Область техники изобретения
[001] Настоящее изобретение относится в целом к системам для гигиены полости рта и, в частности, к системам для гигиены полости рта и способу оказания содействия соблюдению схемы гигиены полости рта.
Предпосылки создания изобретения
[002] Соблюдение правильной технологии и частоты действий по осуществлению гигиены полости рта, включая чистку с помощью щетки и чистку с помощью зубной нити, является необходимым для здоровых зубов. Зубной налет, бактериальная биопленка, образуется на зубах и способствует возникновению кариеса зубов, гингивита и других проблем с зубами. Однако зубной налет можно удалять путем чистки с помощью щетки по меньшей мере один раз в день в течение двух минут и предпочтительно два раза в день, препятствуя кариесу зубов или уменьшая его.
[003] Однако дети и подростки особенно плохо соблюдают схему гигиены полости рта. Например, многие секции зубов часто исчезают после развития плохих привычек. Согласно CDC (центр по контролю и профилактике заболеваний), несмотря на то, что кариес зубов можно предотвратить, он является наиболее распространенным хроническим заболеванием у детей возрастом 6—11 (25%) и подростков возрастом от 12 до 19 лет (59%). Также у 28% взрослых людей возрастом от 35 до 44 есть нелеченый кариес зубов. Исследования показывают, что дети постоянно пропускают одни и те же области во время чистки с помощью щетки, что приводит к отдельным наслоениям зубного налета на определенных зубах. Соответственно более важным является эффективность чистки зубов с помощью щетки, чем продолжительность чистки с помощью щетки. Кроме того, было показано, что обучение уходу за зубами обычно оказывает лишь небольшое и временное влияние на накопление зубного налета. Согласно Американской ассоциации стоматологов, соблюдение надлежащих схем гигиены полости рта является достаточно слабым. Например, только 49% мужчин и 57% женщин чистят с помощью щетки свои зубы два раза в день.
[004] Соответственно существует необходимость в системах для гигиены полости рта и способах, которые оказывают содействие соблюдению пользователем рекомендованных стоматологом схем гигиены для уменьшения полостей, заболевания десен и других осложнений зубов вследствие недостатка чистки с помощью щетки. Настоящее изобретение направлено на удовлетворение этих потребностей и других проблем.
Краткое описание настоящего изобретения
[005] Согласно некоторым вариантам реализации настоящего изобретения способ оказания содействия соблюдению схемы гигиены полости рта включает отображение на устройстве отображения представления по меньшей мере части ряда зубов пользователя. Способ также включает наложение знака на представление так, что знак связан с первой секцией представления. В ответ на определение посредством по меньшей мере одного из одного или более процессоров, что головка устройства для гигиены полости рта расположена непосредственно возле первой секции ряда зубов, которая соответствует первой секции представления, в течение по меньшей мере предопределенного количества времени, знак удаляется с устройства отображения.
[006] Согласно некоторым вариантам реализации настоящего изобретения система для гигиены полости рта содержит устройство для гигиены полости рта, датчик, устройство отображения, один или более процессоров и запоминающее устройство. Устройство для гигиены полости рта содержит рукоятку и головку. Запоминающее устройство хранит команды, которые при исполнении по меньшей мере одним из одного или более процессоров, обеспечивают отображение системой для гигиены полости рта на устройстве отображения представления по меньшей мере части ряда зубов пользователя. Команды также обеспечивают наложение системой для гигиены полости рта знака на представление так, что знак связан с первой секцией представления. В ответ на определение посредством по меньшей мере одного из одного или более процессоров, что головка устройства для гигиены полости рта расположена непосредственно возле первой секции ряда зубов, которая соответствует первой секции представления, в течение по меньшей мере предопределенного количества времени, знак удаляется с дисплея.
Краткое описание чертежей
[007] На фиг. 1 представлен схематический вид примера системы для гигиены полости рта;
[008] на фиг. 2 представлено схематическое изображение примера устройства для гигиены полости рта и иллюстративной базовой станции системы по фиг. 1;
[009] на фиг. 3A представлен вид в перспективе устройства для гигиены полости рта и головки согласно некоторым вариантам реализации настоящего изобретения;
[0010] на фиг. 3B представлен вид в перспективе примера рукоятки устройства для гигиены полости рта;
[0011] на фиг. 3C—3E представлены виды в перспективе иллюстративных заменяемых головок, которые могут быть прикреплены к контактной поверхности для головки;
[0012] на фиг. 4 представлена схема последовательных операций, иллюстрирующая пример процесса, используемого для записи данных по чистке с помощью щетки или других данных по гигиене и обеспечения сигнала обратной связи пользователю согласно некоторым вариантам реализации настоящего изобретения;
[0013] на фиг. 5 представлена схема, иллюстрирующая пример устройства для гигиены полости рта и базовой станции с генератором магнитного поля в базовой станции или другим связанным устройством;
[0014] на фиг. 6A представлен вид в перспективе, иллюстрирующий пример устройства для гигиены полости рта с видимыми рисунками согласно некоторым вариантам реализации настоящего изобретения;
[0015] на фиг. 6B представлен вид в перспективе, иллюстрирующий пример головки устройства для гигиены полости рта с видимыми рисунками согласно некоторым вариантам реализации настоящего изобретения;
[0016] на фиг. 7 представлен вид в перспективе, иллюстрирующий пример системы, которая идентифицирует положение устройства для гигиены полости рта визуально без рисунка;
[0017] на фиг. 8A представлен вид в перспективе, иллюстрирующий пример рукоятки зубной щетки со вставкой;
[0018] на фиг. 8B представлен вид в перспективе, иллюстрирующий пример зубной щетки с извлеченной вставкой;
[0019] на фиг. 8C представлен вид в перспективе, иллюстрирующий пример вставки, которая содержит батарейку и электронные устройства для зубной щетки;
[0020] на фиг. 9A представлен вид спереди, иллюстрирующий пример дисплея мобильного устройства с обратной связью во время чистки с помощью щетки;
[0021] на фиг. 9B представлен вид спереди, иллюстрирующий пример дисплея мобильного устройства с обратной связью во время чистки с помощью щетки;
[0022] на фиг. 10 представлена схематическая иллюстрация системы для гигиены полости рта согласно некоторым вариантам реализации настоящего изобретения;
[0023] на фиг. 11A представлен вид спереди устройства отображения системы для гигиены полости рта по фиг. 10;
[0024] на фиг. 11B представлен другой вид спереди устройства отображения системы для гигиены полости рта по фиг. 10;
[0025] на фиг. 12 представлена схематическая иллюстрация способа работы системы для гигиены полости рта по фиг. 10;
[0026] на фиг. 13A представлен вид спереди устройства отображения системы для гигиены полости рта согласно некоторым вариантам реализации настоящего изобретения; и
[0027] на фиг. 13B представлен вид спереди устройства для гигиены полости рта в трехмерном объемном пространстве.
Подробное описание
[0028] На фиг. 1 проиллюстрирован общий вид системы 100 отслеживания устройства для гигиены полости рта и обеспечения сигнала обратной связи, которая содержит: устройство 1 для гигиены полости рта, оснащенное датчиками, базовую станцию 2 для приема и зарядки устройства 1 для гигиены полости рта, мобильное устройство 30, которое беспроводным образом принимает/отправляет данные, POA 8 (переносимый объектный адаптер) для назначенной линии связи, сервер 4 и сеть 3 для передачи информации с сервера или между другими различными компонентами системы 100.
Связь для передачи данных
[0029] Устройство 1 для гигиены полости рта может иметь антенну 5 и средство в виде приемопередатчика для радиосвязи с совместимой комплементарной антенной 5 и средством в виде приемопередатчика базовой станции 2 по радиолинии 31. Линия 31 радиосвязи может представлять собой, например, WiFi, или GSM, или Bluetooth, или другие производные, или другие частные протоколы. Дополнительно один или более оптических датчиков 9 могут осуществлять связь с мобильным телефоном 30, базовой станцией 2, сервером 4 или другим связанным вычислительным устройством, как раскрыто в настоящем документе.
[0030] В других вариантах осуществления антенны и средство в виде приемопередатчика заменены или реализуются посредством проводных соединений или соединителей для обеспечения возможности обмена информацией между устройством 1 для гигиены полости рта, оптическим датчиком/камерой 9 и/или базовой станцией 2. Проводные соединители могут также обеспечивать подачу электроэнергии от базовой станции на устройство 1 для гигиены полости рта для повторной зарядки перезаряжаемого электрического источника питания последнего. В других вариантах осуществления подача электроэнергии от базовой станции на устройство 1 для гигиены полости рта или устройство 9 в виде оптического датчика обеспечивается посредством схемы электромагнитной индукции.
[0031] Базовая станция 2 может получать питание через шнур питания. Базовая станция 2 может альтернативно получать питание от перезаряжаемой батарейки, которая заряжается время от времени от зарядного устройства батареек, получающего питание от сети подачи питания. Базовая станция 2 имеет приемный паз для физического поддерживания и хранения зубной щетки, когда она не используется пользователем.
[0032] Базовая станция 2 и/или отдельное устройство 9 в виде оптического датчика содержит схему обмена данными для обмена данными с сетью 3, например, Интернет. Данные могут быть переданы с использованием линии 31 радиосвязи, как проиллюстрировано на фиг. 1, посредством антенны 5 базовой станции 2 и антенны 5 назначенного оборудования 8 связи или POA, подключенного к сети 3. В других вариантах осуществления передача данных между базовой станцией 2 и сетью 3 выполняется через проводную линию, например, ADSL.
[0033] Антенна 5 и средство в виде приемопередатчика устройства 1 для гигиены полости рта и/или камера/оптическое воспринимающее устройство 9 также совместимы со средством радиосвязи мобильного устройства 30 по радиолинии 31. Линия 31 радиосвязи представляет собой, например, WiFi, или GSM, или Bluetooth, или другие производные, или другие подходящие протоколы. В некоторых вариантах осуществления радиолинии 31 представляют собой близкодействующие локальные линии радиосвязи или радиолинии 35, наподобие тех, что используется в системах сотовых или других мобильных телефонов (GSM и производные, например).
[0034] Мобильное устройство 30 также выполнено с возможно обмена данными посредством своих схем радиосвязи по радиолинии 31 с помощью назначенного оборудования 8 связи или POA, по сети 3. Дополнительно или альтернативно мобильное устройство 30 выполнено с возможностью обмена данными с использованием радиолинии 35 непосредственно по сети 3.
[0035] Сервер 4 подключен к сети 3 посредством любого подходящего средства. Сервер 4 определяется в широком смысле как содержащий вычислительные устройства, выполненные с возможностью хранения и вычисления операций, например, посредством «облака» в вычислительной сети. Сервер 4 может содержать устройства хранения, например память, накопители на жестком диске, флеш-память или другие устройства хранения, и содержит вычислительное средство под управлением программы. Для передачи данных схема управления устройством для гигиены полости рта использует предопределенный адрес сервера 4 сети 3. Этот предопределенный адрес может храниться изначально в устройстве 1 для гигиены полости рта и/или обновляться позже по сети 3. Передача данных между устройством 1 для гигиены полости рта и сервером 4 может быть выполнена: a) каждый раз, когда устройство 1 для гигиены полости рта возвращают на базовую станцию 2, в пакетной конфигурации, b) по указанию пользователя или сервера 4, например, посредством действия пользователя, инициирующего передачу с использованием интерфейса мобильного устройства 30 или веб-страницы, обращающейся к серверу 4, или c) в режиме реального времени, когда обнаружены действия устройства 1 для гигиены полости рта, или d) когда устройство 1 для гигиены полости рта извлечено из базовой станции 2, или e) с другими подходящими интервалами.
Разработка схемы системы и архитектура сети
[0036] Как проиллюстрировано на фиг. 2, устройство 1 для гигиены полости рта может содержать датчик 10 давления и по меньшей мере один датчик 11. Датчик 11, показанный на фиг. 2, может относиться к любому подходящему типу датчика. Датчик 10 давления обнаруживает усилие, приложенное при чистке с помощью щетки, устройства 1 для гигиены полости рта, когда пользователь надавливает щетинками на свои зубы. Датчик 11 может представлять собой датчик движения для обнаружения движения на любой из ортогональных осей или всех трех из них устройства 1 для гигиены полости рта, или датчик движения может быть выполнен с возможностью определения ускорений или других характеристик движения во всех трех осях. Сигналы, выводимые датчиками, обрабатываются схемами 12 предварительного формирования сигнала. Примеры предварительного формирования сигнала включают: фильтрацию частоты и шума, усиление, преобразование, цифровую обработку сигналов и другие технологии оптимизации обнаруженных сигналов для анализа.
[0037] В других вариантах осуществления устройство 1 для гигиены полости рта может не содержать электронные устройства и может представлять собой стандартную зубную щетку. В таких вариантах осуществления отдельный оптический датчик/камера 9 может выполнять задачи отслеживания движения устройства 1 для гигиены полости рта.
[0038] Обработанные сигналы или исходные данные от датчиков затем сохраняются в памяти 14, как определено системой 13 управления, которая может представлять собой цифровой сигнальный процессор, микроконтроллер или другой обрабатывающий компонент, и при этом операции управляются программой 15. Память 14 может быть включена в устройство 1 для гигиены полости рта, или на сервер 4, или другой компонент системы 100. Программа 15 может обновляться посредством схемы 16 сопряжения устройства 1 для гигиены полости рта, модема для радиосвязи и своей антенны 5 (и/или соединителя в случае контактного/проводного сопряжения) или других интерфейсов устройства 1 для гигиены полости рта. В более общем смысле схема 16 сопряжения устройства для гигиены полости рта обеспечивает возможность обмена информацией между устройством 1 для гигиены полости рта, устройством 9 в виде оптического датчика и базовой станцией 2, когда установлена радиолиния 31 (и/или соединители зубной щетки и базовой станции сопряжены вместе). Устройство 1 для гигиены полости рта может содержать схему подачи питания для питания датчиков и схем устройства 1 для гигиены полости рта, и оно может содержать перезаряжаемый электрический источник 17 питания.
[0039] Базовая станция 2 может содержать схему 20 сопряжения базовой станции, модем для радиосвязи и антенну 5 (и/или соединитель) для обмена информацией по линии 31. Кроме того, схема 20 сопряжения базовой станции выполнена с возможностью установления радиолинии 31 с назначенным оборудованием 8 связи для осуществления связи с сетью 3. Базовая станция 2 может использовать преобразователь 22 питания, который регулируется 21 для обеспечения надлежащего напряжения и тока на схемы базовой станции. Могут быть предусмотрены электрические соединители (не проиллюстрированы) для подачи зарядного тока в устройство 1 для гигиены полости рта от базовой станции 2. В некоторых вариантах осуществления базовая станция 2 может содержать схему перезарядки для перезарядки батарейки или блока питания зубной щетки путем индуцированного заряда или прямого электрического соединения.
[0040] Базовая станция 2, оптическое воспринимающее устройство 9 или другое отдельное электронное устройство могут также содержать передатчик 110 магнитного поля, излучающий магнитное поле, которое может восприниматься связанным магнитометром или другим датчиком магнитного поля. Передатчик 110 магнитного поля может быть обеспечен путем использования схем зарядки или других схем, которые уже существуют в базовой станции 2 или другом электронном устройстве. Например, базовая станция 2 может иметь катушку перезарядки, которая может также служить в качестве передатчика 110 магнитного поля. Катушка перезарядки может быть зафиксирована в известной ориентации для создания магнитного пола известной напряженности и ориентации полярности. В некоторых вариантах осуществления базовая станция 2 может содержать катушку для перезарядки, которая генерирует магнитное поле с полярной осью, размещенной в горизонтальной или вертикальной плоскости. В некоторых вариантах осуществления она может представлять собой передатчик 110 магнитного поля с одной осью, такой как, в данном случае, катушка для перезарядки с одной осью. В других вариантах осуществления передатчики 110 магнитного поля с 2 или 3 осями могут быть включены в базовую станцию 2. Это преимущественно обеспечит фиксированное магнитное поле (фиксированные магнитные поля) известной ориентации, таким образом магнитометр (датчик 11) на устройстве 1 для гигиены полости рта сможет воспринимать напряженность и полярность магнитного пола (магнитных полей) для предоставления информации, относящейся к положению и ориентации устройства 1 для гигиены полости рта, или относительные изменения в положении и ориентации.
[0041] В некоторых вариантах осуществления базовая станция 2 или другое электронное устройство, отделенное от устройства 1 для гигиены полости рта, может также содержать камеру 9, которая может обнаруживать видимые рисунки на устройстве 1 для гигиены полости рта. Камера 9 может представлять собой любую подходящую камеру, которая может обнаруживать видимый рисунок на устройстве 1 для гигиены полости рта. Например, камеры, которыми оснащены мобильные телефоны, являются подходящими. В других вариантах осуществления может применяться независимая камера или оптическое воспринимающее устройство 9, отдельный штатив камеры для мобильного телефона, подключенное зеркало или другая камера или устройство формирования изображения.
[0042] В некоторых вариантах осуществления базовая станция 2 отключена, и ее схемами управляет контроллер 13 устройства 1 для гигиены полости рта, когда они сообщаются друг с другом, в частности когда линия 31 относится к проводному/контактному типу с соединителями. В варианте осуществления, представленном на фиг. 2, базовая станция имеет систему 19 управления, которая управляет ее операциями.
[0043] Назначенное оборудование 8 связи может содержать схему 27 радиомодема и надлежащие электронные устройства для осуществления связи с сетью 3. Назначенное оборудование 8 связи выполнено с возможностью установления радиолинии 31 с базовой станцией 2 и/или радиолинии 31 с мобильным устройством.
[0044] Мобильное устройство 30 содержит по меньшей мере радиомодем 26 для установления радиолинии 31. Операциями мобильного устройства 30 управляет система 25 управления, например, центральный процессор или µC, и программа 15. Мобильное устройство 30 содержит средство вывода, такое как экран отображения, и средство ввода, такое как виртуальная или физическая клавиатура. Предпочтительно средства ввода и вывода мобильного устройства 30 используются в системе для ввода информации и отображения информации, а именно результатов вычислений, выполненных сервером. Мобильное устройство 30 может также содержать камеру 9, которая выполнена с возможностью обнаружения видимых рисунков, предусмотренных на устройстве для гигиены полости рта, для обнаружения перемещения.
[0045] Программа вычислительного средства сервера 4 обеспечивает возможность сохранения сигналов, принятых с устройства 1 для гигиены полости рта. Дополнительно сервер 4 может анализировать данные с датчиков для создания сигнала обратной связи и мотивационных данных, относящихся к эффективности пользователя в чистке с помощью щетки своих зубов. Эти результаты могут быть доступны пользователю на веб-странице, размещенной сервером 4, или переданы на другой веб-сервер для хостинга. В другом варианте осуществления предыдущие операции и вычисления выполняются полностью или частично в мобильном устройстве 30, при этом сервер 4 используется для общего отслеживания.
[0046] Следует сначала понимать, что настоящее изобретение в данном документе может быть реализовано с помощью аппаратного обеспечения и/или программного обеспечения любого типа и может представлять собой предварительно запрограммированное вычислительное устройство общего назначения. Например, система может быть реализована с использованием сервера, персонального компьютера, портативного компьютера, тонкого клиента или любого подходящего устройства или устройств. Настоящее изобретение и/или его компоненты могут представлять собой одно устройство в одном местоположении или несколько устройств в одном или нескольких местоположениях, которые соединены вместе с помощью любых подходящих протоколов связи по любому средству связи, такому как электрический кабель, оптоволоконный кабель, или беспроводным образом.
[0047] Следует также отметить, что настоящее изобретение проиллюстрировано и описано в настоящем документе как имеющее несколько модулей, которые выполняют конкретные функции. Следует понимать, что эти модули лишь схематически проиллюстрированы на основе их функции исключительно для наглядности и необязательно представляют конкретное аппаратное обеспечение или программное обеспечение. В связи с этим, эти модули могут представлять собой аппаратное обеспечение и/или программное обеспечение, реализуемое для существенного выполнения конкретных описанных функций. Более того, модули могут быть объединены вместе в рамках настоящего изобретения или разделены на дополнительные модули на основе конкретной желаемой функции. Таким образом, описание не следует толковать как ограничивающее настоящее изобретение, а лишь следует понимать, что в нем иллюстрируется его один иллюстративный вариант реализации.
[0048] Вычислительная система может содержать клиенты и серверы. Клиент и сервер обычно удалены друг от друга и, как правило, взаимодействуют по сети связи. Отношение клиента и сервера возникает за счет компьютерных программ, работающих на соответствующих компьютерах и имеющих между собой отношение клиент-сервер. В некоторых вариантах реализации сервер передает данные (например, HTML-страницу) на устройство-клиент (например, в целях отображения данных пользователю и приема вводимых данных от пользователя, взаимодействующего с устройством-клиентом). Данные, сгенерированные на устройстве-клиенте (например, результат взаимодействия пользователя), могут быть приняты с устройства-клиента на сервере.
[0049] Варианты реализации настоящего изобретения, описанные в настоящем описании, могут быть реализованы в вычислительной системе, которая содержит внутренний компонент, например, в качестве сервера данных, или которая содержит компонент промежуточного программного обеспечения, например, сервер приложений, или которая содержит внешний компонент, например, клиентский компьютер с графическим интерфейсом пользователя или веб-браузером, через который пользователь может взаимодействовать с вариантом реализации настоящего изобретения, описанного в настоящем описании, или любую комбинацию из одного или более таких внутренних компонентов, компонентов промежуточного программного обеспечения или внешних компонентов. Компоненты системы могут быть взаимосвязаны по какой-либо форме или среде цифровой передачи данных, например, сетью связи. Примеры сетей связи включают локальную вычислительную сеть («LAN») и глобальную вычислительную сеть («WAN»), глобальную международную компьютерную сеть (например, Интернет) и одноранговые сети (например, индивидуализированные одноранговые сети).
[0050] Варианты реализации настоящего изобретения и операции, описанные в настоящем описании, могут быть реализованы в цифровой электронной схеме или в компьютерном программном обеспечении, программно-аппаратном обеспечении или аппаратном обеспечении, включая структуры, раскрытые в настоящем описании и их структурные эквиваленты, или в комбинациях одного или более из них. Варианты реализации настоящего изобретения, описанные в настоящем описании, могут быть реализованы в виде одной или более компьютерных программ, т. е. одного или более модулей команд компьютерных программ, закодированных на компьютерном носителе данных для исполнения прибором обработки данных или для управления его работой. Альтернативно или дополнительно команды программы могут быть закодированы в искусственно генерируемом распространяемом сигнале, например, в генерируемом машиной электрическом, оптическом или электромагнитном сигнале, который генерируется для кодирования информации для передачи на подходящий прибор в виде приемника для исполнения прибором обработки данных. Компьютерный носитель данных может представлять собой машиночитаемое устройство хранения, машиночитаемый запоминающий носитель, массив или устройство памяти со случайным или постоянным доступом или комбинацию из одного или более из них или может быть включен в них. Более того, тогда как компьютерный носитель данных не является пропущенным сигналом, компьютерный носитель данных может быть источником или пунктом назначения команд компьютерных программ, закодированных в искусственно сгенерированном сигнале. Компьютерный носитель данных может также представлять собой один или более отдельных физических компонентов или носителей (например, несколько компакт-дисков, дисков или других устройств хранения) или быть включен в них.
[0051] Операции, описанные в настоящем описании, могут быть реализованы в качестве операций, выполняемых «прибором обработки данных» в отношении данных, хранящихся на одном или более машиночитаемых устройствах хранения или принятых с других источников.
[0052] Термин «прибор обработки данных» охватывает все типы приборов, устройств и машин для обработки данных, включая в качестве примера программируемый процессор, компьютер, систему на микросхеме, или несколько из перечисленного, или их комбинации. Прибор может содержать логическую схему специального назначения, например, FPGA (программируемую вентильную матрицу) или ASIC (специализированную интегральную схему). Прибор может также содержать, в дополнение к аппаратному обеспечению, код, который создает среду выполнения для рассматриваемой компьютерной программы, например код, который является составной частью программно-аппаратного обеспечения процессора, набора протоколов, системы управления базами данных, операционной системы, межплатформенной среды выполнения, виртуальной машины или комбинации одного или более из них. Прибор и среда выполнения могут реализовывать различные инфраструктуры разных вычислительных моделей, такие как веб-службы, инфраструктуры распределенных вычислений и инфраструктуры grid-вычислений.
[0053] Компьютерная программа (также известная как программа, программное обеспечение, программное приложение, скрипт или код) может быть написана на любом языке программирования, включая компилируемый или интерпретируемый языки, декларативные или процедурные языки, и она может быть развернута в любой форме, в том числе в виде отдельной программы или в виде модуля, компонента, подпрограммы, объекта или другой единицы, подходящей для использования в вычислительной среде. Компьютерная программа может, но не обязательно, соответствовать файлу в файловой системе. Программа может храниться в части файла, который содержится в других программах или данных (например, одном или более скриптах, хранящихся в документе с определенным языком разметки), в одном файле, назначенном рассматриваемой программе или в нескольких координированных файлах (например, файлах, которые хранят один или более модулей, подпрограмм или части кода). Компьютерная программа может быть использована так, чтобы быть исполненной на одном компьютере или на нескольких компьютерах, которые размещены в одном месте или распределены по нескольким местам и взаимосвязаны посредством сети связи.
[0054] Процессы и логические потоки, описанные в настоящем описании, могут быть выполнены одним или более программируемыми процессорами, исполняющими одну или более компьютерных программ для выполнения действий путем работы над входящими данными и генерирования результата. Процессы и логические потоки могут также быть выполнены посредством, и прибор может также быть реализован в качестве, логической схемы специального назначения, например, FPGA (программируемой вентильной матрицы) или ASIC (специализированной интегральной схемы).
[0055] Процессы, подходящие для исполнения компьютерной программы, содержат, в качестве примера, микропроцессоры как обычного, так и специального назначения и любой один или более процессоров любого типа цифрового компьютера. Обычно процессор принимает команды и данные из постоянной памяти или оперативной памяти или из обоих из них. Ключевыми элементами компьютера являются процессор для выполнения действий в соответствии с командами и одно или более запоминающих устройств для сохранения команд и данных. Для приема данных от или передачи данных на, или и того, и другого, компьютер обычно также содержит одно или более устройств массовой памяти для хранения данных, например, магнитные, магнитооптические диски или оптические диски, или функционально соединен с ними. Однако компьютер не обязательно должен содержать такие устройства. Более того, компьютер может быть встроен в другое устройство, например, мобильный телефон, персональный цифровой ассистент (PDA), мобильный аудио- или видеоплеер, игровую приставку, приемник системы глобального позиционирования (GPS) или портативное устройство хранения (например, флеш-накопитель универсальной последовательной шины (USB)) и тому подобное. Устройства, подходящие для хранения команд компьютерных программ и данных включают все формы энергонезависимой памяти, устройств мультимедиа и запоминающих устройств, включая в качестве примера полупроводниковые запоминающие устройства, например, EPROM, EEPROM и запоминающие флеш-устройства; магнитные диски, например, внутренние жесткие диски или съемные диски; магнитооптические диски; и CD- и DVD-диски. Процессор и память могут быть добавлены или включены в логическую схему специального назначения.
Конструкция устройства для гигиены полости рта
[0056] Как проиллюстрировано на фиг. 3A—3C, устройство 1 для гигиены полости рта может содержать рукоятку 40 и головку 42, которая может быть соединена с возможностью разъединения с рукояткой 40. Рукоятка 40 может содержать двигатель, который механически соединен с головкой 42 и при активации вибрирует или перемещает головку 42 таким образом, чтобы чистить зубы пользователя, когда она находится во рту. Рукоятка 40 содержит интерфейс 46 для головки, который с возможностью снятия прикрепляет разные головки 42 к рукоятке 40. Интерфейс 40 для головки содержит выводы 48 для передачи обоих из данных и энергии на разные головки 42. Например, определенные головки 42 могут содержать датчики, которые требуют передачи энергии и данных, и следовательно энергия может направляться от источника питания рукоятки 40 к головке 42 через выводы 48, которые образуют соединение с головкой 42 в интерфейсе 46 для головки. Могут иметься разные количества выводов 48, которые образуют соединение на интерфейсе 46 для головки, например, может существовать два вывода 48 для энергии и два вывода 48 для данных, три вывода 48 для энергии, три вывода 48 для данных и другие разные количества выводов. В некоторых вариантах осуществления интерфейс 46 для головки образует водонепроницаемое уплотнение с головкой 42 для предотвращения попадания воды в интерфейс и взаимодействия с электрическими выводами 48 для передачи энергии и данных.
[0057] В некоторых вариантах осуществления большая часть схемы и ценных компонентов может содержаться внутри рукоятки 40, противоположной головке 42, которая может быть выброшена после определенного количества использований. Это минимизирует стоимость запасных головок 42. Например, в некоторых вариантах осуществления батарейка, контроллер 13 могут содержаться в рукоятке 40, и любые воспринимающие элементы датчика и схема для соединения с воспринимающими элементами датчика могут содержаться в головке 42. В других вариантах осуществления головка 42 может не содержать схему или электрические компоненты и только обеспечивает функцию механической чистки с помощью щетки, поддерживая щетинки.
[0058] Например, как проиллюстрировано на фиг. 8A-8C, электронные устройства и батарейка могут содержаться внутри вставки 800, которая может легко вдвигаться в обычном устройстве 1 для гигиены полости рта. Например, устройство 1 для гигиены полости рта может содержать камеру и соединитель, который выполнен с возможностью соединения с основанием и вставкой 800, которая вдвигается в камеру, и основание образует водонепроницаемое уплотнение с соединителем. Вставка 800 может иметь любые формы (цилиндрическую, прямоугольную или другие), которые вдвигаются внутрь пространства зубной щетки. В некоторых примерах основание и соединитель содержат винтовой и резьбовой механизм для прикрепления зубной щетки. В некоторых примерах соединитель и основание находятся в конфигурации стыковки с тугой посадкой для легкого соединения и разъединения. Например, соединение может быть выполнено с помощью боковых стенок на соединителе и основания, как проиллюстрировано на фиг. 8A—8C.
[0059] В некоторых вариантах осуществления устройство 1 для гигиены полости рта может представлять собой только стандартную зубную щетку или другое стандартное устройство 1 для гигиены полости рта, которое является коммерчески доступным и может не иметь электронных устройств или может иметь только электронные устройства для перемещения головки с целью способствования чистке с помощью щетки. В некоторых вариантах осуществления устройство 1 для гигиены полости рта может только содержать рисунки 120 или дополнительное приспособление 130 с рисунком 120 и может не содержать воспринимающие движение электронные устройства или может не содержать вовсе электронные устройства. Соответственно в этих вариантах осуществления программное обеспечение для визуального отслеживания может быть применено для определения положения и ориентации устройства 1 для гигиены полости рта.
[0060] Устройство 1 для гигиены полости рта может также содержать динамик 50 и различные визуальные индикаторы 52 для обеспечения звукового и визуального сигнала обратной связи пользователю. Например, рукоятка 40 может содержать динамик 50 для проигрывания музыки, существующего сигнала обратной связи, мотивационных фраз, истечения оставшегося времени, рекомендаций по нажатию щеткой во время чистки с помощью щетки, информации о том, что не были должным образом очищены определенные четверти, объявления о завершении чистки с помощью щетки и т. д. Дополнительно устройство 1 для гигиены полости рта может содержать любое количество визуальных индикаторов 52 для предоставления существующего сигнала обратной связи о чистке с помощью щетки, включающего истекшее время, LED-индикатор о завершении чистки с помощью щетки, предупреждающие индикаторы о ненадлежащей чистке с помощью, включая индикаторы о направлении к каждой четверти. В других вариантах осуществления в устройстве 1 для гигиены полости рта может также применяться костная звукопроводимость для передачи звуковых сообщений пользователю.
[0061] Как проиллюстрировано на фиг. 6, устройство 1 для гигиены полости рта может содержать рукоятку 40 и головку 42, при этом любо одно, либо оба из них могут содержать рисунок 120 для визуального обнаружения перемещения и ориентации посредством связанной камеры 9. Например, в некоторых вариантах осуществления задняя часть головки 42 может содержать рисунок (а именно «AB» с кругом и линией, как проиллюстрировано). В других вариантах осуществления рисунок 120 может содержаться на дополнительном приспособлении 130, которое может быть выполнено с возможностью прикрепления к головке, или на шейке, окрашенной в щетинки, или в других положениях.
[0062] Рукоятка 40 может также содержать рисунок 120 или в некоторых вариантах осуществления может представлять собой единственный компонент, который содержит рисунок 120. Рисунок 120 на рукоятке 40 может быть нанесен непосредственно на рукоятку 40 или может находиться в дополнительном приспособлении 130, которое зажимается или соединяется с концом рукоятки 40. Рисунок 120 может быть расположен в удобном месте на дополнительном приспособлении 130 или на рукоятке 40 таким образом, чтобы он мог быть обнаружен под всеми углами обыкновенного действия чистки с помощью щетки. В некоторых вариантах осуществления рукоятка 40 может содержать несколько рисунков 120 на разных сторонах для обнаружения разных ориентаций. Например, в некоторых вариантах осуществления дополнительное приспособление 130 может быть квадратным или круглым и иметь разный рисунок 120 на каждой стороне для обнаружения системой ориентации устройства для гигиены полости рта относительно камеры.
[0063] Дополнительное приспособление 130 может быть утяжеленным таким образом, чтобы устройство 1 для гигиены полости рта само стояло при установке на плоской поверхности. Например, утяжелитель, который является достаточно тяжелым для 130, чтобы вертикально удерживать устройство 1 для гигиены полости рта, может быть приложен к нижней части дополнительного приспособления 130. В некоторых вариантах осуществления это может быть особенно полезным, если дополнительное приспособление 130 является сферическим на нижней части. Это обеспечит устройству для гигиены полости рта захватывающее качество, которое будет интриговать детей и даже взрослых.
[0064] Рисунок 120 может быть нанесен с использованием краски, других процессов маркирования, или в нем могут использоваться отражающие покрытия, зеркала или флуоресцентные покрытия. В некоторых вариантах осуществления рисунок 120 может быть окрашен или он может быть серым.
Устройство для гигиены полости рта без рисунка или электронных компонентов
[0065] Стандартное устройство 1 для гигиены полости рта или устройство для гигиены полости рта может применяться без каких-либо электронных устройств или рисунков. Как указано, в некоторых вариантах осуществления будет обнаружено положение и движение устройства 1 для гигиены полости рта.
Датчики
[0066] Устройство 1 для гигиены полости рта или отдельные электронные устройства (например, оптические датчики) могут содержать разные датчики, которые обнаруживают определенные признаки чистки с помощью щетки, которые могут быть проанализированы для обеспечения разных сигналов обратной связи и другой мотивационной информации пользователю. Например, один или более оптических датчиков 9 могут также применяться на отдельном электронном устройстве для обнаружения ориентации и перемещения устройства 1 для гигиены полости рта. Например, оптические датчики 9 могут применяться для захвата изображений устройства 1 для гигиены полости рта, и изображения могут быть отравлены на обработку для идентификации их границ, формы, продольной оси и ориентации (например, путем идентификации щетинок на них). В некоторых вариантах осуществления оптический датчик (оптические датчики) 9 может (могут) применяться для обнаружения рисунков на устройстве 1 для гигиены полости рта, а не самого устройства 1 для гигиены полости рта. Оптический датчик (оптические датчики) 9, применяемый (применяемые) для обнаружения рисунков, может (могут) ориентироваться в направлении для обеспечения визуальной линии прямой видимости для рисунка 120 на устройстве 1 для гигиены полости рта, который может находиться на головке 42, рукоятке 40 или на дополнительном приспособлении 130.
[0067] В качестве другого примера устройство 1 для гигиены полости рта может содержать разные датчики 11 движения для определения качества чистки с помощью щетки относительно определенных четвертей рта или даже отдельных зубов. Датчики 11 движения могут содержать гироскопы, акселерометры, магнитометры, гирометры и другие различные датчики, выполненные с возможностью обнаружения положений, перемещения и ускорения. Эти различные датчики 11 движения могут быть включены либо в рукоятку 40, либо в головку 42. Однако может быть преимущественным размещать датчик 11 движения в рукоятке 40, поскольку в некоторых вариантах осуществления, в которых датчик 11 движения находится в головке 42, датчик 11 движения может подвергаться большому количеству дополнительных движений (например, вследствие чистки с помощью щетки и зацепления с зубами), которые могут препятствовать обнаружению положения. В некоторых вариантах осуществления магнитометр определяет вектор (векторы) магнитного поля земли. В некоторых вариантах осуществления используется трехосевой магнитометр, а в других применяется двух- или одноосевой магнитометр.
[0068] Генератор 110 магнитного поля может также применяться для генерирования известного магнитного поля с известной полярностью, которая может быть определена магнитометром, включенным в устройство 1 для гигиены полости рта. Передатчик 110 магнитного поля может быть размещен внутри базовой станции 2, которая уже имеет катушку для перезарядки и/или схему 20 сопряжения, которая может применяться для создания обнаруживаемого магнитного поля. В других вариантах осуществления передатчик 110 магнитного поля может представлять собой отдельный электронный компонент в базовой станции 2 или в полностью отдельном физическом компоненте. В некоторых вариантах осуществления передатчик 110 магнитного поля находится в неподвижном блоке с известной ориентацией.
[0069] Устройство 1 для гигиены полости рта может также содержать различные датчики приближения, которые обнаруживают близость устройства 1 для гигиены полости рта ко рту пользователя. Они могут быть включены в головку 42 или в рукоятку 40. Датчики приближения могут применяться для получения дополнительной информации о положении, важной для определения качества чистки с помощью щетки пользователя.
[0070] Дополнительно устройство 1 для гигиены полости рта может содержать датчик 10 давления для определения, прикладывает ли пользователь надлежащее давление при чистке с помощью щетки своих зубов. Датчик 10 давления может быть включен в головку 42, которая может легче приспосабливаться или применять простые преобразователи давления или другие компоненты, выполненные с возможностью измерения давления.
[0071] В определенных примерах устройство для гигиены полости рта может содержать датчик 10 pH. Датчик 10 pH может применяться для определения pH слюны пользователя. Например, в некоторых примерах пользователю может быть дано указание разместить устройство 1 для гигиены полости рта во рту пользователя перед использованием зубной пасты или ополаскивателя для рта для исследования pH слюны. pH слюны может указывать на пародонтит или гингивит.
[0072] В других примерах устройство 1 для гигиены полости рта или система 100 могут также содержать датчик восприятия глубины. Например, в некоторых примерах датчик восприятия глубины проецирует решетку из лазерного света или другой лазерный рисунок с базовой станции 2, например, в месте камеры 9, и содержит детектор, который обнаруживает и анализирует искажения в рисунке для определения глубины. Датчик восприятия глубины может применяться для более точного определения очертаний отдельных объектов для идентификации и отслеживания движения. Например, система 100 может быть выполнена с возможностью более легкой идентификации головы пользователя и черт лица и нахождения отличий от устройства 1 для гигиены полости рта. Соответственно устройство восприятия глубины может применяться для определения перемещения в плоскости параллельно линии, соединяющей базовую станцию 2 с пользователем.
[0073] В некоторых примерах устройство 1 для гигиены полости рта может также содержать устройство восприятия глубины. Например, в некоторых примерах устройство 1 для гигиены полости рта может содержать проектор и датчик восприятия глубины, который проецируется на зубы пользователя. Он может применяться для образования карты зубов пользователя и для обнаружения отверстий или полостей во рту пользователя.
[0074] В некоторых вариантах осуществления различные головки 42 могут содержать камеру 56, которая обнаруживает различные аспекты качества зубов, которое может или не может относиться к качеству чистки с помощью щетки. Например, камера 56, представляющая собой камеру 56 ближней ИК-области спектра, может быть выполнена с возможностью применения на устройстве 1 для гигиены полости рта для сбора данных, указывающих на деминерализацию или кариес зубов или разрушение зубов. Например, в устройстве 1 для гигиены полости рта могут применяться определенные длины волн, которые особенно подходят для обнаружения этих отклонений, например в диапазоне 1300—1400 нм. В некоторых вариантах осуществления устройство 1 для гигиены полости рта может также содержать источник 58 света, который фокусируется на зубах во время чистки с помощью щетки и может применяться камерой для обнаружения определенных отклонений.
[0075] В некоторых примерах выходной сигнал камеры 56 может применяться системой 100 для образования карты зубного камня рта пользователя. Например, в некоторых примерах в системе 100 могут применяться изображения с камеры 56 для идентификации зубного камня на основе длин волны и построения схематического или другого представления зубного камня для рта пользователя. Например, в камере 56 могут применяться определенные длины волны и/или фильтры, которые отражают зубной камень более легко и идентифицируют, какие области рта имеют большее или меньшее количество зубного камня, или другие проблемы. Например, зубной камень может вызвать снижение отражения света и может также отражать разные длины волны. Эти разные рисунки могут быть отфильтрованы или обнаружены по алгоритмам машинного обучения системой, описанной более подробно ниже.
[0076] Определенные камеры 56 и потенциальные источники 58 света могут также быть реализованы для обнаружения уровней зубного налета на зубах и изменений в уровнях зубного налета во время чистки с помощью щетки. В определенных вариантах осуществления инфракрасные источники или источники 58 ближней ИК-области спектра и надлежащая камера 56, которая обнаруживает и записывает свет в этом диапазоне длин волны, могут потенциально обеспечивать возможность обнаружения зубного налета.
Программа для анализа чистки с помощью щетки и обратной связи
[0077] Различные датчики систем и оптические датчики могут собирать данные, относящиеся к качеству чистки с помощью щетки пользователем или общему состоянию зубов пользователя. Эти данные могут затем быть обработаны с использованием программ или приложений, установленных в различных частях системы 100 отслеживания устройства для гигиены полости рта. Соответственно, как описано выше, данные с датчиков и оптических датчиков могут быть обработаны программой, исполняемой системой 13 управления устройством 1 для гигиены полости рта или альтернативно процессором на мобильном устройстве 30, другом связанном вычислительном устройстве или сервере 4. Обработка и анализ системой 100 данных приводит к получению выходных данных, представляющих собой сигнал обратной связи, относящийся к качеству чистки с помощью щетки пользователя. Этот сигнал обратной связи можно передавать посредством звукового сигнала обратной связи через динамик 50 устройства 1 для гигиены полости рта, визуально по индикаторам 52 устройства 1 для гигиены полости рта или посредством обоих из них по связанному мобильному устройству 30 или, при наличии доступа, по веб-сайту, размещенному на сервере 4 или связанному с ним.
[0078] На фиг. 4 проиллюстрирован пример процесса, с помощью которого устройство 1 для гигиены полости рта оценивает качество чистки с помощью щетки конкретного пользователя. Каждый из этапов может не требоваться в конкретном варианте осуществления, но различные комбинации этих этапов могут быть реализованы в системе 100 отслеживания устройства для гигиены полости рта. Во-первых, пользователь может вводить пользовательские параметры 70 в систему 100 отслеживания устройства для гигиены полости рта для обеспечения пользователю возможности калибровки устройства 72 для гигиены полости рта. В некоторых вариантах осуществления устройство 1 для гигиены полости рта может быть откалибровано на заводе, пользователем или обоими этими путями. После калибровки пользователь может взять устройство 1 для гигиены полости рта и начать чистку с помощью щетки своих зубов. Устройство для гигиены полости рта или связанные устройства отслеживания (например, камера) затем определяют, что инициирована чистка с помощью щетки 74, и начинают запись данных 76 датчика во время чистки с помощью щетки. Затем система 100 отслеживания устройства для гигиены полости рта может анализировать данные 78 датчика для вывода пользователю сигнала 80 обратной связи о качестве чистки с помощью щетки.
Пользовательские параметры
[0079] Соответственно пользовательские параметры 60 могут быть введены 70 для каждого конкретного пользователя определенного устройства 1 для гигиены полости рта или связаны с конкретной учетной записью, сохраненной на сервере 4 внутри устройства для гигиены полости рта, базовой станции или других вычислительных устройств. После инициализации нового устройства для гигиены полости рта или новой учетной записи на сервере 4 пользователь может вводить свою информацию, которая может применяться для определения оптимальных количеств и характеристик чистки с помощью щетки. Например, программа 15 может сначала запрашивать имя пользователя, пол, рост, вес, возраст и определенные вопросы в отношении его стоматологического анамнеза. Пользовательские параметры 60 могут затем быть связаны с определенными данными, записанными во время использования устройства для гигиены полости рта пользователем, включая данные калибровки, которые являются характерными для определенных устройств 1 для гигиены полости рта, связанных оптических датчиков 9 или являются универсальными и могут применяться в отношении любого устройства 1 для гигиены полости рта или оптических датчиков 9, соединенных с системой 100. В некоторых вариантах осуществления пользователь может загрузить свой снимок, или может быть инициирована программа, которая использует оптический датчик (оптические датчики) 9 для захвата изображения пользователя на расстоянии, с которого пользователь обычно чистит с помощью щетки свои зубы.
Обнаружение использования
[0080] Система 100 отслеживания чистки зубов с помощью щетки может также определять, произошло ли использование, и количество использований в день. В некоторых вариантах осуществления устройство 1 для гигиены полости рта и/или система обнаружения оптического датчика обнаруживает данные о движении посредством датчиков 11 движения и/или оптических датчиков 9 и анализирует данные для определения, произошло ли использование, или перемещалась ли щетка, или использование было инсценировано.
[0081] Когда движение, указывающее на использование, обнаружено, устройство 1 для гигиены полости рта или устройство 9 в виде оптического датчика может сохранять данные о положении и движении в своей памяти 14 для дальнейшего анализа. Например, это предотвратит запись ложных срабатываний, например, когда пользователь перемещает щетку в аптечный шкафчик, или от детей, окружающих систему, кратковременно встряхивающих зубную щетку.
[0082] Например, перемещение, указывающее на использование, может быть связано с определенным уровнем ускорения и/или частотой, которая свойственна определенному пользователю. В других вариантах осуществления пользователь может нажимать на кнопку или включать устройство 1 для гигиены полости рта, базовую станцию 2 или устройство с оптическим датчиком/камерой 9 для запуска датчиков на устройстве, которые затем начнут записывать данные. Соответственно система определяет инициирование чистки с помощью щетки 74. В некоторых вариантах осуществления это выполняется автоматически, например, после обнаружения определенных ускорений и частот. Соответственно после того, как пользователь берет зубную щетку, датчики 11 движения могут начинать запись данных 76 и отправлять их на какую-либо из различных систем 13 управления в системе 100 с целью их анализа 78 для характеристик, связанных с чисткой с помощью щетки.
[0083] Например, устройство 1 для гигиены полости рта обычно находится на своей базовой станции 2 в вертикальном положении перед использованием, в ориентации, которая не подходит для чистки с помощью щетки пользователем, удерживающим устройство 1 для гигиены полости рта. Соответственно после того, как пользователь берет устройство 1 для гигиены полости рта, устройство 1 для гигиены полости рта обычно поворачивается примерно на 45 градусов для удерживания в основном в горизонтальном положении во время чистки с помощью щетки. Соответственно одним пороговым критерием определения инициирования чистки с помощью щетки 74 является условие наклонения устройства 1 для гигиены полости рта в пределах определенного диапазона углов, указывающего на то, что устройство 1 для гигиены полости рта находится в горизонтальном или близком к горизонтальному положении. Он может представлять собой диапазон углов в 20 градусов, 5 градусов, 10 градусов или другие подходящие диапазоны. Дополнительно на подходящий диапазон может указывать ряд сеансов калибровки. Разумеется, он может быть обнаружен с помощью оптических датчиков 9 и/или датчиков 11 движения.
[0084] В некоторых вариантах осуществления пользователь может включить устройство, и оптический датчик/камера 9 (и/или датчик глубины) могут начать запись. Затем система может осуществлять поиск для определения нахождения рисунка 120 на определенной высоте, указывающей, что он находится возле рта пользователя. Это может быть объединено с информацией об ускорении, обнаруживаемой оптическим датчиком (оптическими датчиками) 9 и анализируемой так, как указано выше в случае датчиков 11 движения.
[0085] В других вариантах осуществления определение инициирования чистки с помощью щетки 74 и того, произошла она или нет, может быть выполнено системой 100 с использованием статистического анализа данных о движении с датчиков 11 движения и/или оптических датчиков 9. Этот статистический анализ может быть выполнен путем корреляции данных с датчиков 11 движения и/или оптических датчиков 9 с предыдущими данными калибровки или чистки зубов с помощью щетки или данными, сохраненными от других пользователей. Например, после выполнения анализа может быть определено определенное пороговое значение корреляции данных о движении с ранее записанными данными калибровки, которые связаны с использованием, которое указывает на инициирование чистки с помощью щетки 74 или ее выполнение. Соответственно после того, как пользователь начал чистку с помощью щетки, система 100 может записывать, что использование было инициировано 74, и записывать данные 76 в память 14 до тех пор, пока не завершится использование, в качестве данных чистки с помощью щетки, например после того, как коэффициент корреляции падает ниже определенного порогового значения.
[0086] Например, благодаря применению установки системы оптического датчика/камеры 9, оптический датчик/камера 9 могут выводить данные, которые содержат изображения устройства для гигиены полости рта (например, зубной щетки или ирригатора) и пользователя. Данные могут быть отправлены на различные системы управления для обработки и анализа движения. Например, алгоритмы обработки изображения могут сначала определять граничное условие для идентификации границ губ/рта пользователя, зубов, головы, устройства для гигиены полости рта, рукоятки, головки, щетинок, ирригатора и т. д.
[0087] Идентификация границ характеристик человека может применяться с использованием стандартных алгоритмов идентификации границ, в которых обычно могут применяться изменения пороговых значений в определенных цветах (оптических частотах). После идентификации границ устройства 1 для гигиены полости рта может быть идентифицирована продольная ось и потенциально ориентация щетинок (если это зубная щетка) для определения угловой ориентации относительно продольной оси. Это обеспечит возможность системе определять общую ориентацию и движение зубной щетки с отметками времени от устройства отображения.
[0088] Затем зубная щетка может быть идентифицирована на определенной стороне рта с помощью анализа относительных положений зубной щетки и признаков рта. Кроме того, ориентация зубной щетки относительно стороны рта, на которой она находится, может применяться для определения того, какую секцию или часть зубов пользователя чистят с помощью щетки или подвергают струе воды. Например, когда на правой стороне чистят с помощью щетки нижнюю часть верхнего большого коренного зуба, то система визуализации определяет нахождение зубной щетки на правой стороне рта с помощью щетинок, обращенных вверх.
[0089] Кроме того, после определения общего представления и ориентации устройства 1 для гигиены полости рта в каждом кадре отметки времени каждого кадра могут применяться для определения движения зубной щетки. Например, на основе изменения положений (время и расстояние) можно вычислить скорость и ускорение изменений. Соответственно, как и в случае с датчиками 11 движения, данные изображения могут применяться для определения движения устройства для гигиены полости рта. Соответственно это движение может применяться для определения соблюдения чистки с помощью щетки или других стандартов гигиены полости рта, как раскрыто далее в настоящем документе.
[0090] В анализе данных о движении (обработанных с датчиков 11 движения или данных изображения с оптических датчиков 9) может применяться анализ по типу характерных признаков и характера кривой, в ходе которого сравниваются только относительные перемещения. Характер кривой может определяться на основе ускорения в определенных осях (как обнаружено датчиками 11 движения, на основе данных изображения по отметкам времени или другими способами), поскольку движение чистки с помощью щетки зубы обычно выполняется как относительно быстрое движение, которое не является характерным для какого-либо другого случайного перемещения устройства 1 для гигиены полости рта, например, чтобы поставить ее обратно в шкафчик. Дополнительно может отслеживаться частота чистки с помощью щетки, поскольку чистка с помощью щетки представляет собой обычно быстрое периодическое движение, и, следовательно, могут быть использованы различные полосовые фильтры диапазонов частот, низкочастотные фильтры и фильтры Калмана или другие технологии для идентификации определенных рассматриваемых частот и амплитуд в тех частотах, которые указывают на чистку с помощью щетки.
[0091] Эти амплитуды в частотах могут представлять собой определенные частоты, которые достигают пороговой амплитуды и связаны или определены для указания того, что пользователь осуществляет чистку с помощью щетки. Например, определенные частоты в горизонтальной или вертикальной оси могут требоваться для системы 100 с целью определения инициирования чистки с помощью щетки 74, или определенные периодические ускорения, которые достигают определенных пороговых значений, могут требоваться для системы с целью определения инициирования чистки с помощью щетки 74. В некоторых вариантах осуществления это может быть частота 1—5 Гц. После того, как данные, проанализированные контроллером 13, упали ниже определенного порогового значения, который указывает на использование, система 100 может остановить запись данных или определить, что чистка с помощью щетки прекратилась.
[0092] В дополнение к статистическому анализу система может обнаруживать перемещение, указывающее на использование или фактическую чистку с помощью щетки с использованием фильтрации и анализа пороговых значений. Например, система 100 может сначала фильтровать данные с датчиков 11 движения для пропускания частот только в определенной полосе (поскольку чистка с помощью щетки является периодической) и отслеживать те частоты для обнаружения, когда, к примеру, находящийся в них сигнал достигает порогового значения для по меньшей мере определенного количества циклов или продолжительности с целью определения, что пользователь осуществляет чистку с помощью щетки. Например, если пользователь чистит с помощью свои зубы в среднем при 1—5 Гц (или потенциально меньше в случае зубной щетки, оснащенной двигателем), может быть реализован полосовой фильтр диапазонов 1—5 Гц.
[0093] Таким образом, когда система 100 обнаруживает, что амплитуда полосы частот в диапазоне 1—5 Гц достигает порогового значения, указывающего на использование, контроллер 13 может начать записывать данные с датчиков в память 14 в течение времени, когда данные о движении указывают на использование устройства 1 для гигиены полости рта. Дополнительно периодические ускорения в определенных осях или угловое ускорение (для круговой чистки с помощью щетки), которое достигает определенных пороговых амплитуд, может также использоваться для указания на инициирование чистки с помощью щетки. Анализ данных может также зависеть от того, содержит ли устройство 1 для гигиены полости рта электронный двигатель для обеспечения вибрации головки для помощи в чистке с помощью щетки. В тех вариантах осуществления данные могут быть отфильтрованы для исключения высокочастотного ускорения и другого шума, создаваемого электронным двигателем.
Качество чистки с помощью щетки - типы перемещения
[0094] В некоторых вариантах осуществления может быть определено качество чистки с помощью щетки на основе типа перемещения, которое выполняет пользователь с использованием устройства 1 для гигиены полости рта. Стоматологи обозначили, что определенные перемещения являются более или менее полезными для чистки с помощью щетки. Разные типы перемещений включают перемещения по кругу, движения как по часовой стрелке, так и против нее, движения от кончика до корня и движения слева направо.
[0095] В некоторых примерах система 100 может определять длину прохода во время чистки с помощью щетки. Это может осуществляться посредством любой комбинации раскрытых способов, включая определение величины ускорения и времени ускорения в каждом направлении для проходов. Например, проходы могут быть отфильтрованы путем идентификации надлежащего рисунка или фильтрации на определенных частотах и величинах. Например, ускорение с определенным значением в определенных направлениях относительно зубной щетки может указывать на проходы во время чистки с помощью щетки.
[0096] Большая часть чистки с помощью щетки происходит в плоскости щетинок, поскольку проходы оптимизируют для контакта кончиков щетинок с зубами с использованием движения чистки с помощью щетки. Соответственно система может отфильтровывать ускорение в плоскости щетинок или в подходящем допустимом пределе для дополнительной идентификации ускорения или перемещения, которое относится к проходам во время чистки с помощью щетки.
[0097] Система 100 может определять, выполняют ли эти движения, относительное количество этих движений путем фильтрации данных с датчиков 11 движения или оптических датчиков 9 в определенной оси, которая указывает на каждое движение. Например, данные с датчиков 11 движения или оптических датчиков 9 могут быть отфильтрованы в оси, горизонтальной относительно плоскости притяжения, и система 13 управления или другие процессоры системы 100 могут обрабатывать данные для определения того, достигли ли значения ускорения, частоты или другие данные о движении достаточно большой амплитуды в определенном направлении для указания на выполнение конкретного движения.
[0098] В случае данных изображения, в дополнение к обнаружению пороговых значений ускорения или скорости, которые указывают на чистку с помощью щетки, оптическая система может обнаруживать, когда устройство 1 для гигиены полости рта находится в определенной близости ко рту пользователя или во рту пользователя, для определения инициирования чистки с помощью щетки. Например, если головка может быть идентифицирована, в случаях когда головка находится внутри области, определенной как находящаяся во рту пользователя, система может определять, что пользователь чистит с помощью щетки свои зубы достаточно эффективно.
[0099] В других примерах само ускорение может применяться для определения использования движений вперед и назад или круговых движений. В других вариантах осуществления данные об ускорении с датчиков 11 движения могут быть интегрированы для определения фактического перемещения устройства 1 для гигиены полости рта для оценивания типа применяемых проходов во время чистки с помощью щетки. Анализ данных может также зависеть от того, содержит ли устройство 1 для гигиены полости рта электронный двигатель для обеспечения вибрации головки для помощи в чистке с помощью щетки. В тех вариантах осуществления данные могут быть отфильтрованы для исключения высокочастотного ускорения и другого шума, создаваемого электронным двигателем.
[00100] В некоторых вариантах осуществления электронный двигатель для обеспечения вибрации головки 42 может быть включен в устройство 1 для гигиены полости рта. В тех вариантах осуществления данные о движении, записанные датчиками, относящиеся к перемещениям во время чистки с помощью щетки, характеризуются меньшей амплитудой, чем в случае ручной чистки с помощью щетки. Это объясняется тем, что пользователи ручных зубных щеток без помощи электронного двигателя и подвижной головки 42 будут чистить с помощью щетки свои зубы более интенсивными движениями. Соответственно алгоритмы, применяемые для анализа данных о движении для обнаружения, использования, движения и местоположения устройства для гигиены полости рта, изменены для учета меньших амплитуд и/или разных движений и включают фильтрацию высокочастотного шума от двигателя. Соответственно в некоторых вариантах осуществления пороговые значения, установленные для амплитуды, требуемой для обнаружения или указания прохода во время чистки с помощью щетки, являются меньшими, поскольку пользователь с использованием электронного устройства для гигиены полости рта обычно перемещает щетку более медленными темпами и осуществляет более прямые перемещения.
[00101] Кроме того, датчик 10 давления может также применяться для определения того, действительно ли выполняется чистка с помощью щетки, или сочетаться с данными о движении, указанными выше. Например, пользователь может перемещать устройство 1 для гигиены полости рта по окружности, но не нажимать на зубы. Поэтому, соответственно, требование как движения определенной частоты, амплитуды или признаков, так и определенного давления устранит много ложных срабатываний от случайного перемещения или давления щетки, которое не происходит во время чистки с помощью щетки. Соответственно датчик 10 давления может выводить сигнал, который проанализирован 78 контроллером 28, для определения давления, приложенного на зубы. Если давление превышает определенное пороговое значение, система 100 может указывать на или определять вероятность того, что пользователь осуществляет чистку с помощью щетки. Этот анализ может быть выполнен с помощью статистического анализа, анализа пороговых значений или других подходящих способов расчета для определения вероятности чистки с помощью щетки на основе величины и/или продолжительного характера давления, записанного датчиком 10 давления.
[00102] В некоторых примерах система 100 и устройство 1 для гигиены полости рта могут создавать базу конкретных типов проходов или движений во время чистки с помощью щетки и предоставлять пользователю сигнал обратной связи в отношении проходов или движения во время чистки с помощью щетки, которые выполняет пользователь для осуществления им чистки с помощью щетки. Например, система может хранить словарь типов движения для чистки зубов с помощью щетки, и порядок типов движения, а также качество каждого типа движения.
[00103] Примеры типов движения могут быть следующими:
Идентификация конкретных пользователей
[00104] Система 100 может содержать сохраненные пользовательские параметры, связанные с сохраненными пользовательскими данными чистки зубов с помощью щетки (или другой гигиены полости рта) и демографическими данными пользователя, которые включают возраст, рост и пол пользователя. Во время или после этапа отслеживания действий гигиены полости рта (например, чистки зубов с помощью щетки) устройство 1 для гигиены полости рта, мобильное устройство 30 или сервер могут автоматически стремиться сравнить пользователя с по меньшей мере одним пользовательским параметром с использованием по меньшей мере одного предопределенного правила или алгоритма в зависимости от пользовательских параметров и данных за прошедший период. Если пользователь не является постоянным пользователем устройства для гигиены полости рта, указанный пользователь идентифицирует себя как гостя на мобильном устройстве.
[00105] На этапе идентификации пользователя конкретный пользователь может быть связан с устройством для гигиены полости рта и предположительно являться пользователем. При использовании нескольких пользователей для данного устройства для гигиены полости рта для связывания пользователя с действием чистки с помощью щетки по меньшей мере в устройстве для гигиены полости рта и возможно в мобильном устройстве и/или сервере по меньшей мере для справочных целей используются последние два пользователя.
[00106] В вариантах осуществления, в которых применяется камера, пользовательские параметры могут иметь снимок пользователя, загруженный или связанный с параметрами. Это позволит системе распознавания на основе графического материала автоматически определять конкретного пользователя, связанного с параметрами. В некоторых примерах система 100 может захватывать снимок посредством камеры и идентифицировать конкретного пользователя путем сравнения снимка, взятого изначально у каждого пользователя, который инициирует чистку с помощью щетки. В некоторых примерах в системе может применяться положение пользователя в кадре камеры для определения пользователя (например, путем оценивания высоты пользователя или относительной высоты). В других примерах в системе 100 может применяться машинное обучение и компьютерные принципы зрительного восприятия для сравнения признаков пользователя и определения, какой сохраненный пользователь (и связанные пользовательские параметры) на данный момент осуществляет чистку с помощью щетки. Например, цвет глаз или другие технологии распознавания лица могут применяться для сравнения пользователей на надежной основе, особенно если каждый блок содержит в целом только 2, 3 или 4 пользователя для проведения различия.
[00107] В других примерах данные об использовании, связанные с конкретным пользователем, могут применяться для идентификации данного пользователя. Например, данные об использовании для конкретного пользователя могут быть связаны с определенным уровнем ускорения и/или частотой, которая свойственна данному пользователю. Например, конкретный пользователь может обладать определенным диапазоном частот чистки зубов с помощью щетки или может начинать с конкретной стороны рта. В некоторых примерах комбинации физических признаков, данных движения или других индикаторов могут применяться для идентификации пользователей и связывания пользователя с его данными параметров.
Продолжительность чистки и положение во время чистки с помощью щетки
[00108] Далее данные чистки с помощью щетки, записанные выше, могут быть проанализированы 78 для предоставления сигнала обратной связи в отношении качества чистки с помощью щетки на основе положения и времени 80. Он может быть представлен после завершения чистки с помощью щетки или в режиме реального времени для предоставления текущего сигнала обратной связи пользователю. Например, датчики 11 движения и/или оптические датчики 9 могут обнаруживать информацию о положении устройства 1 для гигиены полости рта. С использованием данных акселерометра и гирометра, визуально обнаруженных данных с оптических датчиков 9 и рисунков 120 или других датчиков 11 движения, положение, ориентация и перемещение устройства 1 для гигиены полости рта могут быть определены и рассчитаны для вычисления относительного перемещения положения головки 42. Например, если расстояние, ориентация и направление датчиков 11 движения к части в виде щетинок головки 42 известны, система 11 сможет определить положение головки 42, а также ее относительное движение, ориентацию и область покрытия на основе относительного движения датчиков 11 движения.
[00109] Это может быть вычислено путем первоначального вычисления эталонной координаты после обнаружения устройством 1 для гигиены полости рта движения и записывания относительного перемещения относительно первоначальной координаты (первоначальных координат) для определения характера кривой чистки с помощью щетки. Это может быть выполнено путем вычисления перемещения головки 42, путем вычисления изменений в ориентации щетки и перемещения из-за ускорения, записанного гирометром или акселерометром или визуально обнаруженного оптическими датчиками 9. Эти вычисления могут быть выполнены системой 13 управления или другими процессорами, которые применяются в системе 100, включая процессор мобильного телефона, исполняющий приложение на мобильном телефоне, или процессор (процессоры) на сервере, запускающем программное обеспечение для анализа данных.
Продолжительность чистки и положение во время чистки с помощью щетки — магнитометр
[00110] В некоторых вариантах осуществления датчик 11 магнитометра может предоставлять дополнительную информацию о положении путем определения полярности, направленного вектора напряженности магнитного поля земли и/или магнитного поля, генерируемого передатчиком 110 магнитного поля. В некоторых вариантах осуществления это может быть передатчик 110 магнитного поля, размещенный в базовой станции 2, поскольку базовая станция 2 является неподвижной, и передатчик 110 магнитного поля имеет известную полярность и направление (например, горизонтальное или вертикальное и в определенном направлении). Это может быть обнаружено магнитометром 11, размещенным в устройстве 1 для гигиены полости рта. Соответственно напряженность магнитного поля, обнаруженная датчиком 11 магнитометра, даст оценку расстояния, на котором устройство 1 для гигиены полости рта находится от базовой станции 2 вдоль сферической кривой, или овальной кривой, или яйцевидной кривой, представляющей линии магнитного поля, окружающие базовую станцию 2 или другое связанное устройство.
[00111] Дополнительно магнитометр выполнен с возможностью определения направления вектора магнитного поля вдоль линий магнитного поля. В других вариантах осуществления расстояние устройства 1 для гигиены полости рта от базовой станции 2 может быть вычислено с использованием: ориентации магнитного поля, обнаруженной датчиком 11 магнитометра, которое излучается передатчиком 110 магнитного поля, вместе с информацией о позиции акселерометра и гирометра. Это возможно благодаря знанию формы магнитного поля и его векторов при определенных расстояниях от передатчика, а также его полярности. Например, наклон магнитного поля относительно плоскости притяжения изменяется, как и следовало ожидать, при различных расстояниях от передатчика магнитного поля, например. Дополнительно, путем сравнения вектора притяжения с вектором магнитного поля, угол может применяться для вычисления высоты вдоль линий оболочки или магнитного поля. Это связано с тем, что угол поля относительно плоскости притяжения отличается на каждой высоте, потому что яйцевидная оболочка направлена под другим углом относительно плоскости притяжения на каждой высоте. Это является особенно верным, когда северный и южный полюсы ориентированы в вертикальном направлении, так что линии магнитного поля имеют компоненты, которые изменяются от горизонтальных вблизи нижней части и верхней части яйцевидной оболочки до вертикальных примерно на высоте передатчика.
[00112] Соответственно данные магнитометра, объединенные с данными акселерометра и/или оптическими данными, могут применяться для определения положения устройства 1 для гигиены полости рта в кольце, которое размещено в горизонтальной плоскости, которая имеет равную напряженность магнитного поля вокруг передатчика 110. Например, на фиг. 5 проиллюстрирован вариант осуществления базовой станции 2 с передатчиком 110 магнитного поля с одной катушкой, который генерирует оболочки, имеющие части с векторами B (магнитного) поля, которые изменяют направление в вертикальной плоскости. Датчики 11 на устройстве 1 для гигиены полости рта могут включать датчик 11 магнитного поля для обнаружения магнитного поля, генерируемого передатчиками 110 магнитного поля, и акселерометр 11 для обнаружения, среди прочих ускорений, ускорения плоскости притяжения ag. Соответственно магнитометр 11 на устройстве 1 для гигиены полости рта может быть расположен с полем B, генерируемым передатчиком 110. Соответственно напряженность магнитного поля и направление (Bt) могут быть определены магнитометром 11. Одновременно с этим акселерометр 11 может обнаруживать ускорение от плоскости притяжения в качестве вектора ag. Система 100 может анализировать те данные и определять Qo между вектором притяжения ag и вектором магнитного поля Bt.
[00113] Затем может быть использован угол Qo для определения кольца R, в котором положение устройства 1 для гигиены полости рта, как известно, находится в некоторой точке вдоль кольца R. Например, сначала может применяться напряженность магнитного поля B, обнаруженного магнитометром 11, для определения того, на каком магнитном поле находится яйцевидная или кольцевидная оболочка устройства для гигиены полости рта (например, B1, B2 или B3). Это ограничивает положение устройства 1 для гигиены полости рта полой оболочкой или кольцом с отверстием вокруг передатчика 110. Далее может применяться Qo для вычисления вертикального положения на оболочке или кольце с отверстием и, следовательно, ограничения положения кольцом R, окружающим передатчик 110. Соответственно, если система 100 обнаруживает перемещение в новое кольцо R, система будет иметь информацию о возможном направлении и пройденных расстояниях. Эта информация будет улучшена данными акселерометра, которые предоставят дополнительную информацию о направлении прохождения. Она, например, может обеспечивать определенные верхние или нижние границы направления и/или расстояния, пройденного устройством 1 для гигиены полости рта. Таким образом, данная система 100 и технология обработки данных могут применяться для предоставления информации об относительном положении и перемещении устройства 1 для гигиены полости рта и использоваться для определения положения во время чистки зубов с помощью щетки во рту, как описано в настоящем документе.
[00114] В некоторых вариантах осуществления датчик 11 магнитометра может определять магнитное поле, передаваемое передатчиком 110 магнитного поля. Для этого эти данные магнитного поля должны быть отфильтрованы от постороннего шума и, в частности, от магнитного поля земли. Магнитное поле земли имеет относительно постоянную напряженность и направление в данном месте на шкале перемещения зубной щетки. Кроме того, магнитное поле земли довольно велико, и большинство магнитометров откалиброваны по шкале магнитного поля земли. Соответственно, чтобы использовать магнитометр, откалиброванный для магнитного поля земли, например, в вариантах осуществления, в которых обнаруживается магнитное поле как земли, так и передатчиков 110 для вычисления изменений ориентации и положения, для их различения должны использоваться определенные алгоритмы фильтрации. В некоторых вариантах осуществления важные данные, которые могут применяться для их фильтрации, состоят в том, что напряженность магнитного поля земли остается относительно постоянной по шкале перемещения устройства для гигиены полости рта по сравнению с обнаруженным изменением магнитного поля, которое передается передатчиком 110 магнитного поля. Следовательно, временные фильтры могут быть применены для распознавания двух магнитных полей. В некоторых вариантах осуществления магнитное поле, передаваемое передатчиком 110, может быть импульсным с определенной частотой или амплитудой, чтобы его можно было легко отфильтровать с использованием обработки сигналов и анализа данных.
[00115] В некоторых вариантах осуществления компонент направления магнитного поля векторных данных, выводимых из магнитометра 11, также может применяться для вычисления относительного изменения положения и/или ориентации. Например, в некоторых вариантах осуществления передатчик 110 может передавать магнитное поле с векторной ориентацией, проиллюстрированной на фиг. 5. Информация о направлении или векторах, обнаруженная магнитометром из магнитного поля B, созданного передатчиком 110, может быть полезна для обеспечения информации об ориентации и/или относительном положении. Эти данные затем могут быть объединены с данными из информации о направляющих векторах, обнаруженной в магнитном поле земли, которые, вероятно, характеризуются ориентацией, которая отличается от ориентации магнитного поля земли. Соответственно магнитометр 11 может обнаруживать векторы, указывающие направление магнитного поля земли, и векторы магнитного поля передатчика 110, чтобы обеспечить исходную точку для ориентации в пространстве и для изменений положения.
[00116] В одном примере магнитометр, определяющий магнитное поле земли, может определять ориентацию устройства 1 для гигиены полости рта в горизонтальной плоскости, как компас, или вокруг оси Z, проиллюстрированной на фиг. 5. В некоторых вариантах осуществления она может включать вектор, не только в горизонтальном направлении, но и в вертикальном направлении, который является постоянным и основан на наклоне магнитного поля в конкретном географическом местоположении. В других вариантах осуществления передатчик 110 может быть размещен в диагональной, горизонтальной, вертикальной или другой известной ориентации, которая используется в качестве эталонной точки для вычисления ориентации магнитометра 11 и изменений положений магнитометра 11 и устройства 1 для гигиены полости рта.
[00117] Кроме того, калибровка может быть необходимой на основе относительной ориентации устройства 1 для гигиены полости рта, когда оно используется пользователем и передатчиком 110 магнитного поля базовой станции. Поскольку форма и ориентация линий магнитного поля изменяются на основе положения относительно генератора магнитного поля, может потребоваться выполнение разных формул, калибровок или корректировок. Например, возле боковой части генератора магнитного поля линии потока могут быть ориентированы в первом направлении; однако вблизи любого полярного конца передатчика 110 (например, выше или ниже, или справа или слева) линии потока могут быть ориентированы перпендикулярно первому направлению возле боковой части или средней части передатчика 110. Дополнительно от пользователя может потребоваться чистить зубы с помощью щетки на определенном расстоянии от передатчика 110, чтобы гарантировать, что в этом положении генерируется надлежащее магнитное поле для измерения. Преимущественный аспект катушек, которые физически ориентированы в вертикальном направлении, состоит в том, что генерируемое магнитное поле относительно одинаково на всех сторонах передатчика 110 (и опосредованно базовой станции 2), предполагая относительно одинаковую высоту, и поэтому калибровка может требовать более простых алгоритмов и/или процессов. Однако, если катушки лежат в горизонтальной плоскости, в зависимости от ориентации базовой станции 2, линии магнитного потока могут проходить в разных направлениях. В этом варианте осуществления пользователю может быть дано указание повернуть базовую станцию 2, чтобы разместить ее в определенном направлении относительно пользователя, где пользователь обычно чистит с помощью щетки свои зубы. В других вариантах осуществления при калибровке могут использоваться или учитываться изменения направления вектора магнитного поля, передаваемого передатчиком 110.
[00118] Данные с магнитометра 11 могут быть объединены с данными, выводимыми из акселерометра 11, или данными с гирометра 11 и акселерометра 11 или оптического датчика/камеры 9 для определения ориентации и/или положения. Например, данные акселерометра 11 и/или оптического датчика/камеры 9 могут сначала применяться для определения ориентации устройства 1 для гигиены полости рта относительно плоскости притяжения во время периодов относительно малого ускорения, так что ускорение плоскости притяжения обнаруживается посредством трехосевого акселерометра или анализа изображения, поэтому может быть определено, отклонено ли устройство 1 для гигиены полости рта относительно боковой оси, которая находится в горизонтальной плоскости, или как оно повернуто относительно своей продольной оси (продольной оси, проходящей по зубной щетке в продольном направлении) по отношению к плоскости притяжения, направленной вниз к земле.
[00119] Если данные акселерометра указывают на то, что устройство 1 для гигиены полости рта испытывает относительно небольшое количество ускорений по сравнению с обычными перемещениями при чистке зубов с помощью щетки, система управления может определить, что устройство 1 для гигиены полости рта относительно неподвижно, и данные акселерометра могут применяться для определения вектора, ориентированного в направлении плоскости притяжения.
[00120] Если данные акселерометра объединены с данными гирометра, можно определить отклонения позиции зубной щетки относительно плоскости притяжения для вычисления положения зубной щетки. Например, первоначальная запись вектора притяжения может затем быть использована в качестве опорного вектора для определения позиции. Затем отклонения от этого начального положения или позиции, определяемых акселерометром и гирометром, могут быть определены путем вычисления изменений ориентации от исходного опорного вектора на основе данных гирометра. Соответственно данные акселерометра или акселерометра и гирометра могут применяться для определения того, в какую сторону обращены щетинки. Например, в некоторых вариантах осуществления данные акселерометра и гирометра могут быть проанализированы для определения, обращены ли щетинки вверх, вперед или вниз, в переднюю, левую и правую стороны, что потенциально ограничивает до определенной четверти или другого отделения рта. Например, когда щетинки устройства 1 для гигиены полости рта обращены вниз, они могут чистить только верхние части нижних зубов. Если щетинки устройства 1 для гигиены полости рта обращены вверх, это может быть только чистка с помощью щеток зубных коронок или кончиков верхних зубов. В качестве дополнительного примера, когда устройство 1 для гигиены полости рта обращено вправо, может происходить чистка только левых сторон больших коренных зубов и т. д. Дополнительно в некоторых вариантах осуществления ориентации относительно плоскости притяжения являются определенными, поскольку вектор, представляющий плоскость притяжения, всегда указывает в направлении к полу или земле, и чистка с помощью щетки, скорее всего, выполняется стоя прямо.
[00121] Следовательно, можно определить ориентацию щетинок относительно зубов в некоторых аспектах или плоскостях ориентации. В некоторых вариантах осуществления эти вычисления могут быть сделаны детерминированно или оценены с использованием статистики и/или модернизированной модели рта. Например, если акселерометр определяет, что щетинки зубной щетки обращены вниз с определенным пределом погрешности или статистически значимым пределом, то система может определить, что очищаемые поверхности, вероятно, являются верхними частями нижних зубов (или языка, например). В других вариантах осуществления, как раскрыто в настоящем документе, ориентации чистки с помощью щетки могут быть вычислены относительно друг друга, так что модель рта может быть установлена каждый раз, когда пользователь чистит с помощью щетки свои зубы.
[00122] Для определения ориентации в горизонтальной плоскости, перпендикулярной плоскости притяжения, может применяться магнитное поле земли или магнитное поле, генерируемое, например, передатчиком 110 базовой станции 2. В некоторых вариантах осуществления передатчик 110 магнитного поля генерирует магнитное поле с направленными векторами, которые изменяют направление в горизонтальной плоскости, которая перпендикулярна плоскости притяжения. Соответственно, даже если абсолютное направление не известно, относительная ориентация устройства 1 для гигиены полости рта по отношению к магнитному полю, обнаруживаемому магнитометром 11 и излучаемому передатчиком 110, может быть определена в горизонтальной плоскости. Соответственно могут быть определены относительные изменения этой ориентации в горизонтальной плоскости, и могут быть определены пути перемещения вдоль эталонной системы координат. В некоторых вариантах осуществления эталонная система координат может основываться на одной из начальных или любых других точек данных, записанных во время сеанса чистки зубов с помощью щетки. Как раскрыто в настоящем документе, эти относительные изменения могут применяться для вычисления положений или восстановления формы с использованием относительных положений после того, как пользователь заканчивает чистку с помощью щетки.
[00123] В некоторых вариантах осуществления данные с гирометра, магнитометра, оптического датчика и акселерометра могут применяться для определения ориентации относительно плоскости притяжения и одного или обоих из магнитного поля земли и передатчиков 110. В некоторых вариантах осуществления ориентация может быть определена и подтверждена или одобрена разными датчиками 11 или оптическими датчиками 9. Например, угловая скорость с гирометра может быть интегрирована для определения изменений ориентации в определенных направлениях, но ошибки после интегрирования могут быть исправлены с использованием показаний магнитометра и/или данных оптического датчика/камеры 9. В других вариантах осуществления один или оба из магнитометра, гирометра и магнитометра могут применяться в различных комбинациях для определения ориентации.
[00124] В некоторых вариантах осуществления только ориентация может применяться для определения положения устройства 1 для гигиены полости рта с использованием статистического анализа, как раскрыто в настоящем документе. В других вариантах осуществления гирометр и/или акселерометр, обнаруживший инерционные изменения, может применяться в сочетании с показаниями магнитометра 11 или отдельно от них, чтобы обеспечить дополнительные индикаторы перемещения или расстояния для вычисления предполагаемого положения щетинок устройства 1 для гигиены полости рта. В некоторых вариантах осуществления информация об ориентации может быть объединена с данными, выводимыми с датчиков 11 или оптических датчиков 9, которые указывают поступательную инерцию или изменения положений. В зависимости от местоположения инерционного датчика информация об ориентации может быть объединена с данными об инерционном перемещении для указания положения щетинок. Например, если датчик 11 движения размещен внутри устройства 1 для гигиены полости рта, но в средней части продольной оси зубной щетки, где пользователь будет держать устройство 1 для гигиены полости рта, изменения ориентации приведет к перемещению головки без перемещения положения (хотя он может поворачиваться на своем месте) датчика 11 движения. Соответственно информация об ориентации может также использоваться для вычисления положения в пространстве щетинок относительно положения датчика 11.
[00125] Изменения перемещения или положений также могут быть вычислены на основе данных, выводимых магнитометром 11. В некоторых вариантах осуществления магнитометр 11 может обнаруживать магнитное поле, генерируемое передатчиком 110 магнитного поля в базовой станции 2 или другом неподвижном компоненте, который отделен от устройства 1 для гигиены полости рта. В этом варианте осуществления напряженность и ориентация магнитного поля, определяемого одно-, двух- или трехосевым магнитометром 11, могут обеспечить дополнительные данные о перемещении положения устройства 1 для гигиены полости рта относительно передатчика 110 магнитного поля в базовой станции 2, которая является зафиксированной и неподвижной. Соответственно увеличение или уменьшение магнитного поля будет указывать, что устройство 1 для гигиены полости рта перемещается к базовой станции 2 или от нее. Дополнительно изменения в ориентации или наклоне магнитного поля и его полярность, выводимые магнитометром 11, могут применяться для определения поступательного движения и положения. Эта информация может применяться для определения, на основе калибровочных или экспериментальных данных, насколько изменение напряженности магнитного поля на единицу эквивалентно расстоянию на основе направления перемещения (поскольку разные направления в магнитном поле будут иметь более высокие или более низкие скорости изменения). В других вариантах осуществления изменение наклона или формы магнитного поля на единицу также может быть связано с изменениями в положении. Соответствующая ориентация горизонтального магнитного поля может отличаться каждый раз при установке системы устройства для гигиены полости рта, раскрытой в настоящем документе, включая такую систему, которая содержит магнитометр в базовой станции 2. Это связано с тем, что то, как каждый пользователь стоит во время чистки с помощью щетки своих зубов и/или как ориентирована базовая станция 2 в верхней части рабочего стола, может изменяться для каждого пользователя и даже в какой-то степени меняться каждый раз и после очистки рабочей поверхности и т. д. Соответственно адаптивный статистический анализ может применяться для определения относительных положений щетинок устройства 1 для гигиены полости рта.
[00126] Данные о положении, вычисленные на основе данных магнитного поля, выводимых с магнитометра 11, могут быть объединены с данными об инерции для вычисления изменений положений в устройстве 1 для гигиены полости рта. В некоторых вариантах осуществления данные об инерции могут применяться для вычисления пройденного расстояния, и данные магнитометра также могут применяться для устранения ошибок и/или обеспечения границ в отношении вычислений для изменений положений на основе данных инерции. Например, изменения напряженности магнитного поля могут иметь определенное минимальное нижнее предельное значение, предполагая прохождение непосредственно перпендикулярно линиям магнитного поля, где они наиболее сжаты. Учитывая определенное изменение напряженности магнитного поля, можно определить, что магнитометр прошел по меньшей мере определенное евклидово расстояние в пространстве (или изменил определенную угловую ориентацию). Эти изменения наклона и напряженности поля могут применяться для определения изменений расстояния в определенных пределах погрешностей, которые могут быть дополнены или настроены согласно данным акселерометра или гирометра. Эти данные могут быть объединены с данными об ориентации и инерции для определения более точного пройденного расстояния и относительного направленного перемещения устройства 1 для гигиены полости рта.
Продолжительность чистки и положение во время чистки с помощью щетки - визуальное распознавание рисунков
[00127] В некоторых вариантах осуществления могут применяться оптический датчик/камера 9 и система 120 распознавания рисунка, чтобы отслеживать перемещение устройства 1 для гигиены полости рта. Например, как описано выше, устройство 1 для гигиены полости рта может содержать рисунки 120 на рукоятке 40 или головке 42, которые могут распознаваться системой визуального отслеживания. Система визуального отслеживания может быть выполнена с возможностью распознавания ориентации, расстояния и положения рисунка 120, который находится на устройстве 1 для гигиены полости рта. Например, в некоторых вариантах осуществления рисунок 120 может быть также на головке 42, и отдельный рисунок 120 может быть на рукоятке 40 для обеспечения возможности системе определять положение как рукоятки 40, так и головки 42 устройства 1 для гигиены полости рта, чтобы помочь в определении ориентации и перемещения. Визуальные распознавания рисунков применялись для обнаружения перемещения и ориентации маркеров, например, система, описанная в документе «Towards Positioning through Visual Markers» на имя Бернхарда Л. Эклбауэра, раскрытие которого включено посредством ссылки во всей своей полноте. Например, программное обеспечение для обработки изображений может идентифицировать границы устройства для гигиены полости рта по стандартным идентификаторам границ изображения, идентифицировать объекты надлежащих размеров и размер для зубной щетки, а затем попытаться определить ориентацию устройства для гигиены полости рта (или определить ориентацию рисунка 120 и устройства гигиены полости рта соответственно).
[00128] В некоторых вариантах осуществления система распознавания видимых рисунков также может применяться для определения положения и ориентации лица человека. Это полезно для сравнения относительного положения и ориентации лица и/или рта и устройства 1 для гигиены полости рта с целью определения положения устройства для гигиены полости рта относительно рта. В некоторых вариантах осуществления система может сначала получить изображение с помощью устройства 1 для гигиены полости рта на том же расстоянии от оптического датчика/камеры 9, что и лицо человека. Дополнительно первоначальная калибровка с использованием ориентации и размера лица может применяться для калибровки расстояния от камеры 9 до устройства 1 для гигиены полости рта, поэтому можно оценить размер и перемещение. В некоторых вариантах осуществления, поскольку размер устройства 1 для гигиены полости рта известен, можно определить относительный размер лица с помощью устройства 1 для гигиены полости рта, чтобы откалибровать или оценить форму и размер челюсти и изменить алгоритмы, применяемые для определения того, какая зона чистится с помощью щетки.
[00129] Например, система может определять, находится ли устройство 1 для гигиены полости рта во рту или рядом с ним, если систему можно применять для определения положения и ориентации лица. Это поможет системе проверить и подтвердить, когда использование начинается и прекращается, поскольку устройство 1 для гигиены полости рта будет находиться только вблизи рта пользователя, который фактически его использует. Редко пользователь держит щетку возле рта, когда он на самом деле не чистит свои зубы с помощью щетки. Скорее пользователь, как правило, сразу же моет/опускает устройство для гигиены полости рта после того, как он заканчивает чистку с помощью щетки.
[00130] Соответственно данные, обнаруженные камерой, могут быть оценены для определения положения, перемещения и ориентации устройства 1 для гигиены полости рта. Например, устройство 1 для гигиены полости рта может иметь код «AB» с кружком и линией, как проиллюстрировано на фиг. 6, либо на задней стороне головки 42, либо на рукоятке 40, либо на обоих из них. В некоторых вариантах осуществления рисунок 120 может быть любым другим рисунком 120, который имеет отличимую ориентацию, как описано в настоящем документе. Камера 9 может обнаруживать рисунок, и данные могут быть извлечены для обработки и анализа. Например, визуальные данные, обнаруживаемые камерой, могут быть выведены, и процессор может оценить данные, чтобы определить ориентацию и размер рисунка 120 и относительные размеры определенных частей рисунка 120.
[00131] Например, если рисунок представляет собой AB, и он ориентирован так, как показано, на задней части головки 42 устройства 1 для гигиены полости рта, и в ходе анализа данных определяется, что AB ориентирован вертикально, то, вероятно, пользователь не чистит с помощью щетки свои зубы. Это связано с тем, что это будет означать, что само устройство 1 для гигиены полости рта находится в вертикальном положении (как показано на фиг. 6), которое является крайне маловероятным положением для того, чтобы пользователь держал устройство 1 для гигиены полости рта с целью чистки с помощью щетки своих зубов. Скорее, продольная ось устройства 1 для гигиены полости рта, как правило, будет удерживаться в горизонтальной плоскости во время чистки зубов с помощью щетки. Однако, если камера 9 обнаруживает данные, указывающие, что АВ на головке устройства 1 для гигиены полости рта находится сбоку, это, вероятно, означает две вещи: (1) устройство 1 для гигиены полости рта расположено так, что задняя часть головки 42 устройства 1 для гигиены полости рта обращена к пользователю, потому что AB фактически виден для камеры 9, и (2) устройство 1 для гигиены полости рта расположено горизонтально, поскольку AB ориентирован на его стороне. Это, например, обеспечивает высокую вероятность того, что устройство 1 для гигиены полости рта чистит передние зубы. Это связано с тем, что камера 9 обычно расположена таким образом, что пользователь обращен к камере 9, когда чистит с помощью щетки свои зубы. Соответственно, если АВ виден для камеры 9 и лежит на боку, то устройство 1 для гигиены полости рта должно быть ориентировано так, что щетинки обращены ко рту (для чистки с помощью щетки передних поверхностей) и чистят передние зубы (а не боковые), потому что AB все еще виден для фронтальной камеры 9.
[00132] Однако во многих положениях устройства 1 для гигиены полости рта головка 42 устройства 1 для гигиены полости рта и любой связанный рисунок 120 могут быть не видны камере 9. Например, при чистке больших коренных зубов, языка, верхней или нижней поверхностей зубов рисунок 120 на задней части головки 42 не будет виден. Соответственно в некоторых вариантах осуществления дополнительный рисунок (дополнительные рисунки) 120 может быть включен (могут быть включены) в дополнительное приспособление 130 на конце устройства 1 для гигиены полости рта. Это позволит камере 9 обнаруживать ориентацию рисунка 120 на приспособлении 130 и/или рукоятке 40, когда устройство 1 для гигиены полости рта вставлено внутрь рта пользователя. Например, в некоторых вариантах осуществления дополнительное приспособление 130 может представлять собой шарик сферической формы на нижней части рукоятки 40 устройства 1 для гигиены полости рта и содержать несколько разных рисунков в разных положениях вокруг сферы.
[00133] Это позволит камере обнаруживать положение и ориентацию нескольких разных рисунков. После визуального обнаружения рисунка система может определить, (1) какой рисунок 120 подлежит обнаружению, (2) размер рисунка 120, (3) ориентацию рисунка 120, (4) относительный размер разных компонентов рисунка 120, (5) другие характеристики рисунка 120. Эту информацию можно загрузить и сравнить с существующими данными, касающимися типов и ориентации рисунков 120, которые размещены на дополнительном приспособлении 130 (и/или рукоятке 40 или головке 42 устройства 1 для гигиены полости рта). Например, система может содержать базу данных, которая хранит каждый из разных рисунков 120 и разную информацию о размере и ориентации относительно рисунка 120 по отношению к устройству 1 для гигиены полости рта и расстоянию от камеры 9. Например, каждый рисунок 120 может содержать информацию о том, находится ли он в вертикальной ориентации, в таком случае устройство для гигиены полости рта находится на своей стороне, во рту и т. д. В других вариантах осуществления размер обнаруженного рисунка 120 может быть приравнен к расстоянию устройства 1 для гигиены полости рта от камеры 9, предполагая заданное расстояние. В некоторых вариантах осуществления информация калибровки может быть дополнительно добавлена для улучшения системного анализа данных чистки с помощью щетки для конкретного человека и/или конкретной ванной комнаты. Следовательно, каждый рисунок 120 может иметь номер пикселя, связанный с каждым компонентом (например, высоту/ширину определенных элементов), который может быть связан с определенным расстоянием от камеры 9. Это может быть приблизительное или среднее значение, или используется статистика, чтобы найти расстояние/ориентацию наибольшей вероятности.
[00134] Затем, после определения этой информации о рисунке, ее можно сравнить с информацией калибровки или другими данными, представляющими рисунки 120 и соответствующие ориентации, которые включены, например, в дополнительное приспособление 130. Если, например, рисунок 120 АВ включен в дополнительное приспособление 130, как проиллюстрировано на фиг. 6, с вертикальной ориентацией и обращен вперед в том же направлении, что и щетинки, и если этот рисунок обнаружен в вертикальном положении, маловероятно, что пользователь чистит с помощью щетки свои зубы. Однако, опять же, если этот рисунок 120 обнаружен с боковой ориентацией, вероятно, пользователь чистит с помощью щетки свои передние большие коренные зубы. В другом примере, если другой рисунок BC размещен в нижней части зубной щетки, когда система обнаруживает этот рисунок, вероятно, что устройство для гигиены полости рта используется для очистки больших коренных зубов. Соответственно ориентация BC может затем использоваться для определения, чистит ли пользователь верхние части, нижние части или боковые части больших коренных зубов. В некоторых вариантах осуществления это может быть объединено с данными акселерометра и гирометра для определения, какая сторона рта чистится с помощью щетки.
[00135] В еще одном варианте осуществления система может быть выполнена с возможностью определения положения устройства для гигиены полости рта (без рисунка) относительно лица, включая направление вектора его продольной оси. Соответственно система может затем определить, находится ли устройство для гигиены полости рта на левой или правой стороне рта. Это может быть сделано с использованием системы визуального распознавания, как раскрыто в настоящем документе. В других вариантах осуществления система может определять положение и ориентацию рта и устройства для гигиены полости рта относительно друг друга. Например, алгоритм распознавания рта может использоваться для аппроксимации положения каждого из углов или сторон рта. Дополнительно на шейке устройства 1 для гигиены полости рта могут быть видимые маркеры, помогающие системе определить, какая сторона рта чистится с помощью щетки, когда пользователь держит устройство для гигиены полости рта внутри рта.
Отсутствие рисунка на зубной щетке
[00136] Как проиллюстрировано на фиг. 7 и в некоторых вариантах осуществления, система может обнаруживать только контур рукоятки устройства 1 для гигиены полости рта для определения ориентации продольной оси относительно плоскости притяжения без использования рисунка 120 или маркеров. В других вариантах осуществления система может иметь дополнительное программное обеспечение для обработки изображений, чтобы идентифицировать конкретные признаки устройства для гигиены полости рта, включая головку (щетинки и т. д.), с использованием алгоритмов классификации для классификации определенных частей изображения. В некоторых вариантах осуществления программное обеспечение для обработки изображений идентифицирует продольную ось, головку, основание и потенциально щетинки. На основе этой информации можно определить ориентацию и положение устройства для гигиены полости рта. В некоторых вариантах осуществления пользователь и рот пользователя могут быть идентифицированы с использованием аналогичного программного обеспечения для обнаружения границ/классификации формы. Соответственно может быть определено относительное положение устройства для гигиены полости рта относительно рта, как объяснено далее в настоящем документе.
[00137] Авторы изобретения могут использовать эту систему таким образом, что нет необходимости в кастомизированном устройстве для гигиены полости рта, а в устройстве для гигиены полости рта, которое содержит датчики 11 движения, должна быть предусмотрена только микросхема. Соответственно устройство может быть изготовлено путем использования существующих конструкций устройства для гигиены полости рта и реализации только системы 13 микросхемы или контроллера, которая содержит датчик 11 движения, антенну 5 или другое беспроводное средство соединения и память. Затем устройство может отправлять все данные на подключенный смартфон или другое подключенное устройство 30 (например, умное зеркало и т. д.).
Объединение визуальных данных и данных движения для определения местоположения
[00138] Визуальные данные также можно использовать для определения ускорения и вектора или направления движения устройства 1 для гигиены полости рта, когда оно чистит зубы. Визуальные данные могут захватывать разные положения и данные отметок времени для определения количества времени, записанного для перемещения с первой точки во вторую точку и, следовательно, получившуюся в результате скорость перемещения (направление и скорость) и ускорение. Как описано в настоящем документе, данные о положении могут применяться для вычисления положений во время чистки с помощью щетки. В сочетании с данными об ориентации они смогут обеспечить достаточно данных о положении и ориентации для определения положения во рту пользователя и очищаемой секции рта, как описано в настоящем документе.
[00139] Например, в некоторых вариантах осуществления визуальная информация на основе распознаваний рисунков или контуров щетки может применяться для повторной калибровки или вывода положения на основе определения положения акселерометра/магнитометра/гирометра. В этих вариантах осуществления визуальные данные могут применяться для повторной калибровки дрейфа, испытываемого датчиками положения, чтобы вернуть их обратно в эталонную систему координат. В других вариантах осуществления визуальные данные могут применяться для повторной калибровки всей статистической модели, используемой для определения положения.
[00140] В некоторых вариантах осуществления положение может быть независимо определено на основе датчиков движения/ускорения/положения и независимо определено на основе данных визуального распознавания. Эти два определения могут затем применяться для определения окончательного положения относительно рта. В других вариантах осуществления только сами данные визуального распознавания могут применяться для вычисления положения относительно рта.
[00141] Например, первым примером будет установка без видимого рисунка 120, добавленного к устройству 1 для гигиены полости рта. Используя данные, выводимые только датчиком (датчиками) 11 движения, в некоторых ситуациях может быть затруднительно определить, на какой стороне рта находится устройство 1 для гигиены полости рта, когда устройство для гигиены полости рта ориентировано в том же направлении, но может чистить разные секции зубов. Например, его ориентация вокруг оси идентична или почти идентична, но его положение на одной стороне лица находится на левой или правой стороне рта.
[00142] Например, неоднозначное определение может быть следующим: пользователь чистит с помощью щетки внешнюю поверхность зубов с левой стороны рта или пользователь чистит с помощью щетки внутреннюю поверхность зубов с правой стороны рта. Даже без дополнительного визуального рисунка 120, благодаря визуальной информации устройства для гигиены полости рта и самого лица пользователя система может различать левую и правую стороны. Таким образом, комбинация алгоритмов в этом случае выгодна тем, что известно, что данных об инерции недостаточно для установления относительного пространственного положения в системе координат, окружающей голову. Таким образом, визуальная информация может применяться для вторичного определения, на какой стороне головы находится щетка, и, следовательно, визуальная информация и информация об ориентации (относительно оси или точки или относительно плоскости притяжения) могут быть объединены для определения, на какой стороне головы находится устройство 1 для гигиены полости рта и используется ли оно (например, с происходит чистка с помощью щетки внутренней или внешней поверхности зубов).
[00143] Другой пример может включать вариант с рисунком 120, расположенным на устройстве 1 для гигиены полости рта. Например, рисунок 120 может быть добавлен к нижней части устройства 1 для гигиены полости рта и к задней части головки устройства 1 для гигиены полости рта. Однако с использованием рисунка 120 могут быть положения устройства 1 для гигиены полости рта, в которых одной визуальной информации будет недостаточно для определения местоположения и ориентации устройства 1 для гигиены полости рта с достаточной точностью. Например, когда визуальные метки частично скрыты или слишком малы в разрешении изображения, чтобы их можно было точно обнаружить по размеру и ориентации.
[00144] Например, если пользователь чистит с помощью щетки большие коренные зубы, и единственный видимый рисунок 120 находится в нижней части устройства 1 для гигиены полости рта, а разрешение низкое (например, потому что пользователь находится слишком далеко от устройства камеры, или потому что пользователь использует камеру с недостаточным разрешением), то система не может определить с достаточной точностью угол, под которым устройство 1 для гигиены полости рта находится на зубах. Следовательно, система не может определить, чистит ли пользователь с помощью щетки наружную поверхность больших коренных зубов верхней челюсти или наружную поверхность больших коренных зубов нижней челюсти.
[00145] В этом случае разность углов (например, угол продольной оси устройства для гигиены полости рта относительно плоскости притяжения, поскольку устройство для гигиены полости рта держат под немного другим углом при чистке с помощью щетки верхних или нижних больших коренных зубов) может быть довольно малозаметной между этими двумя положениями во время чистки с помощью щетки. Однако данные о движении (особенно ускорение и вертикальная ориентация) могут устранить неоднозначность двух потенциальных положений, ограниченных визуальными данными, и, следовательно, предоставить необходимую информацию о том, чистит ли устройство 1 для гигиены полости рта верхнюю или нижнюю челюсть. Соответственно сами по себе визуальные данные могут быть дополнены данными о движении для определения положения или секции очищаемых зубов.
Продолжительность чистки и положение во время чистки с помощью щетки - анализ данных движения
[00146] Для того, чтобы применять данные с датчиков для оценивания количества времени, проведенного в каждой секции, четверти или другом логическом отделении рта, пользователю может потребоваться откалибровать устройство 1 для гигиены полости рта. В некоторых вариантах осуществления калибровка может быть выполнена на заводе, пользователем или обоими этими путями. Соответственно калибровка может применяться для калибровки специально изготовленного блока и для адаптации к территории, анатомии (т. е. росту) и/или среде ванной комнаты конкретного пользователя, которые, например, могут включать уникальные магнитные помехи, уникальные высоты и ориентации (поверхности стола могут не быть на одном уровне и т. д.). Например, в некоторых вариантах осуществления пользователь может наносить цветной гель на свои зубы. Затем пользователь может повернуть устройство 1 для гигиены полости рта в режиме калибровки, как только устройство 1 для гигиены полости рта окажется в положении возле зубов, и стереть весь цветной гель, в то время как датчики 11 движения, оптический датчик (оптические датчики) 9 и другие датчики записывают данные.
[00147] В этот момент пользователь может отключить калибровку, чтобы остановить получение данных калибровки. В других вариантах осуществления, когда пользователь включает функцию калибровки, устройство 1 для гигиены полости рта обнаруживает моменты времени, когда пользователь начал и закончил чистку с помощью щетки, включая любые паузы при чистке с помощью щетки. Эта процедура калибровки предоставляет эталонные данные калибровки положения, ориентации и движения, которые затем можно сравнить с последующими щетками, используя статистический анализ 78 или другие способы анализа, чтобы определить, почистили ли последующие щетки все области рта в течение достаточного времени.
[00148] После калибровки устройства или с использованием эталонных данных после предыдущей чистки с помощью щетки или чистки с помощью щетки другой модели пользователей данные чистки с помощью щетки после каждого использования могут сравниваться с эталонными данными для оценки ее качества 78 и определения положения устройства 1 для гигиены полости рта по вновь полученным данным. Например, данные калибровки могут применяться для подготовки статистической модели формы и размеров рта конкретного пользователя и использоваться для создания определенных статистических границ для определения, когда устройство 1 для гигиены полости рта чистит какую-либо определенную секцию рта пользователя. Затем, после инициирования пользователем чистки с помощью щетки во второй раз, вновь записанные данные могут затем накладываться на данные калибровки чистки с помощью щетки, связанные с теми пользовательскими параметрами 60, или соотноситься с ними для определения, были ли какие-либо недостатки в чистке с помощью щетки и когда они были. Например, система 100 может определять, сколько времени затрачивается на чистку с помощью щетки каждой четверти, количество проходов, или выполнять другие оценивания чистки с помощью щетки. Дополнительно анализ может указывать на то, что пользователь слишком много чистил с помощью щетки определенные области, или что не использовал правильные схемы проходов в целом или в определенных секциях рта пользователя.
[00149] Корреляция может быть выполнена посредством статистического анализа, например, количественное сравнение таких различий может быть сделано просто путем измерения евклидова расстояния в пространстве 3xz. Такие векторы могут затем обрабатываться с использованием статистического анализа, включая анализ главных компонентов (PCA), иерархический кластерный анализ (HCA), регрессионный анализ и линейный дискриминантный анализ. Могут применяться статистические методы, подходящие для данных с высокой размерностью. В качестве примера, в HCA систематически исследуется расстояние между данными, которые представляют каждый тип движения или данные о положении. Затем может быть сгенерирована дендрограмма, которая показывает кластеризацию данных по евклидовым расстояниям между векторами данных и среди них, во многом подобно родовому дереву.
[00150] Каждый кластер статистических данных может представлять данные датчика для каждой секции, четверти или другого логического отделения рта пользователя. Например, рот может быть разделен на верхнюю и нижнюю части, причем верхняя и нижняя части имеют правую, переднюю и левую части, и каждая из правой, передней и левой частей имеет внутреннюю, верхнюю и наружную поверхность. Соответственно рот может иметь 36 разных секций, 10 секций, 8 секций, 12 секций или 4 секции (четверти), только верхнюю и нижнюю часть, только внешнюю и внутреннюю части и другие логические отделения. Соответственно, используя эталонные данные, контроллер 13 или другие процессоры в системе 100 (например, процессоры в мобильном телефоне или серверах) могут вычислять доверительный интервал или другое значение, указывающие вероятность того, что устройство для гигиены полости рта чистит конкретную секцию рта пользователя, и при этом определять вероятность того, что проходы связаны с данными калибровки в этих секциях или относятся к ним. Чтобы получить эталонное положение, пользователю может быть предоставлено указание начать чистку с помощью щетки в идентичном положении рта. Таким образом, данные начинаются с известного положения и могут использовать его в качестве эталонной точки для соотнесения с остальными данными с использованием статистического анализа. Например, угол, ориентация, вычисленное расстояние и другие признаки из эталонного положения устройства 1 для гигиены полости рта, обнаруживаемого датчиком 11 движения и/или оптическим датчиком/камерой 9, могут указывать на вероятность того, что каждое новое положение связано с определенным положением рта на основе данных калибровки.
[00151] В других вариантах осуществления система 13 управления или другие процессоры системы (например, процессоры в смартфоне, серверы или другие компоненты) могут обрабатывать статистические данные и определять, что щетка чистит определенную секцию рта, если статистический анализ показывает с достоверностью больше чем 95%, 85% 80% или другой подходящей достоверностью, что щетка находится в секции рта. В некоторых вариантах осуществления специфичность или чувствительность статического анализа чистки с помощью щетки может быть изменена для сравнения разницы конкретного пользователя.
[00152] Этот анализ может включать выходные данные 80, которые позволяют системе 13 управления или другим процессорам определять, какие проходы щетки осуществлялись в каждой секции рта или ряда зубов, и, следовательно, сколько времени пользователь тратил на чистку каждой четверти, половины или зуба, или другого логического отделения рта, и как это время сравнивается с рекомендованными схемами. В других вариантах осуществления время в начале и конце вхождения в определенную область может быть записано, или применяются другие подходящие способы для определения того, сколько времени затрачивается на чистку с помощью щетки каждой секции рта.
[00153] В некоторых вариантах осуществления вместо обнаружения положения зубной щетки система 100 может предоставить пользователю указание чистить с помощью щетки определенные секции рта по одной и определять только то, действительно ли пользователь осуществляет чистку с помощью щетки, а также подсчитывать или записывать время чистки с помощью щетки только при обнаружении движения, указывающего на чистку с помощью щетки. Затем, после записи чистки с помощью щетки в направленной секции в течение предписанного времени, система 100 будет указывать пользователю на то, что пришло время перейти к следующей секции рта, и на время, затраченное пользователем для фактической чистки с помощью щетки. Это препятствует тому, чтобы пользователь делал перерывы и тем самым осуществлял чистку с помощью щетки в течение меньшего времени по сравнению с оптимальным количеством времени в каждой секции. Соответственно система 13 управления или другие процессоры могут анализировать данные с датчиков 11 (или датчика 10 давления) для записи количества времени, в течение которого пользователь осуществлял чистку с помощью щетки в каждой секции, в то время как система 100 указывает, что пользователь должен осуществлять чистку с помощью щетки в этой конкретной секции.
[00154] В других вариантах осуществления давление, оказываемое на головку 42 при чистке с помощью щетки, также может обнаруживаться датчиком 10 давления, встроенным в устройство 1 для гигиены полости рта. Например, датчик 10 давления может быть встроен в головку 42 и обнаруживать давление, связанное с использованием. Дополнительно давление может быть сопоставлено с различными данными о положении, и, следовательно, контроллеры 13 или другие процессоры системы 100 могут вычислять величину давления, используемого для чистки с помощью щетки каждой области рта.
Машинное обучение
[00155] В некоторых примерах статистический анализ, используемый для реализации различных признаков, раскрытых в системе 100, представляет собой алгоритм машинного обучения или искусственного интеллекта. Например, система 100 может обрабатывать доступные источники данных с датчиков 100 систем, включенных, как раскрыто в настоящем документе, и идентифицировать положение во рту. В других примерах алгоритмы машинного обучения могут использоваться для: (1) идентификации полостей или зубного налета с использованием машинного зрения или других комбинаций данных, (2)идентификации положения во рту с различными степенями детализации, (3) идентификации типа прохода щеткой с использованием словаря проходов, раскрытого в настоящем документе, (4) идентификации пользователей на основе данных о движении или изображении (например, машинного зрения для распознавания черт лица) или (5) других полезных применений в отношении признаков, описанных в настоящем документе.
[00156] Алгоритмы машинного обучения могут принимать различные формы. Например, система 100 может использовать более базовые инструменты машинного обучения, включая 1) деревья решений («DT»), (2) байесовские сети («BN»), (3) искусственную нейронную сеть («ANN») или (4) методы опорных векторов («СВМ»). В других примерах могут использоваться алгоритмы глубокого обучения или другие более сложные алгоритмы машинного обучения.
[00157] Программы DT обычно используются из-за их простоты и легкости понимания. DT — это графы классификации, которые сопоставляют входные данные с вопросами, задаваемыми на каждом последующем этапе в дереве решений. В программе DT происходит перемещение вниз по «ветвям» дерева, основываясь на ответах на вопросы (например, Первая ветвь: Пациентом является мужчина? да или нет. Вторая ветвь: У пациента есть проблемы с мочеиспусканием? да или нет. и т. д.).
[00158] Байесовские сети («BN») основаны на вероятности того, что что-то истинно на основе заданных независимых переменных, и моделируются на основе вероятностных отношений. BN основаны исключительно на вероятностных отношениях, которые определяют вероятность одной переменной на основе другой или других. Например, BN может моделировать отношения между симптомами и заболеваниями. В частности, если известны симптомы или биомаркерные уровни пациента, BN может использоваться для вычисления вероятности того, что у пациента есть конкретное заболевание. Таким образом, используя эффективный алгоритм BN, можно сделать вывод на основе входных данных. Они обычно используются в медицинской сфере для представления аргументации при неопределенных условиях для широкого круга применений, включая диагностику заболеваний, генетическое консультирование и структуру вспомогательной системы поддержки принятия медицинских решений (MDSS).
[00159] Искусственные нейронные сети («ANN») — это вычислительные модели, основанные на центральной нервной системе животного организма. Они сопоставляют входные данные с выходными данными через сеть узлов. Однако, в отличие от BN, в ANN узлы не обязательно представляют какую-либо фактическую переменную. Соответственно ANN могут иметь скрытый слой узлов, которые не представлены известной переменной для наблюдателя.
[00160] ANN способны к распознаванию рисунков и используются в медицинской и диагностической областях. Их вычислительные методы облегчают понимание сложного и неясного процесса, который может происходить во время диагностики заболевания на основе входных данных, разнообразных входных данных, включая симптомы. Несмотря на резкие ограничения, ANN продемонстрировали свою пригодность для структуры CDSS (система поддержки принятия клинических решений) и других биомедицинских применений, таких как диагностика инфаркта миокарда, MDSS для лечения лейкемии и обнаружения рака.
[00161] Методы опорных векторов («SVM») возникли из концептуальной схемы, в которой используется статистика машинного обучения и векторные пространства (концепция линейной алгебры, которая обозначает размерность в линейном пространстве), снабженные некоторой структурой, связанной с ограничениями. В некоторых случаях они могут определить новую систему координат, которая легко разделяет входные данные на две классификации. Например, в SVM может идентифицироваться линия, которая разделяет два набора точек, возникающих из разных классификаций событий.
[00162] Они применяются практически и являются теоретически обоснованными, но иногда могут быть трудны для понимания. SVM применялись для ряда биологических областей, таких как MDSS, для диагностики туберкулезной инфекции, классификации опухолей и обнаружения биомаркеров.
[00163] Однако существует относительно новый тип алгоритма машинного обучения, который способен моделировать очень сложные отношения, которые имеют много вариаций, называемых глубокими нейронными сетями (DNN). Недавно были разработаны глубокие нейронные сети для решения проблем распознавания речи.
[00164] В области индустрии информационных технологий многими исследователями в течение последних нескольких десятилетий были предложены различные архитектуры DNN для решения проблем, связанных с такими алгоритмами, как ANN. К этим типам DNN относятся CNN (сверточная нейронная сеть), RBM (ограниченная машина Больцмана), LSTM (долгая кратковременная память) и т. д. Все они основаны на теории ANN. Они демонстрируют лучшую производительность, преодолевая проблему сокращения ошибок обратного распространения, связанную с ANN.
Машинное обучение — обучающие данные
[00165] Алгоритмы машинного обучения требуют обучающих данных для идентификации рассматриваемых признаков, для обнаружения которых они предназначены. Например, различные способы могут применяться для формирования моделей машинного обучения, включая применение случайно назначенных начальных весовых значений для сети и применение градиентного спуска с использованием обратного распространения для алгоритмов глубокого обучения. В других примерах нейронная сеть с одним или двумя скрытыми слоями может использоваться без обучения с использованием этой техники.
[00166] В некоторых примерах алгоритмы машинного обучения обучаются с использованием помеченных данных или данных, которые представляют определенные признаки, конкретные действия или характеристики, включая определенное положение во рту, конкретный проход щетки, конкретного пользователя и другое. В некоторых примерах обучающие данные предварительно фильтруются или анализируются для определения определенных признаков, включая различные высокоуровневые фильтры или начальные точки, которые включают данные обнаружения движения (щетка взята в руки, щетка обращена в определенном направлении относительно плоскости притяжения). В других примерах данные помечаются только конечным результатом, и различные соответствующие данные могут быть введены для обучения алгоритма машинного обучения.
[00167] Например, для идентификации положения во рту могут применяться различные алгоритмы машинного обучения, которые получают различные данные, раскрытые в настоящем документе, включая движение (выходные данные акселерометра, выходные данные гироскопа, выходные данные магнитометра), визуальные данные с камеры на базовой станции 2 или другие данные, имеющие отношение к положению устройства 1 для гигиены полости рта во время чистки зубов с помощью щетки. Например, в некоторых вариантах осуществления входные данные для определения положения зубной щетки могут включать только данные, выводимые с датчиков на устройстве 1 для гигиены полости рта. Например, в некоторых примерах входные данные помечаются данными только с датчика ускорения.
[00168] В других примерах для идентификации положения входными данными могут быть различные комбинации помеченных данных, выводимых с акселерометра, магнитометра и гироскопа. В некоторых примерах начальные и конечные точки входных данных являются довольно важными. В некоторых примерах входные данные могут представлять собой комбинацию данных, выводимых с датчиков на устройстве для гигиены полости рта и датчиков на базовой станции 2, например, систем визуального распознавания или восприятия глубины.
[00169] Подобным образом, для систем 100, которые идентифицируют типы проходов щетки (например, конкретные действия), системы могут использовать машинное обучение на основе комбинаций данных, выводимых с различных датчиков. В некоторых примерах данных, выводимых только с акселерометра, может быть достаточно для идентификации проходов щетки. Это, в частности, происходит из-за того, что большинство проходов щетки характеризуются конкретной схемой ускорения, которая повторяется, и могут включать информацию об угловом положении относительно плоскости притяжения, как раскрыто в настоящем документе.
[00170] В системах 100, которые идентифицируют пользователей, алгоритмы машинного обучения могут применяться для обнаружения лица пользователя и идентификации пользователя посредством уникальных параметров. В этих примерах пользователь может сначала использовать систему, которая содержит базовую станцию 2 с камерой 56, которая может делать начальный снимок пользователя. Пользователь может затем указывать свой выбор параметров, и в системе может использоваться тот снимок для идентификации этого пользователя в будущем. Со временем система может получать дополнительные фотографии или видео пользователя, чтобы сделать идентификацию пользователя более надежной (например, больше помеченных обучающих наборов).
Машинное обучение - получение обучающих данных
[00171] В некоторых примерах, присваивание метки обучающим данным может включать операторов, просматривающих данные, которые записаны, в то время как видеокамера захватывает изображения пользователя. В других примерах с помощью пользовательского запроса пользователю сообщается (1), где осуществлять чистку с помощью щетки и (2) потенциально тип прохода щетки (например, другие конкретные действия), чтобы использовать его для обучения системы. Например, в некоторых примерах система 100 может использовать тренера или другого инструктора со схематическим изображением рта, которые могут выделять, подсвечивать или иным образом указывать пользователю, где осуществлять чистку с помощью щетки. Эти команды могут отображаться, например, на дисплее мобильного устройства.
[00172] Соответственно автоматическая система команд может использоваться для получения обучающих данных для конкретного пользователя (для персонализации алгоритма) или для многих пользователей. Например, в случае, когда в системе 100 задействуется мобильное устройство 30, система может отображать схематическое изображение зубного ряда пользователя на экране мобильного устройства 30 и указывать последовательно, в режиме реального времени, какие области пользователь должен чистить с помощью щетки,. Затем система может записывать данные как помеченные обучающие данные, при этом каждый набор данных указывает на определенное положение во рту.
[00173] Дополнительно система 100 может указывать тип используемого прохода щетки, включая проход по кругу, назад и вперед или более сложные проходы, как раскрыто в настоящем документе. Соответственно все они будут предоставлять входные обучающие данные для системы 100, чтобы узнать, как идентифицировать положения во рту и определенные проходы щетки.
[00174] Однако в некоторых примерах может потребоваться отфильтровать входные данные после получения по образцу тренера, уменьшить размерность перед предоставлением помеченных данных в алгоритм для разработки модели. Например, анализ главных компонентов или другой способ уменьшения размерности могут быть реализованы перед предоставлением помеченных данных в алгоритм (алгоритмы).
[00175] В других примерах различные фильтры могут применяться для фильтрации данных перед присваиванием метки и вводом данных в качестве обучающих данных. Например, если разрабатывается модель машинного обучения для идентификации положения, система может отфильтровывать различные ускорения, которые включают быстрые изменения времени, или периодические ускорения, которые относятся к проходам щетки, а не к положению. Подобным образом, для проходов щетки могут отфильтровываться ускорения, которые являются устойчивыми (например, гравитационными), и только периодические ускорения будут анализироваться или предоставляться в систему. В других примерах данные могут не подвергаться предварительной фильтрации, и чувствительные алгоритмы глубокого обучения могут надежно определять положение с помощью дополнительных данных.
[00176] В других примерах данные могут быть предварительно отфильтрованы или впоследствии отфильтрованы (позже отклонены после анализа) в случае, если пользователь выполняет какое-то действие неправильно или не в соответствии с командами, отображаемыми на мобильном телефоне 30 или другом дисплее устройства. Дополнительно различные фильтры или техники могут применяться для определения того, когда пользователь находится в правильном положении и выполняет команды, например, после обнаружения периодической чистки с помощью щетки (например, с периодическим изменением ускорения).
Представление сигнала обратной связи
[00177] После анализа контроллером (контроллерами) 13 системы 100 или другими процессорами, содержащимися в смартфоне, серверами или другими компонентами системы 100 данных 78 об использовании, сигнал обратной связи может быть представлен пользователю 80 через динамик 50, визуальные индикаторы 52 на устройстве 1 для гигиены полости рта или через связанное мобильное устройство 30 или другое вычислительное устройство в ходе обмена данными с системой 100. Этот сигнал обратной связи может быть представлен мгновенно или открыт для доступа для проверки прогресса.
[00178] Например, мгновенный сигнал обратной связи может быть предоставлен пользователю 80 во время чистки с помощью щетки и содержит указания с помощью аудио или визуальных средств, которые указывают, сколько времени осталось, чистить ли сильнее или мягче, были ли определенные четверти в достаточной степени очищены с помощью щетки, и когда чистка с помощью щетки завершена. Например, через динамик 50 может быть получен красный свет или звук остановки, чтобы указать, что чистка с помощью щетки завершена.
[00179] Дополнительно хронологическое и среднее время чистки с помощью щетки и данные о положении могут быть представлены пользователю 80 на мобильном устройстве или другом вычислительном устройстве с использованием графиков, диаграмм, процентов и других систем измерения. Например, пользователю может быть представлено среднее время, потраченное в день на одну четверть, и среднее количество дней, когда пользователь осуществляет чистку с помощью щетки один раз, два раза или другое количество раз. Дополнительно среднее время, затрачиваемое на чистку зуба с помощью щетки, может быть рассчитано и представлено пользователю на мобильном устройстве 30 или другом вычислительном устройстве. Программа 15, работающая на мобильном устройстве, может управлять представлением данных, используя контроллер 13 мобильного устройства 30.
[00180] В некоторых примерах система может объединять отфильтрованное и обработанное положение и идентификаторы прохода щетки, а также идентификаторы потенциального зубного камня для обеспечения всестороннего сигнала обратной связи. Например, в некоторых примерах сигнал обратной связи относится не только ко времени в каждом положении рта, но и включает проходы, используемые в каждом положении рта. В некоторых примерах определенные техники проходов представляют пользователю большее количество сигналов обратной связи или определенные проходы, которые используются в определенных положениях во рту.
[00181] Соответственно, как показано на фиг. 9A и 9B, для приложения в соответствии с некоторыми вариантами реализациями может использоваться дисплей 910 мобильного устройства 30, который может содержать карту 920 интенсивности или другое визуальное представление положений, в которых пользователь осуществлял чистку с помощью щетки, точность чистки с помощью щетки в каждом положении и количество времени, а также тип используемого прохода. Эта информация может предоставить пользователю несколько целей для улучшения чистки с помощью щетки.
[00182] Обращаясь к фиг. 10, система 1000 для гигиены полости рта содержит устройство 1002 для гигиены полости рта, датчик 1004, устройство 1006 отображения, процессор 1008, запоминающее устройство 1010 и модуль 1012 связи. Система 1000 для гигиены полости рта обычно используется для содействия соблюдению схемы гигиены полости рта путем исполнения связанного приложения с использованием процессора 1008 и запоминающего устройства 1010 и отображения приложения на устройстве 1006 отображения.
[00183] Устройство 1002 для гигиены полости рта является таким же или аналогичным устройству 1 для гигиены полости рта (фиг. 3А), описанному выше, и в более общем случае может представлять собой любую обычную ручную зубную щетку или электрическую зубную щетку. Устройство 1002 для гигиены полости рта содержит головку 1002a и рукоятку 1002b (фиг. 13B). Датчик 1004 обычно используется для отслеживания движения устройства 1002 для гигиены полости рта. Датчик 1004 может представлять собой оптический датчик, камеру, датчик давления, датчик движения, датчик приближения, датчик восприятия глубины, гирометр, датчик магнитометра, любой другой подходящий датчик или любую их комбинацию.
[00184] Устройство 1006 отображения обычно используется для отображения неподвижных изображений, видеоизображений или обоих из них. Устройство 1006 отображения может представлять собой, например, устройство отображения, смартфон, планшет, ноутбук, умные часы, телевизор, умное зеркало или любое другое подходящее устройство отображения. Устройство 1006 отображения может также содержать интерфейс пользователя для приема входных данных от пользователя, такой как, например, сенсорный интерфейс, графический интерфейс пользователя, аппаратный интерфейс или т. п., или любую их комбинацию.
[00185] Запоминающее устройство 1010 хранит команды (например, связанное программное приложение), которые могут исполняться процессором 1008. Датчик 1004, устройство 1006 отображения, процессор 1008 и запоминающее устройство 1010 подключены друг к другу с возможностью связи. Хотя датчик 1004, процессор 1008, запоминающее устройство 1010 и устройство 1006 отображения показаны как отдельные компоненты, датчик 1004, процессор 1008, запоминающее устройство 1010 или любая их комбинация могут быть включены в один корпус (например, в смартфоне). Альтернативно процессор 1008 и запоминающее устройство 1010 могут быть включены в контроллер (не показан), который является таким же или аналогичным контроллеру 13, описанному выше.
[00186] В некоторых вариантах реализации датчик 1004, устройство 1006 отображения, процессор 1008, память 1010 и модуль 1012 связи могут быть интегрированы в один корпус 1014. В некоторых вариантах реализации корпус 1014 представляет собой смартфон. Смартфон может дополнительно содержать динамик (не показан), источник света (например, светодиодный индикатор), камеру (например, фронтальную камеру), микрофон или тому подобное, или любую их комбинацию. Альтернативно датчик 1004, устройство 1006 отображения, процессор 1008, память 1010, модуль 1012 связи или любая их комбинация могут быть отделены друг от друга как отдельные компоненты. Например, корпус 1014 может содержать устройство 1006 отображения, память 1008, процессор 1010 и модуль 1012 связи, в то время как датчик 1004 является отдельным компонентом (например, автономным датчиком, который является частью базовой станции для устройства 1002 для гигиены полости рта). Таким образом, различные комбинации основных компонентов, описанных в настоящем документе, могут быть интегрированы в корпус 1014.
[00187] Обращаясь к фиг. 11A и 11B, схематическое изображение 1100 и таймер 1102 отображаются на устройстве 1006 отображения. Как правило, процессор 1008 исполняет связанное программное приложение, чтобы схематическое изображение 1100 и таймер 1102 отображались на устройстве 1006 отображения.
[00188] Схематическое изображение 1102 представляет по меньшей мере часть ряда зубов пользователя. Как показано, схематическое изображение 1102 содержит ряд верхнечелюстных зубов 1110 и ряд нижнечелюстных зубов 1120. Ряд верхнечелюстных зубов 1110 разделен на несколько верхнечелюстных секций 1112, и ряд нижнечелюстных зубов 1120 также разделен на несколько нижнечелюстных секций 1122. Как показано, каждое из нескольких верхнечелюстных секций 1112 и нескольких нижнечелюстных секций 1122 содержит четыре секции, имеющие по существу одинаковый размер. Каждая из нескольких верхнечелюстных секций 1112 содержит окклюзионную поверхность 1114, внутреннюю поверхность 1116 и внешнюю поверхность 1118. Подобным образом, каждая из нескольких нижнечелюстных секций 1122 содержит окклюзионную поверхность 1124, внутреннюю поверхность 1126 и внешнюю поверхность 1128.
[00189] В некоторых вариантах реализации несколько верхнечелюстных секций 1112 и/или несколько нижнечелюстных секций 1122 могут дополнительно содержать представления отдельных зубов (не показаны). В то время как схематическое изображение 1102 показано как включающее виды сверху ряда верхнечелюстных зубов 1110 и ряда нижнечелюстных зубов 1120, предусмотрены другие виды и ориентации ряда зубов. Например, схематическое изображение 1100 может включать виды спереди или сбоку верхнечелюстных зубов, нижнечелюстных зубов, или оба из них. Кроме того, в некоторых вариантах реализации схематическое изображение 1012 включает только часть ряда зубов пользователя. Например, схематическое изображение 1100 может содержать только ряд верхнечелюстных зубов 1110, ряд нижнечелюстных зубов 1120 или любое количество нескольких верхнечелюстных секций 1112 или нижнечелюстных секций 1122 (например, одну секцию, три секции и т. д.), или любую их комбинацию. Кроме того, хотя схематическое изображение 1100 показано как двумерное, схематическое изображение 1102 может быть трехмерным представлением ряда зубов пользователя. В других вариантах реализации схематическое изображение 1100 может дополнительно содержать представление языка пользователя (не показано).
[00190] Обращаясь к фиг. 11B, первый знак 1131, второй знак 1132 и третий знак 1133 отображаются на устройстве 1006 отображения и накладываются на схематическое изображение 1100. Обычно знаки 1131, 1132, 1133 накладываются на схематическое изображение 1100, чтобы оказать содействие пользователю системы 1000 в чистке с помощью щетки связанной секции зубов пользователя. Как показано, первый знак 1131 наложен на вторую секцию из нескольких нижнечелюстных секций 1122. Наложение первого знака 1131, как показано, связывает первый знак 1131 со второй секцией из нескольких нижнечелюстных секций 1122. Второй знак 1132 накладывается на четвертую секцию из нескольких нижнечелюстных секций 1122, чтобы связать второй знак 1132 с четвертой секцией из нескольких нижнечелюстных секций 1122. Подобным образом, третий знак 1133 накладывается на вторую секцию из нескольких верхнечелюстных секций 1112, чтобы связать третий знак 1133 со второй секцией из нескольких верхнечелюстных секций 1112. Таким образом, различные знаки могут быть наложены на схематическое изображение 1100, чтобы связать каждый знак с желаемой частью ряда зубов на схематическом изображении 1100.
[00191] Положение каждого из знаков 1131, 1132, 1133 относительно схематического изображения 1100 может использоваться для дополнительного связывания каждого знака с конкретной поверхностью ряда зубов. Например, как показано, первый знак 1131 накладывается непосредственно поверх второй секции из нескольких нижнечелюстных секций 1122. Таким образом, первый знак 1131 связан с окклюзионной поверхностью 1124 второй секции из нескольких нижнечелюстных секций 1122. Второй знак 1132 накладывается на схематическое изображение 1110 так, что второй знак 1132, как правило, находится возле четвертой секции из нескольких нижнечелюстных секций 1122, но отдален от нее. Такое расположение второго знака 1132 связывает второй знак с внутренней поверхностью 1126 четвертой секции из нескольких нижнечелюстных секций 1122. Третий знак 1133 накладывается на схематическое изображение 1100 так, что он частично перекрывает вторую секцию из нескольких верхнечелюстных секций 1112, связывая третий знак 1133 как с окклюзионной поверхностью 1114, так и с внешней поверхностью 1118. Таким образом, расположение каждого знака может использоваться для связывания знака с различными секциями схематического изображения 1100 с увеличением степени детализации. Хотя это и не показано, знак также может быть связан с несколькими секциями путем наложения на схематическое изображение 1100 так, что он перекрывает несколько секций из верхнечелюстных или нижнечелюстных секций зубов.
[00192] Каждый из знаков 1131, 1132, 1133 может представлять собой неподвижное изображение, видеоизображение, анимированное изображение или тому подобное. Изображение (изображения), выбранное (выбранные) для каждого знака, обычно используется (используются) для оказания содействия пользователю системы 1000 в чистке с помощью щетки соответствующей секции зубов пользователя. С этой целью изображения могут иметь негативное значение, которое побуждает пользователя удалить изображение с устройства отображения. Например, знак может представлять собой изображение монстра, инопланетянина, хмурого лица, вымышленного злодея/персонажа, грозового облака или тому подобного или любую их комбинацию. Альтернативно изображение (изображения) может (могут) быть связано (связаны) с положительным значением, которое побуждает пользователя пытаться собрать или приобрести элемент/предмет на изображении. Например, знаки могут быть изображениями монет или денег, очков, звезд, животных, предметов коллекционирования или тому подобного или любой их комбинацией. Наконец, знаки могут в более общем виде представлять собой любое изображение, такое как форма (например, круг, квадрат, треугольник или любой другой многоугольник), галочка, другой символ или любая их комбинация.
[00193] Хотя схематическое изображение 1100 показано как содержащее три знака (знак 1131, 1132 и 1133), возможны любые количества знаков, такие как, например, один знак, два знака, пять знаков, десять знаков, шестнадцать знаков и т. д.
[00194] Обращаясь к фиг. 12, способ 1200 оказания содействия соблюдению схемы гигиены полости рта с использованием системы 1000 включает первый этап 1202, второй этап 1204, третий этап 1206, четвертый этап 1208 и пятый этап 1210.
[00195] Первый этап 1202 включает отображение схематического изображения 1100 на устройстве 1106 отображения (фиг. 11A). Первый этап 1202 может быть инициирован различными инициирующими событиями, такими как, например, инициирование сеанса осуществления чистки с помощью щетки пользователем. Пользователь может указать, что сеанс осуществления чистки с помощью щетки пользователем был инициирован путем предоставления входных данных (например, нажатием кнопки на устройстве 1006 отображения). Альтернативно первый этап 1202 может быть инициирован путем определения с помощью датчика 1004, что устройство 1002 для гигиены полости рта перемещается (например, пользователь поднял зубную щетку). Это перемещение указывает, что пользователь инициировал сеанс осуществления чистки с помощью щетки пользователем, и инициирует первый этап 1202 способа 1200.
[00196] Второй этап 1204 включает наложение знака на схематическое изображение 1100, отображаемое на устройстве 1006 отображения. Например, первый знак 1131 (фиг. 11B) может быть наложен на вторую секцию из нескольких нижнечелюстных секций 1122. Первый знак 1131 может быть наложен на схематическое изображение 1100 различными способами. Например, первый знак 1131 может внезапно появиться на схематическом изображении 1100, или знак 1131 может появиться медленно (например, знак 1131 первоначально выглядит полупрозрачным и становится менее прозрачным) в течение предопределенного периода времени (например, одной секунды, пяти секунд, десяти секунд и т. д.). В некоторых вариантах реализации первый знак 1131 может быть наложен во время второго этапа 1204 с использованием анимации. Например, первый знак 1131 может сначала появиться на крайней левой стороне устройства 1006 отображения и перемещаться в свое конечное положение на схематическом изображении 1100. Наложение первого знака 1131 во время второго этапа 1204 также может включать соответственный звук, который воспроизводится через динамик (не показан).
[00197] Как и первый этап 1202, второй этап 1204 может быть инициирован множеством инициирующих событий. Например, второй этап 1204 может быть инициирован после того, как система 1000 определила, что предопределенное количество времени истекло с момента инициирования сеанса осуществления чистки с помощью щетки пользователем (например, две секунды, десять секунд, тридцать секунд, одна минута и т. д.). Второй этап 1204 также может быть инициирован автоматически после инициирования сеанса осуществления чистки с помощью щетки пользователем, так что наложенный знак отображается одновременно с тем, когда схематическое изображение 1100 отображается на устройстве 1006 отображения во время первого этапа 1202. Альтернативно инициирующим событием для инициирования второго этапа 1204 может быть пользовательские входные данные, принятые устройством 1006 отображения.
[00198] Знак может быть наложен на любую часть схематического изображения 1100 во время второго этапа 1204 (например, первый знак 1131, второй знак 1132 или третий знак 1133). Кроме того, второй этап 1204 может включать наложение нескольких знаков (например, первого знака 1131 и третьего знака 1133). Секция схематического изображения 1100, выбранная для наложения знака на втором этапе 1204, может быть случайной или предопределенной. Например, человек (например, пользователь, родитель пользователя, стоматолог или любая другая третья сторона) может вводить через устройство 1006 отображения секцию (секции) схематического изображения 1100, где должен быть наложен знак. Например, если у пользователя есть полость или другие проблемы с зубами в определенной области рта пользователя, знак может быть наложен на соответствующую секцию схематического изображения 1100 во время второго этапа 1204, чтобы помочь исключить появление полостей в будущем или проблем с зубами в этой области.
[00199] Третий этап 1206 включает определение положения устройства 1002 для гигиены полости рта относительно рта/зубов пользователя. Обычно система 1000 определяет положение устройства 1002 для гигиены полости рта во рту пользователя с использованием датчика 1004, процессора 1008 и запоминающего устройства 1010. Любой из механизмов, описанных выше, может использоваться для определения положения устройства 1002 для гигиены полости рта на третьем этапе 1206 (например, видимый рисунок, оптический датчик, датчик движения, датчик приближения, датчик давления, датчик восприятия глубины, камера, гирометр, генератор магнитного поля и датчик магнитометра или любая их комбинация).
[00200] Во время третьего этапа 1206 положение устройства 1002 для гигиены полости рта связано с секцией ряда зубов пользователя. Эта секция ряда зубов пользователя затем связывается с секцией схематического изображения 1100 (фиг. 11A и 11B). Например, если определено, что головка устройства 1002 для гигиены полости рта находится на внешней поверхности передней левой четверти нижнечелюстных зубов пользователя (например, верхнего бокового переднего зуба), положение головки устройства 1002 для гигиены полости рта связывается с внешней поверхностью 1128 второй секции из нескольких нижнечелюстных секций 1122 на схематическом изображении 1100. Если устройство 1002 для гигиены полости рта находится, как правило, рядом со ртом пользователя или около него, но не находится непосредственно рядом с какими-либо зубами, это положение не связывается с секцией схематического изображения 1100.
[00201] Четвертый этап 1208 включает удаление знака с устройства 1006 отображения в ответ на определение, что головка устройства 1002 для гигиены полости рта находится непосредственно рядом с (например, в контакте с) секцией ряда зубов, которая соответствует секции схематического изображения 1100, содержащей знак в течение предопределенного количества времени. Например, как описано выше, первый знак 1131 накладывается на окклюзионную поверхность 1124 второй секции из нескольких нижнечелюстных участков 1122, и эта секция схематического изображения 1100 связывается с секцией ряда зубов пользователя. Если определено, что головка устройства 1002 для гигиены полости рта находится на связанной секции ряда зубов в течение предопределенного периода времени, первый знак 1131 удаляется с устройства 1006 отображения.
[00202] Предопределенное количество времени для удаления знака обычно выбирается для того, чтобы побудить пользователя чистить с помощью щетки связанную секцию ряда зубов в течение определенного периода времени в соответствии с надлежащими привычками чистки с помощью щетки, и в более общем смысле оно может представлять собой любой период времени (например, одну секунду, пять секунд, десять секунд, одну минуту, две минуты и т. д.). Таймер 1102 (фиг. 11A и 11B) может быть использован либо для того, чтобы показать пользователю, как долго он чистил с помощью щетки конкретную секцию ряда зубов, в качестве обратного отсчета, чтобы показать пользователю, сколько времени ему нужно чистить с помощью щетки связанную секцию ряда зубов для удаления знака, чтобы показать пользователю общее время, которое прошло за заданный сеанс осуществления чистки с помощью щетки пользователем, либо для любой комбинации из перечисленных действий.
[00203] Требование к пользователю чистить с помощью щетки связанную секцию ряда зубов в течение предопределенного периода времени, чтобы удалить знак, оказывает содействие соблюдению надлежащей схемы гигиены полости рта. Например, если предопределенный период времени составляет пять секунд, пользователь должен чистить с помощью щетки окклюзионную поверхность передней левой четверти зубов пользователя в течение пяти секунд для удаления первого знака 1131 с устройства 1106 отображения. В этом примере первый знак 1131 может представлять собой изображение монстра, который может стимулировать или побуждать пользователя чистить с помощью щетки связанную секцию своих зубов для удаления изображения монстра.
[00204] Удаление знака во время четвертого этапа 1208 может быть выполнено несколькими способами. Например, в ответ на условия для удаления, описанные выше, первый знак 1131 может быть немедленно удален с устройства 1006 отображения. Альтернативно прозрачность первого знака 1131 может быть увеличена в течение предопределенного количества времени, так что первый знак медленно исчезает с устройства 1006 отображения. В другом примере удаление первого знака 1131 включает анимацию (например, первый знак 1131 перемещается по устройству 1006 отображения и исчезает).
[00205] В некоторых вариантах реализации четвертый этап 1208 дополнительно включает наложение изображения для удаления на знак перед удалением знака с устройства 1006 отображения. Изображение для удаления обычно используется для того, чтобы подчеркнуть, что знак удаляется с устройства отображения. Например, изображение для удаления может представлять собой «Х», разряд молнии, облако, огонь/взрыв или любое другое изображение, передающее пользователю, что знак удаляется. В одном примере первый знак 1131 является изображением монстра, а изображение для удаления является изображением разряда молнии, которое позволяет пользователю воспринимать, что монстр был «уничтожен». В более общем смысле, изображение для удаления может представлять собой любое неподвижное изображение или видеоизображение.
[00206] Четвертый этап 1208 также может включать определение, что перемещение головки устройства 1002 для гигиены полости рта соответствует предопределенному типу прохода щетки (например, проходу щетки по кругу, проходу щетки назад и вперед или проходу щетки под углом, описанным в настоящем документе). В таких вариантах реализации знак удаляется после определения, что (1) положение головки устройства 1002 для гигиены полости рта соответствует секции схематического изображения 1100, связанной со знаком, в течение предопределенного количества времени, и (2) перемещение головки устройства 1002 для гигиены полости рта соответствует предопределенному проходу щетки в течение по меньшей мере части предопределенного количества времени. В более общем смысле, к четвертому этапу 1208 может быть добавлено любое другое инициирующее событие или условие перед обеспечением удаления знака с устройства 1006 отображения.
[00207] Второй этап 1204, третий этап 1206 и четвертый этап 1208 могут повторяться один или более раз для дополнительной помощи в оказании содействия соблюдению схемы гигиены полости рта. Например, после удаления первого знака 1131 (фиг. 11B) во время четвертого этапа 1208 второй этап 1204 повторяется, и второй знак 1132 (фиг. 11B) накладывается на схематическое изображение 1100. Затем третий этап 1206 повторяется, чтобы снова определить положение устройства 1002 для гигиены полости рта, и второй знак 1132 удаляется на четвертом этапе 1208, как только условия, описанные выше, выполнены. Таким образом, несколько знаков могут накладываться и удаляться во время данного сеанса осуществления чистки с помощью щетки для оказания содействия соблюдению схемы гигиены полости рта. Знаки могут быть наложены на схематическое изображение 1100 во время повторения этапов 1204, 1206 и 1208 в предопределенной последовательности или случайной последовательности. Например, первая предопределенная последовательность может предусматривать последовательное наложение знака/знаков на каждую секцию схематического изображения 1100, чтобы побудить пользователя чистить с помощью щетки все соответствующие секции зубов пользователя (например, знаки появляются слева направо по нескольким верхнечелюстным секциям 1112 на фиг. 11А, когда повторяются этапы 1204, 1206 и 1208). В другом примере вторая предопределенная последовательность может включать последовательное наложение знаков в соответствии с историей чистки с помощью щетки пользователя, которая может храниться в запоминающем устройстве 1010 (например, наложение знака на секцию схематического изображения 1100, которую пользователь чаще всего пропускает во время осуществления чистки с помощью щетки, или секцию, в которой у пользователя была полость).
[00208] В некоторых вариантах реализации четвертый этап 1208 не полностью удаляет знак с устройства 1006 отображения, а вместо этого перемещает знак из первого местоположения на схематическом изображении 1100 во второе положение на схематическом изображении 1100. Например, вместо удаления первого знака 1131 из схематического изображения 1100 после того, как все условия выполнены, первый знак 1131 может быть перемещен во второе положение на схематическом изображении (например, положение второго знака 1132, показанное на фиг. 11B).
[00209] Пятый этап 1210 включает захват изображения пользователя с использованием камеры. Как описано выше, устройство 1006 отображения может содержать камеру, датчик 1004 может содержать камеру, или камера может быть отдельным компонентом. Изображение пользователя может содержать изображение дополненной реальности, которое накладывается на по меньшей мере часть изображения пользователя. Например, изображение дополненной реальности может представлять собой шляпу, уши, глаза, нос, одежду, блестки или другие объекты или графические символы, которые накладываются на изображение пользователя. Кроме того, изображение может содержать связанное настраиваемое сообщение, которое пользователь может вводить с использованием пользовательского средства ввода устройства 1006 отображения (например, сенсорной клавиатуры).
[00210] Шестой этап 1212 включает передачу уведомления третьей стороне (например, родителям или стоматологу пользователя) посредством модуля 1012 связи. Уведомление может содержать изображение пользователя и/или изображение дополненной реальности, снятое во время пятого этапа 1210. Уведомление также может содержать информацию, касающуюся сеанса осуществления чистки с помощью щетки пользователем (например, сколько времени пользователь чистил с помощью щетки зубы, успешно ли пользователь удалил все знаки и т. д.). Уведомление также помогает оказать содействие соблюдению правил гигиены полости рта, позволяя третьей стороне отслеживать привычки пользователя чистить с помощью щетки зубы. Уведомление также может быть отправлено на учетную запись пользователя в социальной сети (например, Facebook, Twitter и т. д.) для совместного использования с третьими лицами. В то время как шестой этап 1212 показан как следующий за пятым этапом 1210, шестой этап 1212 также может непосредственно следовать за завершением четвертого этапа 1208 (то есть уведомление передается без захвата изображения пользователя).
[00211] Седьмой этап 1214 включает отображение выбираемого элемента на устройстве 1006 отображения. Обращаясь к фиг. 13A, несколько выбираемых элементов 1300 отображаются на устройстве 1006 отображения. Несколько выбираемых элементов 1300 обычно используются в качестве пользовательского интерфейса, чтобы позволить пользователю управлять или инициировать различные аспекты связанного приложения. Например, выбор одного из нескольких выбираемых элементов 1300 может привести к тому, что описанная выше камера сделает фотографию пользователя (например, инициирует пятый этап 1210).
[00212] Хотя несколько выбираемых элементов 1300 показаны как содержащие два выбираемых элемента, любое количество выбираемых элементов может отображаться на устройстве 1006 отображения (например, один выбираемый элемент, пять выбираемых элементов, пятнадцать выбираемых элементов и т. д.). Хотя несколько выбираемых элементов 1300 показаны прямоугольными на фиг. 13А для иллюстративных целей, они обычно могут представлять собой текст, изображения, символы или их комбинации.
[00213] В некоторых вариантах реализации количество нескольких выбираемых элементов 1300 может соответствовать количеству знаков, которые удаляются с устройства 1006 отображения, когда этапы 1202—1208 повторяются во время сеанса осуществления чистки с помощью щетки. Например, если пользователь удаляет два знака с устройства 1006 отображения во время сеанса осуществления чистки с помощью щетки, несколько выбираемых элементов 1300 содержат два выбираемых элемента, которые пользователь может выбирать. Подобным образом, количество нескольких выбираемых элементов 1300 может увеличиваться, когда пользователь успешно удаляет знаки в течение нескольких сеансов осуществления чистки с помощью щетки. Например, данный выбираемый элемент появится (или будет «разблокирован») только после того, как пользователь удалит все знаки во время предопределенного количества последовательных сеансов осуществления чистки с помощью щетки (например, двух сеансов, четырех сеансов, десяти сеансов и т. д.). Таким образом, количество из нескольких выбираемых элементов 1300 может использоваться в качестве системы вознаграждений, чтобы стимулировать или побуждать пользователя соблюдать надлежащую схему гигиены полости рта.
[00214] Как показано на фиг. 13A, несколько выбираемых элементов 1300 отображаются на устройстве 1006 отображения в системе 1302 координат. Каждый из нескольких выбираемых элементов 1300 связан с положением в системе 1302 координат. Как показано, первый из нескольких выбираемых элементов 1300 характеризуется положением 1304 в системе 1302 координат.
[00215] Восьмой этап 1216 (фиг. 12) включает прием варианта выбора выбираемого элемента, отображаемого на устройстве 1006 отображения. Пользователь выбирает один или более из нескольких выбираемых элементов 1300 путем перемещения устройства 1002 для гигиены полости рта относительно устройства 1006 отображения в положение, которое соответствует положению выбираемого элемента в системе 1302 координат.
[00216] Обращаясь к фиг. 13B, устройство 1002 для гигиены полости рта расположено в трехмерном объемном пространстве 1320, которое обычно находится перед устройством 1006 отображения и/или датчиком 1004. Как описано выше, датчик 1004 и устройство 1006 отображения могут быть включены в корпус (например, смартфон). Предпочтительно датчик 1004 представляет собой камеру, которая включена в устройство 1006 отображения как часть смартфона, так что трехмерное объемное пространство 1320 обычно находится перед устройством 1006 отображения и датчиком 1004. В таких вариантах реализации трехмерное объемное пространство 1320 соответствует полю обзора датчика 1004.
[00217] Как показано, трехмерное объемное пространство 1320 включает систему 1322 координат. Система 1322 координат позволяет системе 1000 определять с использованием датчика 1004, процессора 1008 и запоминающего устройства 1010 положение головки 1002a устройства 1002 для гигиены полости рта в трехмерном объемном пространстве 1320. Система 1322 координат трехмерного объемного пространства 1320 соответствует системе 1302 координат устройства 1006 отображения, что означает, что заданное положение в системе 1302 координат (фиг. 13A) имеет связанное положение в системе 1322 координат (фиг. 13B).
[00218] Чтобы выбрать один из нескольких выбираемых элементов 1300 (фиг. 13A), пользователь перемещает устройство 1002 для гигиены полости рта в трехмерном объемном пространстве 1320, пока положение головки 1002a не станет положением в системе координат 1322 (фиг. 13B), которое соответствует положению выбираемого элемента в системе 1302 координат (фиг. 13A). Кроме того, вместо того, чтобы требовать, чтобы положение головки 1002a в системе 1322 координат точно соответствовало положению выбираемого элемента в системе 1302 координат, вариант выбора может быть принят путем определения, что положение головки 1002a в системе 1322 координат находится на предопределенном расстоянии от положения в системе 1322 координат, которое соответствует положению выбираемого элемента в системе 1302 координат (фиг. 13A). Другими словами, головка 1002a не должна характеризоваться точным положением для выбора выбираемого элемента. Предопределенное расстояние может составлять, например, четверть дюйма, один дюйм, два дюйма, четыре дюйма, шесть дюймов или любое другое подходящее расстояние. После того, как пользователь перемещает головку 1002a устройства 1002 для гигиены полости рта в связанное положение, система 1000 принимает вариант выбора этого выбираемого элемента, который запускает соответствующую функцию (например, обеспечивает, чтобы камера сделала фотографию пользователя для обеспечения наложения изображения дополненной реальности на изображение пользователя и т. д.).
[00219] Хотя система 1000 и связанный с ней способ 2000 были показаны и описаны в настоящем документе как отображающие схематическое изображение 1100, таймер 1102 и/или несколько выбираемых элементов 1300, явно предусматривается, что на устройстве 1006 отображения могут отображаться другие изображения. Например, в некоторых вариантах реализации на устройстве 1002 отображения может отображаться представление устройства 1002 для гигиены полости рта. Представление устройства для гигиены полости рта может быть анимировано так, что его перемещение по существу аналогично перемещению устройства 1002 для гигиены полости рта (например, если пользователь перемещает устройство 1002 для гигиены полости рта из стороны в сторону, представление также перемещается из стороны в сторону). Кроме того, представление устройства для гигиены полости рта может представлять собой изображение устройства для гигиены полости рта (например, изображение обычной зубной щетки или изображение фактического устройства 1002 для гигиены полости рта) или, в более общем случае, любое другое изображение. Например, представлением устройства для гигиены полости рта может быть меч, бейсбольная бита, хоккейная клюшка или любой другой предмет. Таким образом, пользователь может перемещать устройство 1002 для гигиены полости рта для обеспечения соответствующего перемещения представления устройства для гигиены полости рта на устройстве 1006 отображения.
Компьютерная и аппаратная реализация изобретения
[00220] Следует сначала понимать, что настоящее изобретение в данном документе может быть реализовано с помощью аппаратного обеспечения и/или программного обеспечения любого типа и может представлять собой предварительно запрограммированное вычислительное устройство общего назначения. Например, система может быть реализована с использованием сервера, персонального компьютера, портативного компьютера, тонкого клиента или любого подходящего устройства или устройств. Настоящее изобретение и/или его компоненты могут представлять собой одно устройство в одном местоположении или несколько устройств в одном или нескольких местоположениях, которые соединены вместе с помощью любых подходящих протоколов связи по любому средству связи, такому как электрический кабель, оптоволоконный кабель, или беспроводным образом.
[00221] Следует также отметить, что настоящее изобретение проиллюстрировано и описано в настоящем документе как имеющее несколько модулей, которые выполняют конкретные функции. Следует понимать, что эти модули лишь схематически проиллюстрированы на основе их функции исключительно для наглядности и необязательно представляют конкретное аппаратное обеспечение или программное обеспечение. В связи с этим, эти модули могут представлять собой аппаратное обеспечение и/или программное обеспечение, реализуемое для существенного выполнения конкретных описанных функций. Более того, модули могут быть объединены вместе в рамках настоящего изобретения или разделены на дополнительные модули на основе конкретной желаемой функции. Таким образом, описание не следует толковать как ограничивающее настоящее изобретение, а лишь следует понимать, что в нем иллюстрируется его один иллюстративный вариант реализации.
[00222] Вычислительная система может содержать клиенты и серверы. Клиент и сервер обычно удалены друг от друга и, как правило, взаимодействуют по сети связи. Отношение клиента и сервера возникает за счет компьютерных программ, работающих на соответствующих компьютерах и имеющих между собой отношение клиент-сервер. В некоторых вариантах реализации сервер передает данные (например, HTML-страницу) на устройство-клиент (например, в целях отображения данных пользователю и приема вводимых данных от пользователя, взаимодействующего с устройством-клиентом). Данные, сгенерированные на устройстве-клиенте (например, результат взаимодействия пользователя), могут быть приняты с устройства-клиента на сервере.
[00223] Варианты реализации настоящего изобретения, описанные в настоящем описании, могут быть реализованы в вычислительной системе, которая содержит внутренний компонент, например, в качестве сервера данных, или которая содержит компонент промежуточного программного обеспечения, например, сервер приложений, или которая содержит внешний компонент, например, клиентский компьютер с графическим интерфейсом пользователя или веб-браузером, через который пользователь может взаимодействовать с вариантом реализации настоящего изобретения, описанного в настоящем описании, или любую комбинацию из одного или более таких внутренних компонентов, компонентов промежуточного программного обеспечения или внешних компонентов. Компоненты системы могут быть взаимосвязаны по какой-либо форме или среде цифровой передачи данных, например, сетью связи. Примеры сетей связи включают локальную вычислительную сеть («LAN») и глобальную вычислительную сеть («WAN»), международную компьютерную сеть (например, Интернет) и одноранговые сети (например, индивидуализированные одноранговые сети).
[00224] Варианты реализации настоящего изобретения и операции, описанные в настоящем описании, могут быть реализованы в цифровой электронной схеме или в компьютерном программном обеспечении, программно-аппаратном обеспечении или аппаратном обеспечении, включая структуры, раскрытые в настоящем описании и их структурные эквиваленты, или в комбинациях одного или более из них. Варианты реализации настоящего изобретения, описанные в настоящем описании, могут быть реализованы в виде одной или более компьютерных программ, т. е. одного или более модулей команд компьютерных программ, закодированных на компьютерном носителе данных для исполнения прибором обработки данных или для управления его работой. Альтернативно или дополнительно команды программы могут быть закодированы в искусственно генерируемом распространяемом сигнале, например, в генерируемом машиной электрическом, оптическом или электромагнитном сигнале, который генерируется для кодирования информации для передачи на подходящий прибор в виде приемника для исполнения прибором обработки данных. Компьютерный носитель данных может представлять собой машиночитаемое устройство хранения, машиночитаемый запоминающий носитель, массив или устройство памяти со случайным или постоянным доступом или комбинацию из одного или более из них или может быть включен в них. Кроме того, хотя компьютерный носитель данных не является распространяемым сигналом, компьютерный носитель данных может быть источником или местом назначения команд компьютерной программы, закодированных в искусственно сгенерированном распространенном сигнале. Компьютерный носитель данных может также представлять собой один или более отдельных физических компонентов или носителей (например, несколько компакт-дисков, дисков или других устройств хранения) или быть включен в них.
[00225] Операции, описанные в настоящем описании, могут быть реализованы в качестве операций, выполняемых «прибором обработки данных» в отношении данных, хранящихся на одном или более машиночитаемых устройствах хранения или принятых с других источников.
[00226] Термин «прибор обработки данных» охватывает все типы приборов, устройств и машин для обработки данных, включая в качестве примера программируемый процессор, компьютер, систему на микросхеме, или несколько из перечисленного, или их комбинации. Прибор может содержать логическую схему специального назначения, например, FPGA (программируемую вентильную матрицу) или ASIC (специализированную интегральную схему). Прибор может также содержать, в дополнение к аппаратному обеспечению, код, который создает среду выполнения для рассматриваемой компьютерной программы, например код, который является составной частью программно-аппаратного обеспечения процессора, набора протоколов, системы управления базами данных, операционной системы, межплатформенной среды выполнения, виртуальной машины или комбинации одного или более из них. Прибор и среда выполнения могут реализовывать различные инфраструктуры разных вычислительных моделей, такие как веб-службы, инфраструктуры распределенных вычислений и инфраструктуры grid-вычислений.
[00227] Компьютерная программа (также известная как программа, программное обеспечение, программное приложение, скрипт или код) может быть написана на любом языке программирования, включая компилируемый или интерпретируемый языки, декларативные или процедурные языки, и она может быть развернута в любой форме, в том числе в виде отдельной программы или в виде модуля, компонента, подпрограммы, объекта или другой единицы, подходящей для использования в вычислительной среде. Компьютерная программа может, но не обязательно, соответствовать файлу в файловой системе. Программа может храниться в части файла, который содержится в других программах или данных (например, одном или более скриптах, хранящихся в документе с определенным языком разметки), в одном файле, назначенном рассматриваемой программе или в нескольких координированных файлах (например, файлах, которые хранят один или более модулей, подпрограмм или части кода). Компьютерная программа может быть использована так, чтобы быть исполненной на одном компьютере или на нескольких компьютерах, которые размещены в одном месте или распределены по нескольким местам и взаимосвязаны посредством сети связи.
[00228] Процессы и логические потоки, описанные в настоящем описании, могут быть выполнены одним или более программируемыми процессорами, исполняющими одну или более компьютерных программ для выполнения действий путем работы над входящими данными и генерирования результата. Процессы и логические потоки могут также быть выполнены посредством, и прибор может также быть реализован в качестве, логической схемы специального назначения, например, FPGA (программируемой вентильной матрицы) или ASIC (специализированной интегральной схемы).
[00229] Процессы, подходящие для исполнения компьютерной программы, содержат, в качестве примера, микропроцессоры как обычного, так и специального назначения и любой один или более процессоров любого типа цифрового компьютера. Обычно процессор принимает команды и данные из постоянной памяти или оперативной памяти или из обоих из них. Ключевыми элементами компьютера являются процессор для выполнения действий в соответствии с командами и одно или более запоминающих устройств для сохранения команд и данных. Для приема данных от или передачи данных на, или и того, и другого, компьютер обычно также содержит одно или более устройств массовой памяти для хранения данных, например, магнитные, магнитооптические диски или оптические диски, или функционально соединен с ними. Однако компьютер не обязательно должен содержать такие устройства. Более того, компьютер может быть встроен в другое устройство, например, мобильный телефон, персональный цифровой ассистент (PDA), мобильный аудио- или видеоплеер, игровую приставку, приемник системы глобального позиционирования (GPS) или портативное устройство хранения (например, флеш-накопитель универсальной последовательной шины (USB)) и тому подобное. Устройства, подходящие для хранения команд компьютерных программ и данных включают все формы энергонезависимой памяти, устройств мультимедиа и запоминающих устройств, включая в качестве примера полупроводниковые запоминающие устройства, например, EPROM, EEPROM и запоминающие флеш-устройства; магнитные диски, например, внутренние жесткие диски или съемные диски; магнитооптические диски; и CD- и DVD-диски. Процессор и память могут быть добавлены или включены в логическую схему специального назначения.
[00230] Специалистам в данной области техники будет понятно, что в описанные варианты осуществления могут быть внесены многие изменения без отклонения от сущности и объема настоящего изобретения. Кроме того, специалисты в данной области техники также поймут, что определенные варианты осуществления, описанные для одного устройства или системы, могут быть легко или с небольшой модификацией включены в варианты осуществления, описанные для другого устройства или системы, без отклонения от сущности и объема настоящего изобретения.
[00231] В качестве примера, следующие выбранные варианты осуществления являются иллюстративными примерами настоящего изобретения.
ВЫБРАННЫЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ
[00232] Хотя вышеприведенное описание и приложенная формула изобретения раскрывают ряд вариантов осуществления, в следующих дополнительных вариантах осуществления раскрыты другие альтернативные аспекты настоящего изобретения.
[00233] Вариант осуществления 1. Способ оказания содействия соблюдению схемы гигиены полости рта, при это способ включает: отображение на устройстве отображения представления по меньшей мере части ряда зубов пользователя; наложение знака на представление так, что знак связан с первой секцией представления; и в ответ на определение посредством по меньшей мере одного из одного или более процессоров, что головка устройства для гигиены полости рта расположена непосредственно возле первой секции ряда зубов, которая соответствует первой секции представления, в течение по меньшей мере предопределенного количества времени, обеспечение удаления знака с устройства отображения.
[00234] Вариант осуществления 2. Способ согласно варианту осуществления 1, дополнительно включающий, в ответ на удаление знака, передачу уведомления третьей стороне посредством модуля связи.
[00235] Вариант осуществления 3. Способ согласно любому из вариантов осуществления 1 и 2, дополнительно включающий захват изображения пользователя с использованием камеры и отображение изображения пользователя на устройстве отображения.
[00236] Вариант осуществления 4. Способ согласно любому из вариантов осуществления 1—3, дополнительно включающий отображение выбираемого элемента на устройстве отображения, при этом выбираемый элемент находится в первом местоположении в системе координат, при этом первое местоположение в системе координат связано с местоположением в объемном пространстве обычно перед устройством отображения; и, в ответ на определение посредством по меньшей мере одного из одного или более процессоров, что головка устройства для гигиены полости рта находится в пределах предопределенного расстояния от местоположения в объемном пространстве, связанного с первым местоположением в системе координат, в течение предопределенного количества времени, прием варианта выбора выбираемого элемента.
[00237] Вариант осуществления 5. Способ согласно варианту осуществления 4, дополнительно включающий захват изображения пользователя с использованием камеры и отображение изображения пользователя на устройстве отображения, а также после приема варианта выбора выбираемого элемента передачу изображения пользователя третьей стороне посредством модуля связи.
[00238] Вариант осуществления 6. Способ согласно варианту осуществления 4, дополнительно включающий захват изображения пользователя с использованием камеры и отображение изображения пользователя на устройстве отображения, а также после приема варианта выбора выбираемого элемента наложение графического символа, связанного с выбираемым элементом, на изображение пользователя на устройстве отображения.
[00239] Вариант осуществления 7. Способ согласно любому из вариантов осуществления 1—6, дополнительно включающий передачу изображения пользователя и наложенного графического символа третьей стороне посредством модуля связи.
[00240] Вариант осуществления 8. Способ согласно любому из вариантов осуществления 1—7, в котором определение дополнительно включает определение, что перемещение головки устройства для гигиены полости рта соответствует предопределенному типу прохода щетки.
[00241] Вариант осуществления 9. Способ согласно варианту осуществления 8, в котором предопределенный тип прохода щетки представляет собой проход щетки по кругу, проход щетки назад и вперед, проход щетки под углом или любую их комбинацию.
[00242] Вариант осуществления 10. Способ согласно любому из вариантов осуществления 1—9, в котором представление первой секции зубов соответствует полному ряду верхнечелюстных зубов или полному ряду нижнечелюстных зубов.
[00243] Вариант осуществления 11. Способ согласно любому из вариантов осуществления 1—10, в котором первая секция представления соответствует одной из нескольких секций полного ряда верхнечелюстных зубов или одной из нескольких секций полного ряда нижнечелюстных зубов.
[00244] Вариант осуществления 12. Способ согласно любому из вариантов осуществления 1—11, в котором первая секция ряда зубов имеет внутреннюю поверхность, внешнюю поверхность и окклюзионную поверхность, при этом определение дополнительно включает определение, что головка устройства для гигиены полости рта расположена непосредственно возле одной из внутренней поверхности, внешней поверхности или окклюзионной поверхности ряда зубов.
[00245] Вариант осуществления 13. Система для гигиены полости рта, при этом система содержит: устройство для гигиены полости рта, содержащее рукоятку и головку; датчик; устройство отображения; один или более процессоров; и запоминающее устройство, хранящее команды, которые при исполнении по меньшей мере одним из одного или более процессоров обеспечивают отображение системой для гигиены полости рта на устройстве отображения представления по меньшей мере части ряда зубов пользователя; наложение знака на представление так, что знак связан с первой секцией представления; в ответ на определение посредством по меньшей мере одного из одного или более процессоров, что головка устройства для гигиены полости рта расположена непосредственно возле первой секции ряда зубов, которая соответствует первой секции представления, в течение по меньшей мере предопределенного количества времени, удаление знака с дисплея.
[00246] Вариант осуществления 14. Система согласно варианту осуществления 13, дополнительно содержащая модуль связи, который выполнен с возможностью передачи уведомления третьей стороне в ответ на удаление знака с устройства отображения.
[00247] Вариант осуществления 15. Система согласно любому из вариантов осуществления 13 и 14, дополнительно содержащая камеру, выполненную с возможностью захвата изображения пользователя, при этом команды при исполнении по меньшей мере одним из одного или более процессоров обеспечивают отображение устройством отображения изображения пользователя.
[00248] Вариант осуществления 16. Система согласно варианту осуществления 15, дополнительно содержащая модуль связи, который выполнен с возможностью передачи изображения пользователя третьей стороне.
[00249] Вариант осуществления 17. Система согласно любому из вариантов осуществления 13—16, в которой команды при исполнении по меньшей мере одним из одного или более процессоров обеспечивает отображение системой для гигиены полости рта выбираемого элемента на устройстве отображения, при этом выбираемый элемент находится в первом местоположении в системе координат, при этом первое местоположение в системе координат связано с местоположением в объемном пространстве обычно перед устройством отображения; и, в ответ на определение посредством датчика, что головка устройства для гигиены полости рта находится в пределах предопределенного расстояния от местоположения в объемном пространстве, связанного с первым местоположением в системе координат, в течение предопределенного количества времени, прием варианта выбора выбираемого элемента.
[00250] Вариант осуществления 18. Система согласно варианту осуществления 17, в которой команды при исполнении по меньшей мере одним из одного или более процессоров обеспечивают наложение системой для гигиены полости рта графического символа, связанного с выбираемым элементом, на изображение пользователя на устройстве отображения в ответ на прием варианта выбора выбираемого элемента.
[00251] Вариант осуществления 19. Система согласно варианту осуществления 18, дополнительно содержащая модуль связи, который выполнен с возможностью передачи изображения пользователя и наложенного графического символа третьей стороне.
[00252] Вариант осуществления 20. Система согласно любому из вариантов осуществления 13—19, в которой определение дополнительно включает определение, что перемещение головки устройства для гигиены полости рта соответствует предопределенному типу прохода щетки.
[00253] Вариант осуществления 21. Система согласно варианту осуществления 20, в которой предопределенный тип прохода щетки представляет собой проход щетки по кругу, проход щетки назад и вперед, проход щетки под углом или любую их комбинацию.
[00254] Вариант осуществления 22. Система согласно любому из вариантов осуществления 13—21, в которой первая секция представления соответствует полному ряду верхнечелюстных зубов или полному ряду нижнечелюстных зубов.
[00255] Вариант осуществления 23. Система согласно любому из вариантов осуществления 13—22, в которой первая секция представления соответствует одной из нескольких секций полного ряда верхнечелюстных зубов или одной из нескольких секций полного ряда нижнечелюстных зубов.
[00256] Вариант осуществления 24. Система согласно любому из вариантов осуществления 13—23, в которой датчик представляет собой оптический датчик, датчик движения, гирометр, магнитометр, акселерометр, камеру или любую их комбинацию.
ВЫВОД
[00257] Различные способы и технологии, описанные выше, обеспечивают ряд способов осуществления изобретения. Конечно, следует понимать, что не обязательно все описанные цели или преимущества могут быть достигнуты в соответствии с любым конкретным вариантом осуществления, описанным в настоящем документе. Таким образом, например, специалисты в данной области техники поймут, что способы могут быть выполнены так, что достигается или оптимизируется одно преимущество или группа преимуществ, как описано в настоящем документе, без необходимости достижения других целей или преимуществ, как указано или предложено в настоящем документе. В настоящем документе упоминаются различные альтернативы. Следует понимать, что некоторые варианты осуществления конкретно включают один, другой или несколько признаков, в то время как другие конкретно исключают один, другой или несколько признаков, при этом другие, в свою очередь, ограничивают конкретный признак путем включения одного, другого или нескольких преимущественных признаков.
[00258] Кроме того, специалист в данной области техники поймет применимость различных признаков из разных вариантов осуществления. Подобным образом, различные элементы, признаки и этапы, обсуждаемые выше, а также другие известные эквиваленты для каждого такого элемента, признака или этапа, могут быть использованы в различных комбинациях специалистом в данной области техники для выполнения способов согласно принципам, описанным в настоящем документе. В различных вариантах осуществления среди различных элементов признаков и этапов некоторые будут специально включены, а другие специально исключены.
[00259] Хотя заявка была раскрыта в контексте определенных вариантов осуществления и примеров, специалистам в данной области техники должно быть понятно, что варианты осуществления изобретения распространяются за пределы конкретно раскрытых вариантов осуществления на другие альтернативные варианты осуществления и/или их использования, модификации и эквиваленты.
[00260] В некоторых вариантах осуществления термины в форме единственного числа и с аналогичными ссылками, используемые в контексте описания конкретного варианта осуществления изобретения (особенно в контексте некоторых из следующих пунктов формулы изобретения), могут быть истолкованы как охватывающие формы и единственного, и множественного чисел. Изложение диапазонов значений в настоящем документе просто предназначено для того, чтобы служить кратким способом индивидуальной ссылки на каждое отдельное значение, попадающее в диапазон. Если в настоящем документе не указано иное, каждое отдельное значение включается в описание, как если бы оно было отдельно изложено в настоящем документе. Все способы, описанные в настоящем документе, могут быть выполнены в любом подходящем порядке, если иное не указано в настоящем документе или иное явно не противоречит контексту. Использование любого и всех примеров или иллюстративного языка (например, «такой как»), предусмотренное в отношении определенных вариантов осуществления в настоящем документе, предназначено просто для лучшего разъяснения изобретения и не накладывает ограничения на объем изобретения, если иное не указано в формуле изобретения. Ни один язык в описании не должен быть истолкован как указывающий на любой незаявленный элемент, существенный для осуществления изобретения на практике.
[00261] В настоящем документе описаны определенные варианты осуществления данного изобретения. Вариации этих вариантов осуществления станут очевидными для специалистов в данной области техники после прочтения приведенного выше описания. Предполагается, что квалифицированные специалисты могут использовать такие вариации должным образом, и изобретение может быть осуществлено на практике способом, отличным от того, который конкретно описан в настоящем документе. Соответственно многие варианты осуществления данного изобретения включают все модификации и эквиваленты объекта, изложенного в прилагаемой формуле изобретения, как предусмотрено законом. Кроме того, любая комбинация вышеописанных элементов во всех возможных их вариациях входит в объем изобретения, если в настоящем документе не указано иное или иное явно не противоречит контексту.
[00262] Были описаны конкретные варианты реализации объекта изобретения. Другие варианты реализации находятся в пределах объема следующей формулы изобретения. В некоторых случаях действия, изложенные в формуле изобретения, могут выполняться в другом порядке и при этом достигать желаемых результатов. Кроме того, процессы, изображенные на прилагаемых фигурах, не обязательно требуют конкретного показанного порядка или последовательного порядка для достижения желаемых результатов.
[00263] Все патенты, патентные заявки, публикации патентных заявок и другой материал, такой как статьи, книги, технические описания, публикации, документы, предметы и/или тому подобное, на которые даны ссылки в настоящем документе, включены в настоящий документ посредством этой ссылки во всей своей полноте для всех целей, за исключением любых материалов делопроизводства по заявке на патент для рассмотрения, связанных с ним, любого из того, что не соответствует или противоречит настоящему документу, или любого из того, что может иметь ограничивающий эффект в отношении самого широкого объема формулы изобретения, которые в настоящее время или позднее связаны с настоящим документом. Например, если есть какое-либо несоответствие или противоречие между описанием, определением и/или использованием термина, связанного с любым включенным материалом, и термина, связанного с настоящим документом, описание, определение и/или использование термина в настоящем документе являются преимущественными.
[00264] В заключение следует понимать, что варианты осуществления изобретения, раскрытые в настоящем документе, иллюстрируют принципы вариантов осуществления изобретения. Другие модификации, которые могут быть использованы, могут входить в объем изобретения. Таким образом, в качестве примера, но не ограничения, альтернативные конфигурации вариантов осуществления изобретения могут применяться в соответствии с изложенными настоящем документе идеями. Соответственно варианты осуществления настоящей заявки не ограничиваются конкретно тем, что показано и описано.
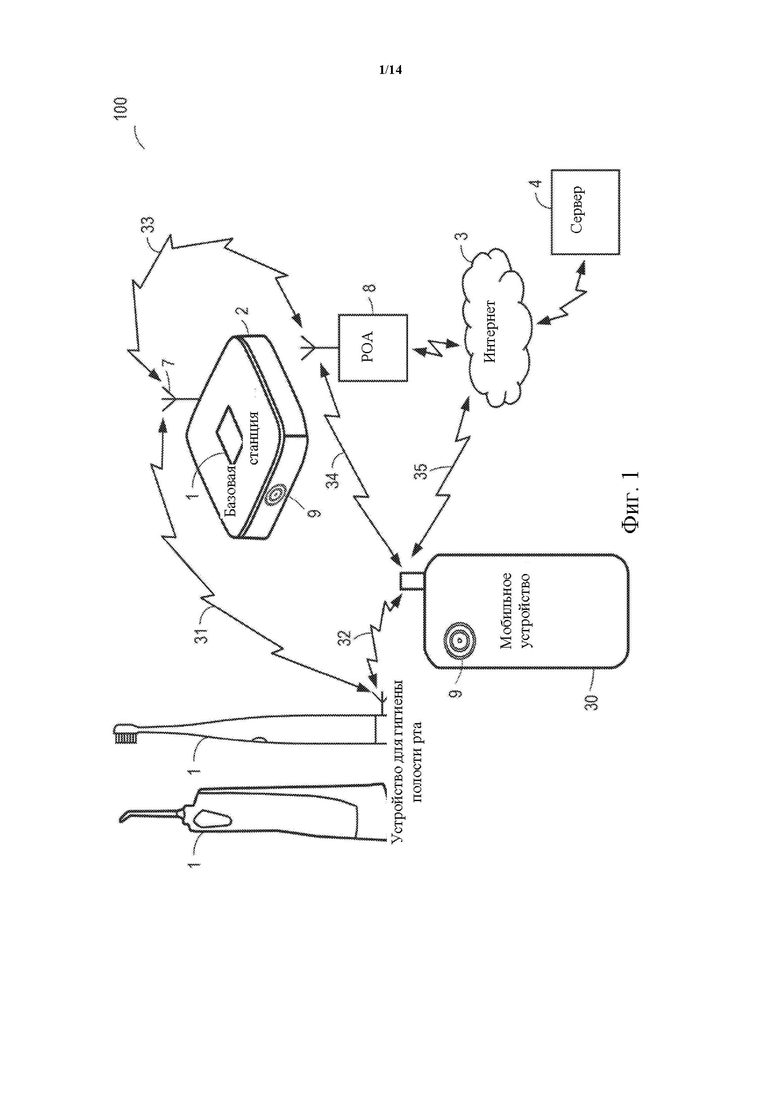
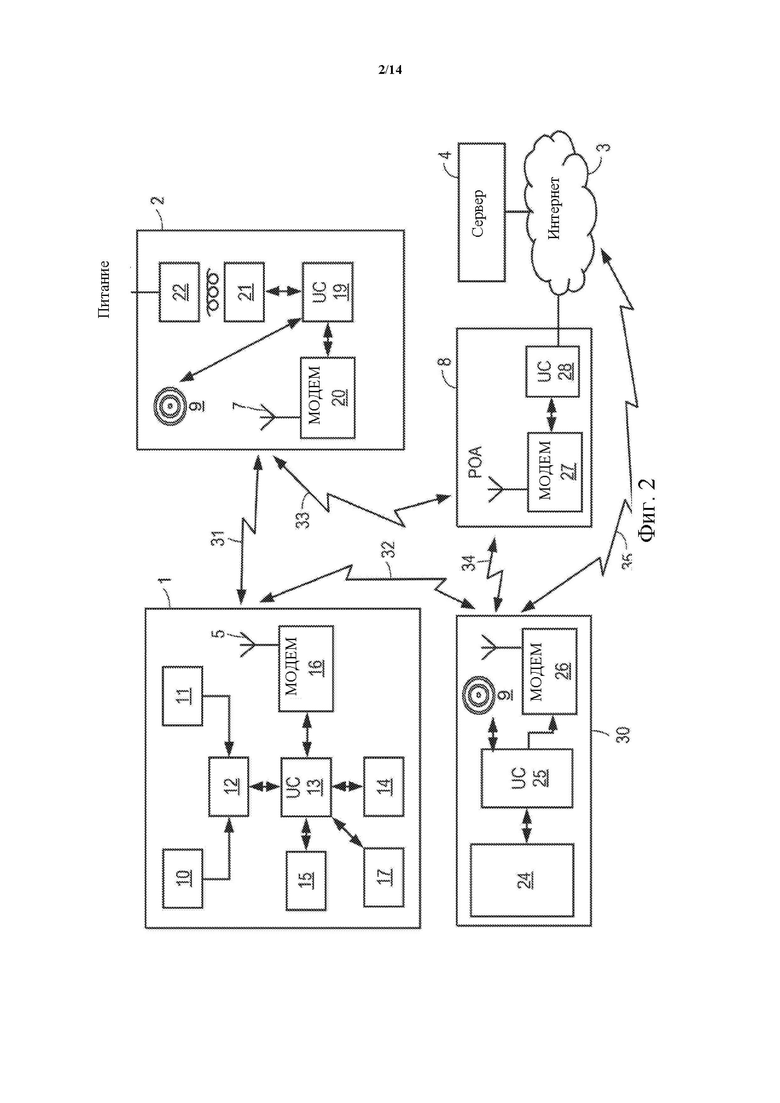
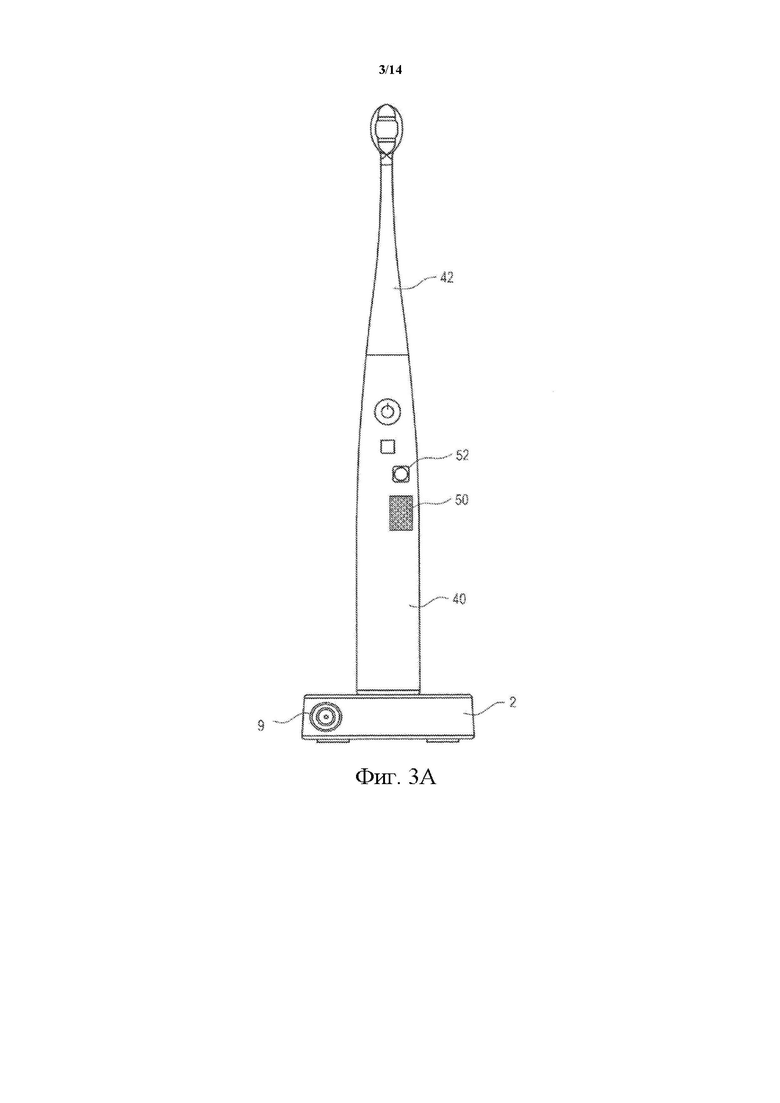
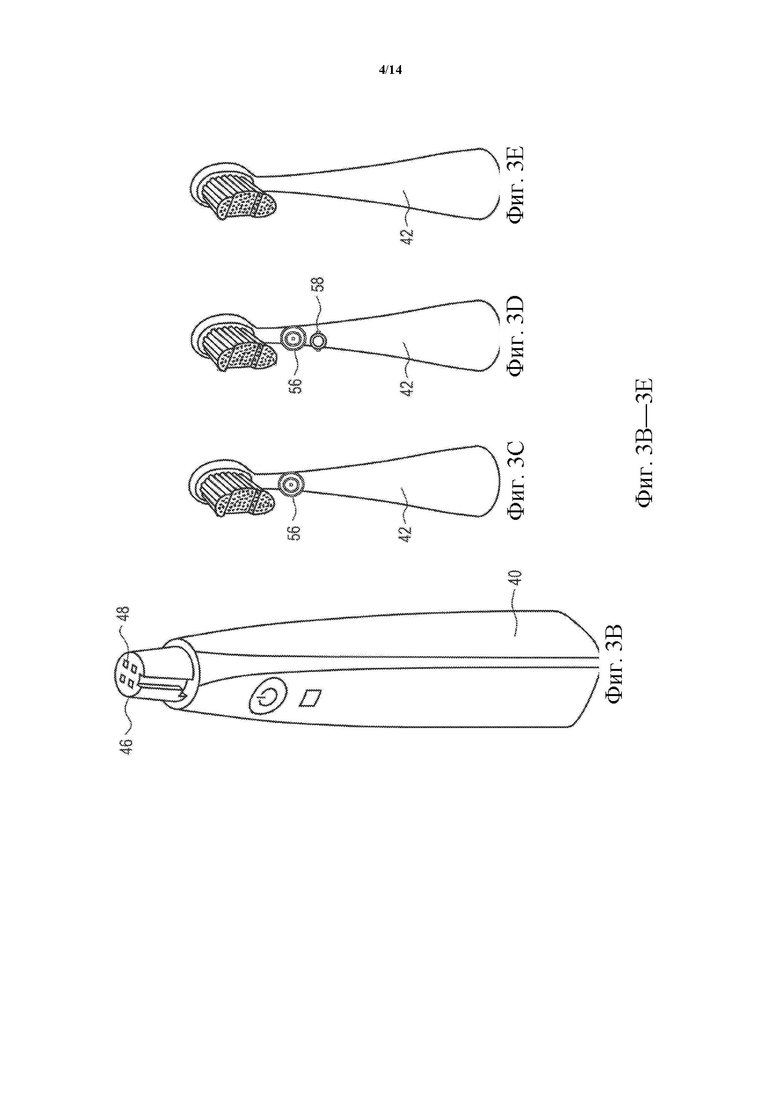
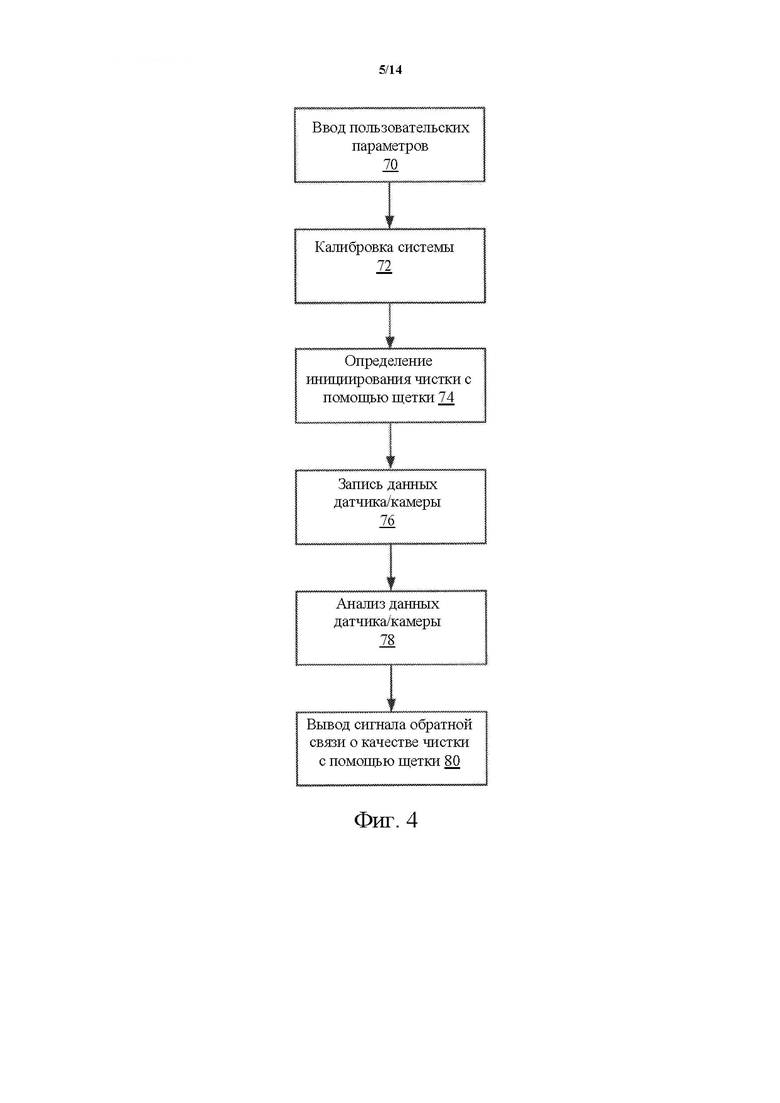
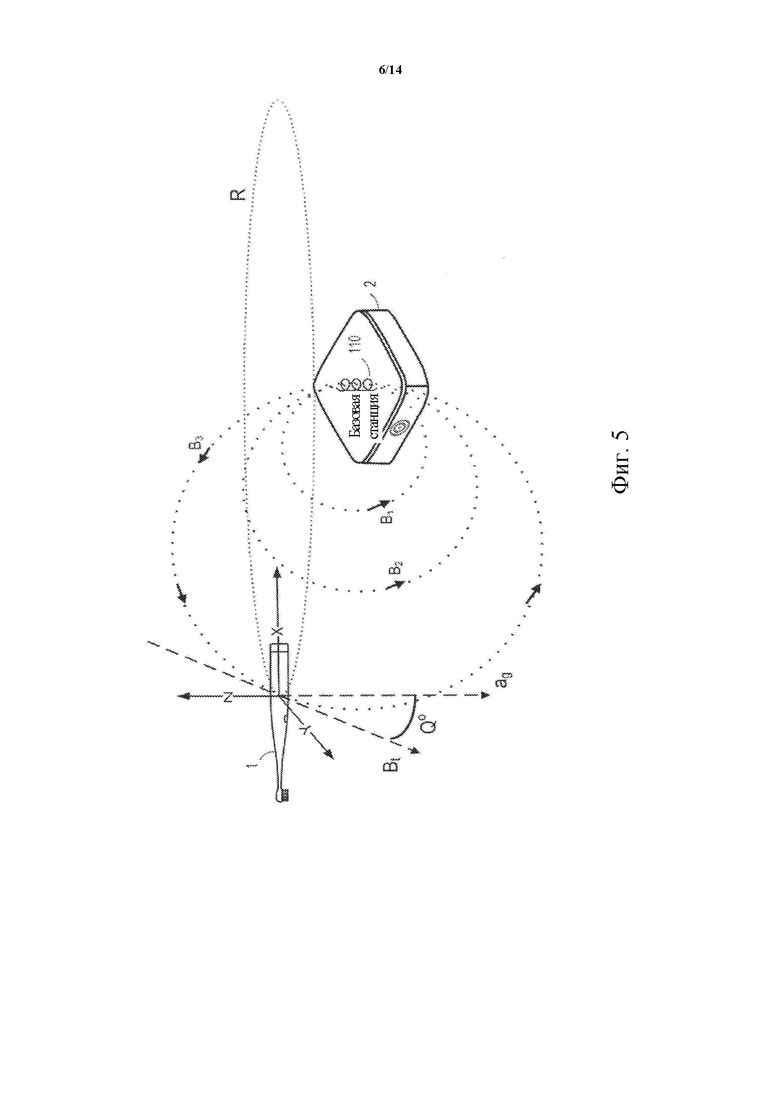
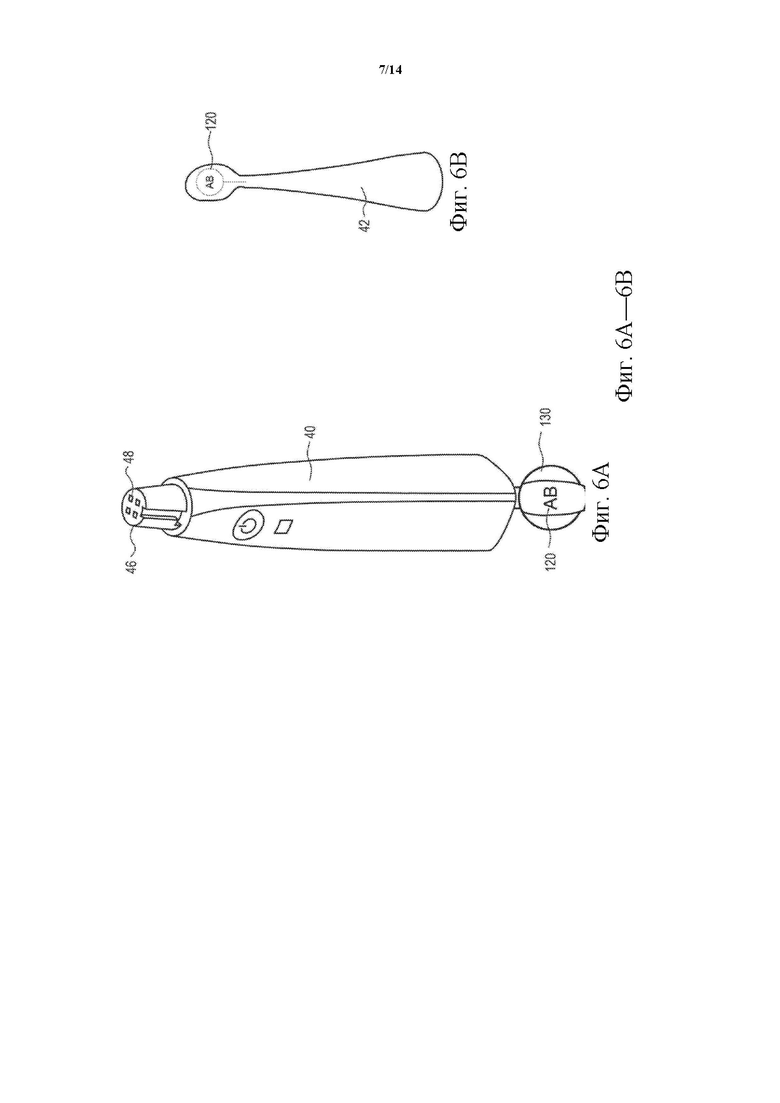
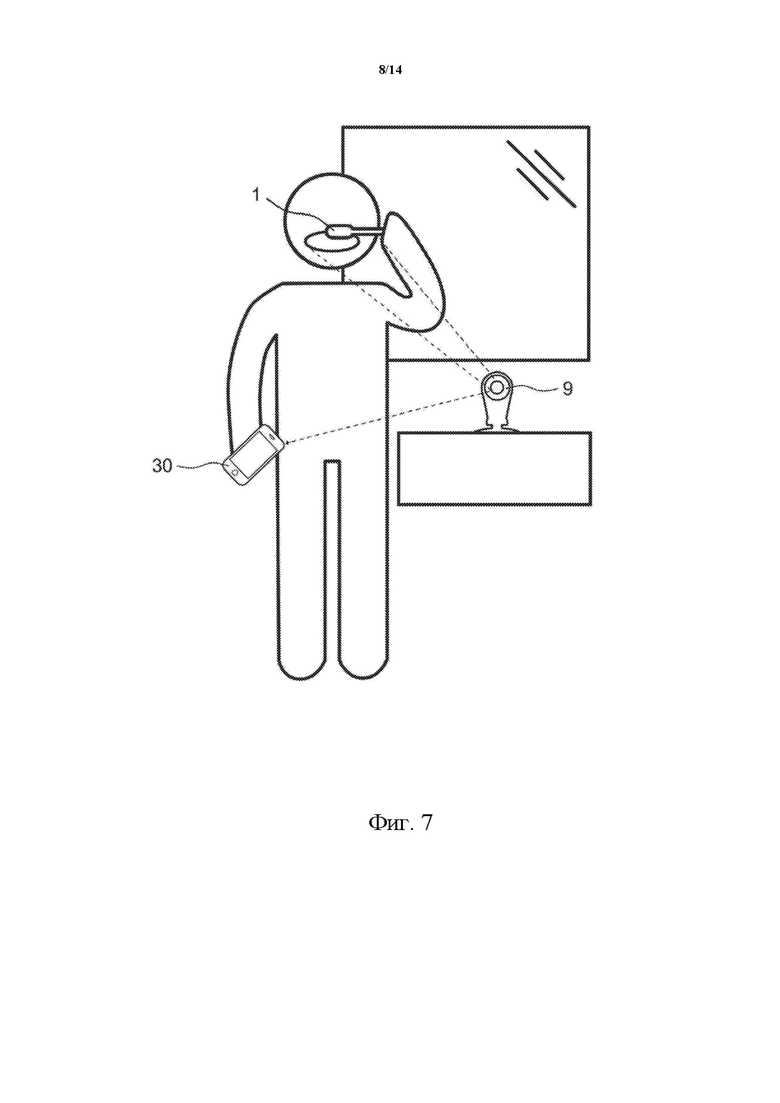
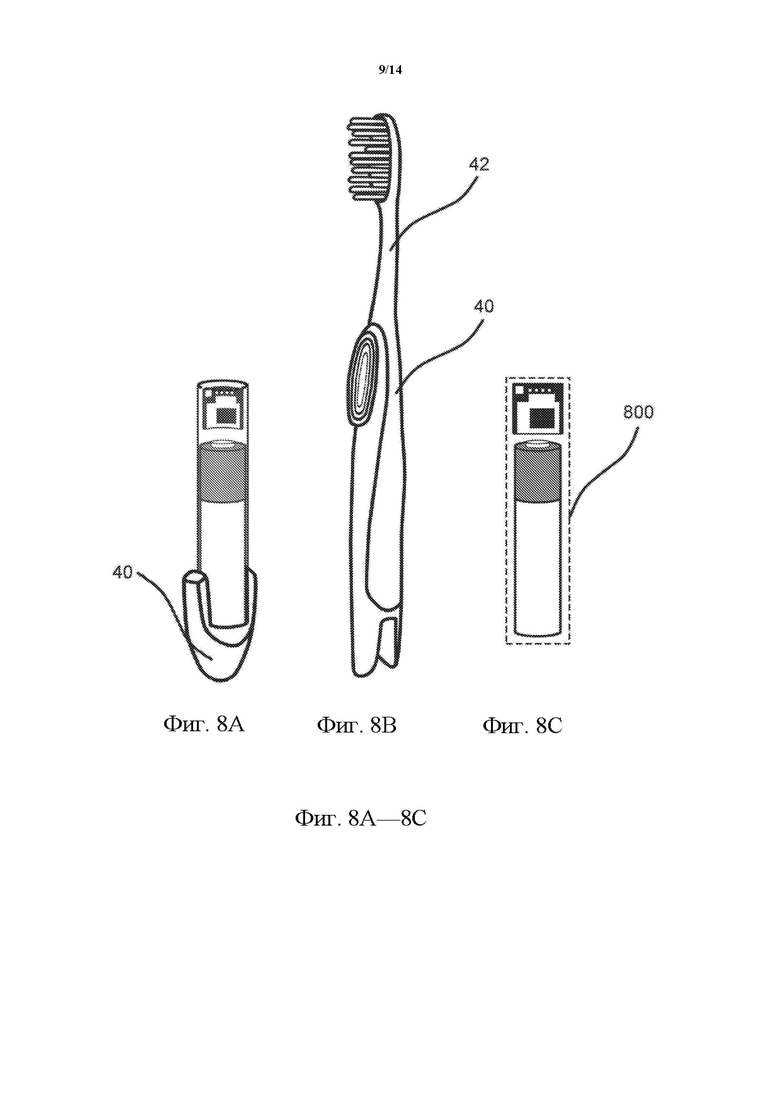
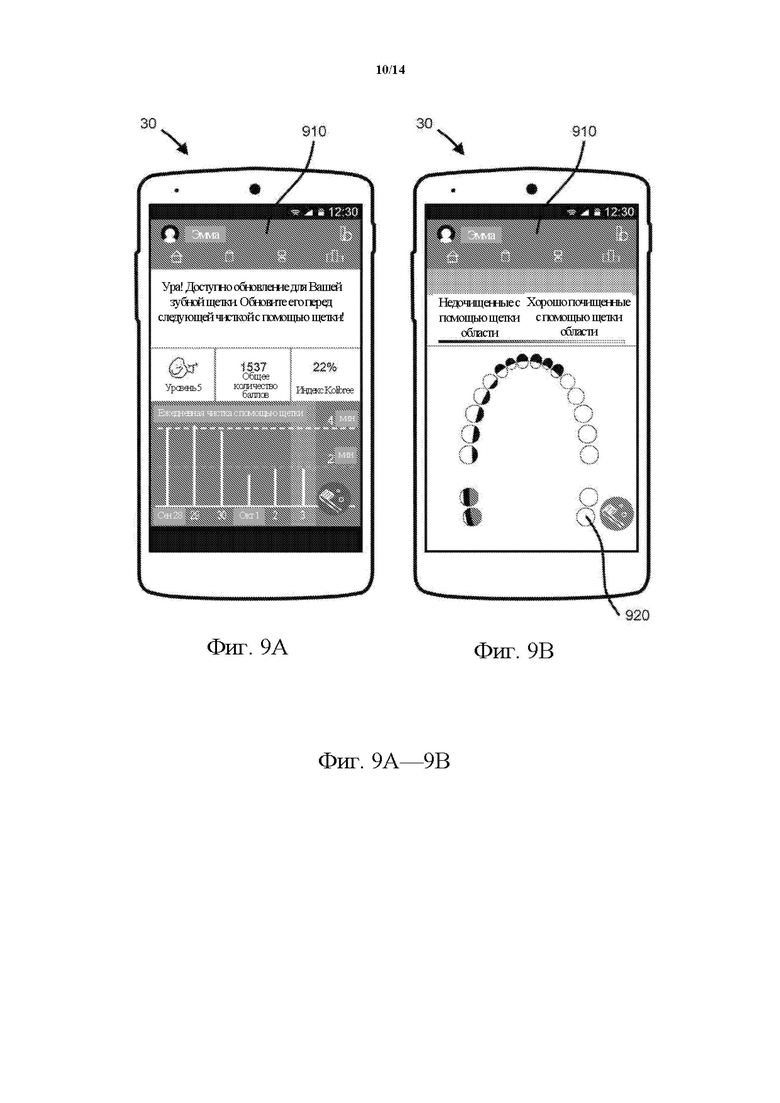
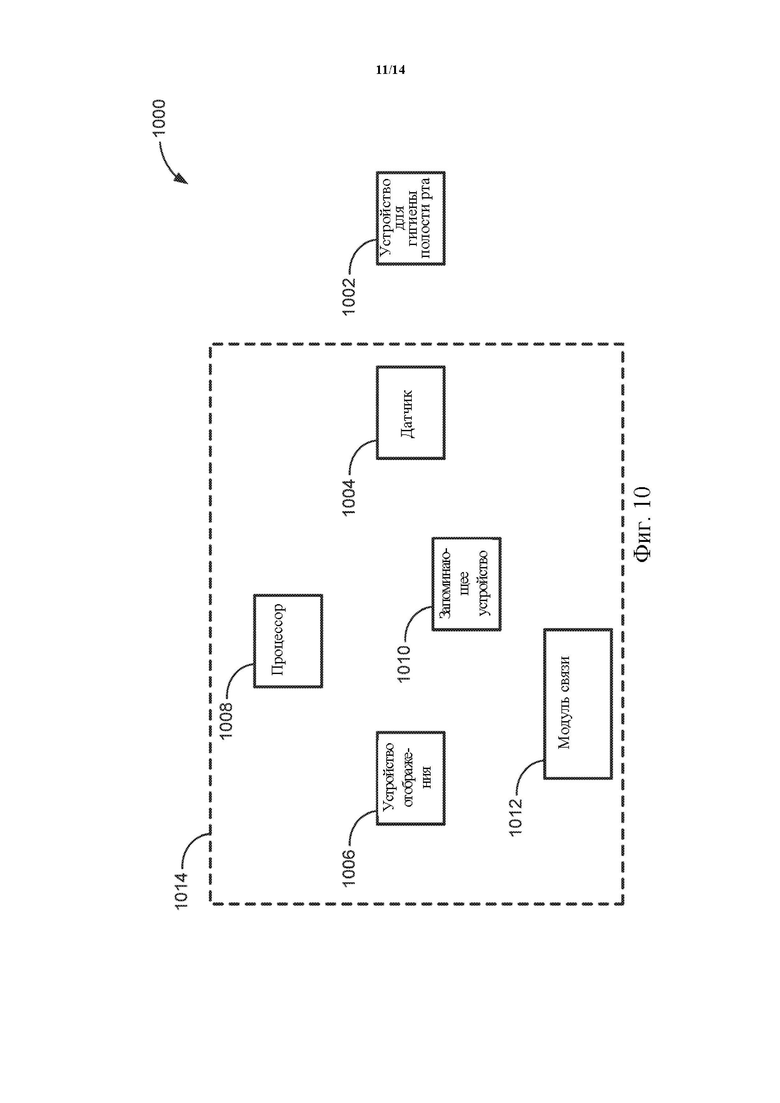
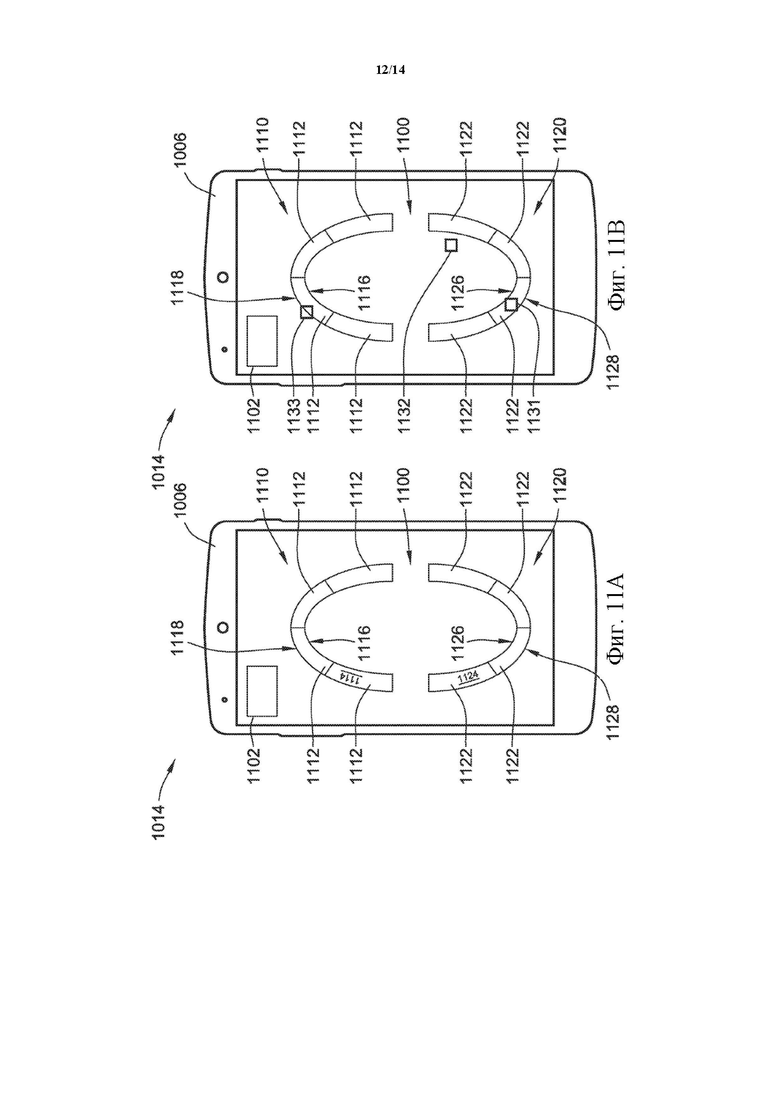
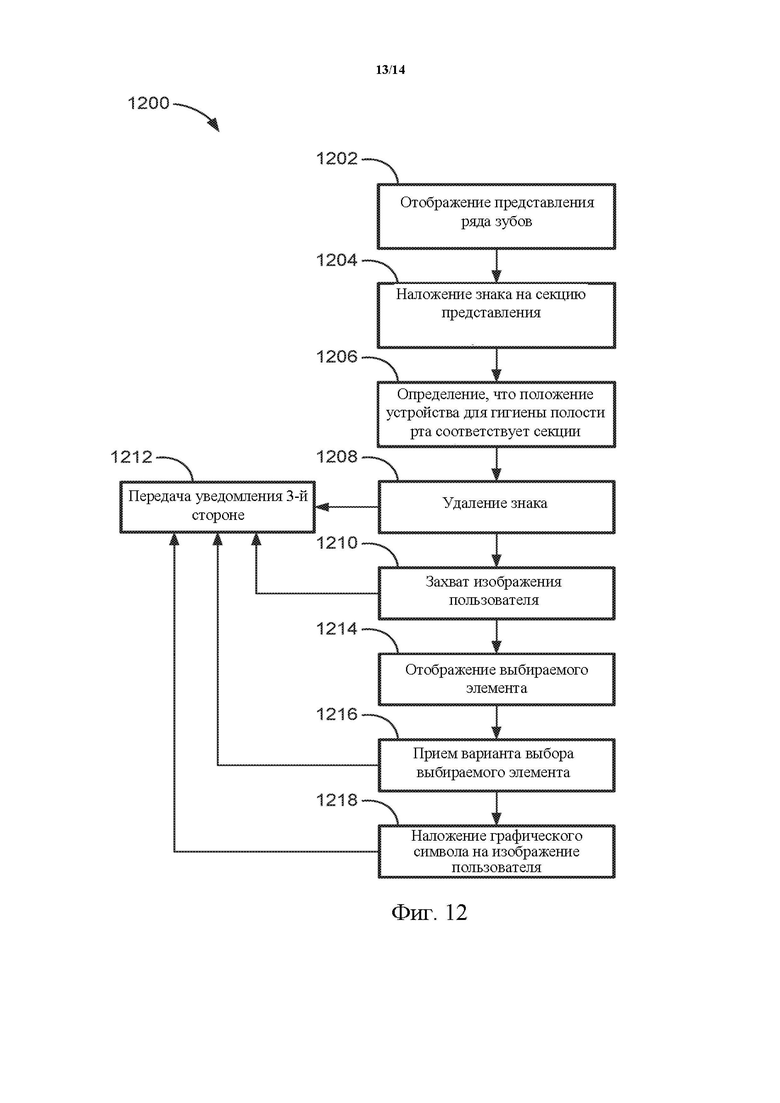
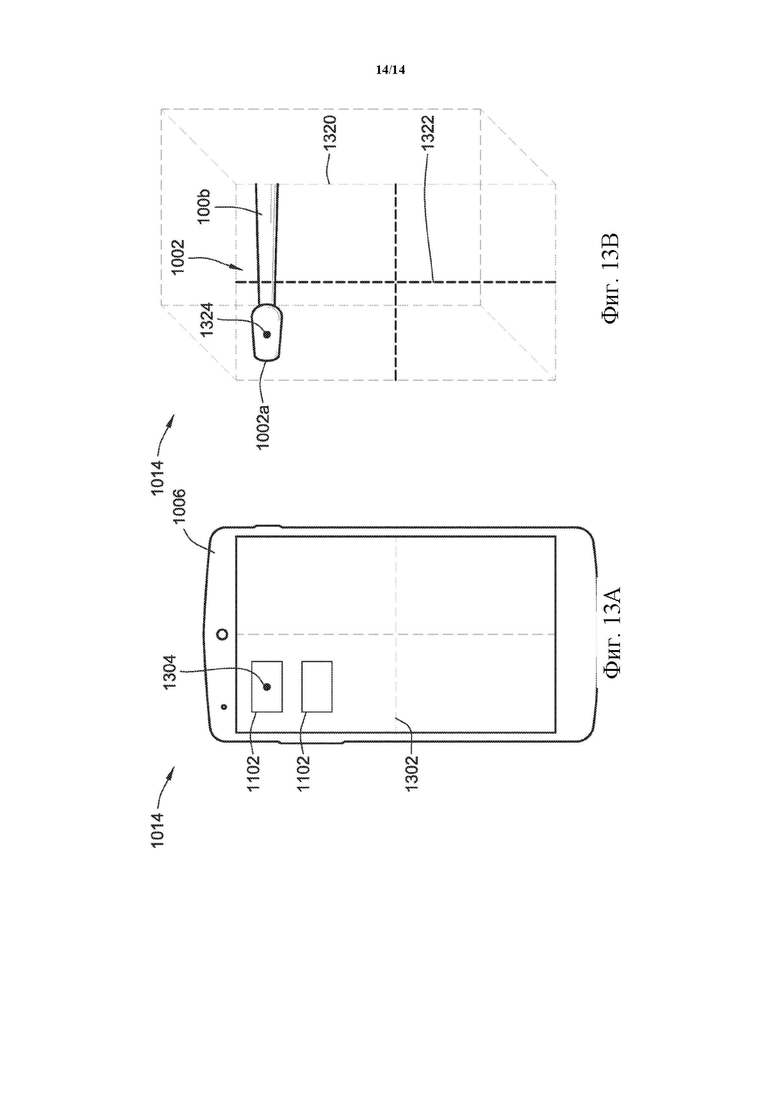
Группа изобретений относится к системе для гигиены полости рта и способу оказания содействия соблюдению схемы гигиены полости рта. Способ оказания содействия соблюдению схемы гигиены полости рта включает отображение на устройстве отображения представления по меньшей мере части ряда зубов пользователя. Способ также включает наложение знака на представление так, что знак связан с первой секцией представления. В ответ на определение посредством по меньшей мере одного из одного или более процессоров, что головка устройства для гигиены полости рта расположена непосредственно возле первой секции ряда зубов, которая соответствует первой секции представления, в течение по меньшей мере предопределенного количества времени, знак удаляется с устройства отображения. Изобретение позволяет соблюдать рекомендации стоматолога, уменьшить заболевания десен и других осложнений зубов вследствие недостатка чистки с помощью щетки. 2 н. и 18 з.п. ф-лы, 23 ил.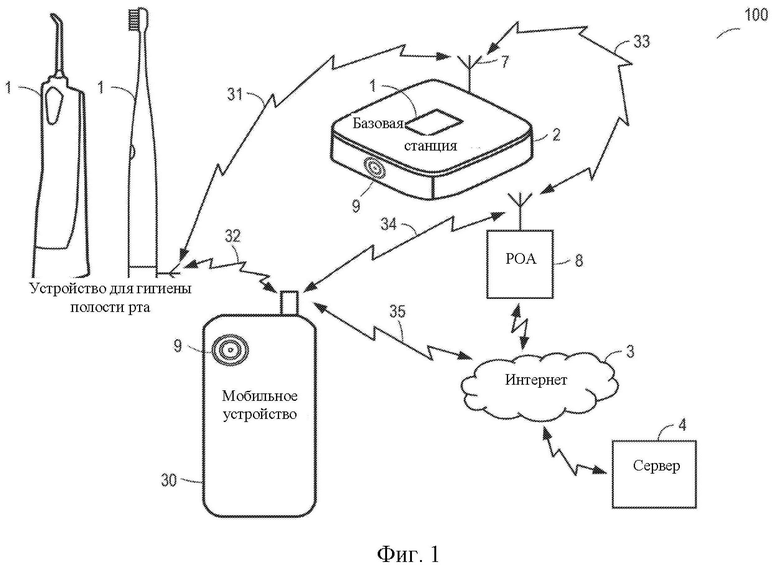
1. Способ оказания содействия соблюдению схемы гигиены полости рта, при этом способ включает:
отображение на устройстве отображения представления по меньшей мере части ряда зубов пользователя;
наложение знака на представление так, что знак связан с первой секцией представления; и
в ответ на определение посредством по меньшей мере одного из одного или более процессоров, что головка устройства для гигиены полости рта расположена непосредственно возле первой секции ряда зубов, которая соответствует первой секции представления, в течение по меньшей мере предопределенного количества времени, обеспечение удаления знака с устройства отображения и
отображение выбираемого элемента на устройстве отображения, при этом выбираемый элемент находится в первом местоположении в системе координат, при этом первое местоположение в системе координат связано с местоположением в объемном пространстве обычно перед устройством отображения; и, в ответ на определение посредством по меньшей мере одного из одного или более процессоров, что головка устройства для гигиены полости рта находится в пределах предопределенного расстояния от местоположения в объемном пространстве, связанного с первым местоположением в системе координат, в течение предопределенного количества времени, прием варианта выбора выбираемого элемента.
2. Способ по п. 1, отличающийся тем, что дополнительно включает, в ответ на удаление знака, передачу уведомления третьей стороне посредством модуля связи.
3. Способ по п. 1, отличающийся тем, что дополнительно включает захват изображения пользователя с использованием камеры и отображение изображения пользователя на устройстве отображения.
4. Способ по п. 1, отличающийся тем, что дополнительно включает захват изображения пользователя с использованием камеры и отображение изображения пользователя на устройстве отображения, а также после приема варианта выбора выбираемого элемента передачу изображения пользователя третьей стороне посредством модуля связи.
5. Способ по п. 1, отличающийся тем, что дополнительно включает захват изображения пользователя с использованием камеры и отображение изображения пользователя на устройстве отображения, а также после приема варианта выбора выбираемого элемента наложение графического символа, связанного с выбираемым элементом, на изображение пользователя на устройстве отображения.
6. Способ по п. 5, отличающийся тем, что дополнительно включает передачу изображения пользователя и наложенного графического символа третьей стороне посредством модуля связи.
7. Способ по п. 1, отличающийся тем, что определение дополнительно включает определение, что перемещение головки устройства для гигиены полости рта соответствует предопределенному типу прохода щетки, при этом предопределенный тип прохода щетки представляет собой проход щетки по кругу, проход щетки назад и вперед, проход щетки под углом или любую их комбинацию.
8. Способ по п. 1, отличающийся тем, что представление первой секции зубов соответствует полному ряду верхнечелюстных зубов или полному ряду нижнечелюстных зубов.
9. Способ по п. 1, отличающийся тем, что первая секция представления соответствует одной из нескольких секций полного ряда верхнечелюстных зубов или одной из нескольких секций полного ряда нижнечелюстных зубов.
10. Способ по п. 1, отличающийся тем, что первая секция ряда зубов имеет внутреннюю поверхность, внешнюю поверхность и окклюзионную поверхность, при этом определение дополнительно включает определение, что головка устройства для гигиены полости рта расположена непосредственно возле одной из внутренней поверхности, внешней поверхности или окклюзионной поверхности ряда зубов.
11. Система для гигиены полости рта, при этом система содержит:
устройство для гигиены полости рта, содержащее рукоятку и головку;
датчик;
устройство отображения;
один или более процессоров и
запоминающее устройство, хранящее команды, которые при исполнении по меньшей мере одним из одного или более процессоров обеспечивают выполнение системой для гигиены полости рта:
отображения на устройстве отображения представления по меньшей мере части ряда зубов пользователя;
наложения знака на представление так, что знак связан с первой секцией представления;
в ответ на определение посредством по меньшей мере одного из одного или более процессоров, что головка устройства для гигиены полости рта расположена непосредственно возле первой секции ряда зубов, которая соответствует первой секции представления, в течение по меньшей мере предопределенного количества времени, удаления знака с дисплея,
команды при исполнении по меньшей мере одним из одного или более процессоров обеспечивают отображение системой для гигиены полости рта выбираемого элемента на устройстве отображения, при этом выбираемый элемент находится в первом местоположении в системе координат, при этом первое местоположение в системе координат связано с местоположением в объемном пространстве обычно перед устройством отображения; и, в ответ на определение посредством датчика, что головка устройства для гигиены полости рта находится в пределах предопределенного расстояния от местоположения в объемном пространстве, связанного с первым местоположением в системе координат, в течение предопределенного количества времени, прием варианта выбора выбираемого элемента.
12. Система по п. 11, отличающаяся тем, что дополнительно содержит модуль связи, который выполнен с возможностью передачи уведомления третьей стороне в ответ на удаление знака с устройства отображения.
13. Система по п. 11, отличающаяся тем, что дополнительно содержит камеру, выполненную с возможностью захвата изображения пользователя, при этом команды при исполнении по меньшей мере одним из одного или более процессоров обеспечивают отображение устройством отображения изображения пользователя.
14. Система по п. 13, отличающаяся тем, что дополнительно содержит модуль связи, который выполнен с возможностью передачи изображения пользователя третьей стороне.
15. Система по п. 11, отличающаяся тем, что команды при исполнении по меньшей мере одним из одного или более процессоров обеспечивают наложение системой для гигиены полости рта графического символа, связанного с выбираемым элементом, на изображение пользователя на устройстве отображения в ответ на прием варианта выбора выбираемого элемента.
16. Система по п. 15, отличающаяся тем, что дополнительно содержит модуль связи, который выполнен с возможностью передачи изображения пользователя и наложенного графического символа третьей стороне.
17. Система по п. 11, отличающаяся тем, что определение дополнительно включает определение, что перемещение головки устройства для гигиены полости рта соответствует предопределенному типу прохода щетки, и при этом предопределенный тип прохода щетки представляет собой проход щетки по кругу, проход щетки назад и вперед, проход щетки под углом или любую их комбинацию.
18. Система по п. 11, отличающаяся тем, что первая секция представления соответствует полному ряду верхнечелюстных зубов или полному ряду нижнечелюстных зубов.
19. Система по п. 11, отличающаяся тем, что первая секция представления соответствует одной из нескольких секций полного ряда верхнечелюстных зубов или одной из нескольких секций полного ряда нижнечелюстных зубов.
20. Система по п. 11, отличающаяся тем, что датчик представляет собой оптический датчик, датчик движения, гирометр, магнитометр, акселерометр, камеру или любую их комбинацию.
| US 2015044629 A1, 12.02.2015 | |||
| US 2009215015 A1, 27.08.2009 | |||
| US 2008109973 A1, 15.05.2008 | |||
| US 2017069083 A1, 09.03.2017 | |||
| ИНТЕРАКТИВНАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА | 2008 |
|
RU2404696C1 |
| УСТРОЙСТВО ИНДИВИДУАЛЬНОГО УХОДА, ИМЕЮЩЕЕ ДИСПЛЕЙ | 2008 |
|
RU2421116C1 |

