Изобретение относится к области лазерных информационно-измерительных систем и может быть использовано как датчик угловой скорости в системах навигации и управления движением различных объектов.
В настоящее время оптические гироскопы почти полностью заменили механические гироскопы благодаря ряду своих преимуществ - малым габаритам и весу, низкому электропотреблению, высокой точности, быстрой готовности к работе и пр. Являясь приборами для измерения угловой скорости и основанные на эффекте Саньяка, оптические гироскопы делятся на два типа - лазерные гироскопы (ЛГ) и волоконно-оптические гироскопы (ВОГ). Отличие в том, что ЛГ относится к кольцевым лазерам, а измеряемой величиной является частота биений волн, тогда как ВОГ относятся к кольцевым интерферометрам, на вход которых подается широкополосное оптическое излучение, а измеряемой величиной является разность фаз волн на выходе.
Гироскопы обоих типов имеют близкие технические характеристики, одни и те же области применения и конкурируют друг с другом. Однако в тех случаях, когда требования наиболее строгие, используются ЛГ, так как их параметры несколько более высокие, а сами они прошли проверку, работая в составе самых ответственных устройств и систем. ВОГ проще и дешевле в изготовлении, так как в них используются сравнительно недорогие световоды и другие компоненты из большой элементной базы, общей для ВОГ и техники волоконно-оптических линий связи (ВОЛС).
Целью настоящего изобретения является создание гироскопа, обладающего преимуществами ЛГ в технических характеристиках и одновременно более простого, дешевого в изготовлении за счет использования элементной базы ВОГ и ВОЛС, а также более долговечного и надежного как полностью твердотельного устройства.
Известно, что основными ограничениям при создании ЛГ являются явление захвата (синхронизации) частот, возникающее в результате обратного рассеяния волн, а также дрейф нуля, то есть медленно изменяющийся сигнал на выходе гироскопа в отсутствие вращения; оба фактора препятствуют измерению малых скоростей вращения, что представляет главный интерес для практики.
Поэтому единственным типом ЛГ, имеющим практическое применение, до сих пор остается He-Ne-ый гироскоп, уровень обратного рассеяния в котором минимальный и работа которого, тем не менее, возможна лишь с использованием частотной подставки, подавляющей захват частот. (Ароновиц Ф.В сб. «Применение лазеров». Пер.с англ. под ред. М. Росса. М. Мир. 1971).
Наиболее же эффективным средством уменьшения дрейфа нуля является использование так называемого четырехчастотного гироскопа DILAG (В. Yntema, D.С. Grant, Jr., and R.Т. Warner, "Differential Laser Gyro System", U.S. Patent 3,862,803, 1975). (B. Yntema, D.C. Grant, Jr., and R.T. Warner, "Differential Laser Gyro System", U. S. Patent 3,862,803, 1975). Гироскоп DILAG развивался во многих зарубежных фирмах, таких как Litton, Northrop и пр.; отечественными разработчиками как менее сложный вариант был предложен так называемый квазичетырехчастотный гироскоп (Голяев Ю.Д., Дмитриев В.Г., Казаков А.А. и др. "Способ измерения угловых перемещений лазерным гироскопом". Патент РФ №2408844, 10.01.2011 г).
Высокая стабильность и малый уровень дрейфа нуля в гироскопах DILAG определяется тем, что такие устройства представляют собой как бы два обычных, «двухчастотных», ЛГ с одним общим резонатором. Регистрация и обработка биений на двух выходах гироскопов DILAG позволяет взаимно компенсировать (вычесть) шумовые составляющие и усилить полезный сигнал.
Недостатком He-Ne-ых ЛГ является трудоемкость изготовления, связанная с использованием прецизионных зеркал с высоким коэффициентом отражения, вакуумной технологии, высоковольтного питания и, в случае гироскопов DILAG, дополнительно кольцевого резонатора с неплоским контуром, режима генерации с круговой поляризацией волн, магнитооптических методов создания подставки на основе эффектов Фарадея и Зеемана и пр. Недостатком является также использование в качестве среды усиления газовой среды, неустойчивой при длительном хранении.
Поэтому после появления доступных для практического использования полупроводниковых оптических усилителей (ПОУ) возникло представление, что применение ПОУ в качестве среды усиления, а световодов в качестве кольцевого резонатора, могло привести к созданию ЛГ нового типа. В таком случае устройство было бы более дешевым, а твердотельное исполнение гарантировало большую надежность и долговечность. Однако все усилия создать ЛГ на основе ПОУ со сколько-нибудь приемлемыми характеристиками долго оставались неудачными, причиной чего был большой уровень обратного рассеяния в ПОУ, не позволявший использовать частотную подставку для подавления захвата частот, а также многомодовый характер генерации. В результате биения возникали лишь при большой скорости вращения, а их амплитуда была настолько малой, что биения можно было выделить из шумов лишь с помощью радиочастотного спектрометра, весьма сложного и дорого устройства.
Реальная возможность создания ЛГ на основе ПОУ появилась когда был предложен и экспериментально проверен новый подход (Прокофьева Л.П., Сахаров В.К., Щербаков В.В. Полупроводниковый лазерный гироскоп с частотной подставкой. Квантовая электроника, Т.44, №4, С.362, 2001 г.). Как была показано, деструктивное действие обратного рассеяния компенсируется большой длиной кольцевого резонатора в виде световода, благодаря чему становится возможным использовать частотную подставку, причем весьма простую в реализации - создаваемую с помощью внутрирезонаторной фазовой модуляции. И что также важно, при многомодовом характере генерации амплитуда биения на выходе оказывается достаточно большой для регистрации биений обычным способом, например, с помощью осциллографа.
Этот подход был использован в многомодовом волоконном лазерном гироскопе, принимаемом в данном изобретении в качестве прототипа (Сахаров В.К., Многомодовый волоконный лазерный гироскоп. Патент РФ №2708700, 05.03.2018 г.). Сущность конструктивного решения прототипа состоит в следующем.
Устройство-прототип представляет собой кольцевой лазер, состоящий из среды усиления, кольцевого резонатора в виде смотанного в катушку световода, фазового модулятора для создания частотной подставки, спектрально-селективного узкополосного фильтра и волоконного разветвителя Х-типа, два порта которого служат для вывода части мощности излучения кольцевого лазера; прототип также включает устройство объединения выводимых из кольцевого лазера волн, фотоприемник и электронное устройство обработки биений, которое далее будем именовать как цифровое устройство обработки биений.
Предусматривается несколько вариантов выполнения прототипа - в качестве среды оптического усиления может использоваться как ПОУ, так и волоконный оптический усилитель (ВОУ); в качестве кольцевого резонатора - изотропные световоды (несохраняющие поляризацию излучения) или так называемые РМ-световоды (polarization maintaining, сохраняющие поляризацию); для сбивания волн может использоваться как отдельное устройство объединение волн, так и тот же волоконный разветвитель Х-типа, встроенный в кольцевой резонатор, для чего на торце одного из двух его выводных портов формируется диэлектрическое зеркало; периодическая (реверсивная) частотная подставка может создаваться с помощью пьезокерамического волоконного фазового модулятора или фазового электрооптического модулятора.
Основными факторами, обеспечивающими работу прототипа, как уже отмечалось, является использование твердотельной среды усиления, ПОУ или ВОУ, кольцевого резонатора в виде протяженного световода, реверсивной частотной подставки, а также цифрового устройства обработки биений. Рассмотрим работу этого устройства и факторы, определяющую метрологические характеристики прототипа.
На вход устройства поступает сигнал с фотоприемника в виде биений, возникающий в результате интерференция выводимых из кольцевого резонатора и сбиваемых встречных волн. На первом этапе обработки определяются частоты биений на соседних полупериодах реверсивной частотной подставки v+ и v-, каждая из которых является суммой трех частот - частоты подставки vd, саньяковской частоты vs и шумовой частоты  :
:

при этом саньяковская частота vs несет информацию о вращении:

где Ω - скорость вращения, Μ - масштабный коэффициент,

R - радиус катушки, λ - длина волны излучения, n - показатель преломления световода.
На следующем этапе обработки частоты v+ и v- комбинируются таким образом, что одна частота вычитается из другой, в результате частота подставки исключается и формируется выходной сигнал (частота) Nout:

являющийся суммой саньяковской частоты vs и шумовой частоты  , которая определяет величину дрейфа нуля
, которая определяет величину дрейфа нуля  на выходе устройства-прототипа:
на выходе устройства-прототипа:

Результаты испытаний прототипа показали, что его чувствительность (отношение частоты vs к скорости вращения Ω) определяется масштабным коэффициентом (3) и она такая же высокая как чувствительность обычных («двухчастотных») He-Ne-ых гироскопов.
Однако дрейф нуля  , составляющий около 20 град/час, оказался значительным; следовательно, пороговая чувствительность прототипа (определяемая как скорость вращения Ω, при которой частоты vs и
, составляющий около 20 град/час, оказался значительным; следовательно, пороговая чувствительность прототипа (определяемая как скорость вращения Ω, при которой частоты vs и  на выходе устройства, равны) невысокая и поэтому прототип годен для использования как датчик вращения лишь в системах умеренной точности.
на выходе устройства, равны) невысокая и поэтому прототип годен для использования как датчик вращения лишь в системах умеренной точности.
Основными причинами возникновения шумовой частоты , а, следовательно, дрейфа нуля  , являются медленно изменяющаяся температура среды усиления и нестабильность поляризации волн в кольцевом резонаторе. Дрейф температуры среды усиления вызывает изменение показателя преломления среды усиления, что в свою очередь приводит к фазовым флуктуациям в циркулирующих волнах и, соответственно, к флуктуациям частоты биений, то есть частоты
, являются медленно изменяющаяся температура среды усиления и нестабильность поляризации волн в кольцевом резонаторе. Дрейф температуры среды усиления вызывает изменение показателя преломления среды усиления, что в свою очередь приводит к фазовым флуктуациям в циркулирующих волнах и, соответственно, к флуктуациям частоты биений, то есть частоты . Деполяризация излучения также приводит к фазовым флуктуациям, но она устраняется, если в качестве кольцевого резонатора используются РМ-световоды. Естественно, кроме двух указанных дестабилизирующих факторов существуют и другие, однако их влияние менее значительное.
. Деполяризация излучения также приводит к фазовым флуктуациям, но она устраняется, если в качестве кольцевого резонатора используются РМ-световоды. Естественно, кроме двух указанных дестабилизирующих факторов существуют и другие, однако их влияние менее значительное.
Наконец отметим, что уменьшить уровень дрейфа нуля в прототипе путем прямого переноса средств и способа, используемых в гироскопах DILAG, невозможно в виду существенных отличий конструкций, методов создания подставки и, главное, из-за неосуществимости «четырехчастотного» режима генерации в многомодовом ЛГ, где число частот (мод) тысячи и более.
Таким образом, задача создания ЛГ с техническими характеристиками, не уступающими характеристикам He-Ne-го гироскопа, но менее сложного в изготовлении и более надежного и долговечного, оставалась важной и актуальной, но нерешенной. Необходимо было изыскать средства существенно повысить технические характеристики прототипа, сохранив его преимущества в экономичности и технологичности как построенного с использование элементов, используемых в технике ВОГ и ВОЛС, а также, что не менее важно, как твердотельного устройства.
Указанная задача решена настоящим изобретением, в котором используются два выходных канала для формирования биений с различной комбинацией полезной и шумовой составляющих (соответственно, частот vs и ) и последующая обработка биений, позволяющая путем комбинации (вычитания) биений подавить шумовую частоту , выделить и усилить санбяковскую частоту vs, содержащую информацию о величине и направлении скорости вращения. Техническим результатом изобретения является повышение чувствительности и снижение дрейфа нуля ЛГ, а также повышение долговечности и надежности ЛГ в результате использования твердотельного оптического усилителя.
Заявляемое устройство, дифференциальный многомодовый волоконный лазерный гироскоп, содержит кольцевой лазер, состоящий из кольцевого резонатора в виде смотанного в катушку световода, оптического усилителя, фазового модулятора, спектрально-селективный узкополосного фильтра и двух волоконных разветвителей Х-типа, встроенных двумя портами в кольцевой резонатор, и использующих два других порта для вывода двух пар встречных волн, два устройства объединения выводимых волн, два фотоприемных устройства, два радиочастотных фильтра нижних частот и цифровое устройство обработки биений.
Целесообразно, чтобы согласно настоящему изобретению оптический усилитель и фазовый модулятор были расположены рядом друг с другом, а разветвители Х-типа, используемые для вывода излучения, расположены по обе стороны от них.
Целесообразно, чтобы согласно настоящему изобретению волоконные разветвители Х-типа, каждый, дополнительно выполняли роль устройства объединения выводимой пары волн, для чего на одном из двух выходных портов каждого волоконного разветвителя Х-типа смонтировано зеркало.
Целесообразно, чтобы согласно настоящему изобретению цифровое устройство обработки биений включало генератор сигналов фазовой модуляции, аналого-цифровой преобразователь фототока и вычислительное устройство, выполняющее обработку биений двух пар выводимых волн.
Целесообразно, чтобы согласно настоящему изобретению генератор сигналов фазовой модуляции использовался для подачи на фазовый модулятор сигналов, создающих знакопеременную частотную подставку.
Целесообразно, чтобы согласно настоящему изобретению частота отсечки радиочастотных фильтров низкой частоты была ниже частоты межмодовых биений Δv=c/Ln, где с - скорость света, L - длина кольцевого резонатора в виде световода и n - показатель преломления световода.
Целесообразно, чтобы согласно настоящему изобретению в качестве оптического усилителя использовался полупроводниковый оптический усилитель.
Целесообразно, чтобы согласно настоящему изобретению в качестве оптического усилителя использовался волоконный оптический усилитель, активированный ионами редкоземельного металла.
Целесообразно, чтобы согласно настоящему изобретению в качестве фазового модулятора использовался электрооптический фазовый модулятор.
Целесообразно, чтобы согласно настоящему изобретению в качестве фазового модулятора использовался волоконный пьезокерамический фазовый модулятор.
Изобретение поясняется чертежами, на которых показаны:
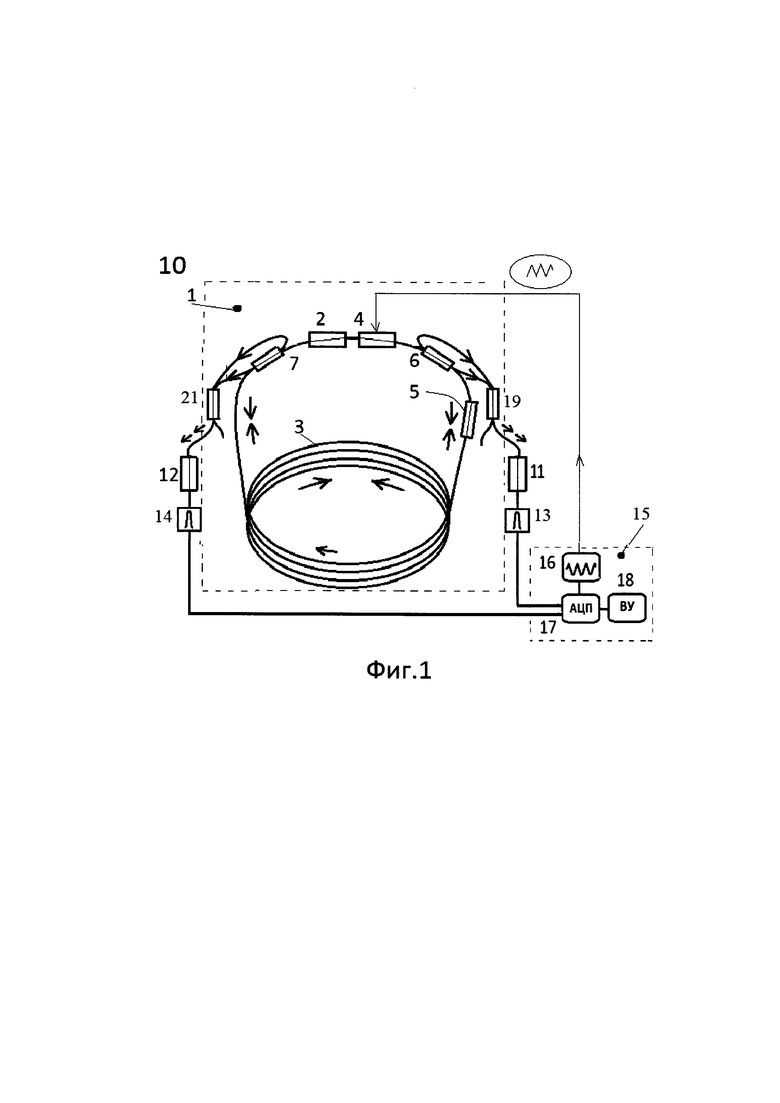
Фиг. 1 - схема устройства с использованием полупроводникового оптического усилителя;
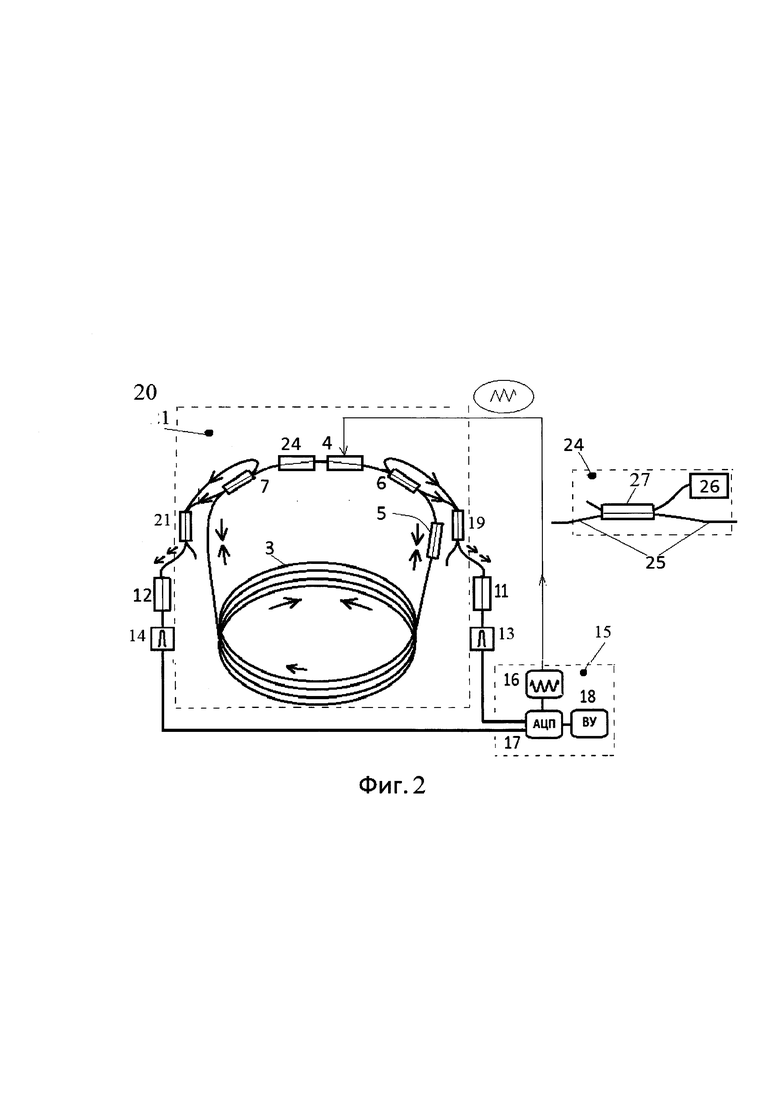
Фиг. 2 - схема устройства с использованием волоконного оптического усилителя;
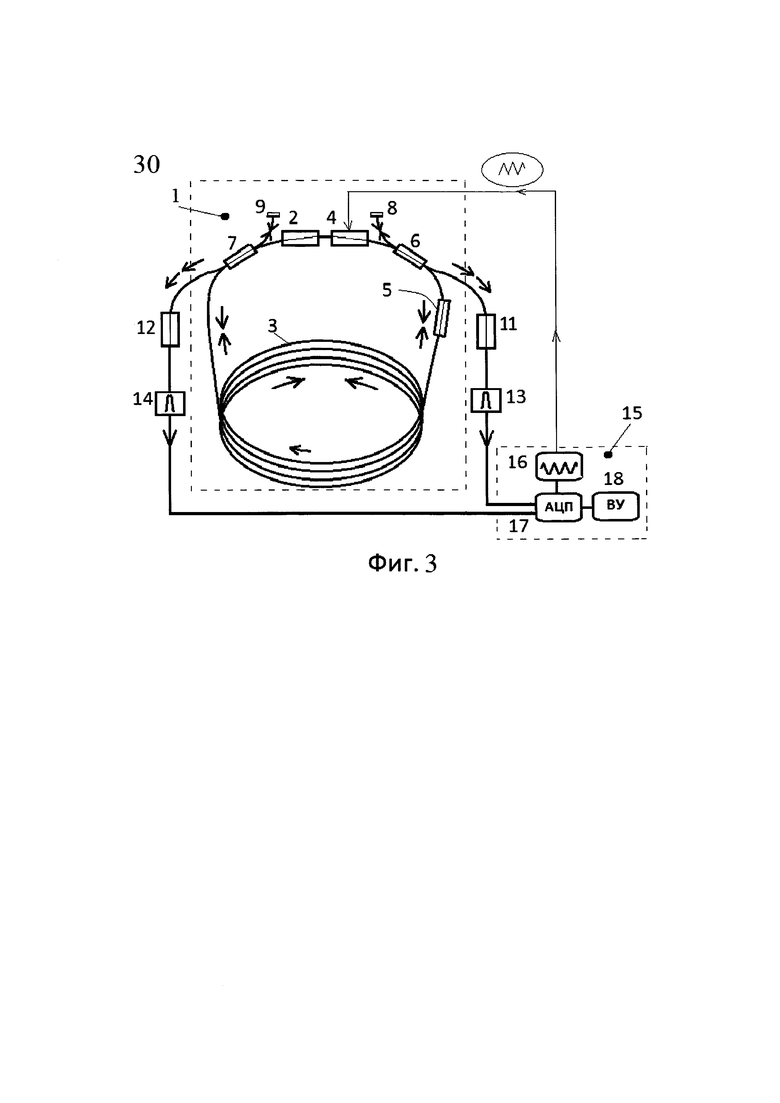
Фиг.3 - схема устройства, в котором объединение выводимых волн производится с помощью разветвителей Х-типа с диэлектрическим зеркалом на торце одного из выводов.
На Фиг. 1 приведена схема дифференциального многомодового волоконного лазерного гироскопа 10 с использованием полупроводникового оптического усилителя (ПОУ).
Устройство 10 содержит кольцевой лазер 1, включающий ПОУ 2, кольцевой резонатор в виде смотанного в многовитковую катушку РМ-световода большой длины 3, электрооптический фазовый модулятор 4, спектрально-селективный узкополосный фильтр 5, волоконные разветвители Х-типа 6 и 7, устройства объединения выводимых волн, в качестве которых выступают волоконные разветвители 19 и 21, фотоприемники 11 и 12, радиочастотные фильтры нижних частот 13 и 14; устройство 10 включает также цифровое устройство обработки биений 15, состоящее из генератора сигналов фазовой модуляции 16, АЦП 17 и цифрового вычислительного устройства 18.
В качестве ПОУ 2 используется лазерная структура InGaAsP/InP длиной 1.2 мм с рабочей длиной волны в диапазоне 1.55 мкм.
Кольцевой резонатор представляет собой РМ-световода 3 длиной L=500 м, смотанный на катушку с радиусом R=5 см. Большая длина кольцевого резонатора уменьшает ширину зоны захвата до 2-5 кГц, позволяя использовать частотную подставку, а РМ-световоды (сохраняющие поляризацию волн, циркулирующих в кольцевом резонаторе) обеспечивают стабильность выходного сигнала.
Кольцевой резонатор значительной длины определяет многомодовый характер генерации, однако в данном случае это не является ограничением, так как благодаря ряду факторов - малой спектральной ширине мод, участвующих в генерации, однородного характера спектрального уширения и др. - амплитуда биения на выходе достаточно большая для регистрации.
Фазовый электрооптический модулятор 4 представляет собой планарную структуру на кристалле ниобата лития, LiNbO3. Знакопеременная частотная подставка создается при подаче на фазовый модулятор 4 от генератора сигналов фазовой модуляции 16 напряжения синусоидальной или треугольной формы частотой 1,7-2,5 кГц и амплитудой 100 В.
Спектрально-селективный узкополосного фильтра 5 с полосой пропускания Δλ≈1 нм ограничивает ширину оптического спектра генерируемого излучения. Волоконные разветвители Х-типа 6 и 7, сохраняющие поляризацию волн на всех своих выводах, выполняют вывод части - не более 5% - мощности волн циркулирующих в кольцевом лазере навстречу друг другу. Волоконные разветвители 19 и 21, также сохраняющие поляризацию, объединяют и направляют выводимые волны к фотоприемным устройствам 11 и 12.
Сигналы с фотоприемников 11 и 12 пропускается через радиочастотные фильтры нижних частот 13 и 14, частота отсечки которых около 100 кГц, что ниже частоты межмодовых биений 408 кГц. Таким образом, фильтры нижних частот 13 и 14 подавляют межмодовые биения, которые в отсутствие фильтров могли быть источником дополнительных шумовых помех.
Возможность уменьшения дрейфа нуля  возникающего из-за температурной нестабильности среды усиления, определяется механизмом возникновения шумовой частоты
возникающего из-за температурной нестабильности среды усиления, определяется механизмом возникновения шумовой частоты , идентичного механизму, создающему частотную подставку. Оба возникают в результате динамики возбуждающих сигналов и разного времени пробега волн от места возбуждения до места вывода и интерференции волн; при этом в одном случае возбуждающим сигналом является фазовая модуляция, в другом - флуктуации температуры среды усиления.
, идентичного механизму, создающему частотную подставку. Оба возникают в результате динамики возбуждающих сигналов и разного времени пробега волн от места возбуждения до места вывода и интерференции волн; при этом в одном случае возбуждающим сигналом является фазовая модуляция, в другом - флуктуации температуры среды усиления.
Покажем, как использование двух каналов вывода встречных волн, размещаемых по разные стороны от ПОУ и фазового модулятора, позволяет компенсировать температурные флуктуации, возникающие в оптическом усилителе и, соответственно, подавить вызываемый этими флуктуациями дрейф нуля в выходном сигнале.
Пусть на фазовый модулятор подается периодический сигнал Ufm(t) с частотой  в виде равнобедренного треугольника, создающий фазовую модуляцию Φ(t) треугольной формы с амплитудой Ф0, что, в свою очередь, приводит к созданию реверсивной подставки в виде меандра. Предположим, что температура ПОУ медленно изменяется, монотонно возрастая и внося в обе пробегающие волны одну и ту же фазу δΝ. Не учитывая детали работы разветвителей 6 и 7, полагаем, что вывод волн из кольцевого резонатора производится в точках «1» и «2», находящихся в центре, соответственно, разветвителей 6 и 7. Ради простоты полагаем также, что пути пробега выводимых волн от места вывода до фотоприемника равные.
в виде равнобедренного треугольника, создающий фазовую модуляцию Φ(t) треугольной формы с амплитудой Ф0, что, в свою очередь, приводит к созданию реверсивной подставки в виде меандра. Предположим, что температура ПОУ медленно изменяется, монотонно возрастая и внося в обе пробегающие волны одну и ту же фазу δΝ. Не учитывая детали работы разветвителей 6 и 7, полагаем, что вывод волн из кольцевого резонатора производится в точках «1» и «2», находящихся в центре, соответственно, разветвителей 6 и 7. Ради простоты полагаем также, что пути пробега выводимых волн от места вывода до фотоприемника равные.
Известно, что при внутрирезонаторной модуляции частота биений выводимых встречных волн Ecw и Eccw (распространяющихся по ходу часовой стрелки и против, clockwise and counterclockwise waves), определяется отношением, в знаменателе которого время циркуляции волн по длине кольцевого резонатора τ=Ln/c, а в числителе - разность фаз встречных волн в точках вывода в рассматриваемый момент (Сахаров В.К. Квантовая электроника, т.46, №6, С.567, 2016 г.). В нашем случае разность фаз в числителе является суммой разностей фаз, возникающих в результате динамики нескольких процессов - знакопеременной фазовой модуляции (фазы Фcw, и Фccw), температурных нестабильностей (фазы  и
и  ) и эффекта Саньяка (фазы
) и эффекта Саньяка (фазы  и
и  ):
):

где модуль означает, что реально измеряемая частота имеет положительное значение.
Разности фаз модуляции Фcw и Фccw и фазовых флуктуаций  и
и  зависят от положения места вывода и, соответственно, от задержки времен пробега встречных волн от модулятора и ПОУ к этим точкам и характера возбуждающих сигналов - возрастают они или убывают. Разность саньяковских фаз
зависят от положения места вывода и, соответственно, от задержки времен пробега встречных волн от модулятора и ПОУ к этим точкам и характера возбуждающих сигналов - возрастают они или убывают. Разность саньяковских фаз  и
и  не зависит от положения точек вывода, так как эти фазы равны по абсолютной величине и имеют противоположные знаки, т.е.
не зависит от положения точек вывода, так как эти фазы равны по абсолютной величине и имеют противоположные знаки, т.е.  .
.
Каждой паре фаз отвечает своя частота, поэтому сигналы на выходах «1» и «2» определяются тремя частотами - частотой подставки vd, саньяковской частотой vs и шумовой частотой  :
:
где Δτ - разность времен пробега встречных волн от модулятора до точки вывод.
Определяя частоту биений на выходе в точке «1», будем иметь в виду, что частота подставки vd, как правило, на несколько порядков выше, чем частоты vN и vs. На интервале возрастания сигнала модуляции разности фаз (Фcw-Фccw) и  имеют положительные значения, так как волна Ecw от ПОУ прибегает к точке «1» быстрее, чем волна Eccw; тогда частота биений выводимых волн при возрастании сигнала модуляции есть
имеют положительные значения, так как волна Ecw от ПОУ прибегает к точке «1» быстрее, чем волна Eccw; тогда частота биений выводимых волн при возрастании сигнала модуляции есть

где знак перед частотой vs определяется саньяковской разностью фаз  , которая ради определенности здесь также положительная.
, которая ради определенности здесь также положительная.
На интервале убывания сигнала модуляции разность фаз (Фcw-Φccw) отрицательная, так как теперь до точки «1» быстрее прибегает волна Eccw, а разности фаз  и
и  остаются положительными, и так как частота биений
остаются положительными, и так как частота биений  должна иметь положительное значение, то
должна иметь положительное значение, то

Продолжая аналогичным образом, нетрудно определить частоту биений выводимых волн в точке «2» на двух соседних интервалах подставки:

В результате частоты биений в точках «1» и «2» на соседних интервалах подставки есть  и
и  . Вычислительное устройство 18, входящее в состав цифрового устройства обработки биений 15, вычитая в каждой паре одну частоту из другой и исключая таким образом частоту подставки vd, формирует два сигнала:
. Вычислительное устройство 18, входящее в состав цифрового устройства обработки биений 15, вычитая в каждой паре одну частоту из другой и исключая таким образом частоту подставки vd, формирует два сигнала:

Как можно видеть, сигнал Ν1 является суммой полезного сигнала и шума, а сигнал Ν2 - их разностью.
Далее вычислительное устройство 18 производит следующую операцию - вычитает сигнал Ν2 из сигнала Ν1, исключая таким образом шумовую составляющую  в формируемом выходном сигнале (частоте):
в формируемом выходном сигнале (частоте):

Сравнивая (4) и (12), можно сделать вывод, что чувствительность устройства 10 в два раза выше, чем чувствительность прототипа, и что выходной сигнал Nout не содержит шумовой составляющей, являющихся основной причиной дрейфа нуля. Следовательно, уменьшается величина дрейфа нудя  и, соответственно, увеличивается пороговая чувствительность.
и, соответственно, увеличивается пороговая чувствительность.
Отметим, что в реальном устройстве, выполненном согласно настоящему изобретению, кроме температурных флуктуаций в ПОУ существуют и другие флуктуации, однако их воздействие существенно слабее и они будут подавлены также полностью или частично. Например, нестабильность температуры световода, образующего кольцевой резонатор, принципиально вносит свой вклад в шумовую частоту  : Однако это проявится одинаковым образом в сигналах N1 и N2 и поэтому операция вычитания (12) обнулит данные шумы.
: Однако это проявится одинаковым образом в сигналах N1 и N2 и поэтому операция вычитания (12) обнулит данные шумы.
На Фиг. 2 приведена схема дифференциального многомодового волоконного лазерного гироскопа 20 с использованием волоконного оптического усилителя (ВОУ), отличающегося от устройства 10 лишь заменой оптического усилителя - вместо ПОУ 2 теперь используется ВОУ 24.
ВОУ 24 включает среду усиления в виде активированного ионами эрбия Er+ одномодового световода 25 длиной не более 20 см, лазер накачки 26 и оптический мультиплексор 27, с помощью которого волна накачки вводится в среду усиления. Длина волны циркулирующих в кольцевом лазере волн лежит также в диапазоне 1.55 мкм, длина волны излучения лазера накачки 0.98 мкм.
Устройство 20 также обеспечивает снижение дрейфа нуля и повышение чувствительности, так как на всех стадиях работы, кроме оптического усиления волн, его работа аналогична работе устройства 10. Преимущество устройства 20 в том, что в ВОУ в современной технике используются гораздо шире, чем ПОУ. Следовательно, данный вариант может быть более экономичным.
На Фиг. 3 схема дифференциального многомодового волоконного лазерного гироскопа 30, в котором объединение выводимых волн производится с помощью разветвителей Х-типа с диэлектрическим зеркалом на торце одного из двух выводов.
Данное устройство отличается от устройства 10 отсутствием разветвителей 19 и 21, функцию которых - объединение выводимых волн - выполняют разветвители 6 и 7, на торцы одно из портов которых напылены диэлектрические зеркала 8 и 9 с коэффициентом отражения 100% для рабочей длины волны.
Объединение выводимых пар волн происходит в силу известных свойств симметрии коэффициентов передачи волоконных разветвителей Х-типа, благодаря которым выводимая волна (мощностью 5%), отразившись от зеркала и пройдя в обратном направлении через тот же разветвитель, почти полностью (5%⋅0,95=4,75%) перейдет на другой вывод разветвителя. Таким образом, на выводе разветвителя, подключенному к фотоприемному устройству, окажутся две волны, в результате интерференции которых возникнут биения.
Преимущество данного варианта заключается в том, что стоимость одного разветвителя с зеркалом меньше, чем стоимость двух разветвителей, используемых для вывода волн из кольцевого резонатора и объединения. В остальной части работа устройства 30, а также характер генерируемого излучения аналогичны работе и характеру излучения в устройства 10; выходной сигнал в устройстве 30 также определяется выражением (12).
Во всех трех рассмотренных выше вариантах реализации заявляемого устройства вместо электрооптического фазового модулятора может использоваться волоконный пьезомеханический фазовый модулятор, представляющий собой пьезокерамический цилиндра, на боковую поверхность которого намотан РМ-световод небольшой длины, порядка 10 м.
Подводя итог, отметим, что существенно отличаясь от гироскопов DILAG по конструкции, характеру генерируемого излучения и способу создания частотной подставки, заявляемое устройство позволяет также, как DILAG, существенно снизить дрейф нуля и повысить чувствительность. В свою очередь это позволит снизить уровень минимально измеряемой скорости вращения и повысить точность измерений. Использование твердотельных оптических усилителей, ПОУ или ВОУ, принадлежащих элементной базы современных систем ВОЛС, позволит увеличить долговечность, надежность, экономичность и технологичность ЛГ.
Заявляемое устройство может найти применение в навигации и автоматическом управлении движением, в системах индикации поворотов транспортных средств, стабилизации антенн и телеобъективов в направлении движущихся объектов, в робототехнике и многих других устройствах и системах.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОМОДОВЫЙ ВОЛОКОННЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2018 |
|
RU2708700C2 |
| ТВЕРДОТЕЛЬНЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2009 |
|
RU2421689C1 |
| ПОЛУПРОВОДНИКОВЫЙ ЛАЗЕРНЫЙ ГИРОСКОП (ВАРИАНТЫ) | 2010 |
|
RU2451906C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СПЕКТРАЛЬНЫХ ХАРАКТЕРИСТИК ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2009 |
|
RU2408853C1 |
| ОПТИЧЕСКИЙ ГИРОСКОП С ПАССИВНЫМ КОЛЬЦЕВЫМ РЕЗОНАТОРОМ | 1997 |
|
RU2124185C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 1994 |
|
RU2112927C1 |
| СИСТЕМА РЕГУЛИРОВКИ ПЕРИМЕТРА ЗЕЕМАНОВСКОГО ЛАЗЕРНОГО ГИРОСКОПА | 2015 |
|
RU2589756C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАССЕИВАЮЩЕГО ПРОСТРАНСТВЕННО РАСПРЕДЕЛЕННОГО ОБЪЕКТА И ДОПЛЕРОВСКИЙ НИЗКОКОГЕРЕНТНЫЙ ЛИДАР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2365942C1 |
| СПОСОБ ПОДАВЛЕНИЯ ЛАЗЕРНЫХ СПЕКЛОВ В ОПТИЧЕСКИХ СКАНИРУЮЩИХ ДИСПЛЕЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2282228C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ УСТРОЙСТВА ВВОДА-ВЫВОДА ИЗЛУЧЕНИЯ В КОЛЬЦЕВОМ ИНТЕРФЕРОМЕТРЕ ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА НА ОСНОВЕ СПЕЦИАЛЬНОГО ДВУЖИЛЬНОГО СВЕТОВОДА | 2000 |
|
RU2188443C2 |
Изобретение относится к области лазерных информационно-измерительных систем и может быть использовано как датчик угловой скорости; оно содержит кольцевой лазер, состоящий из кольцевого резонатора, оптического усилителя, фазового модулятора, спектрально-селективного узкополосного фильтра и двух волоконных разветвителей для вывода волн из резонатора; в качестве оптического усилителя используется полупроводниковый или волоконный оптический усилитель, в качестве кольцевого резонатора - световод большой длины; устройство содержит также два канала регистрации биений и цифровую систему обработки биений, с помощью которой в выходном сигнале, несущем информацию о вращении, подавляется шумовая составляющая. 10 з.п. ф-лы, 3 ил.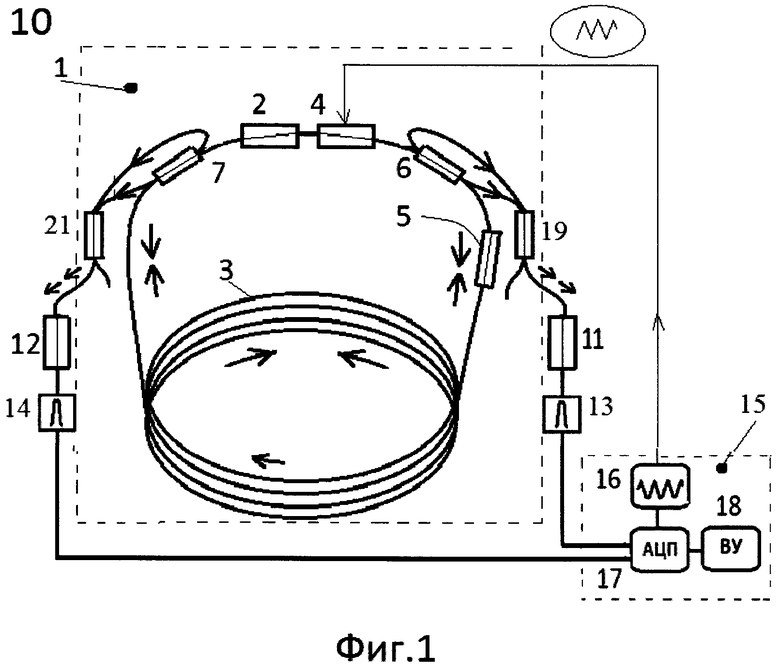
1. Дифференциальный многомодовый волоконный лазерный гироскоп, включающий кольцевой лазер, состоящий из кольцевого резонатора в виде смотанного в катушку световода, оптического усилителя, фазового модулятора, спектрально-селективного узкополосного фильтра и разветвителя Х-типа, встроенного двумя портами в кольцевой резонатор и использующего два других порта для вывода пары встречных волн, устройства объединения выводимых волн, фотоприемника для регистрации биений выводимых волн, и цифровое устройство обработки биений, отличающийся тем, что кольцевой лазер включает второй разветвитель Х-типа, встроенный двумя портами в кольцевой резонатор и использующий два других порта для вывода второй пары волн, второе устройство объединения пары выводимых волн, второй фотоприемник для регистрации биений второй пары выводимых волн и два радиочастотных фильтра нижних частот.
2. Лазерный гироскоп по п. 1, отличающийся тем, что оптический усилитель и фазовый модулятор расположены рядом друг с другом, а разветвители Х-типа, используемые для вывода излучения, расположены по обе стороны от них.
3. Лазерный гироскоп по п. 1, отличающийся тем, что волоконные разветвители X-типа, каждый, дополнительно выполняют роль устройства объединения выводимой пары волн, для чего на одном из двух выходных портов каждого волоконного разветвителя X-типа смонтировано зеркало.
4. Лазерный гироскоп по п. 1, отличающийся тем, что цифровое устройство обработки биений включает генератор сигналов фазовой модуляции, аналого-цифровой преобразователь фототока и вычислительное устройство, выполняющее обработку биений двух пар выводимых волн.
5. Лазерный гироскоп по п. 4, отличающийся тем, что генератор сигналов фазовой модуляции используется для подачи на фазовый модулятор сигналов, создающих знакопеременную частотную подставку.
6. Лазерный гироскоп по п. 1, отличающийся тем, что частота отсечки радиочастотных фильтров нижних частот ниже частоты межмодовых биений Δv=c/Ln, где с - скорость света в пустоте, L - длина кольцевого резонатора, n - показатель преломления световода кольцевого резонатора.
7. Лазерный гироскоп по п. 1, отличающийся тем, что в качестве устройств объединения пары выводимых волн используются первый и второй волоконные объединители, каждый из которых встроен между волоконным разветвителем Х-типа и радиочастотным фильтром нижних частот.
8. Лазерный гироскоп по п. 1, отличающийся тем, что в качестве оптического усилителя используется полупроводниковый оптический усилитель.
9. Лазерный гироскоп по п. 1, отличающийся тем, что в качестве оптического усилителя используется волоконный оптический усилитель, активированный ионами редкоземельного металла и имеющий ограниченную длину.
10. Лазерный гироскоп по п. 1, отличающийся тем, что в качестве фазового модулятора используется электрооптический фазовый модулятор.
11. Лазерный гироскоп по п. 1, отличающийся тем, что в качестве фазового модулятора используется волоконный пьезокерамический фазовый модулятор.
| МНОГОМОДОВЫЙ ВОЛОКОННЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2018 |
|
RU2708700C2 |
| ПОЛУПРОВОДНИКОВЫЙ ЛАЗЕРНЫЙ ГИРОСКОП (ВАРИАНТЫ) | 2010 |
|
RU2451906C1 |
| ТВЕРДОТЕЛЬНЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2009 |
|
RU2421689C1 |
| US 5453836 A, 26.09.1995. | |||

