Изобретение относится к электроприводам, а точнее к параметрическим электроприводам, частота вращения вала которых регулируется по напряжению, и к дизель-генераторным регулируемым приводам.
Предлагаемый автоматизированный параметрический электропривод может быть использован в качестве привода для роторного бурения, для измерения расхода жидкости в трубопроводах большого диаметра, для регулирования подачи насосов в магистральных трубопроводах нефти и воды и в качестве приводов различного назначения, где требуется обеспечить большую глубину регулирования при высоком пусковом моменте.
Широко известны дизель-генераторные электроприводы с исполнительными (тяговыми) электродвигателями постоянного тока на скоростных железнодорожных локомотивах, большегрузных самосвалах и других транспортных средствах (см. учебное пособие «Электрические машины», ч.2, авторы Д.Э.Брускин, А.Е.Зорохович, В.С.Хвостов, М., «Высшая школа», 1987 г. стр.293).
Дизель-генераторные электроприводы содержат первичный двигатель, как правило дизель, сопряженный с синхронным генератором переменного тока, полупроводниковый выпрямитель, исполнительный «компаундсериес», тяговый электродвигатель постоянного тока или блок коммутации, если от одного генератора питание подключается к нескольким исполнительным двигателям.
Для этих приводов в процессе эксплуатации, особенно в тяжелых климатических условиях Приполярья проблему составляет щеточно-коллекторный узел, при переохлаждении щетки крошится, выходя из строя, а при перегреве распухают и застревают в ярме.
На транспорте при высоких линейных скоростях между коллектором и щеткой возникает «круговой огонь» даже для платино-угольных щеток.
Шины большого поперечного сечения в статоре являются причиной перегрева исполнительного двигателя и низкого КПД, особенно в процессе трогания транспортного средства и движения с малыми скоростями.
Пожаробезопасность двигателей постоянного тока достигается сложными защитными конструкциями, что существенно повышает удельную массу звеньев, сопряженных с первичным двигателем.
Энергетический КПД звеньев, сопряженных с первичным двигателем, находится в пределах 15-20%.
Диапазон регулирования частоты вращения вала электродвигателя составляет 1:5. Более низкая частота вращения не допускается «круговым огнем» коллектора. На низких оборотах у тягового двигателя мал вращающий момент и тяговая сила.
Наиболее близким по технической сущности и достигаемому техническому результату является автоматизированный параметрический электропривод, разработанный «ВНИИЭлектропривод» и Московским опытным заводом «Агрегат» (см. технический паспорт на Комплектный параметрический электропривод типа КПЭ-5.5-850-1Р44УХЛЗ ИЖТП.654223.003-12ПС, 1988 г.).
Комплектный автоматизированный параметрический электропривод содержит исполнительный электродвигатель переменного тока с короткозамкнутым ротором и статором, обмотки которого имеют три вывода для подключения к трехфазному источнику питания.
Вал исполнительного электродвигателя механически связан с валом рабочей машины, имеющей магистрали рабочего тела.
Автоматизированный параметрический электропривод выполнен на базе тиристорных устройств управления и асинхронного двигателя с параметрическим управлением (КПЭ) в виде трехфазного асинхронного электродвигателя, ротор которого выполнен в виде «каленой трубы» с высоким омическим сопротивлением или шихтованным с шинами с высоким омическим сопротивлением. Электродвигатель снабжен дополнительно независимым вентилятором для охлаждения его от чрезмерного перегрева.
Например, двигатель КПЭ-5,5, мощностью 5,5 кВт имеет привод вентилятора принудительного охлаждения, мощностью 0,25 кВт. Технические характеристики, содержащиеся в паспорте КПЭ, приводятся в таблице 1.
КПД двигателей в процессе регулирования не превышает 8%, а ток холостого хода 24 А, что при пуске достигает 168 А.
Масса электродвигателя, как видно из таблицы 1, равна 160 кг.
Основные технические данные комплектных параметрических электроприводов
cos ϕН
cos ϕH
Для всех приводов ошибка по управляющему и возмущающему воздействию не более 10%, максимальная величина перерегулирования не более 20%.
Наиболее существенными недостатками известного привода являются низкие энергетические показатели (КПД, cos ϕ) и интенсивный нагрев исполнительного электродвигателя.
Наличие мощного привода вентилятора принудительного охлаждения в качестве дополнительных обязательных систем защиты от перегрева, имеющих большие массы и габариты, увеличивает габаритно-весовые характеристики, усложняет систему охлаждения и конструкцию в целом.
Использование тиристорных устройств типа ТСУ отрицательно сказывается на надежности.
Не менее существенным недостатком известного электропривода является ограниченность диапазона регулирования частоты вращения вала исполнительного электродвигателя, особенно на низких оборотах. Это ограничение вызвано возможным «опрокидыванием» асинхронного двигателя в связи с резким падением момента на его валу и значительным ростом тока в обмотках статора, что может привести к возгоранию, если не сработает защита.
В основу изобретения положена задача создания автоматизированного параметрического электропривода с усовершенствованной механической характеристикой исполнительного электродвигателя за счет устранения зоны неустойчивой работы и увеличения пускового момента на его валу, что позволяет в режиме нагрузок, резко отличающихся от номинальных (разгоны, торможения, работа на пониженных оборотах, реверсирование), и при падении напряжения питания на исполнительном электродвигателе более чем на 30% от номинального обеспечить широкий диапазон регулирования частоты вращения вала (от 0 об/мин до синхронной частоты) при сохранении высокого энергетического КПД, обеспечение любой мощности привода, вплоть до МВт, и высоких энергосберегающих свойств.
Это достигается тем, что в электроприводе, названном автоматизированный параметрический электропривод Яловеги (РПЭЯ), содержащем по меньшей мере один исполнительный электродвигатель переменного тока с короткозамкнутым ротором и статором, обмотки которого имеют три вывода для подключения к трехфазному источнику питания, при этом вал исполнительного электродвигателя механически связан с валом рабочей машины, согласно изобретению, в качестве трехфазного источника питания использован трехфазный генератор, три вывода которого электрически связаны с тремя выводами обмоток исполнительного электродвигателя, вал трехфазного генератора механически связан с валом первичного двигателя, например дизеля или электродвигателя, а обмотки индуктора генератора через автоматизированную систему электрически связаны по меньшей меньшей мере с одним датчиком параметра, установленным на соответствующем объекте регулирования, при этом автоматизированная система содержит выпрямитель, выполненный с возможностью изменения параметров постоянного тока от управляющего сигнала, выход которого подключен к выводам обмоток индуктора, устройство сравнения, формирующее управляющий сигнал, выход которого соединен со входом выпрямителя, а входы - с задатчиком и датчиком регулируемого параметра, который установлен на объекте регулирования.
В качестве исполнительного электродвигателя для минимизации себестоимости и существенного улучшения свойств по сравнению с асинхронным или компаундированным сериесным электродвигателем постоянного тока используется металлоконструкция стандартного трехфазного асинхронного электродвигателя, в статорных пазах которого расположены две независимые обмотки, одна из которых соединена по схеме звезда, другая по схеме треугольник, по известной схеме РПЭЯ (патент USA №5559385 от 24.09.1996 г.).
В качестве источника питания используют стандартный трехфазный синхронный генератор, управляемый автоматизированной системой с полупроводниковым выпрямителем на выходе, который питает (постоянным током) индуктор генератора через контактные кольца. Датчиком регулируемого параметра служит, например, тахогенератор, связанный непосредственно с валом исполнительного электродвигателя.
В качестве первичного двигателя могут быть: регулируемый РПЭЯ, питаемый от трехфазной сети, дизельный двигатель или двигатель иной категории.
Возможны различные варианты выполнения РПЭЯ, например датчик регулируемого параметра может быть установлен на исполнительном двигателе и механически связан с его валом для регистрации частоты вращения.
Кроме того, датчик регулируемого параметра может быть установлен на рабочей машине и механически связан с ее валом. Возможен вариант выполнения, когда вал трехфазного генератора механически связан с валом дизеля, снабженного средством регулирования частоты его вращения, а датчик параметра установлен на исполнительном двигателе и выполнен в виде датчика тока обмоток его статора.
Целесообразно при использовании нескольких исполнительных электродвигателей переменного тока в случае группового привода, например при пуске и частичном отключении в стационарном движении, выводы трехфазного генератора электрически связаны с выводами обмоток электродвигателей через блок коммутации.
Датчик регулируемого параметра может быть установлен на магистрали рабочего тела рабочей машины для контроля таких параметров рабочего тела как, например, давление, температура, вязкость, газонасыщенность.
Технологично валы всех звеньев сочленять между собой посредством шарнирно - сдвоенной муфты, служащей одновременно виброударозащитным устройством.
В дальнейшем изобретение поясняется описанием конкретных примеров выполнения и прилагаемыми чертежами, на которых:
фиг.1 изображает условно функциональную схему автоматизированного параметрического электропривода согласно изобретению, в одном варианте выполнения;
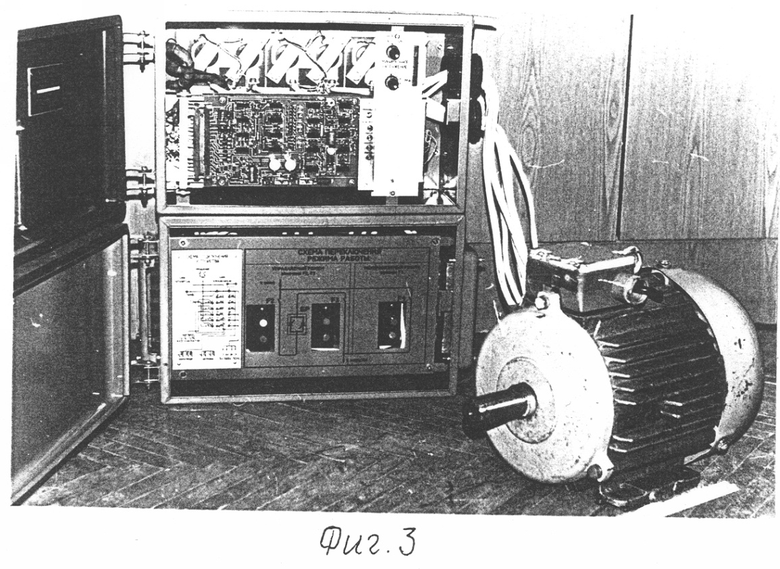
фиг.2 - условно функциональную схему автоматизированного параметрического электропривода согласно изобретению, в другом варианте выполнения;
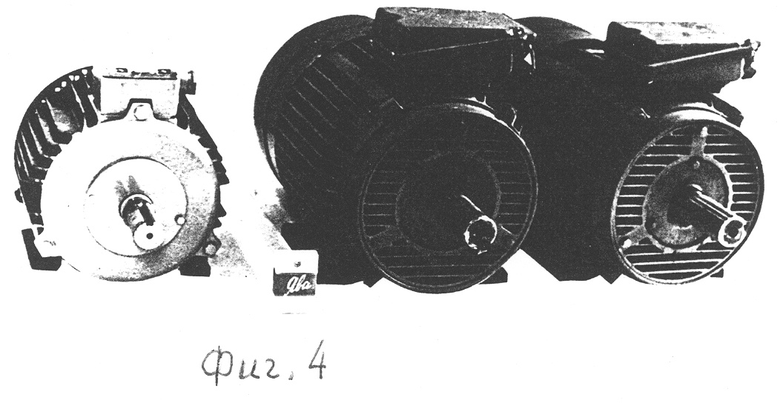
фиг.3 - показан внешний вид предложенного параметрического электродвигателя Яловеги (РПЭЯ) и его габариты по сравнению с известными конструктивными решениями.
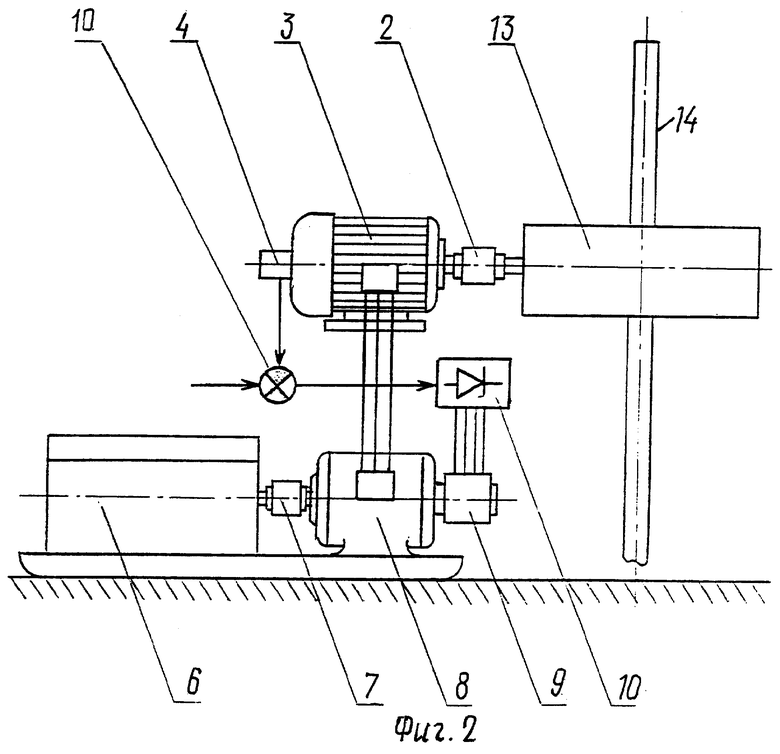
Рассмотрим функциональную схему предложенного электропривода, изображенную на фиг.1, где рабочей машиной служит мощный центробежный насос 1 в составе транспортной магистрали нефти или иной жидкости, соединенный шарнирно-сдвоенной муфтой 2, имеющей двенадцать степеней подвижности, которая служит еще и виброударозащитным звеном (см. патент РФ №2155887). Она предназначена для передачи насосу 1 исполнительным электродвигателем 3 вращающего момента без искажения по форме и времени, нейтрализуя негативные воздействия сопряженных звеньев структурной схемы предлагаемого электропривода.
Вал исполнительного двигателя 3 соединен с тахогенератором 4 (датчиком регулируемого параметра) стандартной конструкции, который подает на устройство сравнения 5 сигнал обратной связи от вращения вала двигателя 3. На устройство сравнения 5 подается также сигнал Y от задатчика.
Электропривод снабжен первичным двигателем 6, вал которого через собственную шарнирно-сдвоенную муфту 7 механически связан с валом трехфазного генератора 8, три вывода которого электрически связаны с тремя выводами обмоток статора исполнительного двигателя 3.
В пазах статора исполнительного электродвигателя 3 переменного тока с короткозамкнутым ротором размещены две независимые трехфазные обмотки, одна из которых соединена по схеме треугольник, а вторая - по схеме звезда. Обмотки снабжены тремя выводами для подключения к трехфазному источнику питания, которым служит трехфазный генератор 8, выводы обмоток индуктора 9 которого соединены с выходами выпрямителя 10, выполненного в виде полупроводникового преобразователя тока, на вход которого поступает управляющий сигнал.
Входы устройства 5 сравнения, формирующего управляющий сигнал, соединены с задатчиком и датчиками регулируемого параметра, одним из которых является тахогенератор 4. Другие датчики 11 и 12 могут быть установлены на магистрали рабочего тела, в данном примере на транспортной магистрали жидкости, для контроля параметров этой жидкости, например, давления, температуры, вязкости, газонасыщенности и других параметров.
Кроме того, датчик регулируемого параметра может быть механически связан с валом насоса 1 для регистрации частоты его вращения (не показан).
Использование предлагаемого Автоматизированного Параметрического электропривода Яловеги имеет большое подмножество вариантов. Например, на фиг.2 показан вариант использования привода для роторного бурения, когда в качестве первичного двигателя 6 применен дизельный двигатель, вращающий генератор 8 и связанный с ним защитной муфтой 7. Контактные кольца индуктора 9 соединены, как и в предыдущей схеме фиг.1, с выпрямителем 10 автоматизированной системы управления. Обратная связь формируется с помощью тахогенератора 4, жестко соединенного с валом исполнительного двигателя 3, который приводит в действие стол 13, сквозь который проходит прямоугольная буровая штанга 14.
Эта система имеет высокий КПД по энергоносителю и обладает полной автономией энергоснабжения.
Кроме того, с помощью регулирования дизельного двигателя можно использовать частотный метод регулирования исполнительного электродвигателя.
При этом дизель снабжен средством регулирования частоты вращения вала, а датчик параметра установлен на исполнительном двигателе и выполнен в виде датчика тока обмоток его статора.
Автоматизированный Параметрический электропривод Яловеги функционирует следующим образом.
Первичный двигатель 6, например РПЭЯ, задает частоту вращения вала генератора 8, например 50 Гц. Задающий сигнал Y и сигнал от тахогенератора 4 в устройстве 5 формируют сигнал воздействия на усилитель полупроводникового преобразователя-выпрямителя 10, который формирует линейное напряжение постоянного тока в трех фазах синхронного генератора 8. Напряжение, приложенное к вводам обмоток исполнительного электродвигателя 3, определяет частоту вращения вала и колеса центробежного насоса 1. Управляющее воздействие устройства 5 сравнения от задатчика задает частоту вращения колеса насоса 1, начиная с наименьшего значения, например с двух оборотов в минуту. Плавно, в течение заданного интервала времени переходного процесса, например 10-20 мин, исполнительный электродвигатель 3 допускает любую заданную частоту вращения вала предельной и жестко регулируемой. Пятикратная перегрузка на валу РПЭЯ не изменяет заданную частоту вращения вала. РПЭЯ регулируется и по частоте тока. С помощью первичного двигателя 6 можно задать частоту тока генератора 8, в принципе 50-55-60-65 Гц, если позволяет механическая прочность насоса 1 и других вращающихся валов и их агрегатов.
Автоматизированный электропривод имеет большую глубину регулирования, имеет большой пусковой момент, поэтому является еще и энергосберегающей системой. Об этом свидетельствует большой энергетический КПД в процессе регулирования частоты вращения вала исполнительного электродвигателя. Энергетический КПД привода без учета объекта управления - центробежного насоса или иной категории нагрузки, в номинальном режиме равен 0,85. В примере использован РПЭЯ, полученный из асинхронного электродвигателя А4-400Х-4УЗ, мощностью 500 кВт, модернизированного по схеме РПЭЯ. В результате замены только обмотки статора повышена мощность на 30%, расход электротехнической стали снижен на 250 кг. Пусковой момент повышен в 4 раза. Следовательно, в процессе проектирования нет надобности завышать мощность двигателя в 2,5-3 раза, снижая КПД в 3 раза от максимального паспортного.
В изобретении предлагается использование защитной муфты ШСМ (патент РФ №2155887 от 10.09.2000 г.), продлевающей срок службы механизмов и машин вдвое.
Предложенный электропривод имеет диапазон регулирования частоты вращения вала от 0 об/мин до синхронной частоты, обладает высоким энергетическим КПД, большой мощностью, вплоть до МВт, высоким пусковым моментом, энергосберегающим свойством.
Кроме того, электропривод обладает высокой надежностью, минимальной удельной массой на кВт мощности и низкими эксплуатационными затратами. При технической реализации предложенного РПЭЯ можно использовать металлоконструкцию стандартного трехфазного электродвигателя с короткозамкнутым ротором.
Далее приведен сопоставительный анализ свойств предложенного РПЭЯ по сравнению с известными решениями:
- Регулируется по амплитуде напряжения при неизменной частоте тока, на глубину 1:2900, а известный двигатель постоянного тока, компаундированный сериес: 1:5. К тому же на пониженных оборотах снижает КПД и вращающий момент.
- РПЭЯ имеет благоприятную механическую характеристику: 2/3 верхней части от синхронной скорости - характеристика интегрирующего звена, остальная часть - тяговая с пусковым моментом в 3-4 раз больше, чем у асинхронного двигателя (АД). Испытания показали, что с обратной связью по частоте вращения исполнительного электродвигателя пятикратное изменение нагрузки не изменили заданного значения числа оборотов ни на одну единицу. Компаундированный сериесный тяговый электродвигатель вообще не допускает обратную связь.
- Предлагаемый параметрический электропривод в 5 и более раз эффективнее асинхронного нерегулируемого электропривода или тягового с компаундированным сериесным электродвигателем постоянного тока использует электрическую энергию от сети на длительном интервале времени (60 суток). Неоднократно проверялось путем прямых измерений.
- Пусковой ток у РПЭЯ в 2,5 раза меньше, чем у асинхронного, и значительно меньше, чем у компаундированного сериесного. Благодаря этому свойству надежность в процессе эксплуатации у РПЭЯ на порядок выше, чем у любого иного электродвигателя.
- Соединение валов звеньев у предлагаемого электропривода производится с помощью специальной муфты ШСМ (патент РФ №2155887), которая гасит взаимные толчки и вибрацию, передавая вращающий момент без механических помех. Увеличивает интервал времени между ремонтами.
- В отличие от электроприводов постоянного тока предлагаемый не генерирует мощных помех радиоприему и электронным системам на борту транспортного средства.
- Статор РПЭЯ монтируется более тонкими проводами, чем АД аналогичной мощности, однако пусковой момент имеет не меньше, чем у компаунд-сериесного тягового электродвигателя. В составе обмоток статора нет толстых шин, которые при полной нагрузке снижают энергетический КПД до 15% (Пуск).
- Параметрический электродвигатель Яловеги имеет себестоимость производства в 4-5 раз меньше, чем производство компаунд-сериесного тягового электродвигателя.
- Автоматизированный Параметрический электропривод для скоростного транспорта имеет массу в 5 раз меньше известных электроприводов. Пожаробезопасен и не имеет щеточно-коллекторных проблем в условиях Заполярья. На фиг.3 приведены фотографии двух КПЭ мощностью 5,5 кВт каждый (справа) и один двигатель РПЭ Яловеги (слева), мощностью 18 кВт и КПД 92%. Ниже на фото показана тиристорная система управления типа ТСУ с блоком коммутации.
- С целью минимизации себестоимости и получения существенного улучшения свойств исполнительного двигателя по сравнению с асинхронным или компаундированным сериесным электродвигателем постоянного тока используется полностью металлоконструкция асинхронного, трехфазного с короткозамкнутым ротором электродвигателя (АД).
Простейшая модернизация производится путем замены традиционной трехфазной обмотки статора на шестифазную обмотку РПЭЯ, включаемую в стандартную трехфазную сеть. Несколько более сложная модернизация предполагает формирование новой конструкции ротора, которая даст прибавку мощности 75%. Разработка РПЭЯ полностью по полной программе новой теории позволяет удвоить мощность без перегрева электродвигателя.
В таблице 2 показаны свойства АД мощностью 500 кВт, приобретенные им после простейшей модернизации по схеме РПЭЯ.
Предлагаемый Русский Автоматизированный Параметрический привод Яловеги преимущественно может быть применен в качестве привода для роторного бурения, для измерения расхода жидкости в трубопроводах большого диаметра (2 м и более), регулирования подачи насосов, например, в магистральных трубопроводах нефти и воды.
Тарирование крупного центробежного насоса с таким приводом можно производить на воде в лабораторных условиях до постановки в магистраль. Измерение расхода воды или особенно нефти в больших магистральных трубопроводах ранее известными методами индикации ведется с большой погрешностью, 10% и более.
Предлагаемый привод позволяет тарировать расход по частоте вращения вала с точностью до 1%. Кроме того, дозирование расхода нефти может быть произведено в пределах от 0 до максимального значения подачи насоса в любой точке.
Привод является универсальным и может найти применение в качестве приводов различного назначения, где требуется обеспечить большую глубину регулирования при высоком пусковом моменте.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЖНОЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2001 |
|
RU2206950C2 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ СИСТЕМА МОРСКОЙ БУРОВОЙ ПЛАТФОРМЫ | 2017 |
|
RU2652286C1 |
| СИСТЕМА ЭЛЕКТРОДВИЖЕНИЯ | 2004 |
|
RU2278463C1 |
| ПОГРУЖНОЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 1998 |
|
RU2122653C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОХЛАЖДАЮЩЕЙ СРЕДЫ ТЕПЛОВОЙ МАШИНЫ | 2003 |
|
RU2264544C2 |
| ПОГРУЖНОЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ | 2004 |
|
RU2262007C1 |
| Электропривод переменного тока | 1985 |
|
SU1272463A1 |
| Автоматическая микропроцессорная система регулирования температуры энергетической установки транспортного средства | 2016 |
|
RU2645519C1 |
| Электропривод переменного тока | 1986 |
|
SU1431027A1 |
Изобретение относится к области электротехники и может быть использовано в приводах для роторного бурения, для измерения расхода жидкости в трубопроводах большого диаметра, для регулирования подачи насосов в магистральных трубопроводах. Сущность изобретения состоит в следующем: энергосберегающий электропривод Яловеги содержит, по меньшей мере, один исполнительный электродвигатель переменного тока с короткозамкнутым ротором, содержащий две независимые обмотки, одна из которых соединена по схеме треугольник, а вторая - по схеме звезда, а также трехфазный генератор в качестве трехфазного источника питания, связанный с первичным двигателем, в частности дизелем или электродвигателем, и автоматизированную систему, содержащую выпрямитель, выполненный с возможностью изменения параметров постоянного тока от управляющего сигнала, выход которого подключен к выводам обмоток индуктора трехфазного генератора, и устройство сравнения, формирующее управляющий сигнал, выход которого соединен со входом выпрямителя, а входы - с задатчиком и датчиком регулируемого параметра, установленным на объекте регулирования, например на валу электропривода. Технический результат, на достижение которого направлено данное изобретение, состоит в повышении КПД, улучшении механической характеристики электропривода путем устранения зоны его неустойчивой работы и увеличения пускового момента на валу, а также в обеспечении широкого диапазона регулирования частоты вращения вала, высокой надежности, снижении массы и эксплуатационных затрат. 6 з.п. ф-лы, 4 ил., 2 табл.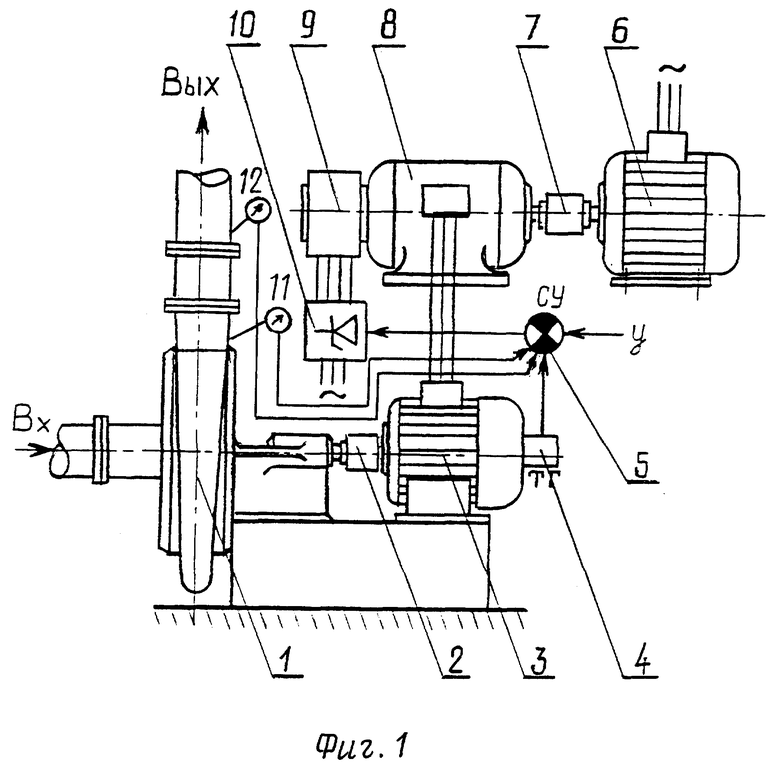
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для непрерывного лова водных организмов | 1976 |
|
SU654223A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПУСКОМ РЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА С АВТОНОМНЫМ ИСТОЧНИКОМ ЭЛЕКТРОПИТАНИЯ | 1992 |
|
RU2080736C1 |
| Электропривод с автономным источником | 1985 |
|
SU1341710A1 |
| Электрическая тяговая система транспортного средства | 1989 |
|
SU1677777A1 |
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1992 |
|
RU2065660C1 |
| ШАРНИРНО-СДВОЕННАЯ МУФТА | 2000 |
|
RU2155887C1 |
| US 5559385 А, 04.12.1984 | |||
| БРУСКИН Д.Э | |||
| и др | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М.: Высшая школа, 1987, с.293. | |||

