Изобретение относится к области судостроения, в частности к морским плавучим платформам, точнее, к морским плавучим базам (МПБ), обустроенным взлетно-посадочной полосой (ВПП) для приема средних и тяжелых транспортных и других самолетов наземного базирования, и предназначенным преимущественно для использования в районах мировых морей, удаленных на большие расстояния от страны.
Известна мобильная морская база Mobile Offshore Base (MOB), формирующаяся из нескольких отдельных базовых единиц в виде самоходных плавучих модулей полупогружного типа, способных соединяться в море вместе в одну линию, чтобы сформировать полную базу со взлетно-посадочной полосой длиной не менее 1500 метров для приема средних и тяжелых транспортных самолетов типа С17 Globemaster III, одновременно она является военной базой материально-технического снабжения [1]. Базовые плавучие модули выполнены из стали и состоят из двух продольных плавучих понтонов с судовыми обводами, скрепленных между собой на заданном проектом расстоянии друг от друга поперечными связями, из вертикальных колонн, выстроенных на палубах понтонов по всей их длине с определенным интервалом и верхнего строения (ВС), установленного на колонны и жестко с ними соединенного.
Базовые плавучие модули снабжены балластными системами, с помощью которых обеспечивается требуемая осадка, в частности, транзитная - порядка 14 метров, при которой ватерлиния находится на уровне понтонов, и эксплуатационная - порядка 38 метров на уровне колонн.
Для объединения плавучих модулей устроены разъемные шарнирные и/или U-образные соединения, установленные на торцевых переборках ВС.
Каждый базовый модуль, кроме выполнения своих функций в составе MOB, способен к самостоятельным морским операциям на больших расстояниях.
В конструктивном отношении все базовые плавучие модули одинаковые, их габаритные размеры L (длина) × В (ширина) × Н (высота) корпуса равны примерно 300 м × 150 м × 75 м.
Недостатком известного технического решения являются большие эксплуатационные расходы, связанные с большой энерговооруженностью и необходимостью периодического докования стальных корпусов плавучих модулей. Кроме того, у шарнирных соединений модулей существуют серьезные проблемы с обеспечением прочности, особенно усталостной, при кручении и поперечном изгибе корпусов на волнении.
Известна морская мобильная база (MOB) из автономных плавучих модулей, обустроенная ВПП длиной не менее 1500 м, удовлетворяющей требованиям приема почти всех типов летательных аппаратов [2]. Автономный плавучий модуль представляет собой морское самоходное плавучее сооружение полупогружного типа, выполненное из стали, и состоящее из двух продольных плавучих понтонов, вертикальных колонн, выстроенных на палубах понтонов по всей их длине, и верхнего строения (ВС), установленного на колонны и жестко с ними соединенного. В данном техническом решении обращено внимание на то, что в техническом решении [1] шарнирные соединения плавучих модулей MOB обеспечивают прочность и целостность MOB и ВПП по оси тангажа, но имеют серьезные проблемы в удержании структурной целостности при поперечном изгибе и при кручении (крене и рыскании) в условиях действия резонансной динамики на волнении в открытом море, поэтому предложена концепция независимого модуля, когда каждый плавучий модуль в составе MOB независим, и расположены они на некотором расстоянии друг от друга, которое в приведенном примере равно приблизительно 35 м. Это расстояние (зазор) перекрывается мостовыми конструкциями типа панелей с ребрами жесткости и/или типа выдвижных и сочлененных пандусов, которые поддерживают ВПП практически в непрерывной конфигурации, позволяющей самолетам катиться от конца одного модуля к смежному концу другого, в то время как модули могут независимо друг от друга перемещаться на волнении во всех шести степенях свободы, при этом каждый модуль удерживается в данном положении в составе MOB (позиционируется) с некоторыми допусками с помощью 8 выдвижных азимутальных движителей (азиподов) мощностью порядка 15000÷25000 л.с. каждый, которые обеспечивают скорость движения плавучим модулям при свободном ходе более 15 узлов. Кроме указанных предусмотрены маневровые движители.
Для управления движителями и удержания относительного положения плавучих модулей в пределах горизонтальных и других ограничений возможного движения ВПП в районе моста применена система динамического позиционирования. Динамический позиционирующий элемент может включать в себя некоторое множество подруливающих устройств для создания управляющего усилия, необходимого для поддержания рабочего расстояния между модулями, равного, примерно, длине моста, которая может варьироваться в пределах от 32 до 44 метров.
В известном техническом решении применена динамическая система, которая позиционирует два, но, возможно, и три движущихся объекта относительно друг друга. Предложен вариант, когда система позиционирует первый и третий модули относительно стабильного неподвижного второго модуля. Система динамического позиционирования учитывает три переменных (скорость пульсации, скорость качки и скорость рыскания) и координирует мощность и направление каждого движителя, чтобы минимизировать эти переменные по желанию. Приведено описание упрощенной структурной схемы системы динамического позиционирования и схема ее работы. Окружающая среда генерирует силы, которые обнаруживаются датчиками, такими как радар, акселерометры, лазерные дальномеры и т.п. Датчики переводят силы в информацию, которая входит в математическую модель массы плавучего модуля. Желаемое перемещение вычисляется, передается на контроллер, который затем регулирует каждый движитель.
Кроме системы динамического позиционирования плавучих модулей, предусмотрены в узлах соединения мостов с плавучими модулями конструктивные элементы и устройства, благодаря которым соединения приобретают большую податливость, измеряемую метрами, не нарушая целостности ВПП, а также упругую податливость в тех местах, где требуется, для чего предусмотрены такие устройства, как пружинные демпферы, гидравлические цилиндры, реактивные (демпфирующие) домкраты и тому подобное.
Соединения мостов с плавучими модулями - разъемные, и, в случае необходимости, например, при угрозе сильного шторма, плавучие модули могут отсоединиться и плавать в море независимо друг от друга.
Мостовые конструкции ВПП не являются соединениями модулей в традиционном смысле, они практически не передают нагрузки между модулями для целей их позиционирования. Мостовые конструктивные элементы могут быть изготовлены из стали, алюминиевых сплавов или армированного волокнами пластика.
Размеры и конструкция каждого плавучего модуля могут варьироваться, длина модуля выбирается настолько длинной, насколько это практически возможно для минимизации движений на волнении, но настолько короткой, чтобы каждый модуль был достаточно прочным и мог противостоять воздействию волн при требуемых ветро-волновых условиях.
В известном техническом решении MOB состоит из трех одинаковых автономных модулей, у которых длина плавучего модуля равна 488 метрам (1600 футов), габаритная ширина корпуса около 122 метров (400 футов), полное водоизмещение порядка 638000 тонн.
Недостатком известного технического решения является то, что система «независимого плавучего модуля» требует движительных установок очень большой мощности для удержания модулей в требуемом положении на волнении, требует очень больших эксплуатационных затрат для поддержания в рабочем состоянии, как указанную систему, так и корпуса модулей, требующих периодического докования.
Известен морской мобильный плавучий комплекс (ММАК) [3], состоящий из конструктивно соединенных между собой железобетонных модулей - понтонов водоизмещающего типа, которые способны соединяться вместе в море в единую конструкцию с образованием взлетно-посадочной полосы и площадки для обслуживания самолетов, в качестве соединительного элемента используются троса (канаты), которые проходят в продольных каналах, устроенных для этого вдоль корпуса понтона внутри палуб и днища, и посредством их понтоны соединяются в единую конструкцию.
Недостатками известного технического решения являются:
- при выборе корпусов понтонов водоизмещающего типа не учтено, что величина волнового изгибающего момента, действующего на такой корпус, примерно, в два раза больше по величине изгибающего момента, действующего на корпус полупогружного типа с одинаковыми с ним габаритными размерами в плане при тех же волновых условиях;
- при большой длине корпуса порядка 900÷1000 м величина волнового изгибающего момента в условиях жесткого шторма порядка 9 баллов Северной Атлантики [4] может достигать величины нескольких миллионов гониометров. Именно поэтому для уменьшения величины растягивающих и сжимающих усилий в крайних силовых связях высота монолитного корпуса водоизмещающего типа длиной около 980 м в проектной проработке [5], была принята равной 100 м, в то время как монолитный корпус полупогружного типа длиной около 1000 м с такой же габаритной шириной для тех же волновых условий имеет высоту порядка 70÷75 м [6];
- для соединения плавучих модулей-понтонов в единую конструкцию использованы только напрягаемые высокопрочные арматурные канаты. Заметим, что для восприятия одинаковых, но чрезвычайно больших по величине растягивающих усилий при использовании только напрягаемых арматурных канатов в виде мощных пучков потребуется существенно большая толщина плиты для размещения в ней расчетного количества нескольких рядов пучков в соответствии с конструктивными требованиями нормативных документов [7, 8, 9] по сравнению с толщиной плиты с ненапрягаемой стержневой арматурой периодического профиля классов А-400 и А-800. Сказанное выше влечет за собой увеличение массы корпуса;
- прочность корпусов на срез и поперечное гидростатическое давление не обеспечены, так как в вертикальных связях корпуса не предусмотрены каналы и напрягаемые канаты;
- конструктивное объединение или разъединение модулей - понтонов в море на плаву практически нереализуемая задача, поскольку натяжение пучков высокопрочных канатов на бетон с последующей их анкеровкой на концах модулей с учетом того, что таких пучков в поперечном сечении корпуса из-за больших габаритов может быть несколько тысяч, представляет собой весьма трудоемкую работу и для ее выполнения потребуется несколько недель или даже месяцев.
Известна морская мобильная база (MOB) [5], состоящая из нескольких одинаковых базовых единиц в виде самоходных плавучих модулей полупогружного типа композитной (гибридной) конструкции, способных выстраиваться в одну линию, стыковаться друг с другом и формировать в открытом море MOB со взлетно-посадочной полосой (ВПП) длиной порядка 1525 м для приема средних и тяжелых транспортных самолетов типа С17 Globemaster и принятая в качестве прототипа.
Каждый плавучий модуль состоит из двух продольных железобетонных понтонов, жестко соединенных между собой на заданном расстоянии друг от друга посредством стальных поперечных связей, из вертикальных железобетонных колонн, выстроенных на палубах понтонов по всей их длине с определенным интервалом, и стального верхнего строения (ВС), установленного на колонны и жестко с ними соединенного.
Железобетонные понтоны и колонны MOB выполнены из легкого высокопрочного бетона, при изготовлении которого применен легкий высокопрочный заполнитель, удовлетворяющего требованиям проектирования и строительства очень крупных морских плавучих сооружений, таких как MOB, с длительным расчетным сроком службы, нередко до 100 лет, низкой стоимостью поддержания корпусных конструкций в эксплуатационном состоянии и высокой усталостной прочностью. Применение легкого высокопрочного бетона повышает технические и экономические качества MOB, в частности, снижается осадка, по сравнению с корпусами из обычного тяжелого бетона, что способствует увеличению скорости при транзите плавучих модулей.
В известном техническом решении MOB состоит из четырех базовых плавучих модулей длиной и шириной на уровне палубы ВС 381 м (1250 футов) и 152, 5 м (500 футов) соответственно. Длина понтонов равна 365 м, что обеспечивает достаточное пространство (зазор) между понтонами модулей в составе MOB для рыскания и тангажа на волнении. Поперечное сечение понтонов (ширина 47,5 м и высота 16,5 м) приняты с учетом требований к их плавучести и скорости хода. Эксплуатационная осадка MOB равна 36,5 м, при которой уровень WL пересекает колонны, осадка в режиме движения плавучего модуля свободным ходом равна 15,7 м. На каждом плавучем модуле установлено 8 движителей мощностью по 6 МВт, которые обеспечивают скорость движения 8÷10 узлов.
Железобетонный корпус плавучих модулей MOB [5], имеет усталостный ресурс порядка 600 лет, при этом для зон, не имеющих доступа для осмотра, ожидаемый срок службы на усталость равен не менее 60 лет при очень большом коэффициенте запаса прочности и долговечности.
Для стыковки плавучих модулей в море разработаны соединительные устройства, которые размещены на торцевых переборках ВС, обладающие упругой податливостью и амортизирующими свойствами. В конструкциях соединений, кроме конструктивных обустройств на торцевых переборках в виде уступов, ниш и выступающих частей, применены эластомерные подшипники, гидравлические домкраты и тому подобное. Они подавляют относительные пульсации, колебания, рывки и крены между модулями, допускают движения тангажа и рыскания. В качестве предельных расчетных нагрузок для соединительных устройств приняты усилия, действующие при значительной высоте волны HS=7,5 м, периоде 17,4 секунды и курсовом угле волнения не более ±45°. Конструкции соединений допускают большие относительные перемещения при подсоединении одного модуля к другому и расцеплении модулей в море. В начальный момент присоединения модулей допускаются вертикальные относительные перемещения, равные ±2,0 м. Во время отсоединения модулей, если относительные перемещения их начнут превышать предельно допустимые значения: ±0,15 м в продольном направлении и ±1,5 м в вертикальном, то для уменьшения ударных нагрузок включаются упругие конструкции типа крыльев, обладающие ударно-амортизирующими свойствами. Для восприятия осевых растягивающих усилий между модулями используются напрягаемые высокопрочные стальные канаты. Приведенные в статье [5] результаты расчетных исследований, включая гидродинамический анализ двух вариантов корпусов плавучих модулей с целью оценки влияния увеличения размеров модулей на технико-экономические характеристики MOB, показали, что увеличение длины модуля с 381 м до 456,2 м с соответствующим увеличением других размеров корпусных конструкций, при этом длина MOB возрастает с 1524 м до 1829 м (приблизительно на 20%), приводит к увеличению стоимости на 11%.
Недостатком предложенной конструкции MOB является необходимость отсоединяться плавучим модулям друг от друга, когда прогнозируется критическое для базы состояние моря, порядка 6÷7 баллов, при котором возможны перегрузки в элементах соединительных устройств, однако, основной причиной является исключение возможности усталостных повреждений соединений из-за ограниченного ресурса их усталостной прочности. В любом случае, модули должны отсоединяться при волнении заведомо и всегда ниже предельно допустимой расчетной значительной высоты волны HS=7,5 м. Можно отметить еще один недостаток MOB - это большие эксплуатационные расходы на содержание энергетических установок и оборудования, только для обеспечения движения модулей в море с требуемой заказчиком скоростью 8-10 узлов, на них устанавливается 32 движителя с энергетическими установками с суммарной мощностью 192 МВт.
Кроме приведенного выше известного технического решения в [5] приведено еще одно известное техническое решение, альтернативное предыдущей конструкции MOB, в которой отсутствуют соединения и соединительные устройства. Предложен железобетонный монокорпус водоизмещающего типа длиной 890 м и высотой 100 м, являющийся основой MOB, в районе торцевых частей его выстроены стальные консоли длиной по 317 м, при этом общая длина MOB на уровне палубы равна 1524 м (5000 футов). Нижняя часть железобетонного корпуса имеет ширину 120 м, верхняя часть высотой 8 м, включая палубу, имеет ширину 152,0 м. Монокорпус выполнен из высокопрочного бетона с легким высокопрочным заполнителем марки LWC60, общий объем бетона 747000 м3, общий вес двух стальных консолей 143000 тонн.
Минимальная осадка монокорпуса 19,4 м, скорость движения на тихой воде равна 12 узлам при двигательной мощности 173 МВт.
Максимальная вертикальная амплитудная скорость (SSA) составляет 1,04 м/с на кончике консолей во время полетов самолетов при курсовом угле волнения менее 45°.
Максимальная допустимая скорость по данным расчетной базы [5] составляет 1,4 м/с, максимальное вертикальное ускорение (значение SSA) - 0,31 м/с2.
Наиболее вероятное максимальное вертикальное ускорение на конце консолей в условиях выживания составляет 5,2 м/с2.
Недостатками известного технического решения MOB с монокорпусом большой длины водоизмещающего типа и очень длинными консолями на концах являются:
- на корпус водоизмещающего типа большой длины порядка 900 м действует очень большой по величине продольный изгибающий момент, измеряемый миллионами тоннометров в условиях максимального расчетного волнения, например, в условиях жесткого шторма 9 баллов северной Атлантики, при котором высота волны равна h=14,0 м при длине до 500 м, а во время зыби высота волны может достигать величины 18 м при длине порядка 810 м [4,5]. Указанный продольный изгибающий момент по величине примерно в 2 раза превышает изгибающий момент, действующий на корпус полупогружного типа с такими же габаритными размерами в плане при эксплуатационной осадке около d ≈ 36 м при тех же волновых условиях. Именно это является одной из причин, по которой монокорпус водоизмещающего типа имеет большую высоту Н=100,0 м [5], в то время как корпус полупогружного типа при длине около 1000 м, рассчитанный на усилия при тех же волновых условиях, имеет высоту порядка 70÷80 м, [6] при этом наибольшее значение 80 м рассчитано не из условия обеспечения общей прочности при изгибе корпуса, а из условия снижения нагрузки на днище ВС при слеминге в условиях экстремального волнения hB=26,0 м [5].
- угол тангажа, а также максимальная скорость и ускорение перемещений корпуса на волнении, особенно на концах консолей, существенно больше, чем у корпуса полупогружного типа с такими же габаритными размерами в плане.
Задачей предлагаемого изобретения является создание технической возможности на МПБ, состоящей из плавучих модулей полупогружного типа с корпусами композитной (гибридной) конструкции, у которых понтоны с колоннами из железобетона, а верхнее строение стальное, обеспечивать посадки самолетам, включая вынужденные, в более тяжелых волновых условиях по сравнению с известными техническими решениями мобильных оффшорных баз (MOB), состоящих из одинаковых плавучих модулей полупогружного типа длиной от 300 до 500 м, которые при прогнозе о критичном для MOB состоянии моря, порядка 6÷7 баллов, отсоединяются друг от друга, а также уменьшения эксплуатационных затрат на содержание и бесперебойную работу базы в процессе всего времени эксплуатации, что является серьезным достоинством МПБ, учитывая возможную очень большую удаленность района стоянки ее от страны, которой она принадлежит, и большой срок службы. Известно, что экономическая эффективность очень крупных морских сооружений существенно зависит от низкой стоимости обслуживания и от продолжительности срока службы [5].
Поставленная задача решается благодаря тому, что морская плавучая база островного типа, состоящая из нескольких отдельных базовых плавучих модулей полупогружного типа, снабженных движительными установками, соединяющихся в море в одну линию для формирования полной базы со взлетно-посадочной полосой длиной не менее 1500 м, корпуса которых имеют композитную конструкцию, состоят из двух продольных железобетонных понтонов, по контуру поперечных сечений которых устроены двойные продольные связи, на палубах выстроены вдоль них вертикальные железобетонные колонны с определенным интервалом, опирающиеся на продольные и поперечные переборки понтонов, при этом понтоны расположены параллельно на заданном проектном расстоянии друг от друга и жестко объединены между собой поперечными стальными связями, стальное верхнее строение, установленное на колонны и жестко с ними соединено, имеет следующие отличия: один из базовых плавучих модулей - супермодуль имеет длину не менее 1000 метров, остальные, не менее двух малых базовых плавучих модулей имеют длину не менее 250 м каждая, движительные установки супермодуля имеют суммарную мощность, обеспечивающую движение супермодуля в море скоростью до 4÷5 узлов, выполнение маневров на точке эксплуатации и увеличение скорости при буксировке на большие расстояния, вертикальные колонны выполнены из железобетона до уровня не менее 6 м выше эксплуатационной ватерлинии.
А также в двойных конструктивных связях по контуру поперечных сечений понтонов базовых плавучих модулей вместо обычно устанавливаемых поперечных переборок установлены продольные железобетонные переборки с продольным армированием стержнями периодического профиля.
А также в районах сопряжений наружной днищевой плиты с поперечными переборками понтона супермодуля, где наибольшие по величине растягивающие усилия от общего изгиба суммируются с растягивающими усилиями от местного изгиба при действии гидростатического давления, возможно усиление плиты напрягаемыми арматурными канатами или напрягаемыми высокопрочными стержнями.
А также корпуса составных частей супермодуля и малых базовых плавучих модулей имеют однотипные конструкции за исключением конструктивного исполнения их оконечностей.
А также супермодуль на месте эксплуатации носовой оконечностью соединяется гибкими связями с к поворотной турелью на крупногабаритной плавучей бочке, установленной заранее и прикрепленной к донному грунту моря с помощью якорей, цепей и тросов, возможно использование якорей гравитационного типа.
Длина супермодуля с ВПП на его палубе увеличена до величины порядка 1000 м, достаточной для выполнения посадки тяжелого транспортного самолета типа Ил-76 с полным грузом, у которого длина пробега при посадке с полным грузом без применения реверса двигателем равна 930 м. [электронный ресурс URL:http://www.ilyushin.org/aircrafts/transport/309/] Посадка самолета на МПБ при тяжелых ветро-волновых условиях в отличие от MOB, имеющего плавучие модули меньшей длины, будет обеспечена, поскольку длинна ВПП при любых условиях остается достаточной, кроме того при увеличении длины корпуса супермодуля амплитуда колебаний его уменьшится, что упрощает взлет и посадку в сложных погодных условиях. Для минимизации эксплуатационных расходов, кроме того, что понтоны и колонны супермодуля выполнены из железобетона и имеют повышенную долговечность в морской воде без докования, супермодуль оснащен ограниченным количеством движителей с электродвигателями, суммарной мощностью, достаточной для самостоятельного движения в море с относительно небольшой скоростью 4÷5 узлов и для выполнения маневров на месте стоянки, а также для увеличения скорости движения при буксировки его во время переходов на большие расстояния. Остальные не менее двух одинаковых малых базовых плавучих модуля МПБ имеют относительно небольшую длину ВПП не менее 200 м для сохранения общей длины базы 1500 м, являются самоходными, могут выполнять самостоятельное движение морем со скоростью 8; 10 узлов на большие расстояния. Это позволяет в необходимых случаях доставлять на базу требуемое оборудование, материалы и выполнять другие операции.
Сущность изобретения поясняется рисунками:
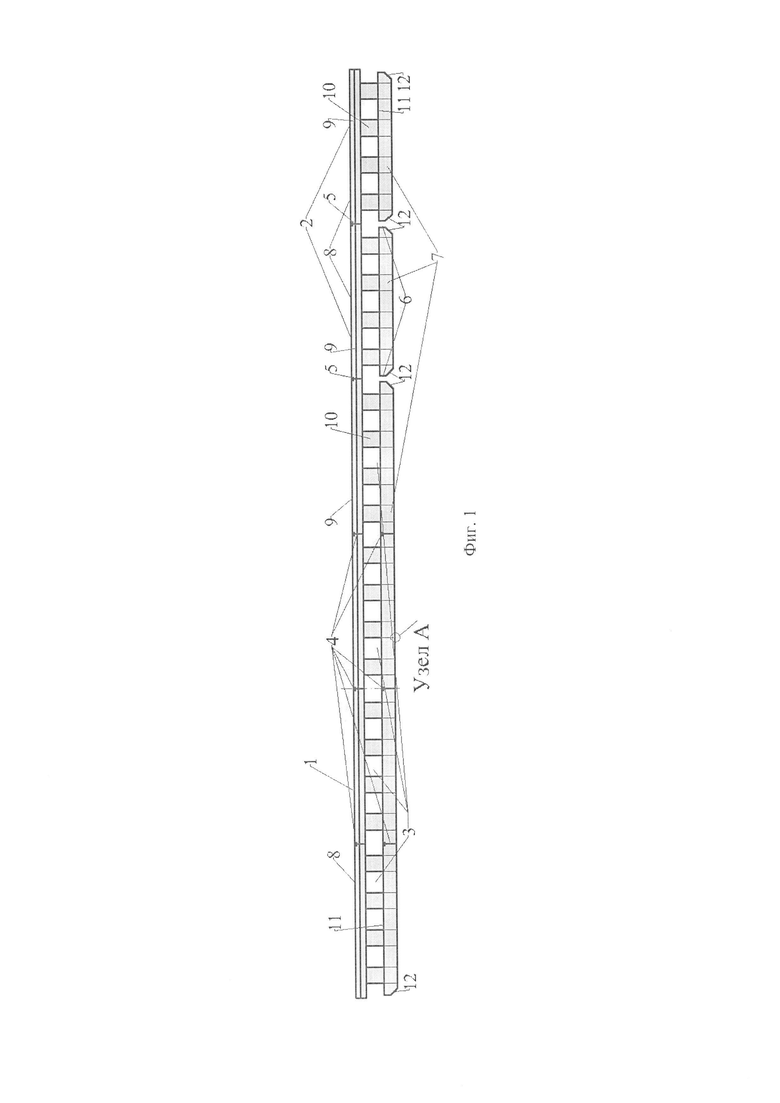
- на фиг. 1 приведена схема продольного вида предлагаемой МПБ из трех плавучих модулей полупогружного типа;
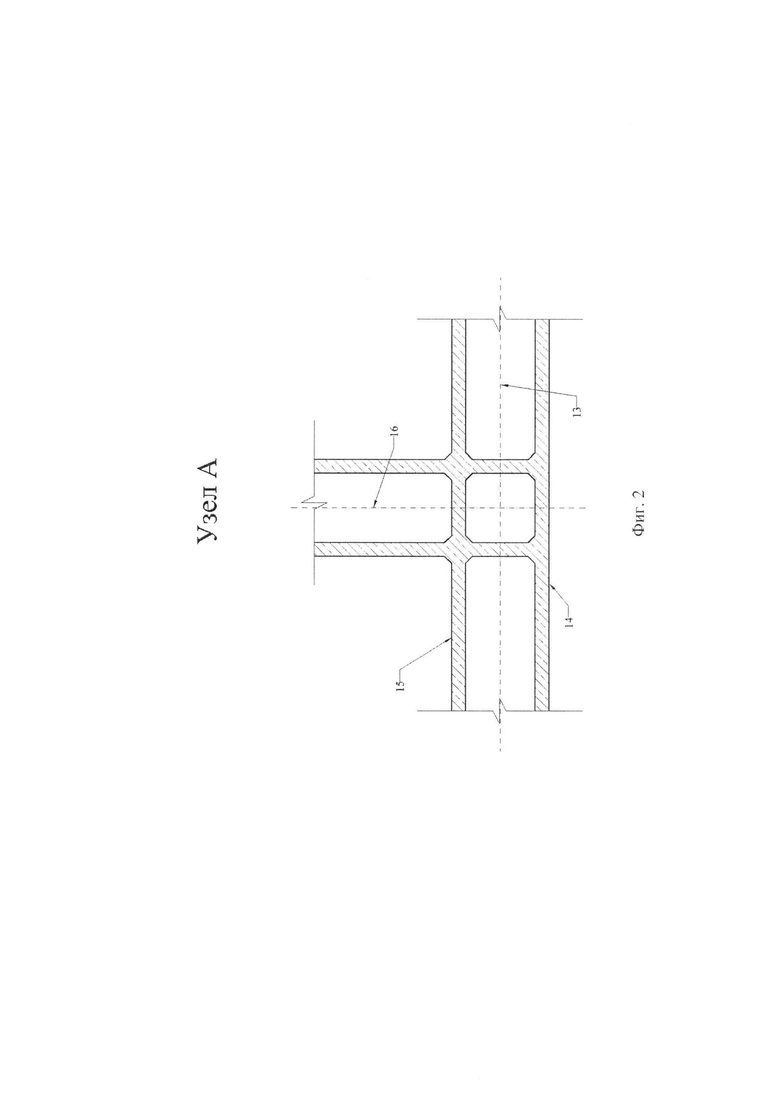
- на фиг. 2 приведена схема узла сопряжения двойной днищевой железобетонной связи;
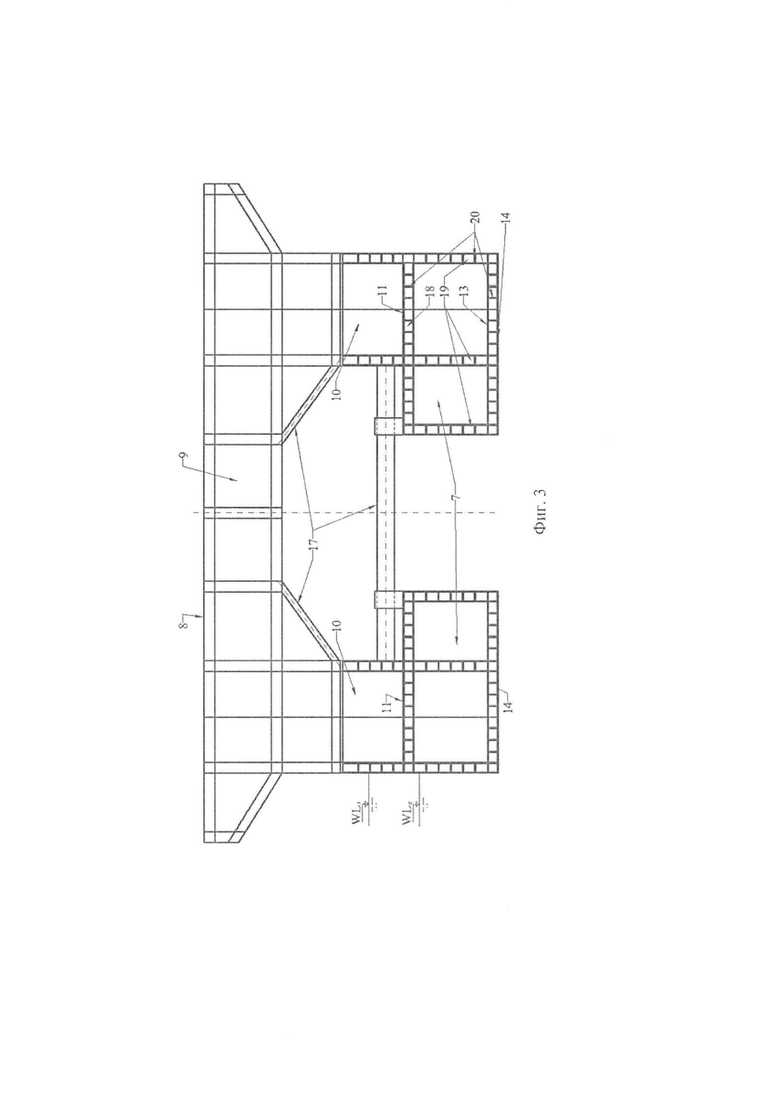
- на фиг. 3 приведена схема поперечного сечения корпуса плавучего супермодуля;
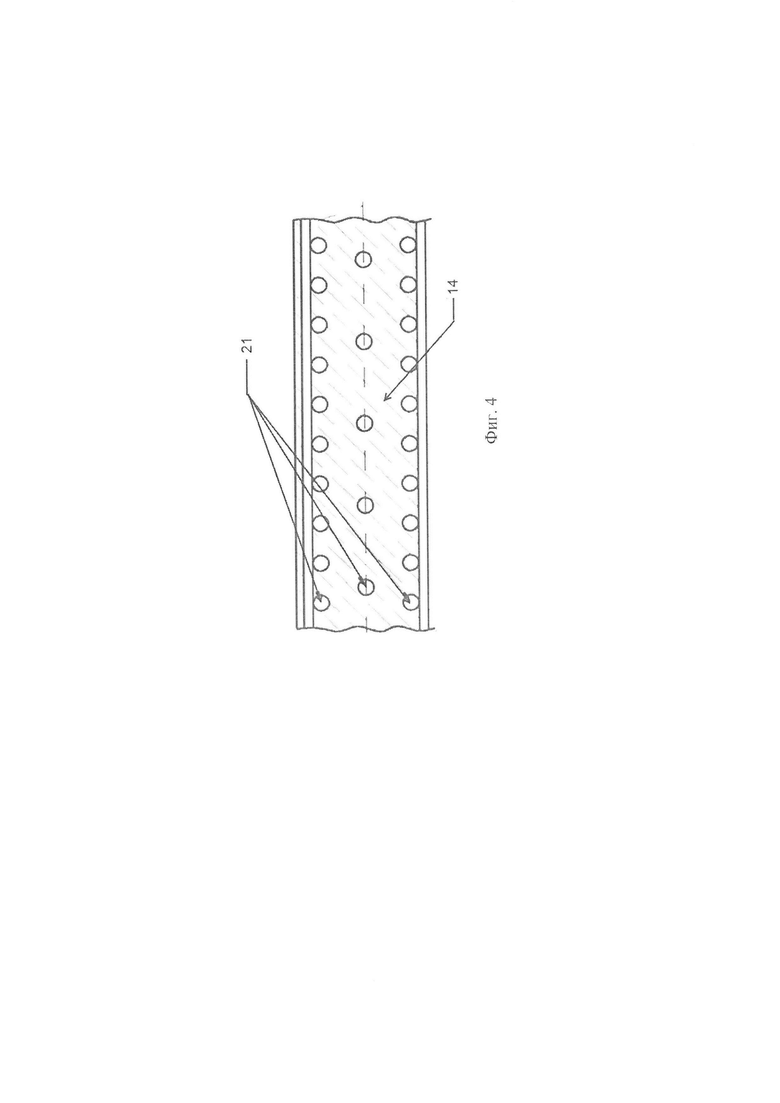
- на фиг. 4 приведена схема поперечного сечения наружной днищевой плиты понтона супермодуля;
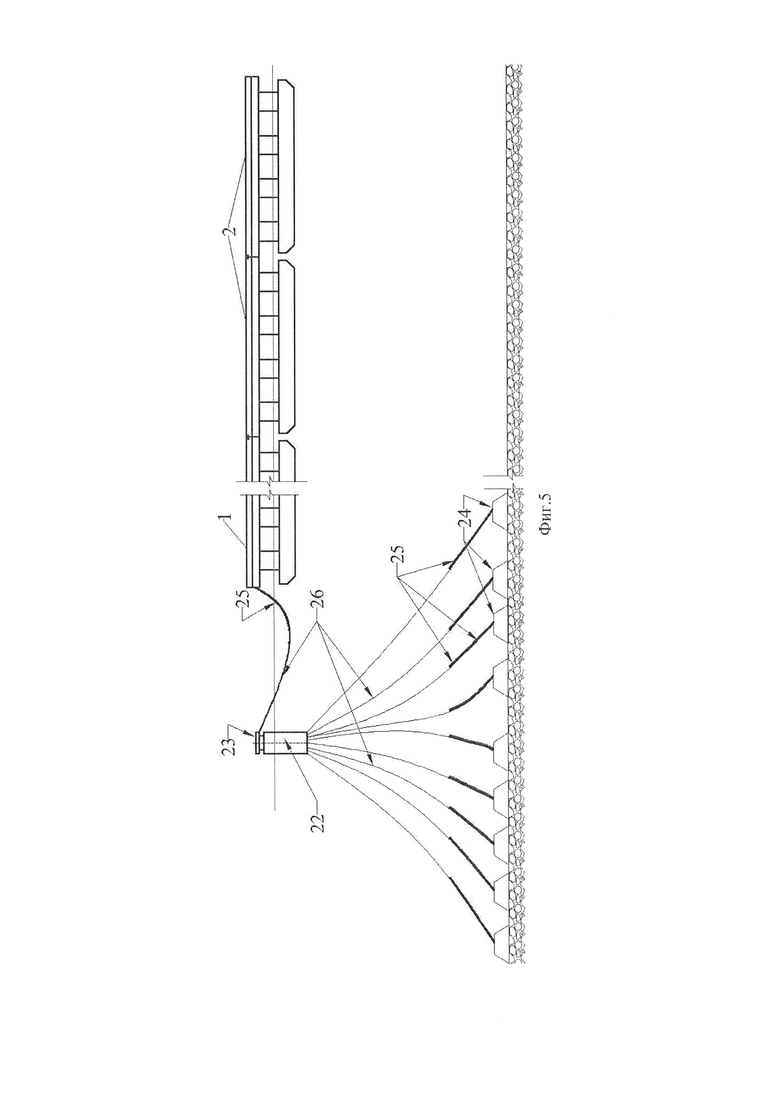
- на фиг. 5 приведена схема расстановки модулей в составе МПБ на точке эксплуатации;
где:
1 - супермодуль
2 - малые базовые плавучие модули
3 - плавучие составные части
4 - жесткие соединения
5 - разъемные соединения
6 - зазоры
7 - железобетонные понтоны
8 - палубы ВС
9 - верхнее строение (ВС)
10 - вертикальные колонны
11 - палуба железобетонных понтонов
12 - транцевые переборки
13 - двойная днищевая железобетонная связь
14 - наружная днищевая плита
15 - внутренняя днищевая плита
16 - двойная поперечная железобетонная переборка
17 - стальные трубы
18 - двойная связь железобетонного понтона
19 - вертикальная двойная связь железобетонного понтона
20 - продольные железобетонные переборки
21 - стержни периодического профиля
22 - плавучая бочка
23 - поворотная турель
24 - якоря
25 - цепи
26 – тросы.
Предлагаемая МПБ (фиг. 1) состоит из трех плавучих модулей полупогружного типа (1,2) с композитной конструкцией корпусов при этом супермодуль (1) имеет длину не менее 1000 м, каждый малый базовый плавучий модуль (2) имеет длину не менее 250 м, а общая длина МПБ равна, как минимум, 1500 м.
Корпуса малых плавучих модулей (2) и четырех плавучих составных частей (3) объединенных в единый корпус супермодуля (1) с помощью жестких соединений (4) по своей конструкции, для унификации, имеют однотипные конструкции за исключением конструктивного исполнения их оконечностей. Имеются незначительные конструктивные отличия в сечениях жестких соединений (4) плавучих составных частей (3) корпуса супермодуля (1) и в сечениях разъемных соединений (5) базовых плавучих модулей (1, 2). В сечениях, где расположены разъемные соединения (5), между железобетонными понтонами (7) предусмотрены зазоры (6) величиной до 10÷15 м во избежание соударений понтонов при тангаже плавучих модулей на волнении, поэтому железобетонные понтоны (7) имеют уменьшенную длину по сравнению с длиной палуб (8) ВС (9) (фиг. 1), опирающегося на вертикальные колонны (10), установленные на палубы (11) железобетонных понтонов (7). Кроме того, транцевые переборки (12) имеют наклоны с целью снижения гидродинамического сопротивления при движении в море.
Однотипность корпусов, составляющих частей супермодуля (1) и малых модулей (2) позволяет существенно снизить строительную стоимость МПБ.
На фиг. 2 представлена схема узла сопряжения двойной днищевой железобетонной связи (13), состоящей из наружной днищевой плиты (14) и внутренней днищевой плиты (15), с двойной поперечной железобетонной переборкой (16) понтона (7).
На фиг. 3 представлена схема поперечного сечения корпуса плавучего супермодуля (1), состоящего из железобетонных понтонов (7), вертикальных колонн (10) из железобетона до уровня, как минимум, на 6 м выше эксплуатационной ватерлинии (Wэ), верхнего строения (9) и поперечных связей из стальных труб (17).
На фиг. 4 представлена схема поперечного сечения наружной днищевой плиты (14) понтона (7) супермодуля (1), одной из наиболее нагруженной несущей связи корпуса с продольным армированием стержнями периодического профиля (17).
Корпус супермодуля (1) имеет определенные конструктивные особенности, обусловленные действием больших по величине продольных усилий, вызванных общим волновым изгибающим моментом, исчисляемым миллионами гониометров. В частности, в двойных конструктивных связях (18), (19) железобетонных понтонов (7) вместо обычно устанавливаемых поперечных переборок установлены продольные железобетонные переборки (20) в двойных связях (13) (18) (19) повышенной толщины с мощным продольным армированием стержнями периодического профиля (21).
Так, например, в наиболее нагруженной растягивающими напряжениями наружной днищевой плите (14) (Фиг. 3, 4), кроме двух основных крайних рядов установлен требуемый по расчету третий ряд продольных стержней периодического профиля (21). В районе сопряжения наружной днищевой плиты (14) (фиг. 2, 3 и 4) с двойными поперечными железобетонными переборками (16) (фиг. 2), где в плите (14) суммируются напряжения от общего изгиба и местного изгиба, обусловленного гидростатическим давлением на днище, возможно, при необходимости, усиление напрягаемыми арматурными канатами (на фигуре не показано) или напрягаемыми высокопрочными стержнями класса А-800 для повышения сопротивляемости бетона трещинообразованию и обеспечения ширины раскрытия трещин в бетоне в пределах допустимого Правилами РМРС [7, 8] уровня.
Проблема обеспечения прочности и сопротивляемости бетона трещинообразованию наиболее нагруженных продольных железобетонных связей от действия больших растягивающих усилий при общем изгибе супермодуля усугубляется еще и тем, что суммарная ширина поперечного сечения двух понтонов примерно на 40% меньше ширины верхней части поперечного сечения ВС.
Выполненные расчеты прочности и жесткости корпуса, а также трещинообразования в бетоне наружной днищевой плиты (14) (Фиг. 2, 3 и 4) понтона (7) супермодуля (1) показали, что номинальные нормальные и касательные напряжения в основных несущих связях, а также ширина раскрытия трещин в бетоне днищевой плиты (14) не превышают допустимых значений Правилами РМРС [7, 8] при действии нагрузок в условиях расчетного волнения, принятого в расчетах для 9-балльного шторма, параметры которого приведены выше и в [4]. В местах концентрации напряжений могут быть предусмотрены конструктивные усиления в соответствии с требованиями Правил РМРС, правил конструирования корпусов [7, 10].
Величина радиуса кривизны ВПП при прогибе корпуса в условиях расчетного волнения не превышает допустимых значений и позволяет выполнить посадку самолетам на ВПП супермодуля (1).
Что касается малых модулей (2), то обеспечение прочности и требуемой сопротивляемости бетона трещинообразованию наружной днищевой железобетонной плиты особых проблем не вызывает, поэтому контур поперечного сечения, расположение продольных связей, а также поперечных переборок по всей длине корпуса остаются такими же, как у супермодуля, а толщины стальных и железобетонных связей и армирование последних определяются расчетом в соответствии с Правилами РМРС и СНиП [7, 8, 9].
Форма поперечного сечения вертикальных колонн (15) может варьироваться от круглой до восьмигранника, например, квадрата со скошенными углами или просто квадрата. Круглая форма поперечного сечения колонны способствует уменьшению поперечных сил между понтонами на волнении, форма восьмигранника или квадрата позволяет обеспечить лучшую перевязку граней колонн с продольными и поперечными связями понтонов и ВС.
Порядок расстановки модулей в составе МПБ на месте эксплуатации (фиг. 5):
вначале на точке стоянки устанавливается крупногабаритная плавучая бочка (22), снабженная поворотной турелью с вертикальной осью (23), бочка крепится к донному грунту моря с помощью якорей (24), цепей (25) и тросов (26), в том числе возможно использование якорей гравитационного типа;
к турели (23) на бочке (21) крепится супермодуль (1) с помощью цепей (25), тросов (26) и/или канатов, для чего на носовой его части имеется палуба с соответствующим оборудованием (на фигуре не показано);
к кормовой части супермодуля (1) присоединяются два малых модуля (2) последовательно один за другим, выстроившись в одну линию, при этом для стыковки модулей могут быть использованы конструкции разъемных соединений, предложенные в известном техническом решении [5] или в других известных источниках, например, [2].
Таким образом, предлагаемое техническое решение способствует расширению технических возможностей МПБ, обеспечивая посадку самолетов, в том числе и вынужденную, в меньшей зависимости от волновых условий в море по сравнению с известными MOB, и сохраняя при этом возможности выполнения функций по назначению, например, как базы материально-технического снабжения транзитных рейсов самолетов и морских судов, для обеспечения работы платформы типа «Морской старт», а, кроме того, снижению эксплуатационных расходов на содержание и обеспечение бесперебойной работы базы. Несмотря на то что экономический эффект достигается за счет уменьшения энерговооруженности супермодуля, вследствие чего он не является полноценно самоходным, но здесь следует иметь в виду, что переходы МПБ на большие расстояния, например, для смены места эксплуатации, будут относительно редким событием.
Список источников
1. Mobile offshore base patent WO 9912806 A1 / S.J. Menard, T.Robert, J Mills; Mcdermott technology, № PCT/US199/014718; Appl. 20.07.98; publ. 18.03.1999. 13 p.
2. Device and method for an independent module offshore mobile base patent US 6.196.151 B1 /Robert G. Grant, Richard C. Lundberg, Daniel. K. Dolan; Benel Group, inc. Appl. No 09/193.055 publ. 06.mar.2001.
3. Патент RU 2545140 C2 /Хрымов Н.Б. от 01.10.2012 «Морской мобильный аэродромный комплекс».
4. В.И. Поленин, Н.Б. Хрымов. Морской мобильный аэродромный комплекс и морской мобильный островной комплекс: концептуальные модели. «Новый оборонный заказ. Стратегия» №1 (38) 216. с. 62-66.
5. Mobile offshore base concept. Concrete hull and steel top sides. Gunnar Rognass, Jun Xu, Severin Lindseth / Marine structures 14(2001) 5-23.
6. Статья Монолитный корпус морской плавучей базы для тяжелых транспортных самолетов, Л.Н. Подгорный, М.В. Знаменский, Н.Г. Попов, Труды крыловского научного центра Специальный выпуск 1 /2020, Санкт Петербург, 17.02.2020.
7. Правила постройки корпусов морских судов и плавучих сооружений с применением бетона. Российский Морской Регистр Судоходства, 2000 г.
8. РМРС Правила классификации, постройки и оборудования плавучих буровых установок и морских стационарных платформ, 2016.
9. СП 63.13330.2012. Бетонные и железобетонные конструкции. Основные положения. Актуализированная редакция СНиП 52-01-2003, М., 2012.
10. Правила конструирования корпусов транспортных судов. РД 5.76.022 - 83.
11. Авторское свидетельство на изобретение SU 1796535 А1 / Б.И. Баканов и др. "Узел выполняемого на плаву соединения подводных частей корпуса железобетонного судна".
12. А.С. Рошковский, Н.Г. Слуцкий "Инновационные технологии в докостроении". Електронний вicник ПУК. №1, 2010.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКОЙ МОБИЛЬНЫЙ АЭРОДРОМНЫЙ КОМПЛЕКС | 2012 |
|
RU2545140C2 |
| Временная плавучая взлетно-посадочная полоса | 2023 |
|
RU2824218C1 |
| ПОЛУПОГРУЖНОЙ МНОГОЦЕЛЕВОЙ МОРСКОЙ КОМПЛЕКС | 2021 |
|
RU2757512C1 |
| МОРСКАЯ ПОЛУПОГРУЖНАЯ ВЕРТОЛЕТНАЯ ПЛАТФОРМА | 2011 |
|
RU2475407C1 |
| КОНСТРУКЦИЯ КОРПУСА | 1998 |
|
RU2203828C2 |
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |
| ПОЛУПОГРУЖНАЯ МОРСКАЯ ПЛАТФОРМА ПОВЫШЕННОЙ ВОЛНОСТОЙКОСТИ | 2001 |
|
RU2191132C1 |
| МОРСКАЯ ЛЕДОСТОЙКАЯ СТАЦИОНАРНАЯ ПЛАТФОРМА И СПОСОБ ЕЕ СООРУЖЕНИЯ | 1999 |
|
RU2151842C1 |
| ПОЛУПОГРУЖНОЕ ПЛАВУЧЕЕ ОСНОВАНИЕ И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2011 |
|
RU2591780C2 |
| МОРСКАЯ ТЕХНОЛОГИЧЕСКАЯ ЛЕДОСТОЙКАЯ ПЛАТФОРМА | 2012 |
|
RU2522628C1 |
Изобретение относится к области судостроения и касается морских плавучих сооружений, обустроенных взлетно-посадочной полосой для приема средних и тяжелых транспортных и других самолетов. Предложена морская плавучая база, состоящая из нескольких отдельных базовых плавучих модулей полупогружного типа, снабженных движительными установками, соединяющихся в море в одну линию для формирования полной базы со взлетно-посадочной полосой длиной не менее 1500 м, корпуса которых имеют композитную конструкцию, состоят из двух продольных железобетонных понтонов, по контуру поперечных сечений которых устроены двойные продольные связи, на палубах выстроены вдоль них вертикальные железобетонные колонны с определенным интервалом, опирающиеся на продольные и поперечные переборки понтонов, при этом понтоны расположены параллельно на заданном проектном расстоянии друг от друга и жестко объединены между собой поперечными стальными связями, стального верхнего строения, установленного на колонны и жестко с ними соединенного, при этом один из базовых плавучих модулей - супермодуль имеет длину не менее 1000 метров, остальные, не менее двух малых базовых плавучих модулей, имеют длину не менее 250 м каждый, движительные установки супермодуля имеют суммарную мощность, обеспечивающую движение супермодуля в море скоростью до 4÷5 узлов, выполнение маневров на точке эксплуатации и увеличение скорости при буксировке на большие расстояния, вертикальные колонны выполнены из железобетона до уровня не менее 6 м выше эксплуатационной ватерлинии. Изобретение обеспечивает улучшение технических и эксплуатационных характеристик плавучей базы. 4 з.п. ф-лы, 5 ил.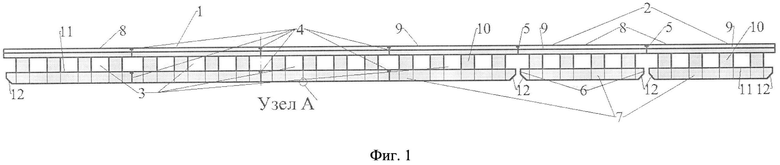
1. Морская плавучая база островного типа, состоящая из нескольких отдельных базовых плавучих модулей полупогружного типа, снабженных движительными установками, соединяющихся в море в одну линию для формирования полной базы со взлетно-посадочной полосой длиной не менее 1500 м, корпуса которых имеют композитную конструкцию, состоят из двух продольных железобетонных понтонов, по контуру поперечных сечений которых устроены двойные продольные связи, на палубах выстроены вдоль них вертикальные железобетонные колонны с определенным интервалом, опирающиеся на продольные и поперечные переборки понтонов, при этом понтоны расположены параллельно на заданном проектном расстоянии друг от друга и жестко объединены между собой поперечными стальными связями, стального верхнего строения, установленного на колонны и жестко с ними соединенного, отличающаяся тем, что один из базовых плавучих модулей - супермодуль имеет длину не менее 1000 м, остальные, не менее двух малых базовых плавучих модулей, имеют длину не менее 250 м каждый, движительные установки супермодуля имеют суммарную мощность, обеспечивающую движение супермодуля в море скоростью до 4÷5 узлов, выполнение маневров на точке эксплуатации и увеличение скорости при буксировке на большие расстояния, вертикальные колонны выполнены из железобетона до уровня не менее 6 м выше эксплуатационной ватерлинии.
2. Морская плавучая база островного типа по п. 1, отличающаяся тем, что в двойных конструктивных связях по контуру поперечных сечений понтонов базовых плавучих модулей устанавливаются продольные железобетонные переборки с продольным армированием стержнями периодического профиля.
3. Морская плавучая база островного типа по п. 1, отличающаяся тем, что в районах сопряжений плиты с поперечными переборками понтона, где растягивающие усилия от общего изгиба суммируются с растягивающими усилиями от местного изгиба при действии гидростатического давления, возможно усиление плиты напрягаемыми арматурными канатами или напрягаемыми высокопрочными стержнями.
4. Морская плавучая база островного типа по п. 1, отличающаяся тем, что корпуса составных частей супермодуля и малых базовых плавучих модулей имеют однотипные конструкции, за исключением конструктивного исполнения их оконечностей.
5. Морская плавучая база островного типа по п. 1, отличающаяся тем, что супермодуль на месте эксплуатации носовой оконечностью соединяется гибкими связями с поворотной турелью на крупногабаритной плавучей бочке, установленной заранее и прикрепленной к донному грунту моря с помощью якорей, цепей и тросов, возможно использование якорей гравитационного типа.
| WO 9912806 A1, 18.03.1999 | |||
| CN 103482035 A, 01.01.2014 | |||
| US 6196151 B1, 06.03.2001 | |||
| МОРСКОЙ МОБИЛЬНЫЙ АЭРОДРОМНЫЙ КОМПЛЕКС | 2012 |
|
RU2545140C2 |
| CN 102556294 A, 11.07.2012. | |||

