ОБЛАСТЬ ТЕХНИКИ
[001] Данное изобретение в целом относится к системам, устройствам, конструкциям и способам отображения виртуальной графики на индикаторе на лобовом стекле.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[002] Известные системы индикации на лобовом стекле (ИЛС), используемые в транспортных средствах, таких как автомобили и самолеты, предоставляют оператору транспортного средства генерируемую компьютером виртуальную графику, дополняющую визуальное сенсорное восприятие оператором реальных объектов, которые оператор может видеть в процессе эксплуатации транспортного средства. ИЛС-системы могут быть выполнены с возможностью генерирования виртуальной графики и проецирования виртуальной графики в виде изображений или текста на лобовое стекло, с тем чтобы оператор мог просматривать эту информацию, не опуская головы и не отвлекаясь от реальных объектов, которые можно видеть в процессе эксплуатации транспортного средства. Когда расстояние до реального объекта и воспринимаемое расстояние до элемента виртуальной графики, генерируемого ИЛС, не совпадают, это может причинять неудобство водителю, а также может приводить к дополнительной задержке, поскольку глазу человека потребуется некоторое время, чтобы менять фокус и совмещать разные расстояния каждый раз, когда водитель переводит взгляд на новый объект.
[003] В частности, в ИЛС-системах, проектируемых для самолетов, большинство представляющих интерес объектов могут находиться на расстоянии более 100 метров от самолета, поэтому можно предположить, что авиационная ИЛС, у которой фиксированное фокусное расстояние замкнуто на бесконечности, будет давать пилоту самолета удовлетворительные результаты.
[004] В случае с объектами, которые расположены на расстоянии 100 метров или более, глаз человека фокусируется на объекте, как будто он расположен бесконечно далеко, потому что лучи света, которые отражаются от такого объекта, по существу доходят до оператора как параллельные лучи света. Соответственно, генерируемая компьютером виртуальная графика известных ИЛС-систем для самолетов может отображаться для оператора так, чтобы казалось, будто она лежит в плоскости изображения, настроенной на бесконечность, чтобы она совпадала с фокальной плоскостью других объектов, видимых оператору.
[005] Дорожные транспортные средства, например, автомобили, представляют другие условия работы для ИЛС-систем, поскольку объекты, видимые оператору, зачастую находятся гораздо ближе, чем когда эти объекты наблюдают пилоты самолетов (например, ближе 100 метров). ИЛС-изображение, настроенное на бесконечность или какое-то другое произвольное расстояние, во многих сценариях может приводить к тому, что оператор будет менять фокус между ИЛС-генерируемой виртуальной графикой и связанным с ней реальным объектом из-за несоответствия между фокусными расстояниями (в отличие от большинства находящихся в воздухе самолетов). В известных ИЛС-системах, спроектированных для дорожных транспортных средств, может быть задана фиксированная фокальная плоскость от 7,5 метров до 20 метров, с тем чтобы она попадала в середину типичного фокусного диапазона. Фокальная плоскость ИЛС-системы может быть задана при изготовлении таким образом, чтобы она была приближена к типичным расстояниям до представляющих интерес объектов снаружи транспортного средства.
[006] Поскольку дорожные условия, в которых эксплуатируются дорожные транспортные средства, могут сильно отличаться друг от друга, например, это могут быть загруженные автострады, пригородные улицы или же дороги, проходящие по непересеченной местности, фокальная плоскость, выбранная изготовителем ИЛС, не обязательно будет оптимизированной для конкретных дорожных условий. Наложение генерируемой компьютером виртуальной графики на объект, связанный с другой фокальной плоскостью, может приводить к тому, что виртуальная графика будет не в фокусе для оператора или же будет путать оператора, если ему будет непонятно, какой объект связан с виртуальной графикой.
[007] Сохраняется потребность в усовершенствовании ИЛС-систем.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[008] На фиг. 1 показана иллюстративная система отображения для транспортного средства, выполненная с несколькими плоскостями изображения.
[009] На фиг. 2A показано иллюстративное устройство отображения, связанное с несколькими реальными объектами.
[0010] На фиг. 2B показано иллюстративное устройство отображения, показанное на фиг. 2A, причем генерируемая компьютером виртуальная графика отображается в нескольких фокальных плоскостях.
[0011] На фиг. 3A показано иллюстративное устройство отображения, причем генерируемая компьютером виртуальная графика отображается на наклонной плоскости изображения.
[0012] На фиг. 3B показано иллюстративное устройство отображения с обновленной плоскостью изображения.
[0013] На фиг. 4 показано упрощенное графическое представление иллюстративной проекционной системы, выполненной с возможностью отображения виртуальной графики в нескольких фокальных плоскостях изображения.
[0014] На фиг. 5 показана иллюстративная система отображения, выполненная с возможностью взаимодействия с бортовой операционной системой транспортного средства.
[0015] На фиг. 6 показана иллюстративная система отображения, выполненная с возможностью генерирования виртуальной графики на наклонной плоскости изображения.
[0016] На фиг. 7 показана иллюстративная система отображения, содержащая несколько расположенных одна над другой матриц изображения.
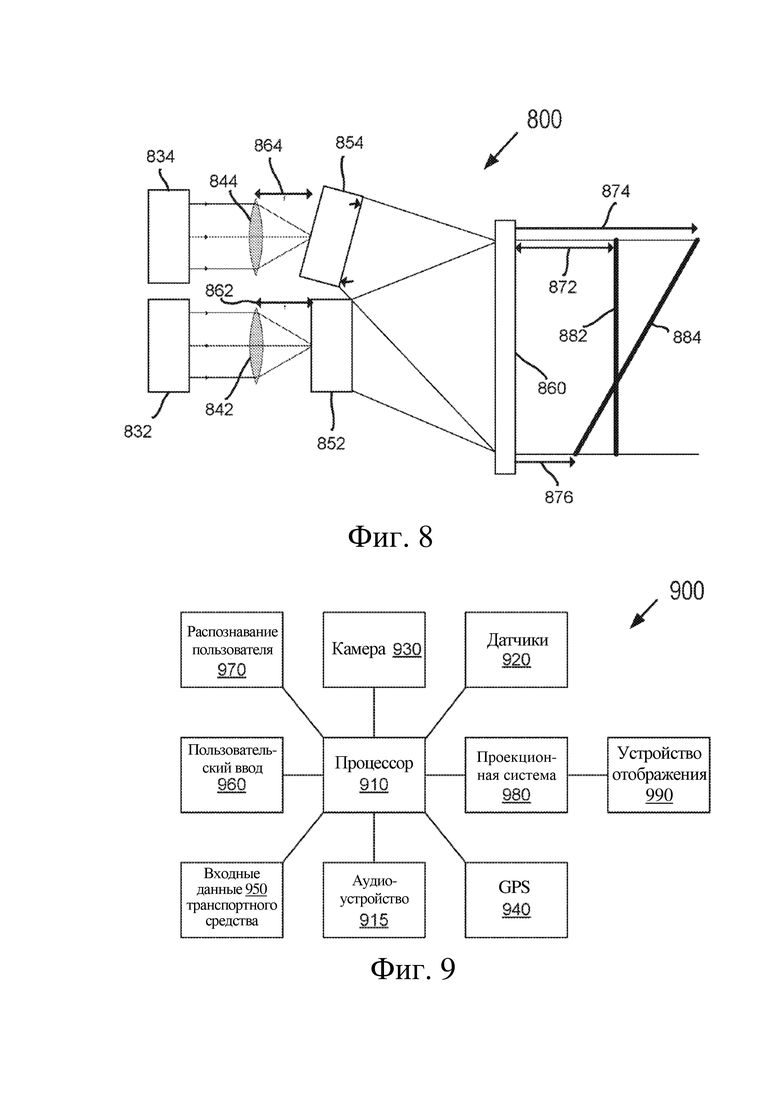
[0017] На фиг. 8 показана иллюстративная система отображения, содержащая несколько матриц изображения.
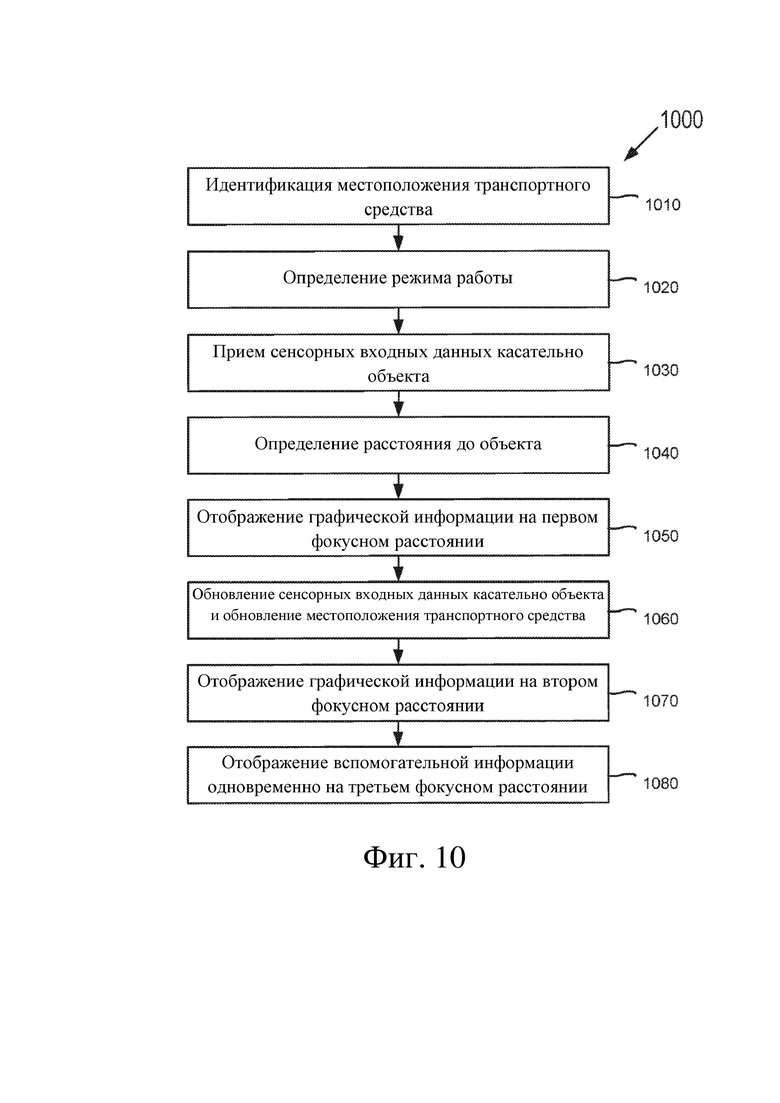
[0018] На фиг. 9 показана структурная схема иллюстративной системы отображения.
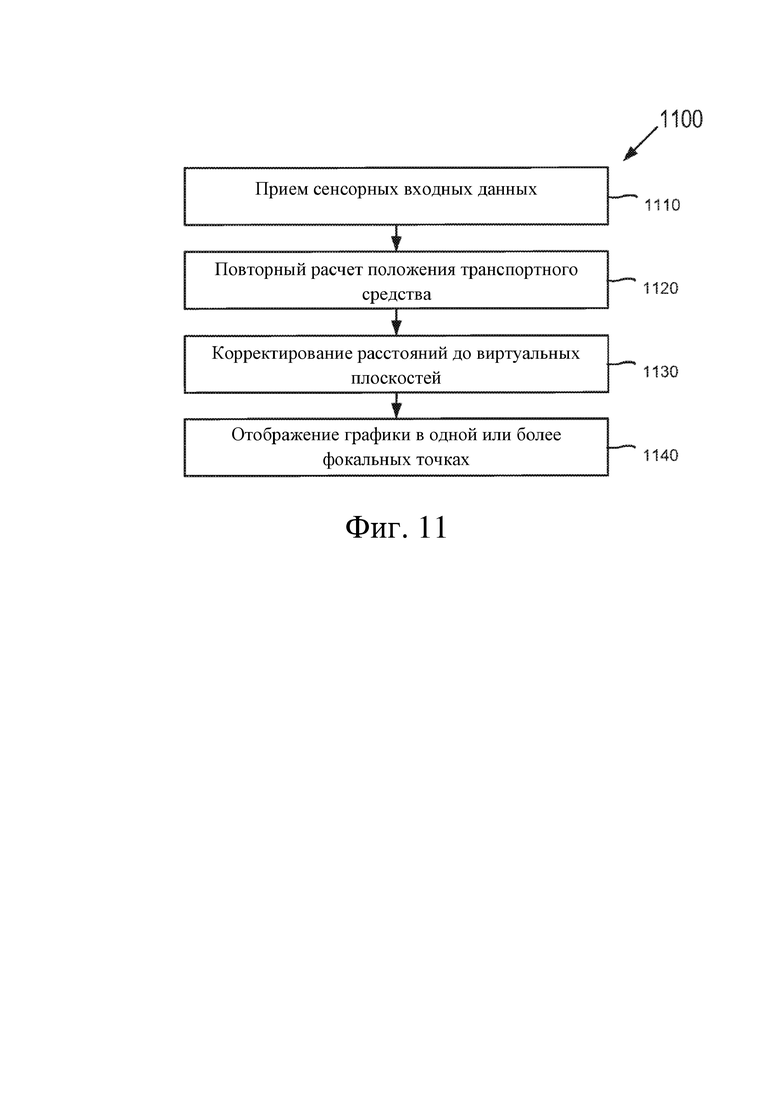
[0019] На фиг. 10 показан иллюстративный способ отображения генерируемой компьютером виртуальной графики.
[0020] На фиг. 11 показан иллюстративный способ отображения генерируемой компьютером виртуальной графики.
ПОДРОБНОЕ ОПИСАНИЕ
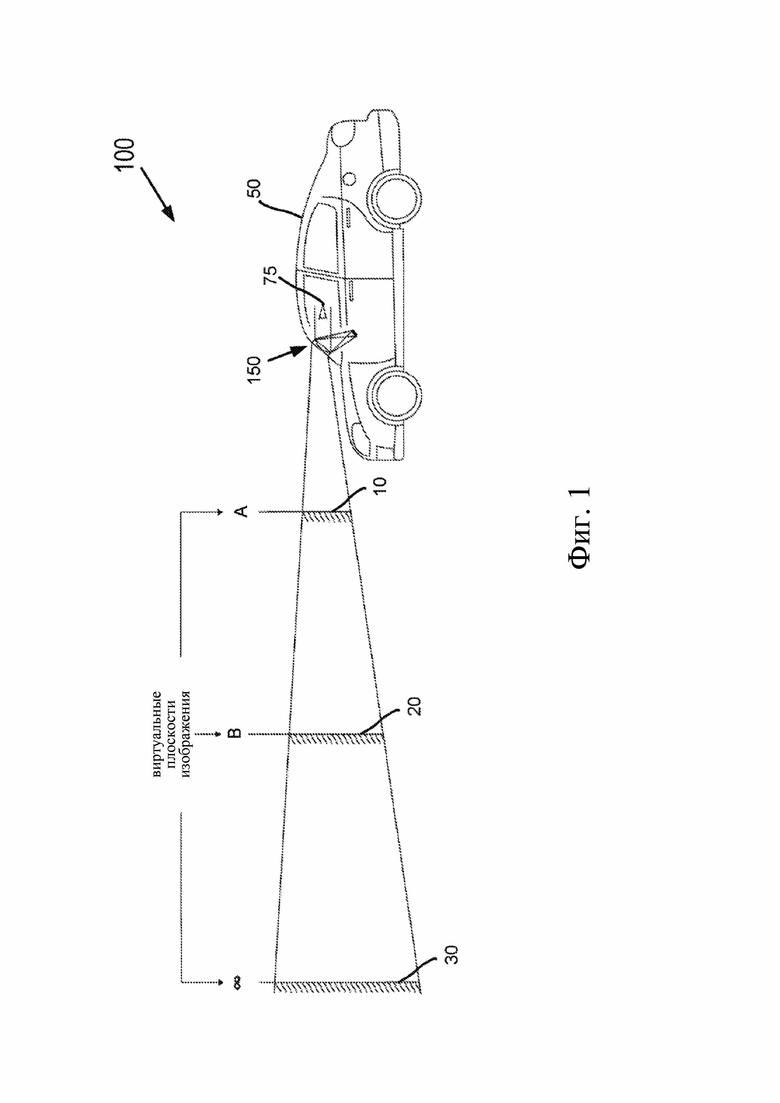
[0021] На фиг. 1 показана иллюстративная система 100 отображения для транспортного средства 50, выполненная с несколькими плоскостями изображения, включая первую плоскость 10 изображения, вторую плоскость 20 изображения и третью плоскость 30 изображения. В некоторых примерах первая плоскость 10 изображения может быть связана с фокусным расстоянием A, вторая плоскость 20 изображения может быть связана с фокусным расстоянием B, и третья плоскость 30 изображения может быть связана с фокусным расстоянием, которое стремится к бесконечности.
[0022] Когда транспортное средство 50 движется на относительно высоких скоростях, например, по свободной трассе на скоростях выше 40 миль в час, система 150 проецирования изображения может быть выполнена с возможностью отображения одного или более элементов генерируемой компьютером виртуальной графики, например, изображений, текста или других типов наглядной информации, для оператора транспортного средства или наблюдателя 75 на третьей плоскости 30 изображения. В некоторых примерах третья плоскость 30 изображения может стремиться к заранее заданному расстоянию, например, расстоянию более двадцати метров, от транспортного средства 50. На относительно высоких скоростях оператор 75, как правило, может смотреть вперед на дорогу и искать объекты, которые могут находиться на расстояниях, превышающих заранее заданное расстояние, составляющее двадцать метров. Соответственно, система 100 отображения может быть выполнена таким образом, чтобы фокальная плоскость, связанная с генерируемой компьютером виртуальной графикой, совпадала с относительно далекими объектами, которые наблюдает оператор 75.
[0023] С другой стороны, когда транспортное средство движется на скоростях среднего диапазона, например, когда оператор 75 ведет транспортное средство 50 по городским улицам или по загруженным трассам со скоростью выше 20 миль в час, но ниже 40 миль в час, система 100 отображения может проецировать виртуальную графику на вторую плоскость 20 изображения, чтобы она совпадала с объектами, расположенными на фокусном расстоянии B от транспортного средства 50. В некоторых примерах фокусное расстояние B, связанное со второй плоскостью 20 изображения, может составлять менее двадцати метров, например, приблизительно десять метров.
[0024] Когда транспортное средство 50 движется на относительно низких скоростях, например, когда оператор 75 маневрирует транспортным средством 50 на парковке или объезжает место аварии на скорости менее 20 миль в час, система 100 отображения может быть выполнена с возможностью проецирования виртуальной графики на первую плоскость 10 изображения, чтобы она совпадала с объектами, которые расположены на фокусном расстоянии A от транспортного средства 50. В некоторых примерах фокусное расстояние A, связанное с первой плоскостью 10 изображения, может составлять менее десяти метров, например, приблизительно три–пять метров.
[0025] Система 100 отображения может быть выполнена с возможностью проецирования виртуальных изображений на варьирующиеся в динамическом режиме плоскости изображения с варьирующимися в динамическом режиме фокусными расстояниями до оператора 75 согласно рабочим параметрам, включающим скорость транспортного средства 50, место нахождения реальных объектов и тому подобное. Например, когда транспортное средство 50 начинает ускоряться из остановленного положения, устройство 100 отображения может быть выполнено с возможностью последовательного изменения фокусного расстояния плоскости изображения, которая отображается для оператора 75, с первой плоскости 10 изображения на вторую плоскость 20 изображения и со второй плоскости 20 изображения на третью плоскость 30 изображения. В некоторых примерах система 100 отображения может содержать средства ручного управления, позволяющие оператору 75 выборочно отображать виртуальную графику в одной или более из плоскостей 10, 20, 30 и т. д. изображения или в разных вертикальных или горизонтальных положениях на лобовом стекле. В других примерах система 100 отображения может быть выполнена с возможностью отображения первой части генерируемой компьютером виртуальной графики в плоскости изображения, выбранной на основании скорости перемещения транспортного средства, а вторая часть графики может отображаться на вспомогательной плоскости изображения, выбранной оператором 75.
[0026] Система 100 отображения может быть выполнена с возможностью проецирования виртуальной графики на плоскости изображения с варьирующимися в динамическом режиме фокусными расстояниями на основании, по меньшей мере частично, рабочих параметров, включающих расстояние между фактическим реальным объектом и транспортным средством 50, определяемое системой 100 отображения или связанным с ней устройством навигации. Например, когда транспортное средство 50 поворачивает, система 100 может отслеживать расстояние до поворотной кривой и в динамическом режиме менять плоскости изображения для проецирования виртуальной графики, чтобы оператору 75 не приходилось менять фокус с виртуальной графики на поворотную кривую. Иначе говоря, система 100 в динамическом режиме меняет плоскости изображения, на которые проецирует виртуальную графику, чтобы сохранять соответствие с меняющимся расстоянием между транспортным средством 50 и любым реальным объектом.
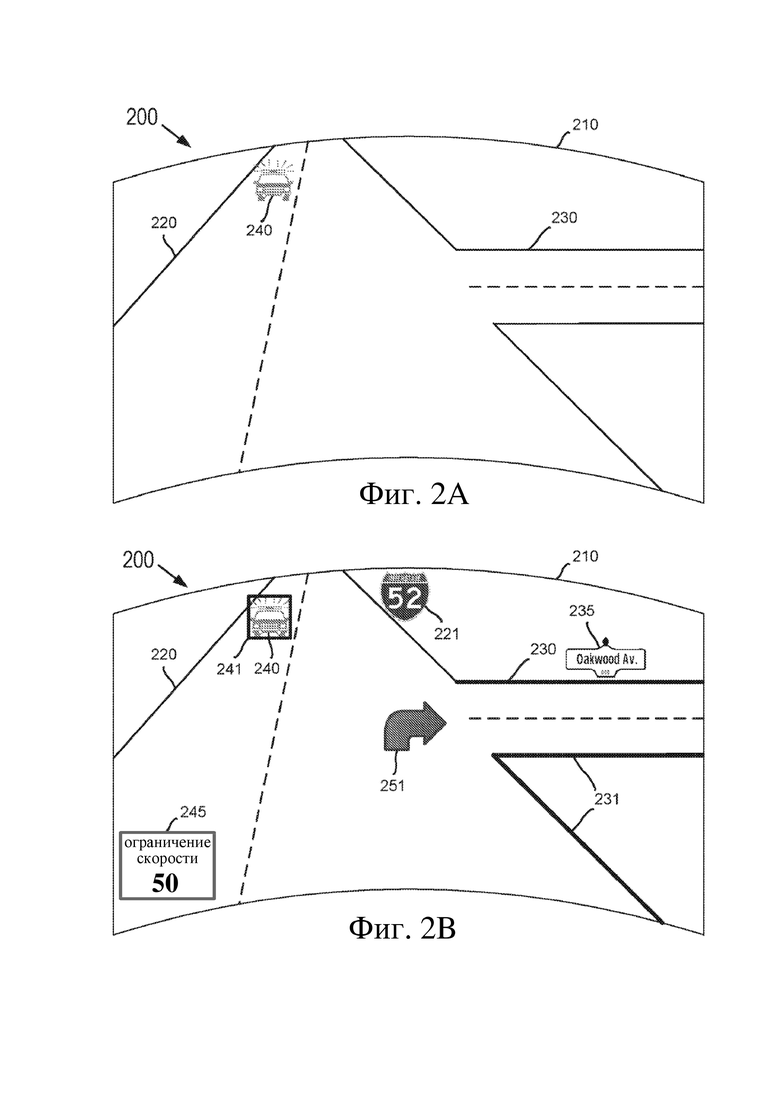
[0027] На фиг. 2A показано иллюстративное устройство 200 отображения, связанное с реальными объектами, которые могут быть видны через лобовое стекло 210 транспортного средства 50, показанного на фиг. 1. На фиг. 2B показано иллюстративное устройство 200 отображения, причем генерируемая компьютером графика отображается в нескольких фокальных плоскостях изображения. Касательно фиг. 1, 2A и 2B, в варианте осуществления оператор 75 может видеть дорогу 220, по которой едет транспортное средство 50, а также другие объекты через лобовое стекло 210. Дорога 220 может быть соединена с боковой дорогой 230, к которой приближается транспортное средство 50. Кроме дороги 220, оператор 75 может видеть через лобовое стекло 210 другие объекты вдоль пути следования, в том числе другие транспортные средства 240. В некоторых примерах объекты, видимые через лобовое стекло 210, могут изображать реальные объекты, которые система 200 может дополнять или не дополнять генерируемой компьютером виртуальной графикой. Система 200 может автоматически дополнять реальные объекты виртуальной графикой на основании местоположения, скорости перемещения, направления перемещения, ситуации на дороге, рабочих параметров транспортного средства, погоды и тому подобного. Система 200 может автоматически дополнять реальные объекты виртуальной графики на основании настроек транспортного средства 50.
[0028] Система 100 может дополнять реальные объекты, видимые через лобовое стекло 210, виртуальной графикой, проецируемой на лобовое стекло 210 в нескольких фокальных плоскостях изображения. Например, система 100 может проецировать условное обозначение 221 трассы, связанное с текущей дорогой 220, на третью фокальную плоскость 30 изображения. Условное обозначение 221 трассы может выглядеть для оператора 75 так, будто оно расположено в некоторой удаленной точке впереди по текущей дороге 220, что в некоторых примерах может быть близким к фокальной точке бесконечности. Система 100 может проецировать графическое оповещение 241 о приближающемся транспортном средстве 240, чтобы оповещать оператора 75 о присутствии и близости приближающегося транспортного средства 240.
[0029] Система 100 может проецировать графическое оповещение 241 поверх транспортного средства 240 или вокруг него, частично или полностью. Система 100 может проецировать графическое оповещение 241 любого цвета или формы, известных специалистам в данной области техники. Графическое оповещение 241 может сопровождаться звуковым оповещением, слышимым для оператора 75, который использует встроенную акустическую систему транспортного средства, например, динамики. В некоторых примерах система 100 может проецировать графическое оповещение 241, чтобы отслеживать относительное перемещение транспортного средства 240, меняя в динамическом режиме плоскость изображения, которую она использует для проецирования графического оповещения 241. Когда впереди на текущей дороге 220 на некотором расстоянии от транспортного средства 50, например, на расстоянии более двадцати метров, находится транспортное средство 240 службы обеспечения общественной безопасности, система может проецировать графическое оповещение 241 на фокусном расстоянии, соответствующем третьей плоскости 30 изображения, подобной плоскости проецирования изображения, используемой для проецирования условного обозначения 221 трассы. Когда транспортное средство 240 приближается к транспортному средству 50, система 100 меняет фокальную плоскость изображения, которую она использует для проецирования графического оповещения 241, с третьей плоскости 30 изображения на вторую плоскость 20 изображения так, чтобы графическое оповещение 241 отслеживало перемещение транспортного средства 240.
[0030] Система 100 может проецировать на лобовое стекло 221 дополнительную информацию 245, связанную с транспортным средством 50, дорогой 220, объектом, который видно через лобовое стекло 221, или тому подобным. Например, система 100 может быть выполнена с возможностью отображения ограничения 245 скорости, связанного с текущей дорогой 220, в ответ на идентификацию транспортного средства 240 как транспортного средства службы обеспечения общественной безопасности, или в ответ на идентификацию дороги 220 как трассы. Система 100 может быть способна определять, что транспортное средство 240 является транспортным средством службы обеспечения общественной безопасности, путем выявления наличия определенных характеристик транспортного средства 240, например, оборудования, сигнальных огней, опознавательных знаков транспортного средства и тому подобного, используя любую известную систему либо внутри, либо снаружи транспортного средства 50, например, фары и другие датчики. В качестве дополнения, система 100 может быть выполнена с возможностью оповещения оператора 75, если транспортное средство 50 перемещается быстрее, чем допускает указанное на дорожных знаках ограничение скорости для текущей дороги 220, например, путем выведения дополнительной информации 245 или предоставления звукового оповещения посредством акустической системы транспортного средства 50. В некоторых примерах система 100 может быть выполнена с возможностью отображения дополнительной информации 245 в любой подходящей плоскости изображения, например, в первой плоскости 10 изображения.
[0031] Система 100 может быть выполнена с возможностью проецирования на лобовое стекло 210 навигационной информации 251, такой как указатель поворота, связанной с маршрутом 231. Система 100 может проецировать навигационную информацию 251 на лобовое стекло 210, обеспечивая при этом звуковую пошаговую инструкцию, например, «поверните направо на Oakwood Avenue», при помощи любых доступных акустических средств, например, акустической системы транспортного средства 50. Система 100 может по существу одновременно проецировать название маршрута 235, путем наложения или иным образом, в той же плоскости изображения, что и боковая дорога 230. В некоторых примерах система 100 может быть выполнена с возможностью отображения навигационной информации 251, маршрута 231 и названия маршрута 235 в любой одной плоскости изображения, например, во второй плоскости 20 изображения. В некоторых примерах система 100 может быть способна проецировать определенную виртуальную графику, например, дополнительную информацию 245, в первой плоскости 10 изображения, проецируя при этом другую виртуальную графику, например, название маршрута 235, во второй плоскости 20 изображения, отличной от первой плоскости 10 изображения. В некоторых примерах система 100 может определять плоскости изображения, в которых нужно проецировать виртуальную графику, на основании рабочих параметров, например, местоположения реальных объектов, скорости транспортного средства, местоположения транспортного средства, положения оператора, ситуации на дороге и тому подобного, как более подробно объясняется ниже.
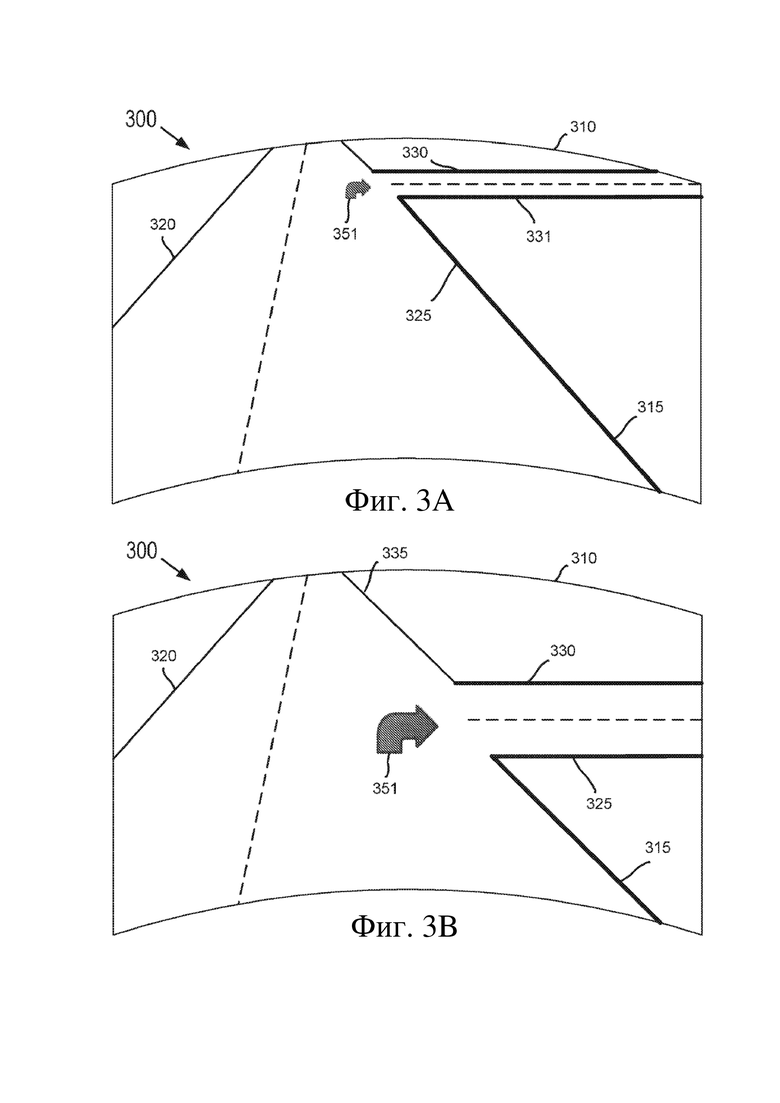
[0032] На фиг. 3A показано иллюстративное устройство 300 отображения, причем генерируемая компьютером виртуальная графика отображается на наклонной плоскости изображения. На фиг. 3B показано иллюстративное устройство отображения, причем обновленная плоскость изображения связана с генерируемой компьютером виртуальной графикой. Касательно фиг. 1, 3A и 3B, система 100 может быть выполнена с возможностью проецирования виртуальной графики на устройство 300 отображения. Например, система 100 может быть выполнена с возможностью проецирования на лобовое стекло 310 навигационной информации 351, такой как указатель поворота, связанной с маршрутом 331. Система 100 может проецировать навигационную информацию 351, обеспечивая при этом звуковую пошаговую навигационную инструкцию при помощи любых доступных акустических средств, например, акустической системы транспортного средства 50. Навигационная информация 351 может включать указание свернуть с текущей дороги 320 на боковую улицу 330. Текущую дорогу 320 и боковую улицу 330 может быть видно, по меньшей мере частично, через лобовое стекло 310 транспортного средства 50. Фиг. 3A можно понимать как изображение маршрута 331 на плоскости 30 изображения, когда боковая улица 330 находится на некотором расстоянии впереди по текущей дороге 320. Например, система 100 может проецировать навигационную информацию 351 на плоскость 30 изображения, когда система 100 определяет, что боковая улица 330 находится на заранее заданном расстоянии, например, более двадцати метров, от транспортного средства 50. Система 100 может определять расстояние между транспортным средством 50 и реальными объектами, например, боковой улицей 330, при помощи любых средств, известных специалистам в данной области техники, включая оптические датчики, глобальные системы определения местоположения и другие устройства (не показаны), подключенные или иным образом подсоединенные к транспортному средству 50 и более подробно объясняемые ниже, например, при описании фиг. 9.
[0033] Устройство 100 отображения может быть выполнено с возможностью отображения различных частей маршрута 331 на смещенной или наклонной плоскости изображения. Например, система 100 может проецировать на лобовое стекло 310 первую часть маршрута 331 на первом фокусном расстоянии 315, вторую часть маршрута 331 на втором фокусном расстоянии 325, большем, чем первое фокусное расстояние 315, и третью часть маршрута 331 на третьем фокусном расстоянии 335, большем, чем второе фокусное расстояние 325. В некоторых примерах фокусные расстояния 315, 325 и 335, связанные с графическим наложением маршрута 331, могут постоянно варьироваться между первой частью и третьей частью, обеспечивая плавную непрерывную последовательность или градуировку фокусных расстояний, связанных с маршрутом 331, сравнимую с фокусными расстояниями реальных объектов, которые соответствуют маршруту 331.
[0034] Когда транспортное средство 50 приближается к боковой улице 330, боковая улица 330 может визуально опускаться ниже, к середине лобового стекла 310, из-за смещения или наклона плоскости изображения. Система 100 может проецировать маршрут 331 и навигационную информацию 351 ниже, ближе к середине лобового стекла 310, по сравнению с положениями, показанными на фиг. 3A.
[0035] В дополнение к отслеживанию местоположения реальных объектов относительно горизонтально-вертикальных двухмерных координат лобового стекла 310, чтобы виртуальная графика дополняла или выглядела наложенной на реальные объекты в ракурсе оператора 75, система 100 также может быть выполнена с возможностью отслеживания относительных расстояний до реальных объектов и корректирования фокальных точек и/или плоскостей изображения или графики, которая накладывается на реальные объекты. Система 100 может выявлять, генерировать или иным образом определять относительные расстояния при помощи любых известных средств, включая использование оптических датчиков, глобальных систем определения местоположения и других устройств (не показаны), подключенных или иным образом подсоединенных к транспортному средству 50.
[0036] Система 100 может быть выполнена с возможностью постепенного уменьшения фокусного расстояния боковой улицы 330 так, чтобы та выглядела находящейся скорее на втором фокусном расстоянии 325, чем на третьем фокусном расстоянии 335. Аналогично, система 100 может быть выполнена с возможностью уменьшения фокусного расстояния второй часть маршрута 331 перед боковой улицей 330 со второго фокусного расстояния 325 до первого фокусного расстояния 315. В некоторых примерах благодаря динамическому варьированию и/или корректированию фокальной точки одной или более частей маршрута 331, оператору 75 проще устанавливать расстояние и/или местоположение навигационной информации 351 относительно маршрута 330.
[0037] На фиг. 4 показано упрощенное графическое представление иллюстративной проекционной системы 400, такой как система 100, показанная на фиг. 1, выполненной с возможностью проецирования или отображения виртуальной графики в нескольких фокальных плоскостях изображения. Касательно фиг. 1 и 4, проекционная система 400 может содержать прозрачную голографическую пленку 411, прикрепленную к лобовому стеклу 410. Голографическая пленка 411 может быть интегрирована в лобовое стекло 410 или иным образом прикреплена к нему. Альтернативно, голографическая пленка 411 может быть размещена на устройстве отображения (не показано отдельно от системы 400), которое размещено между оператором 75 и лобовым стеклом 410. В некоторых примерах голографическая пленка 411 может содержать несколько коллиматоров 415, встроенных в пленку 411 для коллимации и/или комбинирования света, испускаемого матрицей 460 изображений, с изображениями реальных объектов, проходящими сквозь пленку 411 к оператору 75.
[0038] В иллюстративном варианте осуществления проекционная система 400 может содержать устройство 480 переноса, выполненное с возможностью сдвигания относительного положения матрицы 460 изображений и/или плоскости изображения, с тем чтобы оператор 75 мог видеть генерируемую компьютером виртуальную графику в динамически меняющихся фокальных плоскостях изображения и/или в фокальных положениях на основании, по меньшей мере частично, положения оператора 75. Устройство 480 переноса может в динамическом режиме сдвигать матрицу 460 изображений в горизонтальном или вертикальном направлении, а также менять угол наклона матрицы 460 изображений на основании, по меньшей мере частично, рабочих параметров или настроек транспортного средства. Устройство 480 переноса может содержать электрический двигатель, такой как линейный двигатель, двигатель постоянного тока, бесщеточный двигатель, шаговый двигатель или ультразвуковой пьезодвигатель с необязательной обратной связью по положению. В других примерах устройство 480 переноса может содержать винтовой пьезодвигатель, серводвигатель, механический привод, магнитный выключатель, датчик положения, другие типы устройств позиционирования или электрических двигателей или любую их комбинацию.
[0039] Физический сдвиг матрицы 460 изображений внутри проекционной системы 400 ближе к коллиматору 415 может приводить к перемещению фокальной плоскости проецированной виртуальной графики дальше от оператора 75, пока фокальная плоскость не достигнет бесконечности. Наоборот, сдвиг матрицы 460 изображений внутри проекционной системы 400 дальше от коллиматора 415 может приводить к перемещению фокальной плоскости проецированной виртуальной графики ближе к оператору 75. В некоторых примерах матрица 460 изображений может содержать жидкокристаллический дисплей (LCD), цифровое микрозеркальное устройство (DMD), микроэлектромеханическое (MEMS) лазерное сканирующее устройство, матрицу из жидких кристаллов на кремнии (LCoS), матовое стекло с проецированным изображением, другие типы матриц изображения или любую их комбинацию.
[0040] На фиг. 5 показана иллюстративная система 500 отображения, выполненная с возможностью взаимодействия с бортовой операционной системой 520. Касательно фиг. 1 и 5, бортовая операционная система 520 может содержать один или более процессоров транспортного средства или бортовых компьютеров, запоминающее устройство любого известного типа и команды, записанные в запоминающем устройстве, которые могут взаимодействовать с ИЛС-процессором 510. В иллюстративном варианте осуществления система 500 отображения может быть выполнена с возможностью подключения к бортовой операционной системе 520 через порт бортовой диагностики (OBD) транспортного средства 50, как хорошо известно специалистам в данной области техники. ИЛС-процессор 510 может быть выполнен с возможностью управления или иным образом манипулирования проекционным устройством 530, которое, в свою очередь, может быть выполнено с возможностью генерирования и/или проецирования света, представляющего по меньшей мере одно виртуальное изображение, на матрицу 550 изображений. ИЛС-процессор 510 может на основании рабочих параметров определять, какую виртуальную графику отображать на устройстве 560 отображения, и давать сигнал касательно виртуальной графики проекционному устройству 530, которое, в свою очередь, может проецировать свет, представляющий виртуальную графику, на матрицу 550 изображений. В некоторых примерах одно или более оптических устройств 540 или линз могут быть выполнены с возможностью исправления аберрации, фильтрации и/или повышения эффективности использования света. Оптические устройства 540 могут включать любой тип оптических устройств, например, фильтры, известные специалистам в данной области техники.
[0041] Матрица 550 изображений, в свою очередь, может быть выполнена с возможностью выборочного распределения и/или распространения виртуального изображения, принимаемого в виде света от проекционного устройства 530 или оптических устройств 540, в виде одного или более фронтов волны на устройство 560 отображения. В некоторых примерах устройство 560 отображения может содержать лобовое стекло транспортного средства, например, лобовое стекло 410, показанное на фиг. 4, голографическую пленку, размещенную смежно с лобовым стеклом, например, голографическую пленку 411, показанную на фиг. 4, или их комбинацию.
[0042] В некоторых примерах матрица 550 изображений может содержать голографический фазово-амплитудный модулятор, выполненный с возможностью имитирования произвольного фронта волны света. В иллюстративном варианте осуществления матрица 550 изображений может имитировать фронт волны для каждой из нескольких плоскостей изображения так, чтобы каждый фронт волны представлял виртуальное изображение. Матрица 550 изображений может быть выполнена с возможностью реализации произвольного количества виртуальных плоскостей изображения так, чтобы информация отображалась на них одновременно и в произвольном порядке.
[0043] Матрица 550 изображений может содержать фазовый модулятор высокого разрешения, такой как модулятор высокой четкости, имеющий любое разрешение, известное специалисту в данной области техники, например, разрешение 4000 или более пикселей. Матрица 550 изображений может освещаться когерентным излучением, принимаемым от проекционного устройства 530 или оптических устройств 540, с заранее определенной расходимостью луча. Матрица 550 изображений может выводить цифровую голограмму на модулятор и может проецировать фронт волны, представляющий голограмму, на устройство 560 отображения одновременно в нескольких виртуальных плоскостях 570 изображения.
[0044] Система 500 отображения может быть выполнена с возможностью генерирования одного или более элементов виртуальной графики, например, изображений, текста или любой другой графической информации, известной специалисту в данной области техники, на плоскость 570 изображения. В некоторых примерах плоскость 570 изображения может быть связана с фокусным расстоянием 575. Хотя плоскость 570 изображения показана расположенной на противоположной стороне устройства 560 отображения от матрицы 550 изображений, в некоторых иллюстративных вариантах осуществления устройство 500 отображения может быть выполнено с возможностью отражения света, связанного с фронтом волны, распространяемым матрицей 550 изображений, с тем чтобы полученное в результате изображение отражалось обратно оператору 75. Хотя изображение может отражаться от устройства 560 отображения обратно оператору 75, плоскость изображения, тем не менее, может казаться оператору расположенной на противоположной стороне устройства 560 отображения (например, на той же стороне устройства отображения, что и реальные объекты снаружи транспортного средства).
[0045] Дополнительно система 500 отображения может содержать устройство переноса или двигатель 580, выполненный с возможностью варьирования в динамическом режиме фокусного расстояния 575, связанного с плоскостью 570 изображения. В некоторых примерах двигатель 580 может быть выполнен с возможностью сдвигания матрицы 550 изображений относительно устройства 560 отображения в любом направлении, например, вертикальном или горизонтальном, а также изменения угла наклона устройства 550 изображений. В других примерах двигатель 580 может быть выполнен с возможностью сдвигания одного или более оптических устройств 540 относительно матрицы 550 изображений. Кроме того, двигатель 580 может быть выполнен с возможностью варьирования фокусного расстояния 545 между одним или более оптическими устройствами 540 и матрицей 550 изображений. Двигатель 580 может в динамическом режиме варьировать фокусное расстояние 575, сдвигая матрицу 550 изображений относительно устройства 560 отображения или относительно оптических устройств 540 или сдвигая оптические устройства 540 относительно матрицы 550 изображений. В иллюстративном варианте осуществления двигатель 580 может в динамическом режиме варьировать фокусное расстояние 575 на основании, по меньшей мере частично, заранее заданных рабочих параметров, включая параметры транспортного средства, например, скорость, местоположение, направление перемещения, пункт назначения, местоположение лобового стекла, ситуацию на дороге и тому подобное, дорожные параметры, например, местоположение или наличие реальных объектов, дорог и тому подобное, параметры оператора транспортного средства, например, местоположение оператора внутри транспортного средства, положение глаз оператора и отслеживание их движения, параметры оператора, например, отслеживание движения глаз, положение глаз, положение системы и тому подобное, или их комбинацию. Рабочие параметры могут дополнительно включать любые входные данные от любого из нескольких источников, включая системы или настройки транспортного средства, например, систему 970 распознавания пользователя, камеру 930, датчики 920, пользовательский ввод 960, входные данные 950 транспортного средства, аудиоустройство 915, GPS 940 или их комбинацию, как показано на фиг. 9.
[0046] В дополнение к варьированию фокусного расстояния 575 плоскости 570 изображения, двигатель 580 может быть выполнен с возможностью корректирования относительного расстояния плоскости изображения до оператора 75. В иллюстративном варианте осуществления система 500 отображения может быть выполнена с возможностью совмещения с несколькими различными типами транспортных средств, что может быть связано с различными положениями оператора, включая высоту, на которой расположены глаза оператора, или расстояние от оператора до лобового стекла, например, лобового стекла 410, показанного на фиг. 4.
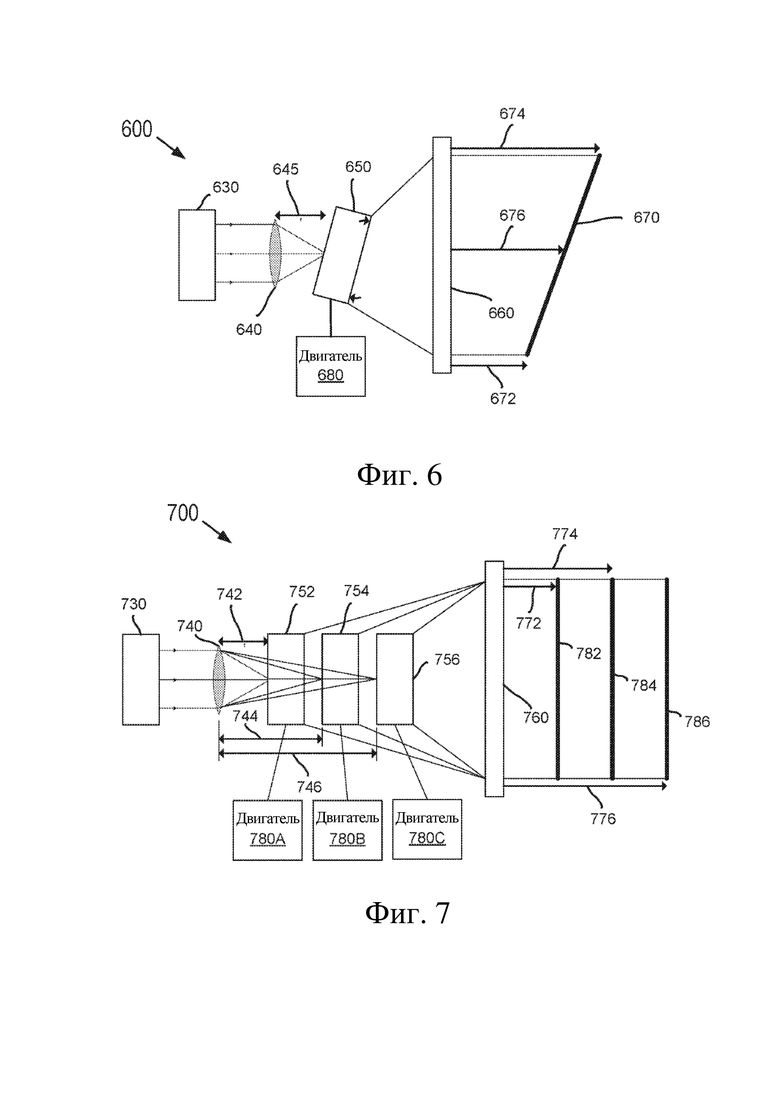
[0047] На фиг. 6 показана иллюстративная система 600 отображения, выполненная с возможностью генерирования виртуальной графики на наклонной плоскости 670 изображения. Система 600 отображения может содержать проекционное устройство 630, выполненное с возможностью проецирования света на матрицу 650 изображений, которая, в свою очередь, может быть выполнена с возможностью выборочного распределения и/или распространения света в виде одного или более фронтов волны на устройство 660 отображения, подобное тому, которое описано для системы 500 отображения, показанной на фиг. 5.
[0048] Двигатель 680, связанный с системой 600 отображения, может быть выполнен с возможностью варьирования в динамическом режиме угла наклона матрицы 650 изображений, чтобы влиять на угол наклонной плоскости 670 изображения, на основании, по меньшей мере частично, рабочих параметров, включая параметры транспортного средства, например, скорость, местоположение, направление перемещения, пункт назначения, местоположение лобового стекла и тому подобное, дорожные параметры, например, местоположение или наличие реальных объектов, дорог и тому подобное, параметры оператора транспортного средства, например, местоположение оператора внутри транспортного средства, положение глаз оператора и отслеживание их движения, или параметры оператора, например, положение глаз, отслеживание движения глаз, положение головы и тому подобное, или их комбинацию.
[0049] Например, за счет смещения матрицы 650 изображений нижняя часть наклонной плоскости 670 изображения может быть связана с первым фокусным расстоянием 672, а верхняя часть наклонной плоскости 670 изображения может быть связана со вторым фокусным расстоянием 674, большим, чем первое фокусное расстояние 672. В качестве дополнения, центральная часть наклонной плоскости 670 изображения может быть связана с промежуточным фокусным расстоянием 676 между первым фокусным расстоянием 672 и вторым фокусным расстоянием 674, например, с фокусным расстоянием, равным среднему расстоянию первого и второго фокусных расстояний 672 и 674 соответственно. В некоторых иллюстративных вариантах осуществления, в дополнение к варьированию угла наклонной плоскости изображения, двигатель 680 может быть выполнен с возможностью корректирования относительного расстояния плоскости изображения до оператора 75 на по существу горизонтальной оси. Например, система 600 отображения может быть выполнена с возможностью совмещения с несколькими различными типами транспортных средств, что может быть связано с различными положениями оператора, включая высоту, на которой расположены глаза оператора 75, или расстояние от оператора 75 до лобового стекла, например, лобового стекла 410, показанного на фиг. 4.
[0050] В некоторых иллюстративных вариантах осуществления в дополнение к варьированию угла наклона матрицы 650 изображений, двигатель 680 может быть выполнен с возможностью линейного смещения матрицы 650 изображений и/или оптического устройства 640 на расстояние 645, чтобы переносить наклонную плоскость 670 изображения ближе к устройству 660 отображения или дальше от него.
[0051] На фиг. 7 показана иллюстративная система 700 отображения, содержащая несколько расположенных одна над другой матриц изображения, в том числе первую матрицу 752 изображений, вторую матрицу 754 изображений и третью матрицу 756 изображений. В некоторых примерах некоторые или все из расположенных одна над другой матриц могут представлять собой прозрачную матрицу изображений, которая физически может быть размещена на разных расстояниях от устройства 760 отображения. В некоторых примерах расположенные одна над другой матрицы изображения могут быть выполнены с возможностью отображения информации на разных расстояниях от устройства 760 отображения по существу одновременно. Каждая плоскость изображения внутри системы 700 отображения может быть выполнена с возможностью образования виртуальной плоскости изображения на разных расстояниях от устройства 760 отображения и, следовательно, на разных расстояниях от оператора 75. За счет этого виртуальная графика может быть отображена на разных фокусных расстояниях или плоскостях изображения до оператора 75, чтобы таким образом дополнять реальные объекты в динамически варьируемых фокальных плоскостях изображения.
[0052] Например, первая матрица 752 изображений может быть выполнена с возможностью генерирования одного или более элементов виртуальной графики, например, изображений или текста, в первой плоскости 782 изображения, расположенной на первом фокусном расстоянии 772, а вторая матрица 754 изображений может быть выполнена с возможностью генерирования одного или более элементов виртуальной графики, например, изображений или текста, во второй плоскости 784 изображения, расположенной на втором фокусном расстоянии 774. В качестве дополнения, третья матрица 756 изображений может быть выполнена с возможностью генерирования одного или более элементов виртуальной графики, например, изображений и/или текста, в третьей плоскости 786 изображения, расположенной на третьем фокусном расстоянии 776. В некоторых примерах первое фокусное расстояние 772 может составлять приблизительно три–пять метров, второе фокусное расстояние 774 может составлять приблизительно десять–двадцать метров, и третье фокусное расстояние 776 может стремиться к бесконечности. Специалисту в данной области техники будет понятно, что фокальные плоскости 782, 784 и 786 изображения могут быть установлены на любом фокусном расстоянии в зависимости от рабочих параметров или других характеристик.
[0053] Система 700 отображения может быть выполнена с возможностью направления света от проекционного устройства 730 на каждую из матриц 752, 754 и/или 756 изображения. В некоторых примерах одно или более оптических устройств 740 могут быть выполнены с возможностью направления света на каждую из матриц 752, 754 и/или 756. Первая фокальная точка 742 может быть связана с первым устройством 752 изображения. Вторая фокальная точка 744 может быть связана со вторым устройством 754 изображения. И третья фокальная точка 746 может быть связана с третьим устройством 756 изображения. В иллюстративном варианте осуществления каждое из устройств 752, 754 и 756 изображения может быть связано с соответствующим устройством 780A, 780B или 780C переноса соответственно, чтобы варьировать фокусное расстояние, например, первой фокальной точки 742, второй фокальной точки 744 и третьей фокальной точки 746. В качестве дополнения, угол наклона одной или более плоскостей 782, 784 или 786 изображения можно варьировать, варьируя угол наклона матриц 752, 754 или 756 изображений при помощи одного или более устройств переноса или двигателей 780A, 780B или 780C. Специалистам в данной области техники должно быть понятно, что для изменения угла наклона матриц 752, 754 и 756 изображений может использоваться один двигатель 780. В качестве альтернативы, каждая матрица 752, 754 или 756 изображений может быть функционально связана с отдельным устройством переноса или двигателем 780A, 780B или 780C соответственно. Специалистам в данной области техники должно быть понятно, что двигатели 780A, 780B или 780C могут иметь конструкцию, подобную двигателю 680, показанному на фиг. 6, или двигателю 580, показанному на фиг. 5.
[0054] На фиг. 8 показана иллюстративная система 800 отображения, содержащая несколько матриц изображений, в том числе первую матрицу 852 изображений и вторую матрицу 854 изображений. Касательно фиг. 1 и 8, в некоторых примерах каждая из матриц 852 и 854 изображения может быть связана с проекционным устройством, таким как первое проекционное устройство 832 и второе проекционное устройство 834, и с одним или более оптическими устройствами, такими как первое оптическое устройство 842 и второе оптическое устройство 844. Первое оптическое устройство 842 может иметь фокусное расстояние 862 от первой матрицы 852 изображений, а второе оптическое устройство 844 может иметь второе фокусное расстояние 864 от второй матрицы 854 изображений.
[0055] Несколько матриц изображений или проекционных устройств 852 и 854 могут быть выполнены с возможностью отображения разных изображений для правого и левого глаза оператора 75, чтобы таким образом совместно формировать стереоскопическое изображение, которое отображается на устройстве 860 отображения в плоскостях 882 и 884 изображения. В иллюстративном варианте осуществления камера 930 (фиг. 9) может использоваться для отслеживания положения каждого из глаз оператора 75, правого и левого. Изображения, отображаемые одной или обеими из первой матрицы 852 изображений и второй матрицы 854 изображений, может корректироваться в соответствии с конкретными положениями правого и левого глаза оператора 75.
[0056] Первая матрица 852 изображений или вторая матрица 854 изображений может быть выполнена подобно матрице 550 изображений, показанной на фиг. 5, матрице 650 изображений, показанной на фиг. 6, матрицам 752, 754 или 756 изображений, показанным на фиг. 7, или матрице 850 изображений, показанной на фиг. 8. В некоторых примерах вторая матрица 854 изображений может быть смещена вбок относительно первой матрицы 852 изображений, или наоборот. В качестве дополнения, вторая матрица 854 изображений может быть наклонена относительный устройства 860 отображения, причем первая матрица 852 изображений и вторая матрица 854 изображений могут быть выполнены с возможностью распространения одного или более фронтов волны в сторону него.
[0057] Первая матрица 852 изображений может быть выполнена с возможностью проецирования света, представляющего виртуальную графику, например, одно или более изображений и/или текст, в первой плоскости 882 изображения. В некоторых примерах первая плоскость 882 изображения может в целом быть связана с фокусным расстоянием 872 так, чтобы каждый элемент виртуальной графики, генерируемый первой матрицей 852 изображений, мог восприниматься как находящийся приблизительно на одном фокусном расстоянии 872.
[0058] В качестве дополнения, вторая матрица 854 изображений может быть выполнена с возможностью проецирования света, представляющего виртуальную графику, например, одно или более изображений и/или текст, во второй плоскости 884 изображения. В некоторых примерах вторая плоскость 884 изображения может содержать наклонную плоскость изображения, соответствующую одному или более фокусным расстояниям, таким как первое фокусное расстояние 874 и второе фокусное расстояние 876. Первый элемент виртуальной графики, генерируемый второй матрицей 854 изображений, может восприниматься как находящийся приблизительно на первом фокусном расстоянии 874, а второй элемент виртуальной графики, генерируемый второй матрицей 854 изображений, может восприниматься как находящийся приблизительно на втором фокусном расстоянии 876. В некоторых примерах вторая плоскость 884 изображения может быть связана с непрерывной последовательностью фокальных точек, которые ступенчато и/или непрерывно варьируются между первым фокусным расстоянием 874 и вторым фокусным расстоянием 876.
[0059] Первый класс виртуальной графики может быть связан с первой плоскостью 882 изображения, а второй класс виртуальной графики может быть связан со второй плоскостью 884 изображения. Например, виртуальная графика, к примеру, изображения и/или текст, связанная с транспортным средством, такая как скорость транспортного средства или время суток, может отображаться на первой плоскости 882 изображения. Виртуальная графика, например, изображения и/или текст, связанная с навигацией транспортного средства, может отображаться на второй плоскости 884 изображения.
[0060] На фиг. 9 показана упрощенная структурная схема иллюстративной системы 900 отображения. Система 900 может содержать обрабатывающее устройство 910, например, одно или более обрабатывающих устройств, процессор системы на кристалле (SoC), один или более центральных процессоров (CPU) или тому подобное. В некоторых примерах обрабатывающее устройство 910 может содержать усовершенствованную RISC-машину (ARM), микропроцессор без состояний задержки конвейера (MIPS), 32-битный процессор, 64-битный процессор, любой другой тип обрабатывающего устройства, известный специалистам в данной области техники, или любую их комбинацию.
[0061] Обрабатывающее устройство 910 может быть выполнено с возможностью выполнения по существу всех расчетов, связанных с подготовкой и/или генерированием виртуальной графики и/или других типов информации, которые должны проецироваться проекционной системой 980 и/или отображаться на устройстве 990 отображения в режиме реального времени. В качестве дополнения, обрабатывающее устройство 910 может быть выполнено с возможностью сбора информации от датчиков 920, обработки видеосигнала, поступающего от камеры 930, получения пользовательского ввода 960, а также получения входных данных 950 транспортного средства по существу в режиме реального времени. Некоторые или все входные данные могут приниматься и/или передаваться по WiFi-модулю, по модулю Bluetooth или по другим типам модулей связи, известным специалистам в данной области техники, или посредством любой их комбинации.
[0062] Датчики 920 могут включать инерционный датчик, цифровой барометр, прибор для измерения интенсивности света, камеру, температурный датчик, любой другой тип датчиков, известный специалистам в данной области техники, или любую их комбинацию. В некоторых примерах датчики 920 могут использоваться для подтверждения и/или уточнения информации, предоставляемой глобальной навигационной спутниковой системой (GNSS) 940, такой как система «Global Position Sensor» (GPS), GLONASS, GALILEO, BeiDou, любые другие типы навигационных систем или систем обнаружения местоположения, известные специалистам в данной области техники, или любая их комбинация. Например, барометр может использоваться совместно с GNSS 940, чтобы более точно определять относительную высоту транспортного средства и, следовательно, также определять положение транспортного средства относительно нанесенной на карту системы координат.
[0063] Аналогично, входные данные от камеры 930 могут использоваться совместно с GNSS 940, чтобы более точно определять относительное расстояние между транспортным средством и конкретным элементом или заметным объектом местности, связанным с нанесенной на карту системой координат, таким как поворот или пункт назначения. Камера 930 может представлять собой цифровую камеру, LIDAR-камеру, инфракрасную камеру, тепловизионную камеру, другие типы камер или любую их комбинацию. GNSS 940 может представлять собой глобальную систему мобильных коммуникаций (GSM). В примерах, где транспортное средство может иметь свою собственную GNSS или систему позиционирования, обрабатывающее устройство 910 может быть выполнено с возможностью получения информации о местонахождении непосредственно из входных данных 950 транспортного средства.
[0064] Входные данные от камеры 930 могут использоваться для измерения относительного перемещения объекта/изображения и для расчета скорости перемещения транспортного средства и скорости на повороте, чтобы повысить точность датчика положения. Аналогично, входные данные от инерционного датчика 920 могут использоваться при расчете и/или определении скорости транспортного средства, скорости на повороте и положения транспортного средства.
[0065] В качестве дополнения, обрабатывающее устройство 910 может быть выполнено с возможностью приема звуковых входных данных или вывода звуковых данных посредством аудиоустройства 915. Например, обрабатывающее устройство 910 может быть выполнено с возможностью предоставления звуковых указаний в сопровождение информации отображаемого навигационного маршрута или предоставления звуковых оповещений.
[0066] Пользовательский ввод 960 может включать голосовые команды, сигналы управления (такие как нажатие клавиш или переключателей), интерфейс для смартфона или любую их комбинацию. В качестве дополнения, обрабатывающее устройство 910 может быть выполнено с возможностью определения местонахождения и/или идентификации оператора транспортного средства посредством устройства 970 распознавания пользователя. Устройство 970 распознавания пользователя может содержать камеру или отслеживающее устройство, выполненные с возможностью идентификации оператора и/или определения относительного положения оператора и/или его высоты относительно устройства 990 отображения. Обрабатывающее устройство 910 может быть выполнено с возможностью на основании информации, принимаемой из пользовательского ввода 960 и/или устройства 970 распознавания пользователя, инициирования, персонализации, корректирования, калибрования или иного модифицирования функциональности системы 900, чтобы она лучше подходила для конкретного пользователя.
[0067] Обрабатывающее устройство 910 может включать любой тип запоминающего устройства, известный специалисту в данной области техники. Обрабатывающее устройство 910 может выполнять команды, которые хранятся в запоминающем устройстве, чтобы генерировать виртуальную графику на основании, по меньшей мере частично, любого количества параметров, включая пользовательский ввод 960, входные данные 950 транспортного средства, распознавание 970 пользователя, датчики 920, аудиоустройство 915, GNSS 940, или тому подобное, или любую их комбинацию.
[0068] На фиг. 10 показан иллюстративный способ 1000 отображения генерируемой компьютером виртуальной графики. В ходе операции 1010 система отображения может идентифицировать местоположение транспортного средства оператора. Например, транспортное средство оператора может быть оборудовано системой GNSS.
[0069] В ходе операции 1020 система отображения может определять режим работы на основании рабочих параметров или настроек транспортного средства. Например, система отображения может идентифицировать, что оператор запросил навигационные указания, такие как указания, как добраться до пункта назначения. В других примерах система отображения может автоматически идентифицировать режим поездки или режим парковки в ответ на выявление перемещения транспортного средства.
[0070] В ходе операции 1030 система отображения может принимать сенсорные входные данные касательно одного или более реальных объектов, которые находятся снаружи транспортного средства оператора. Объекты могут включать заметные географические объекты местности, такие как здание, дорога, мост, дорожный знак, другое транспортное средство, пешеход, животное, другие типы объектов или любая их комбинация.
[0071] В ходе операции 1040 система отображения может определять расстояние до объекта. Расстояние до объекта может быть основано, по меньшей мере частично, на сенсорных входных данных, принимаемых в ходе операции 1030, и/или на местоположении транспортного средства, идентифицированном в ходе операции 1010. В некоторых примерах сенсорные входные данные могут использоваться для дополнения и/или уточнения местоположения транспортного средства относительно объекта.
[0072] В ходе операции 1050 система отображения может отображать графическую информацию, связанную с объектом на первом фокусном расстоянии. Первое фокусное расстояние может совпадать или приблизительно соответствовать расстоянию до объекта, которое было определено в ходе операции 1040.
[0073] В ходе операции 1060 система отображения может обновлять сенсорные входные данные, принимаемые в ходе операции 1030, и/или местоположение транспортного средства, идентифицированное в ходе операции 1010. В некоторых примерах как объект, так и транспортное средство могут двигаться одновременно. В других примерах только одно из двух, объект или транспортное средство, может двигаться в любой отдельно взятый момент времени. Соответственно, обновленные сенсорные входные данные и/или местоположение транспортного средства могут использоваться для обновления относительного расстояния между транспортным средством и объектом.
[0074] В ходе операции 1070 система отображения может отображать обновленную графическую информацию на втором фокусном расстоянии. В некоторых примерах второе фокусное расстояние может соответствовать или совпадать с обновленным расстоянием между транспортным средством и объектом, определенным в ходе операции 1060. Система отображения может быть выполнена с возможностью обновления фокусного расстояния и отображения обновленной графической информации в режиме реального времени. В некоторых примерах один или более элементов графики могут отображаться на втором фокусном расстоянии, тогда как один или более других элементов графики отображаются на первом фокусном расстоянии. В других примерах часть объекта может параллельно отображаться на втором фокусном расстоянии, тогда как другая часть объекта отображается на первом фокусном расстоянии.
[0075] В ходе операции 1080 система отображения может отображать вспомогательную информацию на третьем фокусном расстоянии. Вспомогательная информация может включать скорость перемещения транспортного средства, местоположение транспортного средства, температуру, время, другие типы информации или любую их комбинацию. В некоторых примерах вспомогательная информация может в статичном режиме отображаться на третьем фокусном расстоянии, тогда как фокусное расстояние для графики, связанной с объектом, расположенным снаружи транспортного средства, может в динамическом режиме варьироваться с течением времени.
[0076] На фиг. 11 показан иллюстративный способ 1100 отображения генерируемой компьютером графики. В ходе операции 1110 входные данные могут приниматься от одного или более датчиков, таких как GNSS, инерционный датчик, камера, барометрический датчик, прибор для измерения интенсивности света, температурный датчик, другие типы датчиков или любая их комбинация.
[0077] В ходе операции 1120 положение транспортного средства может быть рассчитано и/или повторно рассчитано на основании, по меньшей мере частично, входных данных от одного или более датчиков.
[0078] В ходе операции 1130 расстояния до одной или более виртуальных плоскостей могут определяться и/или корректироваться на основании информации, связанной с окружением транспортного средства. Окружение транспортного средства может находиться под наблюдением одного или более датчиков, чтобы определять, например, местоположение одного или более реальных объектов вблизи транспортного средства.
[0079] В ходе операции 1140 графическая информация и/или графические изображения могут отображаться на одном или более фокусных расстояниях, соответствующих окружению транспортного средства и расстояниям до реальных объектов.
[0080] Упоминания о транспортном средстве в контексте данной заявки не должны пониматься как ограниченные только автомобилем, и в некоторых примерах одна или более из раскрытых в настоящем документе иллюстративных систем отображения могут быть выполнены с возможностью использования в автобусе, грузовике, мотоцикле, лодке, самолете, поезде, космическом летательном аппарате или в других типах транспортных средств. Кроме того, хотя в некоторых из приведенных примеров упоминается применение систем отображения в транспортном средстве, системы отображения также могут быть выполнены с возможностью использования в других типах устройств, систем, или случаев применения, включая устанавливаемый на голове ИЛС, мотоциклетный шлем, устройство виртуальной реальности, домашнюю систему мультимедийных развлечений, игровую систему и другие типы систем.
[0081] В случаях, когда пользователь может носить устанавливаемый на голове ИЛС, специальные очки или другие типы устройств, которые можно носить на себе, одно или более виртуальных изображений, предоставляемых пользователю, могут накладываться на изображения реальных объектов или иным образом сочетаться с ними, чтобы дополнять или усиливать пользовательское восприятие окружения, аналогично иллюстративным устройствам отображения, описанным в настоящем документе в контексте применения с лобовым стеклом транспортного средства.
[0082] После ознакомления с описанными и показанными в настоящем документе примерами, должно быть очевидно, что путем модификации компоновок и деталей можно получить другие примеры.

Изобретение относится к системам отображения виртуальной графики на индикаторе на лобовом стекле. Система индикации на лобовом стекле с переменной фокальной плоскостью содержит проекционное устройство для генерирования света, представляющего по меньшей мере один элемент виртуальной графики; матрицу изображений для проецирования света, представляющего по меньшей мере один элемент виртуальной графики, на по меньшей мере одну плоскость изображения; устройство отображения для отображения по меньшей мере одного элемента виртуальной графики на по меньшей мере одной плоскости изображения; и устройство преобразования для динамического изменения положения матрицы изображений относительно устройства отображения на основании заранее заданного рабочего параметра, чтобы в динамическом режиме варьировать фокусное расстояние между устройством отображения и по меньшей мере одной плоскостью изображения. Изобретение обеспечивает повышение качества отображения информации. 3 н. и 16 з.п. ф-лы, 13 ил.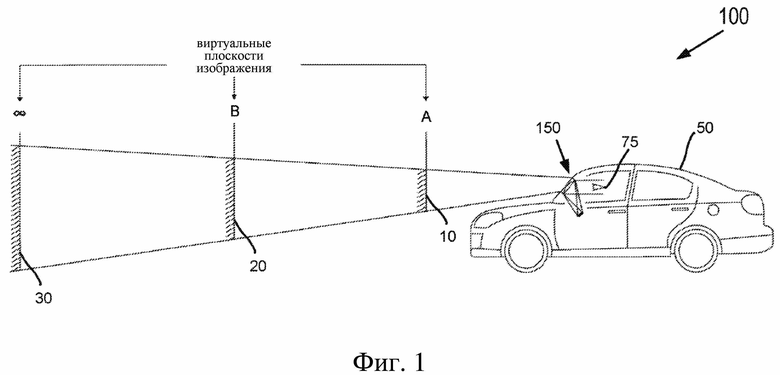
1. Система индикации на лобовом стекле, содержащая:
проекционное устройство для генерирования света, представляющего по меньшей мере один элемент виртуальной графики;
матрицу изображений для проецирования света, представляющего по меньшей мере один элемент виртуальной графики, на по меньшей мере одну плоскость изображения;
устройство отображения для отображения по меньшей мере одного элемента виртуальной графики на по меньшей мере одной плоскости изображения; и
устройство переноса для динамического изменения положения матрицы изображений относительно устройства отображения на основании, по меньшей мере частично, заранее заданного рабочего параметра, чтобы в динамическом режиме варьировать фокусное расстояние между устройством отображения и по меньшей мере одной плоскостью изображения, а также с возможностью варьирования в динамическом режиме угла наклона матрицы изображений на основании, по меньшей мере частично, рабочих параметров, при этом нижняя часть по меньшей мере одной плоскости изображения связана с первым фокусным расстоянием и при этом верхняя часть по меньшей мере одной плоскости изображения связана со вторым фокусным расстоянием, отличным от первого фокусного расстояния.
2. Система по п. 1, отличающаяся тем, что дополнительно содержит:
обрабатывающее устройство для управления проекционным устройством, матрицей изображений, устройством отображения, устройством переноса или их комбинацией.
3. Система по п. 2, отличающаяся тем, что дополнительно содержит:
оптическое устройство для фильтрации света, генерируемого проекционным устройством.
4. Система по п. 3, отличающаяся тем, что оптическое устройство расположено между проекционным устройством и матрицей изображений.
5. Система по п. 1, отличающаяся тем, что устройство отображения содержит голографическую пленку.
6. Система по п. 5, отличающаяся тем, что голографическая пленка содержит несколько коллиматоров.
7. Система по п. 1, отличающаяся тем, что матрица изображений содержит голографический фазово-амплитудный модулятор, выполненный с возможностью генерирования по меньшей мере одного фронта волны, представляющего по меньшей мере один элемент виртуальной графики.
8. Система по п. 1, отличающаяся тем, что устройство переноса содержит двигатель; и
при этом двигатель представляет собой электрический двигатель, линейный двигатель, двигатель постоянного тока, бесщеточный двигатель, шаговый двигатель, ультразвуковой пьезодвигатель, винтовой пьезодвигатель, серводвигатель, механический привод, магнитный выключатель, или датчик положения, или любую их комбинацию.
9. Система по п. 1, отличающаяся тем, что рабочие параметры включают параметры транспортного средства, дорожные параметры, или параметры оператора транспортного средства, параметры оператора или их комбинацию.
10. Система по п. 1, отличающаяся тем, что устройство переноса выполнено с возможностью корректирования матрицы изображений относительно по существу горизонтальной оси, чтобы варьировать горизонтальное положение по меньшей мере одной плоскости изображения.
11. Система индикации на лобовом стекле, содержащая:
проекционное устройство для генерирования света, представляющего несколько элементов виртуальной графики;
несколько матриц изображения для проецирования света, представляющего каждый из нескольких элементов виртуальной графики, на соответствующую одну из нескольких плоскостей изображения, при этом первая матрица изображений выполнена с возможностью корректирования проекции света, представляющего первый элемент виртуальной графики, на первой плоскости изображения согласно положению левого глаза оператора; и
при этом вторая матрица изображений выполнена с возможностью корректирования проекции света, представляющего второй элемент виртуальной графики, на второй плоскости изображения согласно положению правого глаза оператора.
устройство отображения для отображения каждого из нескольких элементов виртуальной графики на соответствующую одну из нескольких плоскостей изображения; и
несколько устройств переноса, соответствующих нескольким матрицам изображения, для динамического изменения положения каждой из нескольких матриц изображения относительно устройства отображения на основании, по меньшей мере частично, заранее заданного рабочего параметра.
12. Система индикации на лобовом стекле по п. 11, отличающаяся тем, что содержит:
обрабатывающее устройство для управления проекционным устройством, несколькими матрицами изображения, устройством отображения, несколькими устройствами переноса или их комбинацией.
13. Система индикации на лобовом стекле по п. 11, отличающаяся тем, что дополнительно содержит:
по меньшей мере одно оптическое устройство для фильтрации света, генерируемого проекционным устройством; при этом оптическое устройство расположено между проекционным устройством и несколькими матрицами изображения.
14. Система индикации на лобовом стекле по п. 11, отличающаяся тем, что каждая из нескольких матриц изображения содержит голографический фазово-амплитудный модулятор, выполненный с возможностью генерирования по меньшей мере одного фронта волны, представляющего по меньшей мере один из нескольких элементов виртуальной графики.
15. Система индикации на лобовом стекле по п. 11, отличающаяся тем, что каждое из нескольких устройств переноса содержит двигатель; и при этом двигатель представляет собой электрический двигатель, линейный двигатель, двигатель постоянного тока, бесщеточный двигатель, шаговый двигатель, ультразвуковой пьезодвигатель, винтовой пьезодвигатель, серводвигатель, механический привод, магнитный выключатель, или датчик положения, или любую их комбинацию.
16. Система индикации на лобовом стекле по п. 11, отличающаяся тем, что рабочие параметры включают параметры транспортного средства, дорожные параметры, или параметры оператора транспортного средства, параметры оператора или их комбинацию.
17. Система индикации на лобовом стекле по п. 11, отличающаяся тем, что по меньшей мере одно из нескольких устройств переноса выполнено с возможностью варьирования в динамическом режиме угла наклона по меньшей мере одной из нескольких матриц изображения на основании, по меньшей мере частично, рабочих параметров.
18. Система индикации на лобовом стекле по п. 11, отличающаяся тем, что дополнительно содержит:
камеру для определения положения левого глаза или положения правого глаза.
19. Способ индикации на лобовом стекле, включающий:
определение рабочих параметров транспортного средства;
отображение по меньшей мере одного элемента виртуальной графики на первом фокусном расстоянии на основании, по меньшей мере частично, рабочих параметров транспортного средства;
обновление рабочих параметров транспортного средства; и
обновление отображения по меньшей мере одного элемента виртуальной графики на втором фокусном расстоянии на основании, по меньшей мере частично, обновленных рабочих параметров транспортного средства,
отображение вспомогательной информации на третьем фокусном расстоянии одновременно с отображением по меньшей мере двух элементов виртуальной графики.
| US 2009005961 A1, 01.01.2009 | |||
| US 5510983 A, 23.04.1996 | |||
| US 2016003636 A1, 07.01.2016 | |||
| JPS 60192912 A, 01.10.1985 | |||
| US 4998784 A, 12.03.1991 | |||
| US 2013222384 A1, 29.08.2013 | |||
| WO 2015029598 A1, 05.03.2015. |

