Изобретение относится к средствам индукционного нагрева металлических деталей в виде стержней, трубок и др. и предназначено для использования в установках для нагрева деталей, требующих повышенной мощности и возможности регулирования мощности и температуры в нескольких отдельных зонах детали.
Известно, устройство индукционного нагрева по патенту RU №2525851, 2010 г., по п. 15 формулы изобретения. Устройство - аналог состоит из одного источника питания, совокупности индукторов, подключенных к одному источнику питания, сравнительных блоков с заданными параметрами, каждый сравнивающий блок соединен с блоком обработки, выполненным с возможностью генерирования команд управления на регулировку тока или напряжения источника питания.
Недостатком аналога является низкая энергоэффективность устройства, так как в нем не учитываются взаимовлияния источников магнитосвязанных индукторов. Так же недостатком является сложность построения системы управления, которая выполняет множество математических вычислений, даже при отсутствии необходимости контроля всего температурного профиля детали, когда достаточным является контроль температуры в некоторых точках детали.
Известно так же устройство по патенту RU №2231905, 2002 г. Данный аналог состоит из разделительного конденсатора, подключенного к источнику питания постоянного тока, и инверторных ячеек с индуктором индукционной установки. Инверторная ячейка содержит управляющие ключи, разделительные конденсаторы, подключенные к инверторной ячейке. В каждую инверторную ячейку включен компенсирующий конденсатор, соединенный с индуктором. Так же в инверторную ячейку включен низкочастотный дроссель.
Недостатком аналога является необходимость использования преобразователей на основе полумостового инвертора, что повышает токовую нагрузку элементов схемы, а это в свою очередь приводит к снижению общего КПД системы. Так же в указанном устройстве не учитывается взаимное влияние источников питания близкорасположенных индукторов, что приводит к повышению энергозатрат на проведение нагрева детали.
Наиболее близким по своей технической сущности аналогом (прототипом) к заявленному устройству является известное устройство высокочастотного индукционного нагрева по патенту RU №2256303, 2006 г.
Ближайший аналог состоит из секционированного индуктора, каждая секция которого запитана от одного источника высокочастотного питания. Питание каждой секции обеспечивается соответствующим ей согласующим трансформатором, соединенным источником питания. Резонансный контур образован в каждой секции индуктора ею и резонансной емкостью.
Недостатком ближайшего аналога является нарушение заданного температурного профиля нагреваемой детали, ввиду того, что в устройстве используется только один источник питания и, следовательно индивидуальная регулировка мощности в отдельной зоне детали невозможна без изменения мощности в других. К тому же из-за разбросов номиналов отдельных компенсационных емкостей индуктора возможно появление нескольких частотных резонансов, в следствии чего будет наблюдаться малопрогнозируемый перекос мощностей между отдельными секциями индуктора, что приводит к искажению требуемого температурного профиля нагреваемой детали.
Целью изобретения является разработка устройства индукционного нагрева, обеспечивающего снижение энергозатрат при нагреве детали многомодульными индукционными нагревателями с близкорасположенными индукторами и повышение точности соответствия реализуемого температурного профиля при нагревании детали желаемому температурному профилю.
Указанный технический результат при использовании заявленного устройства достигается тем, что в устройстве индукционного нагрева, содержащем N≥2 индукторов, подключенных к источнику питания и в полость которых введена деталь, подлежащая нагреву, введены N раздельных источников питания (РИП). Питающие входы n-го индуктора, где n=1, 2…N, подключены к питающим выходам n-го РИП, подключенных к внешней сети питания, и являющимися питающими входами выпрямителя n-го РИП. Питающие выходы выпрямителя подключены к питающим входам n-го инвертора. Силовые выходы инвертора подключены к контрольным входам регулятора помехоустойчивой расстройки инвертора (РПРИ). Управляющие выходы РПРИ по каналу помехи собственного инвертора подключены к соответствующим входам регулировки по каналу помехи инвертора. Входы-выходы связи с РИП магнитосвязанных индукторов являются входами-выходами n-го РИП, которые подключены к соответствующим входам-выходам всех РИП. Выходы РПРИ через компенсатор являются выходами РИП.
РПРИ состоит из управляющего процессора (УП), снабженного портами П1, П2 «порты контроля биений тока», П3, П4 «порты контроля амплитуды тока индуктора», П5, П6 «порты контроля фазы между током индуктора и выходным напряжением инвертора» УП и подключены соответственно к выходам A1, А2 «выходы передачи амплитуды биений тока индуктора» детектора амплитуды биений тока (ДАБТ), к выходам Д1, Д2 «выходы передачи амплитуды тока индуктора» и детектора тока индуктора ДТИ и к выходам Ф1, Ф2 «выходы передачи величины фазы» фазового детектора (ФД), входы Ф3, Ф4 «контрольные входы тока индуктора» подключены к выходам Д5, Д6 «выходы передачи сигнала тока индуктора» ДТИ. Входы Д3, Д4 «контрольные входы» ДТИ подключены соответственно к выходам T1, Т2 «выходы передачи преобразованного тока индуктора» датчика тока (ДТ) и к входам A3, А4 «контрольные входы» ДАБТ. Входы Ф5, Ф6 «контрольные входы выходного напряжения инвертора» ФД являются одновременно контрольными и через компенсатор силовыми выходами источника питания.
Порты П7, П8 «порты воздействия по каналу помехи собственным инвертором» и П9, П10 «порты связи с инверторами магнитосвязанных индукторов» УП являются соответственно выходами 1.5.3, 1.5.4 «выходы регулировки по каналу помехи собственным инвертором» и входами-выходами 1.7, 1.8 «входы-выходы связи с РИП магнитосвязанных индукторов».
Благодаря указанной новой совокупности существенных признаков в заявленном устройстве достигается сохранение индуктивного характера коммутации силовых ключей транзистора в условиях взаимонаводок раздельных источников питания магнитосвязанных индукторов, что обеспечивает снижение энергозатрат и более высокую точность реализации заданного температурного профиля, т.е. достигается сформулированный технический результат при использовании заявленного устройства.
Заявленное устройство поясняется чертежами, на которых показаны:
на фиг. 1 - Общая структурная схема устройства;
на фиг. 2 - Схема регулятора помехоустойчивой расстойки инвертора (РПРИ)
на фиг. 3 - Схема компенсатора
на фиг. 4 - Схема инвертора
на фиг. 5 - Алгоритм работы управляющего процессора (УП) РПРИ
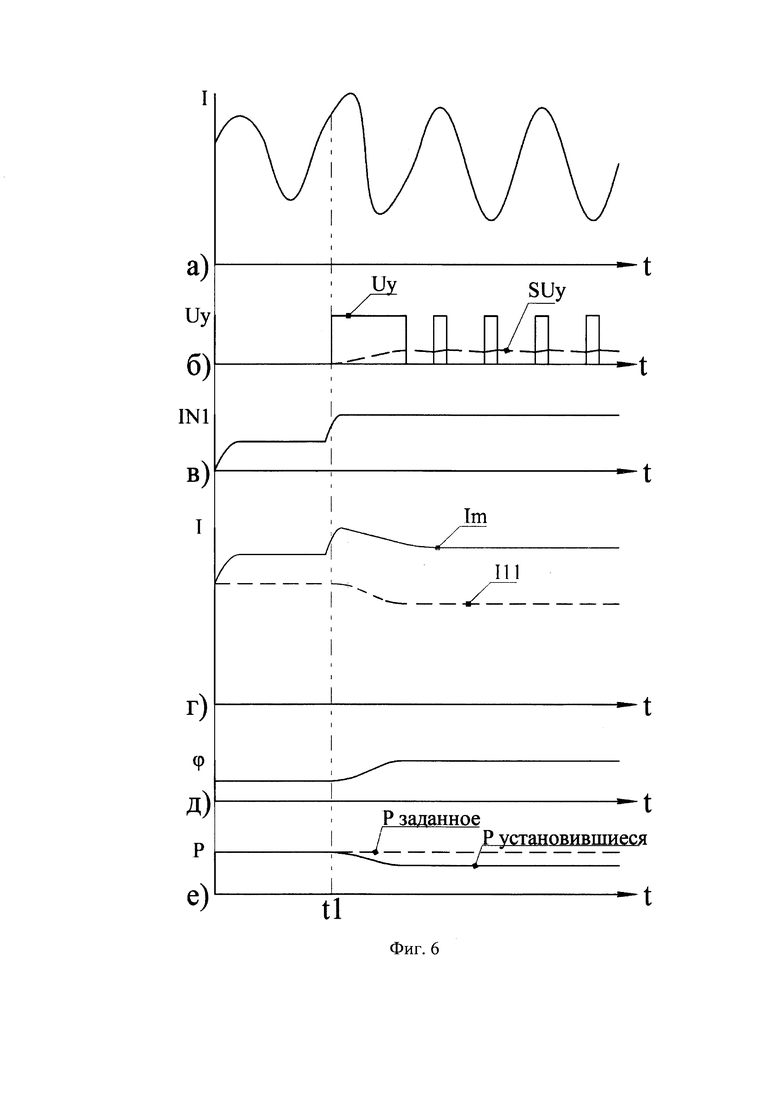
на фиг. 6 - Эпюры токов, напряжений и мощности, поясняющих работу раздельного источника питания
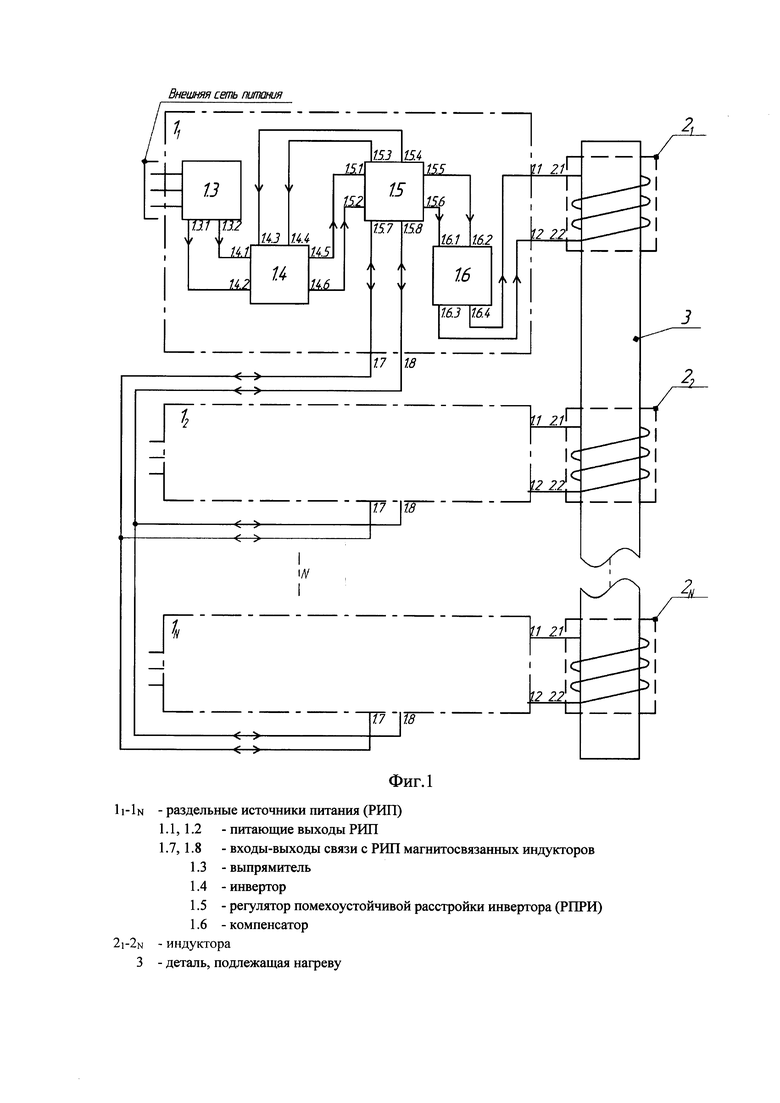
Заявленное устройство, показанное на фиг. 1, состоит из N≥2 раздельных источников питания (РИП) 11-1N. Питающие выходы 1.1 и 1.2 n-го РИП 1n, где n=1, 2…N, подключены к питающим входам 2.1, 2.2 n-го индуктора 2n. В полости индукторов 21-2N установлена деталь 3, подлежащая нагреву.
Причем n-й РИП 1n состоит из выпрямителя 1.3, питающие входы которого являются питающими входами n-го РИП 1n, которые в свою очередь подключены к внешней сети питания. Питающие выходы 1.3.1, 1.3.2 выпрямителя 1.3 подключены к питающим входам 1.4.1, 1.4.2 инвертора 1.4. Силовые выходы 1.4.5, 1.4.6 инвертора 1.4 подключены к контрольным входам 1.5.1, 1.5.2 регулятора помехоустойчивой расстройки инвертора (РПРИ) 1.5. Управляющие выходы 1.5.3, 1.5.4 РПРИ 1.5 по каналу помехи собственного инвертора подключены соответственно к входам 1.4.3, 1.4.4 регулировки по каналу помехи инвертора 1.4. Входы-выходы 1.5.7, 1.5.8 регулировки по каналу помехи инверторов магнитосвязвязанных индукторов РПРИ 1.5 являются входами-выходами 1.7, 1.8 n-го РИП 1n, которые подключены к соответствующим входам-выходам 1.7, 1.8 всех РИП. Выход 1.5.5 и выход 1.5.6 РПРИ 1.5 через компенсатор 1.6 подключены к силовым выходами 1.1, 1.2 РПИ 1n.
Выпрямитель 1.3, входящий в состав каждого из РИП, обеспечивает преобразование входного переменного сетевого напряжения в постоянное выходное на выходах 1.3.1, 1.3.2, что необходимо для работы инвертора 1.4. Как правило, в мощных источниках питания предпочтительнее использовать 3-х фазные мостовые схемы выпрямления. При этом схемы таких выпрямителей известны и описаны, например, в книге (Мелешин В.И. Транзисторная преобразовательная техника. М.: Техносфера, 2005. С. 190-193).
Инвертор 1.4, входящий в состав каждого из РИП, обеспечивает генерацию на выходе переменного напряжения и тока для выделения в нагрузке мощности равной заданной. Инвертор может быть реализован различным образом, например, как показано на фиг. 4. Где входы питания инвертора постоянным током 1.4.1 и 1.4.2 через датчик постоянного тока 1.4.10 подключены к фильтрующему конденсатору С1. В свою очередь фильтрующий конденсатор С1 подключен к силовым контактам соответствующих транзисторных ячеек 1.4.16…1.4.19. Транзисторные ячейки 1.4.16…1.4.19 образуют транзисторный мост, выход которого через конденсатор развязки по постоянному току С2 подключен к входам согласующего трансформатора 1.4.24, в свою очередь, выходы которого являются силовыми выходами инвертора 1.4.5 и 1.4.6.
Фильтрующий конденсатор С1 (фиг. 4) обеспечивает постоянство входного тока инвертора 1.4, и его номинал выбран из условия, чтобы на удвоенной рабочей частоте работы инвертора модуль емкостного сопротивления фильтра был, по крайней мере, на порядок меньше активного сопротивления нагрузки. С1 представляет промышленно изготавливаемый конденсатор металлопленочного или электролитического типа, номинал которого находится в пределах от 10 до 1000 мкФ.
Датчик постоянного тока 1.4.10 (см. фиг. 4) может быть реализован на основе серийно изготавливаемом промышленностью датчика измерения тока на эффекте Холла серии ДТХ или подобных, через который проходит питающая постоянным током шина инвертора, и выходом, который относительно «земляной» площадки подключен к входу интегратора в канале регулировки по мощности 1.4.8. При этом при известности и постоянстве входного постоянного напряжения сигнала с датчика постоянного тока достаточно для контроля активной мощности инвертора.
Интегратор в канале регулировки по мощности 1.4.8 (см. фиг. 4) одним из входов относительно «земляной» площадки подключен к датчику постоянного тока 1.4.10, а другим к источнику уставки выходной активной мощности 1.4.9. Выход интегратора через диод 1.4.23 подключен на вход генератора, управляемого напряжением (ГУН) 1.4.15. Через диод 1.4.22 на вход ГУН 1.4.15 подключается интегратор в канале регулировки по помехе, входы которого в свою очередь являются входами регулировки по каналу помехи 1.4.3, 1.4.4 инвертора 1.4. Диоды 1.4.22 и 1.4.23 обеспечивает установление на входе ГУН наибольшего выходного напряжения одного из интеграторов. Выход ГУНа через логические элементы «И» 1.4.20 и «И-НЕ» 1.4.21 подключены к индивидуальным драйверам 1.4.11…1.4.14, соответствующих транзисторных ячеек 1.4.16…1.4.19. Логические элементы обеспечивают противофазность сигналов противоположных диагоналей транзисторного моста. Таким образом обеспечивается усиление выходного сигнала ГУНа. Выходное напряжение транзисторного моста через разделительный конденсатор С2 и согласующий трансформатор 1.4.24 подается на силовые выходы инвертора 1.4.5, 1.4.6, тем самым обеспечивая связь воздействующих параметров управления с частотой выходного напряжения инвертора.
При этом рабочий частотный диапазон ГУНа 1.4.15 (см. фиг. 4) устанавливается таковым, что в него входит частота на которой в контуре, образованном компенсатором 1.6 и непосредственно подключенным индуктором 2n (фиг. 1), выделяется заданная мощность.
Разделительный конденсатор С2 инвертора 1.4 (фиг. 4) обеспечивает развязку транзисторного моста, образованного транзисторами 1.4.16…1.4.19 по постоянной составляющей напряжения, исключая насыщение сердечника согласующего трансформатора 1.4.24, представляет из себя промышленно изготавливаемый конденсатор металлопленочного типа, номинал которого должен быть таковым, чтобы на рабочей частоте инвертора модуль его реактивного сопротивления, по крайней мере, на порядок был меньше активного сопротивления индуктора и находился в пределах от 100 до 500 мкФ.
Согласующий трансформатор 1.4.24 (фиг. 4) обеспечивает согласование номинальных параметров инвертора с параметрами нагрузки. При этом расчет конструкции трансформаторов известен и представлен, например, в книге (Вдовин С.С. Проектирование импульсных трансформаторов. Л.: Энергия, 1971, С. 101-119).
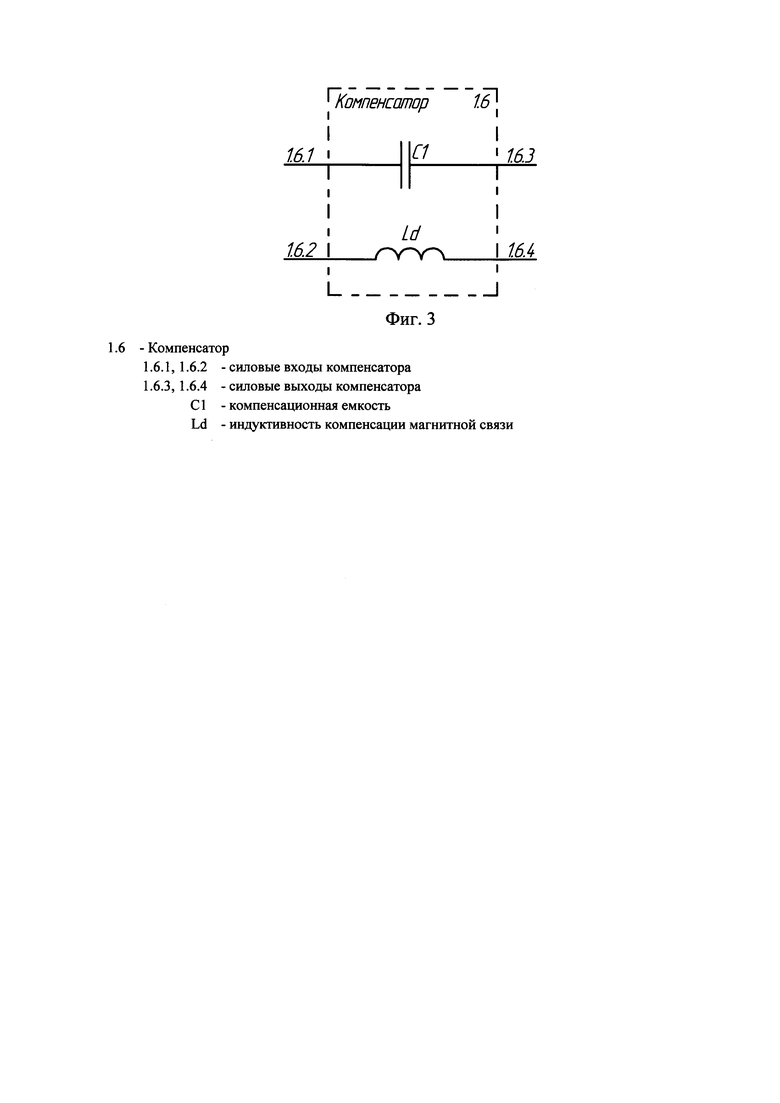
Компенсатор 1.6 обеспечивает компенсацию реактивной составляющей сопротивления индуктора и компенсацию магнитной связи магнитосвязанных индукторов. Компенсатор 1.6 может быть реализован различным образом, например, как показано на фиг. 3. Где силовые входы 1.6.1 и 1.6.2 через соответственно компенсационную емкость Ск и индуктивность компенсации магнитной связи Ld соединены с силовыми выходами 1.6.3, 1.6.4 компенсатора. Номиналы элементов компенсатора 1.6 (фиг. 3) выбирают такими, чтобы резонансная частота контура, образованного последовательно соединененными компенсатором и индуктором (далее контур) рассчитанная по известной формуле определения резонансной частоты (Бычков Ю.А. Основы теоретической электротехники: учебное пособие 2-е изд / Ю.А. Бычков, В.М. Золотницкий, Э.П. Чернышев. - СПб.: Изд-во «Лань», С.131), во-первых, отличалась по крайней мере на 10% от расчетной резонансной частоты контура магнитосвязанного индуктора в случае продольно чередующихся над деталью индукторов и, во-вторых, входила в рабочий частотный диапазон ГУНа, то есть самого инвертора. В случае концентрически чередующихся индукторов, так как при такой конфигурации магнитная связь достигает максимальных значений, резонансные частоты контуров магнитосвязанных индукторов должны отличаться по крайней мере (в 1,4 раза. Это обусловлено минимизацией взаимонаводимых наводок магнитосвязанных контуров, основанной на фильтрующих свойствах контуров. Индуктивность компенсации связи Ld компенсатора 1.6 представляет из себя воздушную катушку индуктивности, номинал которой находится в пределах реализумых габаритов мощных индукционных систем (от 1 до 30 мкГн) и изготавливается из отожженной медной трубки или высокотемпературного провода. При этом расчет конструкции индуктивных катушек известен и представлен, например, в книге (Калантаров П.Л., Цейтлин Л.А. Расчет индуктивностей: справочная книга. - 3-е изд. Л.: Энергоатомиздат, 1986 С. 257-271). Компенсационная емкость компенсатора С1 представляет из себя промышленно изготавливаемый конденсатор металлопленочного типа, номинал которой находится в пределах от 1 до 500 мкФ. Столь большой диапазон номинал компенсационной емкости обусловлен множеством технологических задач, решаемых заявленным техническим решением.
Индуктора 21-2n (фиг. 1) охватывают поверхность нагреваемого объекта, при этом каждый из индукторов обеспечивает нагрев собственной зоны детали, которая расположена в его полости. Индуктор может быть изготовлен из отожженной медной трубки, высокотемпературного провода или медной ленты, при этом расчет конструкции индукторов известен и представлен, например, в книге (Слухоцкий А.Е., Рыскин С.Е. Индукторы для индукционного нагрева. Л.: Энергия, 1974, С. 86-102).
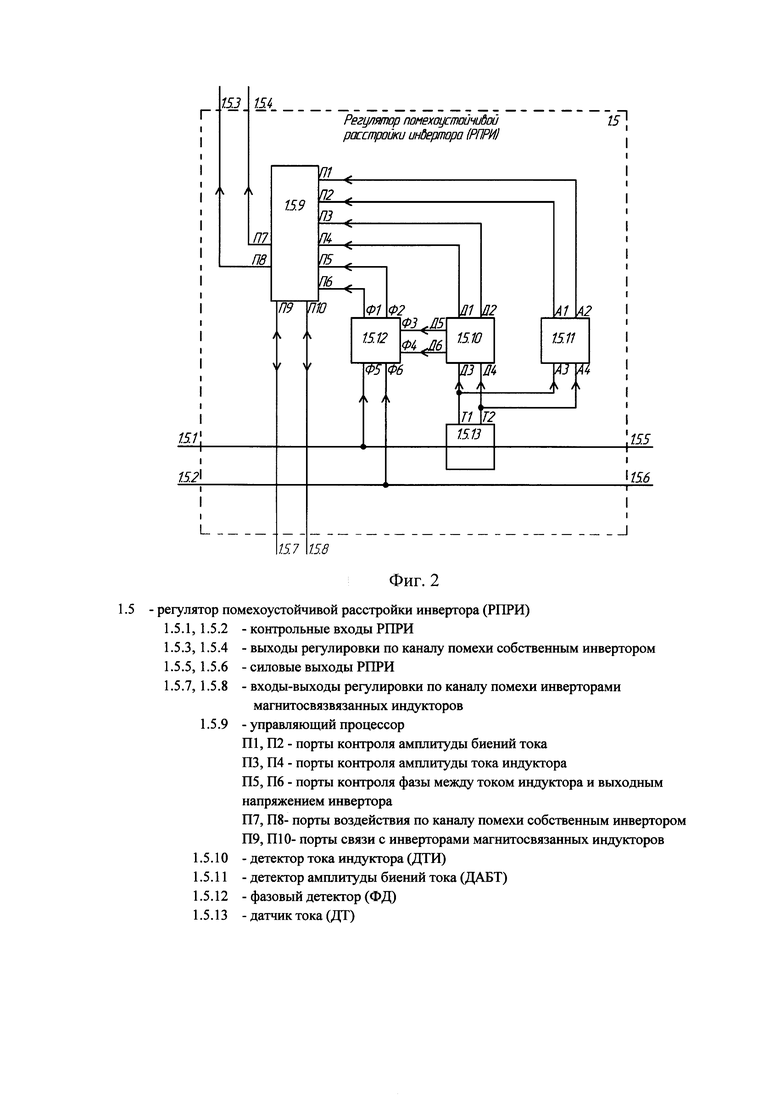
РПРИ 1.5, входящий в состав каждого РИП, предназначен для обеспечения индуктивного характера коммутации собственного инвертора и инверторов магнитосвязанных индукторов в условиях взаимоноводок РИП магнитосвязанных индукторов. Его схема может быть реализована различным образом, например как показано на фиг. 2. РПРИ 1.5 состоит из управляющего процессора (УП) 1.5.9, предназначенного для контроля рабочих параметров РИП и выработки управляющего воздействия, детектора амплитуды биений тока (ДАБТ) 1.5.11, предназначенного для измерения амплитуды биений тока, вызванных наводками РИП магнитосвязанных индукторов, детектора тока индуктора (ДТИ) 1.5.10, предназначенного для измерения амплитуды тока индуктора, фазового детектора (ФД) 1.5.12, предназначенного для измерения фазы между током индуктора и выходным напряжением инвертора, и датчика тока (ДТ) 1.5.13, предназначенного для измерения тока индуктора.
Порты П1, П2 «порты контроля биений тока», П3, П4 «порты контроля амплитуды тока индуктора», П5, П6 «порты контроля фазы между током индуктора и выходным напряжением инвертора» УП 1.5.9 подключены соответственно к выходам A1, А2 «выходы передачи амплитуды биений тока индуктора» ДАБТ 1.5.11, к выходам Д1, Д2 «выходы передачи амплитуды тока индуктора» ДТИ 1.5.10 и к выходам Ф1, Ф2 «выходы передачи величины фазы» ФД 1.5.12, входы Ф3, Ф4 «контрольные входы тока индуктора» ФД 1.6.12 подключены к выходам Д5, Д6 «выходы передачи сигнала тока индуктора» ДТИ 1.5.10, входы Д3, Д4 «контрольные входы» ДТИ 1.5.10 подключены соответственно к выходам T1, Т2 «выходы передачи преобразованного тока индуктора» датчика тока ДТ и к входам A3, А4 «контрольные входы» ДАБТ 1.5.11, входы Ф5, Ф6 «контрольные входы выходного напряжения инвертора» ФД являются одновременно контрольными 1.5.1, 1.6.2 и через компенсатор 1.6 силовыми выходами 1.1, 1.2 источника питания 1n. Порты П7, П8 «порты воздействия по каналу помехи собственным инвертором» и П9, П10 «порты связи с инверторами магнитосвязанных индукторов» УП являются соответственно выходами 1.5.3, 1.5.4 «выходы регулировки по каналу помехи собственным инвертором» и входы-выходы 1.7, 1.8 «входы-выходы связи с РИП магнитосвязанных индукторов».
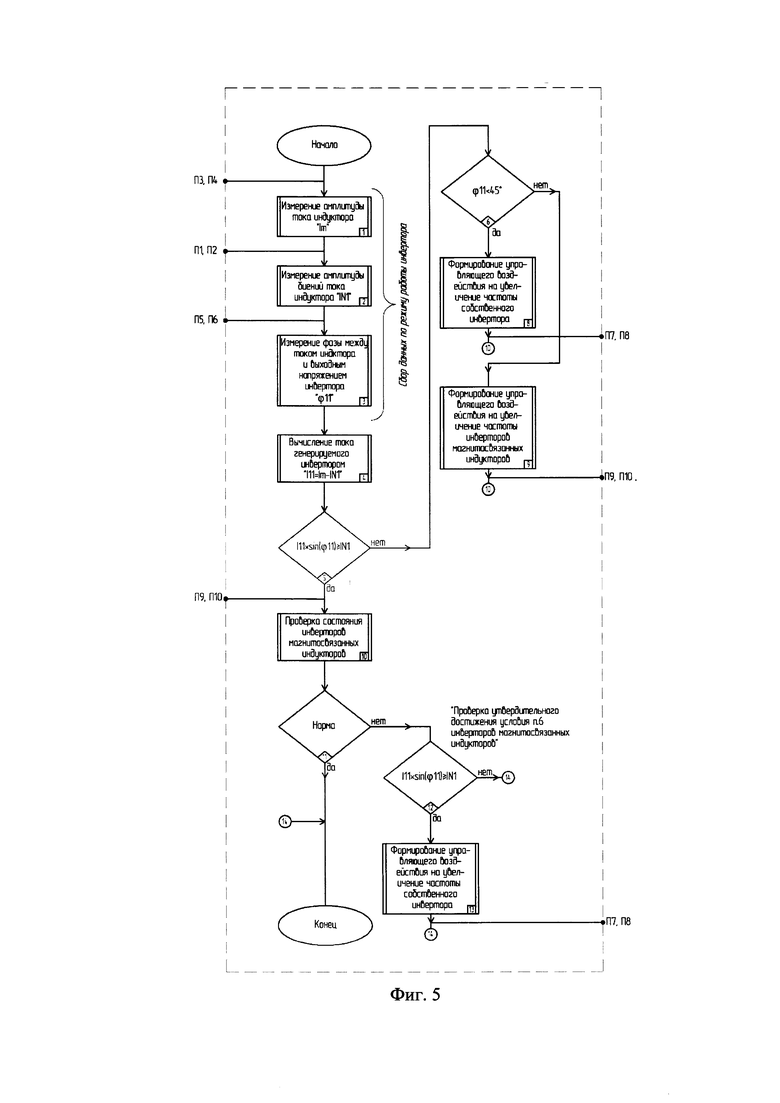
Управляющий процессор может быть выполнен в виде микроконтроллера, блок схема, поясняющая работу которого представлена на фиг. 5.
Детектор тока (ДТ) индуктора 1.5.11 РПРИ 1.5 предназначен для детектирования максимального значения тока индуктора и передачи этого значения на УП. При этом ДТ может быть выполнен различным образом, например, в виде однофазного мостового выпрямителя с емкостным фильтром, схема которого представлена и широко рассмотрена в (Мелешин В. И. Транзисторная преобразовательная техника. М: Техносфера, 2005. С. 204). При этом входы ДЗ, Д4 детектора тока индуктора одновременно будут являться выходами Д5, Д6, которые, в свою очередь, подключаются к входам Ф3, Ф4 фазового детектора 1.5.12.
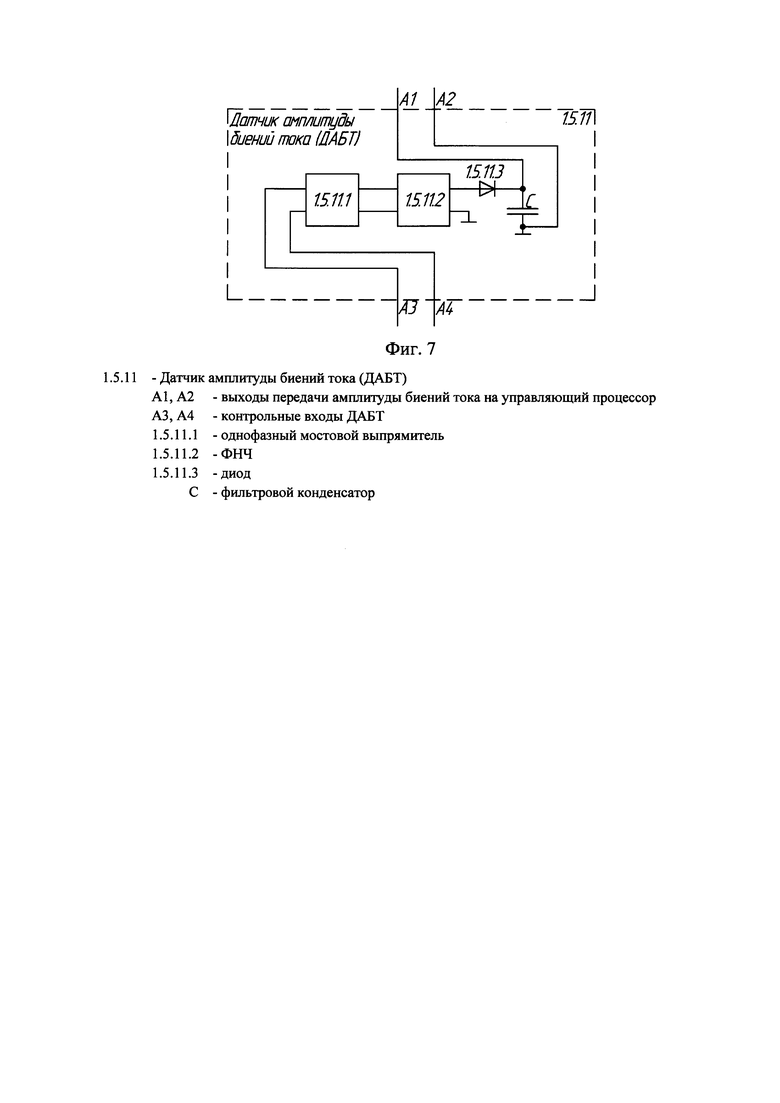
Детектор амплитуды биений тока 1.5.11 (ДАБТ) предназначен для детектирования амплитуды биений тока индуктора и передачи данного значения на УП. ДАБТ может быть выполнена различным образом, например, как показано на фиг. 7. Где ДАБТ состоит из однофазного мостового выпрямителя 1.5.11.1, входы которого являются контрольными входами A3, А4 ДАБТ. Выход выпрямителя подключается к входу полосового фильтра (ПФ) 1.5.11.2. Выход ПФ 1.5.11.2 через диод подключатся к фильтрующей емкости С и выходам передачи амплитуды биений тока A1, А2 ДАБТ.
Однофазный мостовой выпрямитель 1.5.11.1 предназначен для выделения в сигнале тока индуктора спектральной составляющей амплитуды биений. При этом при рассмотрении спектра сигнала, являющегося суммой нескольких гармонических колебаний - в нем будет отсутвствовать в явном виде, как таковая, амплитуда биений и будут лишь наблюдаться спектральные составляющие отдельно каждой гармонической составляющей. Конечно же, можно было бы использовать исключительно полосовой фильтр отсекающий гармоническую составляющую на частоте работы инвертора, однако в таком случае требовалась постоянная подстройка фильтра, что бы усложнило настройку, работу и запуск представленного изобретения. Мостовой выпрямитель широко известен и может быть реализован различным образом, например, схема которого показана в книге (Мелешин В.И. Транзисторная преобразовательная техника. М.: Техносфера, 2005. С. 190-193).
Полосовой фильтр 1.5.11.2 (фиг. 7) предназначен для фильтрации постоянной составляющей выходного напряжения выпрямителя и частот равных и выше рабочих частот инвертора и инверторов магнитосвязанных индукторов. Таким образом на выходе полосового фильтра 1.5.11.2 будет наблюдаться сигнал биений тока индуктора. Выход полосового фильтра через диод 1.5.11.3 подключен к фильтрующей емкости С, предназначенных для фиксации амплитудного значения биений, и именно этот сигнал через выход ДАБТ подается на УП. Полосовой фильтр может быть реализован различным образом, например, как показано в книге (Волович Г.И. схемотехника аналоговых и аналого-цифровых электронных устройств. 2-е изд. - М.: Додэка XXI. 2007 С. 100-101).
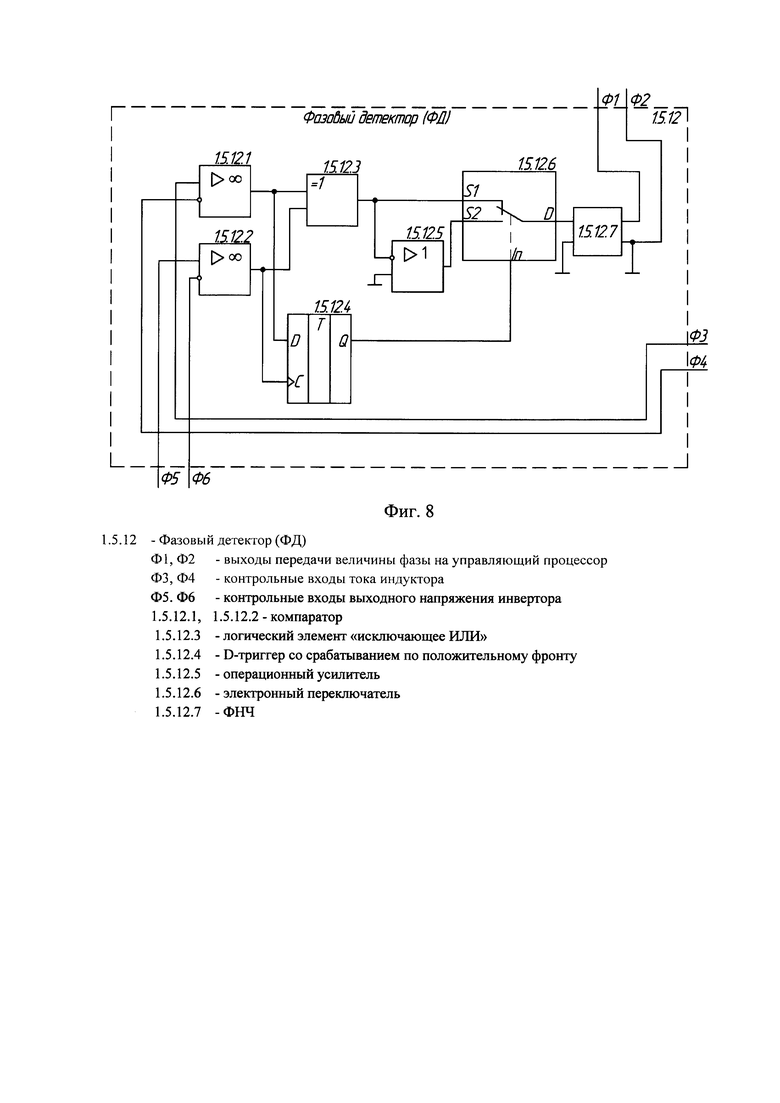
Фазовый детектор (ФД) 1.5.12 предназначен для детектирования фазы между током индуктора и выходным напряжения инвертора 1.4. Причем силовые выходы инвертора подключается к контрольным входам выходного напряжения инвертора Ф5, Ф6 ФД, а сигнал выходного тока инвертора через детектор тока индуктора 1.5.10 подключается к контрольным входам тока индуктора Ф3, Ф4 (см. фиг. 2). ФД может быть реализован различным образом, например, так, как показано на фиг. 8. Где ФД входы Ф3, Ф4 подключены к входам компаратора 1.5.12.1, а входы Ф5, Ф6 подключены к входам компаратора 1.5.12.2.
Компараторы 1.5.12.1 и 1.5.12.2 (фиг. 8) предназначены для детектирования момента перехода через ноль сигнала соответственно тока и напряжения. В момент перехода сигнала через «ноль» в положительное значение компараторы мгновенно меняют свое выходное напряжение с нулевого на положительное, что позволяет корректно детектировать сигнал логическим элементам ФД «исключающее ИЛИ» 1.5.12.3 и D-триггеру со срабатыванием по положительному фронту 1.5.12.4. Причем входы логических элементов «исключающее ИЛИ» 1.5.12.3 и D-триггера со срабатыванием по положительному фронту подключены к выходам компараторов 1.5.12.1 и 1.5.12.2. Выход 1.5.12.3 подключен к первому входу электронного переключателя 1.5.12.6, и через инвертирующий операционный усилитель с единичным коэффициентом усиления 1.5.12.5 к второму входу электронного перключателя 1.5.12.6. Выход D-триггера со срабатыванием по положительному фронту подключен к управляющему входу электронного переключателя. Выход электронного переключателя 1.5.12.6 подключен к входу ФНЧ 1.5.12.7. выходы которого являются выходами Ф1, Ф2 ФД.
Логический элемент «исключающее ИЛИ» 1.5.12.3 (фиг. 8) предназначен для выработки выходного сигнала в момент времени, когда один из сигналов тока или напряжения с компараторов соответственно 1.5.12.1, 1.5.12.2 больше нуля или равен «логической» единице, таким образом при прохождении через ФНЧ данный сигнал может быть трактован, как фаза между током индуктора и выходным напряжением инвертора в величинах напряжения.
D-триггер со срабатыванием по положительному фронту 1.5.12.4 выступает в роле детектора емкостного рассогласования, то есть момента времени, когда фаза принимает отрицательное значение. На вход синхронизации поступает сигнал от компаратора 1.5.12.2, на вход триггера поступает сигнал от компаратора 1.5.12.1, то есть компараторов, детектирующих переход через ноль сигналов соответственно напряжения и тока. При переходе выходного напряжения компаратора 1.5.12.2 из «0» в «1», то есть напряжения, при индуктивном рассогласовании инвертора, т.к. в это время сигнал тока равен логическому «0» - выходной сигнал D-триггера равен логическому «нулю». Однако при емкостном рассогласовании в момент перехода сигнала напряжения из «0» в «1» на входе D-тригтера уже имеется «1» сигнала тока, что переводит выходной сигнал D-триггера в логическую «1», что в свою очередь приводит к переключению 1-го входа электронного переключателя 1.5.12.6 на второй. При переключении входов электронного переключателя с первого на второй на вход ФНЧ 1.5.12.7 начинает поступать сигнал от инвертирующего операционного усилителя 1.5.12.5 отрицательной полярности, что приводит к снижению выходного сигнала ФНЧ, относительно текущего момента времени. Тем самым производится измерение фазы с учетом, как индуктивного рассогласования инвертора, так и емкостного.
Датчик тока 1.5.13 может быть реализован на основе серийно изготавливаемом промышленностью датчике измерения тока на эффекте Холла серии ДТХ или подобных, через который проходит выходная шина инвертора, и выходом, который подключен к входу компаратора 1.5.12.2.
Аналоговый переключатель 1.5.12.6, предназначен для подачи на вход ФНЧ импульсов положительной полярности от логического элемента исключающее ИЛИ» 1.5.12.3 при индуктивном рассогласовании инвертора, то есть положительного значения фазы и импульсов отрицательной полярности на вход ФНЧ при емкостном рассогласовании инвертора. При этом Аналоговый переключатель может быть реализован, например, в виде серийно изготавливаемой промышленностью микросхемы ADG419BNZ.
Заявленное устройство работает следующим образом. Определяют необходимый температурный профиль детали, например, как показано в работе (Демидович В.Б., Чмиленко Ф.В., Ситька П.А., Андрушкевич В.В., Перевалов Ю.Ю. Модульные индукционные установки для непрерывного нагрева заготовок перед обработкой давлением. Известия СПбГЭТУ «ЛЭТИ». - 2016. - №9. - С. 34-37). Формирование общего температурного профиля детали осуществляется за счет нагрева индивидуальных зон детали, расположенных внутри отдельных индукторов. При этом для для точного контроля, удержания или регулировки температуры питание индукторов следует осуществлять от отдельных собственных источников питания, вплоть до того, что на определенных стадиях нагрева требуется снятие мощности с отдельных зон детали с выключением их источников. Расчет необходимой мощности, которую необходимую подавать в отдельный индуктор для достижения необходимой температуры может быть рассчитан, например, как показано в книге (Слухоцкий А.Е., Рыскин С.Е. Индукторы для индукционного нагрева. Л.: Энергия, 1974, С. 42-47). При этом заявленное устройство позволяет разделить зоны нагрева на меньшие, для достижения общей необходимой мощности с помощью нескольких отдельных РИП. Возможно так же автоматическое установление необходимой температуры при введении в инвертор цепи обратной связи по температуре, которой на фиг. 1 не изображено, однако построенной тем же образом, как и канал регулировки по мощности. Сигнал обратной связи может быть снят с поверхности детали, например, с помощью контактных датчиков температуры (термопар). Установление необходимой мощности осуществляется с помощью у ставки по мощности 1.4.9 для каждого инвертора 1.4 индивидуально.
Все РИП 1 (фиг. 1) выполнены идентично и работают следующим образом. Частотный диапазон генаратора, управляемого напряжением (ГУН) 1.4.15 в данном случае настроен таким образом, что его нижняя рабочая частота соответствует той частоте, на которой инвертор выдает мощность равную заданной, и которая ниже резонансной. В таком режиме РИП работает длительное время. В «0» момент времени включается РИП магнитосвязанного индуктора. Отражается это появлением биений амплитуды тока рассматриваемого РИП (фиг. 6а), вызванных наведенными от магнитосвязанного индуктора токами. Что так же проявляется появлением сигнала от ДАБТ 1.5.11 (фиг. 6в). При этом расчетный УП 1.5.9 ток «I11» (фиг. 6г), вызванного собственным инвертором 1.4 РИП отличается от абсолютной амплитуды тока индуктора «Im» (фиг. 6 г), сигнал которого поступает от ДТ 1.5.10 на УП 1.5.9. Однако условие 5 (фиг. 5), алгоритма по которому работает УП 1.5.9 (фиг. 2), не выполняется, следовательно, наведенные токи не оказывают влияния на устойчивую работу инвертора. При этом наблюдается плавное увеличение амплитуды биений тока (фиг б.а), следовательно, сигнал с датчика амплитуды биений тока (фиг. 6.в) начинает возрастать. В момент времени t1 наступает момент, где происходит невыполнение условия 5 (фиг. 5), характеризующиеся невыполнением соотношения «I11⋅sin(ϕ11)≥IN1», где I11 - расчетный ток индуктора, создаваемый напряжением инвертора рассчитывается УП в пункте 4 (фиг. 5), ϕ11 - фаза между током индуктора и выходным напряжением инвертора, записывается в память УП в пункте 3 (фиг. 5), IN1 - величина амплитуды биений тока, записывается в память УП в пункте 2 (фиг. 5). Невыполнение условия 5 (фиг. 5) приводит к выработке управляющего сигнала в пункте 8 (фиг. 5) на собственный инвертор «Uy» (фиг. 66), при условии единовременного выполнения условия 6 (фиг. 5). При этом выходное напряжение интегратора 1.4.7 инвертора 1.4 начинает возрастать «SUy», что в свою очередь приводит к увеличению рабочей частоты инвертора. Увеличение частоты приводит к увеличению фазы между выходным напряжением и током инвертора (фиг. 6д). Что так же приводит к снижению выходной мощности инвертора «Р установившаяся» (фиг. 6е). При этом, если не удается достичь выполнение условия 5 (фиг. 5) путем снижения мощности собственного инвертора в пункте 9 (фиг. 5) вырабатывается управляющий импульс на снижение мощности РИП магнитосвязанных индукторов. Однако это необходимо для удержания инвертора в режиме работы с достижением максимального его КПД в условиях наведенных в индукторе сторонних токов от РИП магнитосвязаннх индукторов. Как следствие инвертор остается работоспособен и обеспечивает нагрев и не происходит его поломка. РПРИ удерживает инвертор в режиме, при котором ток индуктора в любом момент времени всегда отстает от выходного напряжения инвертора, тем самым обеспечивается оптимальный режим работы РИП, который широко описан в книге (Васильев А.С., Конрад Г., Дзлиев С.В. Источники питания высокочастотных электротермических установок: монография. Новосибирск: НГТУ, 2006. С. 257-288). Дальнейшее воздействие РПРИ на инвертор в данном случае заключается в поддержании необходимого выходного напряжения интегратора на необходимом уровне путем подачи периодических, коротких импульсов. Аналогичным образом происходит снижение мощности рассматриваемого РИП при наличии сигнала на портах П9, П10 УП 1.5.9, сообщающего о не достижении условия 5 (фиг. 5) РИП магнитосвязанных индукторов путем снижения мощности их инверторов. Установление входов-выходов 1.5.7, 1.5.8 РПРИ на ввод-вывод осущевствляется за счет программной поочередной перенастройки портов П9, П10 на ввод и вывод данных. Для исключения негативного эффекта снижения мощности следует увеличить индуктивность компенсации связи Ld компенсатора 1.6 (фиг. 3) от текущего значения и, или уменьшить коэффициент трансформации согласующего трансформатора 1.4.24 (фиг. 4). При этом авторы считают допустимым и незначительным снижение мощности от заданной на 10%.
Таким образом в заявленном устройстве обеспечивается нагрев детали несколькими индукторами и питание их от раздельных источников питания с заданными параметрами нагрева. При этом установление, поддержание заданных параметров нагрева и оптимального режима работы РИП индукторов осуществляется автоматически за счет выработки, при необходимости, управляющих воздействий на корректировку мощности, подаваемой на соответствующий индуктор, чем достигается требуемый процесс нагрева со снижением энергетических затрат и повышением стабильности нагрева детали несколькими индукторами с раздельными источниками питания, то есть достигается, при использовании заявленного устройства, сформулированный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСТОЧНИК ПИТАНИЯ ЭЛЕКТРОМАГНИТНЫХ КОМПЕНСАТОРОВ | 2010 |
|
RU2414740C1 |
| СПОСОБ ИНДУКЦИОННОГО НАГРЕВА, ПРИМЕНЯЕМЫЙ В УСТРОЙСТВЕ, СОДЕРЖАЩЕМ МАГНИТОСВЯЗАННЫЕ ИНДУКТОРЫ | 2010 |
|
RU2525851C2 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО ТОКА ДЛЯ ПИТАНИЯ ИНДУКТОРА | 1992 |
|
RU2040105C1 |
| Индукционная нагревательная установка | 1985 |
|
SU1288941A1 |
| Быстродействующая обучающаяся система питания установки индукционного нагрева | 2021 |
|
RU2799783C2 |
| Преобразователь частоты | 1991 |
|
SU1778896A1 |
| ЭНЕРГОЭФФЕКТИВНАЯ СИСТЕМА ПИТАНИЯ УСТАНОВКИ ИНДУКЦИОННОГО НАГРЕВА | 2020 |
|
RU2745365C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЗОНАНСНЫМ ИНВЕРТОРОМ СО ВСТРЕЧНО-ПАРАЛЛЕЛЬНЫМИ ДИОДАМИ | 2005 |
|
RU2289195C1 |
| Устройство для резервирования источников электропитания | 1988 |
|
SU1653075A1 |
| Способ пуска последовательного инвертора и устройство для его осуществления | 1979 |
|
SU862347A1 |

Изобретение относится к области электротехники, в частности к средствам индукционного нагрева металлических деталей. Технический результат заключается в снижении энергозатрат и в повышении точности соответствия реализуемого температурного профиля. Достигается тем, что в устройстве индукционного нагрева, содержащем N≥2 индукторов, подключенных к источнику питания и в полость которых введена деталь, подлежащая нагреву, введены N раздельных источников питания (РИП). Питающие входы n-го индуктора, где n=1, 2…N, подключены к питающим выходам n-го РИП, подключенных к внешней сети питания и являющихися питающими входами выпрямителя n-го РИП. Питающие выходы выпрямителя подключены к питающим входам n-го инвертора. Силовые выходы инвертора подключены к контрольным входам регулятора помехоустойчивой расстройки инвертора (РПРИ). Управляющие выходы РПРИ по каналу помехи собственного инвертора подключены к соответствующим входам регулировки по каналу помехи инвертора. Контакты РПРИ управления по каналу помехи РИП магнитосвязанных индукторов являются выходами n-го РИП, которые подключены к соответствующим выходам всех РИП. Выходы РПРИ через компенсатор являются выходами РИП. 1 з.п. ф-лы, 8 ил.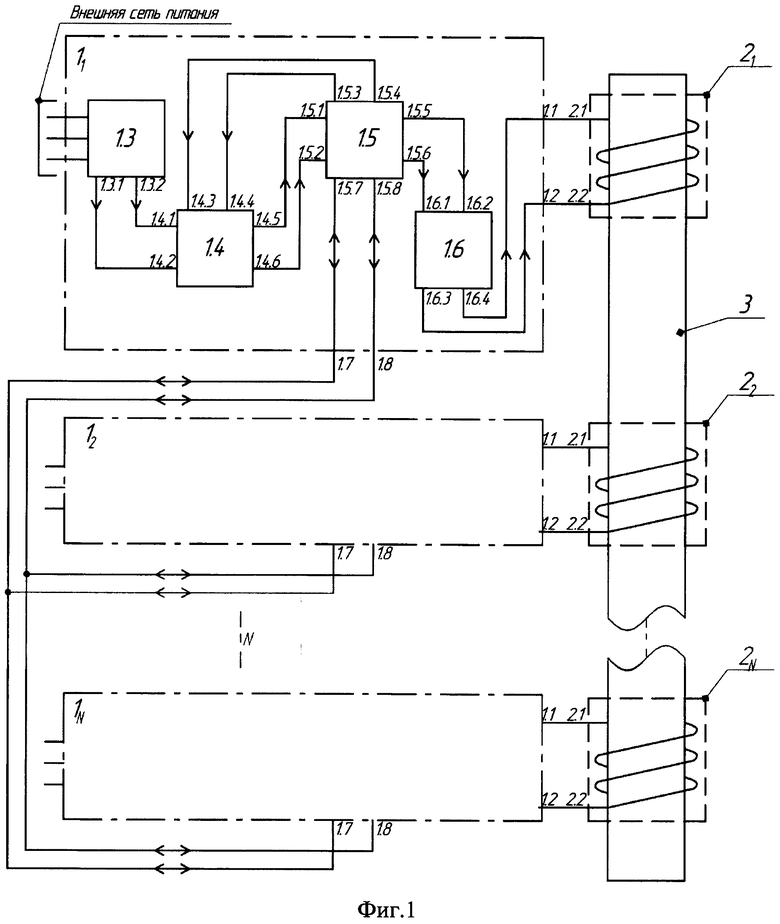
1. Устройство индукционного нагрева, содержащее N≥2 индукторов, подключенных к источнику питания и в полость которых помещена деталь, подлежащая нагреву, отличающееся тем, что введены N раздельных источников питания (11-1n), питающие входы (2.1, 2.2) n-го индуктора (2n) подключены к питающим выходам (1.1, 1.2) n-го раздельного источника питания (1n) (РИП), где n=1, 2, …, N, причем n-й РИП (1n) состоит из выпрямителя (1.3), питающие входы которого являются питающими входами n-го РИП (1n), подключенными к внешней сети питания, а питающие выходы (1.3.1, 1.3.2) выпрямителя (1.3) подключены к питающим входам (1.4.1, 1.4.2) инвертора (1.4), силовые выходы (1.4.5, 1.4.6) которого подключены к контрольным входам (1.5.1, 1.5.2) регулятора помехоустойчивой расстройки инвертора (РПРИ) (1.5), управляющие выходы (1.5.3, 1.5.4) РПРИ (1.5) регулировки по каналу помехи собственным инвертором (1.4) подключены соответственно к входам (1.4.3, 1.4.4) регулировки по каналу помехи инвертора (1.4), а входы-выходы (1.5.7, 1.5.8) РПРИ (1.5) связи с РИП магнитосвязанных индукторов являются входами-выходами (1.7, 1.8) n-го РИП (1n), которые подключены к соответствующим входам-выходам (1.7, 1.8) всех РИП (11-IN), выходы (1.5.5) и (1.5.6) РПРИ (1.5) через компенсатор (1.6) являются силовыми выходами (1.1,1.2) РИП (In).
2. Устройство по п. 1, отличающееся тем, что регулятор помехоустойчивой расстройки инвертора (РПРИ) (1.6) состоит из управляющего процессора (УП) (1.5.9), снабженного портами, П1, П2 «порты контроля биений тока», П3, П4 «порты контроля амплитуды тока индуктора», П5, П6 «порты контроля фазы между током индуктора и выходным напряжением инвертора» подключены соответственно к выходам передачи амплитуды биений тока индуктора (A1, А2) детектора амплитуды биений тока (ДАБТ) (1.5.11), к выходам передачи амплитуды тока индуктора (Д1, Д2) детектора тока индуктора (ДТИ) (1.5.10) и к выходам передачи величины фазы (Ф1, Ф2) фазового детектора (ФД) (1.5.12), контрольные входы тока индуктора (Ф3, Ф4) подключены к выходам передачи сигнала тока индуктора Д5, Д6 ДТИ (1.5.10), контрольные входы Д3, Д4 подключены соответственно к выходам передачи преобразованного тока индуктора (T1, Т2) датчика тока (ДТ) (1.5.13) и к контрольным входам A3, А4 ДАБТ (1.5.11), контрольные входы выходного напряжения инвертора (Ф5, Ф6) ФД (1.5.12) являются одновременно контрольными входами РПРИ (1.5.1, 1.5.2) и силовыми выходами (1.5.5, 1.5.6) РПРИ (1.5), которые через компенсатор (1.6) являются силовыми выходами (1.1, 1.2) РИП (1n), П7, П8 «порты воздействия по каналу помехи собственным инвертором» и П9, П10 «порты связи с инверторами магнитосвязанных индукторов» являются соответственно выходами регулировки по каналу помехи собственным инвертором (1.5.3, 1.5.4) и входами-выходами связи с РИП магнитосвязанных индукторов (1.5.7, 1.5.8).
| УСТРОЙСТВО ИНДУКЦИОННОГО НАГРЕВА С СЕКЦИОНИРОВАННЫМ ИНДУКТОРОМ | 2003 |
|
RU2256303C2 |
| ИНЖЕКТОР | 1928 |
|
SU12315A1 |
| US 8592735 B2, 26.11.2013 | |||
| US 6992406 B2, 31.01.2006. | |||

