Известен ряд машин как зарубежного, так и российского производства для проверки эксплуатационных характеристик антисейсмических гидроамортизаторов атомных реакторов. Их достоинства и недостатки перечислены в описании к изобретению «Машина испытательная гидравлическая», патент №2535531, которая является ближайшим прототипом заявляемой машины и может быть принята за аналог.
К недостаткам конструкции аналога можно отнести:
1. Малая гидравлическая жесткость основного силового гидроцилиндра, не позволяющая проводить исследования гидроамортизаторов (ГА) к восприятию динамических нагрузок с высокой частотой нагружения.
2. В режиме проверки силы сопротивления, создаваемой ГА на холостом ходу, смещение штока ГА из одного положения в другое с малой скоростью осуществляется с помощью малого гидроцилиндра при запертых гидрозамками полостях основного силового гидроцилиндра. Такая схема обуславливает величину хода малого цилиндра не менее хода штока исследуемого ГА и наличие в схеме двух гидрозамков.
3. Конструктивно сложная и неудобная в работе муфта включения и выключения из силовой цепи основного гидроцилиндра, гидроцилиндра малых сил и датчика силы.
Это вносит дополнительные требования к конструкции и качеству рамы, удорожающие ее изготовление.
Этих недостатков лишена заявляемая машина.
На прилагаемом рисунке (фиг. 1), изображена заявляемая машина, включающая в себя следующие узлы:
- нагружающее устройство, содержащее: основание 1, неподвижную траверсу 2, жестко связанную с основанием колоннами 3, силовой гидроцилиндр 4, работающий на предельной нагрузке, с корпусом 5 и плунжером 6, имеющий рабочие гидравлические уплотненные полости «А» и «В», жестко скрепленный с основанием при помощи резьбового кольца 7, подвижную траверсу 8, сопряженную с колоннами 3 через антифрикационные втулки 9, датчик силы 10, жестко соединенный с траверсой болтами, резьбовой стержень 11, скрепленный с траверсой 8 с помощью резьбы и проходящий внутри плунжера 6, гайки 12 и 13, с помощью которых стержень 11 скрепляется и раскрепляется с плунжером 6, датчик перемещения 14 плунжера 6 относительно корпуса гидроцилиндра 5, направляющую 15, предохраняющую плунжер 6 от проворота относительно корпуса гидроцилиндра 5, датчик перемещения 16 подвижной траверсы 8, захват 17, жестко скрепленный с датчиком силы 10 шпилькой 18, шток 19, подвижно сопряженный в осевом направлении с неподвижной траверсой 2 через гидростатический подшипник 20, скрепленный с траверсой 2 гайкой 21, захват 22, скрепленный со штоком 19 резьбой, поперечину 23, скрепленную с траверсой 2 колонками 24, короткоходовой гидроцилиндр малых сил 25 с плунжером 26, закрепленным в поперечине гайкой 27, датчик малых сил 28, скрепленный со штоком 19 с помощью корпуса 29 и с плунжером 26 шпилькой 30, датчик перемещения 31 плунжера 26 относительно корпуса цилиндра 25, направляющую 32, предохраняющую плунжер 26 от проворота, упорную гайку 33 с рукояткой 34, служащую для включения и выключения из силовой цепи нагружающего устройства гидроцилиндра малых сил 25 и датчика малых сил 28, гайки 35, 36, 37, 38, 39 и 40 для выборки в силовой цепи гидроцилиндра 4 люфта между скрепляемыми деталями при работе машины в циклическом режиме с переходом через ноль, распределительную плиту 41, скрепленную с корпусом 5 гидроцилиндра 4, и исследуемый гидроамортизатор 42, закрепляемый в захватах 17 и 22;
- насосную установку 43 с предохранительным клапаном 44, обеспечивающую функционирование нагружающего устройства;
- сервоклапан 45, обеспечивающий подачу рабочей жидкости в полость «В» силового гидроцилиндра и установленный на распределительной плите 41 силового гидроцилиндра;
- сервоклапан 46, обеспечивающий подачу рабочей жидкости в полости гидроцилиндра малых нагрузок 25;
- систему управления 47, обеспечивающую режимы испытаний ГА и измерение результатов испытаний.
Заявляемая машина работает следующим образом:
Из магистрали высокого давления насосной установки 43 рабочая жидкость подается на вход сервоклапана 45, управляющего гидроцилидром 4, на вход сервоклапана 46, управляющего гидроцилиндром 25, в полость «А» гидроцилиндра 4 и в гидростатический подшипник 20.
В полости «А» гидроцилиндра 4 поддерживается постоянное давление с помощью клапана 44, полость «В», у которой площадь в два раза больше площади полости «А», управляется сервоклапаном 45 по принципу «подача-слив». При равенстве давлений в полостях создается максимальная нагрузка, направленная в одну сторону, при давлении в полости «В», близком к нулю - максимальная нагрузка, направленная в другую сторону.
Продольная гидравлическая жесткость гидроцилиндра 4 регулируется путем смещения плунжера 6 относительно корпуса 5 и достигает максимального значения при минимальном объеме рабочей жидкости в полости «В».
Гидроцилиндр 25 - короткоходовой, двухсторонний, служащий для управления штоком 19 при работе машины в режиме определения сил сопротивления, создаваемых ГА на холостом ходу, а также для поверки датчика малых сил 28.
Гидростатический подшипник 20 служит для снятия сил трения на штоке 19 при передаче силы, прилагаемой гидроцилиндром 4 к ГА и к датчику малых сил 28.
Упорная гайка 33 имеет два положения: крайнее правое, при котором гидроцилиндр 25 и датчик силы 28 выключаются из силовой цепи нагружающего устройства путем фиксации штока 19 между упорными гайками 33 и 39, и крайнее левое, при котором между корпусом гидростатического подшипника 20 и гайкой 33 образуется зазор ~ 4 мм для включения гидроцилиндра 25 и датчика силы 28 в силовую цепь нагружающего устройства. Упорная гайка 33 поворачивается в одну и другую сторону с помощью рукоятки 34.
Работа машины испытательной сервогидравлической для исследования эксплуатационных характеристик антисейсмических гидроамортизаторов атомных реакторов в режиме определения силы сопротивления, создаваемой ГА на холостом ходу при малых скоростях перемещения.
Подготовительные операции:
- гайки 38 и 39 скрепляются между собой и с захватом 22;
- шток 19 смещается гидроцилиндром 25 влево до упора гайки 39 в торец гидростатического подшипника;
- гайка 33 рукояткой 34 поворачивается в крайнее левое положение, в результате между торцом гайки и торцом корпуса гидростатического подшипника образуется зазор ~ 4 мм;
- шток 19 смещается гидроцилиндром 25 вправо на 2 мм, образуя зазор по 2 мм между гайками 33 и 39 и корпусом гидростатического подшипника 20;
- захват 17 устанавливается гидроцилиндром 4, управляемым сервоклапаном 45 по перемещению, в положение, соответствующее расстоянию между крепежными элементами исследуемого ГА. При требуемом смещении захвата 17, большем, чем величина хода плунжера 6, для установки захвата 17 в нужное положение используется возможность плунжера 6 смещаться относительно стержня 11 при отпущенных гайках 12 и 13.
Например, при смещении в сторону увеличения рабочего пространства необходимо проделать следующие операции:
- плунжер 6 после смещения захвата 17 на величину хода находится в крайнем правом положении;
- гайка 12 свинчивается по резьбовому стержню 11 на величину хода плунжера 6;
- плунжер 6 смещается серваклапаном 45 влево упора в гайку 12, при этом стержень 11 остается неподвижным;
- гайка 13 свинчивается по резьбовому стержню 11 до упора в торец плунжера 6;
- плунжер 6 смещается серваклапаном 45 вправо вместе с резьбовым стержнем 11, траверсой 8 и захватом 17 до необходимой величины или до конца хода плунжера 6, после чего операции повторяются до тех пор, пока захват 17 будет установлен в нужное положение.
После установки необходимого пространства исследуемый ГА закрепляется в захватах 17 и 22 при среднем положении поршня ГА;
- плунжер 6 устанавливается сервоклапаном 45 в среднее положение и скрепляется со стержнем 11 гайками 12 и 13.
Работа
Гидроцилиндром 4, управляемым сервоклапаном 45 с обратной связью по датчику перемещения 14, шток ГА перемещается из одного крайнего положения в другое, при этом цилиндр 25, управляемый сервоклапаном 46 с обратной связью по датчику перемещения 31, поддерживает положение захвата 22, сохраняя зазоры между гайками 33 и 39 и корпусом гидростатического подшипника 20 в пределах 2 мм, а датчик силы 28 измерят величину силы сопротивления ГА на холостом ходу.
По завершении исследования цилиндр 25 смещает шток 19 до упора гайки 39 в корпус гидростатического подшипника, и гайка 33, поворотом до упора в корпус гидростатического подшипника, выключает цилиндр 25 и датчик силы 28 из силовой цепи нагружающего устройства.
Работа машины испытательной сервогидравлической для исследования эксплуатационных характеристик антисейсмических гидроамортизаторов атомных реакторов в режиме определения восприятия ГА динамической нагрузки с высокой частотой циклического нагружения.
Подготовительные операции.
- захват 17 устанавливается цилиндром 4 в положение минимального рабочего пространства;
- в захватах 17 и 22 закрепляется контрольный образец, рассчитанный на предельную нагрузку машины;
- цилиндром 4 к образцу прикладывается растягивающая нагрузка, на 10…15% превышающая предельную;
- подтягиваются гайки 35, 36, 37, 38, 39 и 21, выбирая люфт между сопрягаемыми деталями;
- образец разгружается и нагружается сжимающей нагрузкой на такую же величину;
- подтягиваются гайки 40 между основанием 1 и траверсой 2, выбирая люфт между колоннами и основанием 1 и траверсой 2;
- машина разгружается, образец снимается, и устанавливается исследуемый ГА способом, описанным в предыдущем разделе;
- при среднем положении штока ГА, плунжер 6 при отпущенной гайке 12 устанавливается в левое положение на расстоянии не более 5…10 мм от упора в конце хода, обеспечивающее в полости «В» максимальную продольную жесткость и, соответственно, минимальные потери на сжимаемость при высокой частоте циклического нагружения, после чего скрепляется со стержнем 11 гайками 12 и 13;
- гидроцилиндром 4 шток ГА смещается вправо до упора и нагружается растягивающей нагрузкой, на 10…15% превышающей предельную, подтягивается гайка 12, выбирается люфт между плунжером 6 и стержнем 11, после чего шток ГА возвращается в среднее положение.
Работа
- динамическая нагрузка с высокой частотой циклического напряжения задается гидроамортизатору цилиндром 4, при этом датчик силы 10 и датчик перемещения 14 выдают сигналы системе управления для обработки и измерения;
- в режимах статического нагружения заявляемая машина работает при средних положениях штока ГА и плунжера 6.
Сущность изобретения заключается в следующем.
1. У аналога и других известных машин, предназначенных для проверки гидроамортизаторов атомных реакторов, шток исследуемого ГА и плунжер силового гидроцилиндра жестко связны между собой и не могут смещаться один относительно другого в процессе подготовки к исследованию.
Силовой гидроцилиндр у этих машин двухстороннего действия с двумя управляемыми полостями. При такой конструкции гидроцилиндра жесткая связь штока ГА и плунжера силового гидроцилиндра вполне оправдана.
В конструкцию нагружающего устройства заявляемой машины введен резьбовой стержень, помещенный внутри плунжера гидроцилиндра по свободной посадке и одним концом жестко, с помощью резьбы, связанный с подвижной траверсой 8, сочлененной с датчиком силы 10 и активным захватом 17.
Плунжер скрепляется с резьбовым стержнем с помощью двух гаек по торцам плунжера и может смещаться относительно стержня при отпущенных гайках.
У заявляемой машины силовой гидроцилиндр работает по схеме дифференциального: в полости с меньшей площадью поддерживается постоянное давление, а в управляемой полости гидравлическая жесткость регулируется путем изменения объема рабочей жидкости, т.е. при установлении минимального объема потери на сжимаемость рабочей жидкости сводятся к минимуму и появляется возможность определять восприятие ГА динамической нагрузки с высокой частотой циклического нагружения при оптимальном расходе насосной установки, т.е. машина приобретает дополнительную новую функцию.
2. В режиме проверки силы сопротивления, создаваемой ГА на холостом ходу при малых скоростях перемещения, изменена схема работы машины (см. раздел «Работа машины в режиме определения силы сопротивления, создаваемой ГА на холостом ходу при малых скоростях перемещения»), что упростило конструкцию, а именно:
- цилиндр малых сил стал короткоходовым и, соответственно, уменьшились датчик перемещения, направляющая от проворота и шток гидростатического подшипника;
- в схеме машины отсутствуют два управляемых гидрозамка;
- упростилась схема выключения из силовой цепи нагружающего устройства гидроцилиндра и датчика малых сил как конструктивно, так и по удобству в работе.

Изобретение относится к средствам (испытательные машины) и методам исследования эксплуатационных характеристик антисейсмических гидроамортизаторов АЭС, а также может использоваться для механических испытаний образцов материалов на растяжение, сжатие, и мало- и многоцикловую усталость с переходом через ноль. Машина содержит нагружающее устройство, содержащее основание, неподвижную траверсу, жестко связанные между собой колоннами, поперечину, жестко связанную с неподвижной траверсой колонками, гидроцилиндр на предельную нагрузку, установленный в основании и жестко с ним скрепленный, подвижную траверсу, сопряженную с колоннами через антифрикционные втулки и жестко скрепленную с плунжером гидроцилиндра на предельную нагрузку, один из двух захватов для закрепления исследуемых гидроамортизаторов, скрепленный с подвижной траверсой через датчик силы, гидроцилиндр малых сил, установленный в поперечине и жестко с ней скрепленный и своим плунжером через датчик малых сил, соединенный с установленным в неподвижной траверсе на гидростатическом подшипнике штоком со вторым захватом, датчики перемещения. Машина также содержит насосную установку, систему управления, измерения и обработки результатов исследования. У гидроцилиндра на предельную нагрузку площади рабочих полостей отличаются в два раза: управляемой является полость с большей площадью, а в полости с меньшей площадью поддерживается с помощью насосной установки постоянное давление. В конструкцию машины введен резьбовой стержень, помещенный внутри плунжера гидроцилиндра на предельную нагрузку по свободной посадке, одним концом жестко скрепленный с подвижной траверсой, и скрепляемый и раскрепляемый при помощи двух гаек с плунжером, имеющим возможность продольного смещения относительно резьбового стержня. Технический результат: возможность определять восприятие гидроамортизаторами динамической нагрузки с высокой частотой циклического нагружения при оптимальном расходе насосной установки. 1 з.п. ф-лы, 1 ил.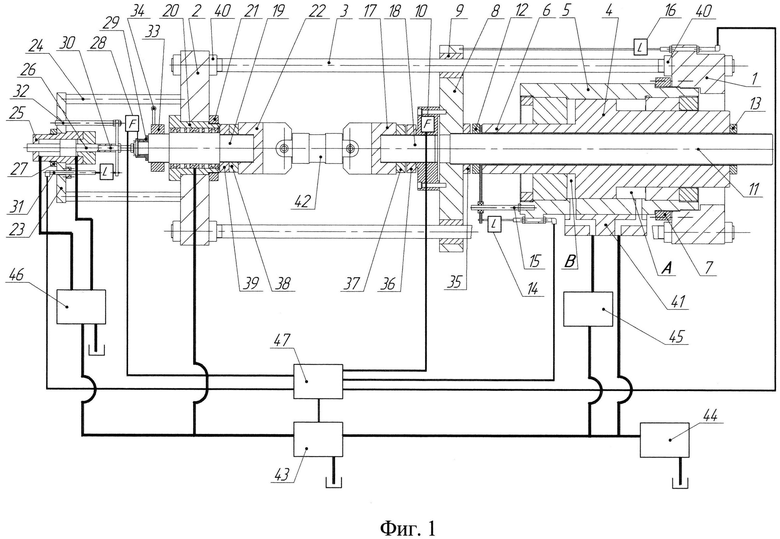
Машина испытательная сервогидравлическая для исследования эксплуатационных характеристик антисейсмических гидроамортизаторов атомных реакторов, включающая нагружающее устройство, содержащее основание, неподвижную траверсу, жестко связанные между собой колоннами, поперечину, жестко связанную с неподвижной траверсой колонками, гидроцилиндр на предельную нагрузку, установленный в основании и жестко с ним скрепленный, подвижную траверсу, сопряженную с колоннами через антифрикционные втулки и жестко скрепленную с плунжером гидроцилиндра на предельную нагрузку, один из двух захватов для закрепления исследуемых гидроамортизаторов, скрепленный с подвижной траверсой через датчик силы, гидроцилиндр малых сил, установленный в поперечине и жестко с ней скрепленный и своим плунжером через датчик малых сил, соединенный с установленным в неподвижной траверсе на гидростатическом подшипнике штоком со вторым захватом, датчики перемещения, а также включающая насосную установку, систему управления, измерения и обработки результатов исследования, отличающаяся тем, что у гидроцилиндра на предельную нагрузку площади рабочих полостей отличаются в два раза: управляемой является полость с большей площадью, а в полости с меньшей площадью поддерживается с помощью насосной установки постоянное давление, а также тем, что в конструкцию машины введен резьбовой стержень, помещенный внутри плунжера гидроцилиндра на предельную нагрузку по свободной посадке, одним концом жестко скрепленный с подвижной траверсой, и скрепляемый и раскрепляемый при помощи двух гаек с плунжером, имеющим возможность продольного смещения относительно резьбового стержня.
| МАШИНА ИСПЫТАТЕЛЬНАЯ ГИДРАВЛИЧЕСКАЯ | 2011 |
|
RU2535531C2 |
| МАШИНА ДЛЯ ИСПЫТАНИЯ ВИНТОВЫХ ПРУЖИН | 2008 |
|
RU2412430C2 |
| МАШИНА ИСПЫТАТЕЛЬНАЯ УНИВЕРСАЛЬНАЯ СЕРВОГИДРАВЛИЧЕСКАЯ ДЛЯ МЕХАНИЧЕСКИХ ИСПЫТАНИЙ ОБРАЗЦОВ МАТЕРИАЛОВ НА РАСТЯЖЕНИЕ, СЖАТИЕ, ИЗГИБ И МАЛОЦИКЛОВУЮ УСТАЛОСТЬ ПРИ РАСТЯЖЕНИИ-СЖАТИИ | 2018 |
|
RU2678935C1 |
| JP 60073433 A, 25.04.1985. | |||

