Изобретение относится к гироскопам и измерительной технике и может быть использовано для регулировки периметра зеемановского лазерного гироскопа.
Известно устройство [RU 2270454, С2, G01R 25/00, G01R 27/28, 22.02.2006], содержащее два двухканальных мультиплексора, выходы которых подключены к входам измерителя временных сдвигов, выход измерителя временных сдвигов подключен к входу блока вычисления оценки разности группового времени запаздывания, входы одного из мультиплексоров подключаются к входам исследуемого усилителя, а входы другого мультиплексора - к выходам усилителя, при этом разность группового времени запаздывания сигналов, поступающих с выходов тестируемого усилителя, измеряется путем поочередного измерения запаздывания, возникающего в каждом из каналов усилителя.
Недостатком устройства являются относительно узкие функциональные возможности.
Известно также устройство [RU 136586, U1, G01R 29/02, H01S 3/083, 10.01.2014], содержащее первый делитель напряжения, коробку соединительную, первый и второй входы которой соединены с первым и вторым выходами датчика лазерных гироскопов, а группа входов соединена с группой выходов первого делителя напряжения, второй делитель напряжения, группа входов которого соединена с группой входов датчика лазерных гироскопов и с группой выходов коробки соединительной, выход которой соединен с входом второго делителя напряжения, а также осциллограф, первый вход которого соединен с выходом первого делителя напряжения, а второй и третий входы соединены с первым и вторым выходами второго делителя напряжения соответственно.
Недостатком этого устройства также является относительно узкие функциональные возможности.
Наиболее близким по технической сущности к предложенному является система регулировки периметра зеемановского лазерного гироскопа [Система регулировки периметра для зеемановского кольцевого лазера с настройкой на продольную моду с заданной четностью. Электронная техника. Лазерная техника и оптоэлектроника. Вып. 1(57), 1991, стр. 68], включающая фотоприемник излучения кольцевого лазера, вход которого является входом излучения кольцевого лазера, оснащенного пьезоприводом и содержащего блок частотной подставки, вход которого является входом сигнала знакопеременной подставки, а выход соединен с невзаимным устройством кольцевого лазера, включенным в его резонатор, синхронный детектор, первый вход которого соединен с выходом фотоприемника излучения кольцевого лазера, а второй вход является входом сигнала знакопеременной подставки, интегратор со сбросом, вход которого соединен с выходом синхронного детектора, и усилитель, первый вход которого соединен с выходом интегратора со сбросом, а выход соединен с пьезоприводом кольцевого лазера.
Эта система является замкнутой системой регулирования, использующая в качестве сигнала рассогласования сигнал интенсивности излучения в одном луче кольцевого лазера, а в качестве регулирующего элемента пьезоэлектрический привод кольцевого лазера.
Недостатком этой системы является относительно низкая точность, вызванная возникновением разности интенсивностей встречных волн, причиной которой, в частности, является анизотропия круговой поляризации встречных волн и неравенство коэффициента рассеяния встречных волн в резонаторе.
Задачей, которая решается в предложенном изобретении, является повышение точности регулировки.
Требуемый технический результат заключается в повышении точности регулировки периметра зеемановского лазерного гироскопа путем введения дополнительного арсенала технических средств, уменьшающих влияние разности интенсивностей встречных волн.
Поставленная задача решается, а требуемый технический результат достигается тем, что, в систему, включающую фотоприемник излучения кольцевого лазера, вход которого является входом излучения кольцевого лазера, оснащенного пьезоприводом и содержащего блок частотной подставки, вход которого является входом сигнала знакопеременной подставки, а выход соединен с невзаимным устройством кольцевого лазера, включенным в его резонатор, первый синхронный детектор, первый вход которого соединен с выходом фотоприемника излучения кольцевого лазера, а второй вход является входом сигнала знакопеременной подставки, интегратор со сбросом, вход которого соединен с выходом первого синхронного детектора, и усилитель, первый вход которого соединен с выходом интегратора со сбросом, а выход соединен с пьезоприводом кольцевого лазера, согласно изобретению введены второй синхронный детектор, первый вход которого является входом сигнала знакопеременной подставки, а второй вход соединен с выходом усилителя, интегратор, вход которого соединен с выходом второго синхронного детектора, и синхронный модулятор, первый вход которого является входом сигнала знакопеременной подставки, второй вход соединен с выходом интегратора, а выход соединен со вторым входом усилителя.
На чертеже представлены:
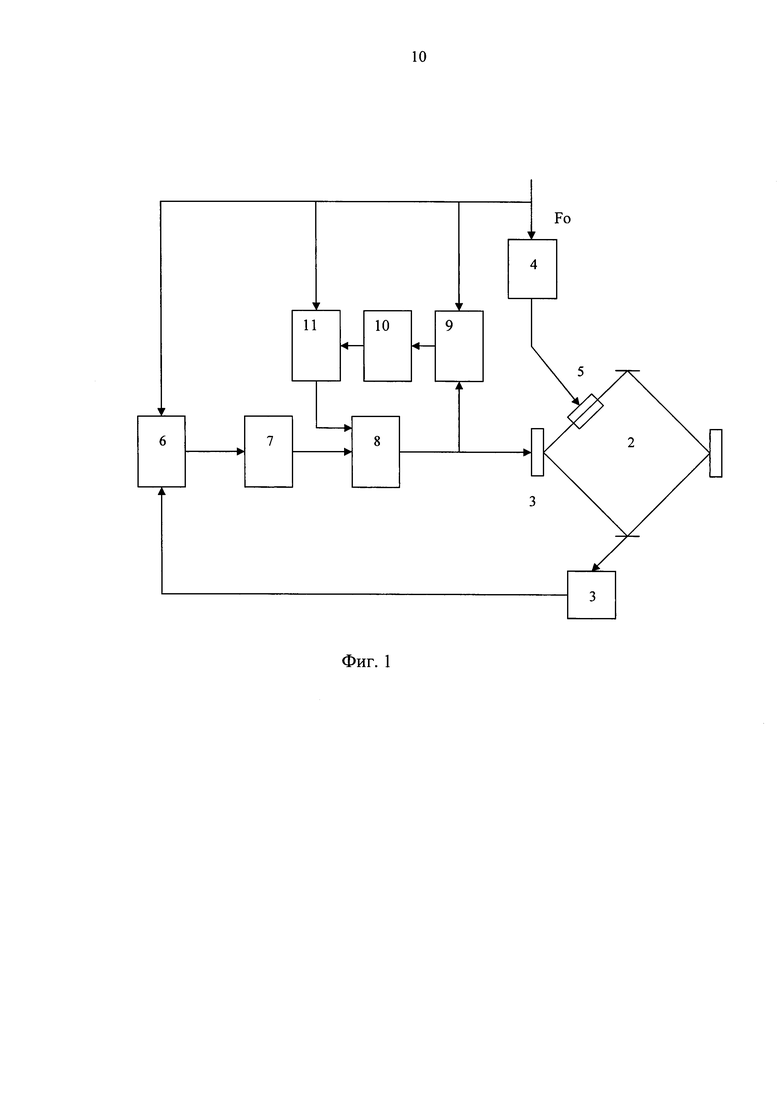
на фиг. 1 - функциональная схема системы регулировки периметра зеемановского лазерного гироскопа;
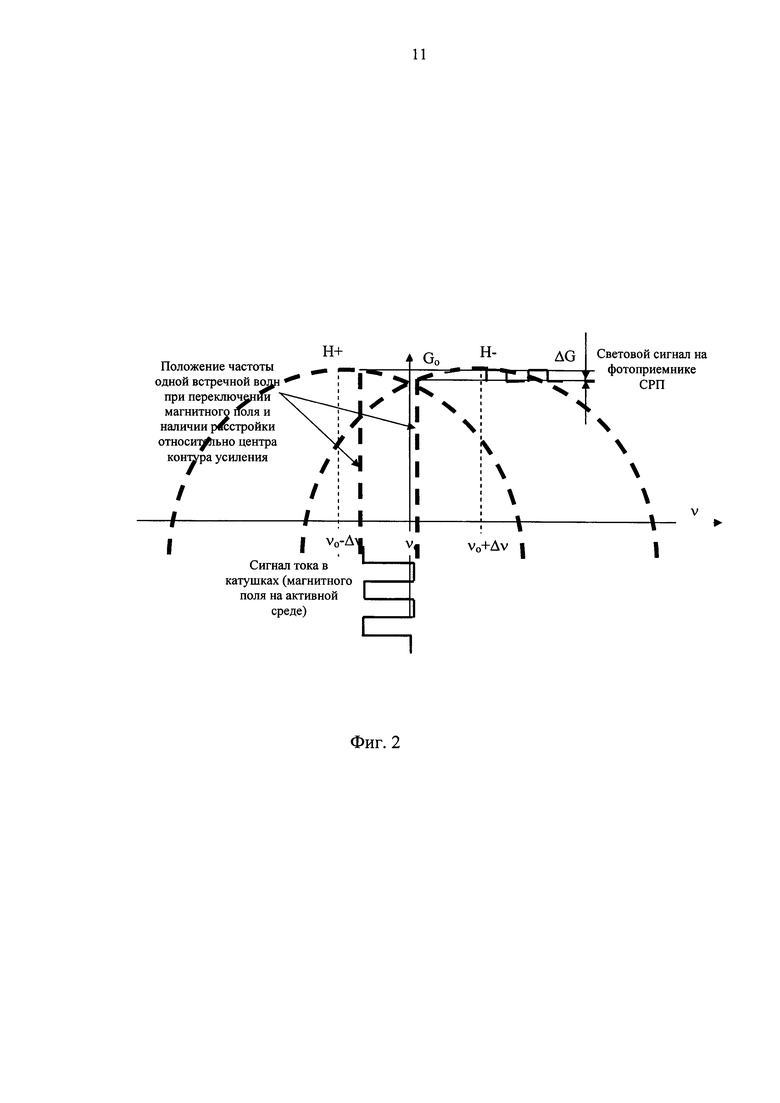
на фиг. 2 - рисунок, иллюстрирующий расстройку периметра (интенсивности в одном луче) в зеемановском лазерном гироскопе;
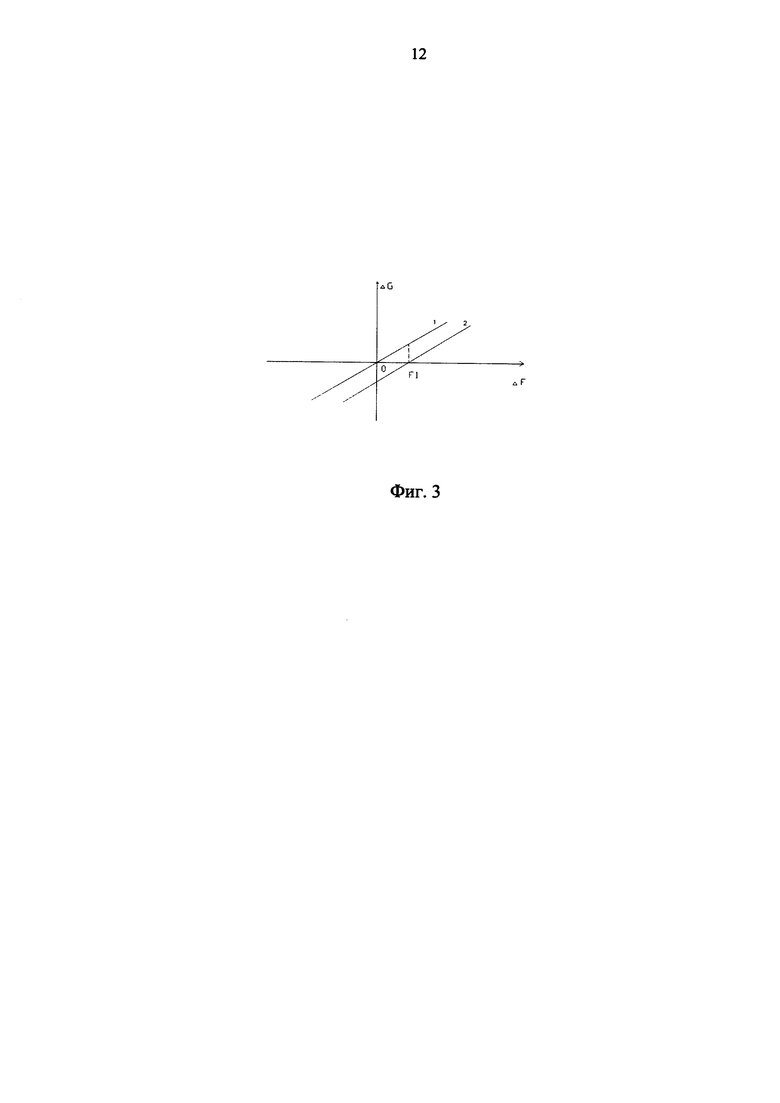
на фиг. 3 - зависимость амплитуды сигнала расстройки периметра от величины расстройки при равенстве интенсивностей встречных волн (кривая 1) и при неравных интенсивностях встречных волн (кривая 2);
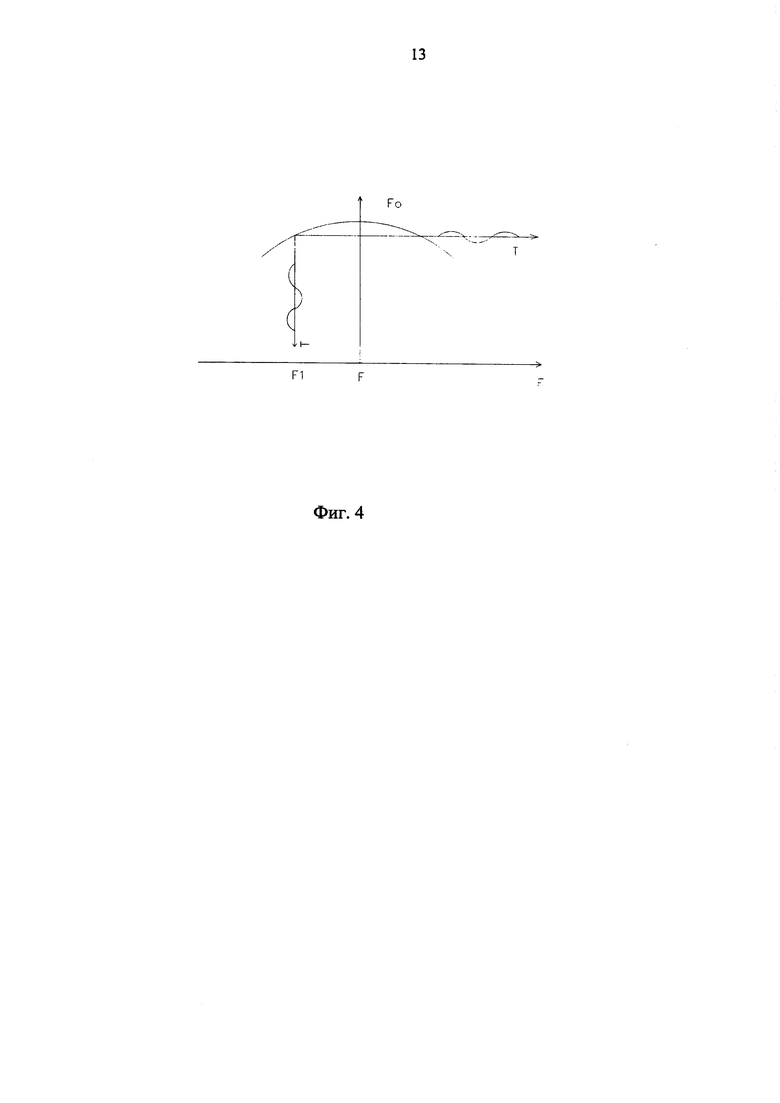
на фиг. 4 - зависимость частоты биений встречных волн на выходе кольцевого лазера от расстройки.
Система регулировки периметра зеемановского лазерного гироскопа (фиг. 1) включает фотоприемник 1 излучения кольцевого лазера 2, вход которого является входом излучения кольцевого лазера, оснащенного пьезоприводом 3 и содержащего блок 4 частотной подставки, вход которого является входом сигнала Fо знакопеременной подставки, а выход соединен с невзаимным устройством 5 кольцевого лазера 2, включенным в его резонатор.
Кроме того, система регулировки периметра зеемановского лазерного гироскопа содержит первый синхронный детектор 6, первый вход которого соединен с выходом фотоприемника 1 излучения кольцевого лазера, а второй вход является входом сигнала Fо знакопеременной подставки, интегратор 7 со сбросом, вход которого соединен с выходом первого синхронного детектора 6, и усилитель 8, первый вход которого соединен с выходом интегратора 7 со сбросом, а выход соединен с пьезоприводом 3 кольцевого лазера.
Система регулировки периметра зеемановского лазерного гироскопа содержит также второй синхронный детектор 9, первый вход которого является входом сигнала Fо знакопеременной подставки, а второй вход соединен с выходом усилителя 8, интегратор 10, вход которого соединен с выходом второго синхронного детектора 9, и синхронный модулятор 11, первый вход которого является входом сигнала Fо знакопеременной подставки, второй вход соединен с выходом интегратора 10, а выход соединен со вторым входом усилителя 8.
Работает система регулировки периметра зеемановского лазерного гироскопа следующим образом.
Для иллюстрации сущности изобретения рассмотрим принцип формирования сигнала расстройки периметра (интенсивности в одном луче) в зеемановском лазерном гироскопе (фиг. 2), где показано возникновение модуляции интенсивности AG в одном луче при наложении переменного магнитного поля Н. Из фиг. 2 следует, что зависимость амплитуды модуляции интенсивности ΔG в одном луче от расстройки имеет вид прямой, проходящей через ноль (прямая 1 на фиг. 3). Однако ситуация меняется, если интенсивность излучения G+ в полупериоде, соответствующему положительному полю Н+, отличается от интенсивности G-, соответствующей отрицательному полю Н-. Причиной возникновения разности интенсивностей может быть, например, возникновение анизотропии круговой поляризации встречных волн, либо неравенство коэффициентов рассеяния встречных волн в резонаторе кольцевого лазера. В этом случае зависимость амплитуды модуляции интенсивности ΔG в одном луче от расстройки не проходит через ноль (прямая 2 на фиг. 3). Эта прямая показывает, что нуль разности интенсивности соответствуют расстройке F1 относительно центра линии усиления.
Зависимость частоты выходного сигнала Fo от расстройки периметра ΔF при наличии знакопеременного поля на среде описывается кривой 1 на фиг. 4. При наличии периодического воздействия F2 на длину периметра (кривая 2 на фиг. 4) в выходной частоте наблюдается соответствующее изменение (кривая 3 на фиг. 4). Такое изменение частоты именуется "динамическим дрейфом" лазерного гироскопа. Природа явления подробно рассмотрена, например, в [Яременко, Мельникова. "Влияние нелинейности характеристик активной среды на стабильность выходных сигналов в квантовых приборах с автоматической стабилизацией параметров" Электронная техника. Лазерная техника и оптоэлектроника. Вып 1 (57), 1991].
При совпадении частоты F2 с частотой знакопеременной подставки Fo динамический дрейф будет константой. Величина динамического дрейфа в этом случае описывается соотношением:
ΔW=4/3p*fo*c*ΔU/U*ΔF/Fλ,
где ΔU - амплитуда синхронной составляющей на пьезоприводе, В;
Uλ - межмодовое расстояние, В;
ξo - безразмерная статическая расстройка, ξo=ΔF/Fλ;
ΔF - расстройка относительно центра линии, МГц;
Fλ = 1500 - расстояние между модами одной поляризации, МГц;
с=5 - параметры кривизны контура активной среды;
К - масштабный коэффициент (К=2.75).
Если задаться величинами, реально наблюдаемыми в кольцевом лазере ΔU=10 мВ, Uλ=40В, ΔF/Fλ=0.002 (в единицах межмодового расстояния), то получаем сдвиг нуля, обусловленный динамическим дрейфом ΔW=0.1°/час. Величина ΔU=10 мВ обусловлена наводками на пьезопривод со стороны невзаимного устройства внутри кольцевого лазера. Таким образом, при наличии принципиально неустранимых флуктуаций разности интенсивностей в кольцевом лазере, приводящих к статической расстройке 0.002, для достижения стабильности дрейфа нуля лучше 0.01°/час необходимо обеспечить наличие синхронных составляющих в напряжении на пьезоприводе не более 1 мВ. Чтобы получить меньшие величины синхронной составляющей, необходимо в систему регулировки периметра ввести средства, обеспечивающие минимизацию значения синхронной составляющей в напряжении на пьзоприводе, т.е. средства регулирования по синхронной составляющей.
Для этой цели в системе необходимо измерить синхронную составляющую в напряжении на пьзоприводе, усилить, преобразовать в напряжение синхронное Fo и подать в противофазе на пьезопривод. Такая задача решается введением в систему регулировки периметра измерителя синхронной составляющей ΔUc (второй синхронный детектор 9), интегратора 10 и синхронного модулятора 11.
С выхода синхронного модулятора 11 напряжение, содержащее напряжение на частоте Fo, подается на второй (вычитающий) вход в усилитель 8 и, таким образом, сводит к нулю синхронную составляющую, изначально присутствующую в системе.
Таким образом, благодаря введению дополнительных технических средств, включающих второй синхронный детектор, первый вход которого является входом сигнала знакопеременной подставки, а второй вход соединен с выходом усилителя, интегратор, вход которого соединен с выходом второго синхронного детектора, и синхронный модулятор, первый вход которого является входом сигнала знакопеременной подставки, второй вход соединен с выходом интегратора, а выход соединен со вторым входом усилителя, достигается требуемый технический результат, заключающийся в повышении точности регулировки периметра зеемановского лазерного гироскопа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулировки периметра зеемановского лазерного гироскопа | 2020 |
|
RU2736737C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2020 |
|
RU2744420C1 |
| Система регулировки периметра зеемановского лазерного гироскопа | 2020 |
|
RU2724242C1 |
| Двухрежимный зеемановский лазерный гироскоп | 2020 |
|
RU2740167C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2022 |
|
RU2796228C1 |
| Способ и устройство для выделения информации о вращении в четырехчастотном зеемановском лазерном гироскопе | 2023 |
|
RU2810720C1 |
| Способ определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений | 2020 |
|
RU2735490C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПЕРИМЕТРА РЕЗОНАТОРА ЧЕТЫРЕХЧАСТОТНОГО ЛАЗЕРНОГО ГИРОСКОПА | 2022 |
|
RU2794241C1 |
| Способ стабилизации и регулирования периметра четырехчастотного зеемановского лазерного гироскопа со знакопеременной магнитооптической частотной подставкой в форме меандра | 2023 |
|
RU2805770C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ СО ЗНАКОПЕРЕМЕННОЙ ЧАСТОТНОЙ ПОДСТАВКОЙ | 2013 |
|
RU2531027C1 |
Изобретение относится к гироскопам и измерительной технике и может быть использовано для регулировки периметра зеемановского лазерного гироскопа. Система содержит фотоприемник излучения кольцевого лазера, вход которого является входом излучения кольцевого лазера, оснащенного пьезоприводом и содержащего блок частотной подставки, вход которого является входом сигнала знакопеременной подставки, а выход соединен с невзаимным устройством кольцевого лазера, включенным в его резонатор. Первый синхронный детектор, первый вход которого соединен с выходом фотоприемника излучения кольцевого лазера, а второй вход является входом сигнала знакопеременной подставки, интегратор со сбросом, вход которого соединен с выходом первого синхронного детектора. Усилитель, первый вход которого соединен с выходом интегратора со сбросом, а выход соединен с пьезоприводом кольцевого лазера, второй синхронный детектор, первый вход которого является входом сигнала знакопеременной подставки, а второй вход соединен с выходом усилителя, интегратор, вход которого соединен с выходом второго синхронного детектора. Синхронный модулятор, первый вход которого является входом сигнала знакопеременной подставки, второй вход соединен с выходом интегратора, а выход соединен со вторым входом усилителя. Технический результат заключается в повышении точности регулировки. 4 ил.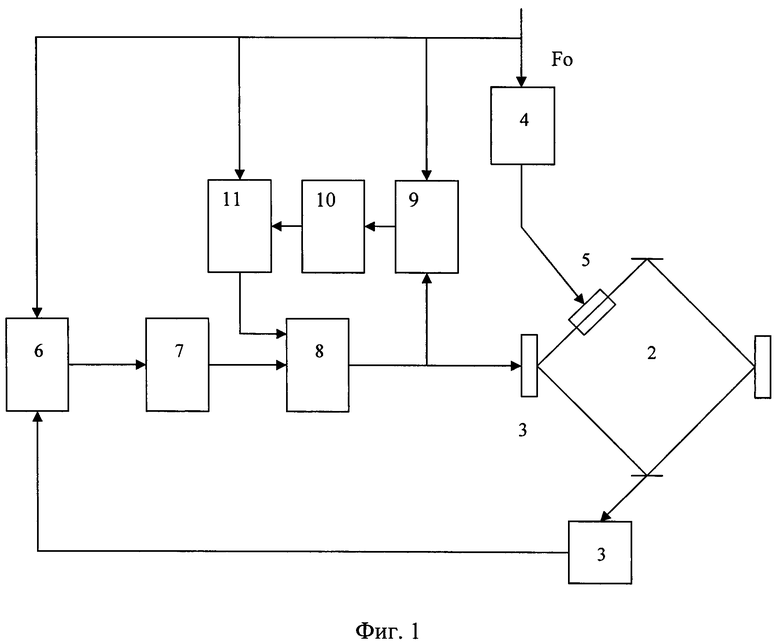
Система регулировки периметра зеемановского лазерного гироскопа, включающая фотоприемник излучения кольцевого лазера, вход которого является входом излучения кольцевого лазера, оснащенного пьезоприводом и содержащего блок частотной подставки, вход которого является входом сигнала знакопеременной подставки, а выход соединен с невзаимным устройством кольцевого лазера, включенным в его резонатор, первый синхронный детектор, первый вход которого соединен с выходом фотоприемника излучения кольцевого лазера, а второй вход является входом сигнала знакопеременной подставки, интегратор со сбросом, вход которого соединен с выходом первого синхронного детектора, и усилитель, первый вход которого соединен с выходом интегратора со сбросом, а выход соединен с пьезоприводом кольцевого лазера, отличающаяся тем, что введены второй синхронный детектор, первый вход которого является входом сигнала знакопеременной подставки, а второй вход соединен с выходом усилителя, интегратор, вход которого соединен с выходом второго синхронного детектора, и синхронный модулятор, первый вход которого является входом сигнала знакопеременной подставки, второй вход соединен с выходом интегратора, а выход соединен со вторым входом усилителя.
| Прибор для определения влажности карамельной массы | 1960 |
|
SU136586A1 |
| СХЕМА ДЛЯ ИЗМЕРЕНИЯ РАЗНОСТИ ГРУППОВОГО ВРЕМЕНИ ЗАПАЗДЫВАНИЯ (ВАРИАНТЫ) | 2004 |
|
RU2270454C2 |
| ЛАЗЕРНЫЙ ГИРОСКОП | 2008 |
|
RU2364837C1 |
| US 5311280 A, 10.05.1994 | |||
| US 4969726 A, 13.11.1990. | |||

