Область техники
[0001] Настоящее изобретение относится к способу управления транспортным средством и устройству управления транспортным средством.
Предпосылки изобретения
[0002] Патентный документ 1 раскрывает изобретение, относящееся к управлению приводным усилием в гибридном транспортном средстве, в котором сочетаются обычный двигатель и электродвигатель-генератор. В частности, целевое приводное усилие рассчитывается из скорости транспортного средства и величины нажатия на педаль акселератора, приводное усилие электродвигателя, подлежащее генерированию с использованием электрической энергии, которую может подавать аккумуляторная батарея, вычисляется на основе скорости транспортного средства и состояния заряда аккумуляторной батареи, и затем приводное усилие, которое запрошен выдать обычный двигатель, вычисляется из значения, полученного вычитанием приводного усилия электродвигателя из целевого приводного усилия.
СПИСОК ЦИТАТ
Патентная литература
[0003] Патентный документ 1: публикация заявки на патент Японии № 2000-179371.
Сущность изобретения
Техническая проблема
[0004] Тем не менее, в патентном документе 1 в период с момента нажатия на акселератор до того момента, когда запускается обычный двигатель и электродвигатель-генератор начинает генерацию электроэнергии, транспортное средство должно двигаться только с использованием приводного усилия (приводного усилия электродвигателя), вырабатываемого с использованием электроэнергию, которую может выдавать аккумуляторная батарея. Поскольку существует задержка во времени между выдачей приводного усилия электродвигателя и началом генерации электроэнергии, приводное усилие (крутящий момент привода) не увеличивается со временем и возникает застой. Соответственно, не может быть получено ощущение плавного ускорения или ощущение ускорения, ожидаемое в ответ на нажатие акселератора, и водитель или другие находящиеся в транспортном средстве лица ощущают дискомфорт или разочарование в некоторых случаях.
[0005] Настоящее изобретение было создано с учетом вышеупомянутой проблемы, и его задача состоит в том, чтобы предоставить способ управления транспортным средством и устройство управления транспортным средством, которые позволяют добиваться ощущения плавного ускорения посредством плавно и непрерывно увеличивающегося ускорения G.
Решение проблемы
[0006] Чтобы решить вышеупомянутую проблему, в способе управления транспортным средством согласно одному аспекту настоящего изобретения, когда приводное усилие, которое запрошен выдавать второй электродвигатель, увеличивается в состоянии, при котором двигатель внутреннего сгорания остановлен, приводное усилие, которое выдает второй электродвигатель с использованием электроэнергии, подаваемой аккумуляторной батареей, ограничивают более низким уровнем, чем максимальное приводное усилие, определяемое по электрической мощности, которую аккумуляторная батарея способна подавать для привода снабженного электроприводом транспортного средства. Затем приводное усилие, которое выдает второй электродвигатель, используя подаваемую аккумуляторной батареей электроэнергию, увеличивают с течением времени в период с того момента, когда второй электродвигатель выдает ограниченное более низким уровнем приводное усилие, до того момента, когда двигатель внутреннего сгорания запускается и первый электродвигатель начинает генерацию электроэнергии.
Преимущественные эффекты изобретения
[0007] Способ управления транспортным средством и устройство управления транспортным средством по настоящему изобретению могут добиваться ощущения плавного ускорения посредством плавно и непрерывно увеличивающегося ускорения G.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
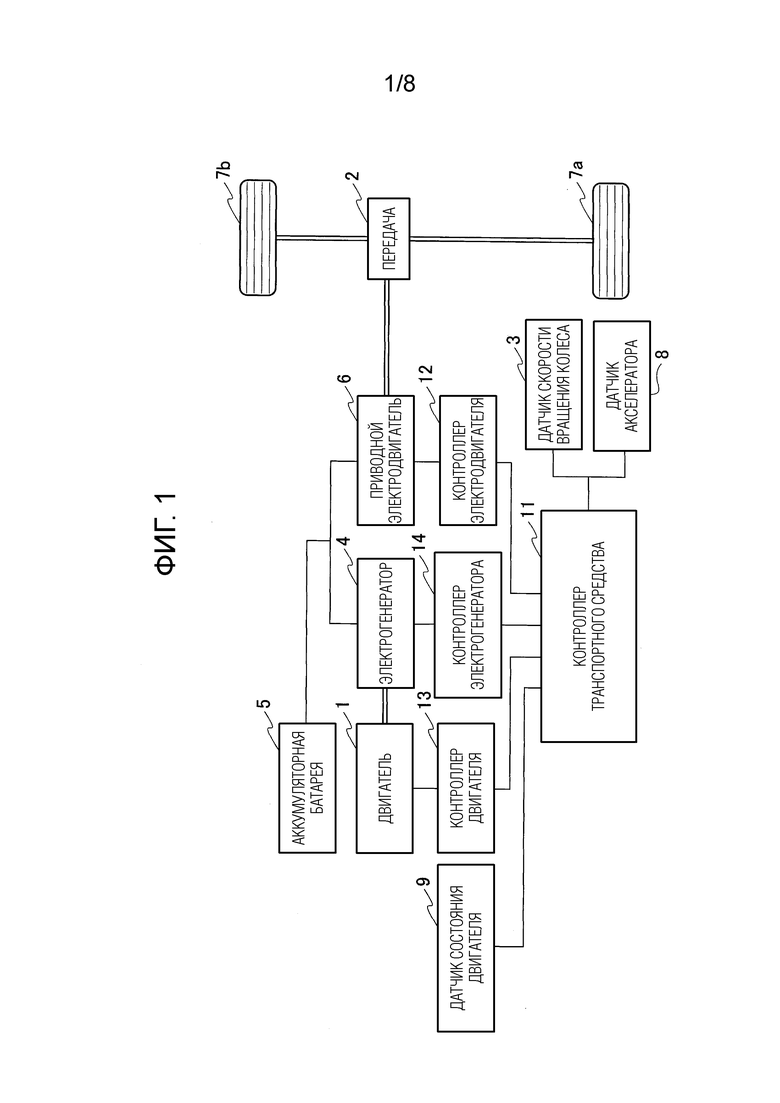
[0008] Фиг. 1 является блок-схемой, иллюстрирующей строение гибридного автомобиля, включающего в себя устройство управления транспортным средством (контроллер 11 транспортного средства) согласно варианту осуществления настоящего изобретения.
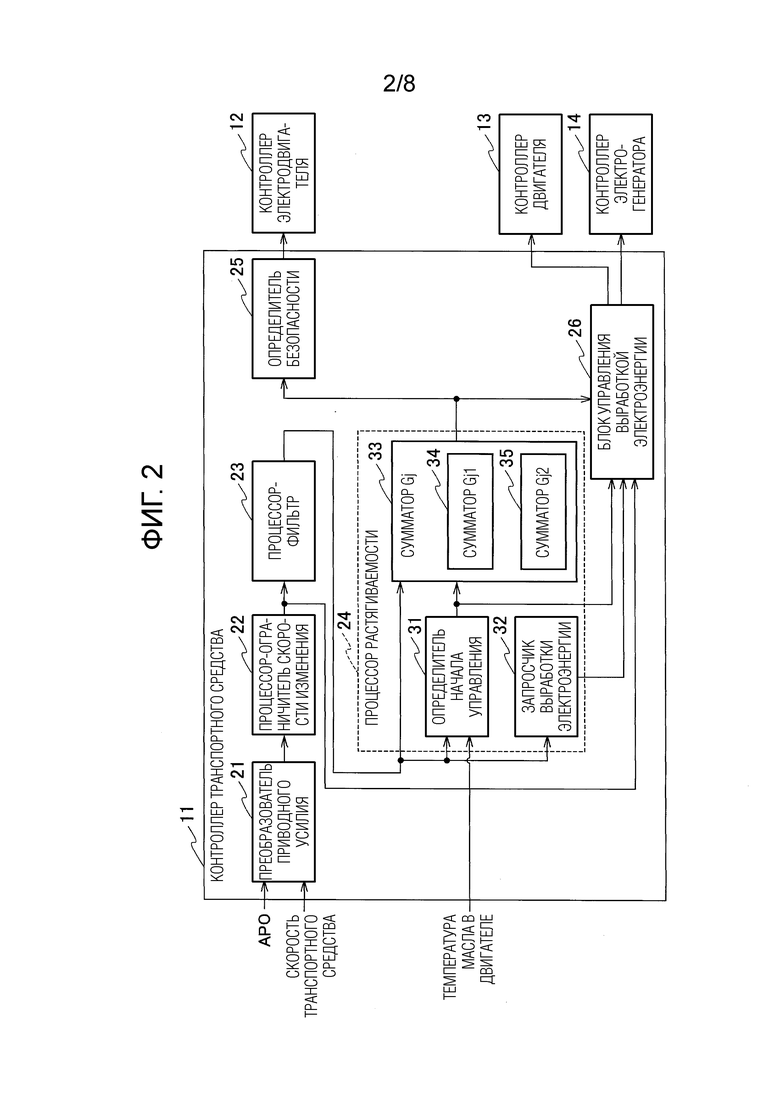
Фиг. 2 является блок-схемой, иллюстрирующей функциональные компоненты, входящие в состав контроллера 11 транспортного средства.
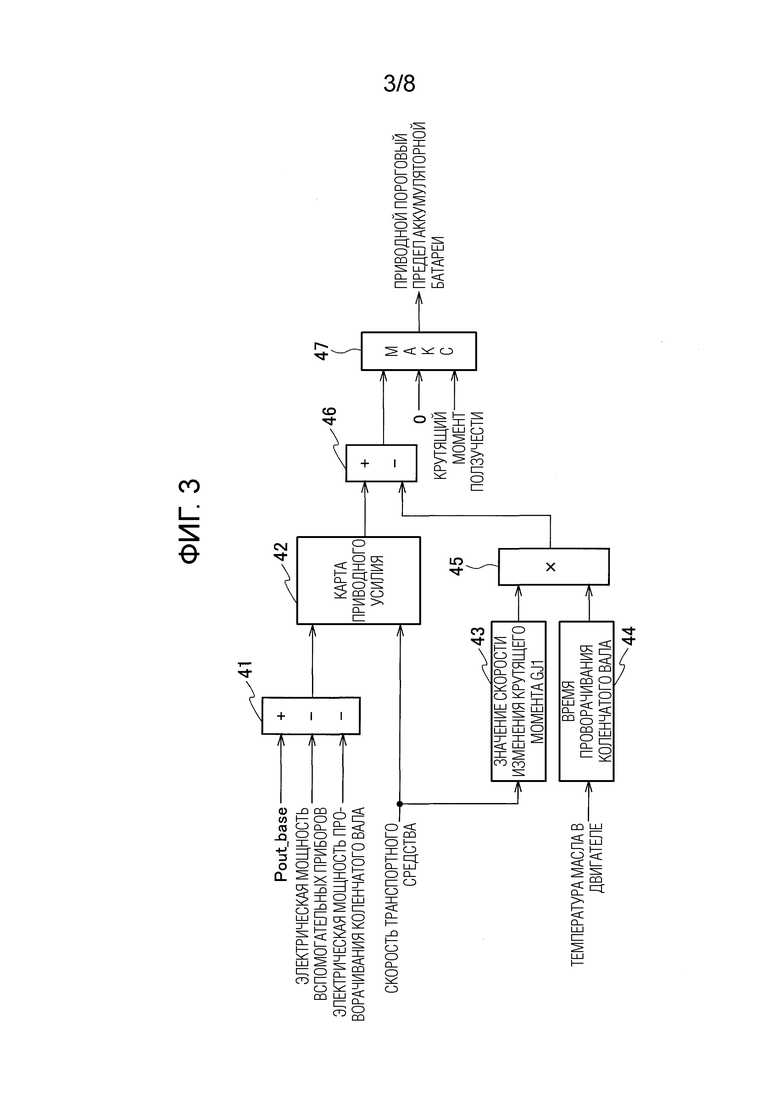
Фиг. 3 является блок-схемой последовательности операций, иллюстрирующей процессы получения предельного порога Ft привода аккумуляторной батареи.
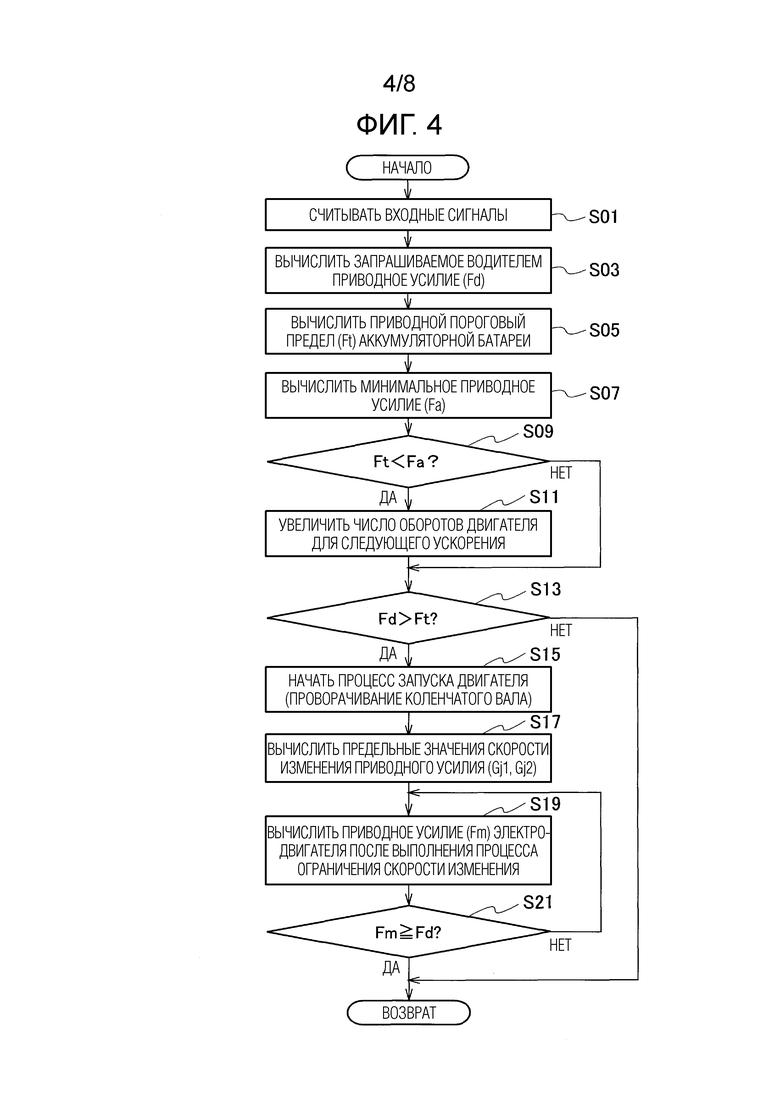
Фиг. 4 является блок-схемой последовательности операций, иллюстрирующей пример работы контроллера 11 транспортного средства на фиг. 2.
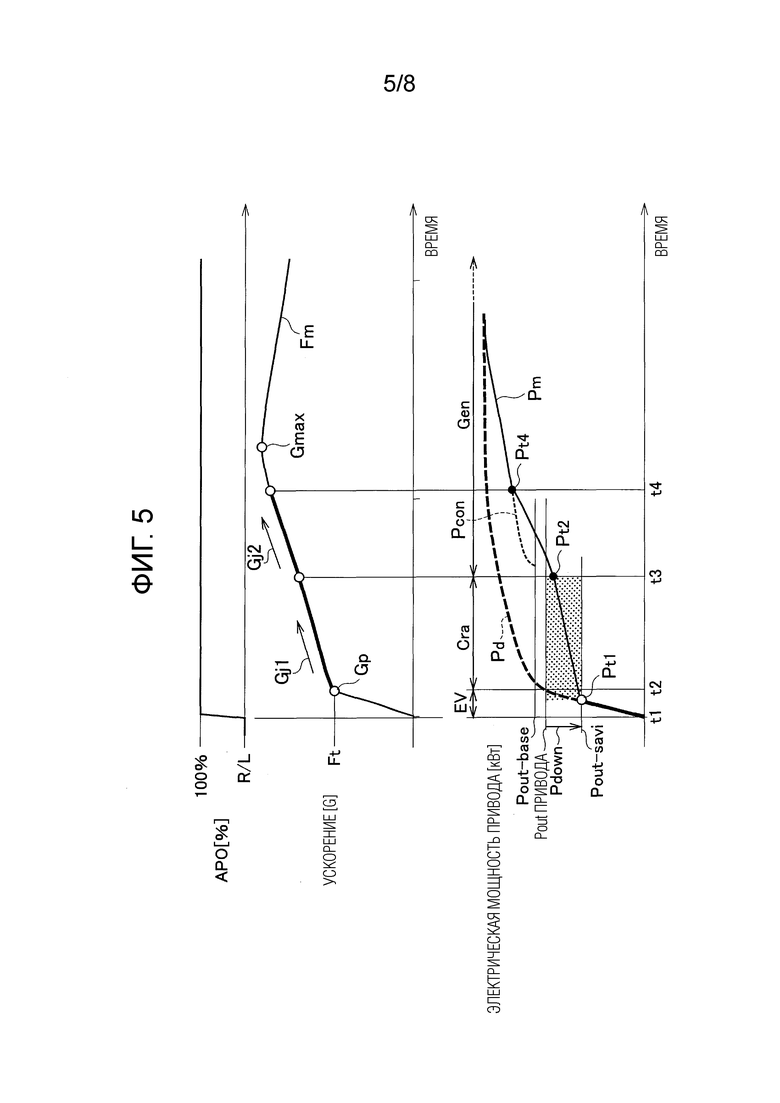
Фиг. 5 - временная диаграмма, иллюстрирующая изменения степени открытия акселератора APO, ускорении снабженного электроприводом транспортного средства и электрической мощности Pm, подаваемой на приводной электродвигатель 6 с течением времени.
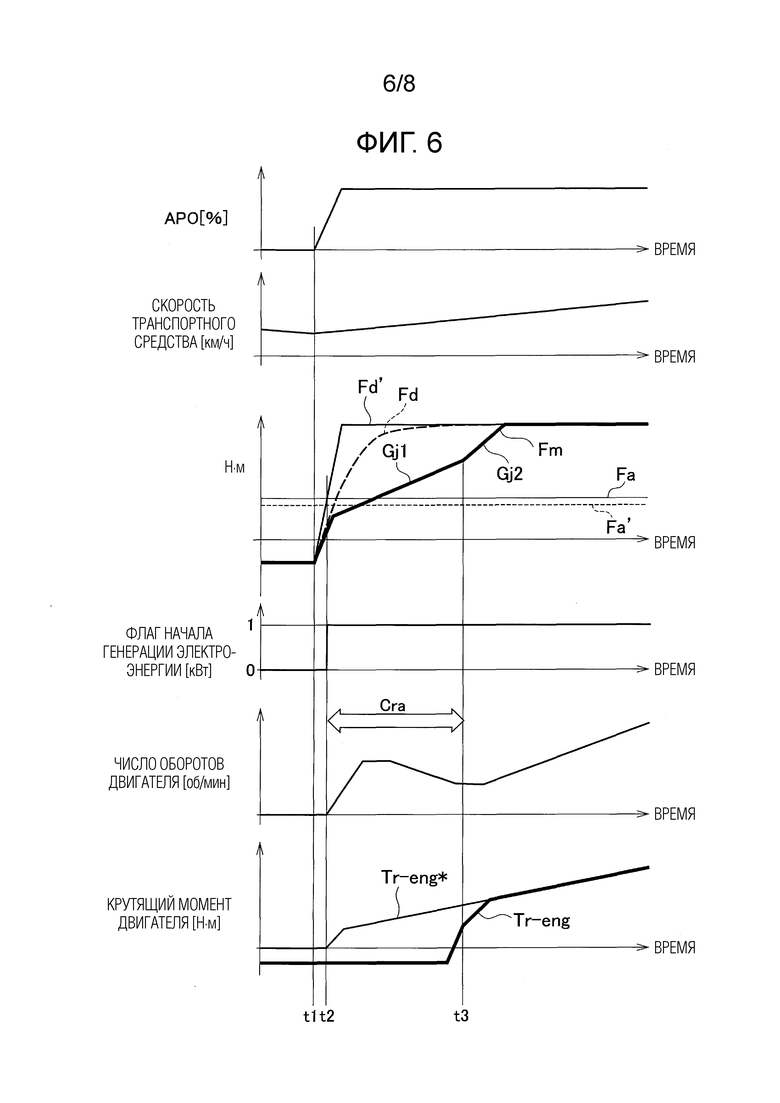
Фиг. 6 - временная диаграмма, иллюстрирующая изменения параметров в соответствии с вариантом осуществления во времени в случае, когда двигатель 1 не вращается.
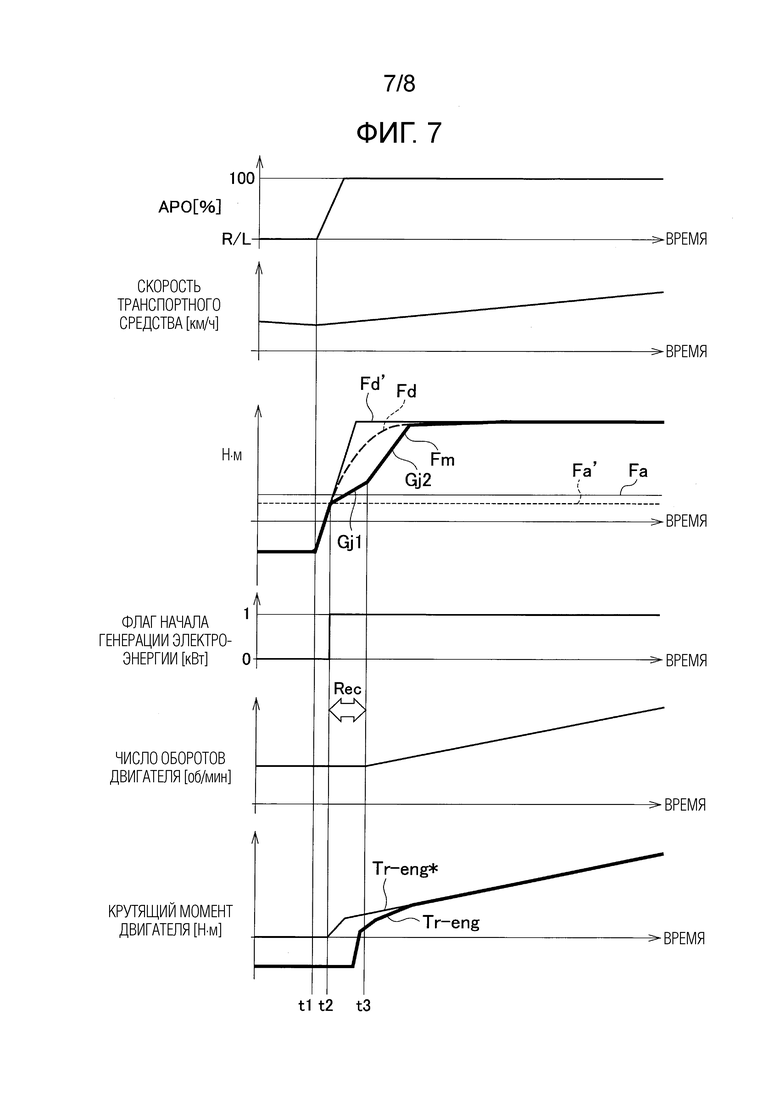
Фиг. 7 - временная диаграмма, иллюстрирующая изменения параметров во времени в соответствии с вариантом осуществления в случае, когда двигатель 1 вращается.
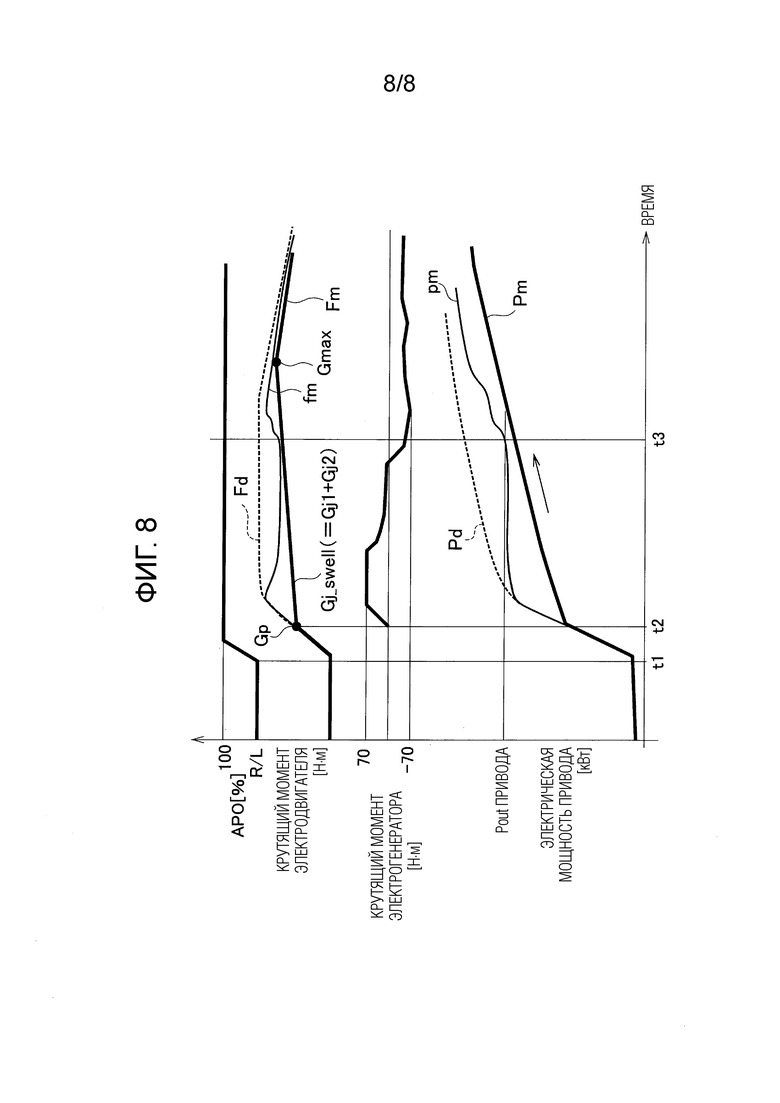
Фиг. 8 - временная диаграмма, поясняющая операции и эффекты варианта осуществления.
Описание вариантов осуществления
[0009] Далее подробно описывается вариант осуществления настоящего изобретения со ссылкой на чертежи. В описании одинаковые части обозначены одинаковыми ссылочными позициями, а дублирующее описание опущено.
[0010] Строение снабженного электроприводом транспортного средства (транспортного средства с электроприводом), в котором установлено устройство управления транспортным средством согласно варианту осуществления, описано со ссылкой на фиг. 1. Снабженное электроприводом транспортное средство по этому варианту осуществления представляет собой автомобиль - последовательный гибрид, включающий в себя: двигатель 1 (двигатель внутреннего сгорания); электрогенератор 4 (первый электродвигатель), механически соединенный с выходным валом двигателя 1; аккумуляторную батарею 5, электрически соединенную с электрогенератором 4; ведущие колеса 7а, 7b, выполненные с возможностью привода снабженного электроприводом транспортного средства; приводной (тяговый) электродвигатель 6 (второй электродвигатель), механически соединенный с ведущими колесами 7а, 7b; контроллер 12 электродвигателя, выполненный с возможностью управления приводным электродвигателем 6; контроллер 14 электрогенератора, выполненный с возможностью управления электрогенератором 4; контроллер 13 двигателя, выполненный с возможностью управления двигателем 1; датчик 9 состояния двигателя, выполненный с возможностью обнаружения состояний двигателя 1, включая число оборотов и температуру масла двигателя 1; датчик 3 скорости вращения колеса, выполненный с возможностью определения скорости вращения колеса; датчик 8 степени открытия акселератора, выполненный с возможностью определения степени открытия акселератора APO; и контроллер 11 транспортного средства, выполненный с возможностью управления всей силовой установкой снабженного электроприводом транспортного средства. В автомобиле - последовательном гибриде двигатель 1 не приводит в движение ведущие колеса 7a, 7b, а приводной электродвигатель 6 приводит в движение ведущие колеса 7a, 7b.
[0011] Выходной вал двигателя 1 механически соединен с входным валом электрогенератора 4. Электрогенератор 4 электрически соединен с аккумуляторной батареей 5 и приводным электродвигателем 6, чтобы иметь возможность обмениваться с ними электрической энергией (высокой мощности). Выходной вал приводного электродвигателя 6 механически соединен с осью через передачу 2, а ось механически соединена с ведущими колесами 7а, 7b.
[0012] Контроллер 12 электродвигателя и приводной электродвигатель 6, контроллер 14 электрогенератора и электрогенератор 4, а также контроллер 13 двигателя и двигатель 1 соединены друг с другом, чтобы иметь возможность обмениваться электрическими сигналами (малой мощности). Кроме того, контроллер 12 электродвигателя, контроллер 14 электрогенератора и контроллер 13 двигателя соединены с контроллером 11 транспортного средства, чтобы иметь возможность обмениваться с ним электрическими сигналами (малой мощности).
[0013] Датчик 9 состояния двигателя отправляет обнаруженные состояния двигателя контроллеру 11 транспортного средства в виде электрических сигналов. Датчик 9 состояния двигателя включает в себя датчик обнаружения температуры масла в двигателе и датчик обнаружения частоты вращения двигателя. Датчик 3 скорости вращения колеса отправляет обнаруженную скорость вращения колеса контроллеру 11 транспортного средства в виде электрических сигналов. Датчик 8 степени открытия акселератора отправляет обнаруженную степень открытия акселератора APO контроллеру 11 транспортного средства в виде электрических сигналов.
[0014] Приводное усилие двигателя 1 передается на электрогенератор 4, и электрогенератор 4 вырабатывает электрическую энергию, используя приводное усилие двигателя 1. Электроэнергия, вырабатываемая электрогенератором 4, передается на приводной электродвигатель 6 или накапливается в аккумуляторной батарее 5. Электрическая энергия, накопленная в аккумуляторной батарее 5, передается на приводной электродвигатель 6, и приводной электродвигатель 6 приводится в действие электрической энергией, хранящейся в аккумуляторной батарее 5, и электрической энергией, генерируемой электрогенератором 4. Приводное усилие приводного электродвигателя 6 передается на ведущие колеса 7a, 7b через передачу 2 и ось. Ведущие колеса 7a, 7b вращаются под действием приводного усилия приводного электродвигателя 6, и снабженное электроприводом транспортное средство (в дальнейшем именуемое вкратце транспортным средством) движется.
[0015] Контроллер 11 транспортного средства функционирует в качестве устройства управления транспортным средством согласно варианту осуществления.
[0016] Например, контроллер 11 транспортного средства может быть реализован универсальным микрокомпьютером, включающим в себя центральный процессор (ЦП), память и блок ввода-вывода. В микрокомпьютере установлена и выполняется компьютерная программа (программа управления транспортным средством), которая заставляет микрокомпьютер функционировать в качестве контроллера 11 транспортного средства. Таким образом, универсальный микрокомпьютер выполняет функции контроллера 11 транспортного средства. Следует отметить, что, хотя здесь описан пример, в котором контроллер 11 транспортного средства реализован с помощью программного обеспечения, контроллер 11 транспортного средства может быть выполнен путем подготовки специального аппаратного обеспечения для выполнения следующих информационных процессов, как само собой разумеется. Кроме того, несколько блоков (с 21 по 26 и с 31 по 35), входящих в состав контроллера 11 транспортного средства, могут быть выполнены из отдельных деталей аппаратного обеспечения. Кроме того, в дополнение к контроллеру 11 транспортного средства контроллер 12 электродвигателя, контроллер 14 электрогенератора и контроллер 13 двигателя могут быть аналогичным образом реализованы с помощью программного обеспечения или специального аппаратного обеспечения. Кроме того, электронный блок управления (ЭБУ), используемый для другого управления, относящегося к транспортному средству, может также служить в качестве контроллера 11 транспортного средства, контроллера 12 электродвигателя, контроллера 14 электрогенератора и контроллера 13 двигателя.
[0017] Функциональные компоненты, входящие в состав контроллера 11 транспортного средства, описаны со ссылкой на фиг. 2. Контроллер 11 транспортного средства включает в себя преобразователь 21 приводного усилия, процессор-ограничитель 22 скорости изменения, процессор-фильтр 23, процессор 24 растягиваемости, определитель 25 безопасности и блок 26 управления выработкой электроэнергии. Процессор 24 растягиваемости включает в себя определитель 31 начала управления, запросчик 32 выработки электроэнергии и сумматор 33 Gj. Сумматор 33 Gj включает в себя сумматор 34 Gj1 и сумматор 35 Gj2.
[0018] Преобразователь 21 приводного усилия вычисляет приводное усилие (запрашиваемое водителем приводное усилие), которое водитель запрашивает выдать из приводного электродвигателя 6, по степени открытия акселератора APO, обнаруженной датчиком 8 степени открытия акселератора, и скорости вращения колеса, обнаруженной датчиком 3 скорости вращения колеса. Контроллер 11 транспортного средства заранее имеет непроиллюстрированную карту приводного усилия. Карта приводного усилия является графиком, изображающим взаимосвязи между скоростью транспортного средства и запрашиваемым водителем приводным усилием, и контроллер 11 транспортного средства имеет карту приводного усилия для каждой степени открытия акселератора.
[0019] Процессор-ограничитель 22 скорости изменения выполняет процесс ограничения скорости изменения, добавляя определенный предел к скорости изменения запрашиваемого водителем приводного усилия и делая изменения в запрашиваемом водителем приводном усилии более плавными, чтобы подавить резкие изменения запрашиваемого водителем приводного усилия. После этого процессор-фильтр 23 выполняет процесс фильтрации нижних частот над запрашиваемым водителем приводным усилием, чтобы сделать изменения запрашиваемого водителем приводного усилия еще более плавными.
[0020] Запрашиваемое водителем приводное усилие, подвергнутое процессу фильтрации, вводится в процессор 24 растягиваемости. «Растягиваемость» представляет собой явление, при котором невозможно получить ощущение плавного ускорения или ощущение ускорения, ожидаемое в ответ на нажатие акселератора. «Растягиваемость» описана позже со ссылкой на график по фиг. 8.
[0021] Чтобы подавить растягиваемость, сначала процессор 24 растягиваемости ограничивает приводное усилие Fm, выдаваемое приводным электродвигателем 6, до более низкого уровня, чем максимальное приводное усилие, определяемое по электрической мощности (Pout привода), которая может подаваться аккумуляторной батареей 5 для привода транспортного средства.
[0022] В частности, как показано на фиг. 5, значение, полученное вычитанием электрической мощности (электрической мощности вспомогательных приборов), потребляемой установленными в транспортном средстве вспомогательными приборами, такими как кондиционер воздуха, аудиоустройство и тому подобное, и электрической мощности (электрической мощности запуска двигателя), необходимой для запуска двигателя 1, из базовой электрической мощности Pout_base, которая может подаваться аккумуляторной батареей 5, является той электрической мощностью (Pout привода), которая может подаваться аккумуляторной батареей 5 в качестве приводного усилия транспортного средства. Pout привода соответствует электрической мощности, которая может подаваться аккумуляторной батареей 5 для приведения в движение транспортного средства.
[0023] Следует отметить, что в состоянии, при котором двигатель не вращается, электрическая мощность запуска двигателя соответствует электрической мощности (электрической мощности проворачивания коленчатого вала), необходимой для процесса проворачивания коленчатого вала двигателя 1. В состоянии, при котором двигатель уже вращается, электрическая мощность запуска двигателя соответствует электрической мощности (электрической мощности восстановления), необходимой для процесса восстановления оборотов двигателя 1.
[0024] Как показано на фиг. 5, процессор 24 растягиваемости вызывает экономичную электрическую мощность Pou_savi, ограниченную более низким уровнем, чем Pout привода, которая подается от аккумуляторной батареи 5 к приводному электродвигателю 6. Таким образом, приводное усилие Fm, выдаваемое приводным электродвигателем 6, ограничивается приводным пороговым пределом Ft аккумуляторной батареи, более низким, чем максимальное приводное усилие, определяемое по электрической мощности, которая может подаваться аккумуляторной батареей 5 для привода транспортного средства.
[0025] Далее, как показано стрелкой Gj1 (первый градиент) на фиг. 5, процессор 24 растягиваемости увеличивает приводное усилие Fm, выдаваемое приводным электродвигателем 6, используя подаваемую аккумуляторной батареей 5 электрическую мощность, с течением времени в период от момента, когда приводной электродвигатель 6 выдает приводное усилие, ограниченное более низким уровнем (приводным пороговым пределом Ft аккумуляторной батареи), до момента (t3), когда двигатель 1 запускается и электрогенератор 4 начинает выработку электроэнергии.
[0026] В частности, как показано на фиг. 5, после того, как электрическая мощность Pm, подаваемая от аккумуляторной батареи 5 к приводному электродвигателю 6, достигает экономичной электрической мощности Pou_savi, процессор 24 растягиваемости со временем увеличивает электрическую мощность Pm, подаваемую от аккумуляторной батареи 5 к приводному электродвигателю 6. Таким образом, приводное усилие Fm, выдаваемое приводным электродвигателем 6 с использованием электроэнергии, подаваемой аккумуляторной батареей 5, может со временем увеличиваться, как показано градиентом Gj1 на фиг. 5. Скорость увеличения электрической мощности Pm от электрической мощности Pt1 до электрической мощности Pt2 можно рассчитать по градиенту Gj1 на фиг. 5 и скорости транспортного средства.
[0027] Процессор 24 растягиваемости устанавливает экономичную электрическую мощность Pou_savi и скорость увеличения электрической мощности Pm от электрической энергии Pt1 до электрической мощности Pt2 так, что электрическая мощность Pt2 при запуске двигателя 1 и начале выработки электроэнергии электрогенератором 4 (t3) не превышает мощность Pout привода. Таким образом, электрическая мощность Pm, подаваемая от аккумуляторной батареи 5 к приводному электродвигателю 6, может увеличиваться с течением времени в период (от t1 до t3) от момента нажатия акселератора до момента запуска двигателя 1 и начала выработки электроэнергии электрогенератором 4. Таким образом, приводное усилие (приводной крутящий момент) увеличивается со временем без застоя. Соответственно, ускорение G плавно и непрерывно увеличивается, и это обеспечивает ощущение плавного ускорения. Получается ощущение плавного ускорения или ощущение ускорения, ожидаемое в ответ на нажатие акселератора, а растягиваемость подавляется. Таким образом устраняется дискомфорт или разочарование, которое может испытывать водитель или другие находящиеся в транспортном средстве лица.
[0028] Процессор 24 растягиваемости может устанавливать экономичную электрическую мощность Pou_savi равной значению, полученному вычитанием избыточной электрической мощности Pdown, определяемой в зависимости от времени, необходимого для запуска двигателя 1, из мощности Pout привода. Таким образом, приводной пороговый предел Ft аккумуляторной батареи может быть установлен равным значению, полученному вычитанием избыточного приводного усилия, определяемого в зависимости от времени, необходимого для запуска двигателя 1, из максимального приводного усилия, определяемого по электрической мощности, которая может быть подана аккумуляторной батареей 5 для привода транспортного средства. Таким образом, приводной пороговый предел Ft аккумуляторной батареи может быть точно оценен. Следует отметить, что время, требуемое для запуска двигателя 1 (период проворачивания коленчатого вала Cra), - это время (от t2 до t3), необходимое для определения запуска двигателя 1 и процесса проворачивания коленчатого вала двигателя 1. Период проворачивания коленчатого вала Cra может быть оценен на основе температуры масла в двигателе. «EV» на фиг. 5 обозначает состояние EV перед определением запуска двигателя 1, а «Gen» обозначает состояние выработки электроэнергии после запуска двигателя 1.
[0029] Процессор 24 растягиваемости может определять избыточную электрическую мощность Pdown с обращением не только к времени, необходимому для запуска двигателя 1, но и к скорости увеличения электрической мощности Pm. Другими словами, процессор 24 растягиваемости может устанавливать экономичную электрическую мощность Pou_savi на значение, полученное вычитанием избыточной электрической мощности Pdown, определяемой на основе времени, необходимого для запуска двигателя 1, и скорости увеличения электрической мощности Pm, из мощности Pout привода. В частности, процессор 24 растягиваемости вычисляет избыточную электрическую мощность Pdown путем умножения скорости увеличения электрической мощности Pm на время, необходимое для запуска двигателя 1. Таким образом, приводной пороговый предел Ft аккумуляторной батареи может быть установлен равным значению, полученному вычитанием избыточного приводного усилия, определяемого в зависимости от времени, необходимого для запуска двигателя 1, и первого градиента (Gj1) приводного усилия, из максимального приводного усилия, определяемого по электрической мощности, которая может подаваться аккумуляторной батареей 5 для привода транспортного средства. Таким образом, приводной пороговый предел Ft аккумуляторной батареи может быть оценен более точно.
[0030] Максимальным значением электрической мощности, которая может быть подана на приводной электродвигатель 6 до запуска двигателя 1 и начала выработки электроэнергии электрогенератором 4 (до момента t3), является мощность Pout привода. Между тем, после запуска двигателя 1 и начала выработки электроэнергии электрогенератором 4 (с момента t3), вырабатываемая электрогенератором 4 электрическая мощность Pcon прибавляется к мощности Pout привода. Соответственно, на приводной электродвигатель 6 может подаваться электрическая мощность, равная или превышающая Pout привода. Тогда электрическая мощность Pm, подаваемая на приводной электродвигатель 6, устанавливается близкой к запрашиваемой водителем электрической мощности Pd посредством управления числом оборотов двигателя 1 для увеличения электрической мощности Pcon. Увеличение электрической мощности Pm с течением времени без застоя также после запуска двигателя 1 и начала выработки электроэнергии электрогенератором 4 (с момента t3) позволяет плавно увеличивать приводное усилие Fm (крутящий момент привода) до его максимального значения Gmax со временем без застоя.
[0031] Далее описаны подробные функциональные конфигурации процессора 24 растягиваемости.
[0032] Во-первых, когда приводное усилие (запрашиваемое водителем приводное усилие), которое запрошен выдавать приводной электродвигатель 6, равно заданному приводному пороговому пределу Ft аккумуляторной батареи или превышает приводной пороговый предел Ft аккумуляторной батареи, определитель 31 начала управления определяет, что может произойти растягиваемость, и начинает процесс подавления растягиваемости. В частности, чем выше степень открытия акселератора APO, тем выше приводное усилие Fm, которое запрашивается выдавать приводной электродвигатель 6. Когда запрашиваемое водителем приводное усилие равно или превышает приводной пороговый предел Ft аккумуляторной батареи, определитель 31 начала управления начинает процесс запуска двигателя 1. Когда приводное усилие Fm меньше приводного порогового предела Ft аккумуляторной батареи, определитель 31 начала управления не начинает процесс запуска двигателя 1. Таким образом, может быть надлежащим образом определена необходимость запуска двигателя 1. Следует отметить, что в этом случае топливо не подается в двигатель 1, и двигатель 1 не находится в состоянии сгорания. Кроме того, выходной вал двигателя 1 не вращается, и двигатель 1 находится в остановленном состоянии.
[0033] Кроме того, когда приводное усилие Fm, которое запрошен выдавать приводной электродвигатель 6, становится ниже приводного порогового предела Ft аккумуляторной батареи после начала процесса запуска двигателя 1, определитель 31 начала управления приостанавливает процесс запуска двигателя 1. Это соответствует, например, случаю, когда акселератор нажимают и затем отпускают. Таким образом, может быть соответствующим образом определена необходимость запуска двигателя 1. Следует отметить, что приводной пороговый предел Ft аккумуляторной батареи, используемый при определении начала и приостановки процесса запуска двигателя 1, желательно имеет определенный гистерезис, чтобы подавлять поиск и стабилизировать управление запуском двигателя 1.
[0034] Определитель 31 начала управления выводит результат определения запуска двигателя на сумматор 33 Gj и блок 26 управления выработкой электроэнергии в качестве флага определения начала. В то же время определитель 31 начала управления выводит время, необходимое для запуска двигателя 1 (время проворачивания коленчатого вала), на сумматор 33 Gj и блок 26 управления выработкой электроэнергии.
[0035] Сумматор 34 Gj1 рассчитывает приводной пороговый предел Ft аккумуляторной батареи. В частности, сумматор 34 Gj1 вычисляет избыточную электрическую мощность Pdown по времени проворачивания коленчатого вала, полученному из температуры масла в двигателе. Затем сумматор 34 Gj1 вычитает избыточную электрическую мощность Pdown из Pout привода, чтобы получить экономичную электрическую мощность Pou_savi, и рассчитывает приводной пороговый предел Ft аккумуляторной батареи по экономичной электрической мощности Pou_savi и скорости транспортного средства.
[0036] Сумматор 34 Gj1 увеличивает приводное усилие Fm при первом градиенте (Gj1) после того, как приводное усилие Fm достигает приводного порогового предела Ft аккумуляторной батареи. Увеличение приводного усилия Fm при первом градиенте (Gj1) выполняют до тех пор, пока двигатель 1 не запустится (до момента t3). Величина увеличения приводного усилия Fm при первом градиенте (Gj1) соответствует избыточному приводному усилию, определяемому в зависимости от времени, необходимого для запуска двигателя 1, и для этого увеличения используется избыточная электрическая мощность Pdown. Сумматор 34 Gj1 рассчитывает скорость увеличения электрической мощности Pm, необходимую для увеличения приводного усилия Fm при первом градиенте (Gj1).
[0037] Сумматор 35 Gj2 увеличивает приводное усилие Fm при втором градиенте (Gj2) после запуска двигателя 1 (с момента t3). Электрическая мощность (потребляемая электрическая мощность Pcon), генерируемая электрогенератором 4, используется для увеличения приводного усилия Fm при втором градиенте (Gj2). Сумматор 35 Gj2 рассчитывает скорость увеличения потребляемой электрической мощности Pcon, необходимую для увеличения приводного усилия Fm при втором градиенте (Gj2).
[0038] Сумматор 33 Gj отправляет экономичную электрическую мощность Pou_savi, скорость увеличения электрической мощности Pm, необходимую для увеличения приводного усилия Fm при первом градиенте (Gj1), и скорость увеличения потребляемой электрической мощности Pcon, необходимую для увеличения приводного усилия Fm при втором градиенте (Gj2), определителю 25 безопасности и блоку 26 управления выработкой электроэнергии.
[0039] Когда приводной пороговый предел Ft аккумуляторной батареи ниже заданного минимального приводного усилия Fa, запросчик 32 выработки электроэнергии запрашивает вращение выходного вала двигателя 1. Низкая наружная температура, плохое состояние заряда (SOC) аккумуляторной батареи 5 или ухудшение качества аккумуляторной батареи 5 приводят к уменьшению Pout привода, а значит, также приводят к уменьшению приводного порогового предела Ft аккумуляторной батареи. Поскольку вероятность запроса выработки электроэнергии у электрогенератора 4 увеличивается с таким уменьшением, выходной вал двигателя 1 поворачивают заранее, чтобы подготовиться к будущему запросу на выработку электроэнергии. Предварительное вращение выходного вала может сократить время, необходимое для запуска двигателя 1, по сравнению с таковым в состоянии, при котором выходной вал не вращается. В этом случае «вращение выходного вала» является понятием, включающим не только управление запуском, при котором топливо подается в двигатель и двигатель запускается, но и управление прокруткой, при котором электрогенератор 4 принудительно прокручивает вращающийся вал двигателя 1, к которому подача топлива отключена.
[0040] Запросчик 32 выработки электроэнергии заранее ограничивает число оборотов при вращении выходного вала двигателя 1 числом оборотов, требуемым электрогенератору 4, чтобы генерировать заданную минимальную электрическую мощность генерации. Это число оборотов является числом оборотов, при котором электрогенератор 4 может генерировать минимальную электрическую мощность генерации, когда электропитание вырабатывается при максимальном крутящем моменте двигателя. Другими словами, минимальное значение числа оборотов при вращении выходного вала двигателя 1 заранее устанавливается на число оборотов, необходимое электрогенератору 4 для генерирования заданной минимальной электрической мощности генерации. Таким образом, могут быть обеспечены топливо, подаваемое в двигатель 1 для вращения, и электрическая мощность, потребляемая электрогенератором 4.
[0041] Запросчик 32 выработки электроэнергии может определять заданную минимальную электрическую мощность генерации из поставляемой аккумуляторной батареей электрической мощности и приводного усилия, которое вызывает изменение ускорения в заданной или большей степени. В частности, запросчик 32 выработки электроэнергии устанавливает разность между электрической мощностью, поставляемой от аккумуляторной батареи, и электрической мощностью генерации, необходимой приводному электродвигателю 6 для выдачи приводного усилия, которое вызывает заранее заданную величину изменения ускорения, в качестве заданного минимального значения электрической мощности генерации. Это может предотвратить расстройство, при котором, когда величина изменения ускорения мала, водитель не может почувствовать ожидаемое ускорение G транспортного средства в ответ на нажатие акселератора.
[0042] Запросчик 32 выработки электроэнергии устанавливает максимальную электрическую мощность генерации, которая является максимальным значением электрической мощности, генерируемой электрогенератором 4, так что избыточная электрическая мощность, полученная вычитанием используемой в транспортном средстве электрической мощности из электрической мощности, вырабатываемой электрогенератором 4, равна или меньше электрической мощности, которая может быть накоплена в аккумуляторной батарее 5. Другими словами, запросчик 32 выработки электроэнергии может определять максимальную электрическую мощность генерации по электроэнергии, которая может храниться в аккумуляторной батарее 5. Электрическая мощность, генерируемая электрогенератором 4, ограничена максимальной электрической мощностью генерации или меньше. В частности, запросчик 32 выработки электроэнергии устанавливает заданное максимальное значение электрической мощности генерации для электроэнергии, вырабатываемой электрогенератором 4, так что избыточная электрическая мощность, полученная, когда вырабатываемая электрическая мощность превышает используемую в транспортном средстве электрическую мощность, может быть сделана меньшей, чем электрическая мощность, которая может храниться в аккумуляторной батарее 5. В этом случае, чем ниже электрическая мощность, которая может храниться в аккумуляторной батарее 5, тем ниже максимальная электрическая мощность генерации. Это может преимущественно предотвращать чрезмерную зарядку аккумуляторной батареи 5. Когда «электрическая мощность, которая может храниться в аккумуляторной батарее 5», является низкой, чрезмерную зарядку аккумуляторной батареи 5 предотвращают, отдавая предпочтение перед разочарованием, при котором водитель не может почувствовать ускорение G транспортного средства, ожидаемое в ответ на нажатие акселератора, чтобы подавить возникновение сбоя в аккумуляторной батарее 5.
[0043] Запросчик 32 выработки электроэнергии отправляет запрос на вращение выходного вала двигателя 1, максимальную электрическую мощность генерации и минимальную электрическую мощность генерации в блок 26 управления выработкой электроэнергии.
[0044] Определитель 25 безопасности определяет, удовлетворяют ли экономичная электрическая мощность Pou_savi, скорость увеличения электрической мощности Pm, необходимая для увеличения приводного усилия Fm при первом градиенте (Gj1), и скорость увеличения потребляемой электрической мощности Pcon, необходимая для увеличения приводного усилия Fm при втором градиенте (Gj2), условиям безопасной работы приводного электродвигателя 6, и выполняет процессы, необходимые для безопасной работы с этими параметрами. После выполнения этих определения и процессов определитель 25 безопасности дает команду контроллеру 12 электродвигателя об экономичной электрической мощности Pou_savi, скорости увеличения электрической мощности Pm, необходимой для увеличения приводного усилия Fm при первом градиенте (Gj1), и скорости увеличения потребляемой электрической мощности Pcon, необходимой для увеличения приводного усилия Fm при втором градиенте (Gj2).
[0045] Блок 26 управления выработкой электроэнергии дает команду контроллеру 13 двигателя запустить двигатель 1 и дает команду контроллеру 13 двигателя о числе оборотов двигателя на основе скорости увеличения потребляемой электрической мощности Pcon, необходимой для увеличения приводного усилия Fm при втором градиенте (Gj2). Блок 26 управления выработкой электроэнергии дает команду контроллеру 14 электрогенератора вращать выходной вал двигателя 1 под управлением прокруткой.
[0046] Далее описываются процессы, в которых процессор 24 растягиваемости получает приводной пороговый предел Ft аккумуляторной батареи, со ссылкой на блок-схему последовательности операций по фиг. 3.
[0047] В процессе 41 процессор 24 растягиваемости получает Pout привода вычитанием электрической мощности (электрической мощности вспомогательных приборов), потребляемой вспомогательными приборами, и электрической мощности проворачивания коленчатого вала (или электрической мощности восстановления) из базовой электрической мощности Pout_base.
[0048] В процессе 42 процессор 24 растягиваемости получает приводное усилие (крутящий момент привода) транспортного средства, полученное из Pout привода, из скорости транспортного средства и Pout привода, используя карту приводного усилия.
[0049] В процессе 45 процессор 24 растягиваемости получает избыточное приводное усилие, умножая первый градиент Gj1 (значение 43 скорости изменения крутящего момента Gj1) на время, необходимое для запуска двигателя 1 (время 44 проворачивания коленчатого вала). В процессе 46 процессор 24 растягиваемости получает приводной пороговый предел Ft аккумуляторной батареи, вычитая избыточное приводное усилие из приводного усилия транспортного средства, полученного из Pout привода.
[0050] В процессе 47 процессор 24 растягиваемости сравнивает приводной пороговый предел Ft аккумуляторной батареи, крутящий момент ползучести и ноль и выбирает наибольшее значение из этих значений. Другими словами, процессор 24 растягиваемости устанавливает приводной пороговый предел Ft аккумуляторной батареи на значение со стороны силовой работы и большее, чем приводное усилие, выдаваемое приводным электродвигателем 6 в состоянии, когда акселератор транспортного средства выключен. Это может помешать двигателю 1 продолжать работать в выключенном состоянии акселератора. Кроме того, приводной электродвигатель 6 может поддерживаться в состоянии, при котором приводной электродвигатель 6 выдает положительный крутящий момент, то есть в состоянии силовой работы.
[0051] Процессор 24 растягиваемости может получать приводной пороговый предел Ft аккумуляторной батареи посредством вышеупомянутых процессов.
[0052] Пример работы (способ управления транспортным средством) контроллера 11 транспортного средства на фиг. 2 поясняется со ссылкой на блок-схему последовательности операций на фиг. 4.
[0053] На этапе S01 контроллер 11 транспортного средства считывает входные сигналы, указывающие степень открытия акселератора APO, положение переключения, скорость транспортного средства, температуру масла в двигателе, состояние заряда (SOC) аккумуляторной батареи 5 и базовую электрическую мощность Pout_base.
[0054] Переходя к этапу S03, контроллер 11 транспортного средства вычисляет запрашиваемое водителем приводное усилие Fd на основе степени открытия акселератора, скорости транспортного средства и положения переключения. Переходя к этапу S05, контроллер 11 транспортного средства вычисляет приводной пороговый предел Ft аккумуляторной батареи и, переходя к этапу S07, вычисляет минимальное приводное усилие Fa.
[0055] Переходя к этапу S09, контроллер 11 транспортного средства (запросчик 32 выработки электроэнергии) определяет, является ли приводной пороговый предел Ft аккумуляторной батареи более низким, чем минимальное приводное усилие Fa. Когда результатом этого определения является «да» (ДА на этапе S09), операция переходит к этапу S11, а когда результатом этого определения является «нет» (НЕТ на этапе S09), операция переходит к этапу S13.
[0056] На этапе S11 контроллер 11 транспортного средства (запросчик 32 выработки электроэнергии) запрашивает вращение выходного вала двигателя 1. Поскольку вероятность запроса выработки электроэнергии у электрогенератора 4 возрастает, когда приводной пороговый предел Ft аккумуляторной батареи низок, выходной вал двигателя 1 поворачивают заранее, чтобы подготовиться к будущему запросу выработки электроэнергии. После этого операция переходит к этапу S13.
[0057] На этапе S13 контроллер 11 транспортного средства определяет, является ли запрашиваемое водителем приводное усилие Fd более высоким, чем приводной пороговый предел Ft аккумуляторной батареи. Когда результатом этого определения является «да» (ДА на этапе S13), контроллер 11 транспортного средства определяет, что существует вероятность возникновения растягиваемости, и заставляет операцию перейти к этапу S15. Между тем, когда результатом этого определения является «нет» («Нет» на этапе S13), контроллер 11 транспортного средства определяет, что вероятность возникновения растягиваемости отсутствует, и последовательность операций по фиг. 4 завершается.
[0058] На этапе S15 контроллер 11 транспортного средства начинает процесс подавления растягиваемости, в частности, процесс запуска двигателя 1 (процесс проворачивания коленчатого вала или процесс восстановления). На этапе S17 контроллер 11 транспортного средства вычисляет предельные значения скорости изменения приводного усилия (Gj1, Gj2), обращаясь к скорости транспортного средства. Перед этапом S19 сумматор 33 Gj вычисляет приводное усилие Fm, подвергнутое процессу ограничения скорости изменения, в котором ограничивают градиенты (Gj1, Gj2) приводного усилия при ускорении.
[0059] Переходя к этапу S21, контроллер 11 транспортного средства определяет, достигло ли приводное усилие Fm запрашиваемого водителем приводного усилия Fd. Когда результатом этого определения является «да» (ДА на этапе S21), управление контроллером 11 транспортного средства прекращается. Когда результатом этого определения является «нет» (НЕТ на этапе S21), операция возвращается к этапу S19.
[0060] Изменения в соответствующих параметрах во времени, когда акселератор нажимают в состоянии, при котором двигатель 1 не вращается (пример «состояния, при котором двигатель 1 остановлен»), описаны со ссылкой на временную диаграмму по фиг. 6. Степень открытия акселератора APO увеличивается вследствие нажатия акселератора (t1). В ответ на это запрашиваемые водителем приводные усилия (Fd, Fd') увеличиваются. Запрашиваемое водителем приводное усилие Fd является параметром, полученным путем подвергания запрашиваемого водителем приводного усилия Fd' процессу ограничения скорости изменения, выполняемому процессором-ограничителем 22 скорости изменения и процессором-фильтром 23.
[0061] Приводное усилие Fm, выдаваемое приводным электродвигателем 6, также увеличивается в ответ на запрашиваемое водителем приводное усилие Fd после истечения времени отклика. Когда запрашиваемое водителем приводное усилие Fd превышает приводной пороговый предел Ft аккумуляторной батареи (t2), флаг начала генерации электроэнергии изменяется с логического значения 0 на логическое значение 1, и начинается процесс запуска двигателя 1 (период проворачивания коленчатого вала: Cra). Число оборотов двигателя 1 тем самым увеличивается. С этим увеличением увеличивается целевое приводное усилие Tr_eng* двигателя 1. Следует отметить, что в период проворачивания Cra коленчатого вала фактическое приводное усилие Tr_eng, фактически выдаваемое двигателем 1, является отрицательным значением.
[0062] Увеличение приводного усилия Fm ограничено приводным пороговым пределом Ft аккумуляторной батареи (не показан). Приводное усилие Fm, выдаваемое приводным электродвигателем 6, увеличивается при первом градиенте Gj1 в период от того момента, когда приводное усилие Fm достигает приводного порогового предела Ft аккумуляторной батареи, до того момента, когда запускается двигатель 1 (от t2 до t3). Приводное усилие Fm, выдаваемое приводным электродвигателем 6, увеличивается при втором градиенте Gj2 после запуска двигателя 1 (с момента t3). Что касается первого градиента Gj1 и второго градиента Gj2, каждый из которых указывает на величину увеличения приводного усилия Fm за единицу времени, то первый градиент Gj1 устанавливается меньшим, чем второй градиент Gj2.
[0063] Первый градиент Gj1 приводного усилия Fm, выдаваемого приводным электродвигателем 6 в период с того момента, когда приводной электродвигатель 6 выдает приводное усилие, ограниченное нижним уровнем (приводным пороговым пределом Ft аккумуляторной батареи), до того момента, когда двигатель 1 запущен и электрогенератор 4 начинает выработку электроэнергии (от t2 до t3), устанавливают меньшим, чем второй градиент Gj2 приводного усилия, выдаваемого приводным электродвигателем 6 после начала выработки электроэнергии электрогенератором 4 (с момента t3). Тем самым может быть получено ощущение даже более плавного ускорения, и устраняется дискомфорт или разочарование, которые могут испытывать водитель или другие находящиеся в транспортном средстве лица.
[0064] Увеличение приводного усилия Fm при втором градиенте Gj2 продолжается до тех пор, пока приводное усилие Fm не достигнет запрашиваемого водителем приводного усилия Fd. Следует отметить, что после начала выработки электроэнергии электрогенератором 4 (с момента t3) фактическое приводное усилие Tr_eng находится на стороне силовой работы, и число оборотов двигателя увеличивается со временем. Кроме того, скорость транспортного средства увеличивается во времени с генерированием и увеличением приводного усилия Fm.
[0065] Изменения в соответствующих параметрах во времени, когда акселератор нажимают в состоянии, при котором двигатель 1 вращается (другой пример «состояния, при котором двигатель 1 остановлен»), описаны со ссылкой на временную диаграмму по фиг. 7. Процесс запуска двигателя 1 (период восстановления) отличается от того, что на фиг. 6. Период восстановления Rec на фиг. 7 короче, чем период проворачивания Cra коленчатого вала на фиг. 6. Соответственно, время от момента, когда флаг начала генерации электроэнергии изменяется с 0 на 1, до момента, когда начинается генерация электроэнергии (от t2 до t3), короче, чем на фиг. 6, и первый градиент Gj1 приводного усилия Fm больше, чем на фиг. 6. Поскольку второй градиент Gj2 больше первого градиента Gj1, второй градиент Gj2 приводного усилия Fm также больше, чем на фиг. 6. В результате приводное усилие Fm достигает запрашиваемого водителем приводного усилия Fd за более короткое время, чем на фиг. 6. Другие точки временной диаграммы на фиг. 7 такие же, как и на фиг. 6, и их описание опущено. «Состояние, когда двигатель 1 остановлен» означает состояние, при котором двигатель 1 не запущен, то есть состояние, когда топливо не подается в двигатель 1. В «состоянии, при котором двигатель 1 остановлен», не имеет значения, вращается ли выходной вал двигателя 1 или нет.
[0066] Операции и эффекты варианта осуществления описаны со ссылкой на временную диаграмму по фиг. 8. Кривая Pm иллюстрирует изменение электрической мощности pm со временем в соответствии со сравнительным примером, а кривая Pm иллюстрирует изменение электрической мощности Pm со временем согласно варианту осуществления. Кривая fm иллюстрирует изменение приводного усилия (крутящего момента fm привода) со временем согласно сравнительному примеру, а кривая Fm иллюстрирует изменение приводного усилия (крутящего момента Fm привода) со временем согласно варианту осуществления. Электрическая мощность относится к электрической мощности, подаваемой на приводной электродвигатель 6.
[0067] Запрашиваемая водителем электрическая мощность Pd увеличивается и превышает Pout привода вследствие повышения степени открытия акселератора APO. Электрическая мощность pm по сравнительному примеру возрастает до Pout привода вдоль запрашиваемой водителем электрической мощности Pd. Когда электрическая мощность pm увеличивается для Pout привода, двигатель 1 еще не запущен, и поэтому выработка электроэнергии не начинается. Соответственно, электрическая мощность pm по сравнительному примеру стагнирует вокруг Pout привода до тех пор, пока не начнется выработка электроэнергии (с момента t3).
[0068] Соответственно, крутящий момент fm привода согласно сравнительному примеру увеличивается до определенного значения за счет увеличения электрической мощности pm до Pout привода, но затем уменьшается из-за стагнации электрической мощности pm и начинает снова увеличиваться, когда двигатель 1 запущен. Как описано выше, форма кривой, иллюстрирующей изменение крутящего момента fm привода во времени согласно сравнительному примеру, не похожа на форму кривой, иллюстрирующей изменение запрашиваемого водителем приводного усилия Fd со временем. На кривой крутящего момента fm привода согласно сравнительному примеру крутящий момент fm привода повторяет подъем и падение, и нельзя сказать, что крутящий момент fm привода плавно и непрерывно увеличивается. Соответственно, ощущение плавного ускорения или ощущение ускорения, ожидаемое в ответ на нажатие акселератора, не может быть получено, и водитель или другие находящиеся в транспортном средстве лица испытывают дискомфорт или разочарование в некоторых случаях.
[0069] Между тем, электрическая мощность Pm по варианту осуществления увеличивается вдоль запрашиваемой водителем электрической мощности Pd, но увеличение ограничивается более низким значением, чем Pout привода (экономичная электрическая мощность Pou_savi). Затем, в период с того момента, когда электрическая мощность Pm, ограниченная более низким уровнем, чем Pout привода, подается на приводной электродвигатель 6, до того момента, когда двигатель 1 запускается и электрогенератор 4 начинает выработку энергии (от t2 до t3), подаваемую аккумуляторной батареей 5 электрическую мощность Pm вынуждают увеличиваться с течением времени, как показано стрелкой на фиг. 8. В этом случае скорость увеличения электрической мощности Pm и экономичной электрической мощности Pou_savi устанавливают так, что электрическая мощность Pm при запуске двигателя 1 и начале выработки электроэнергии электрогенератором 4 (t3) не больше, чем Pout привода.
[0070] Таким образом, крутящий момент Fm привода согласно варианту осуществления увеличивается со временем без застоя, пока двигатель 1 не запустится (до t3). Форма кривой, иллюстрирующей изменение крутящего момента Fm привода во времени согласно варианту осуществления, аналогична форме кривой, иллюстрирующей изменение запрашиваемого водителем приводного усилия Fd со временем. На кривой крутящего момента Fm привода согласно варианту осуществления крутящий момент Fm привода плавно и непрерывно увеличивается. Соответственно, можно получить ощущение плавного ускорения или ощущение ускорения, ожидаемое в ответ на нажатие акселератора, и подавить дискомфорт или разочарование, испытываемые водителем или другими находящимися в транспортном средстве лицами.
[0071] Хотя содержание настоящего изобретения описано выше в соответствии с вариантом осуществления, специалистам в данной области техники очевидно, что настоящее изобретение не ограничено вышеприведенным описанием, и могут быть проделаны различные модификации и улучшения. Утверждения и чертежи, составляющие часть этого раскрытия, не следует понимать как ограничивающие настоящее изобретение. Различные альтернативные варианты осуществления, примеры и методы работы очевидны специалистам в данной области техники из этого раскрытия.
[0072] Настоящее изобретение включает в себя различные варианты осуществления и т.п., которые не описаны здесь, как само собой разумеется. Соответственно, технический объем настоящего изобретения определяется только теми существенными аспектами, которые характеризуют изобретение согласно формуле изобретения, которая считается подходящей из приведенного выше описания.
[0073] Функции, описанные в вышеупомянутом варианте осуществления, могут быть реализованы одной или несколькими схемами обработки. Схемы обработки включают в себя запрограммированные устройства обработки, такие как устройства обработки, включающие в себя электрические цепи. Кроме того, схемы обработки включают в себя такие устройства, как специализированная интегральная схема (ASIC) и обычные части цепей, которые выполнены с возможностью выполнять функции, описанные в варианте осуществления.
СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ
[0074] 1 – двигатель (двигатель внутреннего сгорания)
4 – электрогенератор (первый электродвигатель)
5 – аккумуляторная батарея
6 – приводной электродвигатель (второй электродвигатель)
Fa – минимальное приводное усилие
Fd – приводное усилие, которое второй электродвигатель запрошен выводить
Ft – приводной пороговый предел аккумуляторной батареи
Gj1 – первый градиент приводного усилия
Gj2 – второй градиент приводного усилия
Изобретение относится к транспортным средствам. В способе управления электроприводом транспортного средства, когда приводное усилие второго электродвигателя увеличивается в состоянии, при котором двигатель внутреннего сгорания остановлен, ограничивают приводное усилие второго электродвигателя, используя подаваемую аккумуляторной батареей электрическую мощность, более низким уровнем, чем максимальное приводное усилие, определяемое по электрической мощности, которую аккумуляторная батарея способна подавать для привода снабженного электроприводом транспортного средства. Увеличивают приводное усилие второго электродвигателя, используя подаваемую аккумуляторной батареей электрическую мощность, с течением времени в период с того момента, когда второй электродвигатель выдает ограниченное более низким уровнем приводное усилие, до того момента, когда двигатель внутреннего сгорания запускается и первый электродвигатель начинает генерацию электроэнергии. Повышается плавность ускорения. 2 н. и 11 з.п. ф-лы, 8 ил.
1. Способ управления электроприводом транспортного средства, включающего в себя:
двигатель внутреннего сгорания;
первый электродвигатель, механически соединенный с выходным валом двигателя внутреннего сгорания;
аккумуляторную батарею, электрически соединенную с первым электродвигателем; и
второй электродвигатель, механически соединенный с ведущим колесом, входящим в состав снабженного электроприводом транспортного средства, и выполненный с возможностью привода ведущего колеса с использованием электроэнергии, генерируемой первым электродвигателем, и электроэнергии, подаваемой от аккумуляторной батареи, причем способ управления электроприводом транспортного средства содержит:
когда приводное усилие, которое запрошен выдавать второй электродвигатель, увеличивается в состоянии, при котором двигатель внутреннего сгорания остановлен, ограничение приводного усилия, которое выдает второй электродвигатель, используя подаваемую аккумуляторной батареей электрическую мощность, более низким уровнем, чем максимальное приводное усилие, определяемое по электрической мощности, которую аккумуляторная батарея способна подавать для привода снабженного электроприводом транспортного средства; и
увеличение приводного усилия, которое выдает второй электродвигатель, используя подаваемую аккумуляторной батареей электрическую мощность, с течением времени в период с того момента, когда второй электродвигатель выдает ограниченное более низким уровнем приводное усилие, до того момента, когда двигатель внутреннего сгорания запускается и первый электродвигатель начинает генерацию электроэнергии.
2. Способ по п.1, в котором ограниченное более низким уровнем приводное усилие представляет собой приводной пороговый предел аккумуляторной батареи, который является значением, полученным вычитанием избыточного приводного усилия из максимального приводного усилия, где избыточное приводное усилие определяется в зависимости от времени, необходимого для запуска двигателя внутреннего сгорания.
3. Способ по п.1, в котором ограниченное более низким уровнем приводное усилие представляет собой приводной пороговый предел аккумуляторной батареи, который является значением, полученным вычитанием избыточного приводного усилия из максимального приводного усилия, где избыточное приводное усилие определяется в зависимости от времени, необходимого для запуска двигателя внутреннего сгорания, и первого градиента приводного усилия.
4. Способ по п.2 или 3, в котором, когда приводное усилие, которое запрошен выдавать второй электродвигатель, равно приводному пороговому пределу аккумуляторной батареи или превышает приводной пороговый предел аккумуляторной батареи, начинают процесс запуска двигателя внутреннего сгорания.
5. Способ по п.4, в котором, когда приводное усилие, которое запрошен выдавать второй электродвигатель, становится ниже, чем приводной пороговый предел аккумуляторной батареи, после начала процесса запуска двигателя внутреннего сгорания, приостанавливают процесс запуска двигателя внутреннего сгорания.
6. Способ по п.2 или 3, в котором, когда приводной пороговый предел аккумуляторной батареи ниже заданного минимального приводного усилия, вращают выходной вал двигателя внутреннего сгорания.
7. Способ по п.2 или 3, в котором приводной пороговый предел аккумуляторной батареи находится на стороне силовой работы и является большим, чем приводное усилие, выдаваемое вторым электродвигателем в состоянии, при котором акселератор снабженного электроприводом транспортного средства выключен.
8. Способ по п.6, в котором число оборотов при вращении выходного вала двигателя внутреннего сгорания ограничено числом оборотов, необходимым первому электродвигателю для генерации заданной минимальной электрической мощности генерации.
9. Способ по п.6, в котором первый градиент приводного усилия, выдаваемого вторым электродвигателем в период с того момента, когда второй электродвигатель выдает ограниченное более низким уровнем приводное усилие, до того момента, когда двигатель внутреннего сгорания запускается и первый электродвигатель начинает генерацию электроэнергии, устанавливают меньшим, чем второй градиент приводного усилия, выдаваемого вторым электродвигателем после начала генерации электроэнергии первым электродвигателем.
10. Способ по п.8, в котором минимальная электрическая мощность генерации определяется по приводному усилию, которое вызывает изменение ускорения на заданную или большую степень.
11. Способ по любому из пп.1-3, в котором максимальную электрическую мощность генерации, которая представляет собой максимальное значение электрической мощности, генерируемой первым электродвигателем, определяют в зависимости от электрической энергии, хранимой в аккумуляторной батарее.
12. Способ по п.2 или 3, в котором чем ниже температура наружного воздуха, тем ниже устанавливают приводной пороговый предел аккумуляторной батареи.
13. Устройство управления электроприводом транспортного средства, включающего в себя:
двигатель внутреннего сгорания;
первый электродвигатель, механически соединенный с выходным валом двигателя внутреннего сгорания;
аккумуляторную батарею, электрически соединенную с первым электродвигателем; и
второй электродвигатель, механически соединенный с ведущим колесом, входящим в состав снабженного электроприводом транспортного средства, и выполненный с возможностью привода ведущего колеса с использованием электроэнергии, генерируемой первым электродвигателем, и электроэнергии, подаваемой от аккумуляторной батареи, причем
когда приводное усилие, которое запрошен выдавать второй электродвигатель, увеличивается в состоянии, при котором двигатель внутреннего сгорания остановлен, устройство управления электроприводом транспортного средства ограничивает приводное усилие, которое выдает второй электродвигатель, используя подаваемую аккумуляторной батареей электрическую мощность, более низким уровнем, чем максимальное приводное усилие, определяемое по электрической мощности, которую способна подавать аккумуляторная батарея, и
устройство управления электроприводом транспортного средства увеличивает приводное усилие, которое выдает второй электродвигатель, используя подаваемую аккумуляторной батареей электрическую мощность, с течением времени в период с того момента, когда второй электродвигатель выдает ограниченное более низким уровнем приводное усилие, до того момента, когда двигатель внутреннего сгорания запускается и первый электродвигатель начинает генерацию электроэнергии.
| JP 2013189048 A, 26.09.2013 | |||
| JP 2010179882 A, 19.08.2010 | |||
| US 20130166122 A1, 27.06.2013 | |||
| WO 2014006717 A1, 09.01.2014 | |||
| JP 2015093663 A, 18.05.2015. |

