Изобретение относится к области авиационной техники, в частности, к органам управления полетом летательных аппаратов (ЛА).
Основными параметрами рулей, используемых для управления полетом ЛА, являются эффективность, определяемая приращением коэффициентов моментов при полном отклонении рулей от нейтрального положения, и шарнирный момент, то есть момент относительно оси вращения руля, возникающий из-за воздействия на руль воздушного потока (см. Микеладзе В.Г., Титов В.М. Основные геометрические и аэродинамические характеристики самолетов и ракет. Справочник. М., Машиностроение, 1982, с. 136 и 126). Увеличение эффективности рулей приводит к улучшению управляемости ЛА, а уменьшение шарнирного момента к уменьшению веса конструкции, мощности бустеров (приводов) рулей (бустер и бустерное управление - см. Энциклопедия Авиация. М., Большая Российская Энциклопедия, 1994, с. 124) или к непосредственному ручному управлению без использования бустеров, когда летчик, прикладывая усилие к рычагу управления, полностью компенсирует шарнирный момент отклоняемого руля (см. Энциклопедия Авиация. М., Большая Российская Энциклопедия, 1994, с. 604).
В системах управления полетом ЛА широко применяются рычажные передачи (см. Рощин Е.И., Самойлов Е.А., Алексеева Н.А. и др. Детали машин и основы конструирования. Учебник для вузов. М., Дрофа, 2006, с. 202-212), отличающиеся простотой конструкцией и более высоким коэффициентом полезного действия по сравнению с зубчатыми передачами. Управляющие поверхности ЛА, в частности рули, соединяются с другими частями конструкции ЛА при помощи узлов навески (см. Войт Е.С., Ендогур А.И. и др. Проектирование конструкций самолетов. Учебник для вузов. М., Машиностроение, 1987, с. 71).
Известен руль управления полетом ЛА, состоящий из одной подвижной поверхности, установленной в хвостовой части аэродинамической поверхности (см. Энциклопедия Авиация. М., Большая Российская Энциклопедия, 1994, с. 490). Для уменьшения шарнирного момента такого руля может использоваться осевая компенсация, представляющая собой часть руля, расположенную впереди его оси вращения вдоль всего размаха руля (см. Энциклопедия Авиация. М., Большая Российская Энциклопедия, 1994, с. 76).
Недостатком такого руля является его небольшая эффективность, определяемая приращением коэффициентов моментов при полном отклонении руля от его нейтрального положения.
Высокая эффективность особенно важна для рулей направления самолетов с двигателями, расположенными на консолях крыла в случае несимметричного отказа двигателей. В этом случае для безопасного завершения полета высокая эффективность руля направления необходима для парирования большого момента рыскания.
Известен аэродинамический руль высокой эффективности при небольших шарнирных моментах, состоящий из переднего и заднего шарнирно соединенных между собой звеньев, имеющих общую ось вращения (патент на изобретение «Аэродинамический руль» RU №2637150, МПК В64С 9/06, В64С 9/014, дата публикации 30.11.2017 г.).
Недостатками данного руля является:
1) Ограничение на соосность звеньев руля, исключающее использование кинематических связей, в частности рычажных передач, основанных на разнице в положении осей вращения звеньев руля.
2) Ограничение на соосность звеньев руля при использовании передач с зубчатыми колесами приводит к необходимости использования многоступенчатых цилиндрических зубчатых передач (см. Рощин Е.И., Самойлов Е.А., Алексеева Н.А. и др. Детали машин и основы конструирования. Учебник для вузов. М., Дрофа, 2006, с. 107-146), либо конструктивно сложных планетарных редукторов с большим числом зацеплений зубчатых колес (см. Рощин Е.И., Самойлов Е.А., Алексеева Н.А. и др. Детали машин и основы конструирования. Учебник для вузов. М., Дрофа, 2006, с. 156-166).
За прототип принят аэродинамический руль высокой эффективности, состоящий из переднего и заднего последовательно соединенных между собой звеньев с несовпадающими осями вращения, с кинематической связью для однонаправленного поворота звеньев (фиг. 7, патент на изобретение «Поверхность управления летательного аппарата» RU №2492109, МПК В64С 9/02, В64С 1/26, В64С 3/28, В64С 5/00, В64С 13/00, В82В 1/00, дата публикации 27.01.2013 г.).
Недостатком данного руля являются аэродинамические нагрузки, в том числе шарнирные моменты, большие, чем нагрузки классической одинарной шарнирной конфигурации.
Задачей и техническим результатом предлагаемого изобретения является разработка аэродинамического руля высокой эффективности при небольшой мощности привода руля или при ручном безбустерном управлении, с возможностью использования кинематических связей, основанных на разнице в положении осей вращения звеньев руля.
Решение задачи и технический результат достигаются тем, что аэродинамический руль, состоящий из переднего и заднего звеньев с несовпадающими осями вращения, с осью вращения одного из звеньев, расположенной на другом звене и с кинематической связью для однонаправленного поворота звеньев, выполнен с задним звеном с осевой компенсацией, с профилированной щелью между передним и задним звеньями руля, с осью вращения переднего звена, расположенной позади указанной щели. При этом в различных вариантах руля ось вращения одного из звеньев руля (заднего, либо переднего) расположена на аэродинамической поверхности ЛА, и на указанном звене расположена ось вращения другого звена руля.
Изобретение поясняется следующими фигурами.
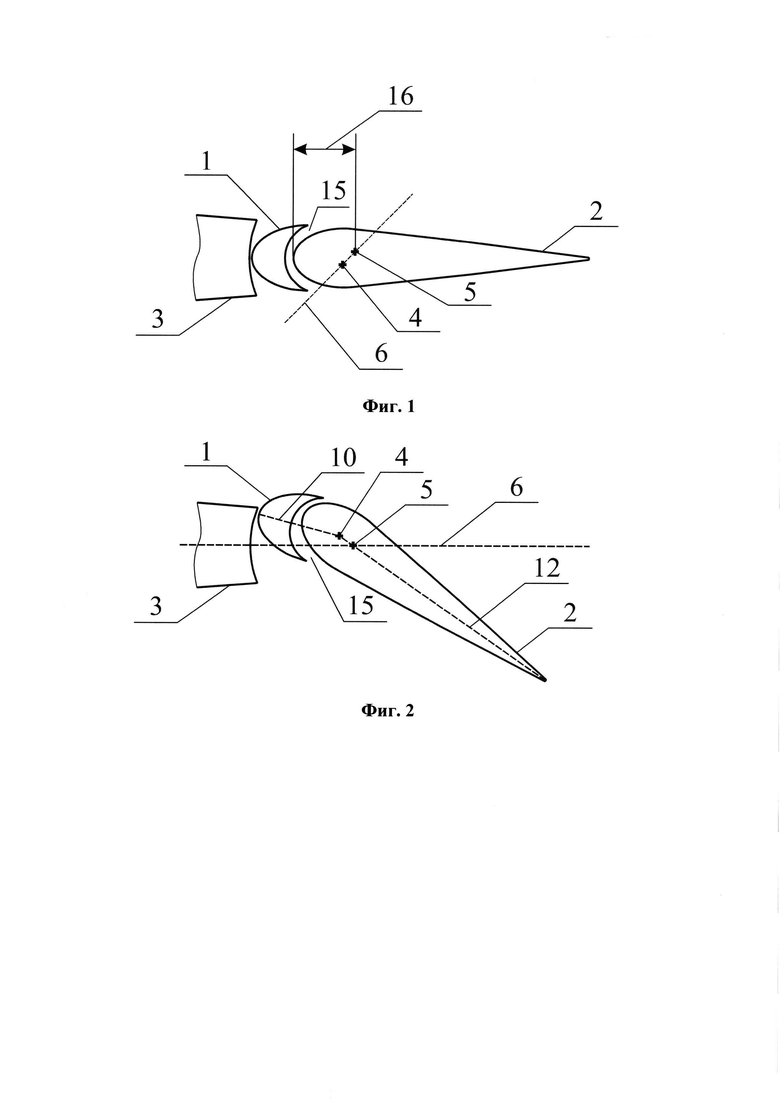
На фигуре 1 изображен профиль сечения руля в нейтральном (неотклоненном) положении.
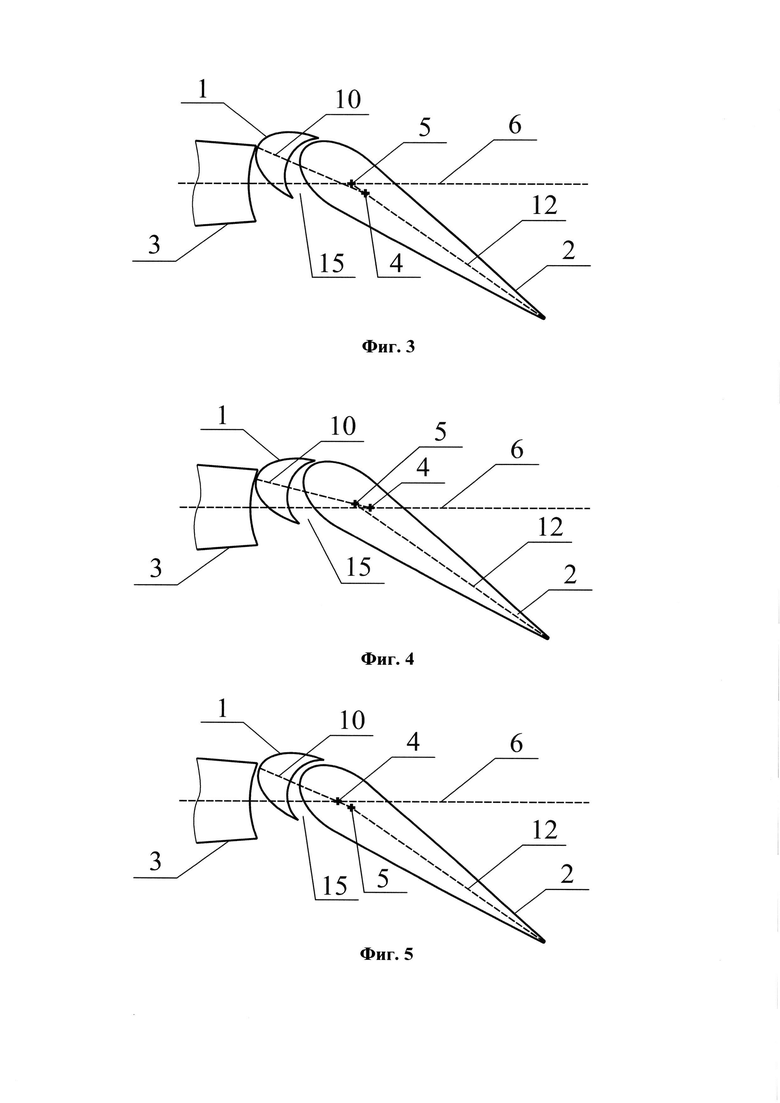
На фигурах 2 и 3 изображен профиль сечения руля в отклоненном положении в варианте, когда ось вращения заднего звена руля расположена на аэродинамической поверхности ЛА, и ось вращения переднего звена расположена на заднем звене перед осью его вращения или соответственно за осью его вращения.
На фигурах 4 и 5 изображен профиль сечения руля в отклоненном положении в варианте, когда ось вращения переднего звена руля расположена на аэродинамической поверхности ЛА, и ось вращения заднего звена расположена на переднем звене перед осью его вращения или соответственно за осью его вращения.
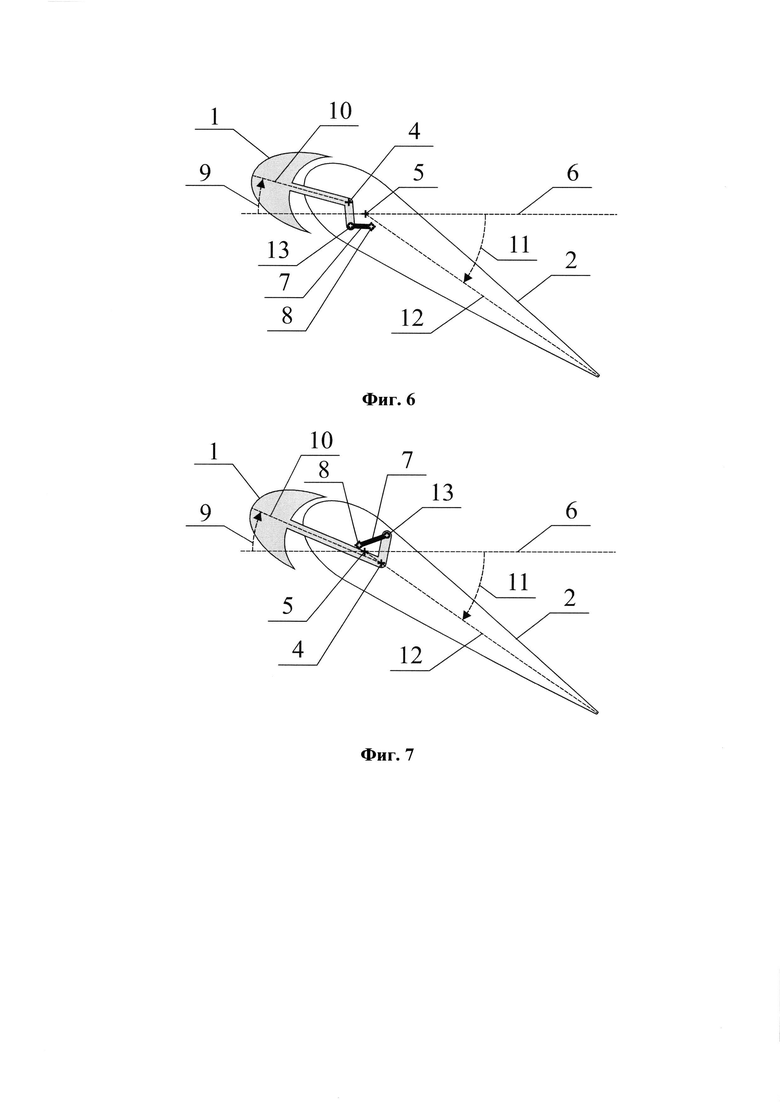
На фигурах 6 и 7 схематически показаны возможные кинематические связи перемещений звеньев предлагаемого руля на основе рычажных передач в вариантах, когда ось вращения заднего звена руля расположена на аэродинамической поверхности ЛА, и ось вращения переднего звена расположена на заднем звене перед осью его вращения или соответственно за осью его вращения.
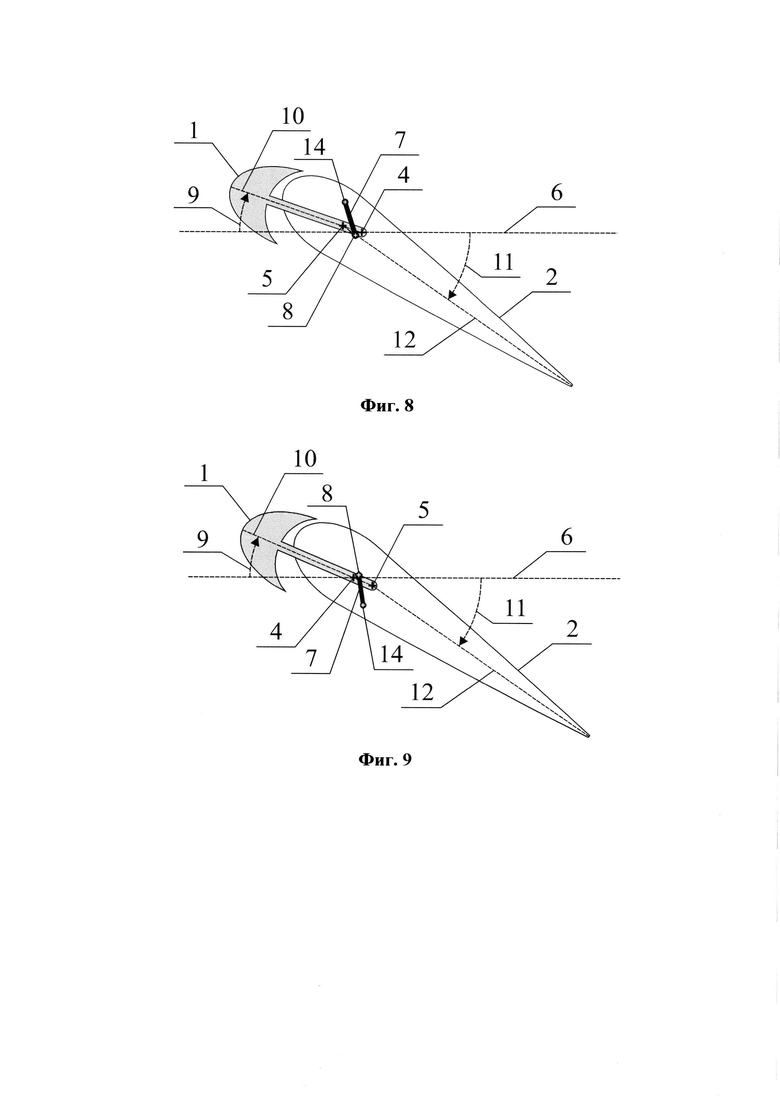
На фигурах 8 и 9 схематически показаны возможные кинематические связи перемещений звеньев предлагаемого руля на основе рычажных передач в вариантах, когда ось вращения переднего звена руля расположена на аэродинамической поверхности ЛА, и ось вращения заднего звена расположена на переднем звене перед осью его вращения или соответственно за осью его вращения.
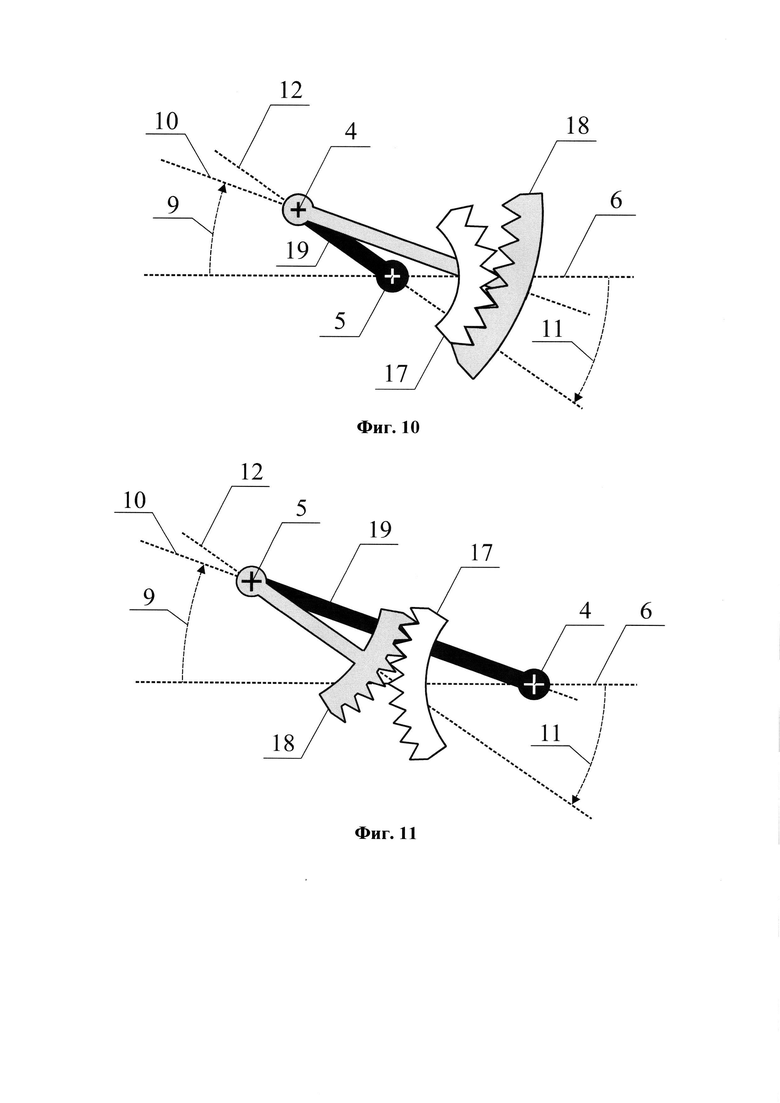
На фиг. 10 схематически показана планетарная передача с одним зацеплением центрального колеса с сателлитным колесом, отклоняющим переднее звено руля в варианте, когда ось вращения заднего звена руля расположена на аэродинамической поверхности или иной части летательного аппарата, и ось вращения переднего звена расположена на заднем звене.
На фиг. 11 схематически показана планетарная передача с одним зацеплением центрального колеса с сателлитным колесом, отклоняющим заднее звено руля в варианте, когда ось вращения переднего звена руля расположена на аэродинамической поверхности или иной части летательного аппарата, и ось вращения заднего звена расположена на переднем звене.
Перечень позиций и обозначений к изобретению «Руль поверхности летательного аппарата»:
1 - переднее звено
2 - заднее звено
3 - аэродинамическая поверхность
4 - ось вращения переднего звена
5 - ось вращения заднего звена
6 - нейтральное положение руля
7 - тяга
8 - шарнир на опоре
9 - перемещение переднего звена из нейтрального положения в отклоненное положение
10 - отклоненное положение переднего звена
11 - перемещение заднего звена из нейтрального положения в отклоненное положение
12 - отклоненное положение заднего звена
13 - шарнир на переднем звене
14 - шарнир на заднем звене
15 - профилированная щель
16 - осевая компенсация
17 - центральное колесо
18 - сателлитное колесо
19 - водило
Руль, установленный на аэродинамической поверхности летательного аппарата, состоит из следующих основных элементов - переднего и заднего звеньев с несовпадающими осями вращения, причем ось вращения одного звена расположена на другом звене, и с кинематической связью для однонаправленного поворота звеньев.
Звенья руля и соединены между собой, с тягой, с аэродинамической поверхностью летательного аппарата посредством узлов навески (на фигурах не показано).
На фигурах 1-5 изображен руль, установленный на аэродинамической поверхности 3 ЛА, состоящий из переднего звена 1 и заднего звена 2, при этом переднее звено 1 руля имеет ось вращения 4, а заднее звено 2 руля имеет ось вращения 5, переднее звено 1 отделено от заднего звена 2 профилированной щелью 15. На фиг. 1 показана осевая компенсация 16 заднего звена 2.
Через ось вращения 4 переднего звена и ось вращения 5 заднего звена в нейтральном положении на фиг. 1 проходит линия нейтральных положений 6.
Линия нейтральных положений 6 в отклоненном положении руля на фиг. 2-11 проходит через ось вращения переднего звена руля 4 или ось вращения заднего звена руля 5.
На фигурах 2-11 при отклонении переднего звена 1 и заднего звена 2, переднее звено 1 переходит из нейтрального положения руля 6 в отклоненное положение переднего звена 10, а заднее звено руля 2 - переходит из нейтрального положения руля 6 в отклоненное положение заднего звена 12.
На фигурах 6-9 изображены примеры кинематических связей перемещения 9 переднего звена 1 и перемещения 11 заднего звена 2 в виде рычажных передач, которые включают тягу 7, соединяющую или переднее звено руля 1 (фиг. 6, 7) или заднее звено руля 2 (фиг. 8, 9) с шарниром на опоре 8, расположенной на аэродинамической поверхности ЛА 3.
На фигурах 2-3, когда ось вращения 5 заднего звена 2 расположена на аэродинамической поверхности ЛА 3, при отклонении заднего звена 2 относительно оси вращения 5 ось вращения 4 переднего звена 1 перемещается вместе с задним звеном 2, и, при этом, переднее звено 1 отклоняется относительно своей оси 4.
На фигурах 4-5, когда ось вращения 4 переднего звена 1 расположена на аэродинамической поверхности ЛА 3, при отклонении переднего звена 1 относительно оси вращения 4 ось вращения 5 заднего звена 2 перемещается вместе с передним звеном 1, и, при этом, заднее звено 2 отклоняется относительно своей оси 5.
Между перемещением 9 переднего звена 1 из нейтрального положения 6 в положение 10 и перемещением 11 заднего звена 2 из нейтрального положения 6 в положение 12 могут вводиться кинематические связи, примеры которых в виде рычажных передач схематически показаны на фиг. 6-9. Тяга 7 связывает перемещения звеньев руля, соединена шарниром 13 переднее звено 1 (фиг. 6 и 7) или шарниром 14 заднее звено 2 (фиг. 8 и 9) с шарниром на опоре 8 на аэродинамической поверхности ЛА 3.
При использовании планетарных передач с одним зацеплением (фиг. 10 и 11) перемещение 9 переднего звена из нейтрального положения 6 в отклоненное положение 10 связано с перемещением 11 заднего звена из нейтрального положения 6 в отклоненное положение 12 посредством центрального зубчатого колеса 17 с внешним зацеплением, зафиксированного на аэродинамической поверхности ЛА, сателлитного зубчатого колеса 18 и водила 19.
В вариантах, когда ось вращения заднего звена руля 5 расположена на аэродинамической поверхности ЛА и ось вращения переднего звена 4 расположена на заднем звене (фиг. 10), центр центрального колеса 17 находится на оси вращения 5 заднего звена руля, центр сателлитного колеса 18 находится на оси вращения 4 переднего звена руля, при этом сателлитное колесо 18 имеет внутреннее зацепление и неподвижно соединено с передним звеном руля, а водило 19 неподвижно соединено с задним звеном руля.
В вариантах, когда ось вращения переднего звена руля 4 расположена на аэродинамической поверхности ЛА и ось вращения заднего звена 5 расположена на переднем звене (фиг. 11), центр центрального колеса 17 находится на оси вращения 4 переднего звена руля, центр сателлитного колеса 18 находится на оси вращения 5 заднего звена руля, при этом сателлитное колесо 18 имеет внешнее зацепление и неподвижно соединено с задним звеном руля, а водило 19 неподвижно соединено с передним звеном руля.
Работу руля с точки зрения кинематических связей можно охарактеризовать следующим образом - под воздействием на руль воздушного потока аэродинамические нагрузки на заднем звене действуют в направлении, переводящем заднее звено руля в нейтральное положение. Таким образом, для отклонения руля из нейтрального положения требуются усилия на приводе руля. Однако, на переднем звене руля аэродинамические нагрузки наоборот стремятся отклонить переднее звено руля от нейтрального положения. Рассмотренные кинематические связи приводят к компенсации аэродинамических нагрузок на звеньях руля. В результате этот уменьшается усилие на приводе руля.
Таким образом, наряду с кинематической связью в виде тяги, соединяющей одно из звеньев руля с опорой на аэродинамической поверхностью ЛА, возможно использование планетарной передачи, в которой достаточно ограничиться одним зацеплением неподвижного центрального зубчатого колеса с сателлитным колесом, отклоняющим одно из звеньев руля.
Рассмотренные варианты кинематических связей согласно расчетам, способствуют уменьшению шарнирного момента на оснащенном приводом основном звене руля в несколько раз, по сравнению с шарнирным моментом, подсчитанным отдельно для основного звена без учета кинематических связей с другим звеном руля, тогда как для прототипа кинематическая связь звеньев руля приводит к росту шарнирного момента на приводе основного звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Руль аэродинамической поверхности летательного аппарата | 2020 |
|
RU2746534C1 |
| АЭРОДИНАМИЧЕСКИЙ РУЛЬ | 2016 |
|
RU2637150C1 |
| Аэродинамический руль | 2022 |
|
RU2789424C1 |
| АЭРОДИНАМИЧЕСКИЙ ОРГАН УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2792369C1 |
| ОРГАН УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2672153C1 |
| АЭРОДИНАМИЧЕСКИЙ РУЛЬ | 2015 |
|
RU2593178C1 |
| Способ изменения характеристик органа аэродинамического управления беспилотного летательного аппарата | 2022 |
|
RU2819376C1 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2646691C2 |
| АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2013 |
|
RU2534112C1 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2645522C1 |
Изобретение относится к органам управления полетом летательного аппарата. Аэродинамический руль состоит из переднего и заднего звеньев, одно из которых опирается при своем вращении на другое, с задним звеном, выполненным с осевой компенсацией, с профилированной щелью между звеньями руля. Изобретение направлено на повышение эффективности руля при небольшой мощности привода руля или при безбустерном управлении с возможностью использования кинематических связей между отклонениями звеньев руля. 6 з.п. ф-лы, 11 ил.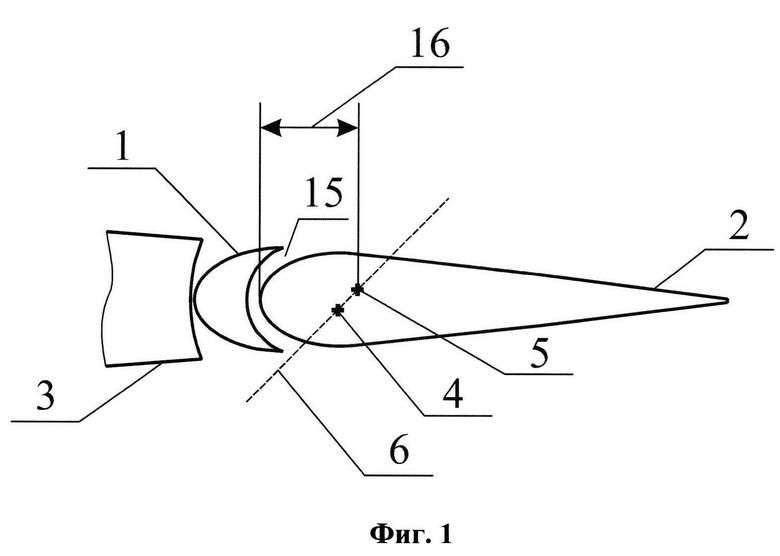
1. Руль аэродинамической поверхности летательного аппарата, состоящий из переднего и заднего звеньев с несовпадающими осями вращения, с осью вращения одного из звеньев, расположенной на другом звене, и с кинематической связью для однонаправленного поворота звеньев, отличающийся тем, что заднее звено выполнено с осевой компенсацией, между передним и задним звеньями руля выполнена профилированная щель, при этом ось вращения переднего звена расположена позади указанной щели.
2. Руль по п. 1, отличающийся тем, что ось вращения заднего звена руля расположена на аэродинамической поверхности летательного аппарата, а ось вращения переднего звена расположена на заднем звене.
3. Руль по п. 2, отличающийся тем, что кинематическая связь между звеньями руля выполнена в виде тяги, соединяющей переднее звено руля с опорой на аэродинамической поверхности летательного аппарата.
4. Руль по п. 2, отличающийся тем, что кинематическая связь между звеньями руля выполнена в виде планетарной передачи, состоящей из закрепленного на аэродинамической поверхности летательного аппарата центрального зубчатого колеса с внешним зацеплением, закрепленного на заднем звене руля водила, закрепленного на переднем звене руля сателлитного зубчатого колеса с внутренним зацеплением.
5. Руль по п. 1, отличающийся тем, что ось вращения переднего звена руля расположена на аэродинамической поверхности летательного аппарата, а ось вращения заднего звена расположена на переднем звене.
6. Руль по п. 5, отличающийся тем, что кинематическая связь между звеньями руля выполнена в виде тяги, соединяющей заднее звено руля с опорой на аэродинамической поверхности летательного аппарата.
7. Руль по п. 5, отличающийся тем, что кинематическая связь между звеньями руля выполнена в виде планетарной передачи, состоящей из закрепленного на аэродинамической поверхности летательного аппарата центрального зубчатого колеса с внешним зацеплением, закрепленного на переднем звене руля водила, закрепленного на заднем звене руля сателлитного зубчатого колеса с внешним зацеплением.
| ПОВЕРХНОСТЬ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2492109C2 |
| АЭРОДИНАМИЧЕСКИЙ РУЛЬ | 2016 |
|
RU2637150C1 |
| CN 205059998 U, 02.03.2016. | |||

