Предлагаемое изобретение относится к сельскому хозяйству и может быть использовано для автоматизированного орошения сельскохозяйственных культур с помощью электрифицированных дождевальных машин кругового действия.
Известен оросительный комплекс (Авторское свидетельство СССР №1132867, A01G 25/09, опубл. 07.01.85, Бюл. №1. – аналог), включающий закрытую оросительную сеть с дистанционно управляемым регулятором подачи воды в открытый оросительный канал и дождевальную машину фронтального действия.
Недостатком аналога является неэффективное использование водных и энергетических ресурсов, а также высокие затраты на обустройство и содержание данного комплекса. Автоматизация работы дождевальной машины фронтального действия требует строительства открытого оросительного канала вдоль орошаемого участка, при этом транспортировка воды по каналу приводит к значительным потерям воды на испарения и фильтрацию, что ведет к неэффективному использованию водных и энергетических ресурсов. Также при эксплуатации открытого канала требуется периодически производить его очистку от наносов, ила и сорной растительности, не допускать произрастания на его элементах кустарниковой и травянистой растительности. Все это ведет к значительным затратам на обустройство и эксплуатацию данного оросительного комплекса.
В настоящее время наибольшее распространение получили оросительные комплексы, основанные на использовании дождевальных машин кругового действия, которые позволяют орошать участки со сложным рельефом и с большими уклонами, также круговые машины имеют более широкие возможности автоматизации при обеспечении их электропитанием по электросети. Однако орошаемые участки зачастую располагаются на значительном удалении от линий электропередач и трансформаторных подстанций, и в некоторых случаях подвод к месту установки машины электрического кабеля сопряжен со значительными затратами и трудностями. В таких ситуациях наиболее рационально в качестве источника электроэнергии использовать солнечные батареи, размещаемые на элементах конструкции дождевальных машин, такое решение повышает уровень автономности машин и сохраняет высокие возможности автоматизации процесса полива.
Известна электрифицированная дождевальная машина кругового действия (Патент РФ №2646909 С1, A01G 25/09, опубл. 12.03.2018, Бюл. №8. – прототип), содержащая неподвижную опору с поворотным коленом, управляемую электрическую задвижку, служащую для подачи воды из закрытой оросительной сети, дождевальные насадки, водопроводящий трубопровод, образованный шарнирно сочлененными друг с другом пролетами, состоящими из шпренгельной фермы, размещенной на самоходной тележке с электроприводом, на неподвижной опоре установлена опирающаяся на монорельс платформа, вращаемая вместе с трубопроводом машины, на платформе размещены солнечные батареи, ветряная турбина с электрогенератором, аккумуляторные батареи, инвертор и пульт управления.
К недостаткам прототипа можно отнести следующее.
На поворотной платформе можно разместить небольшое число солнечных батарей, что ограничивает объем вырабатываемой энергии и, соответственно, ограничивает число пролетов в составе машины. Наиболее целесообразно размещать солнечные батареи непосредственно на самих пролетах, что позволит увеличивать генерируемую мощность пропорционально числу пролетов в машине. Также от расположенной в центре платформы ветряной турбины на часть солнечных батарей будет отбрасываться тень, приводящая к снижению эффективности выработки электроэнергии. Кроме того, прототип не позволяет экономно расходовать энергетические и водные ресурсы, так как в нем отсутствует возможность автоматической корректировки поливных норм и графика полива в зависимости от таких факторов окружающей среды как погодные условия, влажность почвы, объем и давность атмосферных осадков. Также данная машина имеет низкий уровень автоматизации, так как ее конструкция предполагает ручное управление и не имеет никаких средств связи, и систем определяющих положение ее трубопровода.
Технической задачей изобретения является повышение уровня автоматизации и автономности оросительного комплекса, обеспечение экономного расходования энергетических и водных ресурсов за счет автоматической корректировки поливных норм и графика полива в зависимости от погодных условий, влажности почвы, объема и давности атмосферных осадков, а также повышение эффективности электропитания дождевальной машины от солнечных батарей.
Задача достигается тем, что в роботизированном оросительном комплексе, включающем трубопровод закрытой оросительной сети с управляемой электрической задвижкой и электрифицированную дождевальную машину кругового действия, содержащую неподвижную опору, шарнирно сочлененные друг с другом пролеты, представляющие собой шпренгельную ферму с водопроводящим трубопроводом, один конец которой размещен на самоходной тележке с электроприводом, солнечные батареи, инвертор, аккумуляторные батареи, дождевальные насадки, где согласно изобретению солнечные батареи при помощи кронштейнов закреплены на водопроводящем трубопроводе каждого пролета, при этом солнечные батареи размещены над трубопроводом и расположены в одной горизонтальной плоскости, также солнечные батареи объединены по последовательно-параллельной схеме в единую цепь, которая соединена через контроллер с трехфазным инвертором и с основной и резервной аккумуляторной батареей, размещенными в шкафу, установленным на фундаменте рядом с неподвижной опорой, которая в свою очередь дополнительно оснащена метеостанцией, содержащей термометр, гигрометр, анеморумбометр и дождемер, служащий для регистрации количества естественных атмосферных осадков, кроме того, самоходные тележки оснащены датчиками влажности почвы, которые установлены с возможностью принудительного заглубления на различную глубину плодородного слоя и извлечения их перед началом движения машины, для обеспечения автономного управления и корректировки поливных норм и графика поливов, на основе обработки данных, получаемых от датчиков влажности почвы и метеостанции, машина оснащена бортовым компьютером, установленным в верхней части крайней тележки и оснащенным модемом с резервным каналом связи, обеспечивающим связь с сетью Интернет по радиоканалу, также бортовой компьютер снабжен приемником GPS/ГЛОНАСС для определения азимута трубопровода машины в режиме реального времени, кроме того, для использования электроэнергии, вырабатываемой во время простоя машины, на неподвижной опоре дополнительно установлен электрический соединитель.
С целью увеличения аккумулирующей мощности машина оснащена несколькими резервными аккумуляторными батареями, размещенными в модульных шкафах.
На крайней тележке дополнительно установлен электрический соединитель, обеспечивающий возможность использования электроэнергии, вырабатываемой во время простоя машины.
В предлагаемом техническом решении солнечные батареи размещены на пролетах дождевальной машины, что позволяет увеличивать генерируемую мощность с ростом числа пролетов в машине. При этом солнечные батареи установлены сверху водопроводящего трубопровода, что исключает отбрасывание теней на их рабочую поверхность от конструкционных элементов машины. А учитывая, что в процессе работы круговой машины ее трубопровод постоянно изменяет свое положение относительно солнца, то наиболее рационально располагать солнечные батареи в одной горизонтальной плоскости, при таком положении все солнечные батареи будут обладать одинаковым потенциалом для выработки электроэнергии. Также для энергообеспечения машины может быть задействована одна или несколько резервных аккумуляторных батарей, что позволяет увеличить время работы машины, а также производить заряд основной батареи не прекращая ее движение. Кроме того, на неподвижной опоре машины смонтирована метеостанция, позволяющая отслеживать изменение температуры и влажности воздуха, направления и силы ветра, а на самоходных тележках установлены с возможностью принудительного погружения на различную глубину плодородного слоя датчики влажности почвы, что позволяет измерять влажность почвы на необходимой глубине в момент простоя машины. Также дождевальная машина оснащена бортовым компьютером, который на основании анализа данных, поступающих от метеостанции и датчиков влажности почвы, корректирует график поливов и поливные нормы. Например, если перед поливом влажность почвы находится на достаточно высоком уровне, то бортовой компьютер принимает решение о переносе полива на более позднее время, или если недавно прошли обильные атмосферные осадки, то компьютер с учетом их объема корректирует поливную норму для последующего полива. Также на основании данных от метеостанции определяются потери искусственного дождя на испарение и снос дождевого облака ветром, данные потери компенсируются алгоритмами компьютера путем корректировки поливных норм. Все это позволяет экономно расходовать энергетические и водные ресурсы. Кроме того, бортовой компьютер снабжен модемом с резервным каналом связи, что позволяет осуществлять дистанционное управление машиной и мониторинг ее работы, а также отправлять управляющие сигналы на насосную станцию. Оснащение бортового компьютера приемником GPS/ГЛОНАСС позволяет определять азимут трубопровода машины в режиме реального времени. Дождевальная машина дополнительно оснащена электрическим соединителем, позволяющим использовать электроэнергию, генерируемую солнечными батареями во время простоя машины.
Предлагаемое техническое решение позволит повысить уровень автоматизации и автономности роботизированного оросительного комплекса, обеспечит экономное расходование энергетических и водных ресурсов, а также повысит эффективность электропитания дождевальной машины от солнечных батарей.
Сущность изобретения поясняется чертежами.
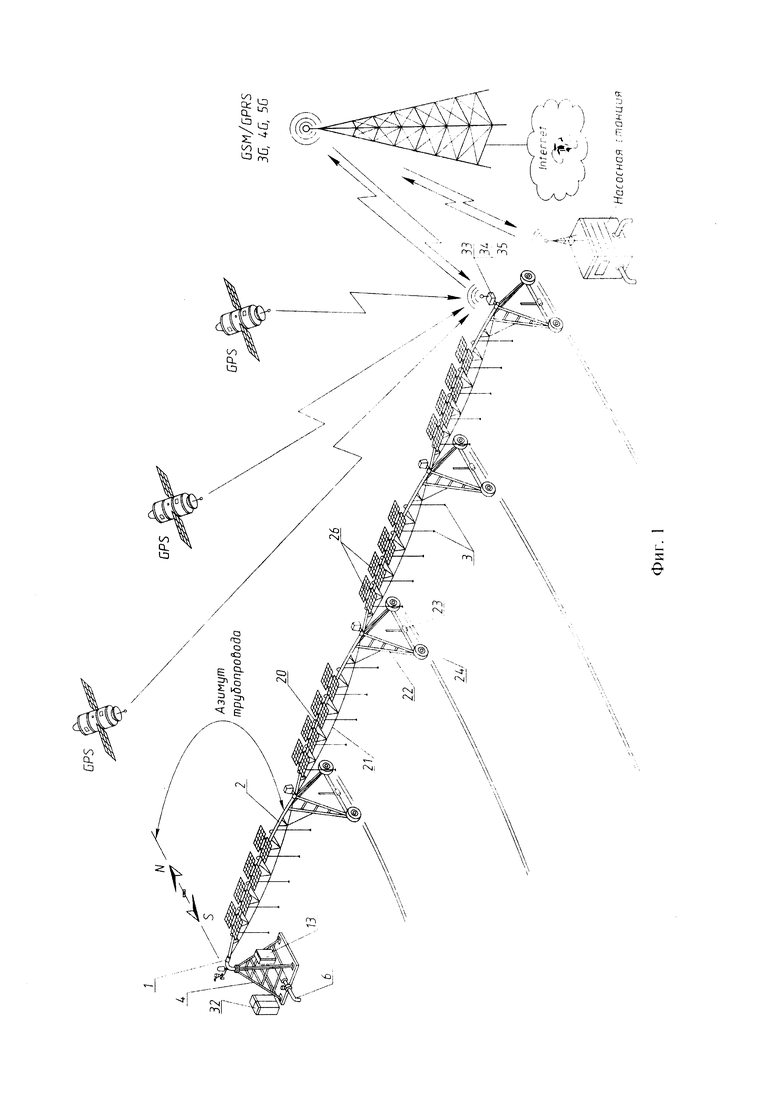
На фиг. 1 изображен роботизированный оросительный комплекс;
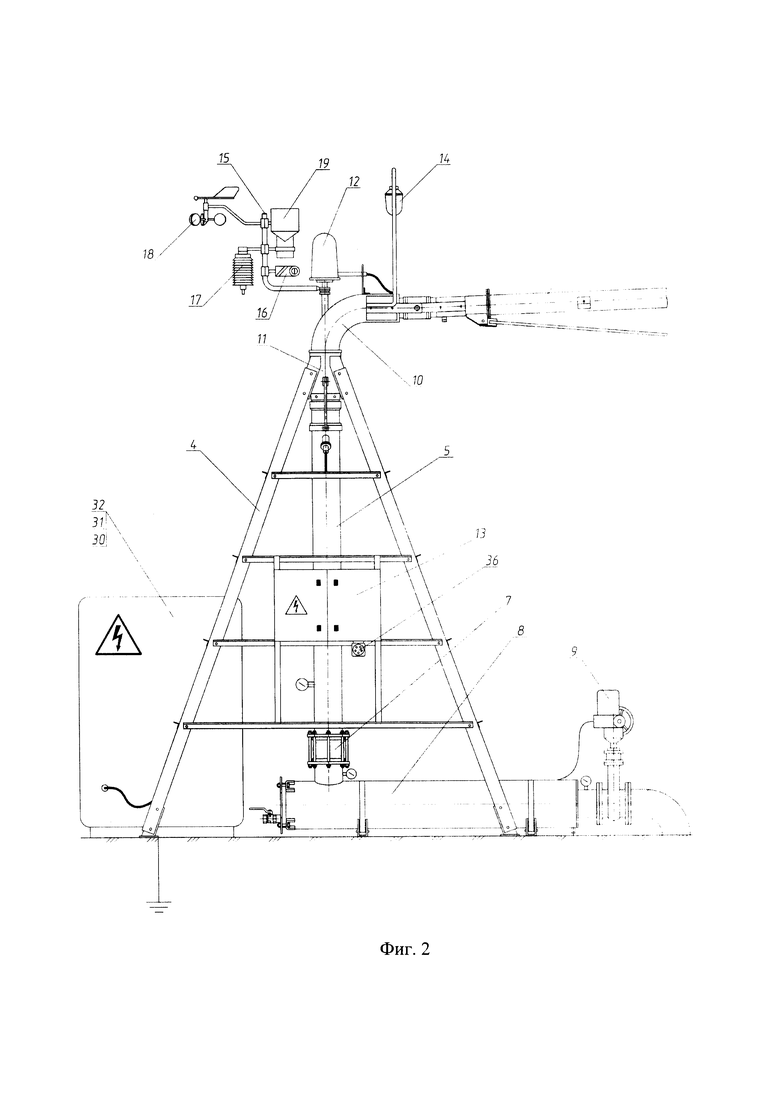
на фиг. 2 изображена неподвижная опора дождевальной машины;
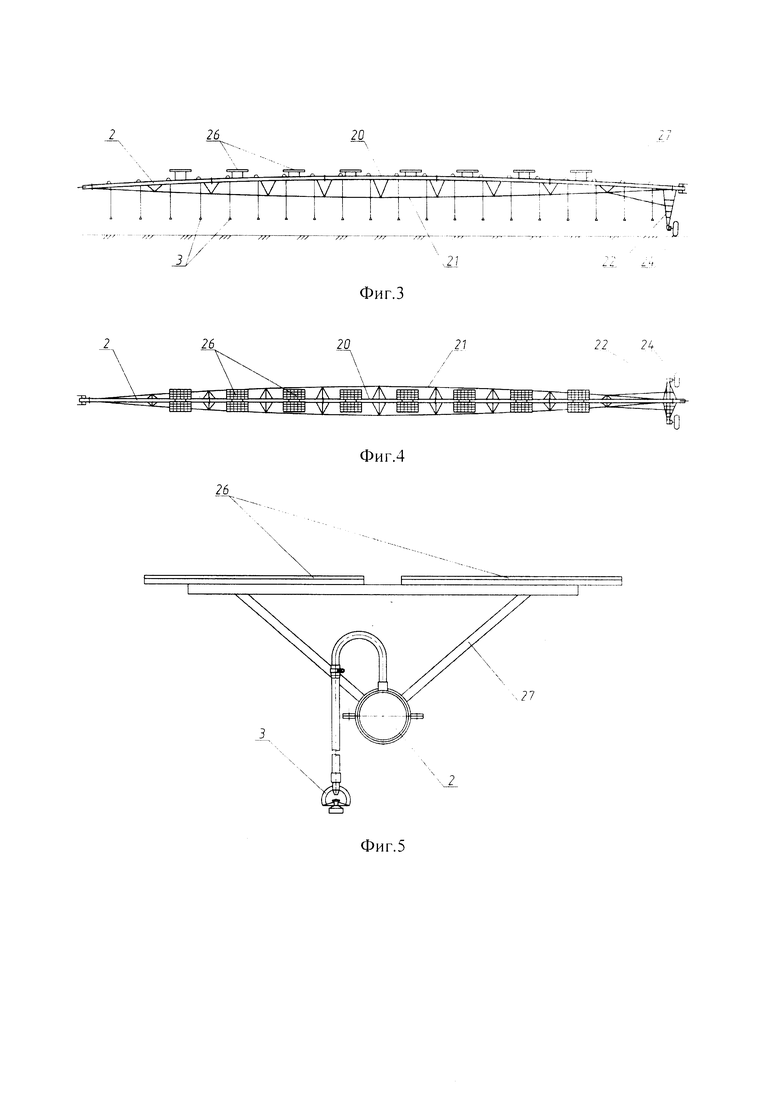
на фиг. 3 представлен пролет дождевальной машины, вид сбоку;
на фиг. 4 то же, вид сверху;
на фиг. 5 показано крепление солнечных батарей на трубопроводе пролета с помощью кронштейнов;
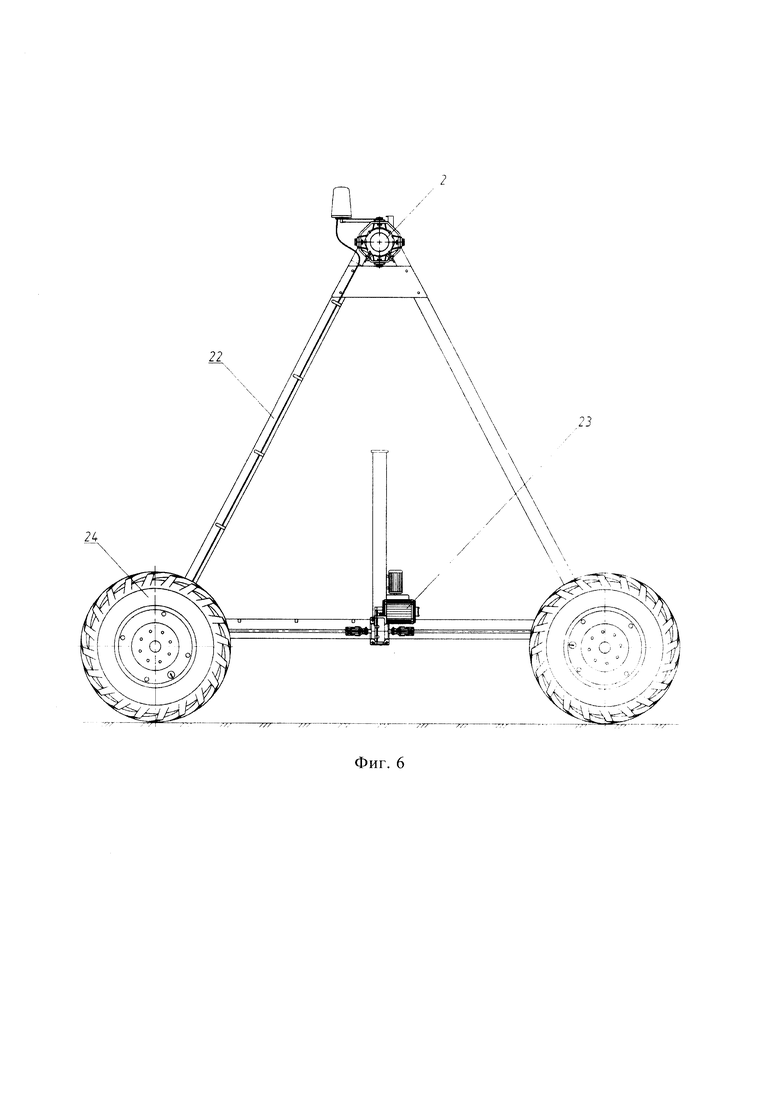
на фиг. 6 изображена самоходная тележка;
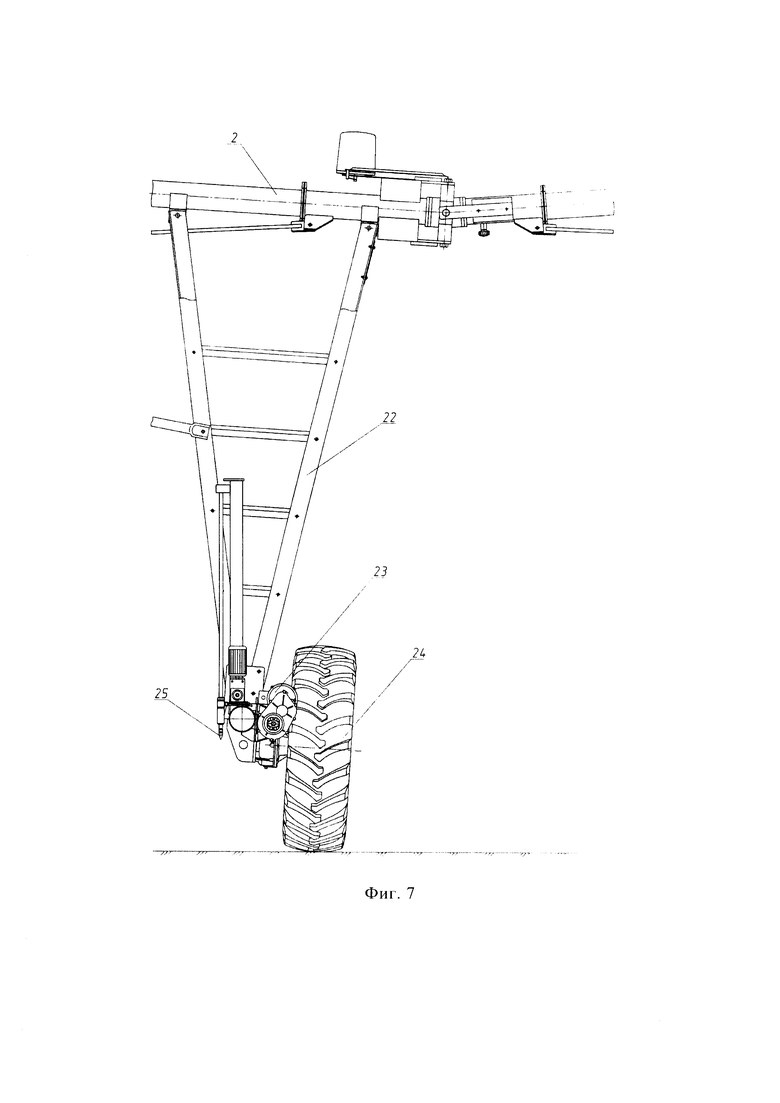
на фиг. 7 то же, вид сбоку, в разрезе;
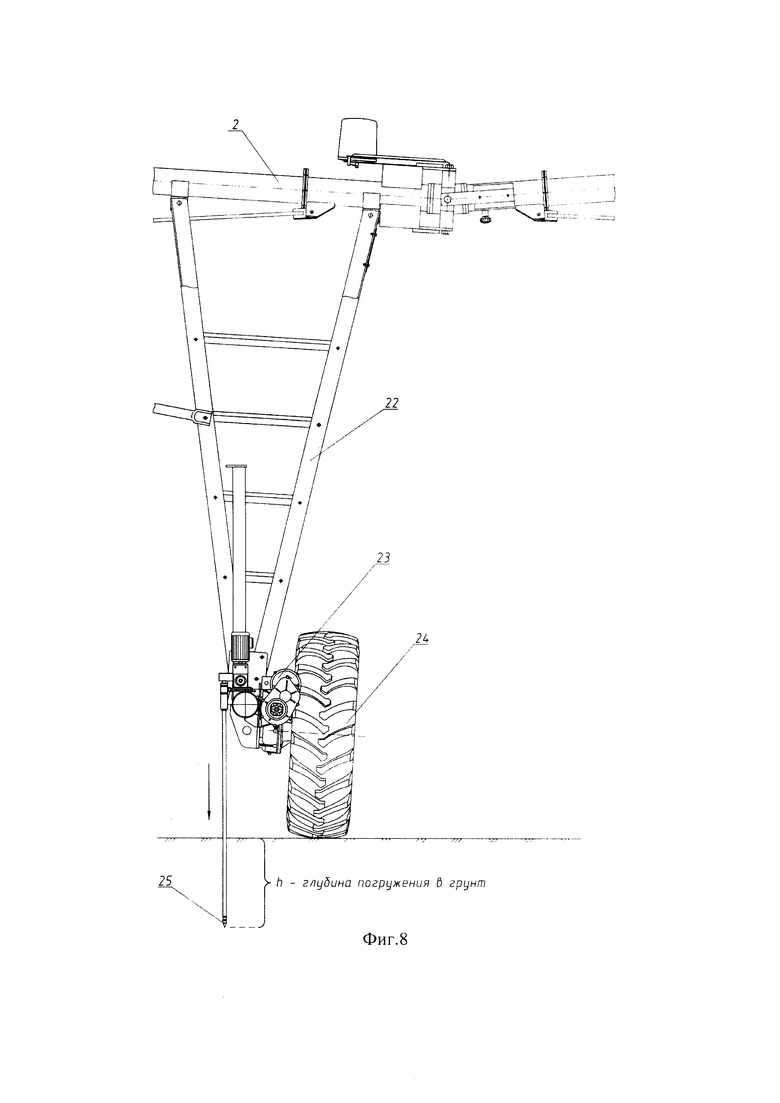
на фиг. 8 показана самоходная тележка с заглубленным датчиком влажности почвы, вид сбоку, в разрезе;
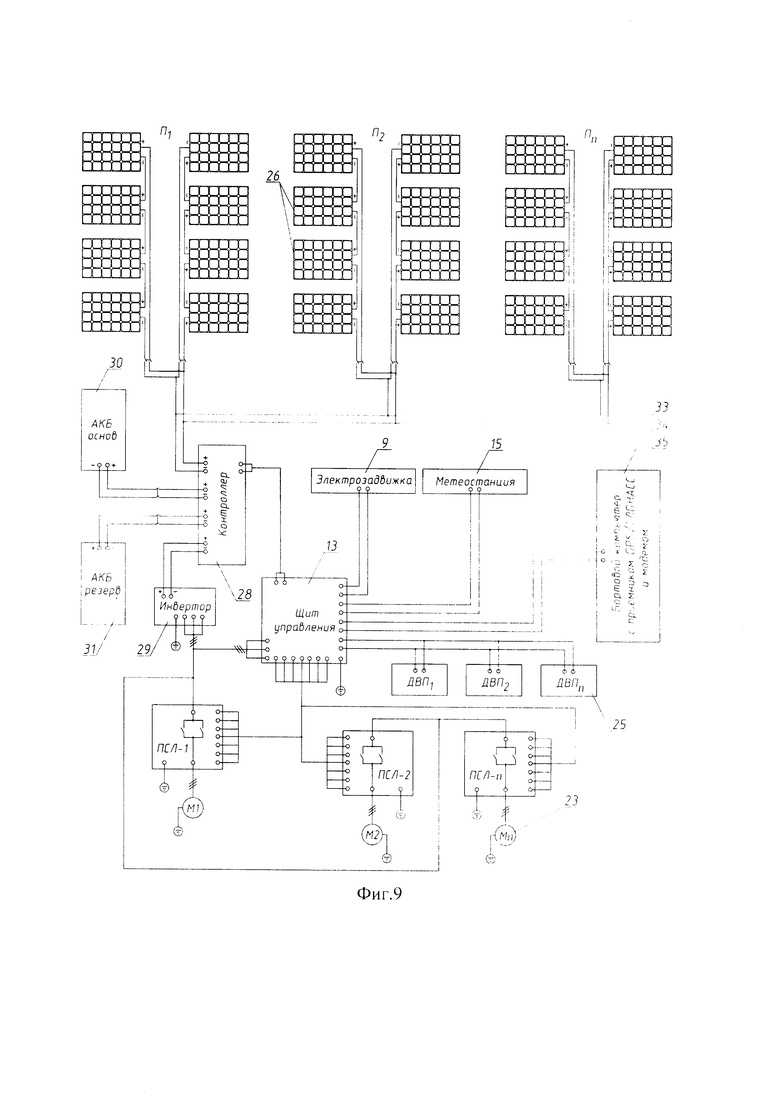
на фиг. 9 показана схема электропитания оросительного комплекса.
Роботизированный оросительный комплекс (фиг. 1) включает электрифицированную дождевальную машину 1, работающую в движении по кругу, путем перемещения водопроводящего трубопровода 2 с дождевальными насадками 3 вокруг неподвижной опоры 4. Вода к стояку 5 неподвижной опоры 4 (фиг. 2) подается от трубопровода закрытой оросительной сети 6 через регулятор давления 7, фильтр 8 и электрическую задвижку 9, которая автоматически управляется с помощью электрических сигналов, поступающих от машины 1. Водопроводящий трубопровод 2 шарнирно соединен с поворотным коленом 10, которое образует с обоймой 11 упорный подшипник, обеспечивающий возможность перемещения трубопровода 2 вокруг неподвижной опоры 4. Для передачи электроэнергии и управляющих сигналов с неподвижной опоры 4 на подвижную часть машины 1, на поворотном колене 10 установлен электрический кольцевой коллектор 12. Неподвижная опора оснащена щитом управления 13, сигнальным фонарем 14 и метеостанцией 15, содержащей термометр 16, гигрометр 17, анеморумбометр 18 и дождемер 19.
Водопроводящий трубопровод 2 дождевальной машины 1 образован из последовательно шарнирно соединенных пролетов 20 (фиг. 3-5), каждый из которых содержит шпренгельную ферму 21, размещенную одним концом на самоходной тележке 22 с электроприводом 23 и пневмоколесами 24 (фиг. 6). На самоходных тележках 22 установлены с возможностью принудительного погружения на различную глубину плодородного слоя датчики влажности почвы 25 (фиг. 7, 8), что позволяет измерять влажность почвы на необходимой глубине в момент простоя машины 1. Перед началом движения дождевальной машины 1 датчики влажности почвы 25 принудительно извлекаются из грунта.
Обеспечение дождевальной машины 1 электроэнергией осуществлено от солнечных батарей 26, которыми оснащается каждый из пролетов 20, что позволяет увеличивать генерируемую мощность с ростом числа пролетов 20 в машине 1. Солнечные батареи 26 при помощи кронштейнов 27 закреплены на водопроводящем трубопроводе 2 пролета 20 (фиг. 5), при этом солнечные батареи 26 размещены над трубопроводом 2 и расположены в одной горизонтальной плоскости. При таком положении все солнечные батареи 26 будут обладать одинаковым потенциалом для выработки электроэнергии, а также будет исключено отбрасывание теней на их рабочую поверхность от конструкционных элементов машины 1. Солнечные батареи 26 объединены по последовательно-параллельной схеме в единую электрическую цепь (фиг. 9), которая соединена через контроллер 28 с трехфазным инвертором 29 и с основной и резервной аккумуляторной батареей 30 и 31, размещенными в шкафу 32, установленным на фундаменте рядом с неподвижной опорой 4. Соединение солнечных батарей 26 по последовательно-параллельной схеме позволяет повысить напряжение в сети с увеличением тока. Для питания силовой и управляющей электросети дождевальной машины 1 трехфазный инвертор 29 преобразует постоянный ток в переменный с изменением величины напряжения. Использование резервной аккумуляторной батареи 31 для энергообеспечения дождевальной машины 1, позволяет увеличить время безостановочной работы машины 1, а также, не прекращая ее работы, производить заряд основной батареи 30.
Для управления процессом полива дождевальная машина 1 оснащена бортовым компьютером 33, установленным в верхней части крайней тележки 22. С целью осуществления мониторинга и дистанционного управления оросительным комплексом бортовой компьютер 33 оснащен модемом 34 с резервным каналом связи, обеспечивающим передачу данных через сеть Интернет по радиоканалу. Также бортовой компьютер 33 снабжен приемником сигналов GPS/ГЛОНАСС 35 для определения азимута трубопровода 2 машины 1 в режиме реального времени. Бортовой компьютер 33 на основании сбора и анализа данных, поступающих от метеостанции 15 и датчиков влажности почвы 25, корректирует график поливов и поливные нормы.
Для использования электроэнергии, вырабатываемой во время простоя машины 1, на неподвижной опоре 4 дополнительно установлен электрический соединитель 36.
С целью увеличения аккумулирующей мощности дождевальная машина 1 может быть снабжена несколькими резервными аккумуляторными батареями 31, размещенными в модульных шкафах 32.
На крайней тележке 22 может быть дополнительно установлен электрический соединитель 36, обеспечивающий возможность использования электроэнергии, вырабатываемой во время простоя машины 1.
Роботизированный оросительный комплекс работает следующим образом.
При нахождении дождевальной машины 1 в простое ее бортовой компьютер 33 переводится в энергосберегающий режим, продолжая при этом поддерживать связь по радиоканалу с сетью Интернет при помощи модема 34. Также по мере необходимости производится зарядка аккумуляторных батарей 30 и 31 за счет электроэнергии, вырабатываемой солнечными батареями 26.
В начале поливного сезона в память бортового компьютера 33 по сети Интернет загружаются данные по режиму орошения, содержащие график поливов, поливные нормы, а также эрозионно допустимые нормы.
Перед началом полива бортовой компьютер 33 дает команду для извлечения датчиков влажности почвы 25 из грунта, затем по сети Интернет передается команда для запуска насосной станции. После того как в трубопроводе закрытой оросительной сети 6 установится требуемое давление, бортовой компьютер 33 подает управляющий сигнал для открытия электрической задвижки 9 и вода, проходя через фильтр 8 и регулятор давления 7, поступает в полость трубопровода 2, и разбрызгивается с помощью дождевальных насадок 3 по поверхности орошаемого участка. Дождевальная машина 1 осуществляет полив в движении по кругу, для чего при помощи самоходных тележек 22, оснащенных электроприводом 23, происходит перемещение пролетов 20 с водопроводом 2 и дождевальными насадками 3 вокруг неподвижной опоры 4. Процесс полива может осуществляться в один или более проходов (оборотов) дождевальной машины 1, при этом выдаваемая за проход поливная норма не должна превышать эрозионно-допустимых норм.
После подачи напряжения в силовую сеть начинает мигать сигнальный фонарь 14, предупреждающий о нахождении дождевальной машины 1 в рабочем состоянии.
Размещение бортового компьютера 33, оснащенного приемником сигналов GPS/ГЛОНАСС 35, на крайней тележке 22 позволяет определять азимут трубопровода 2 машины 1 в режиме реального времени и посредством передачи данных о ходе процесса полива по сети Интернет осуществлять дистанционный мониторинг за работой оросительного комплекса.
Энергообеспечение оросительного комплекса осуществлено за счет электроэнергии вырабатываемой солнечными батареями 26. При этом солнечные батареи 26, благодаря их размещению в одной горизонтальной плоскости на каждом пролете 20, обладают одинаковым потенциалом для выработки электроэнергии вне зависимости от положения трубопровода 2 относительно солнца. При снижении уровня генерации электроэнергии солнечными батареями 26 ниже требуемого, контролер 28 переключает электропитание дождевальной машины на основную аккумуляторную батарею 30. При полном разряде основной аккумуляторной батареи 30 контролер 28 переводит дождевальную машину 1 на электропитание от резервной аккумуляторной батареи 31, одновременно с этим основная аккумуляторная батарея переключается контроллером 28 в режим подзарядки от солнечных батарей 26. Таким образом, использование одной или нескольких резервных аккумуляторных батарей позволяет увеличить время безостановочной работы машины 1, а также, не прекращая ее работы, производить заряд основной батареи 30.
По окончанию полива бортовой компьютер 33 подает управляющий сигнал для закрытия электрической задвижки 9, а затем, с использованием модема 34, передает по сети Интернет команду для остановки насосной станции. После чего контроллер 28 отключает питание силовой сети.
По истечению определенного времени после полива датчики влажности почвы 25 автоматически погружаются на необходимую глубину. Измерение влажности почвы производится в межполивной период, когда машина 1 находится в простое. При необходимости можно производить измерения влажности почвы на разных глубинах плодородного слоя за счет изменения глубины погружения датчиков влажности почвы 25.
С помощью дождемера 19, входящего в состав метеостанции 15, регистрируется объем и давность атмосферных осадков.
На основании анализа данных, поступивших от датчиков влажности почвы 25 и дождемера 19, бортовой компьютер 33 принимает решение о необходимости корректировки поливных норм для следующего полива, либо об изменении графика поливов. Например, если перед поливом влажность почвы находиться на достаточно высоком уровне, то бортовой компьютер 33 принимает решение о переносе полива на более позднее время, или если недавно прошли обильные атмосферные осадки, то компьютер 33 с учетом их объема корректирует поливную норму для последующего полива.
На основании данных получаемых от остальных датчиков метеостанции 15 – термометра 16, гигрометра 17 (влажность воздуха) и анеморумбометра 18 (скорость ветра) определяются потери искусственного дождя на испарение и снос дождевого облака ветром, данные потери компенсируются бортовым компьютером 33 корректировкой выдаваемой поливной нормой в большую сторону.
В зависимости от требуемой нормы полива и с учетом эрозионно-допустимых поливных норм бортовым компьютером 33 определяется число проходов за полив и рассчитывается требуемая для данных условий скорость передвижения дождевальной машины 1 по участку.
Установленный на неподвижной опоре 4 щит управления 13 служит для перевода машины 1 на ручное управление и устранения аварийных ситуаций.
Для использования электроэнергии вырабатываемой солнечными батареями 26 в период межсезонья или во время простоя машины 1 на неподвижной опоре 4 установлен электрический соединитель 36. Установка дополнительного электрического соединителя 36 на крайней тележке 22, в тех же целях, позволяет за счет разворота машины 1 в нужном направлении сократить расстояние до потребителя электроэнергии.
Предлагаемое изобретение позволит повысить уровень автоматизации и автономности роботизированного оросительного комплекса, обеспечит экономное расходование энергетических и водных ресурсов, а также повысит эффективность электропитания дождевальной машины от солнечных батарей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрифицированная дождевальная машина кругового действия | 2016 |
|
RU2646909C1 |
| Мелиоративный комплекс многоцелевого назначения | 2020 |
|
RU2745569C1 |
| МНОГООПОРНАЯ ДОЖДЕВАЛЬНАЯ МАШИНА ДЛЯ ПРЕЦИЗИОННОГО ОРОШЕНИЯ | 2016 |
|
RU2631896C2 |
| Способ определения потерь воды на испарение в воздухе при дождевании | 2017 |
|
RU2670454C1 |
| Многосекционная дождевальная машина кругового действия с интеллектуальным модулем | 2020 |
|
RU2755688C2 |
| ЭЛЕКТРИФИЦИРОВАННАЯ ДОЖДЕВАЛЬНАЯ МАШИНА | 2020 |
|
RU2754274C1 |
| Дождевальная машина | 2021 |
|
RU2768040C1 |
| АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2007 |
|
RU2354110C1 |
| ДОЖДЕВАЛЬНАЯ МАШИНА | 2012 |
|
RU2497348C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОТЕРЬ ВОДЫ НА ИСПАРЕНИЕ В ВОЗДУХЕ ПРИ ДОЖДЕВАНИИ ПРЕИМУЩЕСТВЕННО ПОДЗЕМНЫМИ ВОДАМИ | 2001 |
|
RU2206978C2 |
Изобретение относится к области сельского хозяйства и может быть использовано для автоматизированного орошения сельскохозяйственных культур с помощью электрифицированных дождевальных машин кругового действия. Роботизированный оросительный комплекс содержит трубопровод закрытой оросительной сети (6) с управляемой электрической задвижкой и электрифицированную дождевальную машину (1) кругового действия, содержащую неподвижную опору (4), шарнирно сочлененные друг с другом пролеты, представляющие собой шпренгельную ферму (21) с водопроводящим трубопроводом (2), один конец которой размещен на самоходной тележке (22) с электроприводом, солнечные батареи (26), инвертор, аккумуляторные батареи, дождевальные насадки (3). Солнечные батареи (26) при помощи кронштейнов закреплены на водопроводящем трубопроводе (2) каждого пролета. Солнечные батареи размещены над трубопроводом (2) и расположены в одной горизонтальной плоскости. Также солнечные батареи объединены по последовательно-параллельной схеме в единую цепь, которая соединена через контроллер (28) с трехфазным инвертором и с основной и резервными аккумуляторными батареями, размещенными в шкафу (32), установленном на фундаменте рядом с неподвижной опорой (4), которая в свою очередь дополнительно оснащена метеостанцией, содержащей термометр, гигрометр, анеморумбометр и дождемер, служащий для регистрации количества естественных атмосферных осадков. Самоходные тележки (22) оснащены датчиками влажности почвы, которые установлены с возможностью принудительного заглубления на различную глубину плодородного слоя и извлечения их перед началом движения машины (1). Машина оснащена бортовым компьютером (33), установленным в верхней части крайней тележки (22) и оснащенным модемом (34) с резервным каналом связи, обеспечивающим связь с сетью Интернет по радиоканалу. Также бортовой компьютер (33) снабжен приемником GPS/ГЛОНАСС (35) для определения азимута трубопровода (2) машины (1) в режиме реального времени. Для использования электроэнергии, вырабатываемой во время простоя машины (1), на неподвижной опоре (4) дополнительно установлен электрический соединитель. Обеспечивается повышение уровня автоматизации и автономности оросительного комплекса, экономное расходование энергетических и водных ресурсов за счет автоматической корректировки поливных норм и графика полива в зависимости от погодных условий, влажности почвы, объема и давности атмосферных осадков, а также повышение эффективности электропитания дождевальной машины от солнечных батарей. 1 з.п. ф-лы, 9 ил.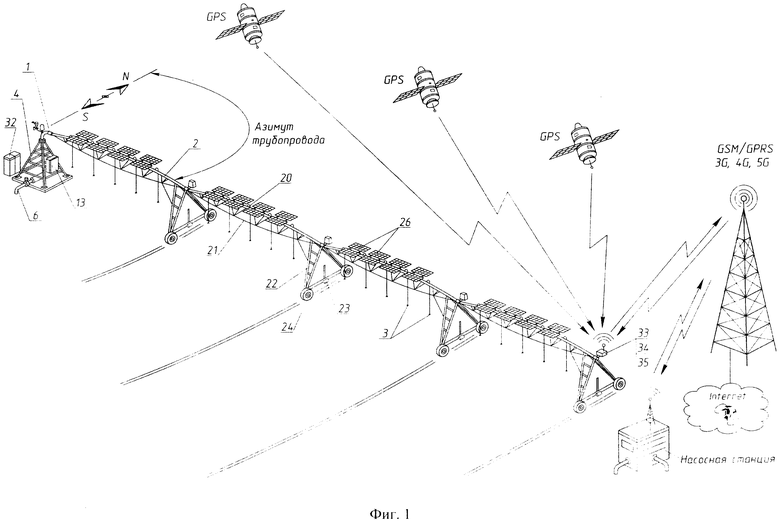
1. Роботизированный оросительный комплекс, включающий трубопровод закрытой оросительной сети с управляемой электрической задвижкой и электрифицированную дождевальную машину кругового действия, содержащую неподвижную опору, шарнирно сочлененные друг с другом пролеты, представляющие собой шпренгельную ферму с водопроводящим трубопроводом, один конец которой размещен на самоходной тележке с электроприводом, солнечные батареи, инвертор, аккумуляторные батареи, дождевальные насадки, отличающийся тем, что солнечные батареи при помощи кронштейнов закреплены на водопроводящем трубопроводе каждого пролета, при этом солнечные батареи размещены над трубопроводом и расположены в одной горизонтальной плоскости, также солнечные батареи объединены по последовательно-параллельной схеме в единую цепь, которая соединена через контроллер с трехфазным инвертором и с основной и резервными аккумуляторными батареями, размещенными в шкафу, установленном на фундаменте рядом с неподвижной опорой, которая в свою очередь дополнительно оснащена метеостанцией, содержащей термометр, гигрометр, анеморумбометр и дождемер, служащий для регистрации количества естественных атмосферных осадков, кроме того, самоходные тележки оснащены датчиками влажности почвы, которые установлены с возможностью принудительного заглубления на различную глубину плодородного слоя и извлечения их перед началом движения машины, для обеспечения автономного управления и корректировки поливных норм и графика поливов на основе обработки данных, получаемых от датчиков влажности почвы и метеостанции, машина оснащена бортовым компьютером, установленным в верхней части крайней тележки и оснащенным модемом с резервным каналом связи, обеспечивающим связь с сетью Интернет по радиоканалу, также бортовой компьютер снабжен приемником GPS/ГЛОНАСС для определения азимута трубопровода машины в режиме реального времени, кроме того, для использования электроэнергии, вырабатываемой во время простоя машины, на неподвижной опоре дополнительно установлен электрический соединитель.
2. Роботизированный оросительный комплекс по п. 1, отличающийся тем, что на крайней тележке дополнительно установлен электрический соединитель, обеспечивающий возможность использования электроэнергии, вырабатываемой во время простоя машины.
| Электрифицированная дождевальная машина кругового действия | 2016 |
|
RU2646909C1 |
| 0 |
|
SU189495A1 | |
| Оросительный комплекс | 1983 |
|
SU1132867A1 |
| CN 103404407 A, 27.11.2013. | |||

