ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится в целом к устройствам и системам для обработки яиц. Более конкретно, данное изобретение относится к системам для обработки птичьих яиц, способным селективно взаимодействовать с яйцами, находящимися в лотке или контейнере, и к соответствующему способу.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Для обработки птичьих яиц в птицеводческих инкубаториях используются различные механические обрабатывающие системы. К таким механическим системам для обработки яиц могут относиться, например, перемещающая система для переноса яиц с поддона, связанного с закладочным инкубатором (обычно называемым «лотком») в контейнер, связанный с выводным инкубатором (обычно называемым «выводной корзиной»). В других случаях примером такой механической системы для обработки яиц может быть система для удаления определенных яиц с лотков. В некоторых случаях такие механические системы для обработки яиц могут объединять свойства перемещающей системы и системы для удаления яиц. Еще одним примером таких механических систем для обработки яиц может быть инъекционная система, предназначенная для инъекции обрабатывающих веществ в яйца. Наконец, другим примером таких механических систем для обработки яиц может быть система взятия проб, предназначенная для взятия пробы материала из яиц для анализа.
Как правило, яйца поступают в любую из этих механических обрабатывающих систем в лотках для яиц. В любой момент во время обработки механическими системами или перед ней яйца могут быть подвергнуты процедуре просвечивания, которая может представлять собой ручной или автоматизированный процесс. Процедура просвечивания идентифицирует или иным образом классифицирует яйца в соответствии с заданной схемой классификации (обычно как жизнеспособные или нежизнеспособные). Во время ручного просвечивания рабочий может физически маркировать яйца (например, с помощью маркера) в соответствии со схемой классификации или обрабатывать их иным образом (например, удалять из лотка) в соответствии с классификацией. В автоматизированных системах просвечивания каждому яйцу может быть присвоен классификационный статус и соответствующий классификационный сигнал, который может быть передан системе управления (или механической системе для обработки яиц) для соответствующей обработки. Например, система просвечивания может идентифицировать яйца внутри лотка как либо жизнеспособные, либо нежизнеспособные. Затем система просвечивания может передавать эту классификационную информацию системе удаления яиц для обеспечения удаления из лотка всех яиц, классифицированных как нежизнеспособные.
Яйца, обработанные в таких механических системах для обработки яиц, могут содержать яйца, которые классифицированы как нежизнеспособные (т.е. яйца, не содержащие жизнеспособного эмбриона согласно данным просвечивающей системы) и которые могут быть затем дополнительно классифицированы как, например, бесплодные, тухлые или мертвые яйца. При этом нежизнеспособные яйца могут передать нежелательный биологический материал компонентам механической обрабатывающей системы во время взаимодействия с ними. Такой биологический материал, переданный компонентам механической обрабатывающей системы, затем может быть передан следующему яйцу, взаимодействующему с этим соответствующим компонентом во время последующей обработки следующего лотка. То есть существует вероятность, что при взаимодействии с нежизнеспособными яйцами механическая система для обработки яиц будет способствовать переходу биологического материала нежизнеспособных яиц к жизнеспособным яйцам. Кроме того, в некоторых случаях в яйцах может создаваться давление вследствие накапливания в них бактерий, так что любой контакт с яйцом может вызвать его взрыв (так называемое «лопанье»).
Соответственно, существует потребность в создании системы для обработки яиц, способной селективно направлять взаимодействие ее компонентов с яйцами, содержащимися внутри лотка, либо контактным, либо бесконтактным образом с обеспечением управления взаимодействием с нежелательными яйцами. Кроме того, существует потребность в создании соответствующего способа, способствующего селективному взаимодействию механических компонентов системы для обработки яиц с яйцами в соответствии со схемой классификации яиц.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Вышеуказанные и другие потребности удовлетворяются с помощью аспектов данного изобретения, в котором согласно одному аспекту предложен аппарат для обработки яиц, содержащий головку для обработки яиц. С головкой функционально соединены обрабатывающие устройства, выполненные с возможностью их перемещения при помощи головки в по существу вертикальном направлении. Каждое обрабатывающее устройство имеет конец, предназначенный для взаимодействия с птичьим яйцом. Каждое обрабатывающее устройство выполнено с возможностью его селективного удерживания в неконтактном положении или контактном положении во время процесса обработки так, что первая подгруппа обрабатывающих устройств находится в неконтактном положении при одновременном нахождении второй подгруппы обрабатывающих устройств в контактном положении.
В другом аспекте предложен способ селективной обработки яиц. Способ включает втягивание обрабатывающих устройств, которые совмещены с птичьими яйцами. Способ также включает закрепление первой подгруппы обрабатывающих устройств в неконтактном положении. Способ также включает выдвижение второй подгруппы обрабатывающих устройств с обеспечением их взаимодействия с соответствующими птичьими яйцами, совмещенными с ними. Способ также включает закрепление второй подгруппы обрабатывающих устройств в контактном положении. Кроме того, способ включает обработку птичьих яиц, взаимодействующих со второй подгруппой обрабатывающих устройств.
Таким образом, различные аспекты данного изобретения обеспечивают преимущества, в остальном подробно описанные ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
После описания различных вариантов выполнения данного изобретения в общих чертах ниже сделана ссылка на прилагаемые чертежи, которые не обязательно выполнены в масштабе и на которых:
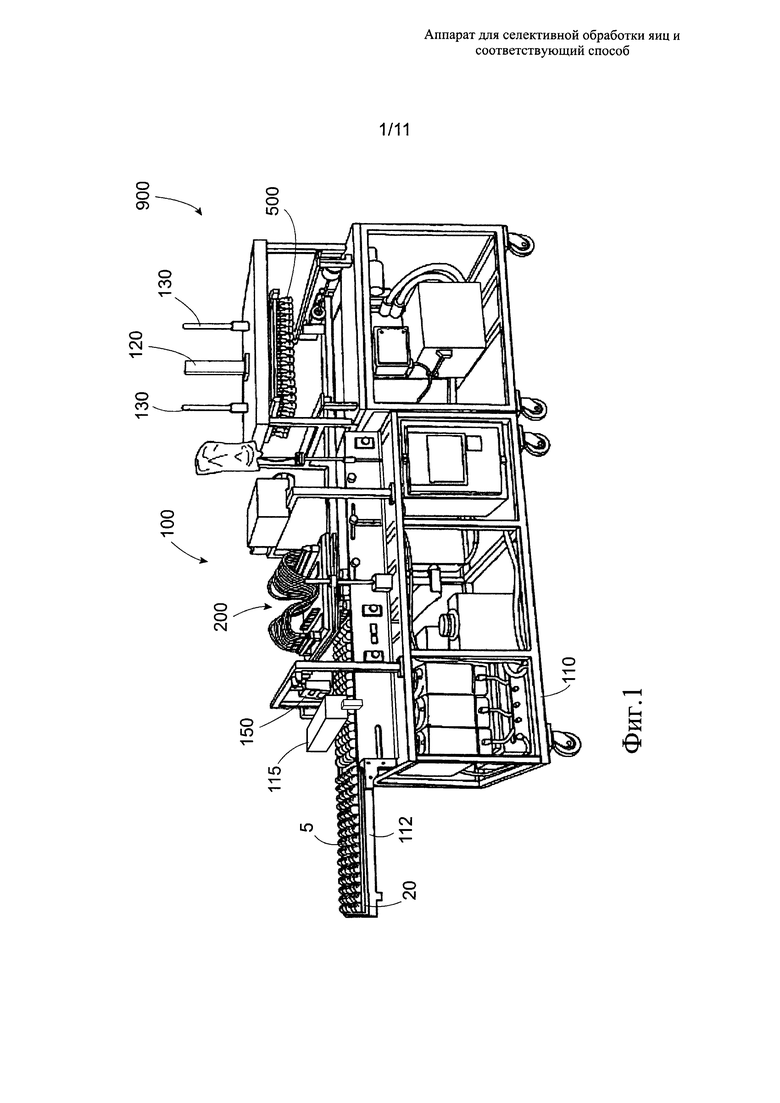
фиг. 1 изображает вид сбоку системы для обработки яиц, выполненной с возможностью осуществления селективного взаимодействия с птичьими яйцами, согласно одному аспекту данного изобретения,
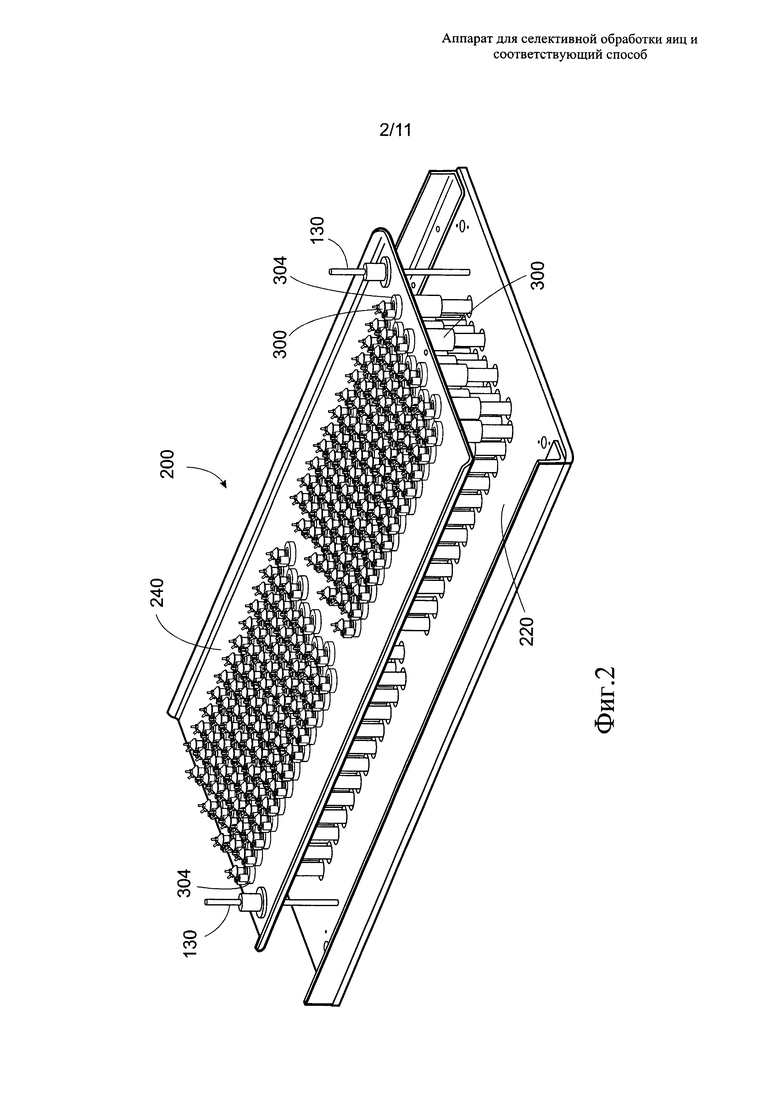
фиг. 2 изображает схематический вид в аксонометрии головки для обработки яиц, выполненной согласно одному аспекту данного изобретения,
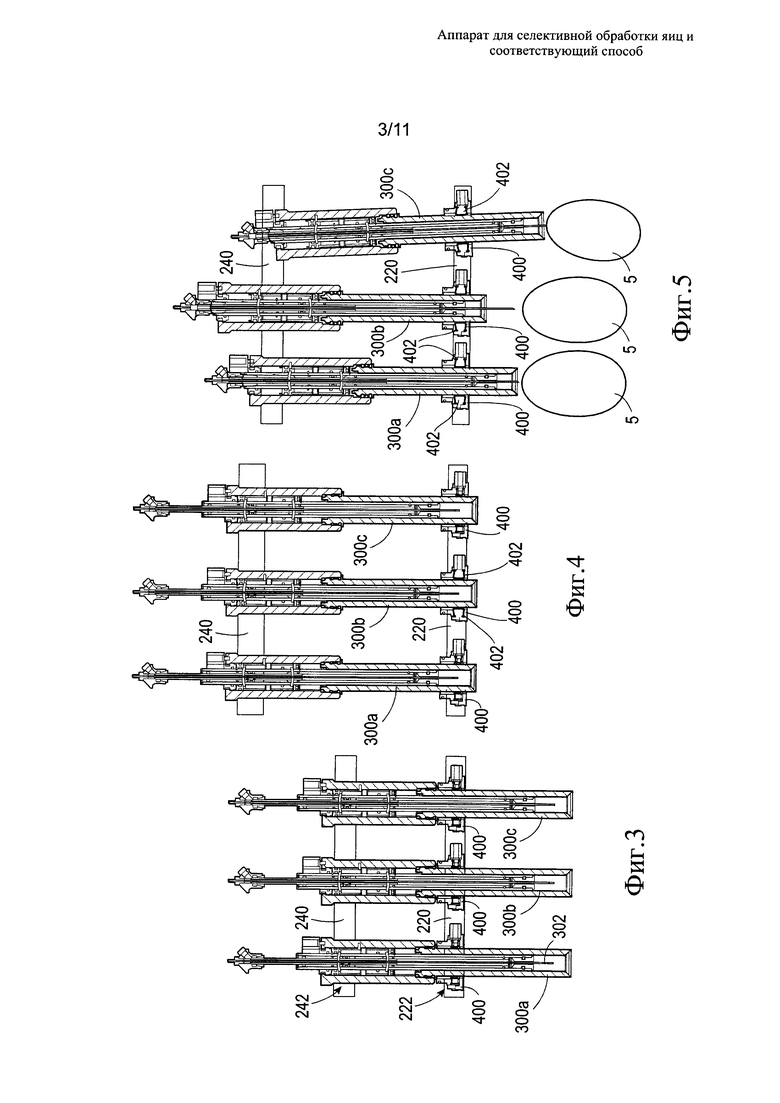
фиг. 3-5 изображают схематические разрезы компонентов головки для обработки яиц, иллюстрирующие аспекты селективного взаимодействия в данном изобретении,
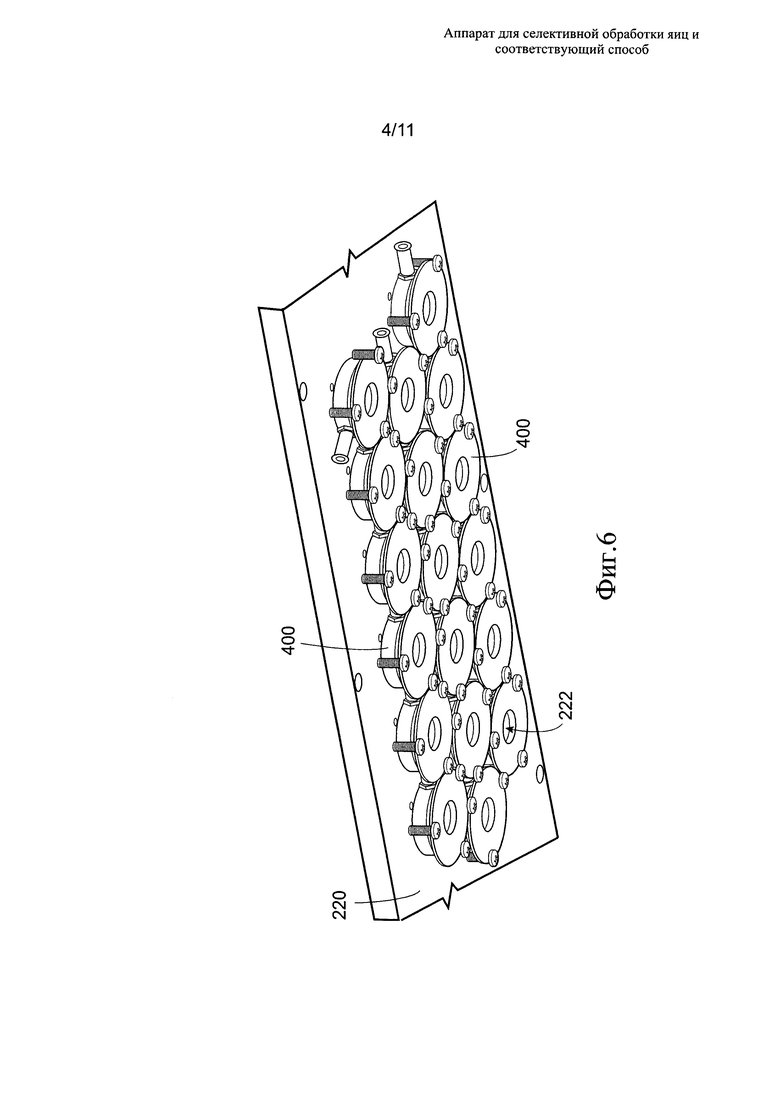
фиг. 6 изображает вид в аксонометрии в разрезе головки для обработки яиц, показанной на фиг. 2, изображающий передающий узел головки, поднимающий яйца с лотка,
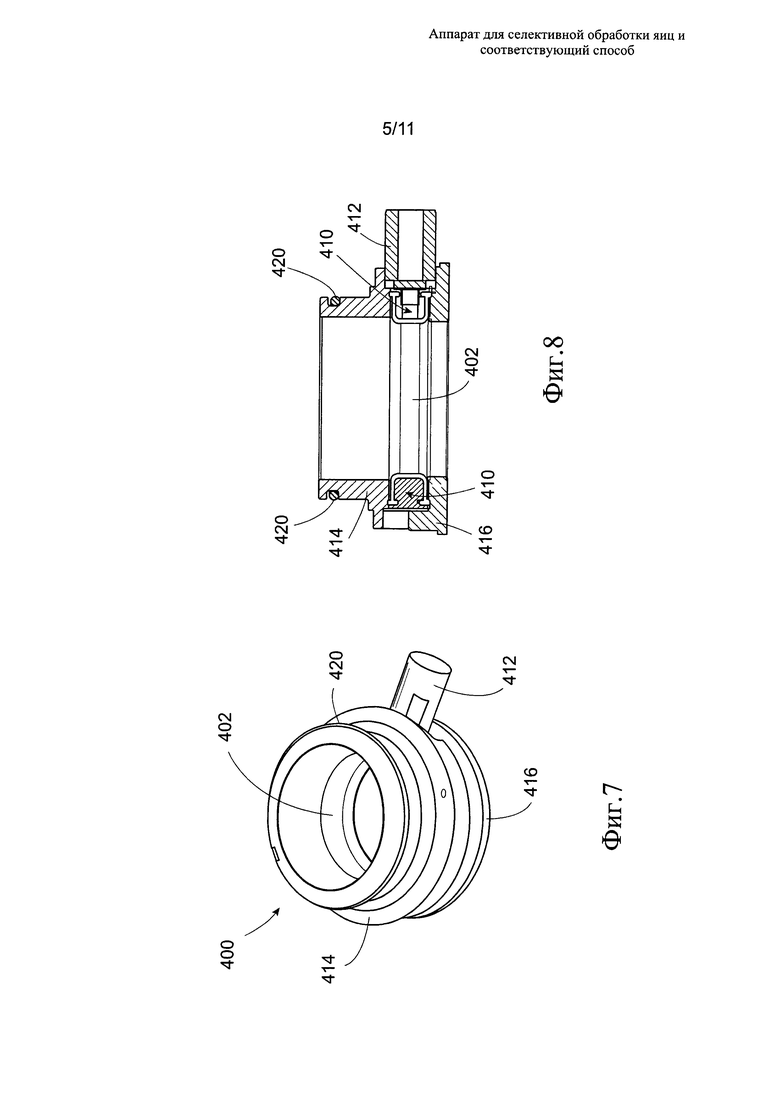
фиг. 7 изображает вид в аксонометрии запирающего устройства, предназначенного для использования с головкой для обработки яиц, согласно одному аспекту данного изобретения,
фиг. 8 изображает схематический разрез запирающего устройства, показанного на фиг. 7,
фиг. 9 изображает запирающее устройство, показанное на фиг. 7, в разобранном виде,
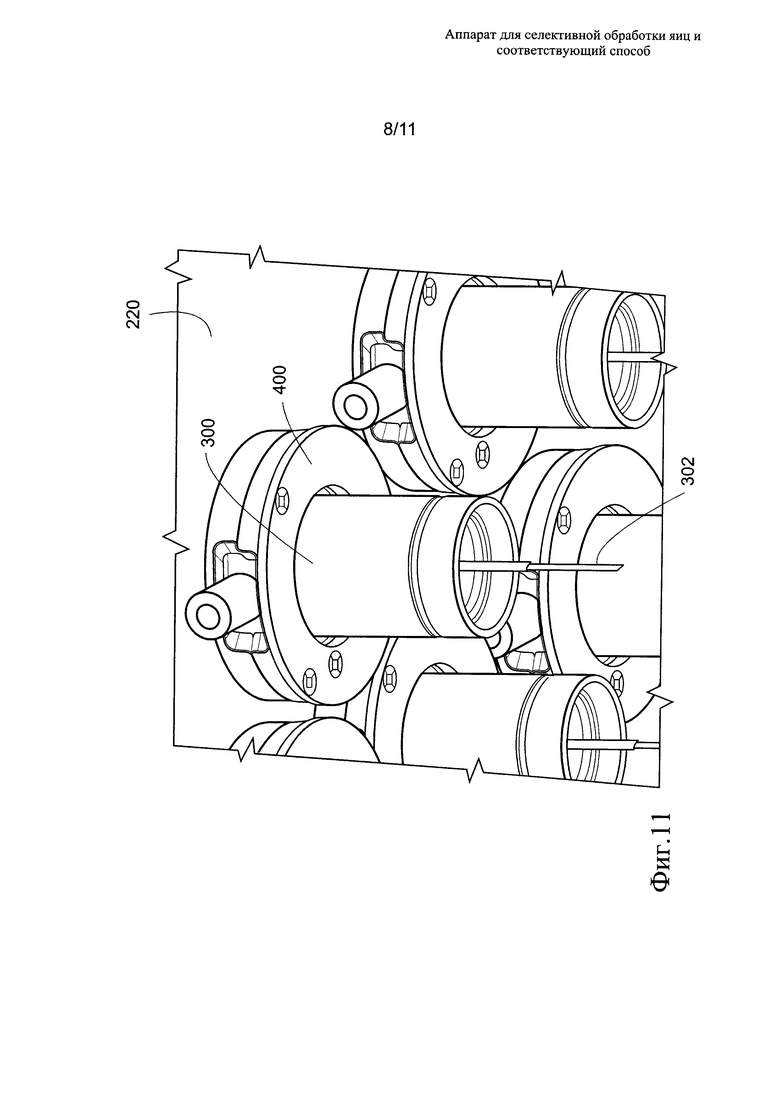
фиг. 10 изображает схематический вид в аксонометрии в разрезе головки для обработки яиц, показанной на фиг. 2, изображающий инъекционные устройства, функционально соединенные с соответствующими запирающими устройствами,
фиг. 11 изображает увеличенный вид инъекционного и запирающего устройств, показанных на фиг. 10,
фиг. 12 изображает схематический разрез объединенного устройства для инъекции и перемещения, предназначенного для использования с головкой для обработки яиц, согласно одному аспекту данного изобретения,
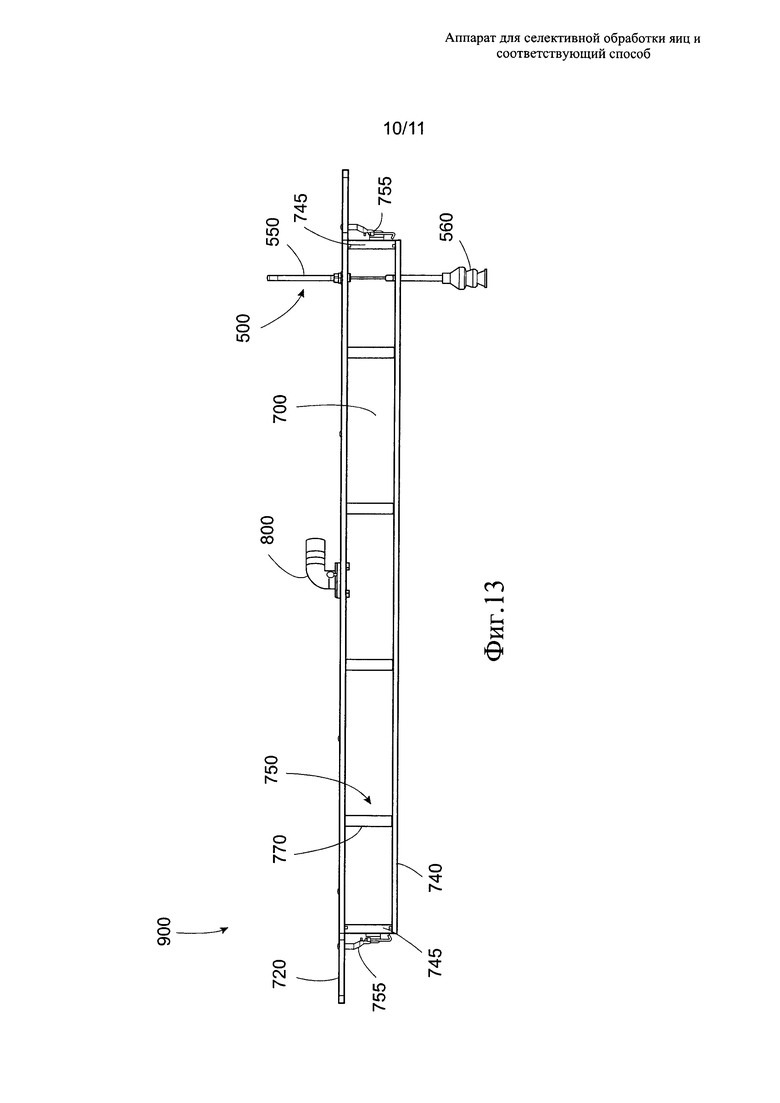
фиг. 13 изображает схематический вид в аксонометрии головки для обработки яиц, содержащей селективно активируемые цилиндры, согласно одному аспекту данного изобретения,
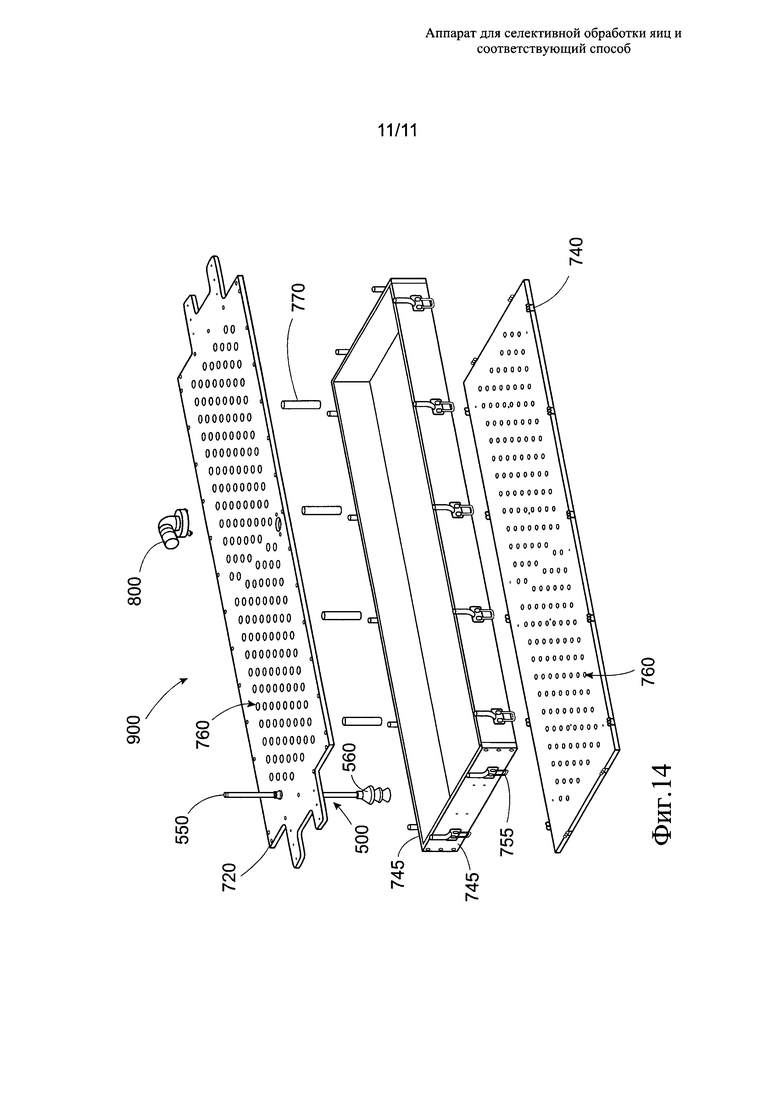
фиг. 14 изображает головку для обработки яиц, показанную на фиг. 13, в разобранном виде.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Ниже приведено более подробное описание различных аспектов данного изобретения со ссылкой на прилагаемые чертежи, на которых показаны некоторые, но не все аспекты. Фактически, данное изобретение может быть реализовано в различных формах и не должно считаться ограниченным аспектами, изложенными в данном описании и приведенными для того, чтобы данное изобретение удовлетворяло требованиям применяемого законодательства. На протяжении всей заявки одинаковые номера позиций относятся к одинаковым элементам.
На фиг. 1 изображен аппарат 100 для обработки яиц. Согласно данному конкретному аспекту аппарат 100 выполнен с возможностью инъектирования и, в некоторых случаях, перемещения яиц в соответствии с различными аспектами данного изобретения. Однако аспекты данного изобретения не ограничены изображенным аппаратом 100, который показан в виде аппарата для инъектирования яиц. В некоторых случаях аппарат 100 может быть выполнен с возможностью как инъектирования, так и перемещения яиц. В других случаях аппарат 100 может быть аппаратом для удаления яиц, выполненным с возможностью удаления яиц, идентифицированных как имеющие определенную классификацию. Кроме того, в других случаях аппарат 100 может представлять собой аппарат для перемещения яиц, используемый для перемещения яиц с поддона 20 закладочного инкубатора к поддону выводного инкубатора (так называемой «выводной корзины»).
Как показано на фиг. 1, аппарат 100 может быть, в частности, предназначен для инъектирования яиц, расположенных в лотке 20, который имеет приемники для индивидуального размещения и удерживания яиц в по существу вертикальном положении. К примерам подходящих промышленных лотков 20 относятся, без ограничения этим, лотки «CHICKMASTER 54», «JAMESWAY 42» и «JAMESWAY 84» (в каждом случае число обозначает количество яиц, размещенных в лотке). При использовании аппарата 100 яйца могут получать инъекции обрабатывающего вещества, когда они расположены под головкой 200 для обработки яиц.
Согласно некоторым аспектам аппарат 100 может содержать раму 110 и конвейерный узел 112, выполненный для перемещения лотков 20 автоматическим образом через аппарат 100 к положению инъектирования. Узел 112 может содержать направляющую рельсовую систему, предназначенную для приема и направления лотков 20 к положению инъектирования. Узел 112 может также содержать соответствующие стопорные элементы, датчики, приводные ремни, бесконечные ленты, двигатели и т.д. для соответствующего индексирования и позиционирования лотков 20 в аппарате 100. В некоторых случаях лотки 20 могут продвигаться через аппарат 100 вручную.
Яйца, введенные в аппарат 100 с помощью лотка 20, могут иметь различные классификационные характеристики. Например, лотки 20 могут содержать яйца, которые могут быть классифицированы исходя из жизнеспособности, содержания патогенных микроорганизмов, генетического анализа или комбинации этих параметров. По существу, яйца пропускаются через систему 115 классификации яиц с созданием классификации для каждого яйца, содержащегося в лотке 20. Такие яйца могут быть классифицированы как жизнеспособные или нежизнеспособные (т.е. яйца, не содержащие жизнеспособного эмбриона согласно данным системы 115), при этом нежизнеспособные яйца могут быть дополнительно классифицированы как, например, бесплодные, тухлые или мертвые яйца. Иллюстративные системы классификации могут осуществлять классификацию яиц с использованием, например, технологий просвечивания (с помощью затемнения, инфракрасного излучения, близкого к инфракрасному излучения и т.д.), технологий количественного анализа или других известных и подходящих способов, процессов или технологий классификации. После классификации яйца могут быть соответственно обработаны с использованием аппарата 100. Под обработкой яиц может подразумеваться инъектирование, удаление, перемещение или их комбинация. Например, в некоторых случаях аппарат 100 может быть выполнен с возможностью инъектирования яйца и удаления этого яйца из лотка 20.
В этом смысле аспекты данного изобретения относятся к способностям аппарата 100 селективно взаимодействовать или контактировать с яйцами, содержащимися в лотках 20, в соответствии с такими классификациями. Таким образом, может быть обеспечена возможность прохождения яиц через один или более аппаратов 100 без контакта. Такая обработка может быть особенно предпочтительна, когда лоток 20 содержит одно или более яиц, в которых возникло давление вследствие развития бактерий. Предотвращение контакта компонентов, связанных с аппаратом 100, с любыми такими яйцами может сократить случаи взрыва яиц («лопанья») или передачу бактериального материала.
Согласно аспектам данного изобретения аппарат 100 для обработки яиц может быть выполнен с возможностью селективного взаимодействия или контакта с яйцами в соответствии с избирательной схемой удерживания. При этом аппарат 100 может быть выполнен с возможностью селективного взаимодействия с яйцами в лотке 20, имеющими различные классификационные характеристики. Например, яйца, с которыми осуществляется взаимодействие (контакт), могут быть идентифицированы как имеющие классификационный статус жизнеспособных (живых) с образованием, таким образом, первой подгруппы яиц, тогда как яйца, с которыми не происходит взаимодействия (контакта), идентифицированы как имеющие классификационный статус нежизнеспособных (неживых) с образованием, таким образом, второй подгруппы яиц, либо первой подгруппы бесплодных (так называемых «пустых») яиц и второй подгруппы всех других яиц в лотке 20, не идентифицированных как бесплодные. По существу, аппарат 100 может быть выполнен с возможностью селективного взаимодействия или контакта с указанными подгруппами яиц, содержащихся в лотке 20, в соответствии с классификационным статусом для каждого яйца. Например, жизнеспособные (живые) яйца могут находиться в состоянии контакта так, что может быть выполнен процесс инъектирования, тогда как нежизнеспособные (неживые) яйца не входят в контакт или не взаимодействуют иным образом с компонентами аппарата 100. В других случаях может осуществляться контакт или взаимодействие с жизнеспособными (живыми) яйцами для их переноса из лотка 20 в выводную корзину, тогда как нежизнеспособные (неживые) яйца не входят в контакт и остаются в лотке 20 с обеспечением их перемещения конвейерным узлом 112 вдоль направления обработки. По существу, аспекты данного изобретения преимущественно способствуют гибкой обработке яиц благодаря селективному взаимодействию с ними согласно классификации.
Как показано на фиг. 1, аппарат 100 может содержать головку 200 для обработки яиц, присоединенную к раме 110 и выполненную с возможностью вертикального перемещения для взаимодействия с яйцами, содержащимися в лотке 20, когда они находятся в положении обработки под головкой 200. Головка 200 может быть приведена в действие пневматическим образом с обеспечением вертикального перемещения для облегчения взаимодействия с яйцами в лотке 20. В некоторых случаях головка 200 может быть опущена и поднята пневматическим образом с помощью передаточного цилиндра (не показан), проточно соединенного с пневматической системой, как известно специалистам в данной области техники, и направляющих валов 130 для направления головки 200. В некоторых случаях головка 200 может быть выполнена с возможностью перемещения в боковом направлении за пределами узла 112 и/или положения обработки.
Головка 200 может содержать обрабатывающие устройства, выполненные с возможностью селективного взаимодействия, соединения или иного контакта с яйцами в лотке 20. Как показано, в частности, на фиг. 3, обрабатывающее устройство может представлять собой инъекционное устройство 300, которое выполнено с возможностью инъектирования обрабатывающего вещества в яйцо и может также использоваться в качестве устройства для взятия проб. К обрабатывающим устройствам могут относиться инъекционное устройство 300, устройство для удаления яиц (фиг. 13), устройство для перемещения яиц (фиг. 13), устройство для взятия проб или объединенное устройство для инъекции и перемещения (фиг. 12). Инъекционные устройства 300 могут содержать соответствующие пневматические компоненты для управления иглой 302 и/или последовательностью инъекционных перфораторов. То есть с помощью пневматических компонентов создается соответствующее давление или вакуум так, что игла и/или перфоратор (используемый для пробития отверстия в яйце перед введением иглы 302) могут быть выдвинуты для прокалывания яйца, а затем втянуты после завершения инъекции обрабатывающего вещества. Как показано на фиг. 2-5, устройства 300 могут содержать впускные клапаны, выполненные с возможностью проточного соединения с пневматическим источником, приводящим в действие инъекционное устройство. Приведение инъекционных устройств в действие может осуществляться в целом или селективно так, что иглы либо всегда выдвинуты из корпуса, либо выдвигаются селективно на основании классификационного статуса, связанного с соответствующим яйцом.
Как показано на фиг. 3-5, головка 200 для обработки яиц может содержать зажимную пластину 220 и подъемную пластину 240. Согласно некоторым аспектам зажимная пластина 220 может быть закреплена относительно головки 200 так, что пластина 220 перемещается только при перемещении головки. Кроме того, пластина 220 может быть выполнена так, что она остается неподвижной во время процесса обработки яиц. Например, при опускании головки 200 до ее самого нижнего положения зажимная пластина может оставаться в этом положении до завершения процесса обработки. Пластина 220 может ограничивать отверстия 222 для размещения инъекционных устройств 300. Размеры устройств 300 обеспечивают возможность их вертикального и осевого перемещения в отверстиях 222 так, что устройства 300 могут «плавать». Это также обеспечивает возможность наклона устройств 300 для нахождения яйца, которое может быть смещено по вертикали от центра в лотке 20. Пластина 220 может использоваться для селективного присоединения, пристегивания или прикрепления иным образом устройств 300 к пластине 200 в различных местоположениях вдоль каждого устройства 300.
Подъемная пластина 240 может работать совместно с зажимной пластиной 220 для содействия функциям селективного взаимодействия или контакта в данном изобретении. Подъемная пластина 240 может быть отнесена от зажимной пластины 220 по существу параллельным образом и выполнена с возможностью перемещения относительно нее, как показано на фиг. 3-5. Пластина 240 может ограничивать отверстия 240 для размещения устройств 300. Каждое устройство 300 может иметь фланец 304 (фиг. 2), который взаимодействует с подъемной пластиной 240 для перемещения устройств 300 по вертикали (по существу перпендикулярно направлению обработки яиц) в обоих направлениях так, что устройства 300 могут подниматься и опускаться независимо от перемещения головки 200. Таким образом, подъемная пластина 240 может использоваться для перемещения устройств 300 в различные положения в отверстиях 222 зажимной пластины 220. Пластина 240 может перемещаться с помощью соответствующих механизмов, таких как пневматические, гидравлические или другие аналогичные средства для перемещения конструкций. Размеры устройств 300 обеспечивают возможность их вертикального и осевого перемещения в отверстиях 242 так, что устройства 300 могут «плавать». Это также обеспечивает возможность наклона устройств 300 для нахождения яйца, которое может быть смещено по вертикали от центра в лотке 20.
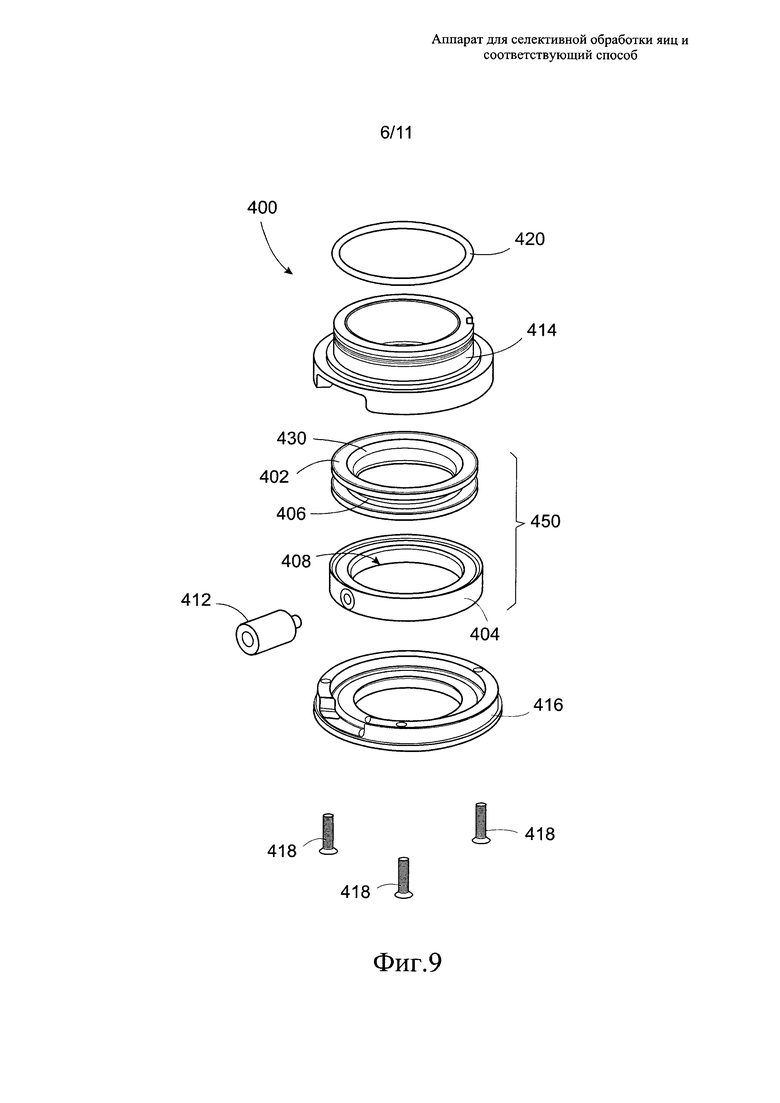
Как показано на фиг. 6-11, часть зажимной пластины 220 может быть образована запирающими устройствами 400, или такие устройства могут быть прикреплены к пластине 220. Устройства 400 выполнены с возможностью неподвижного прикрепления инъекционных устройств 300 к пластине 220. При этом каждое устройство 300 может быть закреплено в различных местоположениях вдоль его продольной оси на пластине 220. Каждое запирающее устройство 400 может быть индивидуально приведено в действие так, что устройства 400 могут управляться по отдельности, индивидуально и селективно.
Согласно одному аспекту запирающее устройство 400 может работать пневматическим образом с обеспечением прикрепления устройства 300 к пластине 220. В некоторых случаях устройство 400 может содержать надувной элемент 450, используемый для прикрепления соответствующего инъекционного устройства 300 к зажимной пластине 220. Элемент 450 может содержать баллон 402, который работает совместно с жестким элементом 404 так, что баллон 402 может надуваться с обеспечением прикрепления соответствующего устройства 300 к пластине 220. При этом баллон 402 может ограничивать открытый канал 406, предназначенный для сопряжения с внутренним каналом 408 элемента 404 с образованием воздушного канала 410. Сжатый воздух может подаваться в канал 410 через соединитель 412, используемый для соединения запирающего устройства 400 и канала 410 с источником сжатого воздуха (не показан). Сжатый воздух надувает баллон 402 и расширяет его внутреннюю стенку 430 в радиально внутреннем направлении с обеспечением возможности зажатия ею соответствующего инъекционного устройства 300, расположенного внутри. Первый и второй элементы 414, 416 корпуса могут действовать совместно с обеспечением удерживания надувного элемента 450 и придания запирающему устройству 400 вида, подходящего для оперативного взаимодействия с пластиной 220, при этом для скрепления первого и второго элементов 414, 416 корпуса друг с другом могут использоваться соответствующие крепежные элементы 418. По меньшей мере часть устройства 400 может быть расположена или установлена внутри отверстий 222 пластины 220 и поддерживаться в этом положении с помощью соответствующих крепежных механизмов. Для содействия позиционированию устройства 400 в отверстии 222 может быть выполнен уплотнительный элемент (например, уплотнительное кольцо) 420. Хотя компоненты надувного элемента 450 и корпуса показаны имеющими по существу кольцевую форму, данное изобретение не ограничено такими конфигурациями. Кроме того, в некоторых случаях баллон 402 может не быть полностью выполнен в виде замкнутого кольца. То есть в некоторых случаях концы баллона 402 могут быть разомкнуты с образованием С-образной формы.
На фиг. 1 и 3-5 проиллюстрирована последовательность операций для иллюстративного аппарата 100 для обработки яиц. В иллюстративном аппарате 100 яйца 5 классифицируют с помощью системы 115 классификации яиц, в которой используется измерение света (просвечивающее устройство) и в которой свет проходит через яйцо и измеряется оптическим датчиком. Яйца 5 могут быть идентифицированы, например, как живые или неживые. Оптические датчики или другой регистрирующий механизм могут быть функционально соединены непосредственно с контроллером 150 (который может представлять собой микропроцессор или другую программируемую или непрограммируемую схему) или с другим контроллером, способным передавать информацию к контроллеру 150 так, что контроллер 150 получает классификационный статус косвенным образом.
Как показано на фиг. 1, конвейерный узел 112 перемещает яйца 5, загруженные в лоток 20, с прохождением системы 115 классификации так, что каждое яйцо 5 проходит через нее с обеспечением возможности генерации данных (классификационного статуса яйца) для каждого яйца 5. Данные, собранные системой 115, могут быть направлены к контроллеру 150 (или другому контроллеру) для обработки и хранения данных, связанных с каждым яйцом 5. Контроллер 150 может быть выполнен с возможностью последующей генерации селективного сигнала удерживания, посылаемого запирающим устройствам 400, с обеспечением независимого прикрепления отдельных инъекционных устройств 300 (или подгрупп инъекционных устройств) к зажимной пластине 220 в различных положениях (контактном или неконтактном) согласно классификационному статусу для каждого яйца на основании данных, собранных системой 115.
Как показано на фиг. 1, лоток 20 яиц может перемещаться к положению инъектирования под головкой 200. В некоторых случаях головка 200 может быть выполнена с возможностью одновременной обработки нескольких лотков 20. Перед расположением лотка (или лотков) 20 под головкой 200 головка 200 может быть опущена до заданного полностью опущенного положения так, что пластина 220 также находится в полностью опущенном и неподвижном положении, как показано на фиг. 3. Однако следует понимать, что в некоторых случаях головка 200 и пластина 220 могут быть закреплены в заданном положении, при этом единственным перемещением, связанным с головкой 200, является перемещение подъемной пластины 240 с помощью соответствующих пневматических средств, гидравлических средств и т.д. На фиг. 3 инъекционные устройства 300а, 300b и 300с находятся в полностью опущенном положении, при этом под ними не расположены яйца и соответствующие запирающие устройства 400 не приведены в действие, так что устройства 300 могут быть втянуты.
На фиг. 4 устройства 300а, 300b и 300с подняты до полностью втянутого положения. На данном этапе информация, касающаяся классификационного статуса для каждого яйца 5 в поступающем лотке 20, передается к запирающим устройствам 400 и/или связанным с ними компонентам так, что устройства 400 могут закрепить инъекционные устройства 300, связанные с неживыми яйцами, в неконтактном положении. Т.е. устройства 400, связанные с неживыми яйцами, подвергаются воздействию давления для надувания элемента 450 вокруг устройства 300b с обеспечением закрепления устройства 300 и предотвращения его дальнейшего опускания. После того как яйца 5 перемещаются под головку 200, как показано на фиг. 5, пластина 240 опускается на максимальное расстояние, так что яйца 5, идентифицированные как живые, входят в контакт с устройствами 300 (контактное положение). Например, на фиг. 5 яйца 5, связанные с инъекционными устройствами 300а и 300с, были идентифицированы как живые, и фактически запирающие устройства 400, связанные с устройствами 300а и 300с, не приводятся в действие, так что устройства 300а и 300с могут быть опущены для обеспечения контакта с соответствующими яйцами 5.
В это время запирающее устройство 400, связанное с устройством 300b, приводится в действие вследствие идентификации связанного с ним яйца 5 как неживого, так что устройство 300b закрепляется в неконтактном положении и подъемная пластина 240 опускается без опускания устройства 300b. Поскольку устройства 300 обладают способностью «плавать», контактное положение может быть различным для яиц разных размеров, как показано на фиг. 5 для устройств 300а и 300с. При достижении устройствами 300а и 300с контактного положения запирающие устройства 400, связанные с ними, приводятся в действие с обеспечением запирания устройств 300а и 300с в положении, предшествующем процессу инъектирования. После осуществления инъектирования головка 200 может быть поднята, а лоток 20 с яйцами выведен из его положения под головкой 200. Затем устройства 400 могут быть высвобождены и пластина 240 поднята так, что устройства 300 готовы для позиционирования. Таким образом, как подробно описано выше, устройства для обработки яиц могут селективно взаимодействовать с яйцами лотка 20 в контактном или неконтактном положении в соответствии с классификацией.
В некоторых случаях, как показано на фиг. 5, игла 302 и/или перфоратор могут быть приведены в действие для каждого инъекционного устройства 300 независимо от классификационного статуса яйца. При этом устройства 300, связанные с неживыми яйцами, должны быть скреплены с зажимной пластиной 220 на заданном расстоянии, обеспечивающем возможность создания зазора между яйцом и иглой при ее максимальном ходе так, что игла 302 не контактирует с яйцом 5. В некоторых случаях устройства 300 могут быть выполнены с возможностью приема классификационного статуса яйца так, что иглы 302 и/или перфораторы также могут приводиться в действие селективно.
Как показано на фиг. 10 и 12, устройство 300 может также содержать вакуумную присоску 380, предназначенную для герметичного охватывания верхней части яйца так, что яйцо может быть поднято при приложении вакуума. Вариант выполнения, изображенный на фиг. 10 и 12, представляет собой объединенное устройство 600 для инъекции и перемещения, в котором яйцо может быть поднято из лотка 20, а затем инъецировано обрабатывающим веществом с помощью иглы 302, которая проходит через центральное отверстие (не показано) в вакуумной присоске 380. В других случаях устройство 600 может сначала выполнять инъектирование яйца, а затем удалять его из лотка 20. Устройство 600 может быть любым способом встроено в селективный механизм, описанный в данном документе, с обеспечением возможности осуществления устройством 600 селективной инъекции и удаления контактным/неконтактным образом.
Согласно другому аспекту данного изобретения, как показано на фиг. 13 и 14, головка 200 может представлять собой головку 900 для удаления яиц, выполненную с возможностью удаления яиц из лотка 20 для их отбраковки или переноса. Головка 200 может приводиться в действие пневматическим образом с обеспечением ее вертикального перемещения для облегчения взаимодействия с яйцами в лотке 20. В некоторых случаях головка 200 может опускаться и подниматься пневматическим образом с помощью передаточного цилиндра 120, проточно соединенного с пневматической системой, как известно специалистам в данной области техники, и направляющих валов 130 для направления головки 200. В некоторых случаях головка 200 может быть выполнена с возможностью перемещения в боковом направлении за пределами конвейерного узла 112 и/или положения обработки.
В некоторых случаях устройства для обработки яиц могут управляться селективным образом с использованием цилиндров с пневматическим управлением. Например, могут иметься перемещающие или удаляющие устройства 500 (для простоты показано только одно), выполненные с возможностью селективного взаимодействия с соответствующими яйцами так, что контакт осуществляется только с яйцами, идентифицированными как первая подгруппа (например, живые или жизнеспособные) яиц, для их удаления или перемещения с лотка 20. В таких случаях вторая подгруппа (например, неживых или нежизнеспособных) яиц может оставаться в лотке 20 без вхождения в контакт с любым из перемещающих/удаляющих устройств 500.
Как показано на фиг. 13, устройство 500 может быть функционально соединено с трубопроводом 700 головки 200. В некоторых случаях устройство 500 может быть проточно соединено с трубопроводом 700 так, что в устройство 500 в целом может подаваться вакуум или отрицательное давление воздуха для подъема яиц, находящихся в контакте с устройством 500, для их удаления из лотка 20. Трубопровод 700 может быть образован с помощью противолежащих пластин 720, 740 и боковых стенок 745, соединенных с созданием камеры 750, которая может быть воздухонепроницаемой для удерживания вакуума. Пластины 720, 740 и стенки 745 могут быть скреплены друг с другом любыми подходящими крепежными средствами, в том числе, например, защелками, зажимами 755, сочленениями, болтами и креплениями. Пластины 720, 740 могут иметь совмещенные отверстия 760 для размещения устройств 500 с прохождением через них. Одна или более распорок 770 могут обеспечивать опорную конструкцию между пластинами 720, 740.
С трубопроводом 700 может быть проточно соединено вакуумирующее устройство 800, обеспечивающее подачу к трубопроводу отрицательного давления воздуха для облегчения удаления яиц из лотка 20 с помощью устройства 500. В некоторых случаях устройство 800 также может быть выполнено с возможностью подачи положительного давления воздуха к трубопроводу 700 для облегчения общего высвобождения всех яиц, находящихся в контакте с устройствами 500, или содействия ему. То есть устройство 800 может быть выполнено с возможностью переключения между подачей отрицательного давления воздуха и положительного давления воздуха к трубопроводу 700 (и всем перемещающим/удаляющим устройствам 500) для достижения желаемого действия. В то время как для высвобождения яиц из устройств 500 является достаточным простое устранение вакуума, для обеспечения высвобождения яиц из устройств 500 подходящим и управляемым образом может быть необходимо приложить по меньшей мере некоторое положительное давление воздуха. Вакуумирующее устройство 800 может быть проточно соединено с трубопроводом 700 при помощи системы труб или других подходящих средств проточного соединения.
Устройство 800 может создавать вакуум с обеспечением присасывания яиц 5 к передающему/удаляющему устройству 500. Трубопровод 700 может подниматься и опускаться с помощью передаточного цилиндра или других средств, например описанных выше, относительно головки для обработки яиц так, что яйца 5 удаляются из лотка 20 и поднимаются от него. После их удаления из лотка 20 яйца 5 могут быть подняты, опущены или высвобождены (селективным или неселективным образом) головкой 200 различными способами, последовательностями действий или этапов в соответствии с заданной схемой обработки, осуществляемой на аппарате 100 для обработки яиц.
Каждое устройство 500 может содержать цилиндр 550 с пневматическим управлением, выполненный с возможностью выдвижения и втягивания подъемного элемента 560 между контактным и неконтактным положениями. Аналогично вышеописанному процессу, каждый цилиндр 550 может принимать сигнал, указывающий на классификационный статус соответствующих яиц в лотке 20, так что цилиндры 550 могут приводиться в действие селективным образом с содействием, таким образом, только взаимодействию или контакту определенных элементов 560 с соответствующими яйцами. Благодаря селективному приведению цилиндров в действие взаимодействие компонентов перемещающего/удаляющего устройства 500 с неживыми или другими нежелательными яйцами может быть успешно исключено.
Согласно одному аспекту данного изобретения головка 200 и связанные с ней компоненты, показанные на фиг. 1-12, могут использоваться в комбинации с головкой 200, показанной на фиг. 13 и 14, для создания системы, содержащей модуль, способный удалять яйца, другой модуль, способный производить инъекции, и еще один модуль, способный перемещать яйца. Таким образом, сначала модуль для удаления яиц может удалить первую подгруппу яиц (например, бесплодных/пустых) из лотка 20 селективным контактным/неконтактным образом так, что контакта с определенными яйцами в лотке 20 не происходит. Затем яйца могут быть перемещены к модулю для инъекции яиц, который может инъецировать вторую подгруппу яиц (например, живых яиц) в соответствии с классификацией без контакта с третьей подгруппой яиц (например, лопнувших), идентифицированных системой 115 классификации. После этого яйца могут быть перемещены к модулю для перемещения яиц, в котором ранее идентифицированная вторая подгруппа яиц перемещается из лотка 20 в выводную корзину, тогда как ранее идентифицированная третья подгруппа яиц остается в лотке 20 нетронутой, так что она перемещается через систему, не входя в контакт с какими-либо компонентами или обрабатывающими устройствами в этой системе. Такая система может успешно уменьшить перенос бактерий между одним лотком и другим при продвижении каждого из них вдоль тракта обработки.
Специалисту в области техники, к которой относится данное изобретение, будут очевидны различные его модификации и другие аспекты, обладающие преимуществами идей, представленных в вышеприведенном описании и на прилагаемых чертежах. Таким образом, следует понимать, что данное изобретение не должно ограничиваться конкретными описанными аспектами и что модификации и другие аспекты находятся в рамках объема прилагаемой формулы изобретения. Несмотря на то что в данном документе используются специальные термины, они применяются исключительно в широком и описательном смысле и не служат для ограничения.


Группа изобретений относится к птицеводству, а именно к системам для инъектирования птичьих яиц. Аппарат для инъектирования яиц содержит головку для обработки яиц, инъекционные устройства, которые функционально соединены с головкой для обработки яиц с возможностью перемещения при помощи головки в вертикальном направлении и каждое из которых имеет конец, предназначенный для контакта с птичьим яйцом. Каждое инъекционное устройство выполнено с возможностью его селективного удерживания в неконтактном или контактном положении во время процесса обработки так, что первая подгруппа инъекционных устройств находится в неконтактном положении при одновременном нахождении второй подгруппы инъекционных устройств в контактном положении для инъекции обрабатывающего вещества. Способ селективного инъектирования птичьих яиц включает втягивание инъекционных устройств, совмещенных с птичьими яйцами; закрепление первой подгруппы инъекционных устройств в неконтактном положении; выдвижение второй подгруппы инъекционных устройств с обеспечением их взаимодействия с соответствующими птичьими яйцами; закрепление второй подгруппы инъекционных устройств в контактном положении и выполнение инъекции обрабатывающего вещества в птичьи яйца, взаимодействующие со второй подгруппой инъекционных устройств. Обеспечивается селективное инъектирование птичьих яиц, управление взаимодействием с нежелательными яйцами. 2 н. и 10 з.п. ф-лы, 14 ил.
1. Аппарат для инъектирования яиц, содержащий
головку для обработки яиц,
инъекционные устройства, которые функционально соединены с головкой для обработки яиц с возможностью перемещения при помощи головки в по существу вертикальном направлении и каждое из которых имеет конец, предназначенный для контакта с птичьим яйцом,
при этом каждое инъекционное устройство выполнено с возможностью его селективного удерживания в неконтактном положении или контактном положении во время процесса обработки так, что первая подгруппа инъекционных устройств находится в неконтактном положении при одновременном нахождении второй подгруппы инъекционных устройств в контактном положении для инъекции обрабатывающего вещества.
2. Аппарат по п. 1, в котором головка для обработки яиц содержит зажимную пластину, ограничивающую отверстия для размещения инъекционных устройств и выполненную с возможностью селективного закрепления каждого инъекционного устройства в неконтактном положении или контактном положении.
3. Аппарат по п. 2, содержащий кольцевые запирающие устройства, предназначенные для установки внутри отверстий зажимной пластины, причем каждое запирающее устройство выполнено с возможностью индивидуального закрепления соответствующего инъекционного устройства в неконтактном положении или контактном положении во время процесса обработки.
4. Аппарат по п. 3, в котором каждое запирающее устройство содержит пневматический клапан, соединенный с системой подачи воздуха под положительным давлением и предназначенный для облегчения запирания обрабатывающих устройств пневматическим образом.
5. Аппарат по п. 4, в котором каждое запирающее устройство содержит жесткий элемент, работающий совместно с баллоном для образования воздушного канала так, что баллон обладает способностью надуваться пневматическим образом для закрепления запирающих устройств в неконтактном и контактном положениях.
6. Аппарат по п. 1, содержащий систему классификации, которая предназначена для классифицирования птичьего яйца как подлежащего взаимодействию или неподлежащего взаимодействию и непосредственно или опосредованно соединена с инъекционными устройствами для подачи команды на установку каждого инъекционного устройства в неконтактное или контактное положение во время процесса обработки.
7. Способ селективного инъектирования птичьих яиц, включающий
втягивание инъекционных устройств, совмещенных с птичьими яйцами,
закрепление первой подгруппы инъекционных устройств в неконтактном положении,
выдвижение второй подгруппы инъекционных устройств с обеспечением их взаимодействия с соответствующими птичьими яйцами, совмещенными с ними,
закрепление второй подгруппы инъекционных устройств в контактном положении и выполнение инъекции обрабатывающего вещества в птичьи яйца, взаимодействующие со второй подгруппой инъекционных устройств.
8. Способ по п. 7, в котором на этапах закрепления первой и второй подгрупп инъекционных устройств селективно закрепляют указанные подгруппы с помощью неподвижной зажимной пластины, предназначенной для селективного удерживания каждого обрабатывающего устройства в неконтактном положении или контактном положении и ограничивающей отверстия для размещения обрабатывающих устройств.
9. Способ по п. 8, в котором при селективном закреплении первой и второй подгрупп селективно закрепляют указанные подгруппы с помощью кольцевых запирающих устройств, предназначенных для установки внутри отверстий зажимной пластины, причем каждое запирающее устройство выполнено с возможностью индивидуального закрепления соответствующего обрабатывающего устройства в неконтактном положении или контактном положении.
10. Способ по п. 9, в котором при селективном закреплении первой и второй подгрупп с помощью кольцевых запирающих устройств пневматически надувают баллон каждого запирающего устройства с обеспечением селективного закрепления запирающих устройств в неконтактном или контактном положении.
11. Способ по п. 10, в котором при пневматическом надувании баллона каждого запирающего устройства создают давление в воздушном канале, образованном в результате взаимодействия баллона с жестким элементом.
12. Способ по п. 9, в котором выполняют этап классифицирования каждого птичьего яйца как подлежащего взаимодействию или неподлежащего взаимодействию и этап передачи данных о классификации каждого птичьего яйца соответствующему запирающему устройству для выдачи команды на установку каждого инъекционного устройства в неконтактное или контактное положение.
| СПОСОБ ОБРАБОТКИ ЯИЦ (ВАРИАНТЫ) | 2002 |
|
RU2264708C2 |
| US 6149375 A, 21.11.2000 | |||
| US 5136979 A, 11.08.1992 | |||
| US 6240877 B1, 05.06.2001. | |||

