Изобретение касается авиационной техники, а именно систем управления в продольном канале используемых на самолетах, экранопланах и планерах преимущественно нормальной аэродинамической схемы.
Из уровня техники известен классический способ управления летательным аппаратом в продольном канале, заключающийся в одновременном управлении углом наклона траектории и углом атаки путем изменения угла тангажа при помощи отклоняемой аэродинамической поверхности, функционально связанной с органом управления. В частности, роль такой поверхности может выполнять руль высоты классического типа, навешенный на задней кромке горизонтального оперения, расположенного позади аэродинамического фокуса летательного аппарата и кинематически связанный с органом управления в кабине летчика таким образом, что отклонение ручки управления «на себя» отклоняет руль высоты на кабрирование и наоборот.
Основным недостатком классического руля высоты и способа управления в продольном канале является то, что, непосредственно задавая при помощи руля высоты один угол - угол тангажа, пилот должен одновременно контролировать две угловые величины - угол наклона траектории и угол атаки. С точки зрения управления пространственным положением подвижного объекта, эту задачу можно сравнить с управляемым заносом автомобиля, происходящим в вертикальной, а не в горизонтальной плоскости, поскольку при движении автомобиля в управляемом заносе угол поворота управляемых колес отвечает как за радиус поворота, так и за поддержание угла заноса. При этом превышение предельного угла заноса автоматически означает потерю управления и неконтролируемое вращение автомобиля, а утрата контроля за радиусом поворота означает выезд за пределы дороги, чреватый возможным столкновением с препятствием.
В рамках той же логики, в случае с самолетом или планером, неспособность летчика к одновременному контролю обоих угловых величин приводит или к потере управления при превышении допустимого угла атаки, или к неспособности уйти от столкновения с землей или иными препятствиями при невозможности изменения наклона траектории.
Возможно, что подобная ситуация объясняется тем, что руль высоты в его современном виде впервые появился на летательных аппаратах со статическим принципом создания подъемной силы - дирижаблях, где он назывался, как и на подводных лодках, рулем глубины. При этом задачей пилота управляемого аэростата при управлении в продольном канале является контроль одного угла - угла наклона траектории, поскольку угол атаки для управляемого аэростата имеет ровно такое же второстепенного значение, как и угол скольжения, будучи лишь величиной скольжения в вертикальной плоскости.
Известен также альтернативный способ управления летательным аппаратом в продольном канале, заключающийся в непосредственном управлении углом наклона траектории через изменение угла атаки крыла при помощи поворота относительно поперечной оси вращения. Главным преимуществом данного способа управления является отсутствие инерции из-за вращения всего планера вокруг поперечной оси, неизбежно возникающего при классическом способе управления с использованием горизонтального оперения.
Недостатком данного способа управления является возможность выхода ЛА на закритические углы атаки из-за недостаточно эффективной стабилизации фюзеляжа по направлению набегающего потока, когда угол атаки фюзеляжа суммируется с заданным максимальным углом атаки крыла.
Данный способ управления ЛА в продольном канале реализован, в частности, в «Самолете», описание которого приводится в патенте США №3415469 от 10.12.1968. Данный патент описывает конструкцию летающей лодки Spratt, названной так по имени своего изобретателя Джорджа Спратта. Наиболее характерной особенностью данной конструкции является непосредственное и раздельное управление углом атаки левого и правого полукрыльев, осуществляемое при помощи штурвала катерного типа, отвечающего за поперечный канал управления и фиксируемой в определенном положении рукоятки управления подъемной силой, которая по логике своей работы близка рукоятке управления коллективным шагом вертолета и отвечает за продольный канал управления.
Достоинством цельноповоротных крыльев является возможность быстрого восстановления пилотом нормального обтекания крыла в случае срыва потока за счет уменьшения угла атаки, а также способность к автоматическому уменьшению или увеличению угла атаки при полете в условиях турбулентности, а недостатком - сложность постройки летательного аппарата на таком принципе управления в категории тяжелее ультралегкой, поскольку большие моменты инерции полукрыльев и значительные градиенты балансировочных усилий на органе управления в продольном канале сильно затрудняют управление полетом.
Кроме того, поскольку каждое из полукрыльев летающей лодки Spratt относительно фюзеляжа подвешено на поперечной оси, профиль крыла должен обладать свойствами самобалансирования по тангажу, а самобалансирующиеся профили, такие как использованный Джорджем Спраттом NACA 23112, концептуально обладают пониженным коэффициентом подъемной силы, что ограничивает топливную эффективность летательных аппаратов с управляемым цельноповоротным крылом.
Известен также планер летательного аппарата, описание которого приводится в патенте РФ №2410286 от 27.01.2011, который по своему техническому решению наиболее близок к предложенному изобретению. Данный планер содержит по меньшей мере одно крыло и систему управления в продольном канале, включающую в себя орган управления, а также шарнирно установленные на планере опорный руль высоты и задающий руль высоты, при этом опорный руль высоты в полете ориентирован по направлению набегающего потока, орган управления установлен с возможностью изменения взаимного расположения опорного руля высоты и задающего руля высоты, а задающее звено выполнено в виде органа управления и установлено на планере летательного аппарата, а орган управления установлен на планере так, что его положение коррелирует с положением опорного руля высоты при нулевом моменте тангажа, действующем на планер летательного аппарата.
Основным недостатком известного планера летательного аппарата является концептуально худшая продольная устойчивость аэродинамической схемы «утка», в данном варианте усугубляемая недостаточной структурной целостностью конструкции из-за расположения перед аэродинамическим фокусом флюгированных элементов. В результате частота и амплитуда колебаний элементов конструкции относительно друг друга зависит от скорости полета и при этом вышеупомянутые колебания могут непредсказуемым образом сочетаться с атмосферными возмущениями и управляющими воздействиями пилота, что может привести к потере управления в полете.
Известен также ограничитель предельных режимов полета (ОПР), входящий с состав системы управления истребителя Су-27, описание которой приводится в книге Андрея Фомина «Су-27. История истребителя», М., 2004, на стр. 285. Ограничитель предельных режимов полета содержит вычислитель, использующий сигналы датчиков угла атаки и вертикальной перегрузки, а также сервопривод с подпружиненным штоком, ограничивающим перемещение ручки управления «на себя» при выходе самолета на предельные углы атаки и величины перегрузок. ОПР позволяет пилоту сосредоточиться непосредственно на решении боевой задачи, не отвлекаясь на проблему выбора максимально допустимой величины отклонения органа управления в продольном канале при энергичном маневрировании.
Недостатком ОПР является мнимое ощущение наличия запаса по несущей способности планера, возникающее у пилота имеющего опыт управления статически устойчивыми ЛА при скачкообразном увеличении усилия на ручке управления, что требует прохождения пилотом специальной программы подготовки.
Известен также «датчик угла атаки», описание которого приводится в патенте США №54388865 от 08.08.1995, данный датчик представляет собой флюгированную аэродинамическую поверхность (флюгер), шарнирно установленный на основании и снабженный считывающим устройством, а также пружинно-кулачковым механизмом возврата в исходное положение.
Сигнал от датчика угла атаки может использоваться как системой управления самолета, так и выводится на стрелочный индикатор, установленный в поле зрения пилота. В последнее время, учитывая важность информации о текущем угле атаки для пилотов легких и сверхлегких самолетов, склонных к быстрой потере скорости при маневрировании и наборе высоты, конструкторы некоторых из них при компоновке приборной панели стали отдавать приоритет указателю угла атаки, устанавливая его над всеми другими приборами самолета. Подобное техническое решение, применено, в частности, на самолете-амфибии ICON А5, где оно является составной частью концепции «штопороустойчивого» самолета. Видеопрезентация данного технического решения размещена в сети Интернет по адресу https://www.youtube.com/watch?v=2wlvpJLcf-A&t=231s.
Основным недостатком приборных указателей угла атаки является вероятность несвоевременного считывания его показаний пилотом, а также неверная или запоздалая интерпретация этих показаний, поскольку в процессе сваливания угол атаки нарастает нелинейно. Так, для легкомоторного самолета массой около 600 кг при приближении к скорости сваливания с постоянным темпом потери скорости в течение 10-15 секунд, продолжительность фазы активного приращения значения угла атаки составляет не более 2-3 секунд в горизонтальном полете и перегрузке около 1 G и менее двух секунд при наличии значительного угла крена и перегрузки 1,6-2 G, чего может не хватить для своевременного реагирования пилота на предупреждение.
При разработке предложенной конструкции планера летательного аппарата ставилась основная задача существенного снижения вероятности непреднамеренного вывода ЛА на закритические углы атаки, в том числе при выполнении перевернутого полета за счет изменения принципа работы системы управления в продольном канале.
Второй задачей было предоставление пилоту информации о выходе на субкритические углы атаки в наиболее доступном и очевидном для него виде - через изменение величины шарнирного момента и руля высоты и нейтрального положения органа управления, используемого для управления в продольном канале.
Третьей задачей был поиск возможности конструктивной реализации предложенного способа управления летательным аппаратом в продольном канале в легкой и сверхлегкой авиации с учетом свойственных ей весовых, конструктивных и экономических ограничений за счет возможности предложенного принципа управления в рамках чисто механического устройства.
Цель изобретения - повышение безопасности эксплуатации летательных аппаратов и упрощение процесса пилотирования.
Для достижения поставленной цели в известную конструкцию планера летательного аппарата, содержащую по меньшей мере одно крыло и систему управления в продольном канале, включающую в себя орган управления, а также шарнирно установленные на планере опорный руль высоты и задающий руль высоты, при этом опорный руль высоты в полете ориентирован по направлению набегающего потока, орган управления установлен с возможностью изменения взаимного расположения опорного руля высоты и задающего руля высоты, задающее звено выполнено в виде органа управления и установлено на планере летательного аппарата, а орган управления установлен на планере так, что его положение коррелирует с положением опорного руля высоты при нулевом моменте тангажа, действующем на планер летательного аппарата, были включены следующие конструктивные признаки: предложенный планер летательного аппарата содержит делитель и кинематические связи, орган управления, при этом опорный руль высоты и задающий руль высоты связаны между собой посредством кинематических связей, шарнирный момент опорного руля высоты при равной величине скоростного напора в два и более раза выше шарнирного момента задающего руля высоты, а конструктивное исполнение делителя обеспечивает отклонение в противофазе опорного и задающего рулей высоты при неподвижном органе управления и отклонение опорного и задающего рулей высоты в фазе при отклонении органа управления от нейтрального положения.
Кроме того, предложенный планер летательного аппарата содержит горизонтальное оперение, расположенное позади аэродинамического фокуса крыла, система управления в продольном канале содержит регулируемые упоры, установленные на планере с возможностью ограничения расхода органа управления, опорный руль высоты выполнен в виде штанги с аэродинамической поверхностью на свободном конце, шарнирно установленной в задней части планера, при этом аэродинамическая поверхность штанги расположена позади задающего руля высоты, задающий руль высоты шарнирно установлен на задней кромке горизонтального оперения и скомпенсирован по массе относительно собственной оси вращения, а система, состоящая из штанги с аэродинамической поверхностью, делителя и кинематических связей, скомпенсирована по массе относительно оси вращения штанги.
Благодаря введенным конструктивным изменениям повышается безопасность полетов при обеспечении высокого уровня топливной эффективности и простоты процесса пилотирования летательного аппарата за счет резкого снижения вероятности непреднамеренного вывода летательного аппарата на закритические углы атаки и предоставления пилоту информации о текущем угле атаки в наиболее доступном и очевидном для него виде - через изменение нейтрального положения органа управления, используемого для управления в продольном канале.
Устройство согласно изобретению иллюстрируется чертежами, на которых обозначено:
на фиг. 1 - общий вид летательного аппарата;
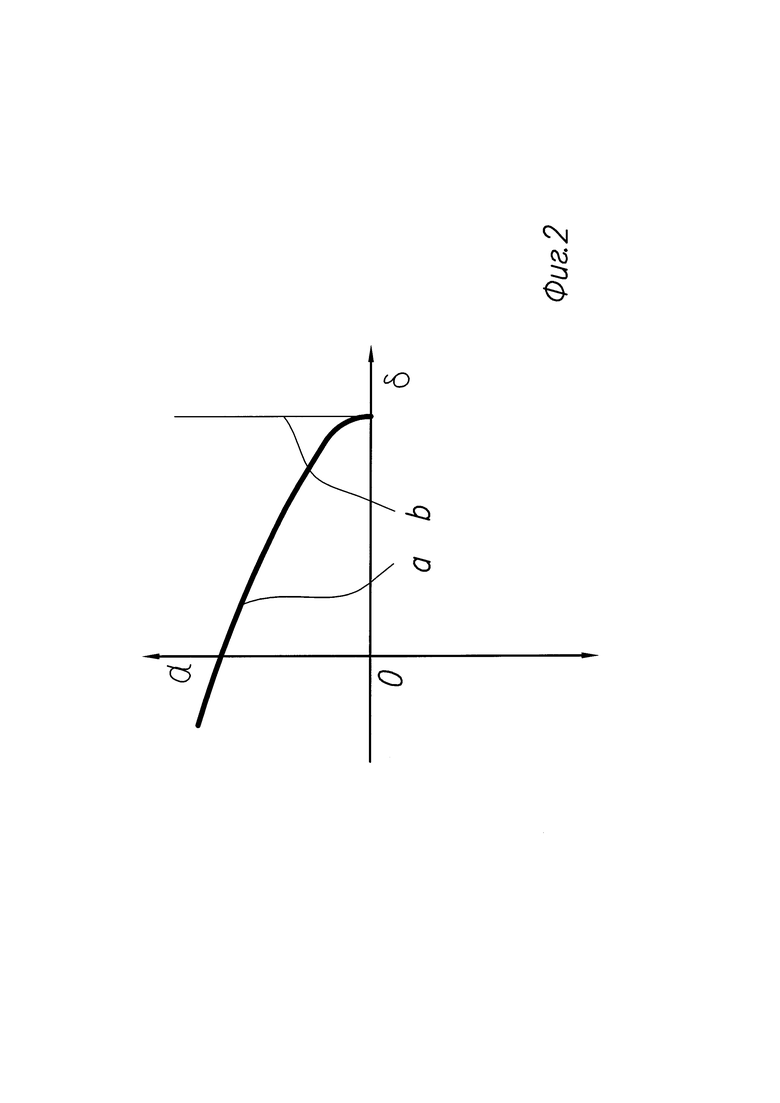
на фиг. 2 - зависимость угла отклонения задающей аэродинамической поверхности от угла атаки при максимально возможном отклонении органа управления;
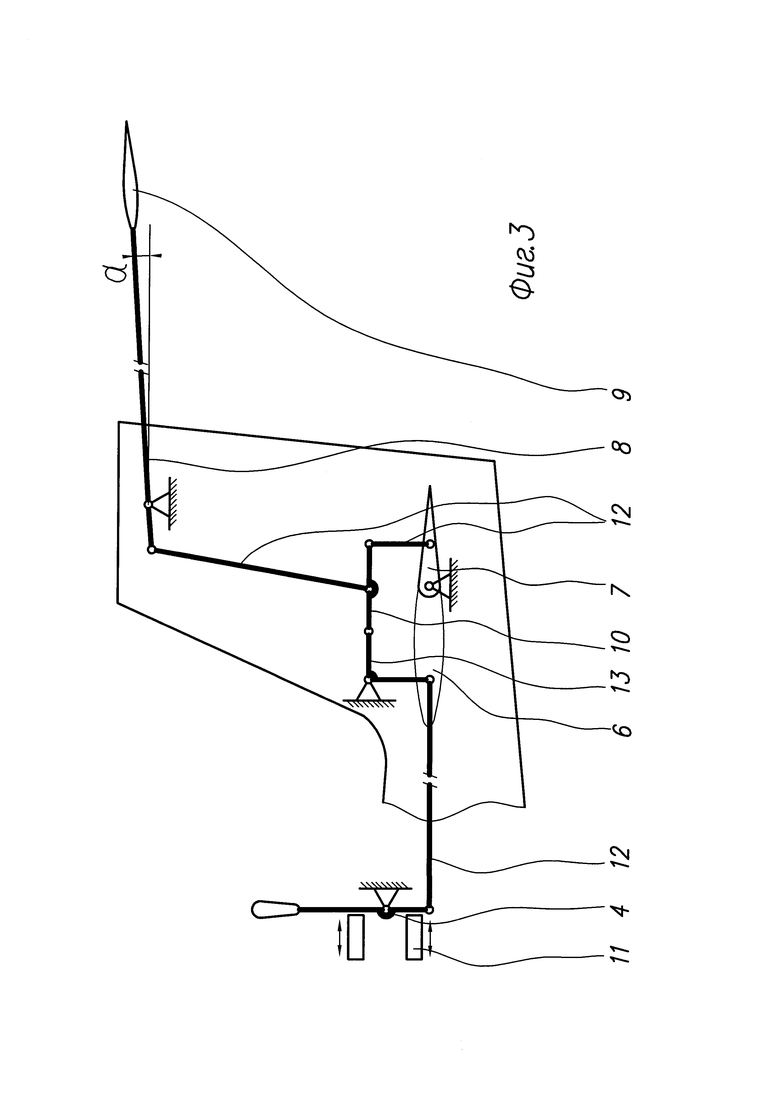
на фиг. 3 - кинематическая схема нейтрального положения системы управления при близком к оптимальному угле атаки;
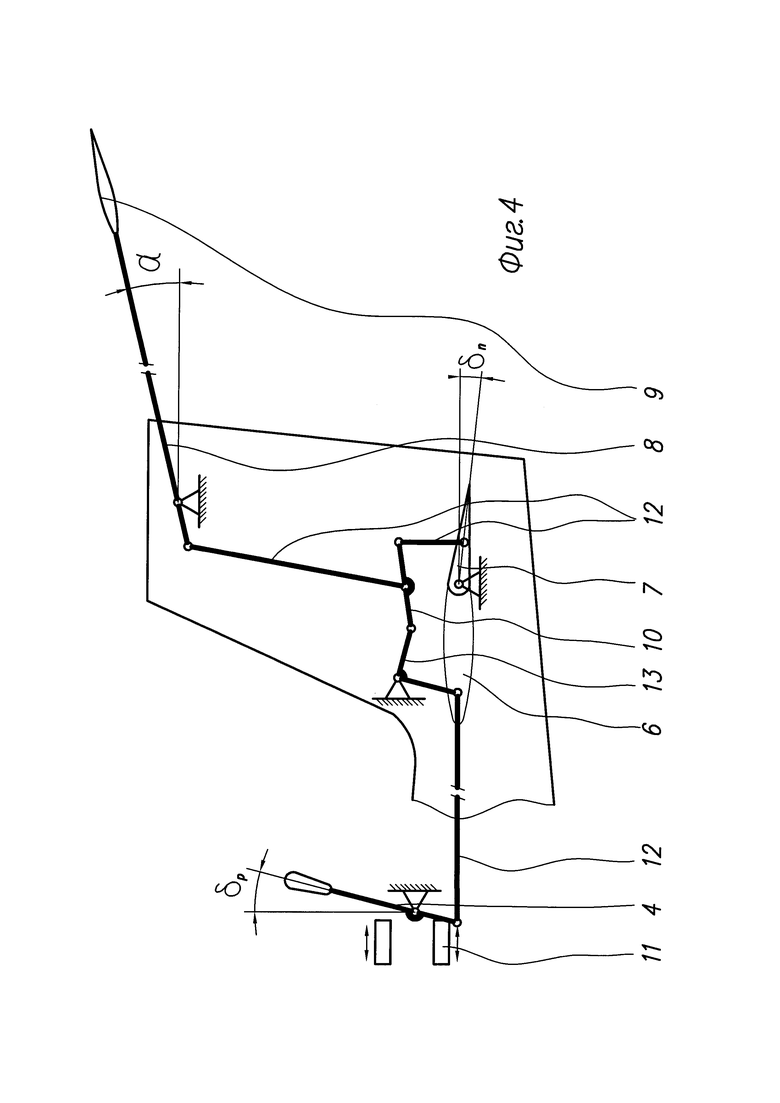
на фиг. 4 - кинематическая схема системы управления в состоянии инверсии задающего руля высоты при недопустимо высоком угле атаки.
Планер летательного аппарата согласно изобретению содержит несущее основание, выполненное в виде фюзеляжа (1), силовую установку (2), кабину пилота (3) с органом управления (4), крыло (5), стабилизатор (6) с рулем высоты (7), штангу (8) с аэродинамической поверхностью (9), делитель (10), регулируемые упоры (11), кинематические связи, включающие в себя тяги (12) и качалку (13), а на руле высоты (7) установлены весовые компенсаторы (14). При этом силовая установка (2), крыло (5), орган управления (4), стабилизатор (6), штанга (8) и делитель (10) установлены на фюзеляже (1), Орган управления (4) установлен с возможностью отклонений от среднего положения, при этом предельные величины отклонений ограничиваются регулируемыми упорами (11) и кинематически связан с делителем (10) при помощи тяги (12) и качалки (13), а штанга (8) и руль высоты (7) кинематически связаны с делителем при помощи тяг (12).
Планер летательного аппарата согласно изобретению работает следующим образом (работа устройства рассмотрена на примере самолета, как наиболее распространенного варианта летательного аппарата с фиксированным крылом).
При взлете после разбега до необходимой скорости пилот отклоняет орган управления (4) на себя. При этом управляющее усилие с органа управления (4) поступает на делитель (10) через тягу (12) и качалку (13), при этом делитель (10) поворачивается против часовой стрелки, вызывая сонаправленное отклонение штанги (8) и руля высоты (7) на кабрирование на углы, определяемые соотношением шарнирных моментов руля высоты (7) и штанги (8) и соотношением плеч делителя (10). Это вызывает подъем носовой части самолета и увеличение угла атаки, что в свою очередь приводит к увеличению отклонения штанги (8) на кабрирование, опусканию средней части делителя (10) и уменьшению отклонения на кабрирование руля высоты (7), то есть фактически к стабилизации ЛА на заданном пилотом значении угла атаки при неподвижном органе управления (4). После взлета для недопущения потери ускорения самолета, пилот постепенно отдает орган управления (4) от себя, компенсируя тенденцию самолета к увеличению угла наклона траектории с ростом скорости полета при сохранении взлетного угла атаки.
В горизонтальном полете и при штатном маневрировании пилотирование самолета согласно изобретению принципиально не отличается от классической системы управления, так как для изменения угла наклона траектории пилоту требуются точно такие же действия, как на стандартной системе управления. Положение элементов системы управления при полете на крейсерской скорости показано на фиг. 3.
Отличия в поведении самолета с предложенной системой управления от классической возникают, если пилот будет пытаться удерживать самолет в горизонтальном полете при недостатке мощности силовой установки (2). В этом случае пилот ощущает плавное, но с ускорением «сползание» органа управления (4) назад, так как возможная величина отклонения руля высоты (7) на кабрирование обратно пропорциональна степени отклонения штанги (8) вверх и, соответственно, степени опускания средней части делителя (10) вниз. По этой причине по мере роста угла атаки в процессе реакции ЛА на управляющий импульс шарнирный момент руля высоты начинает падать, создавая на органе управления (4) крайне информативный эффект «сваливания с ручки». В норме пилот, ощутив уход органа (4) управления на себя от нормального положения, тут же интуитивно отдает орган управления (4) от себя и несколько увеличивает мощность силовой установки (2) для восстановления нормального полета.
Если же при потере скорости пилот не реагирует должным образом и орган управления (4) из-за роста угла атаки доходит до регулируемого упора (11), то дальнейший подъем заднего конца штанги (8) вызывает отклонение руля высоты (7) на пикирование от нейтрального положения, то есть делитель (10) в экстремальной ситуации автоматически инвертирует руль высоты (7), что исключает переход самолета в режим сваливания в рамках разумных ограничений по углам тангажа и минимальной допустимой скорости. Положение элементов системы управления при такой ситуации показано на фиг. 4, а на фиг. 2 изображен примерный график зависимости угла отклонения руля высоты (7) от угла атаки при полностью отклоненном до упора на себя органе управления (4), где линия а - это кривая угла отклонения руля высоты, а линия b - положение ручки управления (Случай, когда пилот вводит самолет в крутой набор высоты и сознательно убирает тягу, продолжая, тем не менее, тянуть орган управления (4) на себя в число штатных не входит). Далее самолет с удерживаемым в крайнем заднем положении органом управления (4) опускает нос и переходит в управляемое снижение на углах атаки, близких к максимально возможным по условию сохранения продольной устойчивости и поперечной управляемости.
Важно отметить, что в режиме инверсии руля высоты (7) самолет может находиться как в режиме контролируемого сваливания, когда нормальное обтекание крыла (5) уже частично нарушено, так и в режиме планирования на большом угле атаки, что зависит от конструктивных особенностей конкретного самолета.
Кроме того, описанная выше система управления может точно также страховать самолет от сваливания в перевернутом полете, при этом регулируемые упоры (11) можно настраивать на различные критические углы атаки в прямом и перевернутом полете.
Важно то, что момент начала инверсии руля высоты (7) при превышении допустимого угла атаки не зависит от величины скоростного напора, так что описанное выше безопасное поведение самолета возможно не только при критической потере скорости, но также в случаях вывода из пикирования или излишне энергичного маневрирования в горизонтальной плоскости.
На посадке пилот самолета с предложенной системой управления имеет преимущество из-за большей стабильности поведения машины вследствие полуавтоматического поддержания угла атаки. В целом расчет на посадку выполняется традиционно, но при необходимости появляется возможность выполнить снижение и выравнивание на скорости, несколько меньшей нормальной, отклонив орган управления (4) на себя и удерживая его в таком положении, не рискуя при этом превысить заданное значение угла атаки.
Таким образом, благодаря введенным конструктивным изменениям повышается безопасность полетов при обеспечении высокого уровня топливной эффективности и простоты процесса пилотирования летательного аппарата за счет резкого снижения вероятности непреднамеренного вывода летательного аппарата на закритические углы атаки и предоставления пилоту информации о текущем угле атаки в наиболее доступном и очевидном для него виде - через изменение нейтрального положения органа управления, используемого для управления в продольном канале.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2645522C1 |
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ И ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2667410C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2653417C1 |
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2666093C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СВАЛИВАНИЯ | 2017 |
|
RU2653414C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СКОЛЬЖЕНИЯ | 2020 |
|
RU2759370C1 |
| КРЫЛО С АЭРОДИНАМИЧЕСКОЙ ШТОРОЙ | 2016 |
|
RU2646686C2 |
| ЗАКОНЦОВКА АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 2019 |
|
RU2719522C1 |
| АЭРОГИДРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ, ГРУППА ВИХРЕГЕНЕРАТОРОВ И СПОСОБ УСТАНОВКИ ГРУППЫ ВИХРЕГЕНЕРАТОРОВ | 2020 |
|
RU2749524C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2624760C1 |

Изобретение относится к летательным аппаратам с фиксированным крылом. Планер летательного аппарата содержит крыло и систему управления в продольном канале, включающую орган управления, шарнирно установленные опорный руль высоты и задающий руль высоты. Опорный руль высоты в полете ориентирован по направлению набегающего потока. Орган управления установлен с возможностью изменения взаимного расположения опорного руля высоты и задающего руля высоты. Задающее звено выполнено в виде органа управления. Орган управления установлен на планере с возможностью коррелировать положение опорного руля высоты при нулевом моменте тангажа, действующем на планер летательного аппарата. Планер содержит делитель, кинематические связи и орган управления. Опорный руль высоты и задающий руль высоты связаны посредством кинематических связей. Исполнение делителя обеспечивает отклонение в противофазе опорного и задающего рулей высоты при неподвижном органе управления и отклонение опорного и задающего рулей высоты в фазе при отклонении органа управления от нейтрального положения. Изобретение направлено на повышение безопасности полета при обеспечении высокого уровня топливной эффективности и простоты процесса пилотирования. 1 з.п. ф-лы, 4 ил.
1. Планер летательного аппарата, содержащий по меньшей мере одно крыло и систему управления в продольном канале, включающую в себя орган управления, а также шарнирно установленные на планере опорный руль высоты и задающий руль высоты, при этом опорный руль высоты в полете ориентирован по направлению набегающего потока, орган управления установлен с возможностью изменения взаимного расположения опорного руля высоты и задающего руля высоты, задающее звено выполнено в виде органа управления и установлено на планере летательного аппарата, а орган управления установлен на планере так, что его положение коррелируется с положением опорного руля высоты при нулевом моменте тангажа, действующем на планер летательного аппарата, отличающийся тем, что содержит делитель и кинематические связи, при этом орган управления, опорный руль высоты и задающий руль высоты связаны между собой посредством кинематических связей, шарнирный момент опорного руля высоты при равной величине скоростного напора в два и более раза выше шарнирного момента задающего руля высоты, а конструктивное исполнение делителя обеспечивает отклонение в противофазе опорного и задающего рулей высоты при неподвижном органе управления и отклонение опорного и задающего рулей высоты в фазе при отклонении органа управления от нейтрального положения.
2. Планер летательного аппарата по п.1, отличающийся тем, что планер содержит горизонтальное оперение, расположенное позади аэродинамического фокуса крыла, система управления в продольном канале содержит регулируемые упоры, установленные на планере с возможностью ограничения расхода органа управления, опорный руль высоты выполнен в виде штанги с аэродинамической поверхностью на свободном конце, шарнирно установленной в задней части планера, при этом аэродинамическая поверхность штанги расположена позади задающего руля высоты, задающий руль высоты шарнирно установлен на задней кромке горизонтального оперения и скомпенсирован по массе относительно собственной оси вращения, а система, состоящая из штанги с аэродинамической поверхностью, делителя и кинематических связей, скомпенсирована по массе относительно оси вращения штанги.
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРЕДОТВРАЩЕНИЯ ВЫХОДА УГЛА ТАНГАЖА САМОЛЕТА ЗА ПРЕДЕЛЫ ЭКСПЛУАТАЦИОННОГО ДИАПАЗОНА | 2011 |
|
RU2490168C1 |
| ШТАМП ДЛЯ ХОЛОДНОЙ ШТАМПОВКИ (ВЫДАВЛИВАНИЯ) СЛОЖНЫХ РЕЛЬЕФОВ В МЕТАЛЛЕ | 1948 |
|
SU79193A1 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| RU 2012126594 A, 10.01.2014 | |||
| US 5100081 A1, 31.03.1992. | |||

