Изобретение относится к тяговым электропередачам переменного тока и может быть использовано на автономных мобильных объектах с первичным тепловым двигателем.
Способы регулирования скорости вращения асинхронных электродвигателей с короткозамкнутым ротором (АД) известны, и описаны, например, в книге А.А. Войтеха и др. «Асинхронные электродвигатели с регулированием скорости», Техника, Киев, 1973, 172 с, ил. Особый интерес представляет регулирование скорости с помощью асинхронного двигателя, представляющего собой фактически два АД, роторы которых связаны между собой электрически и механически. Изменением напряжения по амплитуде или фазе на одном из статоров, добиваются регулирования скорости. Регулирование напряжения может быть произведено или при помощи тиристорного регулятора - или при помощи привода поворота статора одного из двигателей. Каскадные соединения двух АД с фазным ротором описаны также в книге А.А Танатара «Методы регулирования скорости асинхронных двигателей» - Киев, Техника, 1968, 158 с., ил.
Использование статистического регулятора напряжения, также, как и введение привода поворота статора усложняет систему, делает ее малонадежной и дорогой. Кроме того, при конструировании мотор-колес, размещение привода поворота статора практически невозможно из-за габаритных и весовых ограничений.
Известно также, а.с. СССР №153751 - электропривод с приводным двигателем переменного тока двойного питания / (Э.В. Утеуги, З.В, Утеуги, опуб. Б.И., 1963, №7, М.кл. H02K 17/24; Н.кл. 212, 26. Этот электропривод содержит двигатель двойного питания, цепь ротора которого подключена к обмотке ротора индукционного генератора, вал индукционного генератора механически соединен с валом приводного двигателя при помощи муфты скольжения.
Имеется также а.с. СССР №168782 - Способ управления двухдвигательным асинхронным каскадным электроприводом / С.З. Барский, опубл. Б.И., 1965, №5, с. 46, М. кл. Н02ρ 7/78, Н.кл. 21 2, 27. Этот способ, применяющийся для двухдвигательного каскадного асинхронного электропривода с жестким соединением валов, а обмотки роторов АД при помощи мостовых выпрямителей подсоединены к цепи постоянного тока машинного преобразователи частоты, отличается тем, что обмотки статоров двигателей при пониженных скоростях включают в треугольник, а при повышенных - в звезду.
Недостатком данных электроприводов является ступенчатое регулирование скорости что ухудшает использование сцепного веса автономного агрегата Наиболее близким по технической сущности является устройство по а.е. СССР №155540 - Бесконтактный регулируемый агрегат, Е.Л. Эттингер, Е.М. Глух, опубл. Б.И, 1963, №13, с. 25, М. кл. Н02р 7/76, Н.кл. 21 2, 26.
Бесконтактный агрегат состоит из двух АД без скользящих контактов с жестким соединением валов, при этом питания обмоток статоров одной машины осуществлено от сети, а второй от преобразователя частоты, причем фазные обмотки роторов соединены между собой последовательно.
Основные недостатки этого агрегата:
1. В состав агрегата входит дополнительный преобразователь частоты ПЧ - см. а.с.№155540.Этот преобразователь может быть электромашинный, ионный, полупроводниковый. Его наличие значительно усложняет привод.
2. Данная агрегат - это двухдвигательный привод, поскольку один АД подключен к сети с постоянной частотой, на статор второго подается изменяемая частота, в роторной цепи - некоторая сумма гармоник, общий момент определяется разностью моментов 1 и 2 АД. Это ухудшает энергетические характеристики привода, усложнить привод, снижает его надежность.
Изобретение направлено на упрощение и повышение надежности электропривода.
Это достигается тем, что привод снабжен дополнительным синхронным генератором, соединенным с валом первичного двигателя,
блоком управления возбуждением, подключенным к обмотке возбуждения дополнительного генератора, обмотка статора дополнительного генератора подсоединена к статору второго асинхронного двигателя.
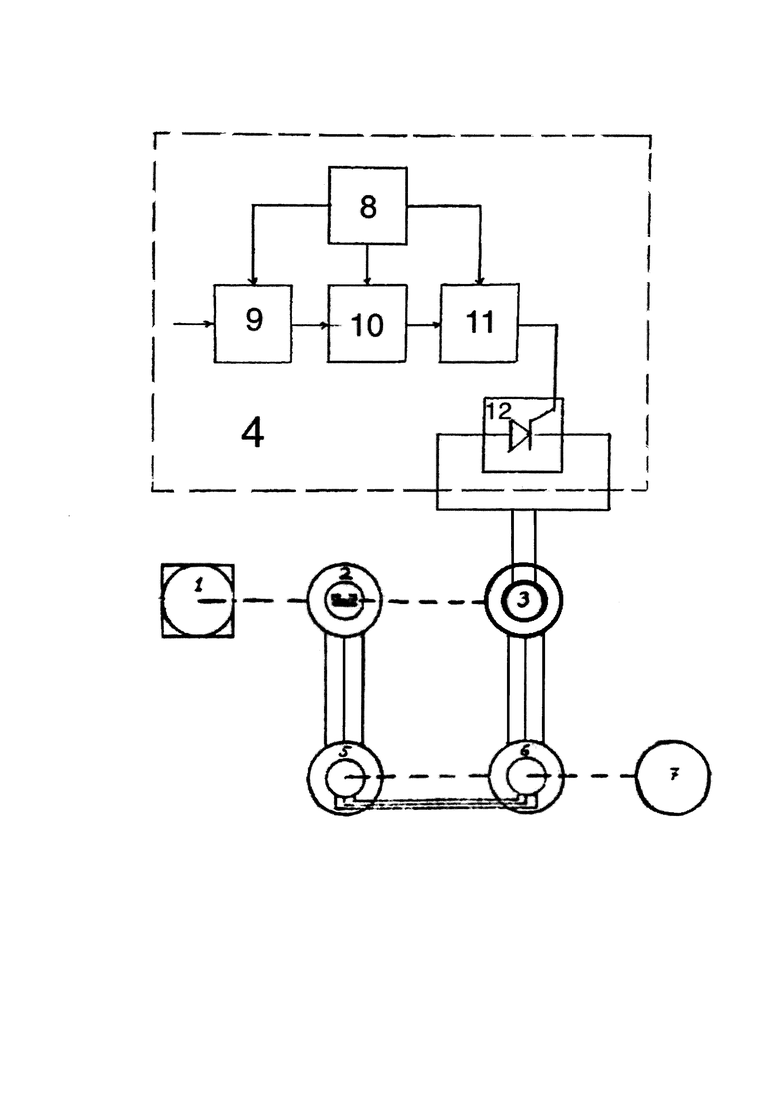
Сущность изобретения иллюстрируется чертежом, где показана схема электропривода.
Электропривод включает в себя первичный двигатель 1, на одном валу с которым сидит основной 2 и дополнительный 3 генераторы. Обмотка возбуждения дополнительного генератора соединена с блоком управления возбуждением 4. Этот блок представляет собой в простейшем случае источник питания с регулировочным реостатом, или иной регулируемый источник постоянного напряжения. Статорные обмотки генераторов присоединены к статорам двух асинхронных короткозамкнутых двигателей 5 и 6, роторы которых соединены электрически и сидят на одном валу с рабочим механизмом 7. Блок 4 состоит из источника питания 8, задатчика 9, усилителя 10, системы импульсно-фазового управления 11, силового блока 12.
Работа привода. Поясним физическую суть процессов, происходящих при регулировании, пуске, торможении привода.
Пуск. Напряжение на выходе блока 4, т.е. на зажимах обмотки возбуждения (ОВ) синхронного регулируемого генератора (СРГ) 3 равно нулю. Энергия двигателя 1 передается синхронному нерегулируемому генератору (СНГ) 2, далее на АД5 (см.чертеж к заявке). Происходит трогание с места при максимальном моменте, близком к критическому и минимальной скорости. Наклон рабочей ветви характеристики АД5 определяется тем, что в его роторную цепь фактически включено сопротивление, состоящее из ротора АД6, индуктивно связанного со статором АД6, статором СРГ 3. Энергия скольжения проходит по тракту: ротор АД5, ротор АД6, статор АД5, статор СРГЗ и возвращается на вал двигателя 1 и СНГ2.
Регулирования. Увеличивают напряжение на выходе блока 4, т.е. на роторе СРГЗ. Тем самым, на его статорных зажимах появляется некоторая ЭДС, направленная встречно ЭДС, наведенной током в роторах АД5 и АД6, поэтому ток в цепи роторов АД5 и АД6 уменьшается, это эквивалентно введению в роторную цепь АД5 дополнительной ЭДС с частотой сети (оба генератора СРГЗ и СНГ2 находятся на одном валу). Происходит уменьшение наклона рабочей ветви АД5, при том же моменте скорость увеличивается. Ее значение обусловлено величиной дополнительной ЭДС определяемой величиной напряжения на выходе блока 4.
Торможение. При номинальной скорости и номинальном моменте уменьшается напряжение блока 4, величина противо-Э.Д.С, вводимой трактом: СРГ3-АД6 уменьшается, наклон статической характеристики АД5 увеличивается, что, при постоянном моменте приводит к уменьшению скорости. Энергия торможения тратится в цепи потерь тракта СРГ3-АД6 и частично передается на общий вал СРГ3-СНГ2. При достижении валом АД скорости, соответствующей напряжению на роторе СРГЗ, наступает равновесие между Э.Д.С. скольжения, индуктированной СРГЗ. Оно может быть нарушено новым изменением напряжения на статоре СРГЗ.
Таким образом, регулируя напряжение на выходе блока 4, можно получить семейство механических характеристик АД 5 с различными наклонами, обусловленными дополнительно вводимой с помощью АД 5 и СРГЗ Э.Д.С. При постоянном моменте это позволяет регулировать скорость на валу АД 5.
Трогание с места (запуск двигателей) происходит при минимальном напряжении возбуждения на дополнительном генераторе. Таким образом, пуск происходит при одном задействованном АД. Второй АД, соединенный с дополнительным генератором работает как вращающийся преобразователь частоты тока ротора (пропорциональной скольжению) в частоту сети. При этом мощность в роторной цепи первого АД не выделяется бесполезно в виде тепла, а передается через статор второго АД в статор дополнительного генератора и далее на вал первого генератора. По мере разгона привода, возбуждение на дополнительном генераторе увеличивают. При этом напряжение на статоре второго АД растет и при полностью введенном возбуждении оба АД работают на один овал с подсинхронной номинальной скоростью. При необходимости снизить скорость, напряжение возбуждения уменьшают. Процесс регулирования проходит в обратном порядке. Таким образом, при помощи второго АД и дополнительного генератора в цепь ротора первого АД вводится добавочная Э.Д.С, частота которой равна частоте Э.Д.С, наводимой в роторе. Регулируя величину этой Э.Д.С, можно регулировать скорость привода.
Блок 4- это обычный тиристорный регулятор напряжения.
Напряжение с задатчика 9 поступает на усилитель 10, далее на систему импульсно-фазового управления 11 и на силовой блок 12. Питание осуществляется от блока 8. В простейшем случае в качестве регулятора может быть использован обычный реостат.
Применение заявленного агрегата дает возможность отказаться от статических преобразователей частоты, отличающихся невысокой надежностью и большой стоимостью. Применение АД, имеющих предельную простоту конструкции, отсутствие скользящего контакта, делают работу привода еще более надежным. За счет отсутствия преобразователя частоты стоимость привода по сравнению с прототипом снижается примерно на 20%.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИСПЫТАНИЙ ЧАСТОТНО-УПРАВЛЯЕМОГО ГРЕБНОГО ЭЛЕКТРОПРИВОДА СИСТЕМЫ ЭЛЕКТРОДВИЖЕНИЯ В УСЛОВИЯХ СТЕНДА | 2011 |
|
RU2462728C1 |
| БЕСКОНТАКТНЫЙ РЕГУЛ МРУЕЛ\ЫЙ ЭЛЕКТРОПРИВОД | 1971 |
|
SU420069A1 |
| РУССКИЙ АВТОМАТИЗИРОВАННЫЙ ПАРАМЕТРИЧЕСКИЙ ЭЛЕКТРОПРИВОД ЯЛОВЕГИ | 2004 |
|
RU2262791C1 |
| Автоматическая микропроцессорная система регулирования температуры энергетической установки транспортного средства | 2016 |
|
RU2645519C1 |
| Ветроэнергетическая установка | 2016 |
|
RU2615564C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА НА ПЕРЕМЕННОМ ТОКЕ | 2012 |
|
RU2509002C2 |
| Электрическая передача переменного тока тягового транспортного средства с микропроцессорной системой управления | 2019 |
|
RU2729767C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА НА ПЕРЕМЕННОМ ТОКЕ | 2014 |
|
RU2572023C2 |
| Одноименнополюсный одномашинный преобразователь частоты | 1957 |
|
SU110273A1 |
| МАШИННО-ВЕНТИЛЬНЫЙ КАСКАД | 1971 |
|
SU312343A1 |
Изобретение относится к электрическим тяговым системам транспортных средств. Тяговый электропривод содержит первичный автономный двигатель с синхронным генератором, статор которого соединен со статором первого асинхронного короткозамкнутого двигателя, второй асинхронный короткозамкнутый двигатель, ротор которого соединен механически и электрически с ротором первого двигателя. При этом привод дополнительно содержит синхронный генератор, соединенный с валом первичного двигателя, блок управления возбуждением, подключенный к обмотке возбуждения дополнительного генератора. Обмотка статора дополнительного генератора подсоединена к статору второго синхронного двигателя. Технический результат заключается в упрощении и повышении надежности электропривода. 1 ил.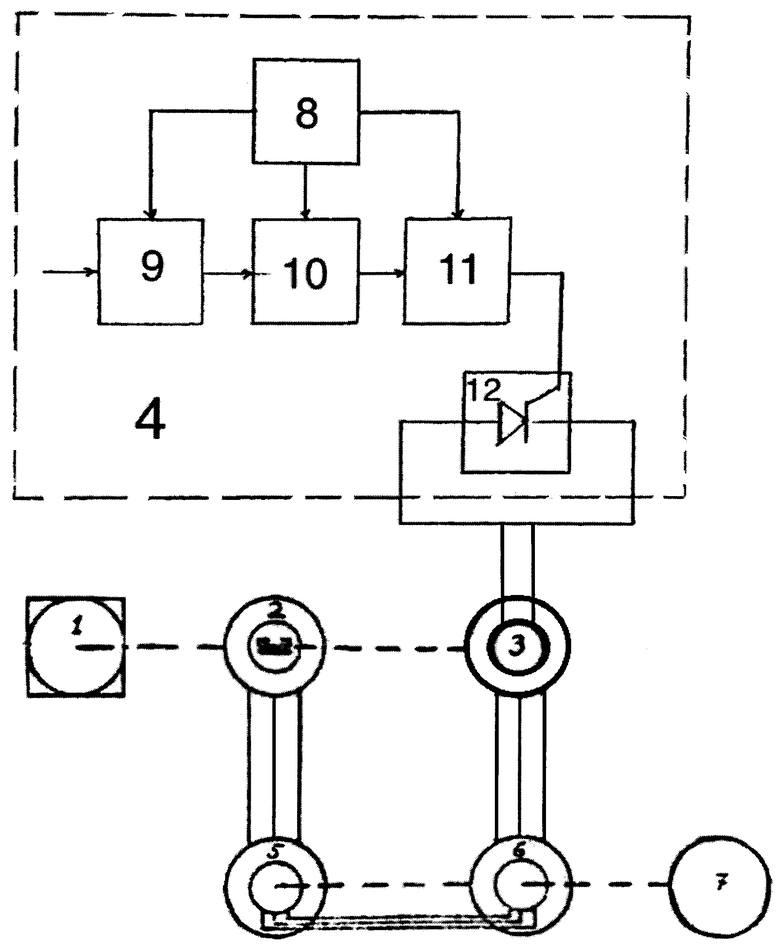
Тяговый электропривод, содержащий первичный автономный двигатель с синхронным генератором, статор которого соединен со статором первого асинхронного короткозамкнутого двигателя, второй асинхронный короткозамкнутый двигатель, ротор которого соединен механически и электрически с ротором первого двигателя, отличающийся тем, что привод снабжен дополнительным синхронным генератором, соединенным с валом первичного двигателя, блоком управления возбуждением, подключенным к обмотке возбуждения дополнительного генератора, обмотка статора дополнительного генератора подсоединена к статору второго асинхронного двигателя.
| 0 |
|
SU155540A1 | |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2247039C2 |
| Автоматическая микропроцессорная система регулирования температуры энергетической установки транспортного средства | 2016 |
|
RU2645519C1 |
| JP 3434602 B2, 11.08.2003. | |||

