выполнен с возможностью быть неограниченным по углу по отношению к по меньшей мере одной из первой части кости или второй части кости, когда соединен как с первой частью, так и со второй частью кости.
7. Система по п. 6, где ведущий элемент содержит постоянный магнит.
8. Система по п. 6, где ведущий элемент содержит двигатель с индуктивной связью.
9. Система по п. 6, где ведущий элемент содержит двигатель, приводимый в действие ультразвуком.
10. Система по п. 6, где ведущий элемент содержит подкожный гидравлический насос.
11. Система по п. 6, где ведущий элемент содержит исполнительный механизм, приводимый в движение за счет памяти формы.
12. Система по п. 6, где первое анкерное отверстие проходит через первую пластину, идущую от внешнего корпуса, причем первая пластина выполнена с возможностью размещения вблизи от внешней поверхности кости.
13. Система по п. 12, где второе анкерное отверстие проходит через вторую пластину, которая идет от внутреннего стержня, вторая пластина выполнена с возможностью размещения вблизи от внешней поверхности кости.
14. Система по п. 6, где неинвазивно корректируемый имплантат выполнен с возможностью изменения угла большой берцовой кости субъекта, имеющего остеоартрит колена.
15. Система по п. 6, где постоянный магнит содержит радиально-полюсной редкоземельный магнит.
16. Система по п. 6, где внутренний стержень выдвигается по меньшей мере на 9 мм из внешнего корпуса.
17. Система по п. 6, которая дополнительно содержит втулку, выполненную с возможностью поворачиваться по отношению к по меньшей мере одному из первого анкерного отверстия или второго анкерного отверстия.
18. Система по п. 17, где втулка имеет внутренний диаметр для прохождения по меньшей мере одного из первого анкера или второго анкера.
19. Система по п. 17, где втулка имеет цилиндрическую ось, при этом втулка не может вращаться относительно цилиндрической оси.
20. Система по п. 6, где корректируемый исполнительный механизм выполнен с возможностью размещения внутри продольной полости внутри кости.
| US2012209265A1, 16.08.2012 | |||
| СТЕРЖЕНЬ ДЛЯ ФИКСАЦИИ ПОЛОЖЕНИЯ И ФОРМЫ ТРУБЧАТЫХ КОСТЕЙ | 2010 |
|
RU2452426C1 |
| Устройство для удлинения кости | 1981 |
|
SU1029958A1 |
| Устройство для фиксации костных отломков | 1977 |
|
SU707580A1 |
| US2010249837А1, 11.08.2011 | |||
| WO2005092219А1, 06.10.2005. | |||

