Изобретение относится к машиностроению, в частности к конструкции промышлен- ных роботов, манипуляторы которых состоят из автономных приводных модулей.
Целью изобретения является расширение технологических возможностей путем увеличения степеней подвижностей.
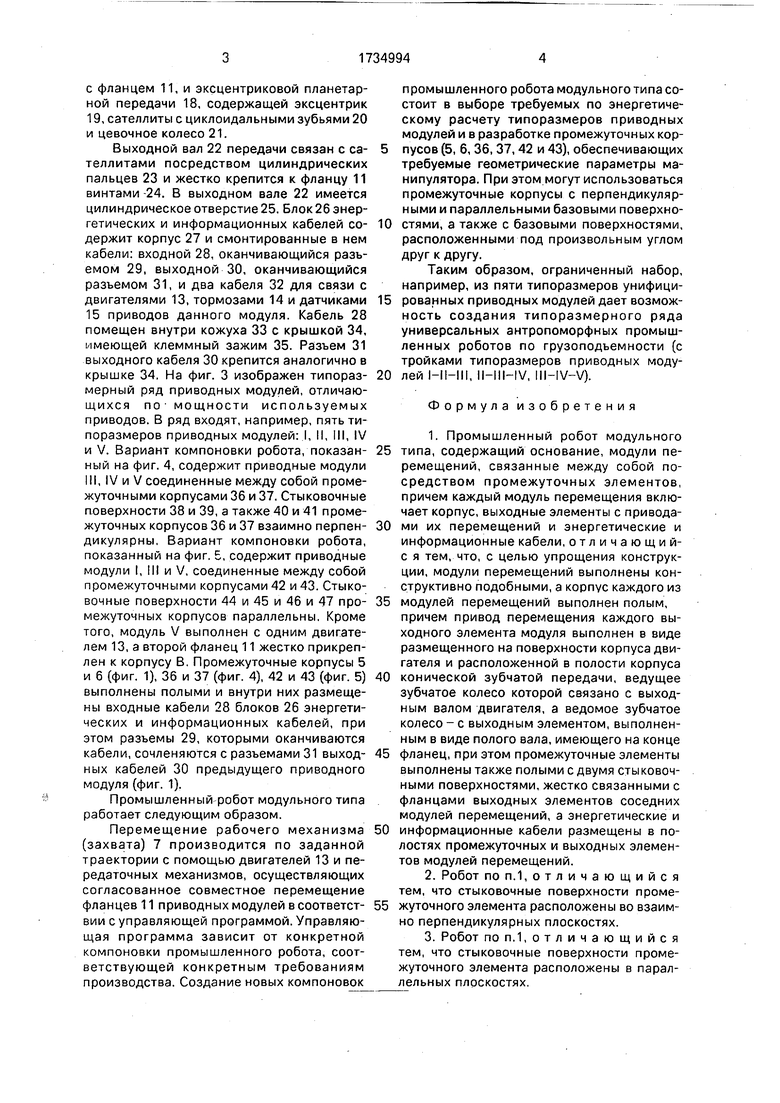
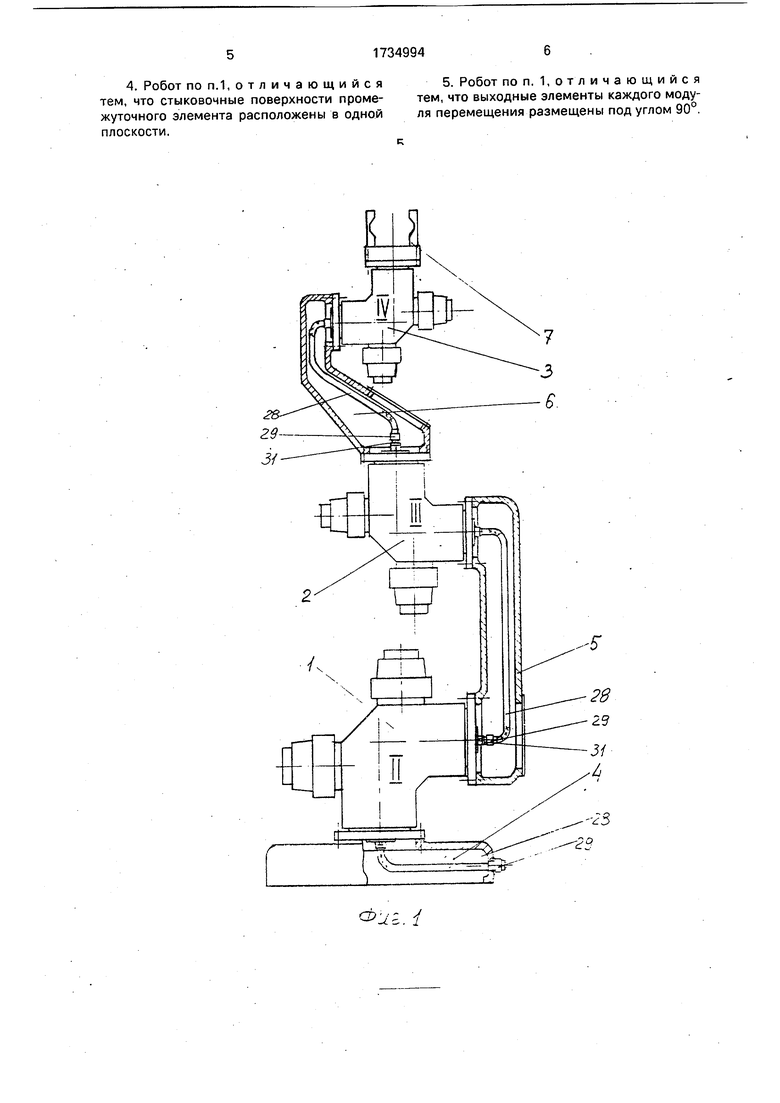
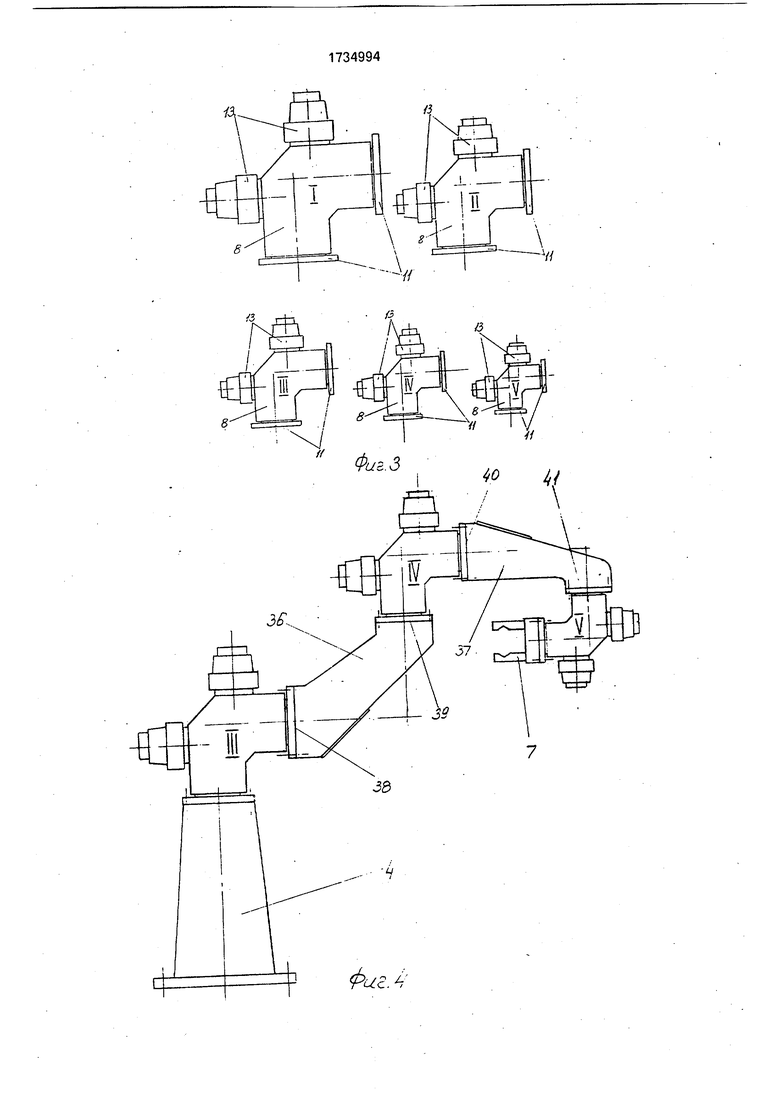
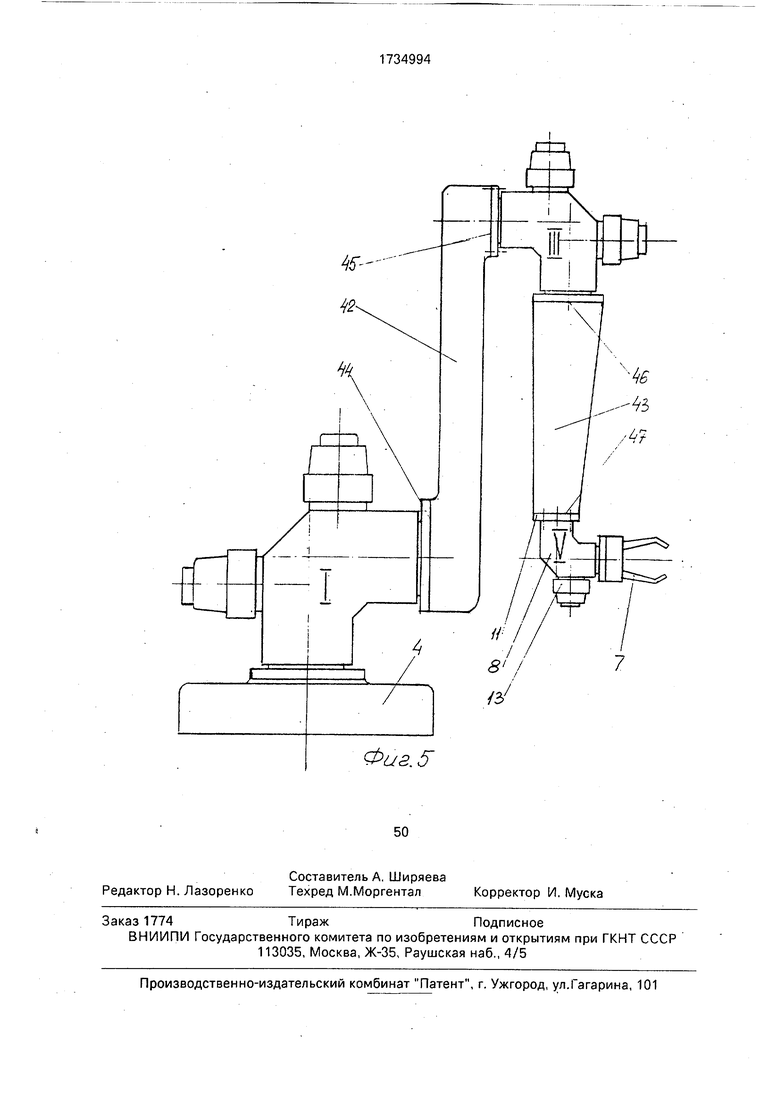
На фиг. 1 представлен промышленный робот, общий вид; на фиг. 2 - приводной модуль, разрез; на фиг. 3 - типоразмерный ряд приводных модулей; на фиг. 4 и 5 - различные компоновки промышленного робота.
Промышленный робот модульного типа содержит приводные модули 1-3 (фиг. 1), основание 4, промежуточные корпусы 5 и 6, рабочий механизм, например захват 7. Каждый из приводных модулей (фиг. 2) содержит корпус 8 с полостью 9 внутри и двумя цилиндрическими отверстиями 10, оси которых пересечены. В отверстиях 10 установлены с возможностью поворота выходные элементы в виде полых валов с фланцами 11, например, на шариковых подшипниках 12 с четырехточечным контактом. Привод фланцев 11 осуществляется от двигателей 13, укомплектованных, в общем случае, тормозами 14 и датчиками 15 обратной связи по положению и скорости. Связь двигателя 13 с фланцем 11 осуществляется с помощью конической зубчатой передачи, содержащей, например, коническое ведущее зубчатое колесо 16 и ведомое коническое зубчатое колесо 17, расположённое соосно
ы
4 Ю
ю
с фланцем 11, и эксцентриковой планетарной передачи 18, содержащей эксцентрик 19, сателлиты с циклоидальными зубьями 20 и цевочное колесо 21.
Выходной вал 22 передачи связан с сателлитами посредством цилиндрических пальцев 23 и жестко крепится к фланцу 11 винтами 24. В выходном вале 22 имеется цилиндрическое отверстие 25. Блок 26 энергетических и информационных кабелей содержит корпус 27 и смонтированные в нем кабели: входной 28, оканчивающийся разъемом 29, выходной 30, оканчивающийся разъемом 31, и два кабеля 32 для связи с двигателями 13, тормозами 14 и датчиками 15 приводов данного модуля. Кабель 28 помещен внутри кожуха 33 с крышкой 34, имеющей клеммный зажим 35. Разъем 31 выходного кабеля 30 крепится аналогично в крышке 34. На фиг. 3 изображен типораз- мерный ряд приводных модулей, отличающихся по мощности используемых приводов. В ряд входят, например, пять типоразмеров приводных модулей: I, II, III, IV и V. Вариант компоновки робота, показанный на фиг. 4, содержит приводные модули III, IV и V соединенные между собой промежуточными корпусами 36 и 37. Стыковочные поверхности 38 и 39, а также 40 и 41 промежуточных корпусов 36 и 37 взаимно перпендикулярны, Вариант компоновки робота, показанный на фиг. 5, содержит приводные модули I, III и V, соединенные между собой промежуточными корпусами 42 и 43. Стыковочные поверхности 44 и 45 и 46 и 47 промежуточных корпусов параллельны, Кроме того, модуль V выполнен с одним двигателем 13, а второй фланец 11 жестко прикреплен к корпусу В. Промежуточные корпусы 5 и 6 (фиг. 1), 36 и 37 (фиг. 4), 42 и 43 (фиг. 5) выполнены полыми и внутри них размещены входные кабели 28 блоков 26 энергетических и информационных кабелей, при этом разъемы 29, которыми оканчиваются кабели, сочленяются с разъемами 31 выходных кабелей 30 предыдущего приводного модуля (фиг. 1).
Промышленный робот модульного типа работает следующим образом.
Перемещение рабочего механизма (захвата) 7 производится по заданной траектории с помощью двигателей 13 и передаточных механизмов, осуществляющих согласованное совместное перемещение фланцев 11 приводных модулей в соответствии с управляющей программой. Управляющая программа зависит от конкретной компоновки промышленного робота, соответствующей конкретным требованиям производства. Создание новых компоновок
промышленного робота модульного типа состоит в выборе требуемых по энергетическому расчету типоразмеров приводных модулей и в разработке промежуточных корпусов (5, 6, 36, 37,42 и 43), обеспечивающих требуемые геометрические параметры манипулятора. При этом могут использоваться промежуточные корпусы с перпендикулярными и параллельными базовыми поверхностями, а также с базовыми поверхностями, расположенными под произвольным углом друг к другу.
Таким образом, ограниченный набор, например, из пяти типоразмеров унифицированных приводных модулей дает возможность создания типоразмерного ряда универсальных антропоморфных промышленных роботов по грузоподъемности (с тройками типоразмеров приводных модулей l-ll-lll, II-IIHV, III-IV-V).
Формула изобретения
1.Промышленный робот модульного типа, содержащий основание, модули перемещений, связанные между собой посредством промежуточных элементов, причем каждый модуль перемещения включает корпус, выходные элементы с приводами их перемещений и энергетические и информационные кабели, отличающий- с я тем, что, с целью упрощения конструкции, модули перемещений выполнены конструктивно подобными, а корпус каждого из
модулей перемещений выполнен полым, причем привод перемещения каждого выходного элемента модуля выполнен в виде размещенного на поверхности корпуса двигателя и расположенной в полости корпуса
конической зубчатой передачи, ведущее зубчатое колесо которой связано с выходным валом двигателя, а ведомое зубчатое колесо - с выходным элементом, выполненным в виде полого вала, имеющего на конце
фланец, при этом промежуточные элементы выполнены также полыми с двумя стыковочными поверхностями, жестко связанными с фланцами выходных элементов соседних модулей перемещений, а энергетические и
информационные кабели размещены в полостях промежуточных и выходных элементов модулей перемещений.
2.Робот по п.1, отличающийся тем, что стыковочные поверхности промежуточного элемента расположены во взаимно перпендикулярных плоскостях.
3.Робот поп.1,отличающийся тем, что стыковочные поверхности промежуточного элемента расположены в параллельных плоскостях
4. Робот по п. 1,отличающийся тем, что стыковочные поверхности промежуточного элемента расположены в одной плоскости.
5. Робот по п. 1,отличающийся тем, что выходные элементы каждого модуля перемещения размещены под углом 90°.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Исполнительный орган промышленного робота | 1978 |
|
SU766855A1 |
| ПЛАНЕТАРНЫЙ ВЫСОКОМОЩНЫЙ МИНИ-РЕДУКТОР | 2001 |
|
RU2222733C2 |
| Модуль манипулятора | 1987 |
|
SU1579769A1 |
| Манипулятор модульного типа | 1983 |
|
SU1252162A1 |
| Модульный манипулятор | 1980 |
|
SU952578A1 |
| ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ С УСТАНОВЛЕННЫМ НА НЕМ СЪЕМНЫМ ОБРАЗОМ УЗЛОМ ГЕНЕРАТОРА | 2007 |
|
RU2448259C2 |
Использование: автоматизация технологических процессов машиностроения. Сущность изобретения: промышленный робот модульного типа содержит конструктивно подобные модули перемещений, связанные между собой промежуточными элементами. Каждый модуль перемещений выполнен в виде полого корпуса, выходных элементов, являющихся полыми валами с фланцами на конце, и приводов перемещений этих выходных элементов, включающих двигатели, размещенные на корпусе, и конические зубчатые передачи, расположенные в полости корпуса. Промежуточные элементы выполнены полыми со стыковочными поверхностями, расположенными в перпендикулярных или параллельных плоскостях или в одной плоскости. Энергетические и информационные кабели размещены в полостях промежуточных элементов и полых валов выходных элементов. Выходные элементы каждого модуля пересекаются под углом 90°, 4 з.п.ф-лы, 5 ил.
5
& .{
Ъ-П
Фиг. I
Фиг.
7
.J
| Патент США № 4636138, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
