ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к устройствам для обработки яиц. Более конкретно, настоящее изобретение относится к модулю для переноса яиц, способному обеспечить гибкость при переносе яиц, имеющих разную форму, размеры и ориентацию, а также к связанным с ним системам и способам.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Для выполнения технологических операций с птичьими яйцами в инкубаторно-птицеводческом хозяйстве или других комплексах по выполнению технологических операций с яйцами (например, с пищевыми яйцами) используются различные механические системы. В инкубатории такие механические системы для выполнения технологических операций с яйцами могут содержать, например, систему для перемещения яиц, используемую для перемещения яиц из поддона, соединенного с инкубатором для яиц (обычно называемым «лотком»), в контейнер, соединенный с выводным инкубатором (обычно называемым «выводной корзиной»). В других вариантах выполнения пример подобных механических систем для выполнения технологических операций с яйцами может включать систему для удаления яиц, предназначенную для удаления отдельных яиц из лотков. При наличии систем для удаления яиц обычной практикой является удаление неживых яиц от живых яиц с целью увеличения доступного пространства инкубатора, уменьшения риска заражения, а также с целью снижения затрат на вакцины, относящиеся к вакцинированию in ovo. В комплексе по выполнению технологических операций с пищевыми яйцами яйца могут перемещаться механически или вручную по разным причинам.
После подъема яйца из лотка с целью его перемещения или удаления, яйцо должно быть удалено из подъемных устройств, обеспечивающих удержание и перемещение яиц. В некоторых вариантах выполнения используются подъемные устройства всасывающего типа, и в этом случае можно всего лишь отключить всасывание для выгрузки яйца. Однако в некоторых вариантах выполнения яйцо может захватываться механически таким образом, что для перемещения яйца из подъемного устройства требуется некоторое усилие. К проблемам, связанным с современными механическими системами перемещения, относятся растрескивание яиц, возможность очистки, требуемая мощность, степень сложности, удобство в обслуживании и переплетение с захватывающими средствами.
Соответственно, имеется необходимость в создании модуля для переноса яиц и связанной с ним системы, способной последовательно перемещать захваченные яйца простым образом и имеющей гибкость, с учетом яиц различных форм, размеров и направлений захвата. Кроме того, имеется необходимость в создании соответствующего способа, который упростит и обеспечит более эффективное перемещение захваченных яиц.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Указанные выше и другие потребности решаются с помощью аспектов настоящего изобретения, причем в соответствии с одним аспектом предложен модуль для переноса яиц, имеющий устройство для удержания яиц, выполненное с возможностью захвата яиц. С устройством для удержания яиц соединен свободно перемещающийся выталкиватель, который выполнен с возможностью свободного перемещения относительно него. На определенном расстоянии от устройства для удержания яиц установлен упор. Свободно перемещающийся выталкиватель выполнен с возможностью взаимодействия с упором для обеспечения своего перемещения относительно устройства для удержания яиц, чтобы тем самым переместить яйцо из устройства для удержания яиц.
В другом аспекте предложен способ перемещения яиц. Способ включает захват яйца с помощью устройства для удержания яиц. Способ также включает перемещение яйца с помощью устройства для удержания яиц. Способ также включает перемещение яйца из устройства для удержания яиц с помощью свободно перемещающегося выталкивателя, связанного с устройством для удержания яиц и выполненного с возможностью свободного перемещения относительного него, при этом свободно перемещающийся выталкиватель выполнен с возможностью взаимодействия с упором для обеспечения своего перемещения относительно устройства для удержания яиц.
Таким образом, различные аспекты настоящего изобретения обеспечивают преимущества, которые подробно описаны в настоящем документе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Таким образом, после описания различных вариантов выполнения настоящего изобретения в общих чертах, ниже они описаны со ссылкой на сопровождающие чертежи, которые не обязательно приведены в масштабе и на которых:
Фиг. 1 изображает схематический вид в аксонометрии системы для выполнения технологических операций с яйцами, выполненной с возможностью использования множества модулей для переноса яиц, в соответствии с одним аспектом настоящего изобретения;
Фиг. 2 и 3 изображают схематические виды в аксонометрии различных удерживающих конструкций для устройства для удержания яиц в соответствии с аспектами настоящего изобретения;
Фиг. 4 изображает вид сбоку яйца, удерживаемого модулем для переноса яиц в соответствии с одним аспектом настоящего изобретения;
Фиг. 5 изображает вид в аксонометрии выталкивателя, соединенного с устройством для удержания яиц в соответствии с одним аспектом настоящего изобретения, при этом выталкиватель находится в отведенном положении;
Фиг. 6 изображает вид в аксонометрии выталкивателя, соединенного с устройством для удержания яиц в соответствии с одним аспектом настоящего изобретения, при этом выталкиватель находится в выдвинутом положении;
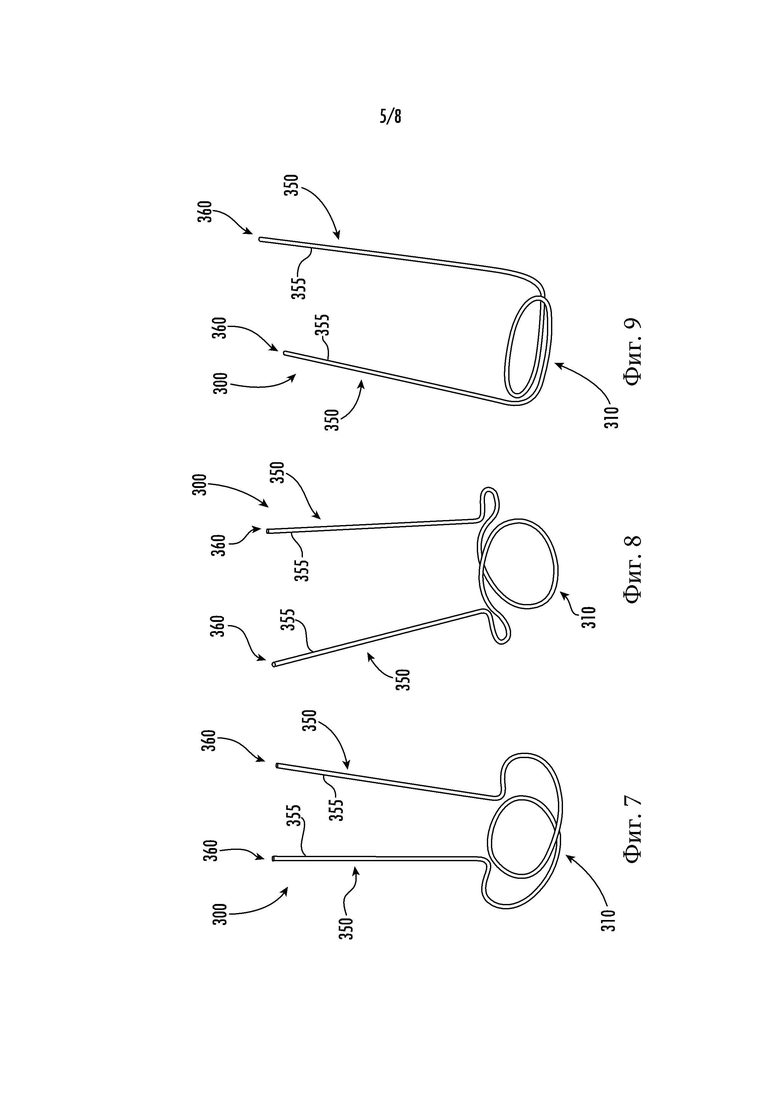
Фиг. 7 изображает, вид в аксонометрии выталкивателя, выполненного с возможностью использования в модуле для переноса яиц, в соответствии с одним аспектом настоящего изобретения;
Фиг. 8 изображает вид в аксонометрии выталкивателя, выполненного с возможностью использования в модуле для переноса яиц, в соответствии с другим аспектом настоящего изобретения;
Фиг. 9 изображает, вид в аксонометрии выталкивателя, выполненного с возможностью использования в модуле для переноса яиц, в соответствии с еще одним аспектом настоящего изобретения;
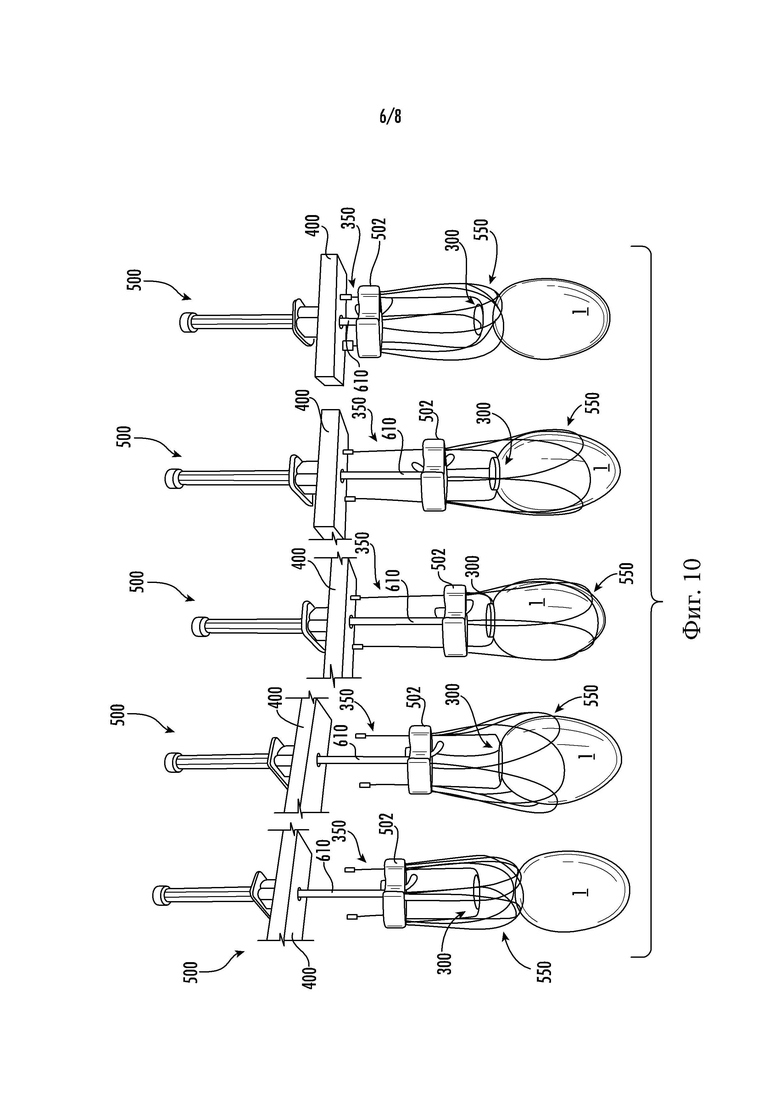
Фиг. 10 иллюстрирует, последовательность захвата и высвобождения яиц в модуле для переноса яиц, в соответствии с одним аспектом настоящего изобретения;
Фиг. 11 изображает вид в аксонометрии части модуля для переноса яиц, имеющего фиксатор положения, в соответствии с одним аспектом настоящего изобретения; и
Фиг. 12 изображает развернутый вид в аксонометрии части модуля для переноса яиц, имеющего фиксатор положения, в соответствии с одним аспектом настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Далее более подробно описаны различные аспекты изобретения со ссылками на сопровождающие чертежи, на которых показаны некоторые, но не все аспекты изобретения. В действительности, настоящее изобретение может быть реализовано во многих различных формах и не должно быть истолковано как ограниченное аспектами, изложенными в настоящем документе; скорее, эти аспекты выполнены таким образом, что настоящее изобретение будет удовлетворять применяемым законодательным нормам. Одинаковые номера позиций относятся к одинаковым элементам во всем документе.
Настоящее изобретение относится к устройствам, системам и способам, выполненным с возможностью захвата и извлечения яиц для их переноса простым образом. В соответствии с некоторыми аспектами, в настоящем изобретении предложены усовершенствованные механические средства для захвата и извлечения яиц, по сравнению с устройствами для подъема яиц всасывающего типа. Однако следует понимать, что раскрытые в настоящем документе механические средства для извлечения также могут быть реализованы в устройствах для подъема яиц всасывающего типа, чтобы удалять яйца из таких устройств всасывающего типа.
Такие аспекты, касающиеся механического захвата и извлечения, в соответствии с настоящим изобретением, обеспечивают ряд преимуществ, в том числе упрощение средств для удержания и извлечения яиц, повышение простоты обслуживания, повышение надежности и улучшение приспособляемости для захвата и извлечения яиц разных размеров, форм и ориентации. В этой связи проблема, которую необходимо решить, имеет отношение к более упрощенному выполнению механических технологических операций с яйцами, в частности с яйцами, содержащими живые зародыши, для которых риски растрескивания снижаются благодаря решению, в котором предусмотрена адаптируемость к захвату и извлечению яиц, имеющих разную форму и размеры и расположенных с различными ориентациями.
Фиг. 1 иллюстрирует автоматизированную систему 100 для выполнения технологических операций с яйцами. В соответствии с конкретным аспектом, показанным на Фиг. 1, система 100 выполнена с возможностью удаления и/или переноса яиц. При этом аспекты настоящего изобретения не ограничены системой 100, показанной на Фиг. 1. Аспекты настоящего изобретения могут быть реализованы в любой системе или в любом устройстве, в которых требуется осуществить прикрепление яиц, причем прикрепленные яйца должны быть размещены на более позднем этапе. Например, аспекты настоящего изобретения могут быть реализованы в системе для переноса яиц, используемой для перемещения яиц из инкубационного лотка (так называемого «лотка для яиц») в выводной лоток (так называемую «выводную корзину»). В других вариантах выполнения аспекты настоящего изобретения могут быть реализованы в системе для удаления яиц, используемой для удаления подозрительных яиц (например, содержащих нежизнеспособный эмбрион) из лотка для яиц перед инъекцией in ovo или перед переносом в выводную корзину.
Как показано на Фиг. 1, система 100 может быть, в частности, использована для удаления яиц, расположенных в лотке для яиц, который содержит гнезда для размещения отдельных яиц и обеспечивающих, в целом, вертикальное расположение яиц, хотя яйца внутри отдельных гнезд часто могут иметь разную степень наклона. С помощью системы 100 все яйца или отобранные яйца могут быть удалены из лотка для яиц, когда они расположены ниже головки 200 для выполнения технологических операций с яйцами.
В соответствии с некоторыми аспектами, система 100 для выполнения технологических операций с яйцами может содержать раму 110 и конвейерный узел 112, обеспечивающий перемещение лотков для яиц в автоматизированном режиме в системе 100 к положению удаления. Конвейерный узел 112 может содержать направляющую систему, выполненную с возможностью приема и направления лотков для яиц к положению удаления. Конвейерный узел 112 может также содержать соответствующие ограничительные элементы, датчики, приводные ремни, бесконечные петли, двигатели и т.д. для соответствующего дискретного перемещения и размещения лотков для яиц в системе 100. В некоторых вариантах выполнения лотки для яиц могут продвигаться через систему 100 вручную.
Яйца, поступающие в систему 100 для выполнения технологических операций с яйцами в лотках для яиц, могут иметь различные классификационные характеристики. Например, лотки для яиц могут содержать яйца, классифицируемые по жизнеспособности, содержанию патогенных микроорганизмов, генетическим анализам или их комбинациям. Таким образом, яйца пропускают через систему для классификации яиц с целью классификации каждого яйца, содержащегося в лотке для яиц. Такие яйца могут быть классифицированы как жизнеспособные или нежизнеспособные (то есть, те яйца, которые не содержат жизнеспособный эмбрион в соответствии с системой классификации яиц), при этом нежизнеспособные яйца могут далее подразделяться, например, на бесплодные, сгнившие или мертвые яйца. Иллюстративные системы для классификации яиц могут быть выполнены с возможностью классификации яиц с использованием, например, методов просвечивания яиц (непрозрачность, инфракрасное излучение, ближнее инфракрасное излучение и т.д.), методов отбора проб или других известных и подходящих способов классификации, процессов или методов. После классификации яйца могут быть извлечены соответствующим образом из лотка для яиц с использованием системы 100, в соответствии с установленной классификацией, например, удаляя нежизнеспособные яйца из лотка для яиц.
Как показано на Фиг. 1, система 100 может содержать головку 200 для выполнения технологических операций с яйцами, соединенную с рамой 110. В соответствии с аспектами настоящего изобретения, головка 200 для удаления яиц может содержать множество модулей 500 для переноса яиц, показанных на Фиг. 4 и 9, выполненных с возможностью избирательного или неизбирательного захвата яиц из лотка для яиц. В некоторых вариантах выполнения головка 200 для удаления яиц может содержать пластину 220, к которой прикреплено, присоединено или иным образом прицеплено одно или несколько устройств 600 для удержания яиц. В соответствии с некоторыми аспектами, в пластине 220 могут быть выполнены отверстия для приема устройств 600 для удержания яиц. В некоторых вариантах выполнения устройствами 600 можно управлять выборочно или по отдельности. То есть, устройства 600 могут перемещаться выборочно, в результате чего можно выборочно управлять их взаимодействием с соответствующими яйцами. Например, устройства 600 для удержания яиц могут быть выполнены с возможностью выборочного взаимодействия с соответствующими яйцами таким образом, что только те яйца, которые идентифицированы как первая подгруппа яиц (например, живые или жизнеспособные), входят в контакт для удаления или перемещения из лотка для яиц. В таких вариантах выполнения вторая подгруппа яиц (например, неживые или нежизнеспособные), может оставаться в лотке для яиц для дальнейшего выполнения технологических операций, не входя в контакт с любым одним из устройств 600.
В соответствии с некоторыми аспектами, конвейерный узел 112 может перемещать яйца, хранящиеся в лотке для яиц, через систему для классификации яиц так, что каждое яйцо проходит через него таким образом, что данные (классификационный признак яйца) могут быть созданы для каждого яйца. Данные, собранные с помощью системы для классификации яиц, могут быть направлены в контроллер для обработки и хранения данных, относящихся к каждому яйцу. При этом контроллер может быть выполнен с возможностью генерирования выборочного сигнала удаления, посылаемого к устройствам 600 для удержания яиц так, чтобы отдельные устройства 600 (или подмножества устройств 600), в зависимости от классификационного признака для каждого яйца, с учетом данных, собранных с помощью системы для классификации яиц, по отдельности и индивидуально перемещались к различным положениям.
В других вариантах выполнения устройство 100 для выполнения технологических операций с яйцами может содержать головку 200 для выполнения технологических операций с яйцами, соединенную с рамой 110 и выполненную с возможностью вертикального перемещения для взаимодействия с яйцами, содержащимися в лотке для яиц, когда те находятся в положении удаления под головкой 200. Головка 200 может иметь пневматический или электрический привод для осуществления вертикального перемещения, чтобы обеспечить взаимодействие с яйцами в лотке для яиц. В некоторых вариантах выполнения головка 200 может опускаться и подниматься пневматически с помощью передаточного цилиндра (не показан), гидравлически связанного с пневматической системой, как известно специалистам в данной области техники. В некоторых вариантах выполнения модули 500 для переноса яиц могут быть расположены на головке, прикрепленной к раме роботизированной системы, имеющей шарнирный робот-манипулятор. Роботизированная система может иметь направляющую систему, выполненную с возможностью размещения модулей 500 вблизи яйца для взаимодействия с ним.
Система 100 для выполнения технологических операций с яйцами может быть выполнена с возможностью взаимодействия или вхождения в контакт с яйцами для их удаления из лотка для яиц с использованием устройства 600 модуля 500 для переноса яиц. В соответствии с некоторыми аспектами, как показано на Фиг. 2 и 3, устройство 600 может содержать удерживающее устройство 550, сформированное из нескольких зацепляющих элементов 555, которые взаимодействуют с образованием конструкции наподобие оплетки, способной механически захватывать яйцо. В некоторых вариантах выполнения удерживающее устройство 550 может проходить от корпуса 502, при этом корпус 502 выполняет функцию основания, из которого выступают зацепляющие элементы 555. Корпус 502 может быть выполнен как единая цельная конструкция с захватывающими элементами 555, тогда как в других вариантах выполнения корпус 502 может быть выполнен отдельно относительно зацепляющих элементов 555. Зацепляющие элементы 555 образуют полость 556, в которой удерживается яйцо.
Зацепляющие элементы 555 могут быть выполнены с возможностью механического захвата яйца с использованием физического контакта и взаимодействия, в результате чего яйцо может быть захвачено из лотка для яиц или из другого контейнера или с поверхности. Зацепляющие элементы 555 могут быть выполнены с возможностью изгибания вокруг яйца таким образом, что яйцо помещается или прикрепляется внутри полости 556, образованной зацепляющими элементами 555. Зацепляющие элементы 555 могут образовывать просвет 560, через который проходит яйцо для размещения. Центральная ось 510 может быть задана в устройстве 600 как его продольная ось по длине устройства. Просвет 560 сформирован вокруг центральной оси 510 и на дистальном конце 554 устройства 600 для удержания яиц. Просвет 560 может иметь любые размеры и формы. Зацепляющие элементы 555 могут изгибаться вокруг яйца для захвата яйца и удержания яйца в полости 556 без механического приведения в действие зацепляющих элементов 555, хотя в некоторых вариантах выполнения может быть использовано механическое приведение в действие зацепляющих элементов 555.
В соответствии с некоторыми аспектами, зацепляющие элементы 555 могут проходить от корпуса 502 или выступать из него. В некоторых вариантах выполнения, как показано на Фиг. 2, зацепляющие элементы 555 могут быть переплетены с образованием каркаса из перекрывающих друг друга частей, которые охватывают и окружают яйцо. Зацепляющие элементы 555 могут иметь разные размеры, расположения или конструкции, которые позволяют захватывать яйцо, используя в качестве средства для захвата яйца физический контакт и взаимодействие с яйцом.
В соответствии с различными аспектами, как показано на Фиг. 2 и 3, зацепляющие элементы 555 могут представлять собой петли, проходящие от корпуса 502, с образованием преимущественно U-образной формы. В данном конкретном аспекте каждый зацепляющий элемент 555 может иметь два прямых сегмента 530, проходящих от корпуса 502 и соединенных дугообразным сегментом 532. Длина зацепляющих элементов 555 позволяет принимать яйца разного размера. Когда дистальный конец 554 устройства 600 для удержания яиц взаимодействует с яйцом, дугообразные сегменты 532 физически контактируют с яйцом и перемещаются по поверхности скорлупы, когда зацепляющие элементы 555 охватывают яйцо. Зацепляющие элементы 555 могут проходить от корпуса 502 под разными углами.
В соответствии с некоторыми аспектами, зацепляющие элементы 555 могут быть выполнены из податливого, гибкого или упругого материала, чтобы изгибаться вокруг яйца при контакте с ним. Зацепляющие элементы 555 могут быть изготовлены из различных материалов, обладающих способностью изгибаться, упругостью или эластичностью, например, из эластичных материалов, упругих материалов, сверхупругих материалов, псевдо-упругих материалов и материалов с памятью формы. В некоторых вариантах выполнения зацепляющие элементы 555 могут быть изготовлены из материала с памятью формы (например, сплава с памятью формы или полимера с памятью формы), обладающего способностью возвращаться из деформированного состояния (временной формы) в свою первоначальную (постоянную) форму. В некоторых вариантах выполнения материал с памятью формы может возвращаться в свою первоначальную форму при воздействии внешних факторов, например, при изменении температуры. В других вариантах выполнения зацепляющие элементы 555 могут быть изготовлены из сверхупругого сплава (например, никель-титанового (нитинол)), который при деформации возвращается к своей форме до деформации без воздействия внешних факторов. При механической нагрузке сверхупругий сплав деформируется обратимо до максимальных значений деформаций (до 10%) путем создания фазы, вызванной воздействием напряжений. При снятии нагрузки новая фаза становится нестабильной и материал восстанавливает свою первоначальную форму. Такие сверхупругие материалы, псевдоупругие материалы и материалы с памятью формы имеют преимущество сопротивления усталости, что является важным фактором с учетом значительного количества обрабатываемых яиц в инкубаториях и при промышленном производстве пищевых яиц. Примеры материалов, подходящих для использования в соответствии с настоящим изобретения, включают, но не ограничиваются ими, нитинол, сплавы CuZnAl, сплавы CuAINi и сплавы CuAlBe. Кроме того, в соответствии с настоящим изобретением, могут быть пригодны для использования полимеры с памятью формы, такие как пенополиуретаны или блок-сополимеры (например, полиэтилентерефталат (ПЭТФ), полиэтиленоксид (ПЭО) и т.д.). В некоторых вариантах выполнения зацепляющие элементы 555 могут быть выполнены из металлических сплавов (например, из нержавеющей стали) или полимерных компонентов или их комбинаций. В некоторых вариантах выполнения зацепляющие элементы 555 могут быть выполнены в форме упругой или гибкой проволоки (металлической или полимерной жилы).
В соответствии с некоторыми аспектами, устройство 600 для удержания яиц может содержать приводное устройство, выполненное с возможностью перемещения зацепляющих элементов 555 по яйцу для захвата яйца. Приводное устройство может представлять собой линейный привод 605, например, пневматически регулируемый цилиндр, имеющий поршневой шток 610 с концом 615, который может быть прикреплен, соединен или иным образом функционально взаимодействовать с корпусом 502 (например, с помощью верхнего штифта 620 и нижнего штифта 625) таким образом, что перемещение корпуса 502 при приведении в действие поршневого штока 610 также приводит к перемещению зацепляющих элементов 555, поскольку в некоторых вариантах выполнения зацепляющие элементы 555 прочно прикреплены к корпусу 502. В вариантах выполнения, в которых устройствами 600 для удержания яиц управляют выборочно, каждое приводное устройство может быть выполнено с возможностью приема сигнала, указывающего на классификационный признак яйца для соответствующих яиц в лотке, в результате чего приводные устройства могут приводиться в действие выборочно, облегчая тем самым взаимодействие или контакт конкретно выбранных устройств 600 с соответствующими яйцами.
В соответствии с некоторыми аспектами, модуль 500 для переноса яиц может содержать выталкиватель 300, выполненный с возможностью извлечения, удаления, вытеснения, перемещения или высвобождения яйца иным способом из удерживающего устройства 550 в устройстве 600 для удержания яиц. В некоторых вариантах выполнения выталкиватель 300 может быть выполнен свободно перемещающимся, при этом выталкиватель 300 обладает подвижностью относительно устройства 600. То есть выталкиватель 300 перемещается свободно, без приведения в действие, относительно устройства 600, даже если выталкиватель 300 и устройство 600 соединены тем или иным способом. В этом случае выталкиватель 300 можно назвать «плавающим» выталкивателем, при этом для перемещения выталкивателя 300 относительно устройства 600 или его компонентов требуется внешнее усилие. Например, выталкиватель 300 может входить в контакт с яйцом при захвате яйца устройством 600 для удержания яиц, тем самым подталкивая выталкиватель 300 вверх, когда яйцо перемещается в полости 556, как показано на Фиг. 4, в результате чего выталкиватель 300 «плавает» на яйце (т.е. оказывает небольшое сопротивление или не оказывает никакого сопротивления) при его продвижении в удерживающем устройстве 550. Аналогичным образом, для извлечения яйца из удерживающего устройства 550 может быть приложено внешнее усилие, принудительно перемещая выталкиватель 300 к дистальному концу 554 удерживающего устройства 550. При использовании схемы перемещения яиц без приводных средств, модуль 500 для переноса яиц в целом упрощается и становится более экономически эффективным. То есть, для извлечения яйца выталкивателю 300 не требуется дополнительное усилие, например, активный механический толчок, а вместо этого обеспечена простая пассивная схема извлечения, улучшающая, в свою очередь, функционирование модуля 500 и его надежность. Кроме того, поскольку выталкиватель 300 расположен «плавающим» образом, то для него не требуется использование неразъемного монтажа, и поэтому он может быть легко отсоединен для замены или очистки.
В соответствии с различными аспектами, как показано на Фиг. 7-9, выталкиватель 300 может быть выполнен из одного или нескольких упругих материалов, например, в форме упругой проволочной конструкции. В некоторых вариантах выполнения материал(ы), выбранный(е) для изготовления выталкивателя 300, может(гут) быть таким(и) же, как материал(ы), использованный(е) для изготовления зацепляющих элементов 555, как описано выше; хотя в других вариантах выполнения материалы могут быть другими. Выталкиватель 300 может принимать множество различных форм, структур или конфигураций для того, чтобы входить в контакт с яйцом и физически перемещать яйцо из удерживающего устройства 550.
В соответствии с некоторыми аспектами, выталкиватель 300 может содержать одну или несколько зацепляющих частей 310, выполненных с возможностью контакта с яйцом для принудительного выведения яйца из взаимодействия с удерживающим устройством 550. Зацепляющая часть 310 может иметь такую форму, чтобы распределять выталкивающее усилие для уменьшения вероятности растрескивания яйца, в частности, когда яйцо подвергается инъецированию in ovo, при котором в скорлупе яйца (обычно на одном конце яйца) выполняется отверстие. Например, как показано на Фиг. 7-9, зацепляющая часть 310 может быть по существу круглой, чтобы охватывать конец яйца при контакте с ним (см. Фиг. 4). Кроме того, выталкиватель 300 может быть выполнен с возможностью обеспечения гибкости и/или упругости путем выполнения проволоки в виде пружины или отклоняющей формы, чему также может способствовать использование материалов с памятью формы и т.п. В этой связи участок зацепляющей части 310 и/или рабочего(их) элемента(ов) 350 может иметь, по меньшей мере частично, спиральную или иную извилистую структуру. Конфигурация выталкивателя 300 предпочтительно может иметь форму, позволяющую избежать переплетения с удерживающим устройством 550.
Для обеспечения пассивного и не приводного высвобождения яйца, выталкиватель 300 может взаимодействовать с упором 400, как показано на Фиг. 4, который в некоторых вариантах выполнения может представлять собой пластину 220, к которой прикреплено устройство 600 для удержания яиц. Упор 400 может быть предназначен для принудительного продвижения выталкивателя 300 к дистальному концу 554 удерживающего устройства 550, тем самым перемещая яйцо из устройства 600 для удержания яиц. В соответствии с различными иллюстративными аспектами, как показано на Фиг. 7-9, выталкиватель 300 может содержать один или несколько рабочих элементов 350, таких как стержень 355. Рабочие элементы 350 могут быть непосредственно или опосредованно прикреплены к зацепляющей части 310. В некоторых вариантах выполнения, как показано на Фиг. 11 и 12, рабочие элементы 350 могут быть соединены с зацепляющей частью 310 с помощью сужающихся частей 380. Упор 400 может контактировать с рабочим(и) элементом(ами) 350 с целью продвижения зацепляющей части 310 для удаления яйца 1 из удерживающего устройства 550. В некоторых вариантах выполнения упор 400 может быть неподвижным, так что рабочий(е) элемент(ы) 350 продвигает(ют)ся к упору для обеспечения физического взаимодействия между ними, в то время как в других вариантах выполнения рабочие элементы 350 могут быть неподвижными, так что для обеспечения физического взаимодействия между ними может продвигаться упор 400. Тем не менее, это взаимодействие между рабочим(и) элементом(ами) 350 и упором 400 приводит к тому, что свободно перемещающийся выталкиватель 300 пассивно перемещает яйцо из удерживающего устройства 550. Фиг. 5 иллюстрирует выталкиватель 300 в отведенном положении, и Фиг. 6 иллюстрирует выталкиватель 300 в выдвинутом положении.
Как показано на Фиг. 4-6, стержни 355 могут проходить через отверстия 504 (например, пазы, отверстия и т.д.), образованные в корпусе 502. В соответствии с этим конкретным аспектом, концы 360 стержней 355 продвигаются для принудительного вхождения в контакт с упором 400 для перемещения захватывающей части 310 к дистальному концу 554 удерживающего устройства 550. При этом поршневой шток 610 втягивается, в результате чего прикрепленный к нему корпус 502 перемещается к упору 400, продвигая при этом стержни 355 к упору 400. Таким образом, стержни 355 действуют как поршни, толкая захватывающую часть 310 к дистальному концу 554, в результате длина стержней 355 определяет расстояние, на которое может переместиться захватывающая часть 310. В некоторых вариантах выполнения выталкиватель 300 может содержать один или несколько стопоров 375 для предотвращения отсоединения выталкивателя 300 от устройства 600 для удержания яиц. Стопоры 375 могут быть выполнены с выталкивателем 300 как одно целое или же могут представлять собой отдельную деталь, прикрепленную к нему. Например, стержни 355 могут быть изогнутыми, чтобы не допустить прохождения концов 360 через отверстия 504. В некоторых вариантах выполнения рабочий(е) элемент(ы) 350 может(гут) быть поворотным(и), так что рабочий(е) элемент(ы) 350 поворачивает(ют)ся благодаря взаимодействию с упором 400 для обеспечения перемещения зацепляющей части 310 к дистальному концу 554.
Во время работы, как показано на Фиг. 10, яйцо 1 может находиться или может перемещаться в положение удаления, расположенное под модулем 500 для перемещения яиц. Устройство 600 для удержания яиц начинает работу в полностью поднятом, отведенном или приподнятом положении. Устройство 600 для удержания яиц может затем продвигаться, выдвигаться или опускаться для взаимодействия с яйцом 1 путем приведения в действие поршневого штока 610, после чего удерживающее устройство 550 входит в контакт с яйцом и начинает изгибаться. Удерживающее устройство 550 может далее выдвигаться до полностью опущенного положения, пока яйцо 1 полностью не разместится или не закрепится в нем для извлечения. Во время взаимодействия с яйцом зацепляющие элементы 555 изгибаются и соответствуют форме яйца 1. При продвижении яйца 1 в удерживающем устройстве 550 яйцо 1 входит в контакт с выталкивателем 300, тем самым принудительно перемещая зацепляющую часть 310 выталкивателя 300 к корпусу 502, при этом стержни 350 перемещаются к упору 400. Затем яйцо 1 может быть оттранспортировано в другое место для обработки или же остается в том же самом положении, при этом под ним для приема яйца располагают другой контейнер, как например, выводную корзину.
Затем удерживающее устройство 550 может быть поднято, отведено или иным образом приподнято вверх путем приведения в действие поршневого штока 610. Когда удерживающее устройство 550 отводится, стержни 355 контактируют с неподвижным упором 400, который принудительно перемещает стержни 355 в направлении, противоположном направлению движения удерживающего устройства 550. Таким образом, зацепляющая часть 310 принудительно отодвигается от корпуса 502 к дистальному концу 554, тем самым прикладывая усилие к яйцу 1 для перемещения яйца 1 из удерживающего устройства 550. Когда удерживающее устройство 550 полностью отведено, яйцо 1 пассивно удаляется из него. Затем высвобожденное яйцо 1 может быть оттранспортировано и обработано соответствующим образом.
В некоторых вариантах выполнения, как показано на Фиг. 11, рабочие элементы 350, такие как стержни 355, могут быть соединены иначе, чем с помощью зацепляющей части 310. Например, для соединения части рабочих элементов 350, проходящих за корпус 502, напротив стороны, на которой удерживающее устройство 550 проходит от корпуса 502, может быть использован фиксатор 700 положения. Фиксатор 700 может способствовать уменьшению или предотвращению скручивания рабочих элементов 350 и, в свою очередь, скручиванию выталкивателя 300. В соответствии с одним аспектом, концы 360 стержней 355 могут быть изогнутыми и проходить через корпус 502 для вставления в соответствующие отверстия 702, образованные в фиксаторе 700. Концы 360 могут быть прикреплены к фиксатору с помощью крепежных элементов 750, например, винтов. При этом выталкиватель 300 остается абсолютно подвижным относительно корпуса 502, так как фиксатор 700 не прикреплен к корпусу 502.
В некоторых вариантах выполнения корпус 502 может содержать основную часть 525 и вставку 535, которая может быть соединена с основной частью 525 соответствующими крепежными элементами. В основной части 525 могут быть выполнены профильные отверстия 540, через которые стержни 355 выходят из корпуса 502. Фиг. 12 иллюстрирует часть модуля 500 для переноса яиц с удерживающим устройством 550, отсоединенным для ясности. Фиксатор 700 может иметь разные размеры и формы с целью соединения рабочих элементов 350 снаружи удерживающего устройства 550. В таких вариантах выполнения фиксатор 700 также может свободно перемещаться, чтобы свободно перемещаться при взаимодействии с упором 400. То есть, фиксатор 700 может использоваться в качестве точки контакта для упора 400. Однако в некоторых вариантах выполнения фиксатор 700 может быть расположен ниже концов 360 таким образом, что, хотя фиксатор 700 используется для уменьшения скручивания стержней 355, концы 360 являются точкой контакта для опоры 400.
Многие модификации и другие аспекты настоящего изобретения, изложенные в настоящем документе, будут очевидны для специалиста в данной области техники, к которой относится это изобретение, обладающего преимуществом идей, представленных в вышеприведенном описании и на соответствующих чертежах. Таким образом, следует понимать, что настоящее изобретение не должно быть ограничено конкретными раскрытыми аспектами, и что модификации и другие аспекты также предназначены к включению в объем прилагаемой формулы изобретения. Хотя в настоящем документе используются конкретные термины, они используются только в общем и описательном смысле, а не в целях ограничения.






Модуль включает устройство для удержания яиц, выполненное с возможностью захвата яйца, свободно перемещающийся выталкиватель, присоединенный к устройству для удержания яиц и выполненный с возможностью свободного перемещения, без приведения в действие, относительно указанного устройства, и упор, расположенный на расстоянии от устройства для удержания яиц. Свободно перемещающийся выталкиватель выполнен с возможностью взаимодействия с упором для обеспечения своего перемещения относительно устройства для удержания яиц, чтобы тем самым обеспечить перемещение яйца из устройства для удержания яиц. Также предложен способ переноса яиц, включающий использование устройства для удержания яиц. Группа изобретений обеспечивает работу выталкивателя без использования автоматизированного привода, что упрощает процесс перемещения яиц. 2 н. и 10 з.п. ф-лы, 12 ил.
1. Модуль для переноса яиц, содержащий:
устройство для удержания яиц, выполненное с возможностью захвата яйца,
свободно перемещающийся выталкиватель, присоединенный к устройству для удержания яиц и выполненный с возможностью свободного перемещения, без приведения в действие, относительно указанного устройства, и
упор, расположенный на расстоянии от устройства для удержания яиц, причем свободно перемещающийся выталкиватель выполнен с возможностью взаимодействия с упором для обеспечения своего перемещения относительно устройства для удержания яиц, чтобы тем самым обеспечить перемещение яйца из устройства для удержания яиц.
2. Модуль по п.1, в котором свободно перемещающийся выталкиватель выполнен из упругого материала.
3. Модуль по п.2, в котором свободно перемещающийся выталкиватель выполнен в форме упругой проволочной конструкции.
4. Модуль по п.1, в котором свободно перемещающийся выталкиватель по меньшей мере частично расположен внутри устройства для удержания яиц.
5. Модуль по п.1, в котором устройство для удержания яиц содержит корпус, от которого отходит удерживающее устройство, причем указанный корпус имеет по меньшей мере одно отверстие, через которое обеспечено свободное перемещение свободно перемещающегося выталкивателя.
6. Модуль по п.5, в котором удерживающее устройство содержит несколько зацепляющих элементов.
7. Модуль по п.6, в котором свободно перемещающийся выталкиватель содержит зацепляющую часть для взаимодействия с яйцом и по меньшей мере один стержень, проходящий через указанный корпус для взаимодействия с упором.
8. Модуль по п.5, в котором указанный корпус имеет отверстия, а свободно перемещающийся выталкиватель содержит рабочие элементы, проходящие через указанные отверстия корпуса.
9. Модуль по п.8, содержащий фиксатор положения, выполненный с возможностью присоединения рабочих элементов.
10. Модуль по п.1, в котором свободно перемещающийся выталкиватель содержит по меньшей мере один стопор для предотвращения отсоединения от устройства для удержания яиц.
11. Способ переноса яиц, включающий:
захват яйца с помощью устройства для удержания яиц,
перемещение яйца с помощью устройства для удержания яиц и
перемещение яйца из устройства для удержания яиц с помощью свободно перемещающегося выталкивателя, присоединенного к устройству для удержания яиц и выполненного с возможностью свободного перемещения, без приведения в действие, относительно указанного устройства, причем свободно перемещающийся выталкиватель выполнен с возможностью взаимодействия с упором для обеспечения своего перемещения относительно устройства для удержания яиц.
12. Способ по п.11, в котором при перемещении яйца из устройства для удержания яиц перемещают яйцо из устройства для удержания яиц, имеющего корпус, от которого отходит удерживающее устройство, причем корпус имеет отверстия, через которые обеспечено свободное перемещение свободно перемещающегося выталкивателя, при этом свободно перемещающийся выталкиватель содержит рабочие элементы, проходящие через отверстия корпуса, и имеется фиксатор положения, выполненный с возможностью присоединения рабочих элементов.
| US 2017210571 A1, 07.27.2017 | |||
| GB 689173 A, 25.03.1953 | |||
| Устройство для измерения диаметра цилиндрических деталей | 1988 |
|
SU1573332A1 |
| Способ обработки ножки геморроидального узла при геморроидэктомии | 2022 |
|
RU2792253C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЯИЦ | 1992 |
|
RU2026615C1 |

