ОБЛАСТЬ ТЕХНИКИ
[01] Настоящее изобретение относится к способам и устройствам для контроля деятельности в области гигиены ротовой полости.
УРОВЕНЬ ТЕХНИКИ
[02] Соблюдение надлежащей методики и частоты деятельности в области гигиены ротовой полости, включающей в себя чистку щеткой и чистку межзубных промежутков, имеет важное значение для здоровых зубов. Однако соблюдение правил чистки зубов является особенно плохим среди детей и подростков. Например, многие области рта часто пропускаются после развития плохих привычек. Соответственно, если бы количество чистки щеткой и методику можно было контролировать, соблюдение требований, возможно, можно было бы повысить. Однако контролировать методику использования устройства для гигиены ротовой полости и количество времени в каждой зоне довольно трудно из-за различных технологических ограничений.
[03] По данным CDC, кариес зубов, хотя и предотвратим, является самым распространенным хроническим заболеванием детей в возрасте 6-11 (25%) и подростков в возрасте от 12 до 19 лет (59%). Кроме того, 28% взрослых в возрасте от 35 до 44 имеют нелеченный кариес зубов. Бактериальная биопленка, называемая налетом, которая развивается на зубах, способствует развитию кариеса зубов и гингивита. Однако налет можно удалять посредством чистки щеткой по меньшей мере один раз в день в течение двух минут и предпочтительно два раза в день и, следовательно, предотвращать или уменьшать вероятность развития кариеса зубов. Atlin T and Horecker E., ʺTooth Brushing and Oral Health: How Frequently and When Should Tooth Brushing be Performed,ʺ Oral Health & Prevention Dentistry, 2005 3 (3): 135-140.
[04] Кроме того, исследование показывает, что дети постоянно пропускают одни и те же зоны при чистке щеткой, что приводит к изолированным скоплениям налета на определенных зубах. Кроме того, более важным, чем продолжительность времени чистки щеткой, является эффективность чистки зубов щеткой. Кроме того, было показано, что санитарное просвещение по вопросам здоровья зубов оказывает лишь небольшой и временный эффект на накопление налета. Atlin T and Horecker E., ʺTooth Brushing and Oral Health: How Frequently and When Should Tooth Brushing be Performed,ʺ Oral Health & Prevention Dentistry, 2005 3 (3): 135-140. Кроме того, многие зубные пасты включают в себя фторид, который способствует возобновлению роста зубной эмали для предотвращения образования кариозных полостей. По данным Американской стоматологической ассоциации соблюдение правил чистки зубов щеткой является довольно низким. Например, только 49% мужчин и 57% женщин чистят зубы щеткой два раза в день.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[05] Соответственно, существует потребность в стоматологической системе, которая могла бы повысить соблюдение пользователем рекомендованных зубным врачом режимов чистки зубов щеткой, чистки межзубных промежутков или другой деятельности в области гигиены ротовой полости для сокращения кариозных полостей, заболеваний десен и других стоматологических осложнений от недостатка чистки щеткой. Настоящим изобретением предлагаются системы и способы контроля использования устройства для гигиены ротовой полости и электронного предоставления обратной связи и других стимулов пользователю для повышения соблюдения правил чистки зубов
[06] Система позволяет осуществлять запись деятельности по чистке зубов щеткой (или другой деятельности в области гигиены ротовой полости) и анализ такой деятельности. Она позволяет создавать службу, которая предоставляет обратную связь и стимулы для пользователя системы гигиены ротовой полости. Устройство для гигиены ротовой полости или связанные компоненты системы, включающие в себя, например, камеру, записывает данные чистки зубной щеткой посредством датчиков при его использовании. В некоторых вариантах осуществления данные анализируются и сравниваются с эталонными данными. Например, раскрывается один или более оптический датчик(-и), который отслеживает перемещение зубной щетки относительно рта. Изображения, выводимые оптическим датчиком(-ами) могут анализироваться для определения ориентации и движения зубной щетки относительно рта, и может определяться объем чистки щеткой в каждой области (или чистки межзубных промежутков посредством ирригатора).
[07] Посредством устройства вывода обратной связи пользователь получает советы по использованию системы и стимулы, а также другую обратную связь, предназначенную для повышения соблюдения рекомендованных режимов использования. Например, система может извещать пользователя о том, для каких областей рта была проведена чистка щеткой или чистка межзубных промежутков и предоставлять пользователю обратную связь касательного того, где они могли бы больше чистить щеткой, или положений, которые они полностью пропустили. В другом примере система может реализовывать процесс игрофикации для повышения мотивации к использованию гигиенического устройства.
[08] В некоторых вариантах осуществления изобретение относится к способу для нового вида использования устройства для гигиены ротовой полости посредством информирования пользователя о его/ее практиках чистки щеткой, например посредством беспроводной интеграции с мобильным телекоммуникационным устройством или другим устройством, имеющим дисплей. Электрическая зубная щетка также может передавать данные беспроводным способом базовой станции, которая может затем отправлять данные сети для анализа на облачных серверах или беспроводным способом мобильному устройству. Мобильное телекоммуникационное устройство может представлять собой мобильный телефон, микрокомпьютер с телекоммуникационными средствами, планшетный компьютер с телекоммуникационными средствами. В других вариантах осуществления данные могут беспроводным способом отправляться базовой станции, а затем выгружаться на серверы для последующего доступа посредством вычислительных устройств, которые включают в себя как мобильные, так и немобильные вычислительные устройства. В некоторых примерах, система гигиены ротовой полости будет включать в себя один или более оптических датчиков или камер, которые отслеживают перемещение стандартной зубной щетки, и камера будет интегрироваться с мобильным устройством, базовой станцией, локальной сетью или другими вычислительными устройствами. В этом примере, может использоваться любая стандартная зубная щетка или ирригатор, который не включает в себя электронику или датчики движения.
[09] Система устройства для гигиены ротовой полости может включать в себя устройство для гигиены ротовой полости с датчиками и базовой станцией, при этом базовая станция физически поддерживает устройство для гигиены ротовой полости, когда пользователь не осуществляет с ним манипуляций. Электронное устройство для гигиены ротовой полости может включать в себя (a) схему обработки сигналов, (b) память, (c) интерфейс базовой станции для обмена данными между устройством для гигиены ротовой полости и базовой станцией, (d) схему питания, которая может включать в себя перезаряжаемую батарею или конденсатор, и (e) контроллер.
[010] Базовая станция и/или камера может включать в себя (a) сетевой интерфейс для обмена данными между интернетом или другой сетью и базовой станцией, и (b) цепь перезарядки для перезарядки перезаряжаемой батареи зубной щетки, которая необязательно может также выступать в качестве магнитного передатчика в соединении с датчиком-магнитометром в зубной щетке. В других вариантах осуществления система может не включать в себя базовую станцию, и сигналы могут отправляться беспроводным способом непосредственно мобильному телефону или другому беспроводному терминалу или отдельная система оптического датчика/камеры может записывать оптические данные и отправлять их непосредственно мобильному устройству, другому вычислительному устройству или сети для анализа. В некоторых вариантах осуществления базовая станция может включать в себя камеру для контроля и идентификации кодов на устройстве для гигиены ротовой полости для визуального отслеживания перемещения.
[011] Система устройства для гигиены ротовой полости может включать в себя камеру, расположенную отдельно от устройства для гигиены ротовой полости, для записи изображений устройства для гигиены ротовой полости при чистке щеткой. Программное обеспечение для обработки изображений может затем анализировать движение устройства для гигиены ротовой полости при чистке щеткой независимо или в дополнение к данным от датчиков движения, прикрепленных к зубной щетке. Например, устройство для гигиены ротовой полости может не включать в себя никакой электроники и может вместо этого представлять собой стандартную зубную щетку. В этом примере камера и система обработки изображений могут самостоятельно определять положение чистки щеткой и время для каждой секции зубов.
[012] Например, оптический датчик(-и) может записывать изображения на протяжении всего сеанса чистки щеткой, которые включают в себя рот, устройство для гигиены ротовой полости и зубы. Программное обеспечение для обработки изображений может затем идентифицировать зубную щетку, характерные признаки зубной щетки, рот и относительные положения каждого из них для определения секции и времени чистки щеткой, или используя другие способы, как далее описано в настоящем документе.
[013] В некоторых примерах, устройство для гигиены ротовой полости может включать в себя шаблон для улучшенного распознавания и расчета пространственной ориентации. В некоторых примерах насадка для устройства для гигиены ротовой полости также может содержать или включать в себя шаблон. Кроме того, система может комбинировать выходные данные движения датчиков от электроники на устройстве для гигиены ротовой полости с данными изображений для определения секции или участка зубов, которые пользователь чистит щеткой.
Электрическая конфигурация
[014] Система(-мы) управления устройства для гигиены ротовой полости может быть выполнена с возможностью координирования обмена данными между устройством для гигиены ротовой полости, оптическим датчиком(-ами), базовой станцией, мобильным устройством и/или другими сетевыми устройствами для передачи обработанных сигналов от датчиков и/или оптического датчика для обработки. В некоторых вариантах осуществления система 100 устройства для гигиены ротовой полости и связанная система управления может включать в себя схемы формирования сигналов для обработки сигналов от датчиков, память для хранения обработанных сигналов от датчиков, интерфейсную схему устройства для гигиены ротовой полости для обеспечения возможности обмена информацией между устройством для гигиены ротовой полости и базовой станцией или другими электронными компонентами, схему электропитания устройства для гигиены ротовой полости для питания датчиков и схем зубной щетки, включающую в себя перезаряжаемый электрический источник питания батарейного и/или конденсаторного типа, и схему контроллера для управления работой электроники зубной щетки.
[015] Базовая станция, оптический датчик(и) и/или другое связанное устройство-камера может включать в себя следующие схемы: схему обмена данными для обмена данными с сетью, интерфейсную схему, адаптированную к обмену информацией с устройством для гигиены ротовой полости, цепь подачи питания базовой станции для питания схем базовой станции и для перезарядки перезаряжаемого электрического источника питания устройства для гигиены ротовой полости, когда оно принимается в базовой станции. Базовая станция может также включать в себя передатчик магнитного поля, которым может выступать схема подачи питания или перезарядки, или который может представлять собой отдельный передатчик магнитного поля. Базовая станция или другое электронное устройство может также включать в себя камеру и связанную электронику. Управляющая схема может быть выполнена с возможностью сохранения в памяти обработанных сигналов от датчиков по обнаружении использования зубной щетки пользователем, и отдачи команды, при приеме устройства для гигиены ротовой полости в базовой станции, схеме обмена данными базовой станции или другого электронного устройства на передачу сохраненных сигналов от датчиков, посредством интерфейсных схем устройства для гигиены ротовой полости и базовой станции или другого электронного устройства, по сети. В некоторых вариантах осуществления необработанные данные от датчиков могут сохраняться и отправляться по схеме обмена данными для обработки на базовой станции или обработки в другом месте.
Физическая конструкция
[016] В некоторых вариантах осуществления устройство для гигиены ротовой полости может включать в себя электронный двигатель для вызова вибрации головки устройства для гигиены ротовой полости при чистке щеткой. Кроме того, головка устройства для гигиены ротовой полости, которая включает в себя щетинки или ирригатор, может быть соединяема с возможностью снятия с корпусом или рукояткой устройства для гигиены ротовой полости и может быть выполнена с возможностью обеспечения взаимозаменяемости множества головок. Устройство для гигиены ротовой полости может быть водонепроницаемым. В некоторых вариантах осуществления базовая станция может быть выполнена с возможностью физического приема только одного, двух, трех, четырех или пяти, или дополнительных количеств зубных щеток или других головок для гигиены ротовой полости.
[017] В некоторых вариантах осуществления устройство для гигиены ротовой полости может включать в себя визуальные коды или шаблоны, которые могут обнаруживаться и отслеживаться камерой или детектором на основе визуального восприятия. Например, головка устройства для гигиены ротовой полости может включать в себя шаблон, и рукоятка может включать в себя шаблон. В некоторых вариантах осуществления рукоятка может включать в себя приставную выпуклость или выступ на конце, который включает в себя больший шаблон для обнаружения камерой. Эта «выпуклость или выступ» может представлять собой специальную приставку, прикрепляемую к рукоятке, которая не обязательно является частью зубной щетки.
[018] Кроме того, эта приставка может также выступать подставкой для зубной щетки. Например, выпуклость может балластировать устройство для гигиены ротовой полости водой. Соответственно, приставка может представлять собой пустую полусферу с водой или другим тяжелым веществом в нижней части. Это может обеспечивать новизну, заключающуюся в предоставлении пользователю возможности ставить устройство для гигиены ротовой полости на многие поверхности, при этом оно стояло бы вертикально, независимо от угла, под которым оно ставится.
Датчики
[019] Датчик(-и) может включать в себя один или более оптических датчиков, отдельных от устройства для гигиены ротовой полости, которые могут записывать изображения устройства для гигиены ротовой полости по мере его использования. Если используются два или более оптических датчиков, изображения могут использоваться для стереоскопического отслеживания перемещения и расстояния устройства для гигиены ротовой полости.
[020] В вариантах осуществления, в которых устройство для гигиены ротовой полости включает в себя электронику, датчики устройства для гигиены ротовой полости могут представлять собой один или более: i) датчик (10) давления, датчики (11) движения, или ii) любой другой тип(-ы) датчиков, способных измерять деятельность по чистке щеткой зубной щетки, таких как акселерометр или инерциальный датчик. Это может включать в себя акселерометры, магнитометры и гироскопы и/или гирометры. В некоторых вариантах осуществления устройство для гигиены ротовой полости может включать в себя по меньшей мере датчик давления и по меньшей мере один датчик ускорения. В некоторых вариантах осуществления обработанные сигналы от датчиков передаются серверу по сети через базовую станцию. Кроме того, обработанные сигналы от датчиков передаются серверу по сети через мобильное устройство.
[021] В других вариантах осуществления устройство для гигиены ротовой полости может иметь шаблоны для распознавания посредством датчиков на основе визуального восприятия, которые являются стационарными и удаленными от зубной щетки, или может представлять собой только стандартную зубную щетку. Например, в качестве оптического датчика для контроля ориентации и положения зубной щетки может использоваться камера мобильного телефона или камера в базовой станции. В этих вариантах осуществления устройство для гигиены ротовой полости может также включать в себя датчики движения или в других вариантах осуществления может не иметь электроники для снижения стоимости изготовления. Вместо этого, устройство для гигиены ротовой полости может иметь только шаблоны для распознавания камерой или может не иметь шаблонов, и система обработки изображений может распознавать форму, ось и ориентацию устройства для гигиены ротовой полости, как далее раскрывается в настоящем документе.
Вычислительные устройства
[022] В некоторых вариантах осуществления мобильное телекоммуникационное устройство представляет собой мобильный телефон, микрокомпьютер с телекоммуникационными средствами, планшетный компьютер с телекоммуникационными средствами или любое другое средство, имеющее средство отображения для отображения информации, относящейся к деятельности по чистке зубов щеткой, и имеющее схемы для подключения к глобальной сети и для осуществления связи с глобальной сетью. Например, мобильное устройство может обычно представлять собой мобильный телефон, но может также состоять из других типов мобильных устройств КПК («КПК») или иных устройств с возможностью осуществления радиосвязи или даже микрокомпьютер-ноутбук или настольный компьютер с телекоммуникационными средствами, планшетный компьютер с телекоммуникационными средствами. В других вариантах осуществления сигналы можно просматривать на стационарном вычислительном устройстве, которое осуществляет доступ к данным посредством облачных серверов.
Обработка сигналов
[023] В некоторых вариантах осуществления с электроникой в зубной щетке система управления устройства для гигиены ротовой полости выполнена с возможностью хранения обработанных сигналов от датчиков в памяти. В некоторых вариантах осуществления система управления может вместо этого сохранять необработанные данные от датчиков в памяти для отправки базовой станции или другому компоненту системы, где могут обрабатываться необработанные данные. Система управления координирует получение, обработку и хранение сигналов, когда система управления и/или другой процессор в системе определяет, что пользователь инициировал чистку щеткой. В других вариантах осуществления система управления может координировать хранение и отправку необработанных данных для обработки в другом месте. Далее, система управления может быть выполнена с возможностью отправки сохраненных сигналов беспроводным способом базовой станции или вычислительному устройству для дальнейшей обработки или начальной обработки, отображения или анализа. В некоторых вариантах осуществления устройство для гигиены ротовой полости может не содержать контроллер или какую-либо электронику.
[024] Обработка сигналов может включать в себя фильтрацию, усиление, преобразование, преобразование сигналов из аналоговых в цифровые, цифровую фильтрацию, сжатие цифровых данных, сокращение цифровых данных, вычисление цифровых данных и преобразование цифровых данных. Это может выполняться в нескольких разных аспектах системы, включающих в себя устройство для гигиены ротовой полости, базовую станцию, связанный мобильный телефон, сервер, связанный посредством сети с системой или с другими местами.
Протоколы и передача данных
[025] В некоторых вариантах осуществления интерфейсная схема устройства для гигиены ротовой полости и интерфейсные схемы базовой станции и/или устройства-камеры представляют собой беспроводные схемы, например: WiFi®, Bluetooth®, GSM/UMTS и производные. В некоторых вариантах осуществления схема обмена данными базовой станции использует протокол беспроводной связи, например: WiFi®, Bluetooth®, GSM или другие. В некоторых вариантах осуществления устройство для гигиены ротовой полости может иметь уникальный идентификатор для обеспечения возможности связывания мобильного устройства и зубной щетки.
[026] В других вариантах осуществления интерфейсная схема устройства для гигиены ротовой полости и интерфейсная схема камеры/базовой станции может использовать проводные соединения. Например, соединение схемы обмена данными с сетью является проводным. Идентификационные данные могут включаться в пакеты данных, которые включают в себя сохраненные сигналы от датчиков, отправляемые по сети. Идентификация может включать в себя заводской идентификационный номер устройства для гигиены ротовой полости или головки, заводской идентификационный номер базовой станции или сетевой адрес базовой станции. Кроме того, данным контроля чистки зубов щеткой, полученные при выполнении этапа измерения, может присваиваться метка времени, используя данные от внутренних часов устройства для гигиены ротовой полости.
[027] В других вариантах осуществления сеть содержит по меньшей мере беспроводную локальную сеть (WLAN), и при выполнении этапа связи устройство для гигиены ротовой полости передает данные упомянутому мобильному устройству посредством упомянутой WLAN. WLAN может работать в соответствии с протоколом связи, выбираемом из протоколов Wi-Fi или Bluetooth. Мобильное устройство, устройство-камера или иное вычислительное устройство может также находиться на связи с локальной беспроводной локальной сетью, и на этапе связи зубная щетка передает упомянутые данные мобильному устройству посредством упомянутой беспроводной LAN.
[028] LAN может включать в себя сервер, который осуществляет связь по меньшей мере с зубной щеткой, и на этапе связи устройство для гигиены ротовой полости может передавать упомянутые данные мобильному устройству посредством сервера. Телекоммуникационная сеть может далее содержать сеть отдельных удаленных беспроводных LAN, сервер, осуществляющий связь по меньшей мере с одним сервером посредством упомянутой удаленной сети, мобильное устройство, также осуществляющее связь с упомянутым сервером посредством удаленной сети.
[029] Информация, обмен которой осуществляется между устройством для гигиены ротовой полости, камерой, оптическим устройством-датчиком(-ами), мобильным устройством и/или базовой станцией посредством интерфейсных схем, может включать в себя данные или команды, при этом данные включают в себя сохраненные обработанные сигналы от датчиков или необработанные сигналы от датчиков. Информация может передаваться от устройства для гигиены ротовой полости базовой станции и, наоборот, от базовой станции зубной щетке, в зависимости от потребности. Данные могут также представлять собой программу или обновление программного обеспечения для хранения и/или выполнения зубной щеткой. Например, обновления и новое встроенное программное обеспечение могут беспроводным способом загружаться и устанавливаться на зубной щетке.
Обработка данных на облачном сервере или в локальной сети
[030] В некоторых вариантах осуществления система включает в себя сервер, и сохраненные обработанные сигналы от датчиков или необработанные данные от датчиков (включающих в себя оптические датчики) передаются по сети упомянутому серверу, при этом сервер включает в себя средства хранения для передаваемых обработанных сигналов и включает в себя вычислительные компоненты под управлением программы или команд программного обеспечения. Программа имеет команды, выполненные с возможностью отправки, в конце передачи, команды на очистку по сети устройству для гигиены ротовой полости для очистки сигналов, хранящихся на устройстве для гигиены ротовой полости, которые были переданы серверу. Сервер может также определять местоположение устройства для гигиены ротовой полости, используя возможности геолокации удаленной сети и/или мобильного устройства.
[031] Сервер включает в себя память для хранения истории последовательных переданных сохраненных и обработанных сигналов от датчиков устройства для гигиены ротовой полости и/или необработанных данных от датчиков или связанной камеры (камер) и других устройств. Программа для управления вычислительными компонентами сервера включает в себя команды программного обеспечения для анализа и сравнения сохраненных и обработанных сигналов и для предоставления результатов вычислений по итогам упомянутого анализа и сравнения. Программа для управления вычислительными компонентами сервера может включать в себя команды для обеспечения доступности результатов анализа ряду вычислительных устройств, включающих в себя мобильное или стационарное устройство, посредством доступа к серверу через интернет-страницу или другим рядом способов. Вычислительный анализ с сервера может передаваться или загружаться непосредственно на вычислительное устройство посредством сетевого канала 35, который может быть реализован посредством канала 34 POA специального оборудования связи с базовой станцией. Соответственно, результаты вычислений от сервера передаются мобильному устройству по сети посредством POA специального оборудования связи и базовой станции и/или устройству для гигиены ротовой полости по каналам 33, 31 и 32. Когда устройство для гигиены ротовой полости работает и осуществляет связь с сервером, упомянутый сервер может обновлять программное обеспечение и/или параметры, запущенные и/или используемые в устройстве для гигиены ротовой полости. Аналогично, сервер может обновлять приложение или параметры, относящиеся к устройству для гигиены ротовой полости и которые запущены на мобильном устройстве.
Профиль пользователя
[032] Система может включать в себя сохраненный профиль пользователя, связанный с деятельностью по чистке зубов щеткой (или другой деятельностью в области гигиены ротовой полости), и его связанные данные содержат возраст, размер и пол пользователя. При или после выполнения этапа контроля деятельности (например, чистки зубов щеткой) в области гигиены ротовой полости, устройство для гигиены ротовой полости, мобильное устройство или сервер автоматически пытается соотнести пользователя с по меньшей мере одним профилем пользователя, используя по меньше мере одно предопределенное правило, в зависимости от профиля пользователя и прошлых данных. Если пользователь не является регулярным пользователем устройства для гигиены ротовой полости, упомянутый пользователь идентифицирует его/ее в качестве гостя на мобильном устройстве.
[033] На этапе идентификации пользователя, конкретный пользователь может быть связан с устройством для гигиены ротовой полости и сочтен пользователем. Если используется множество пользователей для данного устройства для гигиены ротовой полости, для связывания пользователя с деятельностью по чистке щеткой по меньшей мере в устройстве для гигиены ротовой полости и, возможно, в мобильном устройстве и/или сервере по меньшей мере для целей сравнения для двух последних.
[034] В вариантах осуществления в которых используется камера, профиль пользователя может иметь фото пользователя, выгруженное или связанное с профилем. Это позволит системе распознавания на основе визуального восприятия автоматически определить конкретного пользователя, связанного с профилем.
Вывод данных
[035] В некоторых вариантах осуществления устройство для гигиены ротовой полости передает данные в режиме реального времени мобильному устройству, устройству-камере, оптическому устройству-датчику, или другому вычислительному устройству, и на этапе отображения вычислительное устройство отображает в режиме реального времени на экране информацию, относящуюся к упомянутым данным, например моментный показатель выполнения пользователя для выполняемого эпизода чистки щеткой.
Калибровка/инициализация
[036] В некоторых вариантах осуществления устройство для гигиены ротовой полости и/или камера может калиброваться, либо на заводе, либо пользователем, либо и тем и другим. Если этап калибровки выполняется пользователем, пользователь может руководствоваться в этом процессе информацией, которая предоставляется, например, дисплеем мобильного устройства.
[037] В частности, система визуального отслеживания может калиброваться пользователем посредством приглашений от базовой станции или связанного электронного устройства (например, мобильного и/или оптического датчика(-ов)). Приглашения могут быть звуковыми или выводиться через пользовательский интерфейс. Программа калибровки может запросить пользователя встать на определенном расстоянии с устройством для гигиены ротовой полости и перемещаться в положениях чистки щеткой до тех пор, пока не будут выведены определенные световые или слышимые тональные сигналы. Система может калибровать устройство для гигиены ротовой полости с шаблонами или без них, и с электроникой, регистрирующей движение, или без нее.
[038] Эта система калибровки может обнаруживать размер и форму устройства для гигиены ротовой полости, и размер и форму головы пользователя, включая расстояние, на котором пользователь стоит от камеры. В некоторых вариантах осуществления пользователь может держать калибровочный инструмент размера стандартного устройства для гигиены ротовой полости для обеспечения камере (или другому оптическому датчику) возможности надлежащей калибровки расстояния. В некоторых вариантах осуществления данные движения могут комбинироваться с данными изображения для одновременной калибровки системы.
[039] На этапе инициализации система может обеспечивать возможность выбора желаемой локальной беспроводной сети или мобильного устройства. Это может выполняться автоматически или с помощью пользователя, и эти операции соответствуют сетевому связыванию между элементами системы, которые осуществляют между собой связь.
[040] В некоторых вариантах осуществления устройство для гигиены ротовой полости может включать в себя по меньшей мере датчик давления, по меньшей мере один датчик ускорения, схемы формирования сигналов для обработки сигналов от датчиков, схему памяти для хранения обработанных сигналов от датчиков, интерфейсную схему устройства для гигиены ротовой полости для обеспечения возможности передачи информации между устройством для гигиены ротовой полости и базовой станцией, схему подачи питания устройства для гигиены ротовой полости для питания датчиков и схем зубной щетки, при этом упомянутая схема подачи питания устройства для гигиены ротовой полости включает в себя перезаряжаемый электрический источник питания батарейного и/или конденсаторного типа и управляющую схему для работы схем устройства для гигиены ротовой полости. Предпочтительно, управляющая схема может быть выполнена с возможностью сохранения в памяти обработанных сигналов от датчиков по обнаружении использования зубной щетки пользователем, и отдачи команды, при приеме устройства для гигиены ротовой полости в базовой станции, схеме обмена данными базовой станции на передачу сохраненных обработанных сигналов от датчиков, посредством интерфейсных схем устройства для гигиены ротовой полости и базовой станции, по сети.
[041] В соответствии с изобретением базовая станция (и/или оптическое устройство-сенсор) включает в себя схему обмена данными с сетью, интерфейсную схему базовой станции, адаптированную к обмену информацией с устройством для гигиены ротовой полости и/или мобильный устройством или другим вычислительным устройством, схему подачи питания для питания схем базовой станции и для перезарядки перезаряжаемого электрического источника питания устройства для гигиены ротовой полости, когда оно принимается в базовой станции.
[042] С другой точки зрения настоящего изобретения, изобретением предлагается система, а также способ, использующий систему для контроля деятельности (например, чистки щеткой) в области гигиены ротовой полости, обеспечивающий возможность связи с мобильным устройством связи, имеющем средства отображения и ввода информации, устройством для гигиены ротовой полости и мобильным устройством, осуществляющим связь посредством радиооборудования с телекоммуникационной сетью, при этом упомянутая телекоммуникационная сеть адаптирована для обеспечения связи по меньшей мере мобильного устройства с по меньшей мере одним другим телекоммуникационным устройством, при этом способ содержит этапы: (a) по меньшей мере один этап контроля чистки зубов щеткой или деятельности в области гигиены ротовой полости, на котором устройство для гигиены ротовой полости выполняет по меньше мере одно измерение, указывающее на по меньшей мере чистку щеткой или другую деятельность пользователя в области гигиены ротовой полости, (b) по меньшей мере один этап двусторонней связи, в ходе которого: i) пользователь вводит информацию в мобильное устройство, и мобильное устройство передает упомянутую информацию устройству гигиены ротовой полости посредством телекоммуникационной сети, и ii) устройство для гигиены ротовой полости передает мобильному устройству данные в соответствии с упомянутым измерением для контроля деятельности по чистке зубов щеткой, и (c) по меньшей мере этап отображения или обратной связи, на котором мобильное устройство отображает на своем экране информацию на основе данных контроля деятельности по чистке зубов щеткой (или другой деятельности в области гигиены ротовой полости), передаваемых на этапе связи. Отображаемая информация может быть репрезентативной для результата вычислений, производимых над передаваемыми данными, при этом упомянутые вычисления производятся в мобильном устройстве или на сервере.
[043] Настоящим изобретением предлагается изделие и служба, которая улучшает использование и/или мотивацию пользователя чистить зубы или выполнять другую деятельность в области гигиены ротовой полости. Обратная связь обеспечивается посредством устройства вывода, связанного с системой. Система предоставляет устройство для гигиены ротовой полости, включающее в себя датчики, которые контролируют деятельность пользователя по чистке щеткой, и предоставляет обратную связь, относящуюся к чистке щеткой, пользователю. В некоторых вариантах осуществления сервер может предоставлять приложения, которые используют и обрабатывают данные, принимаемые от датчиков, для предоставления выходных данных, относящихся к качеству чистки щеткой и другому анализу. Наконец, приложения, выполняемые на сервере, могут обрабатывать эти выходные данные для предоставления обратной связи пользователю для предоставления игровой среды для повышения мотивации чистить зубы или межзубное пространство пользователя.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[044] Далее изобретение будет описано в отношении к примеру осуществления и следующим Фигурам:
[045] Фигура 1, которая представляет собой схематический вид системы изобретения, и
[046] Фигура 2 представляет собой диаграммный вид устройства для гигиены ротовой полости и примера базовой станции системы.
[047] Фигура 3A представляет собой вид в перспективе устройства для гигиены ротовой полости и головки в соответствии с одним вариантом осуществления настоящего изобретения.
[048] Фигура 3B представляет собой вид в перспективе рукоятки устройства для гигиены ротовой полости и сменных головок, которые могут крепиться к интерфейсу головки.
[049] Фигура 4 представляет собой структурную схему, иллюстрирующую вариант осуществления процесса, используемого в настоящем изобретении для записи данных чистки щеткой или других гигиенических данных и предоставления обратной связи пользователю.
[050] Фигура 5 представляет собой диаграмму устройства для гигиены ротовой полости и базовой станции, с генератором магнитного поля в базовой станции или другом связанном устройстве.
[051] Фигура 6 представляет собой вид в перспективе устройства для гигиены ротовой полости и головки с визуальными шаблонами в соответствии с одним вариантом осуществления настоящего изобретения.
[052] Фигура 7 представляет собой вид в перспективе системы, которая идентифицирует положение устройства для гигиены ротовой полости визуально без шаблона.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[053] Далее будут приведены различные примеры изобретения. В следующем описании приводятся конкретные подробности для глубокого понимания и обеспечения возможности описания этих примеров. Специалисту в данной области техники будет понятно, однако, что изобретение может быть осуществлено на практике без многих из этих подробностей. Аналогично, специалисту в данной области техники будет также понятно, что изобретение может включать в себя многие другие очевидные признаки, не описываемые здесь подробно. Кроме того, некоторые известные структуры или функции могут быть не показаны или не описаны подробно ниже, с тем чтобы неоправданно не затруднять понимание соответствующего описания.
[054] Используемую ниже терминологию следует толковать самым широким с разумной точки зрения образом, даже несмотря на то, что она используется вместе с подробным описанием определенных конкретных примеров изобретения. В действительности, определенным терминам ниже может придаваться особое значение; однако, любая терминология, которую следует толковать каким-либо ограниченным образом, будет явно и конкретно определена как таковая в настоящем разделе «Подробное описание».
[055] Были описаны частные варианты реализации объекта изобретения. Другие варианты реализации входят в объем нижеследующей формулы изобретения. В некоторых случаях, действия, изложенные в формуле изобретения, могут выполняться в другом порядке и по-прежнему достигать желаемых результатов. Кроме того, процессы, изображенные на сопровождающих фигурах, не обязательно требуют конкретного показанного порядка или последовательного порядка для достижения желаемых результатов.
[056] Хотя в настоящем описании содержится много конкретных подробностей реализации, их следует рассматривать не как ограничения объема каких-либо изобретений или пунктов формулы изобретения, но скорее как описания признаков, характерных для определенных вариантов реализации определенных изобретений. Определенные признаки, которые описываются в настоящем описании в контексте отдельных вариантов реализации, могут также быть реализованы в комбинации в едином варианте реализации. И наоборот, различные признаки, которые описываются в контексте единого варианта реализации, могут также быть реализованы во множестве вариантов реализации отдельно или в любой подходящей подкомбинации. Более того, хотя признаки могут быть описаны выше как действующие в определенных комбинациях и даже быть изначально заявленными таковыми, один или более признаков из заявленной комбинации может в некоторых случаях исключаться из комбинации, и заявленная комбинация может направляться к подкомбинации или варианту подкомбинации.
[057] Аналогичным образом, хотя операции могут изображаться на чертежах в определенном порядке, это не следует понимать как необходимость выполнения таких операций в определенном показанном порядке или в последовательном порядке, или выполнения всех проиллюстрированных операций для достижения желаемых результатов. В определенных обстоятельствах, может быть полезна многозадачность и параллельная обработка. Более того, разделение различных компонентов системы в вариантах реализации, описанных выше, не следует понимать как необходимость такого разделения по всем вариантам реализации, и следует понимать, что описываемые программные компоненты и системы могут в целом интегрироваться в единый программный продукт или входить во множество программных продуктов.
[058] На Фигуре 1 проиллюстрирован общий вид раскрываемой системы 100 контроля и обратной связи устройства для гигиены ротовой полости, которая включает в себя: устройство 1 для гигиены ротовой полости, оборудованное датчиками, базовую станцию 2 для приема и зарядки устройства 1 для гигиены ротовой полости, мобильное устройство 30, которое беспроводным способом принимает/отправляет данные, POA 8 специального беспроводного канала, сервер 4 и сеть 3 для передачи информации от сервера или между другими различными компонентами системы 100.
Связь для передачи данных
[059] Устройство 1 для гигиены ротовой полости может иметь антенну 5 и приемопередающие средства для радиосвязи с совместимой антенной-аналогом 5 и приемопередающими средствами базовой станции 2 по радиоканалу 31. Канал 31 радиосвязи может представлять собой, например, WiFi или GSM или Bluetooth или их производные или другие проприетарные протоколы. Кроме того, один или более оптических датчиков 9 могут осуществлять связь с мобильным телефоном 30, базовой станцией 2, сервером 4 или другим связанным вычислительным устройством, как раскрывается в настоящем документе.
[060] В другом варианте осуществления антенны и приемопередающие средства заменяются или дополняются проводными соединениями или соединителями для обеспечения возможности обмена информацией между устройством 1 для гигиены ротовой полости, оптическим датчиком 9 и/или базовой станцией 2. Проводные соединители могут также обеспечивать подачу электропитания от базовой станции устройству 1 для гигиены ротовой полости для перезарядки перезаряжаемого электрического источника питания последнего. В другом варианте осуществления подача электропитания от базовой станции устройству 1 для гигиены ротовой полости или оптическому датчику 9 обеспечивается посредством электромагнитной индукционной схемы.
[061] Питание базовой станции 2 может подаваться по шнуру питания. Альтернативно, питание базовой станции 2 может подаваться перезаряжаемой батареей, которая время от времени заряжается посредством зарядного устройства батареи, питаемого от электросети. Базовая станция 2 имеет приемное гнездо для физической поддержки и хранения зубной щетки, когда она не используется пользователем.
[062] Базовая станция 2 и/или отдельное оптическое устройство-датчик 9 включает в себя схему обмена данными для передачи данных по сети 3, например, интернету. Данные могут передаваться используя канал 31 радиосвязи, как проиллюстрировано на Фигуре 1, посредством антенны 5 базовой станции 2 и посредством антенны 5 специального оборудования 8 связи или POA, подключенного к сети 3. В других вариантах осуществления передача данных между базовой станцией 2 и сетью 3 выполняется по проводному каналу, например ADSL..
[063] Антенна 5 и приемопередающие средства устройства 1 для гигиены ротовой полости и/или камеры/оптического чувствительного устройства 9 также совместима со средствами радиосвязи мобильного устройства 30 по радиоканалу 31. Канал 31 радиосвязи представляет собой, например, WiFi или GSM или Bluetooth или их производные или другие подходящие протоколы. В некоторых вариантах осуществления радиоканалы 31 представляют собой каналы близкой, локальной радиосвязи или радиоканал 35, такие как используемые в сотовых или других системах мобильной телефонной связи (GSM и производные, например).
[064] Мобильное устройство 30 также способно, посредством своих схем радиосвязи, осуществлять обмен данными по радиоканалу 31 посредством специального оборудования 8 связи или POA по сети 3. Дополнительно или альтернативно, мобильное устройство 30 способно осуществлять обмен данными по радиоканалу 35 непосредственно по сети 3.
[065] Сервер 4 подключают к сети 3 любыми подходящими средствами. Серверу 4 дается широкое определение, согласно которому он включает в себя вычислительные устройства, способные осуществлять хранение и вычислительные операции, например, в «облаке» в вычислительной сети. Сервер 4 может включать в себя устройства хранения, например память, жесткие диски, флеш-память или другие устройства хранения и включает в себя вычислительные средства под управлением программы. Для передачи данных управляющая схема устройства для гигиены ротовой полости использует заданный адрес сервера 4 сети 3. Этот заданный адрес может изначально храниться в устройстве 1 для гигиены ротовой полости и/или может обновляться впоследствии по сети 3. Передача данных между устройством 1 для гигиены ротовой полости и сервером 4 может выполняться: a) каждый раз, когда устройство 1 для гигиены ротовой полости вновь размещается в базовой станции 2 в пакетной конфигурации, b) по указанию пользователя или сервера 4, например, посредством действия пользователя, инициирующего передачу посредством интерфейса мобильного устройства 30 или доступа веб-страницы к серверу 4, или c) в режиме реального времени, когда обнаруживается деятельность с устройством 1 для гигиены ротовой полости, или d) устройство 1 для гигиены ротовой полости снимается с базовой станции 2 или e) через другие подходящие интервалы.
Конструкция схем системы и архитектура сети
[066] Как проиллюстрировано на Фигуре 2, устройство 1 для гигиены ротовой полости может включать в себя датчик 10 давления и по меньшей мере один датчик 11 движения. Датчик 10 давления обнаруживает силу, прилагаемую на стороне чистки щеткой устройства 1 для гигиены ротовой полости, когда пользователь прикладывает щетинки к своим зубам. Может быть предусмотрен датчик 11 движения для обнаружения движения по любой или по всем трем ортогональным осям устройства 1 для гигиены ротовой полости, или датчик движения может быть способен обнаруживать ускорения или другие характеристики движения по всем трем осям. Сигналы, выводимые датчиками, обрабатываются посредством схем 12 формирования сигналов. Примеры формирования сигналов включают в себя: частотную фильтрацию и фильтрацию шума, усиление, преобразование, цифровую обработку сигналов и другие методы для оптимизации обнаруживаемых сигналов для анализа.
[067] В других вариантах осуществления устройство 1 для гигиены ротовой полости может не включать в себя никакой электроники и может представлять собой стандартную зубную щетку. В таких вариантах осуществления отдельный оптический датчик 9 может выполнять задачи отслеживания движения устройства 1 для гигиены ротовой полости.
[068] Обработанные сигналы или необработанные данные от датчиков затем сохраняются в памяти 14, как определено системой 13 управления, которая может представлять собой цифровой сигнальный процессор, микроконтроллер или другой процессорный компонент, и операции которого управляются программой 15. Память 14 может быть включена в устройство 1 для гигиены ротовой полости или в сервер 4 или другой компонент системы 100. Программа 15 может обновляться посредством интерфейсной схемы 16 устройства 1 для гигиены ротовой полости, модема для радиосвязи и его антенны 5 (и/или соединителя в случае контактного/проводного интерфейса) или других интерфейсов устройства 1 для гигиены ротовой полости. В более широком смысле интерфейсная схема 16 устройства для гигиены ротовой полости обеспечивает возможность обмена информацией между устройством 1 для гигиены ротовой полости, оптическим устройством-датчиком 9 и базовой станцией 2, когда радиоканал 31 установлен (и/или соединители зубной щетки и базовой станции состыкованы). Устройство 1 для гигиены ротовой полости может содержать схему подачи питания для питания датчиков и схем устройства 1 для гигиены ротовой полости, и она может включать в себя перезаряжаемый электрический источник 17 питания.
[069] Базовая станция 2 может включать в себя интерфейсную схему 20 базовой станции, модем для радиосвязи с антенной 5 (и/или соединителем) для обмена информацией по каналу 31. Кроме того, интерфейсная схема 20 базовой станции способна устанавливать канал 31 радиосвязи со специальным оборудованием 8 связи для связи с сетью 3. Базовая станция 2 может использовать преобразователь питания 22, который регулируется 21 для подачи надлежащего напряжения и тока схемам базовой станции. Могут быть предусмотрены электрические соединения (не проиллюстрированы) для подачи зарядного тока устройству 1 для гигиены ротовой полости от базовой станции 2. В некоторых вариантах осуществления базовая станция 2 может включать в себя схему перезарядки для перезарядки батареи или источника питания зубной щетки посредством индуктивной зарядки или прямого электрического соединения.
[070] Базовая станция 2, оптическое чувствительное устройство 9 или другое отдельное электронное устройство может также включать в себя передатчик 110 магнитного поля, который испускает магнитное поле, которое может регистрироваться связанным магнитометром или другим датчиком магнитного поля 11. Наличие передатчика 110 магнитного поля может обеспечиваться посредством использования зарядных схем или других схем, которые уже существуют в базовой станции 2 или другом электронном устройстве. Например, базовая станция 2 может иметь катушку перезарядки, которая также может служить в качестве передатчика 110 магнитного поля. Катушка перезарядки может быть зафиксирована и находиться в известной ориентации, с тем чтобы создавать магнитное поле известной напряженности и ориентации полярности. В некоторых вариантах осуществления базовая станция 2 может включать в себя катушку перезарядки, которая генерирует магнитное поле с полярными осями, расположенными в горизонтальной или вертикальной плоскости. В некоторых вариантах осуществления это может представлять собой одноосный передатчик 110 магнитного поля, такой как в случае с одноосной катушкой перезарядки. В других вариантах осуществления в базовую станцию 2 могут быть включены 2- или 3-осные передатчики 110 магнитного поля. Это преимущественно обеспечивает возможность реализации стационарного магнитного поля(-ей) известной ориентации, благодаря чему магнитометр 11 на устройстве 1 для гигиены ротовой полости может регистрировать напряженность и полярность магнитного поля(-ей) для предоставления информации, относящейся к положению и ориентации устройства 1 для гигиены ротовой полости или относительным изменениям положения и ориентации.
[071] В некоторых вариантах осуществления базовая станция 2 или другое электронное устройство, отдельное от устройства 1 для гигиены ротовой полости, может также включать в себя камеру 9, которая может обнаруживать визуальные шаблоны на устройстве 1 для гигиены ротовой полости. Камера 9 может представлять собой любую подходящую камеру, которая может обнаруживать визуальный шаблон на устройстве 1 для гигиены ротовой полости. Например, камеры, предусмотренные в мобильных телефонах, были бы подходящими. В других вариантах осуществления может использоваться автономная камера или оптическое чувствительное устройство 9, отдельный штатив камеры для мобильного телефона, подключенная зеркальная или другая камера или устройство обработки изображений.
[072] В некоторых вариантах осуществления базовая станция 2 является пассивной и ее схемы находятся под управлением контроллера 13 устройства 1 для гигиены ротовой полости, когда они осуществляют обмен данными друг с другом, в частности когда канал 31 относится к проводному/контактному типу с соединителями. В вариантах осуществления представленных на Фигуре 2, базовая станция имеет систему 19 управления, которая управляет ее операциями.
[073] Специальное оборудование 8 связи может включать в себя радиомодемную схему 27 и надлежащую электронику для связи с сетью 3. Специальное оборудование 8 связи также способно устанавливать канал 31 радиосвязи с базовой станцией 2 и/или канал 31 радиосвязи с мобильным устройством.
[074] Мобильное устройство 30 включает в себя по меньшей мере радиомодем 26 для установления канала 31 радиосвязи. Операции мобильного устройства 30 находятся под управлением системы 25 управления, например, центрального процессора или μC и программы 15. Мобильное устройство 30 включает в себя средства вывода, такие как экран дисплея, и средства ввода, такие как виртуальная или физическая клавиатура. Предпочтительно, средства ввода и вывода мобильного устройства 30 используются в системе для ввода информации и для отображения информации, в частности результатов вычислений, выполняемых сервером. Мобильное устройство 30 может также включать в себя камеру 9, которая способна обнаруживать визуальные шаблоны, предусмотренные на устройстве для гигиены ротовой полости для обнаружения перемещения.
[075] Программа вычислительных средств сервера 4 обеспечивает возможность хранения сигналов, принимаемых от устройства 1 для гигиены ротовой полости. Кроме того, сервер 4 может анализировать данные от датчиков для генерирования обратной связи и мотивационных данных, относящихся к результатам деятельности пользователя по чистке своих зубов. Эти результаты могут быть доступны пользователю на интернет-странице, размещенной на сервере 4 или переданной другому веб-серверу для размещения. В другом варианте осуществления предыдущие операции и вычисления выполняются полностью или частично в мобильном устройстве 30, при этом сервер 4 используется для общего контроля.
[076] Следует изначально понимать, что раскрываемое в настоящем документе изобретение может быть реализовано с любым типом аппаратного обеспечения и/или программного обеспечения и может представлять собой предварительно запрограммированное вычислительное устройство общего назначения. Например, система может быть реализована используя сервер, персональный компьютер, портативный компьютер, тонкий клиент или любое подходящее устройство или устройства. Изобретение и/или его компоненты могут представлять собой одно устройство в одном месте или множество устройств в одном или множестве мест, которые соединены друг с другом, используя любые подходящие протоколы связи посредством любой среды связи, такой как электрический кабель, волоконно-оптический кабель или беспроводным способом.
[077] Следует также отметить, что изобретение иллюстрируется и описывается в настоящем документе как имеющее множество модулей, которые выполняют определенные функции. Следует понимать, что эти модели лишь схематически проиллюстрированы на основе их функции исключительно для целей пояснения и не обязательно представляют конкретное аппаратное обеспечение или программное обеспечение. В этом отношении, эти модули могут представлять собой аппаратное обеспечение и/или программное обеспечение, реализованное, чтобы по существу выполнять определенные описываемые функции. Более того, в рамках изобретения модули могут комбинироваться или разделяться на дополнительные модули на основе определенной желаемой функции. Таким образом, описание не следует рассматривать как ограничивающее настоящее изобретение, но его следует понимать лишь как иллюстрирующее один пример его осуществления.
[078] Вычислительная система может включать в себя клиентов и серверы. Клиент и сервер в целом удалены друг от друга и обычно взаимодействуют посредством сети связи. Такие отношения клиента и сервера возникают благодаря компьютерным программам, выполняемым на соответствующих компьютерах и имеющих друг с другом клиент-серверные отношения. В некоторых вариантах реализации сервер передает данные (например, HMTL-страницу) устройству-клиенту (например, для целей отображения данных и получения входных данных пользователя от пользователя, взаимодействующего с устройством-клиентом). Данные, генерируемые на устройстве-клиенте, (например, результат взаимодействия с пользователем) могут приниматься от устройства-клиента на сервере.
[079] Варианты реализации объекта изобретения, описываемые в настоящем описании, могут быть реализованы в вычислительной системе, которая включает в себя внутренний компонент, например, сервер данных, или которая включает в себя компонент промежуточного слоя, например, сервер приложений, или которая включает в себя внешний компонент, например, компьютер-клиент, имеющий графический пользовательский интерфейс или веб-браузер, посредством которого пользователь может взаимодействовать с реализацией объекта изобретения, описываемого в настоящем описании, или любую комбинацию одного или более таких внутренних компонентов, компонентов промежуточного слоя или внешних компонентов. Компоненты системы могут быть взаимосоединены посредством любой формы или среды связи для цифровой передачи данных, например, сети связи. Примеры сетей связи включают в себя локальную сеть («LAN») и глобальную сеть («WAN»), объединенную сеть (например, Интернет) и одноранговые сети (например, динамические одноранговые сети).
[080] Варианты реализации объекта изобретения и операций, описываемых в настоящем описании, могут быть реализованы в цифровых электронных схемах или в компьютерном программном обеспечении, встроенном программном обеспечении или аппаратном обеспечении, включая структуры, раскрываемые в настоящем описании и их структурные эквиваленты, или в комбинациях одного или более из них. Варианты реализации объекта изобретения, описываемого в настоящем описании, могут быть реализованы в качестве одной или более компьютерных программ, т. е. одного или более модулей команд компьютерных программ, закодированных на компьютерной среде хранения для выполнения или управления работой устройства обработки данных. Альтернативно или дополнительно, программные команды могут кодироваться на искусственно генерируемом распространяемом сигнале, например, машиногенерируемом электрическом, оптическом или электромагнитном сигнале, который генерируется для кодирования информации для передачи подходящему устройству-приемнику для выполнения устройством обработки данных. Компьютерная среда хранения может представлять собой или быть включена в машиночитаемое устройство хранения, машиночитаемый носитель, массив памяти с произвольным или последовательным доступом или запоминающее устройство с произвольным или последовательным доступом, или сочетание одного или более из них. Более того, хотя компьютерная среда хранения не является распространяемым сигналом, компьютерная среда хранения может представлять собой источник или пункт назначения команд компьютерных программ, закодированных в искусственно генерируемом распространяемом сигнале. Компьютерная среда хранения может также представлять собой или быть включена в один или более отдельных физических компонентов или сред (например, множество CD, дисков или других устройств хранения).
[081] Операции, описываемые в настоящем описании, могут быть реализованы как операции, выполняемые посредством «устройства обработки данных» над данными, хранящимися на одном или более машиночитаемых устройств хранения или принимаемыми из других источников.
[082] Термин «устройство обработки данных» охватывает все виды устройств и машин для обработки данных, включая, например, программируемый процессор, компьютер, систему на микросхеме или множество или комбинации вышеприведенного. Устройство может включать в себя логическую схему специального назначения, например, FPGA (программируемую пользователем вентильную матрицу) или ASIC (специализированную интегральную схему). Устройство может также включать в себя, в дополнение к аппаратному оборудованию, код, который создает среду выполнения для рассматриваемой компьютерной программы, например, код, который представляет собой внутреннее программное обеспечение процессора, стек протокола, систему управления базами данных, операционную систему, кроссплатформенную среду выполнения, виртуальную машину или комбинацию одного или более из них. Устройство и среда выполнения могут реализовывать различные инфраструктуры различных моделей вычислений, такие как веб-службы, инфраструктуры распределенных вычислений и инфраструктуры распределенных вычислений типа «решетка».
[083] Компьютерная программа (также известная как программа, программное обеспечение, программное приложение, сценарий или код) может быть написана на любой форме языка программирования, включая компилируемые или интерпретируемые языки, декларативные или процедурные языки, и может быть развернута в любой форме, в том числе как автономная программа или модуль, компонент, подпрограмма или другая единица, подходящая для использования в вычислительной среде. Компьютерная программа может, но не обязательно, соответствовать файлу в файловой системе. Программа может храниться в части файла, который содержит другие программы или данные (например, один или более сценариев, хранящихся в документе языка разметки), в едином файле, предназначенном специально для рассматриваемой программы, или во множестве координированных файлов (например, файлов, в которых хранятся один или более модулей, подпрограмм или частей кода). Компьютерная программа может развертываться для выполнения на одном компьютере или на множестве компьютеров, находящихся в одном месте или распределенных по множеству мест и взаимосоединенных посредством сети связи.
[084] Процессы и логические потоки, описываемые в настоящем описании, могут выполняться одним или более программируемых процессоров, выполняющих одну или более компьютерных программ для выполнения действий посредством осуществления операций с входными данными или генерирования выходных. Процессы и логические потоки могут также выполняться посредством, а устройство может быть реализовано в качестве, логической схемы специального назначения, например, FPGA (программируемой пользователем вентильной матрицы) или ASIC (специализированной интегральной схемы).
[085] Процессоры, подходящие для выполнения компьютерной программы, включают в себя, например, микропроцессоры как общего, так и специального назначения, и любой один или более процессоров любого вида цифрового компьютера. Обычно, процессор будет принимать команды и данные от постоянного запоминающего устройства или памяти с произвольным доступом или от них обоих. Основными элементами компьютера являются процессор для выполнения действий в соответствии с командами и одно или более запоминающих устройств для хранения команд и данных. Обычно, компьютер будет также включать в себя или будет функционально связан для приема данных или передачи данных или и для того и для другого с одним или более запоминающих устройств большой емкости для хранения данных, например, магнитных, магнитооптических дисков или оптических дисков. Однако, компьютер не обязательно должен иметь такие устройства. Более того, компьютер может быть встроен в другое устройство, например, мобильный телефон, карманный персональный компьютер (КПК), мобильный аудио- или видеопроигрыватель, игровую приставку, приемник Системы глобального позиционирования (GPS) или портативное устройство хранения (например, флеш-накопитель универсальной последовательный шины (USB)), помимо прочего. Устройства, подходящие для хранения команд компьютерных программ и данных, включают в себя все формы энергонезависимой памяти, сред и запоминающих устройств, включающих в себя, например, полупроводниковые запоминающие устройства, например, СППЗУ, ЭСППЗУ и устройства флеш-памяти; магнитные диски, например, внутренние жесткие диски или съемные диски; магнитооптические диски; и компакт-диски и DVD-диски. Процессор и память могут дополняться или включаться в логическую схему специального назначения.
Устройство для гигиены ротовой полости. Конструкция устройства для гигиены ротовой полости
[086] Как проиллюстрировано на Фигуре 3, устройство 1 для гигиены ротовой полости может включать в себя рукоятку 40 и головку 42, которая может быть подсоединяема с возможностью снятия к рукоятке 40. Рукоятка 40 может содержать двигатель, который механически подсоединен к головке 42 и при активации вибрирует и перемещает головку 42 таким образом, который обеспечивает чистку зубов пользователя щеткой при размещении во рту. Рукоятка 40 включает в себя интерфейс 46 головки, который позволяет прикреплять с возможностью снятия различные головки 42 к рукоятке 40. Интерфейс 40 головки содержит контакты 48 для передачи как данных, так и питания различным головкам 42. Например, определенные головки 42 могут включать в себя датчики, которые требуют передачи питания и данных, и, следовательно, питание может направляться от источника питания рукоятки 40 головке 42 по контактам 48, которые образуют соединение с головкой 42 на интерфейсе 46 головки. Может присутствовать различное количество контактов 48, которые образуют соединение на интерфейсе 46 головки, например может быть два контакта 48 для питания и два контакта 48 для данных, три контакта 48 для питания, три контакта 48 для данных и другое различное количество контактов. В некоторых вариантах осуществления интерфейс 46 головки будет образовывать водонепроницаемое соединение с головкой 42 для предотвращения попадания воды в интерфейс и создания ею помех для электрических контактов 48 для передачи питания и данных.
[087] В некоторых вариантах осуществления большинство схем и дорогостоящих компонентов может содержаться внутри рукоятки 40, а не головки 42, которая может подлежать утилизации после определенного количества использований. Это минимизирует стоимость сменных головок 42. Например, в некоторых вариантах осуществления батарея, контроллер 13 может содержаться в рукоятке 40, а любые чувствительные элементы датчиков и схемы для подсоединения чувствительных элементов датчиков могут содержаться в головке 42. В других вариантах осуществления головка 42 может не содержать схем или электрических компонентов и будет только обеспечивать функцию механической чистки щеткой, выступая несущим элементом щетинок.
[088] В некоторых вариантах осуществления устройство 1 для гигиены ротовой полости может представлять собой лишь стандартную зубную щетку или другое стандартное устройство 1 для гигиены ротовой полости, которое является серийно выпускаемым, и может иметь только электронику для перемещения головки для содействия чистке щеткой. В некоторых вариантах осуществления устройство 1 для гигиены ротовой полости может включать в себя только шаблоны 120 или насадку 130 с шаблоном 120, и может не включать в себя никакой электроники, регистрирующей движение, или может вовсе не включать в себя никакой электроники. Соответственно, в этих вариантах осуществления для определения положения и ориентации устройства 1 для гигиены ротовой полости может использоваться программное обеспечение визуального отслеживания.
[089] Устройство 1 для гигиены ротовой полости может также включать в себя динамик 50 и различные визуальные индикаторы 52 для предоставления звуковой и визуальной обратной связи пользователю. Например, рукоятка 40 может содержать динамик 50 для воспроизведения музыки, существенной обратной связи, мотивационных фраз, оставшегося прошедшего времени, рекомендаций относительно давления при чистке щеткой, относительно того, были ли определенные квадранты очищены щеткой достаточным шаблоном, объявление о завершении чистки щетки и т. д. Кроме того, устройство 1 для гигиены ротовой полости может содержать любое количество визуальных индикаторов 52 для предоставления существенной обратной связи в отношении чистки щеткой, включающая в себя прошедшее время, светодиодный индикатор для индикации завершения чистки щеткой, предупредительные индикаторы для индикации ненадлежащей чистки щеткой, включающие в себя индикаторы для индикации того, каждому ли квадранту было уделено внимание. В других вариантах осуществления устройство 1 для гигиены ротовой полости может также использовать остеофонию для передачи звуковых сообщений пользователю.
[090] Как проиллюстрировано на Фигуре 6, устройство 1 для гигиены ротовой полости может содержать рукоятку 40 и головку 42, при этом одна из них или они обе могут включать в себя шаблон 120 для визуального обнаружения перемещения и ориентации посредством связанной камеры 9. Например, в некоторых вариантах осуществления задняя часть головки 42 может содержать шаблон (т. е. «AB» с окружностью и линией, как проиллюстрировано). В других вариантах осуществления шаблон 120 может содержаться на насадке 130, которая может прикрепляться к головке или на шейку, будучи нанесенной краской на щетинки, или в других положениях.
[091] Рукоятка 40 может также включать в себя шаблон 120 или, в некоторых вариантах осуществления может быть единственным компонентом, который включает в себя шаблон 120. Шаблон 120 на рукоятке 40 может наноситься непосредственно на рукоятку 40 или может находиться в насадке 130, которая зажимается или подсоединяется к концу рукоятки 40. Шаблон 120 может быть расположен в удобном месте на насадке 130 или на рукоятке 40, с тем чтобы он мог быть обнаружен под всеми углами нормальной деятельности по чистке щеткой. В некоторых вариантах осуществления рукоятка 40 может включать в себя множество шаблонов 120 разного размера для обнаружения различных ориентаций. Например, в некоторых вариантах осуществления насадка 130 может быть квадратной или круглой и иметь различный шаблон 120 на каждой стороне, чтобы система обнаруживала ориентацию устройства для гигиены ротовой полости относительно камеры.
[092] Насадка 130 может быть утяжелена таким образом, чтобы устройство 1 для гигиены ротовой полости стояло само, будучи поставленным на плоскую поверхность. Например, нижней части насадки 130 может быть придан вес, достаточно тяжелый 130 для того, чтобы удерживать устройство 1 для гигиены ротовой полости в вертикальном положении. В некоторых вариантах осуществления это может быть особенно полезно, если насадка 130 является сферической в нижней части. Это придаст устройству для гигиены ротовой полости развлекательное качество, которое будет интригующим для детей и даже взрослых.
[093] Шаблон 120 может наноситься используя краску, другие маркировочные процессы, или он может использовать отражающие покрытия, зеркала или флуоресцентные покрытия. В некоторых вариантах осуществления шаблон 120 может использовать цвет, или он может быть выполнен в оттенках серого.
Устройство для гигиены ротовой полости без шаблона или электроники
[094] Стандартное устройство 1 для гигиены ротовой полости или устройство для гигиены ротовой полости может использоваться без какой-либо электроники или шаблонов. Как указано, в некоторых вариантах осуществления положение и движение устройства 1 для гигиены ротовой полости будет обнаруживаться.
Датчики
[095] Устройство 1 для гигиены ротовой полости или отдельные электронные устройства (например, оптические датчики) могут включать в себя различные датчики, которые обнаруживают определенные характеристики чистки щеткой, которые могут анализироваться для предоставления различной обратной связи и другой мотивационной информации пользователю. Например, один или более оптических датчиков 9 могут также использоваться на отдельном электронном устройстве для обнаружения ориентации и перемещения устройства 1 для гигиены ротовой полости. Например, оптические датчики 9 могут использоваться для захвата изображений устройства 1 для гигиены ротовой полости, и изображения могут отправляться для обработки для идентификации его границ, формы, продольной оси и ориентации (например, путем идентификации его щетинок). В некоторых вариантах осуществления оптический датчик(-и) 9 может использоваться/может обнаруживать шаблоны на устройстве 1 для гигиены ротовой полости, а не само устройство 1 для гигиены ротовой полости. Оптический датчик(-и) 9, используемый для обнаружения структур может быть сориентирован в таком направлении, чтобы обеспечивать линию прямой видимости до шаблона 120 на устройстве 1 для гигиены ротовой полости, который может находиться на головке 42, рукоятке 40 или насадке 130.
[096] В качестве другого примера, устройство 1 для гигиены ротовой полости может включать в себя различные датчики 11 движения для определения качества чистки щеткой в отношении определенных квадрантов рта или даже отдельных зубов. Датчики 11 движения могут включать в себя гироскопы, акселерометры, магнитометры, гирометры и другие различные датчики, способные обнаруживать положения, перемещение и ускорение. Эти различные датчики 11 движения могут быть включены либо в рукоятку 40, либо в головку 42. Однако, может быть полезно поместить датчик 11 движения в рукоятку 40 в вариантах осуществления в которых рукоятка 42 и, следовательно, любой датчик ускорения или другой датчик движения испытывал бы много дополнительного движения, которое может обеспечивать обнаружение положения. В некоторых вариантах осуществления магнитометр будет регистрировать вектор(-ы) магнитного поля земли. В некоторых вариантах осуществления будет использоваться трехосный магнитометр, а в других будет использоваться двух- или одноосный магнитометр.
[097] Кроме того, может использоваться генератор 110 магнитного поля для генерирования известного магнитного поля с известной полярностью, которую может регистрировать магнитометр, включенный в устройство 1 для гигиены ротовой полости. Внутрь базовой станции 2, которая уже имела бы катушку перезарядки и/или интерфейсную схему 20, которая может использоваться для генерирования обнаруживаемого магнитного поля, может быть помещен передатчик 110 магнитного поля. В других вариантах осуществления передатчик 110 магнитного поля может представлять собой отдельный электронный компонент в базовой станции 2 или в полностью отдельном физическом компоненте. В некоторых вариантах осуществления передатчик 110 магнитного поля находился бы в стационарном блоке с известной ориентацией.
[098] Устройство 1 для гигиены ротовой полости может также включать в себя различные бесконтактные датчики, которые обнаруживают близость устройства 1 для гигиены ротовой полости ко рту пользователя. Они могут быть включены в головку 42 или в рукоятку 40. Бесконтактные датчики могут использоваться для получения дополнительной информации о положении, относящейся к определению качества чистки щеткой пользователя.
[099] Кроме того, устройство 1 для гигиены ротовой полости может содержать датчик 10 давления для определения того, прилагает ли пользователь надлежащее давление при чистке своих зубов щеткой. Датчик 10 давления может быть включен в головку 42, которая может быть более гибкой или использовать простые измерительные преобразователи давления или другие компоненты, способные измерять давление.
[0100] В некоторых вариантах осуществления различные головки 42 могут включать в себя камеру 56, которая будет обнаруживать различные аспекты качества зубов, которые могут относиться или не относиться к качеству чистки щеткой. Например, камера 56, включающая в себя камеру 56 для ближней инфракрасной области спектра, может быть способна использоваться на устройстве 1 для гигиены ротовой полости для сбора данных, указывающих на деминерализацию или кариес зубов или разрушение зубов. Например, устройство 1 для гигиены ротовой полости может использовать определенные длины волн, которые особенно подходят для обнаружения этих отклонений от нормы, например в диапазоне 1300-1400 нм. В некоторых вариантах осуществления устройство 1 для гигиены ротовой полости может также содержать источник 58 света, который будет фокусироваться в направлении зубов в ходе чистки щеткой и может использоваться камерой для обнаружения определенных отклонений от нормы.
[0101] Определенные камеры 56 и потенциально источники 58 света могут также быть реализованы для обнаружения уровней налета на зубах и изменений в уровнях налета в ходе чистки щеткой. В определенных вариантах осуществления источники 58 инфракрасного света или света в ближней инфракрасной области спектра и соответствующая камера 56, которая обнаруживает и записывает свет в этом диапазоне длин волн, могут потенциально обеспечить возможность обнаружения налета.
Программа для анализа чистки щеткой и обратной связи
[0102] Различные датчики и оптические датчики системы могут собирать данные, относящиеся к качеству чистки щеткой пользователем или общему состоянию зубов пользователя. Эти данные могут затем обрабатываться используя программы или приложения, установленные в различных частях системы 100 контроля устройства для гигиены ротовой полости. Соответственно, как описано выше, данные от датчиков и оптических датчиков могут обрабатываться программой, выполняемой системой 13 управления устройства 1 для гигиены ротовой полости или, альтернативно, процессором на мобильном устройстве 30, другим связанным вычислительным устройством или сервером 4. Результатом обработки и анализа данных системой 100 будут выходные данные, представляющие собой обратную связь, относящуюся к качеству чистки щеткой пользователем. Эта обратная связь может передаваться посредством звуковой обратной связи посредством динамика 50 устройства 1 для гигиены ротовой полости, визуально на индикаторах 52 устройства 1 для гигиены ротовой полости или как на связанном мобильном устройстве 30, так и при доступе на веб-сайте, размещенном или поддерживающим связь с сервером 4.
[0103] На Фигуре 4 проиллюстрирован пример процесса, посредством которого устройство 1 для гигиены ротовой полости оценивает качество чистки щеткой конкретного пользователя. В конкретном варианте осуществления может не требоваться каждый из этапов, но различные комбинации этих этапов могут быть реализованы в системе 100 контроля устройства для гигиены ротовой полости. Сначала, пользователь может ввести профиль 70 пользователя в систему 100 контроля устройства для гигиены ротовой полости, чтобы обеспечить пользователю возможность калибровки устройства 72 гигиены ротовой полости. В некоторых вариантах осуществления устройство 1 для гигиены ротовой полости может калиброваться на заводе, пользователем либо и тем и другим. После калибровки, пользователь может взять устройство 1 для гигиены ротовой полости и начать чистить зубы. Устройство для гигиены ротовой полости или связанные с ним устройства контроля (например, камера) затем определили бы, что чистка щеткой инициирована 74, и запустили бы запись данных 76 датчиков в ходе чистки щеткой. Затем система 100 контроля устройства для гигиены ротовой полости может анализировать данные 78 датчиков для вывода обратной связи 80 о качестве чистки щеткой пользователю.
Профиль пользователя
[0104] Соответственно, профиль 60 пользователя может вводиться 70 для каждого конкретного пользователя определенного устройства 1 для гигиены ротовой полости или быть связанным с конкретной учетной записью, хранящейся на сервере 4, внутри устройства для гигиены ротовой полости, базовой станции или других вычислительных устройств. По инициализации для нового устройства для гигиены ротовой полости или новой учетной записи на сервере 4, пользователь может ввести свою информацию, которая может использоваться для определения оптимального времени и характеристик чистки щеткой. Например, программа 15 может сначала запросить имя, пол, рост, массу, возраст пользователя и задать определенные вопросы по его стоматологическому анамнезу. Профиль 60 пользователя может затем быть связан с определенными данными, записываемыми в ходе использования устройства для гигиены ротовой полости пользователем, включая калибровочные данные, которые относятся к определенным устройствам 1 для гигиены ротовой полости, связанным оптическим датчикам 9 или являются общими и могут применяться для любого устройства 1 для гигиены ротовой полости или оптическим датчикам 9, подключенным к системе 100. В некоторых вариантах осуществления пользователь может выгружать свое фото, или может инициироваться программа, которая использует оптический датчик(-и) 9 для захвата фото пользователя с расстояния, на котором пользователь обычно чистил бы зубы.
[0105]
Обнаружение использования
[0106] Система 100 контроля чистки зубов щеткой может также определять, имело ли место использование, и количество использований в день. В некоторых вариантах осуществления устройство 1 для гигиены ротовой полости и/или система обнаружения оптических датчиков обнаруживает данные движения посредством датчиков 11 движения и/или оптических датчиков 9 и анализирует данные для определения того, происходило ли использование, или того, перемещалась ли щетка или использование симулировано.
[0107] При обнаружении движения, указывающего на использование, устройство 1 для гигиены ротовой полости или оптическое устройство-датчик 9 может сохранять данные положения и движения в своей памяти 14 для последующего анализа. Например, это предотвратит запись ложноположительных данных, например, когда пользователь перемещает щетку в шкафчике для лекарств, или когда дети обманывают систему путем непродолжительного встряхивания зубной щетки.
[0108] Например, перемещение, указывающее на движение, может быть связано с определенным уровнем ускорения и/или частотой, которая характерна для определенного пользователя. В других вариантах осуществления пользователь может нажать кнопку или переключатель на устройстве 1 для гигиены ротовой полости, базовой станции 2 или устройстве с оптическим датчиком 9, чтобы активизировать датчики на устройстве, которые затем начнут запись данных. Соответственно, система определит, когда инициируется чистка щеткой 74. В некоторых вариантах осуществления это будет выполняться автоматически, например, по обнаружении определенных ускорений и частот. Соответственно, как только пользователь берет зубную щетку, датчики 11 движения могут начать запись данных 76 и их отправку любой из различных систем 13 управления в системе 100 для их анализа 78 на предмет характеристик, связанных с чисткой щеткой.
[0109] Например, устройство 1 для гигиены ротовой полости будет обычно располагаться на своей базе 2, будучи обращенным вверх, перед использованием, в ориентации, которая не была бы подходящей для чистки щеткой пользователем, держащим устройство 1 для гигиены ротовой полости. Соответственно, как только пользователь берет устройство 1 для гигиены ротовой полости, устройство 1 для гигиены ротовой полости будет в целом поворачиваться приблизительно на 45 градусов, чтобы удерживаться главным образом в горизонтальном положении в ходе чистки щеткой. Соответственно, одним пороговым критерием для определения того, что чистка щеткой инициирована 74, было бы то, наклонено ли устройство 1 для гигиены ротовой полости в определенном диапазоне углов, указывающем, что устройство 1 для гигиены ротовой полости находится в горизонтальном или близком к горизонтальному положении. Это может быть диапазон углов, составляющий 20 градусов, 5 градусов, 10 градусов, или другие подходящие диапазоны. Кроме того, ряд калибровочных сеансов может указать подходящий диапазон. Конечно, это можно было бы обнаруживать посредством оптических датчиков 9 и/иди датчиков 11 движения.
[0110] В некоторых вариантах осуществления пользователь может включить устройство, и оптический датчик 9 может начать запись. Затем система может определять, когда шаблон 120 находится на определенной высоте, указывающей, что он находится близко ко рту пользователя. Это может комбинироваться с информацией об ускорении, обнаруживаемой оптическим датчиком(-ами) 9 и анализируемой, как указано выше для датчиков 11 движения.
[0111] В других вариантах осуществления определение того, инициирована ли чистка щеткой 74 и прекратилась ли она, может выполняться системой 100 посредством статистического анализа данных движения от датчиков 11 движения и/или оптических датчиков 9. Этот статистический анализ может выполняться путем коррелирования данных от датчиков 11 движения и/или оптических датчиков 9 с предыдущими данными чистки зубов щеткой или калибровочными данными, или данными, сохраненными от других пользователей. Например, после выполнения анализа, может быть определен определенный порог корреляции данных движения с ранее записанными калибровочными данными, которые связанны с использованием, который указывает, что чистка щеткой инициирована 74 или выполняется. Соответственно, когда пользователь начинает чистку щеткой, система 100 может записывать, что использование инициировано 74, и записывать данные 76 в память 14, пока не прекратится использование, как данные чистки щеткой, например, после падения корреляции ниже определенного порога.
[0112] Например, используя конфигурацию системы оптического датчика 9, оптический датчик 9 может выводить данные, которые включают в себя изображения устройства для гигиены ротовой полости (например, зубной щетки или ирригатора) и пользователя. Данные могут отправляться различным системам управления для обработки и анализа на движение. Например, алгоритмы обработки изображений могут сначала определять граничное состояние для идентификации границ губ/рта пользователя, зубов, головы, устройства для гигиены ротовой полости, рукоятки, головки, щетинок, ирригатора и т. д.
[0113] Можно использовать идентификацию границ характерных черт человека посредством стандартных алгоритмов идентификации границ, которые обычно могут использовать пороговые изменения в определенных цветах (световых частотах). После идентификации границ устройства 1 для гигиены ротовой полости, можно было бы идентифицировать продольную ось и потенциально ориентацию щетинок (если это зубная щетка) для определения угловой ориентации вокруг продольной оси. Это позволит системе определить общую ориентацию и движение зубной щетки, с кадрами с меткой времени от устройства обработки изображений.
[0114] Затем, зубная щетка может идентифицироваться как расположенная на определенной стороне рта посредством анализа относительных положений зубной щетки и черт рта. Кроме того, ориентация зубной щетки относительно стороны рта, на которой она находится, может использоваться для определения того, для какой секции или участка зубов пользователя осуществляется чистка щеткой или чистка межзубных промежутков водой. Например, если ведется чистка щеткой нижней части верхних моляров с правой стороны, то визуальная система определила бы, что зубная щетка находится на правой стороне рта со щетинками обращенными вверх.
[0115] Кроме того, после определения очертаний и ориентации зубной щетки 1 на каждом кадре, для определения движения зубной щетки могут использоваться временные метки каждого кадра. Например, изменение в положениях, (время и расстояние) может использоваться для расчета скорости и ускорения изменений. Соответственно, как и в случае с датчиками 11 движения, данные изображений могут использоваться для определения движения устройства для гигиены ротовой полости. Соответственно, такое движение может использоваться для определения соблюдения стандартов чистки щеткой и других стандартов гигиены ротовой полости, как раскрывается далее в настоящем документе.
[0116] Анализ данных движения (полученных посредством обработки от датчиков 11 движения или посредством обработки данных изображений от оптических датчиков 9) может использовать анализ характерных или отличительных признаков, который сравнивает только относительные перемещения. Отличительный признак может определяться на основе ускорения по определенным осям (обнаруживаемого посредством датчиков 11 движения, данных изображений с временной меткой или иными способами), так как движение чистки зубов щеткой в целом выполняется относительно быстрым движением, которое не характерно ни для какого другого случайного перемещения устройства 1 для гигиены ротовой полости, например, чтобы поставить его назад в шкафчик. Кроме того, может осуществляться контроль частоты чистки щеткой, так как чистка щеткой в целом представляет собой быстрое периодическое движение, и, следовательно, могут применяться различные полосовые частотные фильтры, фильтры низких частот и Калмана или другие методы для идентификации определенных представляющих интерес частот и амплитуд для таких частот, которые указывают на чистку щеткой.
[0117] Эти амплитуды частот могут представлять собой определенные частоты, которые достигают пороговой амплитуды, которые связаны или определены как указывающие на то, что пользователь осуществляет чистку щеткой. Например, для того чтобы система 100 определила, что чистка щеткой инициирована 74, могут требоваться определенные частоты по горизонтальной или вертикальной осям, или для того чтобы система определила, что чистка щеткой инициирована 74, могут требоваться определенные периодические ускорения, которые достигают определенных порогов. В некоторых вариантах осуществления это может быть частотой, составляющей 1-5 Гц. После того как данные, анализируемые контроллером 13, падают ниже определенного порога, который указывает на использование, система 100 может прекратить запись данных или определить, что чистка щеткой прекратилась.
[0118] В дополнение к статистическому анализу, система может обнаруживать перемещение, указывающее на движение или фактическую чистку щеткой, посредством использования фильтрации и порогового анализа. Например, система 100 может сначала выполнять фильтрацию данных от датчиков 11 движения, с тем чтобы проходили частоты только в определенной полосе (так как чистка щеткой является периодической), и вести контроль таких частот, чтобы обнаруживать, когда хотя бы один сигнал в ней достигает порога в по меньшей мере определенном количестве циклов или на протяжении по меньшей мере определенного периода времени, чтобы определять, что пользователь осуществляет чистку щеткой. Например, если пользователь чистит щеткой зубы в среднем при частоте 1-5 Гц (или потенциально меньше в случае со зубной щеткой с двигателем), может быть реализован полосовой фильтр 1-5 Гц.
[0119] Таким образом, когда система 100 обнаруживает, что амплитуда полосы частот в диапазоне 1-5 Гц достигает порога, указывающего на использование, контроллер 13 может начать записывать данные от датчиков в память 14 на протяжении периода времени, в течение которого данные движения указывают на то, что устройство 1 для гигиены ротовой полости используется. Кроме того, периодические ускорения по определенным осям или угловые ускорения (для круговой чистки щеткой), которые достигают определенных пороговых амплитуд, могут также использоваться для указания на то, что чистка щеткой инициирована. На анализ данных может также влиять то, включает ли в себя устройство 1 для гигиены ротовой полости электронный двигатель для вызова вибрации головки для содействия чистке щеткой. В таких вариантах осуществления данные могут фильтроваться для устранения высокочастотного ускорения и другого шума, создаваемого электронным двигателем.
[0120] В некоторых вариантах осуществления может определяться качество чистки щеткой на основе типа перемещений, который выполняет пользователь, используя устройство 1 для гигиены ротовой полости. Зубные врачи указали, что определенные перемещения более преимущественны для чистки щеткой, включая круговые перемещения, как в движениях по часовой стрелке, так и в движениях против часовой стрелки, движения от верхушки к корню и движения слева направо.
[0121] Система 100 может определять, выполняются ли эти движения, относительное количество этих движений посредством фильтрации данных от датчиков 11 движения или оптических датчиков 9 по определенным осям, которые указывают на каждое движение. Например, данные от датчиков 11 движения или оптических датчиков 9 могут фильтроваться по оси, горизонтальной относительно силы притяжения, и система 13 управления или другие процессоры системы 100 могут обрабатывать данные для определения того, достигло ли ускорение, частота или другие данные движения достаточно значительной амплитуды в определенном направлении, указывающей на такое конкретное движение.
[0122] В случае с данными изображений, в дополнение к обнаружению порогов ускорения или скорости, которые указывают на чистку щеткой, оптическая система может обнаруживать пребывание устройства 1 для гигиены ротовой полости в пределах определенного расстояния от рта пользователя или внутри рта пользователя для определения того, что чистка щеткой инициирована. Например, если возможно идентифицировать головку, когда головка находится внутри области, определенной как находящаяся внутри рта пользователя, система может определять, что пользователь чистит зубы, достаточно надежно.
[0123] В других примерах, для определения того, используются ли возвратно-поступательные движения или круговые движения, может использоваться только ускорение. В других вариантах осуществления могут интегрироваться данные ускорения от датчиков 11 движения для определения фактического перемещения устройства 1 для гигиены ротовой полости для оценки типа используемых ходов щетки. На анализ данных может также влиять то, включает ли в себя устройство 1 для гигиены ротовой полости электронный двигатель для вызова вибрации головки для содействия чистке щеткой. В таких вариантах осуществления данные могут фильтроваться для устранения высокочастотного ускорения и другого шума, создаваемого электронным двигателем.
[0124] В некоторых вариантах осуществления в устройство 1 для гигиены ротовой полости может быть включен электронный двигатель для вибрации головки 42. В таких вариантах осуществления данные движения, записываемые датчиками, относящиеся к перемещениям при чистке щеткой, имели бы меньшую амплитуду, чем для ручной щетки 1. Это обусловлено тем, что пользователи ручных зубных щеток, без содействия электронного двигателя и подвижной головки 42, будут чистить щеткой зубы более энергичными движениями. Соответственно, алгоритмы, используемые для анализа данных движения для обнаружения использования, движения и местоположения устройства для гигиены ротовой полости, будут модифицироваться таким образом, чтобы учитывать более низкие амплитуды и/или другие движения, и включать в себя фильтрацию высокочастотного шума двигателя. Соответственно, в некоторых вариантах осуществления пороги, заданные для амплитуды, требуемой для обнаружения или индикации хода щетки, были бы ниже, так как пользователь, использующий электронное устройство для гигиены ротовой полости, в целом перемещает щетку в более медленном темпе и совершает более прямолинейные перемещения.
[0125] Кроме того, датчик 10 давления также может использоваться для определения того, действительно ли выполняется чистка щеткой, или в комбинации с данными движения, упомянутыми выше. Например, пользователь может перемещать устройство 1 для гигиены ротовой полости, но не прижимать его к зубам. Следовательно, соответственно, требование как о движении определенной частоты, амплитуды или характерных особенностей, так и об определенном давлении устранит многие ложноположительные данные, вызванные случайным перемещением или давлением щетки, которое отсутствует при чистке щеткой. Соответственно, датчик 10 давления может выводить сигнал, который анализируется 78 контроллером 28 для определения давления, прилагаемого к зубам. Если давление превышает определенный предел, система 100 может указать или определить, что пользователь, вероятно, осуществляет чистку щеткой. Этот анализ может выполняться посредством статистического анализа, порогового анализа или другими подходящими методами расчета для определения вероятности чистки щеткой на основе количества и/или устойчивого характера давления, записываемого датчиком 10 давления.
Средство контроля использования для сменных головок
[0126] Кроме того, для контроля срока полезной службы одной головки 42 устройства 1 для гигиены ротовой полости, может обнаруживаться и сохраняться в памяти 13 устройства 1 для гигиены ротовой полости или связываться с сервером 4 общее количество использований для сменной головки 42 устройства 1 для гигиены ротовой полости. Таким образом, система 100 может предоставлять уведомление пользователю, например, на его мобильном устройстве 30 или через интерфейс веб-страницы серверу 4, после того как определенная головка 42 устройства 1 для гигиены ротовой полости была использована определенное количество раз или на протяжении определенного периода времени. Когда головка 42 отработана, пользователь отсоединит и вновь подсоединит новую головку 42, что будет интерпретировано и записано системой 100 как прикрепление нового устройства 1 для гигиены ротовой полости. Кроме того, каждая головка 42 может включать в себя уникальный идентификационный модуль 62, который хранит идентификатор для этой конкретной головки 42, поэтому когда эта же головка 42 прикрепляется вновь, например, для чистки или других целей, система 100 не будет предполагать, что прикреплена новая головка 42.
Время и положение чистки щеткой
[0127] Далее, данные чистки щеткой, записанные выше, могут анализироваться 78 для предоставления обратной связи по качеству чистки щеткой 80 в контексте положения и времени. Она может представляться после завершения чистки щеткой или в режиме реального времени для предоставления мгновенной обратной связи пользователю. Например, датчики 11 движения и/или оптические датчики 9 обнаруживают информацию о положении устройства 1 для гигиены ротовой полости. Используя данные акселерометра и гирометра, визуально обнаруженные данные от оптических датчиков 9 и шаблонов 120 или других датчиков 11 движения, может быть определено положение, ориентация и перемещение устройства 1 для гигиены ротовой полости и экстраполировано для расчета относительного позиционного перемещения головки 42. Например, если известны расстояние, ориентация и направление датчиков 11 движения к щетинковой части головки 42, система 11 сможет определить положение головки 42 и ее относительное движение, ориентацию и зону покрытия на основе относительного движения датчиков 11 движения.
[0128] Это может быть рассчитано посредством первоначального расчета эталонных координат по обнаружении движения устройством 1 для гигиены ротовой полости и записи относительного перемещения относительно начальной координаты (координат) для определения отличительного признака чистки щетки. Это может выполняться посредством расчета перемещения 42 посредством расчета изменений в ориентации щетки и перемещения вследствие ускорения, записанного гирометром или акселерометром, или визуально обнаруженного оптическими датчиками 9. Эти расчет могут выполняться системой 13 управления или другими процессорами, которые используются в системе 100, включающими в себя процессор мобильного телефона, выполняющий приложение на мобильном телефоне, или процессор(-ы) на сервере, на котором запущено программное обеспечение для анализа данных.
Время и положение чистки щеткой - магнитометр
[0129] В некоторых вариантах осуществления датчик-магнитометр 11 может предоставлять дополнительную информацию о положении посредством обнаружения полярности, вектора направления и напряженности магнитного поля земли и/или магнитного поля, генерируемого передатчиком 110 магнитного поля. В некоторых вариантах осуществления он может представлять собой передатчик 110 магнитного поля, расположенный в базовой станции 2, так как базовая станция 2 является стационарной, и передатчик 110 магнитного поля имел бы известную полярность и направление (например, горизонтальное или вертикальное и в определенном направлении). Это может обнаруживаться магнитометром 11, расположенным в устройстве 1 для гигиены ротовой полости. Соответственно, напряженность магнитного поля, обнаруживаемого датчиком-магнитометром 11, даст оценочное значение расстояния, на котором находится устройство 1 для гигиены ротовой полости от базовой станции 2 вдоль сферы или овальной кривой или яйцевидной кривой, представляющей силовые линии магнитного поля, окружающие базовую станцию 2 или связанное устройство.
[0130] Кроме того, магнитометр сможет зарегистрировать направление вектора магнитного пола вдоль силовых линий магнитного поля. В других вариантах осуществления расстояние, на котором устройство 1 для гигиены ротовой полости находится от базовой станции 2, может быть рассчитано используя: ориентацию магнитного поля, обнаруживаемую датчиком-магнитометром 11, испускаемого передатчиком 110 магнитного поля, вместе с информацией об угловом положении акселерометра и гирометра. Возможно использовать знание формы магнитного поля и его векторов на определенных расстояниях от передатчика и его полярности. Например, наклон магнитного поля относительно силы притяжения будет меняться предсказуемым образом на различных расстояниях от передатчика магнитного поля, например. Кроме того, посредством сравнения вектора силы притяжения с вектором магнитного поля, угол можно использовать для расчета высоты вдоль яйцевидного контура или силовых линий магнитного поля. Это обусловлено тем, что угол поля относительно силы притяжения будет разным на каждой высоте, так как яйцевидный контур будет направлен под разным углом относительно силы притяжения на каждой высоте. Это будет особенно справедливо, когда северный и южный полюсы сориентированы в вертикальном направлении, при котором силовые линии магнитного поля имеют компоненты, которые меняются от горизонтальных вблизи нижней и верхней части яйцевидного контура к вертикальным приблизительно на высоте передатчика.
[0131] Соответственно, данные магнитометра в сочетании с данными акселерометра и/или оптическими данными могут использоваться для определения положения устройства 1 для гигиены ротовой полости в пределах кольца, которое расположено в горизонтальной плоскости, которое обладает равной напряженностью магнитного поля вокруг передатчика 110. Например, на Фигуре 5 проиллюстрирован вариант осуществления базы 2 с однокатушечным передатчиком 110 магнитного поля, который генерирует яйцевидные контуры, которые имеют сечения с векторами B (магнитного) поля, которые меняют направления в вертикальной плоскости. Датчики 11 на устройстве 1 для гигиены ротовой полости могут включать в себя датчик 11 магнитного поля для обнаружения магнитного поля, генерируемого передатчиками 110 магнитного поля, и акселерометр 11 для обнаружения, помимо других ускорений, ускорения силы притяжения ag. Соответственно, магнитометр 11 на устройстве 1 для гигиены ротовой полости может быть расположен с полем B, генерируемым передатчиком 110. Соответственно, напряженность и направление магнитного поля (Bt) могут быть определены посредством магнитометра 11. Одновременно, акселерометр 11 может обнаруживать ускорение от силы притяжения как вектор ag. Система 100 может анализировать данные и определять Q° между вектором силы притяжения ag и вектором магнитного поля Bt.
[0132] Угол Q° может затем использоваться для определения кольца R, в котором известно нахождение устройства 1 для гигиены ротовой полости в некоторой точке вдоль кольца R. Например, сначала напряженность магнитного поля B, обнаруженная магнитометром 11, может использоваться для определения того, на каком яйцевидном или тороидальном контуре магнитного поля находится устройство для гигиены ротовой полости (например, B1, B2 или B3). Это сведет положение устройства 1 для гигиены ротовой полости к пространству внутри яйцевидного или тороидального контура, окружающего передатчик 110. Далее, Q°может использоваться для расчета вертикального положения на яйцевидном или тороидальном контуре и, следовательно, сведения положения к кольцу R, окружающему передатчик 110. Соответственно, если система 100 обнаруживает перемещение к новому кольцу R, система будет иметь информацию о возможном направлении и пройденных расстояниях. Это информация будет дополнена данными акселерометра, что предоставит дальнейшую информацию о направлении движения. Это, например, может предоставить определенные верхние или нижние границы направления и/или расстояния, пройденного устройством 1 для гигиены ротовой полости. Таким образом, система 100 и техника обработки данных может использоваться для предоставления относительного положения и информации о перемещении устройства 1 для гигиены ротовой полости и применяться для определения положения чистки зубов щеткой во рту, как описано в настоящем документе.
[0133] В некоторых вариантах осуществления датчик-магнитометр 11 может регистрировать магнитное поле, передаваемое передатчиком 110 магнитного поля. Для этого, данные магнитного поля должны быть отфильтрованы от внешнего шума и особенно от магнитного поля земли. Магнитное поле земли будет обладать относительно постоянной напряженностью и направлением в заданном месте на шкале перемещения зубной щетки. Кроме того, магнитное поле земли довольно большое и большинство магнитометров откалиброваны в соответствии с магнитным полем земли. Соответственно, для использования магнитометра, откалиброванного для магнитного поля земли, например, в вариантах осуществления в которых обнаруживается как магнитное поле земли, так и передатчиков 110 для расчета изменений положения и ориентации, необходимо использовать определенные алгоритмы фильтрации для их различения. В некоторых вариантах осуществления критические данные, которые могут использоваться для их фильтрации, заключаются в том, что магнитное поле земли остается относительно постоянным на шкале перемещения устройства для гигиены ротовой полости по сравнению с изменением в обнаруживаемом магнитном поле, которое передается передатчиком 110 магнитного поля. Следовательно, для различения двух магнитных полей могут применяться временные фильтры. В некоторых вариантах осуществления магнитное поле, передаваемое передатчиком 110 может передаваться импульсами при определенной частоте или амплитуде, чтобы легко отфильтровываться, используя обработку сигналов и анализ данных.
[0134] В некоторых вариантах осуществления компонент направления магнитного поля выходных векторных данных от магнитометра 11 также может анализироваться для расчета относительного изменения положения и/или ориентации. Например, в некоторых вариантах осуществления передатчик 110 может передавать магнитное поле с ориентацией векторов, проиллюстрированной на Фигуре 5. Информация о направлении или векторах, обнаруживаемая магнитометром исходя из магнитного поля B, создаваемого передатчиком 110, может быть полезной для предоставления информации об ориентации и/или относительном положении. Эти данные могут затем комбинироваться с данными из информации о направлении векторов, обнаруживаемое исходя из магнитного поля земли, которая, вероятно, будет иметь ориентацию, которая отличается от ориентации магнитного поля земли. Соответственно, магнитометр 11 может обнаруживать векторы, указывающие направление магнитного поля земли, и векторы магнитного поля передатчика 110 для предоставления эталона для ориентации в пространстве и для изменений в положении.
[0135] В одном примере, магнитометр, регистрирующий магнитное поле земли, мог бы регистрировать ориентацию устройства 1 для гигиены ротовой полости в горизонтальной плоскости, как компас, или вокруг оси Z, проиллюстрированной на Фигуре 5. В некоторых вариантах осуществления это может включать в себя вектор не только в горизонтальном направлении, но в вертикальном направлении, который будет постоянным и основанным на наклоне магнитного поля земли в определенном географическом местоположении. В других вариантах осуществления передатчик 110 может размещаться в диагональной, горизонтальной или другой известной ориентации, которая используется в качестве эталонной точки для расчета ориентации магнитометра 11 и позиционных изменений магнитометра 11 и устройства 1 для гигиены ротовой полости.
[0136] Кроме того, может быть необходима калибровка на основе относительной ориентации устройства 1 для гигиены ротовой полости при использовании пользователем и передатчика 110 магнитного поля базовой станции. Так как форма и ориентация силовых линий магнитного поля изменяются на основе положения относительно генератора магнитного поля, могут требоваться различные формулы, калибровки или регулировки. Например, возле боковой стороны генератора магнитного поля, линии индукции могут быть сориентированы в первом направлении; однако, возле любого полярного конца передатчика 110 (например, верхнего или нижнего, или с правой или с левой стороны) линии индукции могут быть сориентированы перпендикулярно первому направлению возле боковой стороны или середины передатчика 110. Кроме того, может требоваться, чтобы пользователь чистил щеткой зубы на определенном расстоянии от передатчика 110, для обеспечения того, чтобы в таком положении генерировалось надлежащее магнитное поле для измерения. Преимущественным аспектом физической ориентации катушек в вертикальном направлении является то, что генерируемое магнитное поле является относительно одинаковым со всех сторон передатчика 110 (и, следовательно, базовой станции 2) при условии относительно одинаковой высоты, и, следовательно, калибровка может требовать более простых алгоритмов и/или процессов. Однако если катушки лежат в горизонтальной плоскости, в зависимости от ориентации базовой станции 2, линии магнитной индукции могут идти в различных направлениях. В таком варианте осуществления пользователю могут быть даны команды повернуть базовую станцию 2, чтобы обратить ее в определенном направлении относительно пользователя, где пользователь обычно чистит щеткой зубы. В других вариантах осуществления калибровка может быть способна использовать или приспосабливаться к переменам в направлении вектора магнитного поля, передаваемого передатчиком 110.
[0137] Данные от магнитометра 11 могут комбинироваться с выходными данными акселерометра 11 или данными от гирометра 11 и акселерометра 11 или оптического датчика 9 для определения ориентации и/или положения. Например, данные акселерометра 11 и/или оптического датчика 9 могут сначала использоваться для определения ориентации устройства 1 для гигиены ротовой полости относительно силы притяжения в периоды относительного малого ускорения, с тем чтобы ускорение силы притяжения обнаруживалось бы посредством трехосного акселерометра или анализа данных, с тем чтобы можно было определить, наклонено ли устройство 1 для гигиены ротовой полости вокруг поперечной оси, которая находится в горизонтальной плоскости, или как оно вращается вокруг своей продольной оси (продольной оси, проходящей по длине через зубную щетку) относительно силы притяжения, обращенной вниз по направлению к земле.
[0138] Если данные акселерометра указывают, что устройство 1 для гигиены ротовой полости испытывает относительно малые величины ускорения относительно нормальных перемещений при чистке зубов щеткой, система управления может определить, что устройство 1 для гигиены ротовой полости находится в относительном покое, и данные акселерометра могут использоваться для определения вектора, сориентированного в направлении силы притяжения.
[0139] Если данные акселерометра комбинируются с данными гирометра, могут определяться отклонения углового положения зубной щетки относительно силы притяжения для расчета углового положения зубной щетки. Например, начальная запись вектора силы притяжения может затем использоваться в качестве эталонного вектора для определения углового положения. Затем отклонения от этого начального положения или углового положения, определяемого акселерометром и гирометром, могут быть определены посредством расчета изменений ориентации относительно начального эталонного вектора на основе данных гирометра. Соответственно, данные акселерометра или акселерометра и гирометра могут использоваться для определения того, в каком направлении обращены щетинки. Например, в некоторых вариантах осуществления данные акселерометра и гирометра могут анализироваться для определения того, обращены ли щетинки вверх по направлению вперед или назад, вперед, влево и вправо, потенциально сводясь до конкретного квадранта или другой части рта. Например, когда щетинки устройства 1 для гигиены ротовой полости обращены вниз, они могут чистить щеткой только верхние части нижних зубов. Если щетинки устройства 1 для гигиены ротовой полости обращены вверх, оно может чистить щеткой только коронки или верхушки верхних зубов. В качестве дальнейшего примера, когда устройство 1 для гигиены ротовой полости обращено вверх, оно может чистить щеткой только левые стороны маляров и т. д. Кроме того, в некоторых вариантах осуществления ориентации относительно силы притяжения будут детерминированными, так как вектор, представляющий силу притяжения, всегда обращен в направлении пола или земли, и чистка щеткой, весьма вероятно, будет происходить в прямом вертикальном положении.
[0140] Следовательно, возможно определить ориентацию щетинок относительно зубов в некоторых аспектах или плоскостях ориентации. В определенных вариантах осуществления эти расчеты могут выполняться детерминированно или оцениваться используя статистику и/или усовершенствованную модель рта. Например, если акселерометр регистрирует, что щетинки зубной щетки обращены вниз в пределах определенного допустимого предела ошибки или в пределах статистически значимого допустимого предела, то система может определить, что поверхностями, которые чистятся щеткой, вероятно, являются верхние части нижних зубов (или язык, например). В других вариантах осуществления, как раскрывается в настоящем документе, ориентации чистки щеткой могут рассчитываться относительно друг друга, поэтому модель рта может подгоняться каждый раз, когда пользователь чистит щеткой зубы.
[0141] Для определения ориентации в горизонтальной плоскости, перпендикулярной силе притяжения, может использоваться магнитное поле земли или магнитное поле, генерируемое передатчиком 110 базовой станции 2, например. В некоторых вариантах осуществления передатчик 110 магнитного поля будет генерировать магнитное поле с векторами направления, которые изменяют направление в горизонтальной плоскости, которая перпендикулярна силе притяжения. Соответственно, даже если абсолютное направление не известно, относительная ориентация устройства 1 для гигиены ротовой полости относительно магнитного поля, обнаруживаемого магнитометром 11 и испускаемого передатчиком 110, может быть определена в горизонтальной плоскости. Соответственно, могут быть определены относительные изменения этой ориентации в горизонтальной плоскости, и может быть определен путь перемещения вдоль эталонной системы координат. В некоторых вариантах осуществления эталонная система координат может быть основана на одной из начальных или любых других точек данных, записываемых в ходе сеанса чистки зубов щеткой. Как раскрывается в настоящем документе, эти относительные изменения могут использоваться для расчета положений или реконструкции формы посредством использования относительных положений после того, как пользователь завершил чистку щеткой.
[0142] В некоторых вариантах осуществления данные от гирометра, магнитометра, оптического датчика и акселерометра могут использоваться для определения ориентации относительно силы притяжения и магнитного поля земли и/или передатчиков 110. В некоторых вариантах осуществления ориентация может определяться и подтверждаться или проверяться посредством различных датчиков 11 или оптических датчиков 9. Например, угловая скорость от гирометра может интегрироваться для определения изменений ориентации в определенных направлениях, но ошибки интегрирования могут корректироваться используя показания магнитометра и/или данные оптического датчика 9. В других вариантах осуществления магнитометр и/или гирометр и магнитометры могут использоваться в различных комбинациях для определения ориентаций.
[0143] В некоторых вариантах осуществления для определения положения устройства 1 для гигиены ротовой полости может использоваться только ориентация, используя статистический анализ, как раскрывается в настоящем документе. В других вариантах осуществления обнаруживаемые гирометром и/или акселерометром инерционные изменения могут использоваться вместе с показаниями магнитометра 11 или отдельно от них для предоставления дальнейшей индикации перемещения или расстояния для расчета оценочного положения щетинок устройства 1 для гигиены ротовой полости. В некоторых вариантах осуществления информация об ориентации может комбинироваться с выходными данными от датчиков 11 или оптических датчиков 9, которые указывают на инерцию поступательного движения или позиционные изменения. В зависимости от местоположения инерциального датчика, информация об ориентации может комбинироваться с инерциальными данными перемещения для указания положения щетинок. Например, если датчик 11 движения находится внутри устройства 1 для гигиены ротовой полости, но в середине продольной оси зубной щетки, где пользователь держал бы устройство 1 для гигиены ротовой полости, изменения в ориентации перемещали бы головку без перемещения положения (несмотря на то, что он может вращаться на месте) датчика 11 движения. Соответственно, информация об ориентации может также использоваться для расчета положения в пространстве щетинок относительно положения датчика 11.
[0144] Перемещение или позиционные изменения могут также рассчитываться исходя из данных, выводимых магнитометром 11. В некоторых вариантах осуществления магнитометр 11 может обнаруживать магнитное поле, генерируемое передатчиком 110 магнитного поля в базовой станции 2 или другом стационарном компоненте, отдельном от устройства 1 для гигиены ротовой полости. В этом варианте осуществления напряженность и ориентация магнитного поля, регистрируемого одно-, двух- или трехосным магнитометром 11, может предоставлять дополнительные данные по позиционному перемещению устройства 1 для гигиены ротовой полости относительно передатчика 110 магнитного поля в базовой станции 2, которая является фиксированной и стационарной. Соответственно, нарастание или убывание магнитного поля будет указывать на то, что устройство 1 для гигиены ротовой полости перемещается по направлению к или от базовой станции 2. Кроме того, изменения в ориентации или наклоне магнитного поля и его полярности, выводимой магнитометром 11, могут использоваться для определения поступательного движения и положения. Эта информация может использоваться для определения, на основе данных калибровки или экспериментальных данных, того, насколько изменение на единицу напряженности магнитного поля эквивалентно изменению на единицу расстояния на основе направления перемещения (так как разные направления через магнитное поле будут иметь более высокие или низкие скорости изменения). В других вариантах осуществления изменение на единицу наклона или формы магнитного поля может также коррелироваться с изменениями в положении. Соответствующая ориентация горизонтального магнитного поля может быть другой при каждом конфигурировании системы устройства для гигиены ротовой полости, раскрываемой в настоящем документе, включая такую систему, которая включает в себя магнитометр в базовой станции 2. Это обусловлено тем, что то, как стоит каждый пользователь, когда чистит зубы щеткой, и/или то, как базовая станция 2 сориентирована на столешнице, может меняться для каждого пользователя и даже несколько меняться каждый раз и после чистки столешницы и т.д. Соответственно, для определения относительных положений щетинок устройства 1 для гигиены ротовой полости может использоваться адаптивный статистический анализ.
[0145] Данные о положении, рассчитываемые исходя из выходных данных магнитного поля магнитометра 11, могут комбинироваться с инерционными данными для расчета изменений положения устройства 1 для гигиены ротовой полости. В некоторых вариантах осуществления инерционные данные могут использоваться для расчета пройденного расстояния, а данные магнитометра может также использоваться для устранения ошибок и/или предоставления границ для расчетов изменений положения на основе данных инерции. Например, изменения в напряженности магнитного поля могут иметь определенный минимальный нижний граничный предел при условии хода прямо перпендикулярно силовым линиям магнитных полей, где они наиболее сжаты. Имея определенное изменение в напряженности магнитного поля, можно определить, что магнитометр по меньшей мере прошел определенное евклидово расстояние в пространстве (или изменил определенную угловую ориентацию). Эти изменения в наклоне и напряженности поля могут использоваться для определения изменений расстояния в определенных допустимых пределах ошибки, которые могут дополняться или точно корректироваться в соответствии с данными акселерометра или гирометра. Эти данные могли бы комбинироваться с данными ориентации и инерционными данными для определения более точного пройденного расстояния и относительного направления движения устройства 1 для гигиены ротовой полости.
Время и положение чистки щеткой - распознавание визуальных шаблонов
[0146] В некоторых вариантах осуществления для отслеживания перемещения устройства 1 для гигиены ротовой полости может использоваться оптический датчик 9 и система распознавания шаблонов 120. Например, как описано выше, устройство 1 для гигиены ротовой полости может содержать шаблоны 120 на рукоятке 40 или головке 42, которые могут распознаваться посредством системы визуального отслеживания. Система визуального отслеживания может быть способна распознавать ориентацию, расстояние и положение шаблона 120, который расположен на устройстве 1 для гигиены ротовой полости. Например, в некоторых вариантах осуществления шаблон 120 может быть расположен на головке 42, а отдельный шаблон 120 может быть расположен на рукоятке 40 для обеспечения системе возможности определения положения как рукоятки 40, так и головки 42 устройства 1 для гигиены ротовой полости для содействия в определении ориентации и перемещения. Распознавание визуальных шаблонов использовалось для обнаружения перемещения и ориентации маркеров, такое как, например, система, описываемая в Towards Positioning through Visual Markers за авторством Bernhard L. Ecklbauer, описание которой включено во всей полноте посредством ссылки. Например, программное обеспечение для обработки изображений может идентифицировать границы устройства для гигиены ротовой полости посредством стандартных граничных идентификаторов изображений, идентифицировать объекты надлежащих габаритных параметров и размера для зубной щетки, а затем пытаться определять ориентацию устройства для гигиены ротовой полости (или определять ориентацию шаблона 120 и устройства для гигиены ротовой полости, соответственно).
[0147] В некоторых вариантах осуществления система распознания визуальных шаблонов может также использоваться для определения положения и ориентации лица человека. Это будет полезным для сравнения относительного положения и ориентации лица и/или рта и устройства 1 для гигиены ротовой полости для определения положения устройства для гигиены ротовой полости относительно рта. В некоторых вариантах осуществления система может сначала получать изображение с устройством 1 для гигиены ротовой полости на том же расстоянии от оптического датчика 9, что и лицо человека. Кроме того, начальная калибровка с использованием ориентации и размера лица может использоваться для калибровки расстояния от камеры 9 до устройства 1 для гигиены ротовой полости, с тем чтобы можно было оценить размер и перемещение. В некоторых вариантах осуществления так как размера устройства 1 для гигиены ротовой полости известен, может быть определен относительный размер лица, используя устройство 1 для гигиены ротовой полости, для калибровки или оценки формы и размера челюсти и модификации алгоритмов, используемых для определения того, какая зона чистится щеткой.
[0148] Например, система могла бы определять, находится ли устройство 1 для гигиены ротовой полости внутри или возле рта, если система может использоваться для определения положения и ориентации лица. Это поможет системе проверять и подтверждать, когда начинается и прекращается использование, так как устройство 1 для гигиены ротовой полости находилось бы возле рта пользователя только в том случае, если пользователь ее действительно использует. Редко когда пользователь держал бы щетку возле рта, если бы действительно не чистил щеткой зубы. Вместо этого, пользователь обычно немедленно обмывает/ставит устройство для гигиены ротовой полости после того, как завершает чистку щеткой.
[0149] Соответственно, данные, обнаруживаемые камерой, могут оцениваться для определения положения, перемещения и ориентации устройства 1 для гигиены ротовой полости. Например, устройство 1 может иметь код «AB» с окружностью и линией, как проиллюстрировано на Фигуре 6, либо на задней части головки 42, либо на рукоятке 40, либо на них обеих. В некоторых вариантах осуществления шаблон 120 мог бы представлять собой любой другой шаблон 120, который имеет отчетливую ориентацию, как описано в настоящем документе. Камера 9 может обнаруживать шаблон, и могут быть получены данные для обработки и анализа. Например, могут быть выведены визуальные данные, обнаруживаемые камерой, и процессор может оценивать данные для определения ориентации и размера шаблона 120 и относительных размеров определенных частей шаблона 120.
[0150] Например, если шаблоном является AB и он сориентирован, как изображено на задней части головки 42 устройства 1 для гигиены ротовой полости, и анализ данных определяет, что AB сориентирован в вертикальном положении, то, вероятно, пользователь не чистит щеткой зубы. Это обусловлено тем, что это будет означать, что само устройство 1 для гигиены ротовой полости находится в вертикальном положении (как изображено на ФИГ. 6), что было бы крайне маловероятным положением для того, чтобы пользователь держал устройство 1 для гигиены ротовой полости для чистки зубов щеткой. Вместо этого, в ходе чистки зубов щеткой продольная ось устройства 1 для гигиены ротовой полости будет обычно удерживаться в горизонтальной плоскости. Однако если камера 9 обнаруживает данные, которые указывают на то, что AB на головке устройства 1 для гигиены ротовой полости расположено боком, это, вероятно, означает две вещи: (1) устройство 1 для гигиены ротовой полости расположено таким образом, что задняя часть головки 42 устройства 1 для гигиены ротовой полости обращена к пользователю, так как AB фактически видимо камере 9 и (2) устройство 1 для гигиены ротовой полости расположено горизонтально, так как AB сориентировано на боку. Это, например, давало бы высокую вероятность того, что устройство 1 для гигиены ротовой полости выполняет чистку щеткой передних резцов. Это обусловлено тем, что камера 9 в целом располагается таким образом, что пользователь обращен к камере 9, когда он чистит зубы щеткой. Соответственно, если AB видимо для камеры 9 и лежит на боку, то устройство 1 для гигиены ротовой полости должно быть сориентировано таким образом, что щетинки обращены ко рту (для чистки щеткой передних поверхностей) и чистят щеткой передние зубы (а не боковые), так как AB все еще видимо для камеры 9, обращенной вперед.
[0151] В многих положениях устройств 1 для гигиены ротовой полости, однако, головка 42 устройства 1 для гигиены ротовой полости и любой связанный шаблон 120 могут не быть видимы для камеры 9. Например, при чистке щеткой моляров, языка, верхней или нижней поверхностей зубов, шаблон 120 на задней части головки 42 не был бы видимым. Соответственно, в некоторых вариантах осуществления на насадке 130 на конце устройства 1 для гигиены ротовой полости может быть включен дополнительный шаблон(-ы) 120. Это позволило бы камере 9 обнаруживать ориентацию шаблона 120 на насадке 130 и/или рукоятке 40, когда устройство 1 для гигиены ротовой полости помещено в рот пользователя. Например, в некоторых вариантах осуществления насадка 130 может представлять собой выпуклость сферической формы на нижней части рукоятки 40 устройства 1 для гигиены ротовой полости и включало бы в себя несколько различных шаблонов в различных положениях по окружности сферы.
[0152] Это позволило бы камере обнаруживать положение и ориентацию нескольких различных шаблонов. По визуальном обнаружении шаблона система могла бы определить, (1) какой шаблон 120 обнаруживается, (2) размер шаблона 120, (3) ориентацию шаблона 120, (4) относительный размер различных компонентов шаблона 120, (5) другие характеристики шаблона 120. Эта информация могла бы загружаться и сравниваться с существующими данными относительно типов и ориентации шаблонов 120, которые расположены на насадке 130 (и/или рукоятке 40 или головке 42 устройства 1 для гигиены ротовой полости). Например, система может включать в себя базу данных, в которой хранится каждый из различных шаблонов 120 и различная информация о размере и ориентации, относящаяся к шаблону 120, относительно устройства 1 для гигиены ротовой полости и расстояния от камеры 9. Например, каждый шаблон 120 может включать в себя информацию о том, что если он находится в вертикальной ориентации, то устройство для гигиены ротовой полости расположено на боку, обращенным ко рту, и т. д. В других вариантах осуществления размер обнаруженного шаблона 120 может приравниваться к расстоянию устройства 1 для гигиены ротовой полости от камеры 9, при условии заданного расстояния. В некоторых вариантах осуществления может далее добавляться калибровочная информация для совершенствования системного анализа данных чистки щеткой для определенного лица и/или определенной ванной комнаты. Следовательно, каждый шаблон 120 может иметь количество пикселей, связанное с каждым компонентом (например, высота/ширина определенных характерных признаков), которое может быть связано с определенным расстоянием от камеры 9. Оно может быть приблизительным или средним, или может использовать статистику для нахождения наиболее высоковероятного расстояния/ориентации.
[0153] Затем, после определения этой информации об шаблоне, она может сравниваться с калибровочной информацией или другими данными, представляющими шаблоны 120 и соответствующие ориентации, которые включены на насадке 130, например. Если, например, шаблон AB 120 включен на насадке 130, как проиллюстрировано на Фигуре 6, с вертикальной ориентацией и обращенным вперед в том же направлении, что и щетинки, то, в случае если этот шаблон обнаруживается в вертикальном положении, то маловероятно, что пользователь чистит щеткой зубы. Однако, опять-таки, если этот шаблон 120 обнаруживается с боковой ориентацией, вероятно, что пользователь чистит передние моляры. В другом примере, если другой шаблон BC расположен на нижней части зубной щетки, то, когда система обнаруживает этот шаблон, вероятно, что устройство для гигиены ротовой полости используется для чистки моляров. Соответственно, ориентация BC может затем использоваться для определения того, вероятно ли, что пользователь чистит верхние, нижние или боковые части моляров. В некоторых вариантах осуществления это может комбинироваться с данными акселерометра и гирометра для определения того, какая сторона рта чистится щеткой.
[0154] В еще одном варианте осуществления система может быть способна определять положение устройства для гигиены ротовой полости (без шаблона) относительно лица, включая вектор направления его продольной оси. Соответственно, система затем могла бы определять, на левой или правой стороне рта находится, вероятно, устройство для гигиены ротовой полости. Это могло бы осуществляться посредством системы визуального распознавания, как раскрывается в настоящем документе. В других вариантах осуществления система могла бы определять положение и ориентацию рта и устройства для гигиены ротовой полости относительно друг друга. Например, алгоритм распознавания рта мог бы использоваться для приблизительного определения положения каждого из уголков или сторон рта. Кроме того, на шейке устройства 1 для гигиены ротовой полости могли бы быть расположены маркеры для содействия системе в определении того, какая сторона рта чистится щеткой, когда устройство для гигиены ротовой полости расположено во рту пользователя.
Отсутствие шаблона на зубной щетке.
[0155] Как проиллюстрировано на ФИГ. 7 и в некоторых вариантах осуществления система может обнаруживать только очертания рукоятки 1 устройства для гигиены ротовой полости для определения ориентации продольной оси относительно силы притяжения без использования шаблона 120 или маркировки. В других вариантах осуществления система может иметь дополнительное программное обеспечение для обработки изображений для идентификации конкретных характерных особенностей устройства для гигиены ротовой полости, включая головку (щетинки и т. д.), используя алгоритмы классификации для классификации определенных частей изображения. В некоторых вариантах осуществления программное обеспечение для обработки изображений идентифицирует продольную ось, головку, базу и потенциально щетинки. Исходя из этой информации, может быть определена ориентация и положение устройства для гигиены ротовой полости. В некоторых вариантах осуществления пользователь и рот пользователя могут быть идентифицированы, используя аналогичное программное обеспечение для обнаружения границ/классификации формы. Соответственно, может быть определено относительное положение устройства для гигиены ротовой полости относительно рта, как поясняется далее в настоящем документе.
[0156] Изобретатели могут использовать эту систему, с тем чтобы не требовалось специально адаптированное устройство для гигиены ротовой полости, и нужно было бы только предусмотреть микросхему внутри устройства для гигиены ротовой полости, которое включает в себя датчики 11 движения. Соответственно, устройство могло бы быть изготовлено, используя существующие конструкции устройств гигиены ротовой полости и реализовав только микросхему или систему 13 контроллера, которая включает в себя датчик 11 движения, антенну 5 или другие возможности беспроводного подключения, и память. Затем устройство могло бы отправлять все данные подключенному смартфону или другому подключенному устройству 30 (например, интеллектуальному зеркалу и т. д.)
Комбинирование визуальных данных и данных движения для определения положения
[0157] Визуальные данные могут также использоваться для определения ускорения и вектора или направления движения устройства 1 для гигиены ротовой полости, по мере того как оно чистит щеткой зубы. Визуальные данные могут захватывать различные положения и присваивать метки времени данным для определения количества времени, записанного для хода из первой точки во вторую точку, и, следовательно, результирующую скорость (направление и скорость) и ускорение. Как описывается в настоящем документе, данные положения могут использоваться для расчета положений чистки щеткой. Это в комбинации с данными ориентации сможет предоставить достаточно данных положения и ориентации для определения положения во рту пользователя и секции рта, которая чистится щеткой, как описывается в настоящем документе.
[0158] Например, в некоторых вариантах осуществления визуальная информация, полученная исходя из распознавания шаблонов или очертаний щетки, может использоваться для перекалибровки или вывода положения исходя из определения положения акселерометра/магнитометра/гирометра. В этих вариантах осуществления визуальные данные могут использоваться для перекалибровки дрейфа, испытываемого датчиками положения, для их возврата в эталонную систему координат. В других вариантах осуществления визуальные данные могут использоваться для перекалибровки всей статистической модели, используемой для определения положения.
[0159] В некоторых вариантах осуществления положение может независимо быть определено посредством датчиков движения/ускорения/положения и независимо определяться, исходя из данных визуального распознавания. Эти два определения могут затем использоваться для определения окончательного положения относительно рта. В других вариантах осуществления для расчета положения относительно рта могут использоваться только одни данные визуального распознавания.
[0160] Например, первым примером была бы конфигурация без визуального шаблона 120, добавленного к устройству 1 для гигиены ротовой полости. Используя только выходные данные от датчика(-ов) 11 движения, может быть трудно различить, в некоторых ситуациях, на какой стороне рта находится устройство 1 для гигиены ротовой полости, когда устройство для гигиены ротовой полости сориентировано в одним и том же направлении, но может чистить щеткой различные секции зубов. Например, его ориентация вокруг оси идентична или близка к идентичной, но его положение на одной стороне лица, находится на левой или правой стороне рта.
[0161] Например, неоднозначным определением могло бы быть: чистит ли щеткой пользователь внешнюю поверхность зубов с левой стороны рта, или чистит ли щеткой пользователь внутреннюю поверхность зубов с правой стороны рта? Даже без дополнительного визуального шаблона 120, только посредством визуальной информации устройства для гигиены ротовой полости и лица пользователя система может различать левую сторону и правую сторону. Таким образом, комбинация алгоритмов в данной случае является преимущественной, так как известно, что инерционных данных недостаточно для установления относительного пространственного положения в системе координат, окружающей голову. Таким образом, визуальная информация может использоваться для осуществления вспомогательного определения того, на какой стороне головы расположена щетка, и, следовательно, визуальная информация и информация об ориентации (вокруг оси или точки или относительно силы притяжения) могут комбинироваться для определения того, на какой стороне головы расположена щетка 1, и (например, чистится ли внутренняя или внешняя поверхность зубов).
[0162] Другой пример может включать в себя вариант осуществления с шаблоном 120, прикрепленным к устройству 1 для гигиены ротовой полости. Например, шаблон 120 может добавляться к нижней части устройства 1 для гигиены ротовой полости и к задней части головки щетки 1. В случае с шаблоном 120, однако, могут быть положения устройства 1 для гигиены ротовой полости, в которых одной только визуальной информации было бы недостаточно для определения местоположения и ориентации устройства 1 для гигиены ротовой полости с достаточной точностью. Например, когда визуальные метки частично скрыты или слишком малы на разрешении изображения, чтобы мог быть точно определен их размер и ориентация.
[0163] Например, если пользователь чистит щеткой моляры, и единственный видимый шаблон 120 находится на нижней части устройства 1 для гигиены ротовой полости, и разрешение низкое (например, потому, что пользователь находится слишком далеко от устройства-камеры, или потому, что пользователь использует камеру, имеющую недостаточное разрешение), то система может быть не способна определить с достаточной точностью угол, под которым щетка 1 расположена на зубах. Следовательно, система не могла бы определить, чистит ли щеткой пользователь внешнюю часть моляров верхней челюсти или внешнюю часть моляров на нижней челюсти.
[0164] В этом случае, разница углов (например, угол продольной оси устройства для гигиены ротовой полости относительно силы притяжения, потому что вы держите устройство для гигиены ротовой полости под слегка другим углом при чистке щеткой верхних или нижних моляров) может быть довольно незначительной между двумя этими положениями чистки щеткой. Однако, данные движения (особенно ускорение и вертикальная ориентация) могут быть способны устранять неоднозначность двух потенциальных положений, сведение к которым было выполнено посредством визуальных данных, и, следовательно, предоставить необходимую информацию касательно того, чистит ли щеткой устройство 1 для гигиены ротовой полости верхнюю или нижнюю челюсть. Соответственно, одни только визуальные данные могут дополняться данными движения для определения положения или секции зубов, которая чистится щеткой.
Время и положение чистки щеткой - анализ данных движения
[0165] Для использования данных от датчиков для оценки количества времени, проведенного в каждой секции, квадранте или другой логической части рта, пользователю может быть необходимо откалибровать устройство 1 для гигиены ротовой полости. В некоторых вариантах осуществления калибровка может осуществляться на заводе, пользователем, либо и тем и другим. Соответственно, калибровка могла бы использоваться для калибровки специально изготовленной единицы и для адаптации к определенной географии, анатомии (например, росту) и/или окружающей среде ванной комнаты пользователя, которая, например, может включать в себя уникальные магнитные помехи, уникальные высоты и ориентации (столешницы могут быть не ровными, и т. д.). Например, в некоторых вариантах осуществления пользователь может нанести на зубы цветной гель. Пользователь затем может перевести устройство 1 для гигиены ротовой полости в режим калибровки, когда устройство 1 для гигиены ротовой полости находится в положении возле зубов, и счистить щеткой весь цветной гель, в то время как датчики 11 движения и оптический датчик(и) 9 и другие датчики записывают данные.
[0166] На этом этапе пользователь может отключить калибровку, чтобы прекратить получение калибровочных данных. В других вариантах осуществления когда пользователь включает функцию калибровки, устройство 1 для гигиены ротовой полости обнаруживало бы моменты времени, когда пользователь начал и прекратил чистку щеткой, включая любые приостановки в чистке щеткой. Эта процедура калибровки предоставляет эталонные калибровочные данные положения, ориентации и движения, которые могут затем сравниваться с последующими щетками, используя статистический анализ 78 или другие методы анализа для определения того, чистили ли последующие щетки все области рта в течение достаточного времени.
[0167] Когда устройство откалибровано или использует эталонные данные от предыдущей чистки щеткой и/или другой модели чистки щеткой пользователем, данные чистки щеткой от каждого использования могут сравниваться с эталонными данными для оценки его качества 78 и определения положения устройства 1 для гигиены ротовой полости во вновь полученных данных. Например, калибровочные данные могут использоваться для подготовки статистической модели формы и габаритных параметров рта конкретного пользователя и могут использоваться для создания определенных статистических границ для определения того, когда устройство 1 для гигиены ротовой полости чистит щеткой какую-либо определенную секцию рта пользователя. Затем, когда пользователь инициирует чистку щеткой второй раз, вновь записанные данные могут затем накладываться или коррелироваться с калибровочными данными чистки щеткой, связанными с этим профилем 60 пользователя, для определения того, присутствовали ли какие-либо недостатки при чистке щеткой и где. Например, система 100 может определять количество времени, затраченного на чистку щеткой каждого квадранта, количество ходов, или выполнять другие оценки чистки щеткой. Кроме того, анализ может указывать на то, что пользователь слишком много чистил щеткой в определенных зонах или не использовал корректные схемы хода в целом или в конкретных секциях рта пользователя.
[0168] Корреляция может выполняться посредством статистического анализа, например, количественное сравнение таких различий может выполняться просто посредством измерения евклидова расстояния в пространстве 3xz. Такие векторы могут затем обрабатываться посредством использования статистических анализов, включая анализ главных компонентов (АГК), иерархический кластерный анализ (ИКА), регрессионный анализ и линейный дискриминатный анализ. Могут использоваться статистические способы, подходящие для данных высокой размерности. В качестве примера, ИКА систематически изучает расстояние между данными, которые представляют каждый тип движения, или данные положения. Затем может генерироваться дендрограмма, которая показывает кластеризацию данных, полученных исходя из евклидовых расстояний между и среди векторов данных, во многом подобно генеалогическому древу.
[0169] Каждый кластер статистических данных может быть репрезентативным для данных датчиков для каждой секции, квадранта или другой логической части рта пользователя. Например, рот может быть разделен на верхнюю и нижнюю часть, при этом как верхняя, так и нижняя часть будет иметь правую, переднюю и левую часть, а каждая из правой, передней и левой частей будет иметь внутреннюю, верхнюю и внешнюю поверхность. Соответственно, рот может иметь 36 различных секций, 10 секций, 8 секций, 12 секций или 4 секции (квадранта), только верхнюю и нижнюю, только внешнюю и внутреннюю и другие логические части. Соответственно, используя эталонные данные, контроллер 13 или другие процессоры в системе 100 (например, процессоры в мобильном телефоне или серверах) могут рассчитывать доверительный интервал или другое значение, указывающее на то, что устройство для гигиены ротовой полости чистит щеткой конкретную секцию рта пользователя, но определять вероятность того, что ходы коррелируют или относятся к калибровочным данным в этих секциях. Для получения эталонного положения пользователю могут быть даны команды инициировать чистку щеткой в идентичном положении рта. Таким образом, данные начнутся в известном положении и смогут использовать его в качестве эталонной точки для соотнесения остальных данных, используя статистический анализ. Например, угол, ориентация, рассчитанное расстояние и другие характерные признаки, получаемые исходя из эталонного положения устройства 1 для гигиены ротовой полости, обнаруживаемые датчиком 11 движения и/или оптическим датчиком 9 могут указывать на вероятность корреляции каждого нового положения с определенным положением рта на основе калибровочных данных.
[0170] В других вариантах осуществления система 13 управления или другие системные процессоры (например, процессоры в смартфоне, серверах или других компонентах) могут обрабатывать статистические данные и определять, что щетка осуществляет чистку щеткой в определенной секции рта, если статистический анализ показывает с более чем 95%, 85%, 80% или другой подходящей достоверностью, что щетка находится в секции рта. В некоторых вариантах осуществления специфичность или чувствительность статистического анализа чистки щеткой может модифицироваться в соответствии с дисперсией конкретного пользователя.
[0171] Этот анализ может включать в себя вывод 80, который позволяет системе 13 управления или другим процессорам определять, какие ходы щетки находились в каждой секции рта или набора зубов, и, следовательно, сколько времени пользователь провел, чистя щеткой каждый квадрант, половину или зуб или другую логическую часть рта, и сравнивать это время с рекомендуемыми режимами. В других вариантах осуществления может записываться время на начало и конец входа в определенную зону, или другие подходящие способы определения того, сколько времени затрачивается на чистку щеткой каждой секции рта.
[0172] В некоторых вариантах осуществления вместо того чтобы определять положение зубной щетки, система 100 может давать пользователю указания чистить определенные секции рта по одной, и определять только то, действительно ли пользователь выполняет чистку щеткой или нет, и подсчитывать или записывать время чистки щеткой только до тех пор, пока обнаруживается движение, указывающее на чистку щеткой. Затем, после записи чистки щеткой в указанной секции в течение предписанного времени, система 100 указывала бы пользователю, что пришло время перейти к следующей секции рта, и отняло бы время, когда пользователь действительно выполняет чистку щеткой. Это не позволяет пользователю делать перерывы и, следовательно, выполнять чистку в течение времени, меньшего, чем оптимальное количество времени, в каждой секции. Соответственно, система 13 управления или другие процессоры могут анализировать данные от датчиков 11 (или датчика 10 давления) для записи количества времени, в течение которого пользователь выполняет чистку щеткой в каждой секции, тогда как система 100 указывала пользователю, что ему следует чистить щеткой в этой конкретной секции.
[0173] В других вариантах осуществления давление прилагаемое к головке 42 вследствие чистки щеткой, может также обнаруживаться датчиком 10 давления, включенным в устройство 1 для гигиены ротовой полости. Например, датчик 10 давления может включаться в 42 и обнаруживать давление, связанное с использованием. Кроме того, давление может наноситься на карту в соответствии с различными данными положения и, следовательно, контроллеры 13 или другие процессоры системы 100 могут рассчитывать количество давления, используемое для чистки щеткой каждой зоны рта.
Представление обратной связи
[0174] После того, как контроллер(-ы) 13 системы 100 или другие процессоры, содержащиеся в смартфоне, серверах или других компонентах системы 100 проанализировали данные 78 об использовании, пользователю 80 может быть представлена обратная связь посредством динамика 50, визуальных индикаторов 52 на устройстве 1 для гигиены ротовой полости или посредством связанного мобильного устройства 30 или другого вычислительного устройства, состоящего в связи для передачи данных с системой 100. Эта обратная связь может представляться мгновенно или быть доступной для проверки хода выполнения.
[0175] Например, в ходе чистки щеткой пользователю 80 может предоставляться мгновенная обратная связь, которая включает в себя индикацию посредством звуковых или визуальных средств, которые указывают на то, сколько времени осталось, следует ли чистить щеткой сильнее или мягче, достаточно ли были вычищены щеткой определенные квадранты, и когда завершается чистка щеткой. Например, для указания завершения чистки щеткой, может выводиться красный свет или звук прекращения посредством динамика 50.
[0176] Кроме того, пользователю 80 могут представляться исторические и средние данные времени чистки и данные о положении на мобильном устройстве или другом вычислительном устройстве, используя графики, таблицы, процентные доли и другую метрику. Например, пользователю может представляться среднее время, проводимое в день в каждом квадранте, и средние дни, в которые пользователь выполняет чистку щеткой один, два или другое количество раз. Кроме того, на мобильном устройстве 30 или другом вычислительном устройстве может рассчитываться и представляться пользователю среднее время, затрачиваемое на чистку щеткой каждого зуба. Программа 15, выполняемая на мобильном устройстве, может управлять представлением данных, используя контроллер 13 мобильного устройства 30.
API для интеграции с зубным врачом
[0177] Кроме того, может быть разработан API для передачи данных чистки щеткой и использования зубному врачу для профессиональной оценки и обратной связи по привычкам и техникам чистки щеткой. Кроме того, эти данные могут оцениваться для определения техник чистки зубной щеткой, которые приводят к большим стоматологическим проблемам, включающим в себя полости и заболевание десен. Например, ширина и высота ходов может коррелироваться с высотой, которой достигает щетка вдоль пришеечной части десен, указывая на то, надлежащим ли образом чистятся щеткой десны. Это может анализироваться для определения того, приводят ли короткие по высоте ходы к более частым случаям заболевания десен.
Игрофикация
Данные об использовании могут также использоваться для создания игр для детей или членов семьи, в которые они смогут играть в одиночку или друг против друга, для достижения определенных порогов использования. Это может предоставить уникальный мотивационный инструмент для того, чтобы пользователи чистили щеткой зубы на регулярной основе. Соответственно, тогда как обратная связь с задержкой, например, в случае заболевания десен или полостей в целом физиологически обесценивается, более оперативная и постоянная конкретная и количественная обратная связь, предлагаемая настоящим изобретением, будет предоставлять намного лучший стимул к соблюдению рекомендуемых режимов чистки щеткой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ КОНТРОЛЯ СОБЛЮДЕНИЯ ГИГИЕНЫ ПОЛОСТИ РТА И СИСТЕМА ТЕЛЕ-СТОМАТОЛОГИИ | 2017 |
|
RU2753920C2 |
| СИСТЕМЫ ДЛЯ ГИГИЕНЫ ПОЛОСТИ РТА | 2018 |
|
RU2753629C1 |
| СЕТЬ ДЛЯ ВЗАИМОДЕЙСТВИЯ УСТРОЙСТВ ДЛЯ ЛИЧНОЙ ГИГИЕНЫ | 2017 |
|
RU2757348C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УХОДА ЗА РОТОВОЙ ПОЛОСТЬЮ | 2017 |
|
RU2710685C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ УСТРОЙСТВА ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА | 2016 |
|
RU2728406C2 |
| КОНТРОЛЬ ХАРАКТЕРИСТИК КОСТЕЙ | 2017 |
|
RU2748048C2 |
| СИСТЕМА И СПОСОБ УХОДА ЗА ПОЛОСТЬЮ РТА | 2017 |
|
RU2712406C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ СООТВЕТСТВИЯ СЕАНСУ УПРАВЛЯЕМОЙ ЧИСТКИ | 2017 |
|
RU2753556C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА | 2017 |
|
RU2712338C1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ПРОФИЛЯ СОСТОЯНИЯ ЗДОРОВЬЯ ИЗ ИНФОРМАЦИИ, ПОЛУЧЕННОЙ ОТ ИНСТРУМЕНТА ПО УХОДУ ЗА ПОЛОСТЬЮ РТА | 2008 |
|
RU2464953C2 |
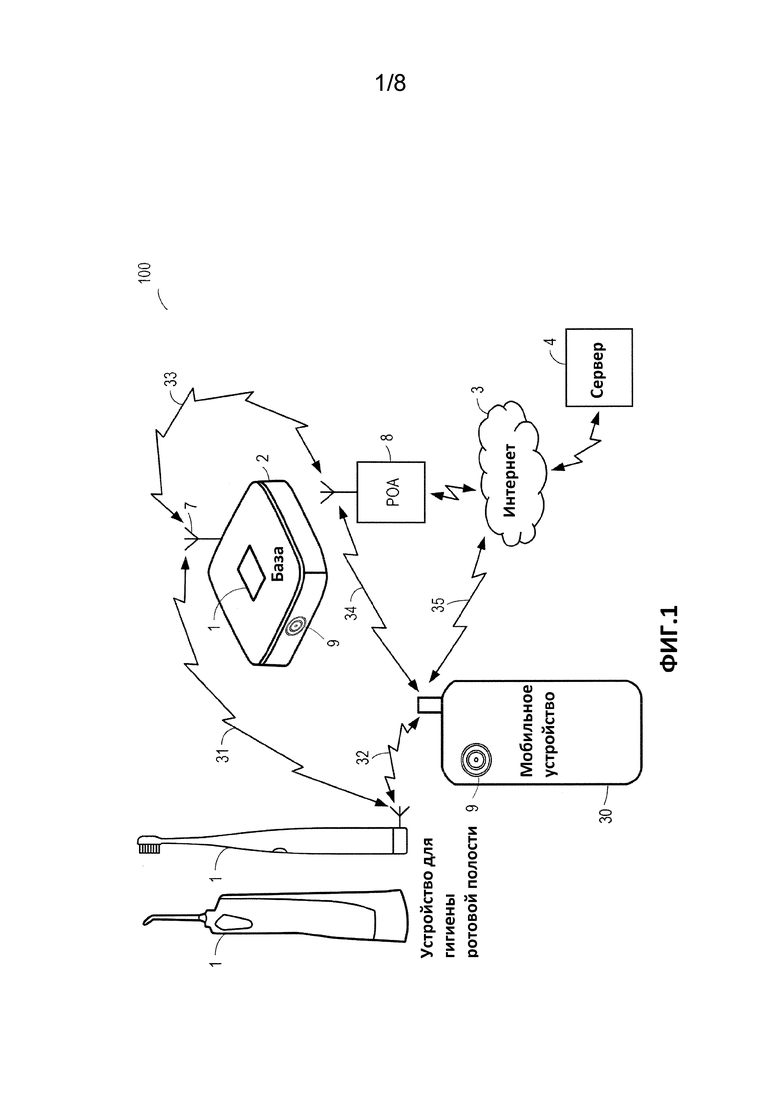
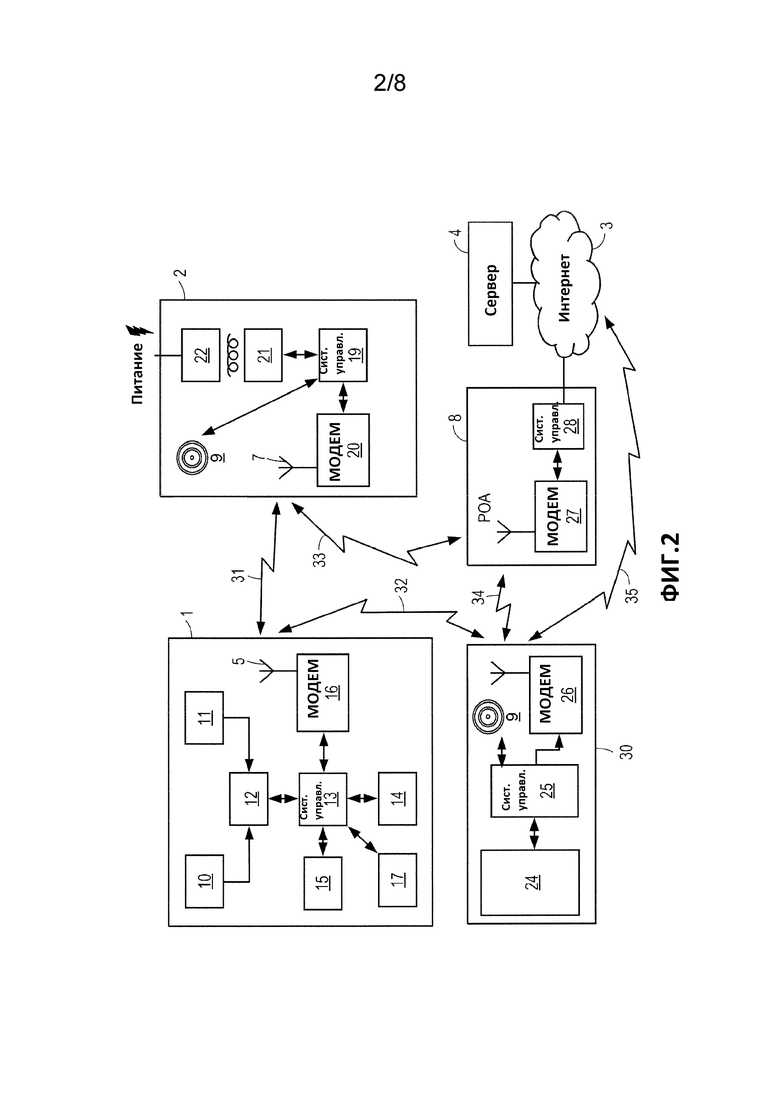
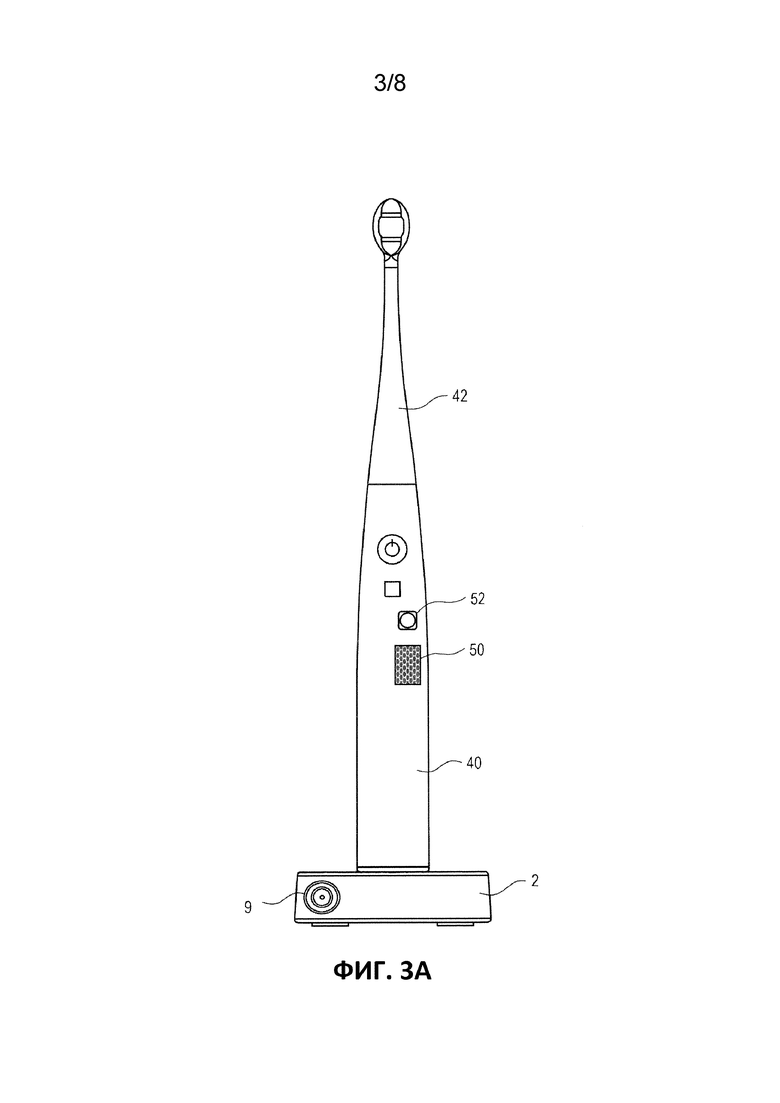
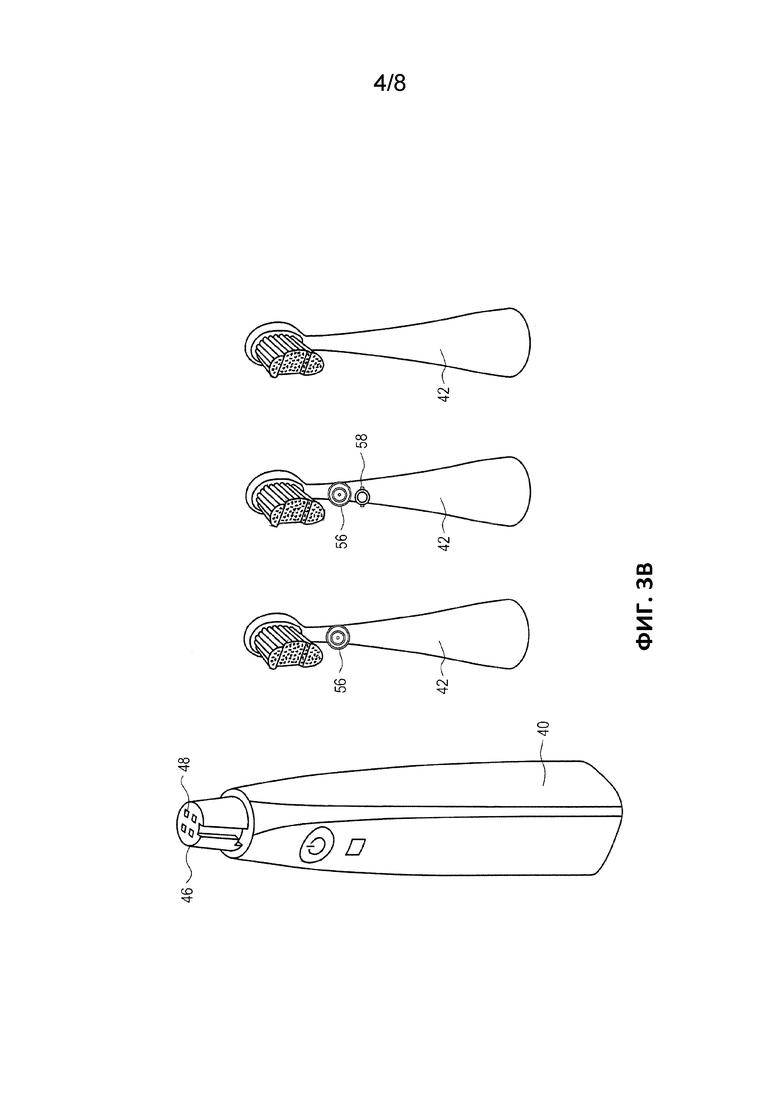
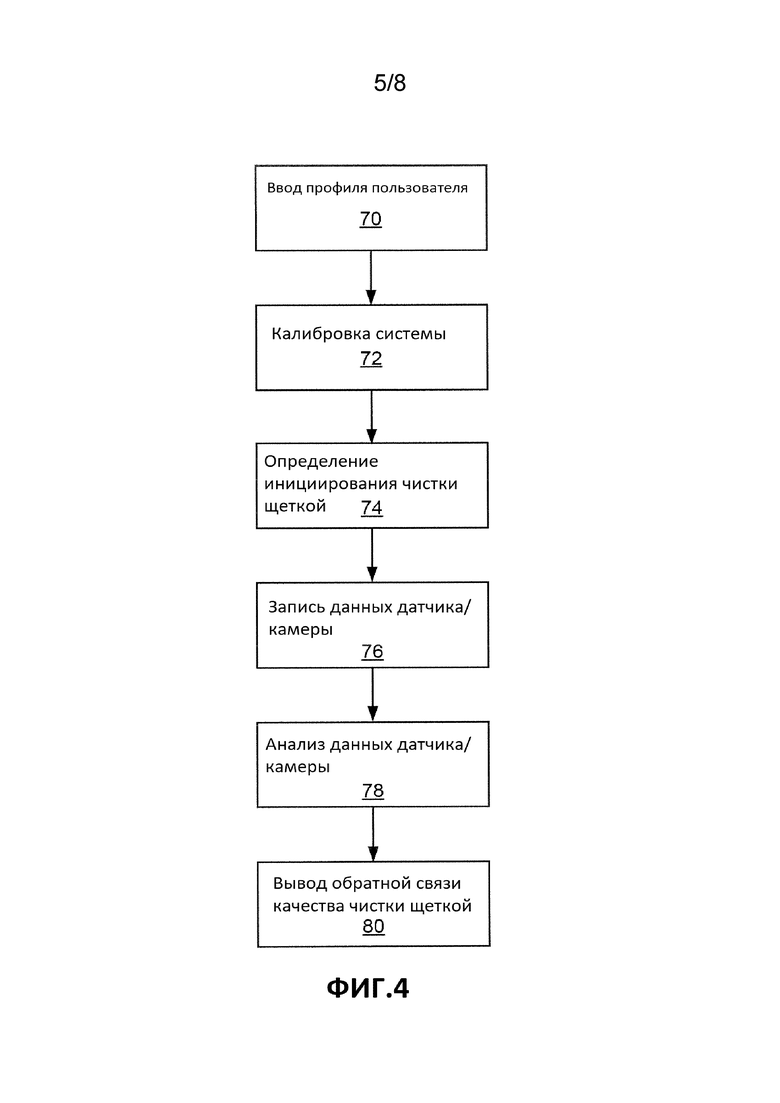
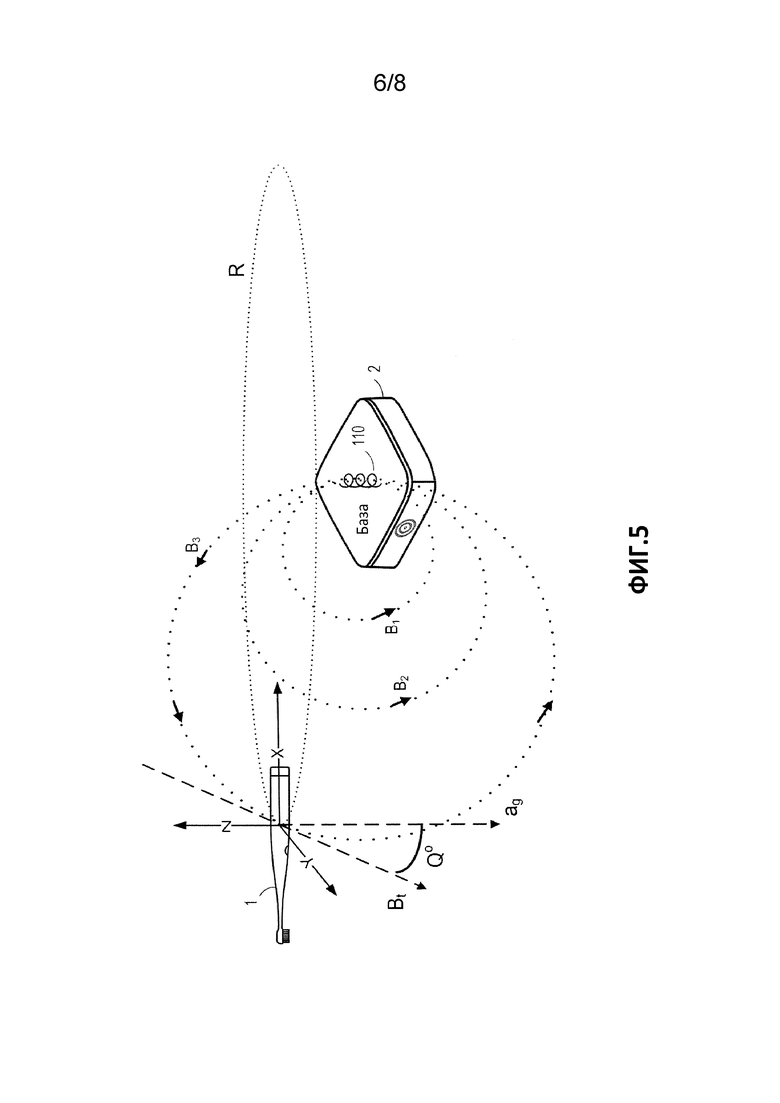
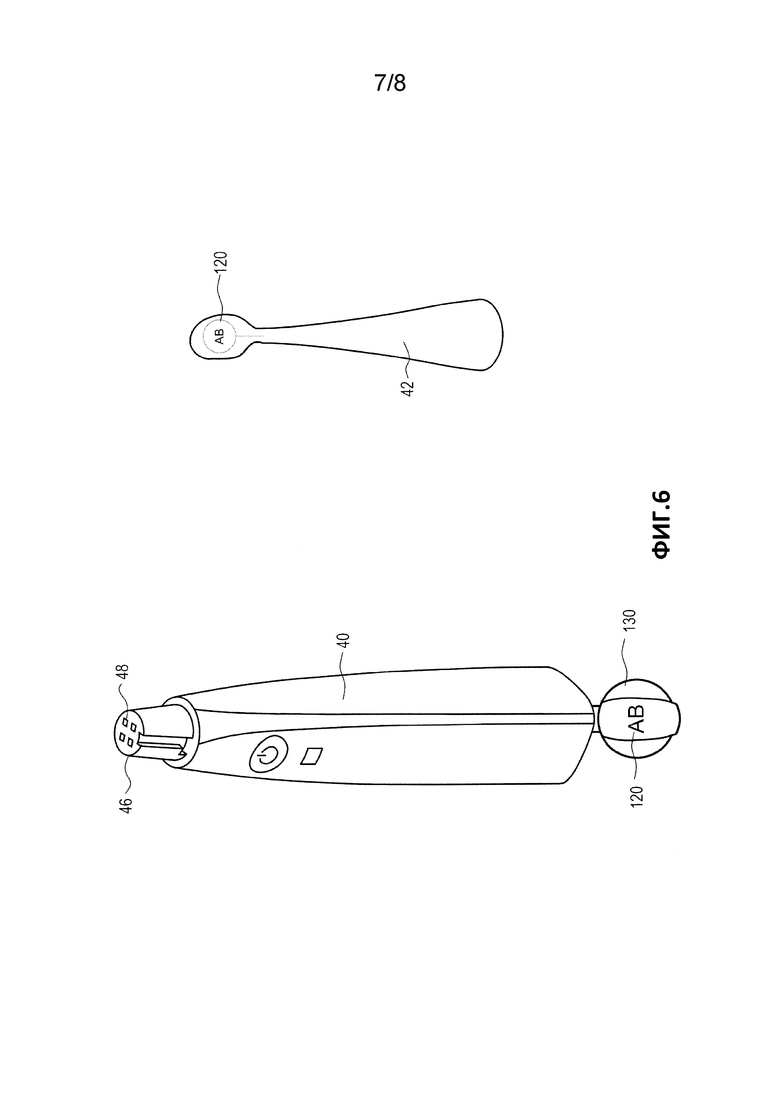
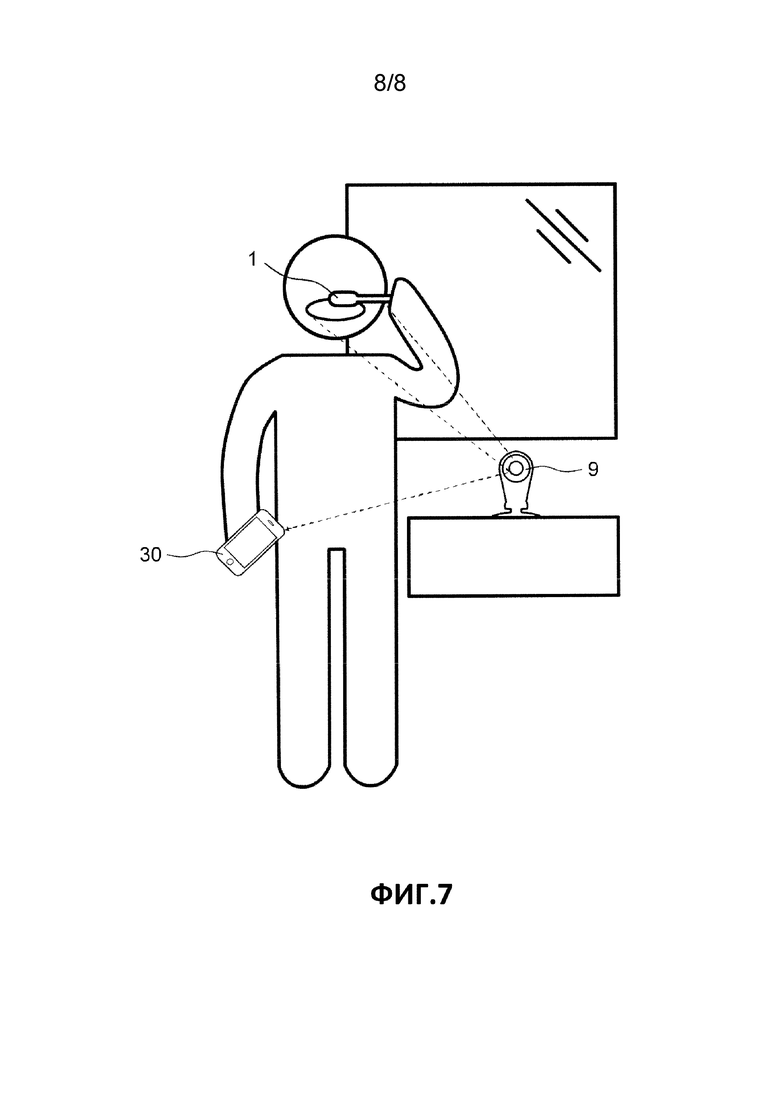
Изобретение относится к способам и устройствам для контроля деятельности в области гигиены ротовой полости. Система контроля чистки зубов щеткой включает в себя устройство для гигиены ротовой полости с отдельным оптическим датчиком для отслеживания изменений положения устройства для гигиены ротовой полости. Оптический датчик может самостоятельно или в комбинации с данными датчика движения определять положение и ориентацию устройства для гигиены ротовой полости относительно рта пользователя. Система может затем определять качество, количество и местоположение чистки щеткой и предоставлять обратную связь по качеству чистки щеткой. Эта обратная связь предоставляет мотивацию для пользователей для улучшения их привычек в области чистки щеткой, приводя к сокращению налета, кариеса зубов и гингивита. 6 н. и 41 з.п. ф-лы, 8 ил.
1. Система гигиены ротовой полости для контроля соблюдения режима гигиены ротовой полости, содержащая:
устройство для гигиены ротовой полости, содержащее рукоятку, головку и насадку, присоединяемую к концу рукоятки, причем насадка включает в себя первый шаблон;
оптический датчик, выполненный с возможностью вывода визуальных данных, включающих изображение устройства для гигиены ротовой полости и пользователя; и
систему управления, выполненную с возможностью определения вероятности того, что головка устройства для гигиены ротовой полости располагается в одной из множества областей рта пользователя на основе по меньшей мере сравнения ранее записанных калибровочных данных и по меньшей мере части визуальных данных, выводимых оптическим датчиком с использованием статистического анализа.
2. Система по п.1, в которой система управления определяет ориентацию устройства для гигиены ротовой полости на основе по меньшей мере анализа первого шаблона в данных, выводимых оптическим датчиком.
3. Система по п.1, в которой насадка к устройству для гигиены ротовой полости является по существу сферической.
4. Система по п.1, в которой головка устройства для гигиены ротовой полости включает в себя второй шаблон.
5. Система гигиены ротовой полости по п.1, в которой первый шаблон включает в себя цвет.
6. Система по п.1, в которой устройство для гигиены ротовой полости представляет собой зубную щетку.
7. Система по п.1, в которой положение устройства для гигиены ротовой полости определяется относительно рта пользователя.
8. Система по п.1, в которой положение устройства для гигиены ротовой полости определяется посредством определения положения головки, рукоятки или первого шаблона на устройстве для гигиены ротовой полости.
9. Система по п.1, в которой ориентация устройства для гигиены ротовой полости определяется системой управления на основе по меньшей мере визуальных данных, выводимых оптическим датчиком.
10. Система по п.1, в которой устройство для гигиены ротовой полости дополнительно включает в себя датчик движения, который выводит данные движения, относящиеся к ориентации устройства для гигиены ротовой полости, и в которой система управления определяет ориентацию устройства для гигиены ротовой полости в пространстве дополнительно на основе выходных данных движения от датчика движения.
11. Система по п.1, в которой система управления также определяет относительные изменения положения устройства для гигиены ротовой полости, используя выходные визуальные данные от оптического датчика.
12. Система по п.11, в которой система управления использует выходные данные от оптического датчика для определения оценочного окна расстояния, внутри которого устройство для гигиены ротовой полости изменило положение.
13. Система по п.1, в которой система управления использует статистический анализ для определения ориентации устройства для гигиены ротовой полости.
14. Система по п.1, в которой статистический анализ включает в себя анализ главных компонентов, иерархический кластерный анализ, регрессионный анализ или линейный дискриминатный анализ.
15. Система по п.14, в которой статистический анализ выполняется с использованием относительных изменений положения на основе эталонной системы координат, определяемой в ходе каждого сеанса чистки щеткой.
16. Система по п.15, в которой статистический анализ выполняется путем согласования данных от оптического датчика с калибровочными данными после того, как система управления определяет завершенный сеанс чистки щеткой.
17. Система по п.1, в которой система управления дополнительно определяет ориентацию устройства для гигиены ротовой полости посредством анализа данных от датчика движения.
18. Система по п.10, в которой датчик движения представляет собой гироскоп или акселерометр.
19. Система электронного устройства для гигиены ротовой полости для контроля чистки щеткой и соблюдения режима чистки щеткой, при этом система содержит:
устройство для гигиены ротовой полости, включающее в себя рукоятку и головку, причем головка включает в себя первый визуальных шаблон;
насадку, которая выполнена с возможностью прикрепления к рукоятке устройства для гигиены ротовой полости, причем насадка включает в себя второй визуальный шаблон, который отличается от первого визуального шаблона;
камеру для обнаружения визуальных данных, относящихся к первому и второму визуальным шаблонам;
память для хранения визуальных данных, выводимых камерой, причем память находится в ходе связи для передачи данных с камерой; и
систему управления, которая определяет относительное расстояние и направление перемещения положения устройства для гигиены ротовой полости на основе по меньшей мере визуальных данных, выводимых камерой.
20. Система по п.19, в которой головка включает в себя второй визуальный шаблон, отличный от первого визуального шаблона.
21. Система по п.19, в которой контроллер использует выходные данные от оптического датчика для определения оценочного окна расстояния, внутри которого устройство для гигиены ротовой полости изменило положение.
22. Система по п.19, в которой устройство для гигиены ротовой полости дополнительно включает в себя датчик движения, который выводит данные, относящиеся к ориентации устройства для гигиены ротовой полости, и в которой система управления рассчитывает ориентацию устройства для гигиены ротовой полости в пространстве дополнительно на основе выходных данных от оптического датчика.
23. Способ определения ориентации устройства для гигиены ротовой полости, при этом способ включает в себя:
запись, в ходе сеанса калибровки, калибровочных данных от оптического датчика, которые представляют изображение устройства для гигиены ротовой полости в фиксированной ориентации;
хранение калибровочных данных в памяти;
запись, в ходе сеанса использования, данных об использовании от оптического датчика; и
выполнение статистического анализа данных об использовании и калибровочных данных для определения по меньшей мере одной ориентации устройства для гигиены ротовой полости, при этом статистический анализ выполняют, используя регрессионный анализ или эталонное начальное положение во рту пользователя, записываемое в ходе сеанса использования.
24. Способ по п.23, в котором выполнение статистического анализа данных об использовании и калибровочных данных также включает в себя определение относительного перемещения положения устройства для гигиены ротовой полости.
25. Способ по п.23, в котором сеанс калибровки записывает данные, представляющие лицо пользователя.
26. Способ по п.25, в котором сеанс калибровки сравнивает размер визуального шаблона на устройстве для гигиены ротовой полости с размером лица пользователя.
27. Система электронного устройства для гигиены ротовой полости для контроля чистки щеткой и соблюдения режима чистки щеткой, при этом система содержит:
устройство для гигиены ротовой полости, включающее в себя рукоятку, головку и насадку, присоединяемую к концу рукоятки, причем насадка включает в себя первый шаблон;
базовую станцию, включающую в себя оптический датчик, выполненный с возможностью вывода визуальных данных, включающих изображение устройства для гигиены ротовой полости и пользователя;
датчик движения, выполненный с возможностью выводить данные движения, относящиеся к движению зубной щетки;
память для хранения данных, выводимых датчиком движения и в ходе связи для передачи данных с датчиком движения; и
систему управления, выполненную с возможностью определения положение головки устройства для гигиены ротовой полости во рту пользователя (i) посредством сравнения данных движения с ранее записанными калибровочными данными, используя статистический анализ, и (ii) посредством периодической корректировки дрейфа определения положения, используя выходные визуальные данные от оптического датчика.
28. Система гигиены ротовой полости для контроля чистки щеткой и соблюдения режима чистки щеткой, при этом система содержит:
устройство для гигиены ротовой полости, включающее в себя рукоятку и головку;
оптический датчик, выполненный с возможностью вывода визуальных данных, включающих изображение устройства для гигиены ротовой полости и пользователя;
память, содержащую машиночитаемую среду, содержащую машиновыполняемый код, имеющий сохраненные на нем команды для выполнения способа определения положения и ориентации зубной щетки; и
систему управления, связанную с памятью и включающую в себя процессор, выполненный с возможностью выполнять машиновыполняемый код для инициации определения процессором ориентации и положения устройства для гигиены ротовой полости посредством сравнения ранее записанных калибровочных данных с визуальными данными, выводимыми оптическим датчиком, с использованием статистического анализа, причем статистический анализ выполняется с использованием регрессионного анализа.
29. Система по п.28, в которой устройство для гигиены ротовой полости дополнительно включает в себя гироскоп, который выводит данные, относящиеся к изменениям ориентации устройства для гигиены ротовой полости, и в которой система управления определяет ориентацию устройства для гигиены ротовой полости дополнительно на основе выходных данных от гироскопа.
30. Система по п.28, в которой система управления также определяет относительные изменения положения устройства для гигиены ротовой полости, используя выходные данные от оптического датчика.
31. Система по п.30, в которой система управления использует выходные данные от оптического датчика для определения оценочного окна расстояния, внутри которого устройство для гигиены ротовой полости изменило положение.
32. Система по п.28, в которой система управления использует статистический анализ для определения ориентации устройства для гигиены ротовой полости.
33. Система по п.28, в которой статистический анализ включает в себя анализ главных компонентов, иерархический кластерный анализ, регрессионный анализ или линейный дискриминатный анализ.
34. Система по п.33, в которой статистический анализ выполняется, используя относительные изменения положения на основе эталонной системы координат, определяемой в ходе каждого сеанса чистки щеткой.
35. Система по п.33, в которой статистический анализ выполняется путем согласования данных от оптического датчика с калибровочными данными после того, как система управления определяет завершенный сеанс чистки щеткой.
36. Система по п.28, в которой система управления дополнительно определяет ориентацию устройства для гигиены ротовой полости посредством анализа данных от магнитометра, представляющих напряженность и направление магнитного поля земли.
37. Система по п.28, в которой система управления дополнительно определяет ориентацию устройства для гигиены ротовой полости посредством анализа данных движения от датчика движения, подключенного к устройству для гигиены ротовой полости.
38. Система по п.28, в которой устройство для гигиены ротовой полости содержит визуальный шаблон.
39. Система по п.28, в которой система управления определяет положение устройства для гигиены ротовой полости посредством идентификации ориентации продольной оси устройства для гигиены ротовой полости относительно рта на основе оптических данных, представляющих зубную щетку.
40. Система по п.39, в которой система управления определяет положение устройства для гигиены ротовой полости относительно рта пользователя на основе оптических данных, представляющих устройство для гигиены ротовой полости, и оптических данных, представляющих рот пользователя, выводимых оптическим датчиком, и комбинирует эту информацию с информацией об ориентации, определяемой на основании данных, выводимых гирометром, для идентификации того, какие из зубов пользователя чистятся щеткой.
41. Система по п.37, в которой данные от датчика движения представляют собой по меньшей мере данные ускорения или данные ориентации.
42. Постоянная машиночитаемая среда хранения, имеющая сохраненные на ней команды для выполнения способа, содержащего машиновыполняемый код, который при выполнении по меньшей мере одной машиной заставляет машину:
определять пространственное положение устройства для гигиены ротовой полости на основе по меньшей мере данных, выводимых оптическим датчиком, содержащим оптические данные, представляющие устройство для гигиены ротовой полости;
определять угловую ориентацию устройства для гигиены ротовой полости на основе по меньшей мере данных, выводимых датчиком движения; и
определять секцию зубов пользователя, чистящуюся с помощью щетки устройством для гигиены ротовой полости, посредством комбинирования информации о положении и ориентации, с использованием статистического анализа, причем статистический анализ выполняется с использованием регрессионного анализа.
43. Среда хранения по п.42, в которой секция зубов пользователя содержит внешнюю поверхность верхних моляров или внутреннюю поверхность нижних моляров.
44. Среда хранения по п.42, в которой секция зубов пользователя содержит внешнюю поверхность верхних резцов или внешнюю поверхность нижних резцов.
45. Среда хранения по п.42, в которой оптические данные, представляющие устройство для гигиены ротовой полости, содержат оптические данные, представляющие шаблон на зубной щетке.
46. Среда хранения по п.42, в которой данные, выводимые датчиком движения, представляют собой данные ориентации.
47. Среда хранения по п.42, в которой данные, выводимые датчиком движения, представляют собой данные ускорения.
| US 2014065588 A1, 06.03.2014 | |||
| US 2009215015 А1, 27.08.2009 | |||
| US 2015044629 A1, 12.02.2015 | |||
| DE 102011103301 A1, 06.12.2012 | |||
| WO 2014202438 A1, 24.12.2014. |

