ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ, И УРОВЕНЬ ТЕХНИКИ
Данное изобретение относится к функциональному устройству с соединяемыми друг с другом модулями для применения в сфере образования.
Что касается известного уровня техники, следует отметить, что в настоящее время в продаже имеются малогабаритные роботы, которые, как правило, представляют собой конфигурацию в виде шарнирной руки и которые предназначены для использования в исследовательской деятельности, в области дидактики и образования, а также для хобби.
Вышеупомянутые роботы отличаются не только небольшими размерами, но и конструкцией, состоящей из соединяемых друг с другом модулей, что позволяет даже неквалифицированным операторам самостоятельно конфигурировать этих роботов и устанавливать их.
В области робототехники модульные конструкции для роботов в любом случае широко известны уже в течение некоторого времени, что следует из документов уровня техники US 5428713, US 5293107.
Документ US 5293107 относится к шарнирной руке, содержащей ряд конструктивных элементов, шарнирно соединенных друг с другом с помощью шарниров с приводом. Данные шарниры представляют собой независимые модули с интегрированными в них поворотным электромеханическим приводом и блоком для питания и управления данным приводом. В частности, каждый шарнир содержит корпус статора, оснащенный рядом обмоток, и корпус ротора, имеющий ряд соответствующих магнитов. Кроме того, на этих корпусах установлены соответствующие зубчатые колеса, предназначенные для образования узла планетарного редуктора. Корпуса ротора и статора этого шарнира прикреплены к другим конструктивным элементам робота с помощью болтов.
Также, документ US 5428713 относится к модульной руке робота, которая, однако, состоит из ряда одинаковых модулей. В этом случае каждый модуль содержит двигатель, оснащенный зубчатым редуктором, блок управления, коаксиальный с двигателем и непосредственно соединенный с ним, неподвижный вал, проходящий из блока управления наружу так, чтобы совместно использовать ось вращения двигателя, вращающийся вал, выходящий из двигателя наружу, чтобы совместно использовать ось вращения двигателя, L-образный держатель, имеющий первый конец, соединенный с неподвижным валом, и второй конец, проходящий параллельно оси вращения двигателя в направлении подвижного вала, и еще один L-образный держатель, имеющий один конец, соединенный с подвижным валом, и еще один конец, проходящий параллельно оси вращения двигателя в направлении неподвижного вала.
Однако результаты использования модульных конфигураций роботов, доступных в настоящее время, в образовательных целях, оказались далеко неудовлетворительными.
ЗАДАЧА ИЗОБРЕТЕНИЯ
В связи с этим, задачей настоящего изобретения является создание функционального устройства для образовательных целей, в конструкции которого имеются соединяемые друг с другом модули, что дает этому устройству ряд преимуществ в соответствии с его конкретной целью использования, таких как упрощение конструкции, легкость и быстрота сборки, а также множество вариантов использования.
В частности, настоящее изобретение относится к функциональному устройству, имеющему признаки п. 1 формулы изобретения.
Формула изобретения является неотъемлемой частью технической идеи, предлагаемой здесь согласно изобретению.
Как будет подробно описано ниже, описанное здесь функциональное устройство предназначено для нескольких конфигураций использования и может быть собрано и разобрано весьма просто, быстро и безопасно.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ И ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Дополнительные характеристики и преимущества изобретения станут очевидными из следующего ниже описания со ссылками на прилагаемые чертежи, которые даны лишь в качестве неограничивающего примера. На чертежах изображено следующее:
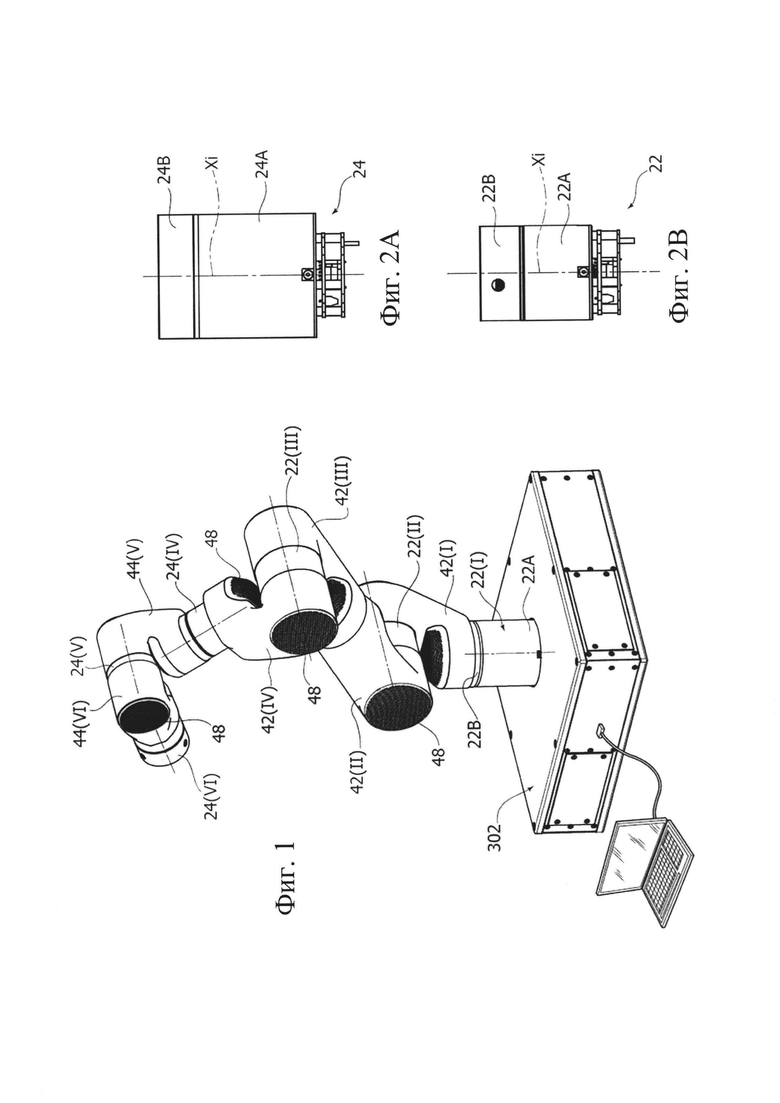
на фиг. 1 показан вид спереди в аксонометрии предпочтительного варианта осуществления описанного здесь устройства, собранного в конфигурации руки робота;
на фиг. 2а и 2b показаны виды спереди каждого из двух шарниров, используемых в варианте осуществления описанного здесь устройства;
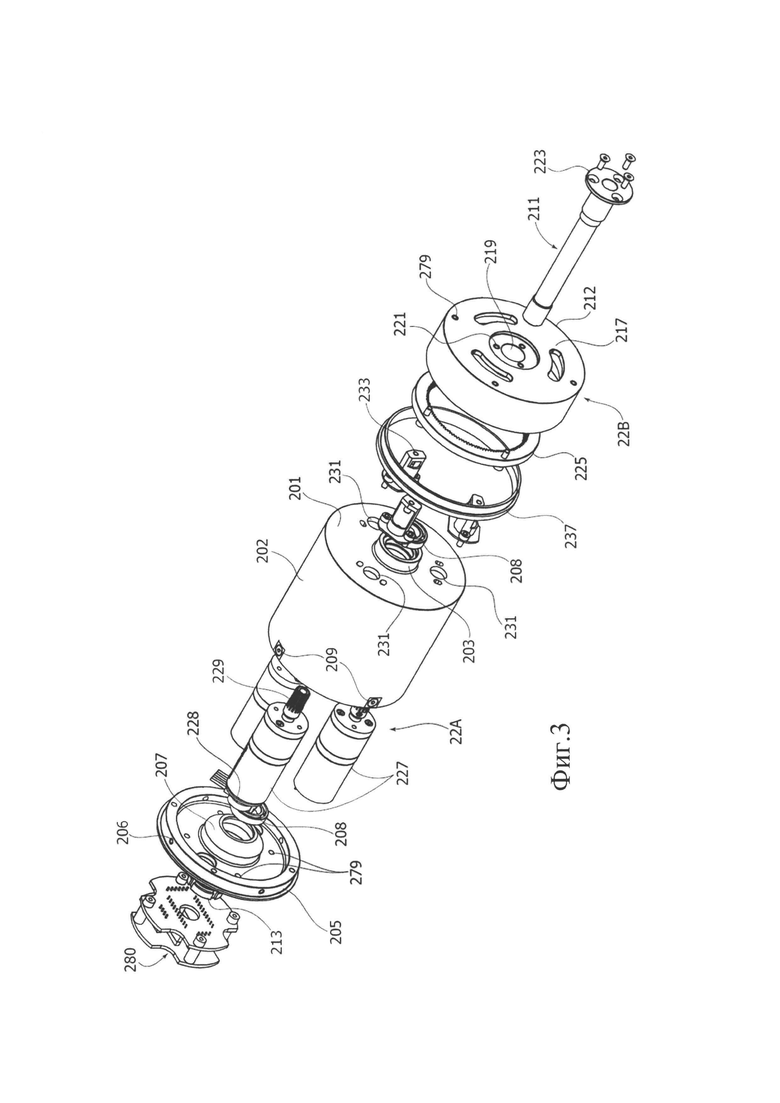
на фиг. 3 показан вид в аксонометрии с покомпонентным разделением деталей шарнира с фиг. 2b;
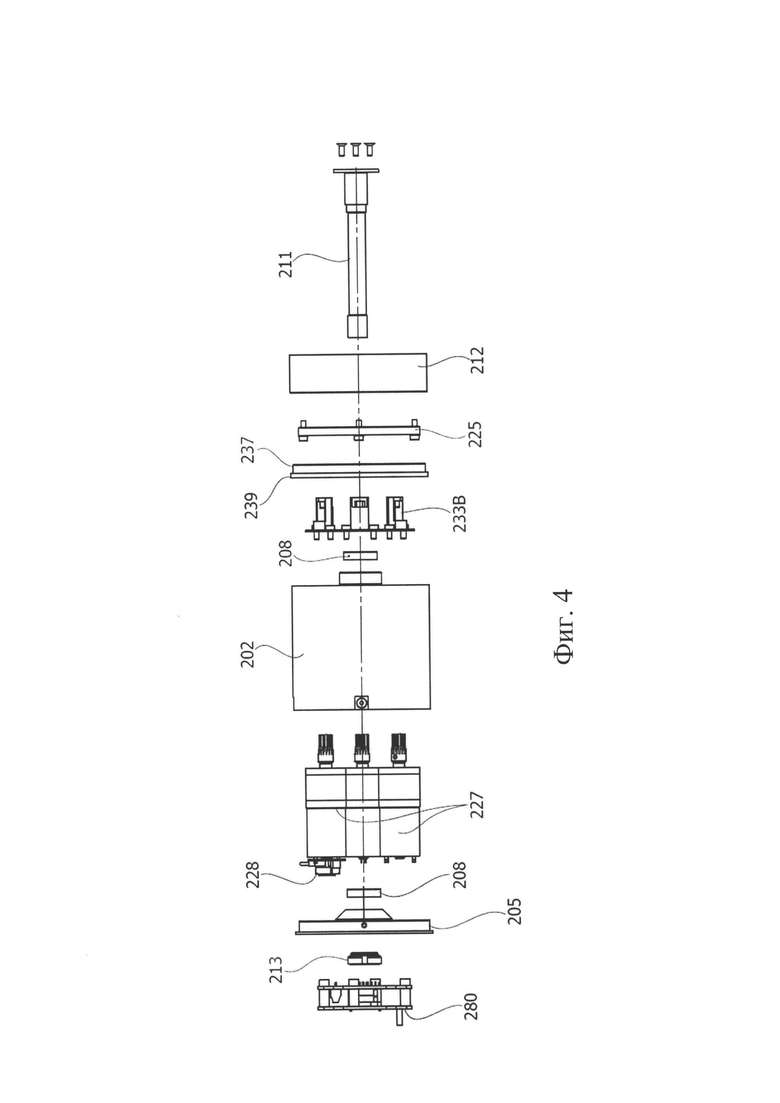
на фиг. 4 показан вид сбоку с покомпонентным разделением деталей с фиг. 3;
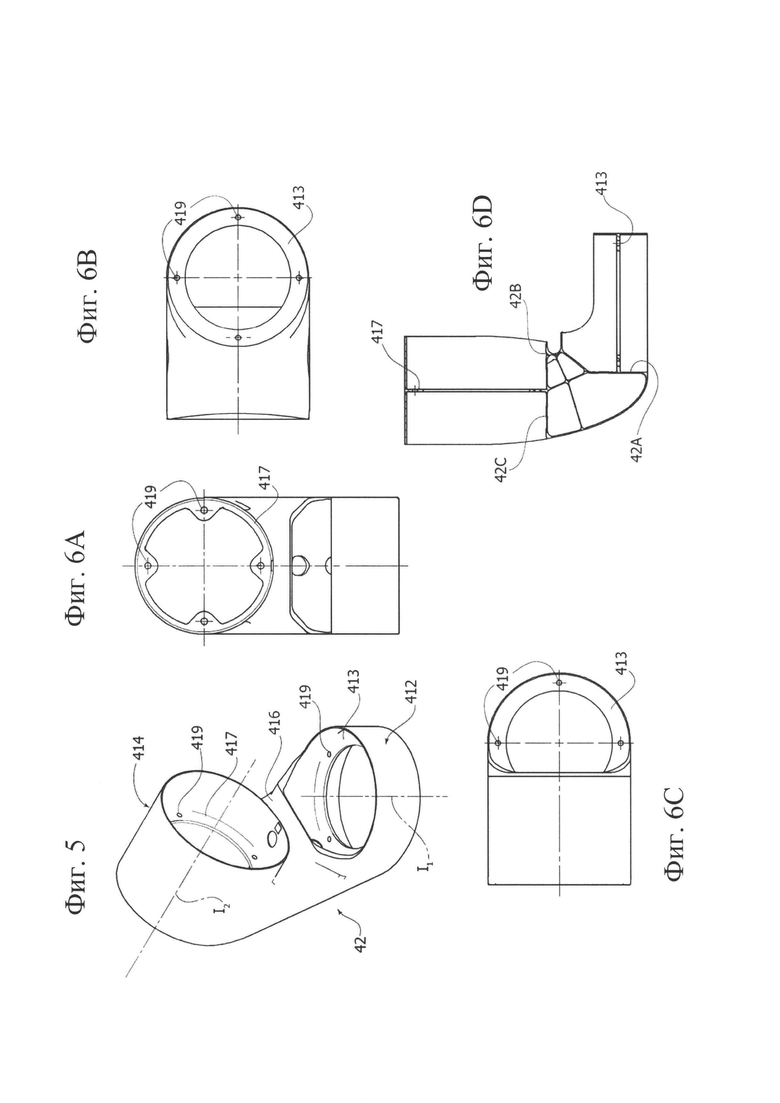
на фиг. 5 показан вид в аксонометрии опорного тела, используемого в варианте осуществления описанного здесь устройства;
на фиг. 6a-6d показана деталь с фиг. 5 в виде спереди (фиг. 6а), в виде снизу (фиг. 6b), в виде сверху (фиг. 6с) и в виде в поперечном разрезе (фиг. 6d);
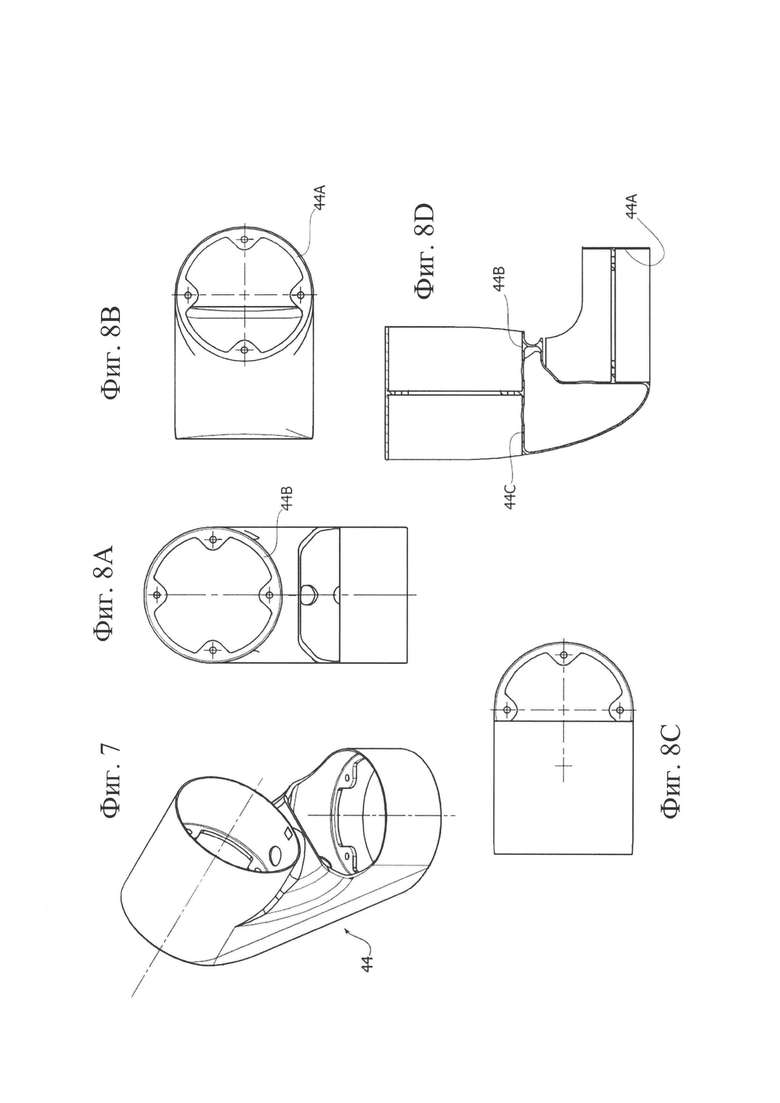
на фиг. 7 показан вид в аксонометрии дополнительного опорного тела, используемого в варианте осуществления описанного здесь устройства;
на фиг. 8a-8d показана деталь с фиг. 7 в виде спереди (фиг. 8а), в виде снизу (фиг. 8b), в виде сверху (фиг. 8с) и в виде в поперечном разрезе (фиг. 8d);
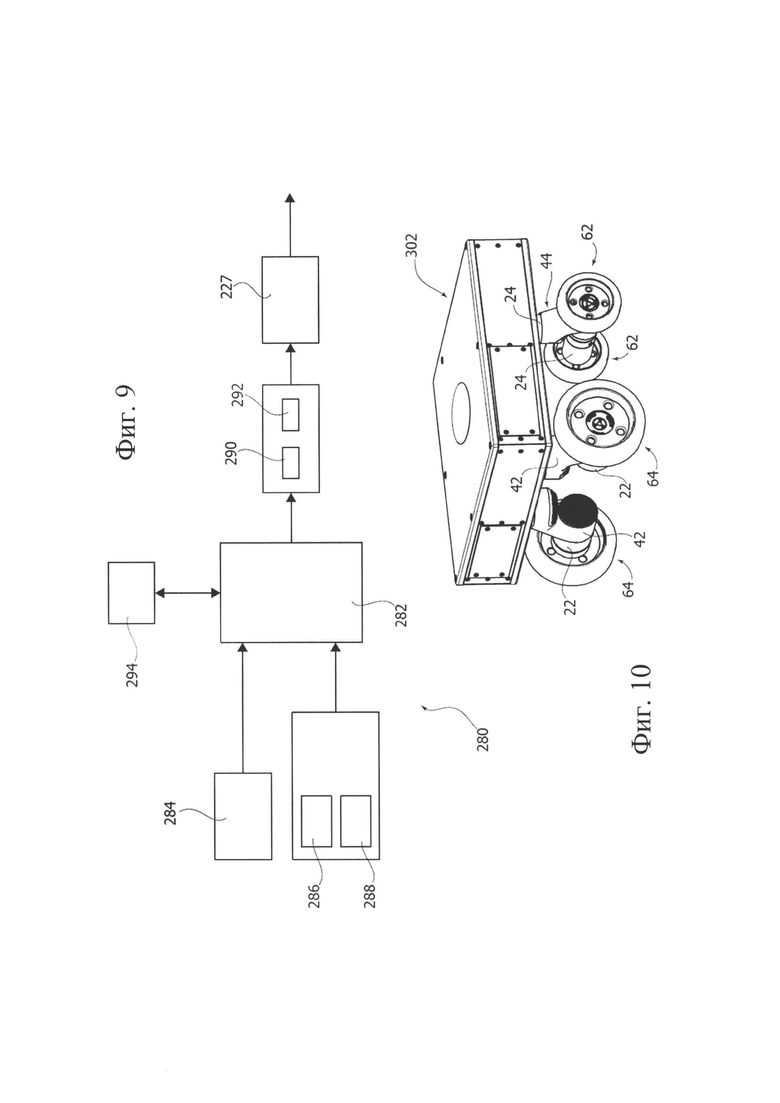
на фиг. 9 показана блок-схема одного типа блока для управления и питания, предусмотренного в описанном здесь устройстве;
на фиг. 10 показано описанное здесь устройство в конфигурации самоходного транспортного средства.
В следующем ниже описании для полного понимания вариантов осуществления описаны различные конкретные детали. Эти варианты осуществления могут быть получены без одной или нескольких конкретных деталей или с помощью других способов, компонентов, материалов и т.д. В других случаях известные конструкции, материалы или операции не проиллюстрированы и подробно не описаны, чтобы различные аспекты варианта осуществления были более понятны.
Использованные в данном документе ссылки приведены лишь для удобства и не ограничивают область правовой охраны или объем вариантов осуществления изобретения.
Как сказано выше, описанное в данном документе устройство представляет собой функциональное устройство с соединяемыми друг с другом модулями, применяемое для образовательных целей. С учетом спецификации применения устройства подразумевается его использование не столько для выполнения устройством определенных операций, сколько для выполнения подготовительных этапов конструирования и программирования функционального устройства, выполняемых в основном с целью научить пользователя выполнять эти этапы и/или осуществлять связанные с ними эксперименты. Устройство может применяться, например, в школах или других сообществах людей, особенно заинтересованных в робототехнике.
На чертежах показан предпочтительный вариант осуществления указанного выше устройства. На фиг. 1 устройство собрано в конфигурации руки робота, тогда как на фиг. 10 оно собрано в конфигурации транспортного средства с программируемым управлением.
В целом следует отметить, что описанное здесь устройство состоит из ряда опорных тел и, кроме того, ряда шарниров с приводом, которыми опорные тела шарнирно соединены друг с другом.
В показанном варианте осуществления устройство содержит, в частности, шарниры 22 и 24 с приводом, шарнирно соединяющие друг с другом ряд опорных тел 42, 44. На фиг. 1, на которой устройство имеет конфигурацию руки робота, римская цифра в скобках в номере позиции каждого компонента указывает соответствующий порядковый номер в соответствующем ряду, то есть ссылкой 22 (II) обозначен второй шарнир с приводом из ряда шарниров, аналогично ссылкой 42 (II) обозначено второе опорное тело из ряда опорных тел.
Шарниры с приводом представляют собой узлы для независимого приведения во вращательное движение вокруг соответствующей оси Xi вращения. В частности, как будет показано ниже, каждый шарнир содержит один или более двигателей и модуль для питания и управления двигателями.
В соответствии с важной характеристикой описанного здесь устройства, его шарниры имеют первую неподвижную цилиндрическую часть, которая внутри содержит вышеупомянутые двигатели шарнира, и вторую цилиндрическую часть, выполненную с возможностью вращения посредством данных двигателей. В то же время каждое из опорных тел образует первое гнездо и второе гнездо, которые в каждом случае имеют цилиндрическую форму и предназначены для размещения и закрепления в них независимо либо неподвижной цилиндрической части, либо подвижной цилиндрической части шарниров с приводом.
В различных предпочтительных вариантах осуществления, как показано на чертежах, опорные тела имеют, в частности, по существу L-образный профиль поперечного сечения, чтобы расположить два цилиндрических гнезда так, чтобы соответствующие оси были перпендикулярны друг другу. Кроме того, в различных предпочтительных вариантах, как и в показанном варианте, каждое опорное тело на по меньшей мере одной из своих ортогональных сторон имеет два противоположных коаксиальных цилиндрических гнезда, чтобы в них можно было разместить, одновременно или отдельно, два шарнира с приводом в соответствии с двумя противоположными ориентациями.
Согласно показанному на чертежах варианту осуществления шарниры 22 и 24 имеют неподвижные цилиндрические части 22А, 24А и подвижные цилиндрические части 22В и 24В (фиг. 2А и 2В). Опорные тела 42 и 44 с одной стороны имеют соответствующие цилиндрические гнезда 42а и 44а, а с другой стороны - два противоположных цилиндрических гнезда 42В, 42С и 44В, 44С (фиг. 6D и 8D).
Шарниры 22 и 24 и, соответственно, опорные тела 42 и 44 отличаются друг от друга в основном их размерами, в частности, шарниры 22 и опорные тела 42 образуют более крупные компоненты, предназначенные для непосредственного соединения друг с другом, а шарниры 24 и опорные тела 44 аналогичным образом образуют более мелкие компоненты, соединяемые непосредственно друг с другом. Как показано ниже, вместо этого устройство может иметь переходные модули, например, для соединения друг с другом большого опорного тела 42 с небольшим шарниром 24, и наоборот.
Упомянутые компоненты можно собрать друг с другом, чтобы получить, например, руку робота с фиг. 1 или транспортное средство с фиг. 10. Как показано ниже, такая перестраиваемость следует из предусмотренной в этом устройстве возможности сборки друг с другом шарниров и опорных тел в соответствии с несколькими модальностями.
Очевидно, что благодаря этим базовым компонентам можно создать различные устройства, и в сущности возможности создания в основном зависят от количества имеющихся компонентов.
Вышеуказанные аспекты в любом случае станут понятными после детального изучения конструкции представленных ниже отдельных компонентов.
Что касается шарниров, см., в частности, более крупный шарнир 22, детально проиллюстрированный на фиг. 3 и 4.
В различных предпочтительных вариантах осуществления, как и в показанном варианте, неподвижная цилиндрическая часть 22А шарнира образована трубчатым контейнером 202, закрытым с одной стороны стенкой 201, в центральной части которой выполнен просверленный внешний цилиндрический патрубок 203. На противоположной стороне по отношению к стенке 201 цилиндрический контейнер 202 закрыт крышкой 205, оснащенной просверленным внутренним патрубком 207, имеющим общую центральную ось с контейнером 202. Крышка 205 прикреплена к контейнеру 22А с помощью фиксирующих элементов стандартного типа. В различных предпочтительных вариантах осуществления, как показано на чертежах, вдоль боковой кромки крышки 205 предусмотрено несколько резьбовых отверстий 206, а на концевой кромке контейнера 202 в соответствующих положениях также предусмотрены резьбовые отверстия 209, с которыми выровнены отверстия 206 при установке крышки 205 на контейнере 202. Таким образом, в этом состоянии указанные два компонента скреплены друг с другом с помощью винтов, входящих в упомянутые отверстия.
Шарнир содержит центральный полый вал 211, закрепленный с возможностью вращения благодаря взаимному расположению опорных элементов 208 на одной стороне вблизи его первого конца, возле патрубка 207 крышки 205, и на его противоположной стороне, вблизи его противоположного конца, возле патрубка 203 контейнера 22А.
Вал 211 выступает наружу через патрубок 207 своим резьбовым концом, входящим в зацепление с помощью кольцевой гайки 213, которая крепит опорный элемент 208 к наружной стенке патрубка 207.
Противоположный конец вала 211 предназначен для крепления к дополнительному цилиндрическому кожуху 212, образующему вторую цилиндрическую часть 22В шарнира. В частности, кожух 212 имеет цилиндрическую боковую стенку того же диаметра, что и стенка контейнера 202, и край отверстия, обращенный к контейнеру.
Кожух 212 имеет круглую нижнюю стенку 217, в которой выполнено центральное отверстие 219, через которое проходит вал 211. На внешней стороне стенки 217, выполненной вокруг центрального отверстия 219, имеется опущенное круглое гнездо 221, находящееся в зацеплении с фланцем 223, образованным на конце вала 211. Для скрепления друг с другом с помощью винтов фланец 223 и нижняя стенка гнезда 221 имеют соответствующие отверстия в соответствующих местах.
На внутренней стороне стенки 217 закреплено кольцо 225, имеющее внутренние зубья.
Внутри контейнера 202 расположено множество электродвигателей 227, на выходных валах которых установлены соответствующие шестерни 229, выступающие через отверстия 231 за стенку 201 для вхождения в зацепление с внутренними зубьями кольца 225. В различных предпочтительных вариантах осуществления двигатели 227 имеют встроенный модуль редуктора.
В различных предпочтительных вариантах осуществления, как и в показанном варианте, с каждым двигателем или мотор-редуктором 227 соединен держатель 233, установленный на внешней стороне стенки 201 и имеющий центральную часть, снабженную штифтом 233В, предназначенным для ввода в зацепление с возможностью вращения с концом шестерни 229, чтобы ограничить ее в осевом направлении. Этот способ монтажа штифта обеспечивает возможность уменьшения напряжений на валу двигателя/мотор-редуктора.
Держатель 233 дополнительно имеет две перфорированные боковые части, предназначенные для установки в положении, соответствующем отверстиям, выполненным в стенке 201. Напротив, в области тех же отверстий, но с внутренней стороны стенки, двигатели 227 имеют резьбовые отверстия, выполненные в их корпусе. Двигатели 227, держатели 233 и стенку 201 скрепляют друг с другом в процессе одной операции с помощью винтов, вставленных в отверстия боковых частей держателей 233 и, после прохождения сквозь стенку 201, доходящих до резьбовых отверстий, которые предусмотрены в корпусе двигателей. Как сказано выше, в этом состоянии центральные штифты 233В держателей 233 ограничивают шестерни 229 в осевом направлении.
Кожух 212, который, как было сказано, представляет собой подвижную цилиндрическую часть 22В шарнира, установлен с возможностью вращения вокруг оси Xi шарнира в результате движения системы, состоящей из двигателей 227, шестерней 229 и кольца 225. Кроме того, следует отметить, что между кожухом 212 и контейнером 202 установлен кольцевой элемент 237, изготовленный из пластика с низким коэффициентом трения и прикрепленный к торцевой кромке кожуха 212. Данный элемент имеет цилиндрическую часть 239, которая имеет предпочтительно по существу такой же диаметр, что и контейнер 202 и кожух 212, и которая образует скользящее соединение со стенкой 201 контейнера 202. Элемент 237 выполняет функцию отделения от внешней среды компонентов шарнира и, в то же время, функцию защиты от износа взаимодействующих друг с другом деталей кожуха 212 и контейнера 202.
На внешней стороне крышки 205 закреплен блок 280 питания и управления шарниром. В различных предпочтительных вариантах осуществления, как показано на чертежах, он состоит из одной или нескольких печатных плат, которые непосредственно закреплены на крышке 205, и на которых расположены различные электронные компоненты, непосредственно доступные снаружи.
На фиг. 9 этот блок показан на уровне функциональных блоков. Как показано на чертеже, блок содержит модуль 282 управления, датчик 284 движения (например, содержащий один или более акселерометров), один или более модулей связи, таких как модуль 286 беспроводной связи (например, использующий протоколы связи Wi-Fi или Bluetooth), проводной модуль 288 доступа к данным, контур управления двигателями, в частности, контур 290 управления на МОП-транзисторе (металл-оксид-полупроводник), предпочтительно содержащий Н-мост, и модуль 292 усилителя сигнала, возможно также являющийся частью контура управления.
В различных предпочтительных вариантах осуществления блок 280 дополнительно содержит небольшой дисплей 294 для отображения, для удобства оператора, знака, идентифицирующего отдельный шарнир из ряда шарниров, предусмотренных для конкретного применения. Например, что касается устройства, показанного на фиг. 1, дисплей, связанный со вторым шарниром 22 (II), может отбражать римскую цифру II. Эта информация содержится в модуле 282 управления.
Блок 280 управления каждого шарнира программируют независимо с конкретным протоколом.
Кроме того, в различных предпочтительных вариантах осуществления в каждом шарнире, связанном с по меньшей мере одним из двигателей 227, имеется устройство 228 кодирования (см. фиг. 4), выполненное с возможностью обмена сигналами с модулем 282 управления.
Предпочтительно описанное здесь функциональное устройство дополнительно содержит центральный блок 302 управления, с которым соединены блоки 280 различных шарниров, и который сконфигурирован для передачи сигналов управления блоками в данные блоки для координации различных шарниров, например, на основе сигналов, полученных от датчиков 284 и устройства 282 кодирования. Блок 302 может быть сконфигурирован для программирования с помощью персонального компьютера (см. фиг. 1). Кроме того, блок 302 может содержать блок батарей для питания различных шарниров. Электрическое и/или сигнальное соединение различных шарниров с центральным блоком 302 может быть получено посредством проводов, проходящих через различные шарниры в соответствующих полых валах 211.
Что касается опорных тел, рассмотрим опорное тело 42, показанное на фиг. 5 и 6А-D.
Данное тело имеет две трубчатые части 412 и 414 с круглым поперечным сечением и одинакового диаметра, которые ориентированы относительно друг друга так, что их соответствующие оси I1 и I2 перпендикулярны друг другу и в то же время находятся в одной и той же плоскости. Эти части соединены друг с другом вогнутой соединительной поверхностью 416, внутри которой имеется ряд ребер, предназначенных для упрочнения конструкции опорного тела. На своем по существу центральном участке две части 414 и 412 имеют соответствующий внутренний кольцевой фланец 413 и 417.
Как показано на фиг. 6D, фланец 413 вместе с расположенным ниже участком части 412 образует вышеупомянутое цилиндрическое гнездо 42А. С другой стороны, внутренний фланец 417 делит трубчатую часть 414 на две по существу равные части, образуя вместе с ними два вышеупомянутых цилиндрических гнезда 42В и 42С, которые, как видно на данном чертеже, обращены в противоположных направлениях.
Каждое из гнезд 42А, 42В и 42С предназначено для получения формы, соответствующей каждой из цилиндрических частей 22А и 22В шарнира 22. В связи с этим следует отметить, что внутренний диаметр частей 414 и 412 выбран так, что вышеуказанные гнезда вмещают цилиндрические участки 22А и 22В в соответствии с условием, что наружные стенки этих частей установлены по существу вровень с внутренними стенками гнезд, по существу, по всему их периметру.
Следует отметить, что на фланцах 413 и 417 выполнено множество отверстий 419, расположенных так, что они могут быть выровнены с соответствующими отверстиями 279, в частности, резьбовыми отверстиями, выполненными как в неподвижной цилиндрической части шарнира, в частности в его крышке 205, так и в подвижной части шарнира, в частности, на его круглой стенке 217. Данные резьбовые отверстия и отверстия обеспечивают возможность прикрепления шарниров к гнездам опорного тела с помощью простых винтов.
В различных предпочтительных вариантах осуществления, как показано на чертежах, гнезда, не занятые шарнирами, могут быть закрыты крышками 48 исключительно для эстетических целей.
Как описано выше, шарниры 24 и опорные тела 44 имеют по существу одинаковую конструкцию и одинаковые модальности, которые были описаны выше со ссылкой на шарниры 22 и опорные тела 42.
Как видно на фиг. 1, показанная конфигурация руки робота получена благодаря использованию указанной возможности сборки шарниров и опорных тел в соответствии с множеством модальностей.
Действительно, что касается первого опорного тела, обозначенного номером позиции 42(I), в его гнезде 42А размещена подвижная часть 22В первого шарнира 22(I), а в его гнезде 42В - неподвижная часть второго шарнира 22(II).
Альтернативно, в гнезде 42В второго опорного тела 42(II) размещена подвижная часть второго шарнира 22(II), а в его гнезде 42А - разделительный элемент (не показан), предназначенный для жесткого крепления данного опорного тела к следующему опорному телу, то есть к третьему опорному телу 42(III).
В гнезде 42А третьего опорного тела 42(III) размешен только что упомянутый разделительный элемент, а в его гнезде 42В - неподвижная часть третьего шарнира 22(III).
В гнезде 42В четвертого опорного тела 42(IV) размещена подвижная часть третьего шарнира (22III), а в его гнезде 42А - переходник (не показан), в котором размещена неподвижная часть четвертого шарнира 24(IV).
В гнезде 44А пятого опорного тела 44(V) размещена подвижная часть четвертого шарнира 24(IV), а в его гнезде 44В - неподвижная часть пятого шарнира 24(IV).
Наконец, в гнезде 44А шестого опорного тела 44(VI) размещена подвижная часть пятого шарнира 24(V), а в его гнезде 44С - неподвижная часть шестого шарнира 24(VI).
Что касается конфигурации, показанной на фиг. 10, программируемое транспортное средство, изображенное на этом чертеже, содержит раму, образованную тем же центральным блоком 302 с фиг. 1, передний узел 62 рулевого колеса и два узла 64 заднего колеса, состоящие из различных комбинаций шарниров и опорных тел.
В частности, передний узел 62 образован опорным телом 44, внутри трех гнезд 44А, 44В и 44С которого размещены неподвижные части 24А такого же числа шарниров 24. Шарниры 24, размещенные в гнездах 44В и 44С, соединены своими подвижными частями 24В со ступицами соответствующих колес. Альтернативно, шарнир 24, размещенный в гнезде 44А, соединен своей подвижной частью 24В с центральным блоком 382. Первые два шарнира 24 работают как элементы двигателя, тогда как третий шарнир выполняет функцию управления.
С другой стороны, узлы 64 задних колес в каждом случае состоят из опорного тела 42, соединенного своим гнездом 42А с рамой транспортного средства, и вмещающего в своем гнезде 42С неподвижную часть 22А шарнира 22. Альтернативно, подвижная часть 22В этого шарнира соединена со ступицей соответствующего колеса.
Следует отметить, что использование центрального блока 302 как части конструкции этого транспортного средства позволяет обойтись без применения проводов, что облегчает движение самого транспортного средства.
Опорные тела и кожухи шарниров могут быть изготовлены из металла, например, из алюминия, или из полимера, предпочтительно из полимера, подходящего для литья под давлением различных тел, например, из полиамида с наполнителем из стекловолокна.
В свете вышесказанного, преимущества описанного здесь устройства очевидны. С одной стороны, это устройство может принимать широкий спектр функциональных конфигураций, так что оно стимулирует интерес и способность пользователя к планированию и программированию. С другой стороны, компоненты предлагаемого устройства могут быть очень быстро собраны и разобраны, поскольку для этого достаточно всего нескольких винтов, но в то же время обеспечивают жесткое и надежное соединение благодаря описанной выше цилиндрической геометрии, характеризующей их крепежные части.
Конечно, без ущерба для принципа данного изобретения и, не выходя за рамки объема правовой охраны, определенного в прилагаемой формуле изобретения, могут быть применены детали конструкции и варианты осуществления изобретения, отличающиеся, в том числе значительно, от того, что было описано и проиллюстрировано здесь исключительно в качестве примера.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕТРОУСТАНОВКА С ВЕРТИКАЛЬНОЙ ОСЬЮ | 2013 |
|
RU2652262C2 |
| ТОРМОЗНОЕ УСТРОЙСТВО ВЕЛОСИПЕДА | 1999 |
|
RU2223194C2 |
| УЛИТОЧНЫЙ НАПРАВЛЯЮЩИЙ АППАРАТ И СООТВЕТСТВУЮЩАЯ ТУРБИНА | 2009 |
|
RU2470161C2 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ТЕКУЧЕЙ СРЕДЫ НА ФАЗЫ С РАЗНЫМИ ПЛОТНОСТЯМИ (ВАРИАНТЫ) | 2010 |
|
RU2599759C2 |
| УСТРОЙСТВО И УЗЕЛ ДЛЯ РАЗДЕЛЕНИЯ ЖИДКОСТИ НА ФАЗЫ С РАЗНЫМИ ПЛОТНОСТЯМИ | 2015 |
|
RU2598088C1 |
| ЗВЕНО МЕЖДУ ДВУМЯ МЕХАНИЧЕСКИМИ ЭЛЕМЕНТАМИ | 2004 |
|
RU2347925C2 |
| УЗЕЛ ДЛЯ РАЗДЕЛЕНИЯ ЖИДКОСТИ НА ФАЗЫ С РАЗНЫМИ ПЛОТНОСТЯМИ (ВАРИАНТЫ) | 2010 |
|
RU2610591C2 |
| УЗЕЛ И УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ТЕКУЧЕЙ СРЕДЫ НА ФАЗЫ С РАЗНЫМИ ПЛОТНОСТЯМИ (ВАРИАНТЫ) | 2015 |
|
RU2609805C2 |
| ДИСКРЕТНОЕ БУМАГОПОДАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2003 |
|
RU2286941C2 |
| СПОСОБ И УСТРОЙСТВО (ВАРИАНТЫ) ДЛЯ ЭЛЕКТРОЛИТИЧЕСКОЙ ПОЛИРОВКИ МЕЖСОЕДИНЕНИЙ В ПОЛУПРОВОДНИКОВЫХ УСТРОЙСТВАХ | 1999 |
|
RU2224329C2 |
Заявлено функциональное устройство, такое как робот, с соединяемыми друг с другом модулями для применения в сфере образования. Устройство содержит одно или более опорных тел (42, 44), один или более шарниров (22, 24) с приводом, причем каждый шарнир содержит один или более электрических двигателей (227), блок (280) для питания и управления двигателями, и первую, неподвижную цилиндрическую часть (22А, 24А), и вторую, подвижную цилиндрическую часть (22В, 24В), причем первая цилиндрическая часть содержит внутри себя один или более электрических двигателей. Каждое опорное тело образует первое цилиндрическое гнездо (42А, 44А) и второе цилиндрическое гнездо (42В, 44В), предназначенные для размещения и закрепления в них независимо либо первой цилиндрической части (22А, 24А), либо второй цилиндрической части (22В, 24В) шарниров. Предложенное устройство может принимать широкий спектр функциональных конфигураций, так что оно стимулирует интерес и способность пользователя к планированию и программированию, а компоненты устройства могут быть очень быстро собраны и разобраны, поскольку для этого достаточно всего нескольких винтов, но в то же время обеспечивают жесткое и надежное соединение благодаря описанной выше цилиндрической геометрии, характеризующей их крепежные части. 12 з.п. ф-лы, 10 ил.
1. Функциональное устройство, такое как робот, содержащее:
- одно или более опорных тел (42, 44) и
- один или более шарниров (22, 24) с приводом, причем каждый шарнир содержит:
- один или более электрических двигателей (227),
- блок (280) для питания и управления указанными двигателями, и
- первую неподвижную цилиндрическую часть (22А, 24А) и вторую подвижную цилиндрическую часть (22В, 24В), причем указанная первая цилиндрическая часть содержит внутри себя указанный один или более электрических двигателей,
причем каждое опорное тело образует первое цилиндрическое гнездо (42А, 44А) и второе цилиндрическое гнездо (42В, 44В), предназначенные для размещения и закрепления в них независимо либо первой цилиндрической части (22А, 24А), либо второй цилиндрической части (22В, 24В).
2. Устройство по п. 1, в котором диаметры указанных цилиндрических гнезд (42А, 44А, 42В, 44В) указанного опорного тела и указанных цилиндрических частей (22А, 24А, 22В, 24В) указанного шарнира по существу равны, так что в указанных гнездах размещены части в соответствии с условием, что наружные стенки указанных частей установлены вровень с внутренними стенками указанных гнезд по всему их периметру.
3. Устройство по п. 1 или 2, в котором указанное опорное тело (42) содержит по меньшей мере одну трубчатую часть (412, 414), снабженную на внутренней части кольцевым фланцем (413, 417), образующим по меньшей мере одно из первых и вторых цилиндрических гнезд.
4. Устройство по п. 3, в котором на кольцевом фланце (413, 417) выполнен ряд отверстий (419), причем на указанных цилиндрических частях указанного шарнира выполнен ряд резьбовых отверстий (279), предназначенных для выравнивания с указанными отверстиями, выполненными на кольцевых фланцах, для закрепления указанного шарнира на опорном теле с помощью винтов.
5. Устройство по любому из пп. 1-4, в котором опорное тело (42, 44) имеет по существу L-образную форму, так что соответствующие оси (I1, I2) указанного первого гнезда и указанного второго гнезда расположены взаимно перпендикулярно относительно друг друга.
6. Устройство по любому из пп. 1-5, в котором опорное тело имеет два противоположных коаксиальных цилиндрических гнезда (42В, 42С, 44В, 44С) для обеспечения возможности размещения в них шарнира в соответствии с двумя противоположными ориентациями.
7. Устройство по любому из пп. 1-6, в котором указанные первая и вторая цилиндрические части указанного шарнира имеют соответствующие круглые торцевые стенки (205, 217), в которых выполнено одно или более резьбовых отверстий (279) для прикрепления указанного шарнира к указанному опорному телу с помощью винтов.
8. Устройство по любому из пп. 1-7, в котором указанный шарнир содержит цилиндрический контейнер (202), содержащий указанные электрические двигатели, закрытый крышкой (205) и образующий указанную первую цилиндрическую часть, и содержит цилиндрический полукожух (212), который обращен своим торцовым краем к указанному контейнеру (202) и образует указанную вторую цилиндрическую часть.
9. Устройство по п. 8, в котором электрические двигатели прикреплены к дну (201) контейнера с помощью винтов, проходящих через соответствующие отверстия, выполненные в указанном дне, и входящих в зацепление с резьбовыми отверстиями, выполненными в корпусе двигателей (217).
10. Устройство по п. 8 или 9, в котором на выходных валах указанных двигателей установлены соответствующие шестерни (229), расположенные вне указанного контейнера и, таким образом, находящиеся в указанном полукожухе, причем полукожух имеет внутренние зубья (225), находящиеся в зацеплении с указанными шестернями.
11. Устройство по п. 10, в котором с каждой шестерней связан держатель (233) по существу вогнутой формы, который прикреплен к указанному контейнеру и предназначен для ввода в зацепление с возможностью вращения с указанной шестерней (229) на стороне, противоположной двигателю, и для ограничения движения шестерни в осевом направлении с противодействием соскальзыванию указанной шестерни с указанного выходного вала.
12. Устройство по любому из пп. 8-11, в котором наружные цилиндрические стенки контейнера и полукожуха выровнены относительно друг друга.
13. Устройство по любому из пп. 1-12, в котором указанный блок питания и управления имеет дисплей для отображения знака, идентифицирующего шарнир с приводом из ряда предусмотренных шарниров.
| US 5355743 A, 18.10.1994 | |||
| Промышленный робот модульного типа | 1989 |
|
SU1734994A1 |
| US 6084373 A, 04.07.2000 | |||
| US 20160101518 A1, 14.04.2016 | |||
| УЗЕЛ ВЕДУЩЕЙ ШЕСТЕРНИ | 1998 |
|
RU2139463C1 |
| US 9375841 B1, 28.07.2016 | |||
| Устройство для перекрытия скважины | 1969 |
|
SU441397A1 |
| РЕДУКТОР ЧИСЛА ОБОРОТОВ С СИСТЕМОЙ ГИБКОГО СОЕДИНЕНИЯ МЕЖДУ САТЕЛЛИТНОЙ ОБОЙМОЙ И НЕПОДВИЖНЫМ КРОНШТЕЙНОМ | 2004 |
|
RU2332598C2 |

