Изобретение относится к устройствам и способам для добычи среды из скважин, в частности нефти, с обеспечением определения параметров среды.
Известно изобретение «Способ и система управления перемещением штока в системе откачки флюида из скважины» по патенту РФ №2381384 (МПК: F04B 49/06, F04B 47/02, дата приоритета: 13.10.2005, дата публикации: 10.02.2010). Из патентного документа известно, что длина хода плунжера может быть измерена экспериментально, например, при установке акселерометров на плунжере или может быть рассчитана двумя путями: с использованием математической модели движения плунжера на основании измерений поверхностной динамограммы, то есть перемещения и усилия полированного штока; и за счет применения теоретического метода, с использованием расчета движения полированного штока как функции скорости двигателя и с использованием анализа с прогнозированием, чтобы найти отклик плунжера на это движение. Общими признаками является наличие насоса, электродвигателя для добычи нефти (флюида).
Недостатком такого способа и устройства контроля и управления перемещением штока насоса является невозможность определить изменение свойств флюида (плотности, температуры).
Известно изобретение «Способ управления штанговым скважинным насосом» по патенту РФ № 2610857 (МПК: F04B 47/02, F04B 49/06, дата приоритета: 25.03.2016, дата публикации: 16.02.2017). Способ управления штанговым скважинным насосом с контролем заполнения скважины заключается в том, что измеряют ток питания асинхронного электродвигателя насоса, рассчитывают активную составляющую измеренного тока, формируют и запоминают эталонную диаграмму активной составляющей за цикл работы насоса, формируют текущие диаграммы указанной составляющей, вычисляют по выбранному критерию их отклонение от эталонной диаграммы и при превышении вычисленным отклонением порога останавливают электродвигатель на прогнозируемое время заполнения скважины, после чего возобновляют работу электродвигателя с контролем указанного превышения. Общими признаками является наличие скважинного насоса и электродвигателя.
Недостатком такого способа управления насосом является отсутствие возможности контроля изменения параметров среды флюида.
Известно изобретение «Станция управления насосной установкой нефтедобывающей скважины (варианты)» по патенту РФ № 2651651 (E21B 43/00, F04D 15/00, F04D 13/10, дата приоритета: 20.02.2017, дата публикации: 26.04.2017). Электрическая погружная насосная система содержит электрический привод, способный генерировать выходное электропитание с первым порядком чередования фаз. Причем электрический привод включает контроллер, принимающий сигналы о положении линейного электродвигателя; контроллер способен отслеживать сигналы о положении, определять разницу во времени между импульсами в сигналах о положении и вести подсчет импульсов в сигналах о положении. При этом, если разница во времени между последней парой последовательных импульсов в выходных сигналах превысит пороговое отклонение, а число импульсов в выходных сигналах по меньшей мере достигнет минимума, то контроллер обеспечивает реверсирование электропитания линейного электродвигателя системы ESP за счет подачи электропитания вторым порядком чередования фаз, который обратен первому порядку чередования фаз. Система ESP имеет электродвигатель, принимающий электрические сигналы от наземного оборудования. Принятые сигналы запускают электродвигатель, который, в свою очередь, приводит в действие насос, поднимающий нефть из скважины. Общими признаками является использование насоса, электродвигателя и наземной станции для добычи нефти.
Недостатком известной системы является невозможность определения свойств среды (температуры, плотности флюида) в процессе добычи.
Техническим результатом заявленного изобретения является обеспечение надежного определения параметров среды (в частности плотности, температуры), при упрощении установки и повышении ее надежности.
Технический результат достигается за счет того, что насосная установка включает наземную станцию управления, которая содержит:
- блок формирования рабочих напряжений (БФРН), включающий сетевой вход, низковольтный выход, нулевой силовой выход и силовой выход;
- генератор стабильного тока, силовой вход которого соединен с силовым выходом блока формирования рабочих напряжений, и включающий силовой выход;
- датчик тока, установленный на силовом выходе генератора стабильного тока;
- контроллер наземной станции управления, соединенный с датчиком тока и выполненный с возможностью замера длительности импульса датчика тока и вычисления плотности среды;
при этом БФРН и генератор стабильного тока наземной станции управления многожильным кабелем соединены с подземным оборудованием,
при этом подземное оборудование включает:
- плунжерный насос,
- погружной трехфазный линейный привод постоянного тока, соединенный с плунжерным насосом и включающий электродвигатель и соединенный с ним блок управления электродвигателем (БУ ЭД);
при этом погружной трехфазный линейный привод постоянного тока выполнен с возможностью работы в режиме БДПТ (бесконтактного двигателя постоянного тока) с самокоммутацией, а силовой вход БУ ЭД посредством многожильного кабеля соединен с силовым выходом генератора стабильного тока наземной станции управления, а нулевой силовой вход БУ ЭД с нулевым силовым выходом БФРН наземной станции управления, при этом низковольтный вход БУ ЭД соединен с низковольтным выходом БФРН.
За счет установки в наземной станции управления устройств (БФРН, генератора стабильного тока, датчика тока и контроллера), обеспечивающих получение и обработку сигналов импульса тока, в процессе нефтедобычи происходит одновременное получение сведений об изменении свойств добываемой среды (определение значения плотности). При этом из уровня техники известно расположение датчиков в скважине и получения с них данных о параметрах среды в процессе нефтедобычи, однако в этом случае при повышении температуры в скважине могут возникать серьезные ошибки измерения или электронная часть кодера, находящегося в подземной части может быть повреждена в результате воздействия высоких температур. При допустимых значениях температуры среды в скважине данные с датчиков (положения, температуры, давления), расположенных в скважине, могут дублировать сведения, полученные с датчика тока, расположенного в наземной системе управления с целью уточнения и необходимой корректировки (сопоставления) данных.
Технический результат достигается за счет того, что насосная установка включает наземную станцию управления, которая содержит:
- блок формирования рабочих напряжений (БФРН), включающий сетевой вход, низковольтный выход, нулевой силовой выход и силовой выход;
- генератор стабильного тока, силовой вход которого соединен с силовым выходом блока формирования рабочих напряжений, и включающий силовой выход;
- датчик тока, установленный на силовом выходе генератора стабильного тока;
- контроллер наземной станции управления, соединенный с датчиком тока и выполненный с возможностью замера силы тока и начального напряжения генератора стабильного тока и вычисления температуры среды по сопротивлению, определенному как соотношение начального напряжения (UR) к току нагрузки генератора стабильного тока при установке штока погружного трехфазного линейного привода постоянного тока в начальное положение с учетом температуры двигателя, и по глубине погружения трехфазного линейного привода постоянного тока,
при этом подземное оборудование включает:
- плунжерный насос,
- погружной трехфазный линейный привод постоянного тока, соединенный с плунжерным насосом и включающий электродвигатель и соединенный с ним блок управления электродвигателем;
при этом погружной трехфазный линейный привод постоянного тока выполнен с возможностью работы в режиме БДПТ (бесконтактного двигателя постоянного тока) с самокоммутацией, а силовой вход блока управления посредством многожильного кабеля соединен с силовым выходом генератора стабильного тока наземной станции управления, а нулевой силовой вход с нулевым силовым выходом блока формирования рабочих напряжений (БФРН) наземной станции управления, при этом низковольтный вход БУ ЭД соединен с низковольтным выходом БФРН.
За счет установки в наземной станции управления устройств (БФРН, генератора стабильного тока, датчика тока и контроллера), обеспечивающих получение и обработку сигналов импульса тока, в процессе нефтедобычи происходит одновременное получение сведений об изменении свойств добывающей среды (определение значения температуры добываемого флюида). Причем полученные данные являются достоверными, т.к. датчик тока находится на поверхности, а не в скважине, в которой повышение температуры возможно до 400 ºС, что значительно снижает точность полученных данных. При этом устройство является достаточно простым, т.к. не требует установки дополнительных датчиков, прокладки дополнительных кабелей и пр. Получение достоверных данных обеспечивается простым комплектом устройств наземной станции управления.
Существует вариант насосной установки, в которой многожильный кабель выполнен четырехжильным, при этом блок формирования рабочих напряжений (БФРН) выполнен с возможностью формирования постоянного низковольтного напряжения на своем низковольтном выходе и соединен с низковольтным входом блока управления электродвигателем посредством
первой жилы (постоянного низковольтного напряжения) и
второй жилы (нулевой низковольтного напряжения) многожильного кабеля;
- нулевой силовой выход БФРН соединен с нулевым силовым входом блока управления электродвигателя посредством третьей жилы;
силовой выход генератора стабильного тока соединен с силовым входом блока управления электродвигателем посредством четвертой жилы многожильного кабеля,
причем в подземном оборудовании нулевые шины (вторая и третья жилы) гальванически соединены в блоке управления электродвигателем.
Существует вариант насосной установки, в которой многожильный кабель выполнен трехжильным, подземное оборудование дополнительно включают развязывающий конденсатор, развязывающий трансформатор и выпрямитель, при этом блок формирования рабочих напряжений (БФРН) выполнен с возможностью формирования переменного низковольтного напряжения на своем низковольтном выходе и соединен с низковольтным входом блока управления электродвигателем посредством
первой жилы многожильного кабеля, соединенной с развязывающим трансформатором через развязывающий конденсатор, первичная обмотка которого соединена с первой и второй жилой многожильного кабеля, а вторичная обмотка гальванически развязана и соединена с выпрямителем, при этом отрицательный вывод выпрямителя соединен со второй жилой силовой нулевой шины, при этом положительный и отрицательный выводы выпрямителя подключены к низковольтному входу блока управления электродвигателем;
силовой нулевой выход БФРН соединен с силовым нулевым входом блока управления электродвигателя посредством второй жилой;
выход генератора стабильного тока соединен с силовым входом блока управления электродвигателем посредством третьей жилы многожильного кабеля.
Существует вариант насосной установки, в которой генератор стабильного тока выполнен регулируемым и имеет регулирующий вход, контроллер имеет регулирующий выход, который соединен с регулирующим входом генератора стабильного тока, при этом контроллер наземной станции управления выполнен с возможностью регулировки величины тока, времени пуска генератора стабильного тока. В случае изменения плотности среды при использовании насосной установки по такому варианту исполнения дополнительно обеспечивается возможность управления скорости хода штока, что необходимо для повышения продолжительности работы насосной установки с сохранением оптимального режима добычи.
Существует вариант осуществления насосной установки, в которой блок управления электродвигателем выполнен с возможностью переключения хода штока погружного трехфазного линейного привода постоянного тока на обратный при получении фронта напряжения при пуске генератора стабильного тока, при этом БУ ЭД задает направление движения штока погружного трехфазного линейного привода постоянного тока в зависимости от срабатывания концевого датчика, установленного у верхнего конца хода штока погружного трехфазного линейного привода постоянного тока. В таком варианте исполнения насосной установки дополнительно обеспечивается возможность управления длительностью пауз в концевых положениях штока. Управление длительностью пауз штока обеспечивает снижение риска перегрева установки, что положительно влияет на продолжительность ее эксплуатации. Управление паузами в концевых положениях штока может быть обеспечено (задаваться) автоматически.
Существует вариант насосной установки, в которой наземная станция управления включает декодер, подземное оборудование оснащено по крайней мере одним датчиком концевого положения привода, включает кодер, соединенный с датчиком и силовыми жилам многожильного кабеля, выполненного с возможностью передачи цифровой информации по силовым жилам, при этом кодер соединен с декодером наземной станции управления, который соединен с контроллером наземной станции управления.
Существует вариант насосной установки, в которой контроллер наземной станции управления выполнен с возможностью автоматической регулировки времени переключения шока привода погружного трехфазного линейного привода постоянного тока на обратный ход.
Существует вариант насосной установки, в которой генератор стабильного тока выполнен с возможностью генерации тока (Iн) 100 А.
Существует вариант насосной установки, в которой подземное оборудование дополнительно оснащено по крайней мере одним датчиком температуры, соединенным с кодером.
Существует вариант насосной установки, в которой подземное оборудование дополнительно оснащено по крайней мере одним датчиком давления, соединенным с кодером.
Технический результат достигается за счет того, что способ определения плотности среды скважины насосной установкой включает:
- добычу нефти насосной установкой, включающей плунжерный насос, погружной трехфазный линейный привод постоянного тока, работающий в режиме БДПТ с самокоммутацией, и наземную станцию управления, осуществляющую питание погружного трехфазного линейного привода постоянного тока от генератора стабильного тока, на силовом выходе которого установлен датчик тока;
- замер длительности импульса тока при полном ходе штока плунжерного насоса при помощи датчика тока;
- вычисление контроллером наземной станции управления плотности среды по длительности импульса тока при полном ходе штока плунжерного насоса.
При этом технически результат достигается за счет использования способа определения плотности среды скважины насосной установкой, варианты конструкции которой описаны выше.
Существует вариант способа определения плотности среды скважины насосной установкой, при котором замер длительности импульса тока при полном ходе штока плунжерного насоса при помощи датчика тока осуществляется контроллером.
Существует вариант способа определения плотности среды скважины насосной установкой, при котором замер длительности импульса тока при полном ходе штока плунжерного насоса при помощи датчика тока происходит с использованием ПЭВМ (ноутбуком, планшетом, компьютером и пр.).
Существует вариант способа определения плотности среды скважины насосной установкой, при котором контроллер наземной станции управления выполнен с возможностью автоматической регулировки времени переключения шока привода погружного трехфазного линейного привода постоянного тока на обратный ход.
Технический результат достигается за счет того, что способ определения температуры среды скважины насосной установкой, который включает:
- добычу нефти насосной установкой, включающей плунжерный насос, погружной трехфазный линейный привод постоянного тока, работающий в режиме БДПТ с самокоммутацией, и наземную станцию управления, осуществляющую питание погружного трехфазного линейного привода постоянного тока от генератора стабильного тока, на силовом выходе которого установлен датчик тока;
- замер силы тока при помощи датчика тока на силовом выходе генератора стабильного тока и замер начального напряжения на том же выходе при установке штока погружного трехфазного линейного привода постоянного тока в начальное положение;
- вычисление температуры среды по сопротивлению, определенному как соотношение начального напряжения (UR) к току нагрузки генератора стабильного тока при установке штока погружного трехфазного линейного привода постоянного тока в начальное положение с учетом температуры двигателя, и по глубине погружения трехфазного линейного привода постоянного тока.
При этом технически результат достигается за счет использования способа определения температуры среды скважины насосной установкой, варианты конструкции которой описаны выше.
Существует вариант способа определения температуры среды скважины насосной установкой, при котором вычисление температуры среды осуществляется контроллером.
Существует вариант способа определения температуры среды скважины насосной установкой, при котором вычисление температуры среды осуществляется ПЭВМ (ноутбуком, компьютером, планшетом и пр.).
Существует вариант способа определения температуры среды скважины насосной установкой, при котором начальное напряжение (UR) измеряют 3-5 мс.
Существует вариант способа определения температуры среды скважины насосной установкой, при котором контроллер наземной станции управления выполнен с возможностью автоматической регулировки времени переключения шока привода погружного трехфазного линейного привода постоянного тока на обратный ход.
Заявленное изобретение поясняется следующими фигурами.
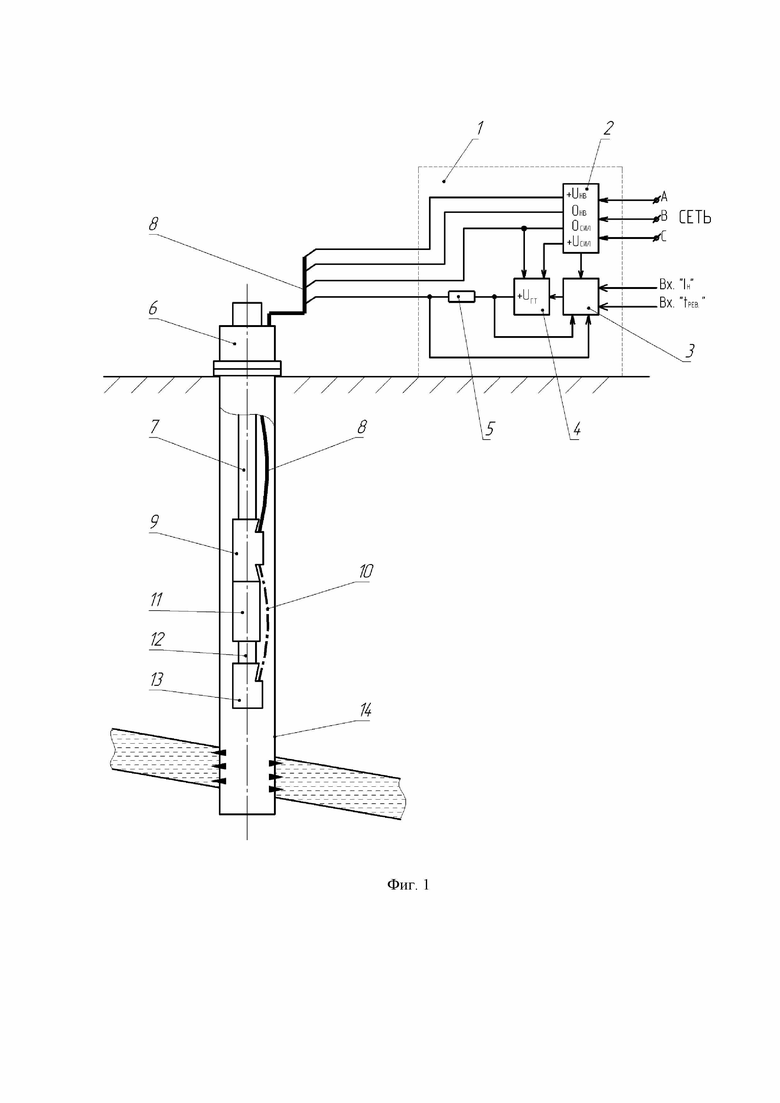
Фиг. 1 - структурная схема насосной установки по первому варианту (с четырех жильным кабелем),
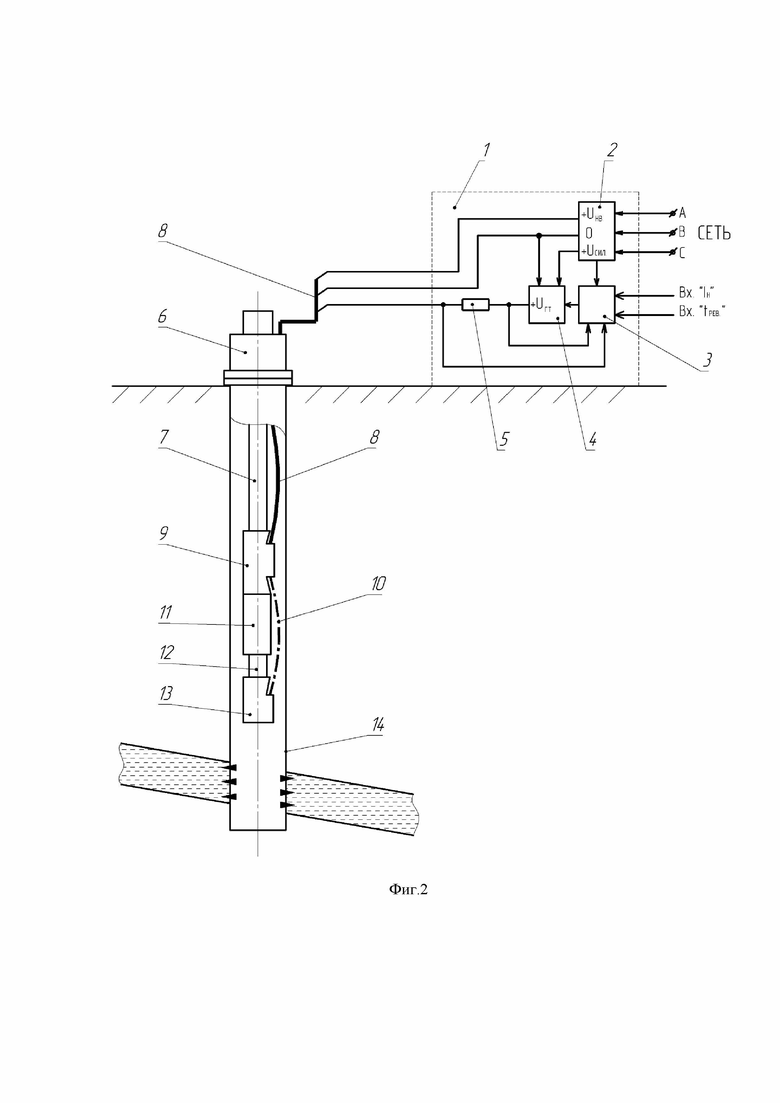
фиг. 2 - структурная схема насосной установки по второму варианту (с трехжильным кабелем), на которых
1 - наземная станция управления;
2 - блок формирования рабочих напряжений (БФНР);
3 - контроллер;
4 - генератор стабильного тока;
5 - датчик тока;
6 - устьевая арматура;
7 - насосно-компрессорные трубы;
8 - многожильный кабель;
9 - блок управления электродвигателем (БУ ЭД);
10 - кабель электродвигателя для силового питания;
11 - плунжерный насос;
12 - блок датчиков положения штока электродвигателя;
13 - электродвигатель (линейный);
14 - эксплуатационная колонна.
Сеть А, В, С - трехфазная сеть, например 380В.
Iн - ток нагрузки генератора стабильного тока;
tрев - время стоянки электродвигателя при реверсе в обесточенном состоянии (время реверса штока);
Uнв - напряжение низковольтное;
0нв - потенциалы нулевых точек низковольтного напряжения;
0сил - потенциалы нулевых точек силового напряжения;
Uсил -силовое напряжение;
Uгт - входное напряжение генератора стабильного тока.
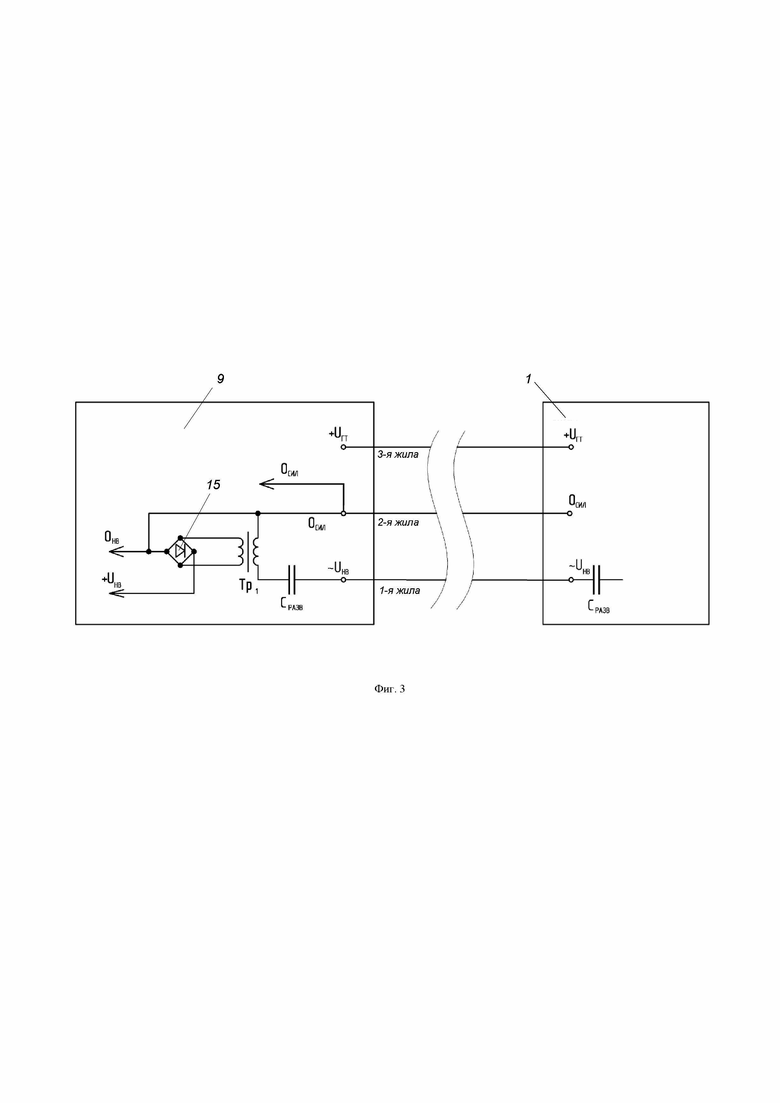
Фиг. 3 - схема низковольтной развязки в случае трехжильного кабеля, на которой
Uнв - низковольтное напряжение, например 27В;
Сразв - развязывающий конденсатор;
Тр1 - развязывающий трансформатор;
15 - выпрямитель.
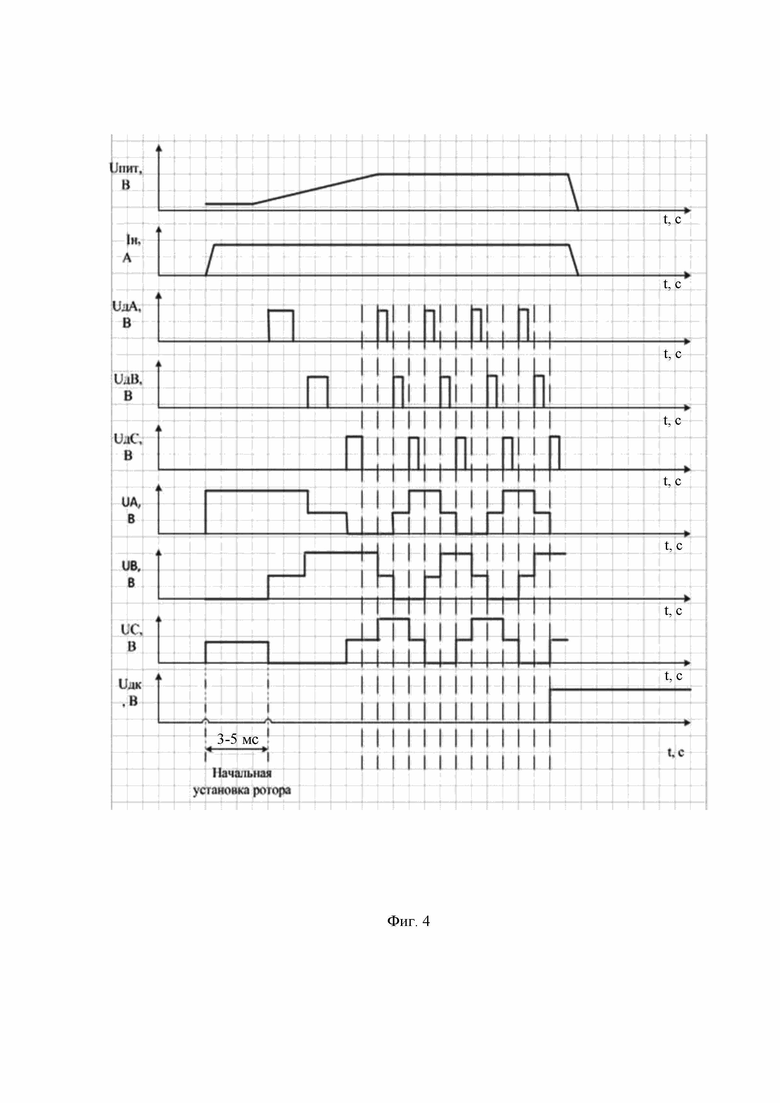
Фиг 4 - временные диаграммы, на которых
Uпит - питание на многожильном кабеле, соответствующее Uгт;
UдА - датчик переключения фазы А;
UдВ - датчик переключения фазы В;
UдС - датчик переключения фазы С;
UА - напряжение на фазе А;
UВ - напряжение на фазе В;
UС - напряжение на фазе С;
Uдк - напряжение на концевом датчике.
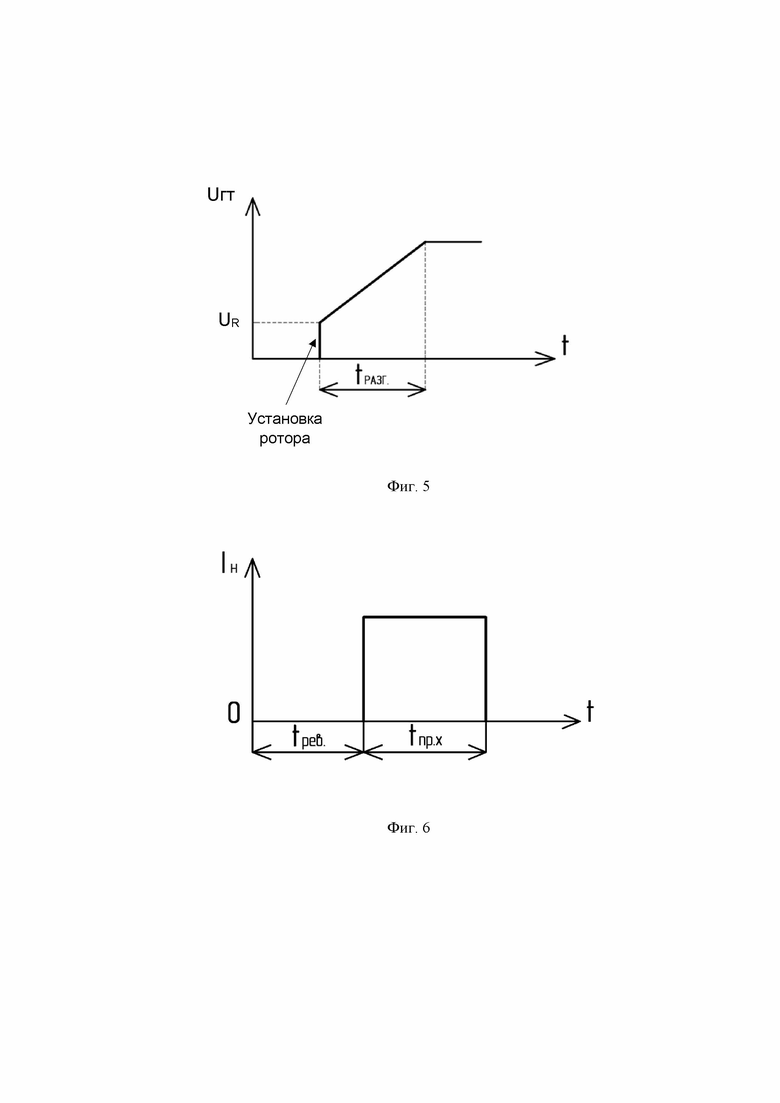
Фиг. 5 - упрощенная диаграмма, поясняющая определение температуры среды.
Фиг. 6 - упрощенная диаграмма, поясняющая определение плотности среды.
Насосная установка (фиг. 1, 2) включает наземную станцию управления 1, которая содержит: блок формирования рабочих напряжений (БФРН) 2, включающий сетевой вход, низковольтный выход, нулевой силовой выход и силовой выход; генератор стабильного тока 4, силовой вход которого соединен с силовым выходом блока формирования рабочих напряжений 2, и включающий силовой выход. Наземная станция управления 1 включает датчик тока 5, установленный на силовом выходе генератора стабильного тока 4, контроллер 3 наземной станции управления 1, соединенный с датчиком тока и выполненный с возможностью замера длительности импульса датчика тока 5 и вычисления плотности среды. При этом БФРН 2 и генератор стабильного тока 4 наземной станции управления 1 многожильным кабелем 8 соединены с подземным оборудованием. Подземное оборудование включает: плунжерный насос 11, погружной трехфазный линейный привод постоянного тока (на фиг. 1 не представлен), соединенный с плунжерным насосом 11 и включающий электродвигатель 13 и соединенный с ним блок управления электродвигателем (БУ ЭД) (на фиг. 1 не представлен). Погружной трехфазный линейный привод постоянного тока выполнен с возможностью работы в режиме БДПТ (бесконтактного двигателя постоянного тока) с самокоммутацией. Силовой вход блока управления посредством многожильного кабеля 8 соединен с силовым выходом генератора стабильного тока 4 наземной станции управления 1, а нулевой силовой вход с нулевым силовым выходом блоком формирования рабочих напряжений (БФРН) 2 наземной станции управления 1, при этом низковольтный вход БУ ЭД соединен с низковольтным выходом БФРН 2. В одном из вариантов насосной установки генератор стабильного тока 4 выполнен регулируемым и имеет регулирующий вход, контроллер 3 имеет регулирующий выход, который соединен с регулирующим входом генератора стабильного тока 4. При этом контроллер 3 наземной станции управления 1 выполнен с возможностью регулировки величины тока, времени пуска генератора стабильного тока 4.
Многожильный кабель 8 может быть выполнен четырехжильным (фиг. 1). При этом блок формирования рабочих напряжений (БФРН) 2 выполнен с возможностью формирования постоянного низковольтного напряжения на своем низковольтном выходе и соединен с низковольтным входом блока управления электродвигателем посредством первой жилы (постоянного низковольтного напряжения) и второй жилы (нулевой низковольтного напряжения) многожильного кабеля. А нулевой силовой выход БФРН 2 соединен с нулевым силовым входом блока управления электродвигателя посредством третьей жилы. Силовой выход генератора стабильного тока 4 соединен с силовым входом блока управления электродвигателем посредством четвертой жилы многожильного кабеля. Причем в подземном оборудовании нулевые шины (вторая и третья жилы) гальванически соединены в блоке управления электродвигателем.
Многожильный кабель 8 насосной установки может быть выполнен трехжильным (фиг. 2, 3). Подземное оборудование дополнительно включают развязывающий конденсатор Сразв, развязывающий трансформатор Тр1 и выпрямитель 15. При этом блок формирования рабочих напряжений (БФРН) 2 выполнен с возможностью формирования переменного низковольтного напряжения на своем низковольтном выходе и соединен с низковольтным входом блока управления электродвигателем посредством первой жилы многожильного кабеля 8, соединенной с развязывающим трансформатором Тр1 через развязывающий конденсатор Сразв, первичная обмотка которого соединена с первой и второй жилой многожильного кабеля 8, а вторичная обмотка гальванически развязана и соединена с выпрямителем 15. При этом отрицательный вывод выпрямителя 15 соединен со второй жилой силовой нулевой шины, при этом положительный и отрицательный выводы выпрямителя 15 подключены к низковольтному входу блока управления электродвигателем. Силовой нулевой выход БФРН 2 соединен с силовым нулевым входом блока управления электродвигателя посредством второй жилой. Выход генератора стабильного тока 4 соединен с силовым входом блока управления электродвигателем посредством третьей жилы многожильного кабеля.
Описание работы насосной установки ведется по структурным схеме, представленной на фиг. 1.
Основная задача добычи среды из скважины решается в заявленной насосной установки и при помощи способов следующим образом.
После подачи сетевого напряжения на наземную станцию управления 1, включается блок формирования рабочих напряжений 2, который подает питание на генератор стабильного тока 4 и контроллер 3 наземной станции управления, а также напряжение Uнв на блок управления электродвигателем 9 по двум низковольтным жилам четырехжильного кабеля 8 для включения низковольтных узлов блока управления (контроллеры, датчики, модемы). Происходит начальная установка контроллера 3 станции управления и контроллера блока управления электродвигателем. При отсутствии отказов контроллер 3 наземной станции управления готов к приему данных.
В случае наличия регулировок оператором наземной станции управления 1 по входным цепям контроллера 3 станции управления вводятся значения тока нагрузки электродвигателя Iн и времени стоянки плунжера (штока) электродвигателя при реверсе tрев. При отсутствии регулировок Iн и tрев задаются конструктивно (подбором соответствующих электрических компонентов генератора 4 стабильного тока и/или контроллера 3 станции управления).
Далее оператором подается команда на запуск насосной установки.
После подачи пускового сигнала, на выходе генератора стабильного тока 4 появляется напряжение Uгт, которое по двум жилам четырехжильного кабеля 8 поступает на блок управления электродвигателем 9.
При появлении высоковольтного напряжения на блоке управления электродвигателем 9, его контроллер запускает жесткий (без допуска изменений в процессе функционирования) алгоритм работы линейного электродвигателя 13.
Линейный электродвигатель 13 представляет собой трехфазную линейную вентильную электрическую машину с ротором на постоянных магнитах. Статор электродвигателя выполнен по схеме «звезда».
Линейный электродвигатель 13 работает в режиме БДПТ (бесконтактного двигателя постоянного тока) с самокоммутацией, т.е. при движении ротора в каждый момент времени через две фазы статора (например, А и В) протекает постоянный ток, третья фаза (С) находится в состоянии обрыва. При исполнении шага ротора, происходит перекоммутация фаз, ток протекает через две другие фазы (например, А и С, фаза В - в обрыве). Перекоммутация фаз происходит по сигналам датчика положения ротора UдА, UдВ, UдС (датчики переключения фаз) - режим самокоммутации.
Физически переключение фаз электродвигателя может осуществляться тремя полумостами блока управления 9 по сигналам собственного контроллера, формирующего временную диаграмму работы по жесткому алгоритму, и сигналам датчиков положения ротора, которые конструктивно привязаны к обмоткам фаз статора.
Контроллер (на фиг. не показан) блока управления 9 электродвигателем формирует напряжения на фазах электродвигателя для начальной установки положения штока. Далее происходит разгон ротора в соответствии с временной диаграммой (фиг. 4.) и осуществляется движение ротора в сторону концевого датчика. Переключение фаз электродвигателя 13 производится контроллером блока управления 9 по командам от датчиков положения 12.
При заходе штока электродвигателя 13 в концевой датчик (блок датчиков положения штока электродвигателя 12) формируется сигнал Uдк (фиг. 4.) в контроллере блока управления электродвигателем 9, который отключает полумосты и снимает ток с фаз линейного электродвигателя. Прекращение потребления тока по цепи Uгт приводит к нулевому значению сигнала датчика тока 5, т.е. к окончанию токового импульса генератора стабильного тока 4, что прекращает подачу управляющих импульсов на вход генератора стабильного тока 4 и снимает силовое напряжение с блока управления электродвигателем 9.
Внутренний таймер контроллера станции управления 3 начинает отсчет времени стоянки при реверсе tрев., значение которого задано оператором или конструктивно.
По истечении времени tрев. контроллер 2 наземной станции управления выдает сигнал на включение генератора стабильного тока 4.
Контроллер блока управления электродвигателем при возникновении напряжения в соответствующей жиле кабеля от включенного генератора стабильного тока 4 анализирует находится ли шток электродвигателя 13 в концевом датчике (блоке датчиков положения 12 штока электродвигателя). Анализ происходит по наличию сигнала Uдк (фиг. 4). Если шток электродвигателя 13 находится в концевом датчике, контроллер блока управления электродвигателем включает внутренний алгоритм режима реверса, осуществляя разгон и реверсивное движение штока плунжерного насоса.
По истечении n импульсов датчиков положения штока двигателя (количество импульсов соответствует номинальной длине хода штока) контроллер блока управления электродвигателем снимает ток с фаз линейного электродвигателя 13, после чего происходит отключение генератора стабильного тока 4, выдержка в течение времени tрев. и пуск электродвигателя 13 в режиме движения к концевому датчику.
Работа остальных элементов структурной схемы при реверсе, полностью соответствует работе при прямом ходе штока.
Ток нагрузки электродвигателя 13 (Iн) определяется значением напряжения на выходе генератора стабильного тока 4, которое может формироваться управляющими импульсами контроллера 3 наземной станции управления 1 на входе генератора стабильного тока 4.
Ток нагрузки электродвигателя 13 (Iн) контролируется датчиком тока 5 наземной станции управления 1, сигнал которого подается на контроллер 3 наземной станции управления, где происходит сравнение с заданным входным значением Iн.
Постоянство значения тока нагрузки электродвигателя 13 (Iн) при движении штока плунжерного насоса 11 может достигаться изменением скважности управляющих импульсов на входе генератора стабильного тока 4 по отклонению Iн электродвигателя 13 от заданного значения.
При разгоне штока электродвигателя 13 изменяется противоЭДС, что приводит к автоматическому увеличению значения напряжения на выходе генератора стабильного тока 4. При выходе на номинальную скорость значение напряжения стабилизируется.
Передача низковольтного напряжения по трехжильному кабелю осуществляется следующим образом.
При отсутствии тока Iн электродвигателя (режим стоянки двигателя при реверсе), потенциалы нулевых точек силового напряжения 0сил. блока управления 9 электродвигателем и 0сил. наземной станции управления 1 равны.
При включении электродвигателя по шине 0сил. трехжильного кабеля, соединяющей блок управления 9 электродвигателем и наземную станцию управления 1, протекает ток Iн, вызывающий падение напряжения на ней до сотен вольт из-за электрического сопротивления многожильного кабеля 8, определяемого глубиной погружения плунжерного насоса.
Таким образом, потенциалы нулевых точек силового напряжения 0сил. блока управления 9 электродвигателем и 0сил. наземной станции управления 1 при протекании тока Iн имеют различные значения, что вызывает подброс напряжения по нулевой шине.
Подброс напряжения исключает возможность передачи постоянного низковольтного напряжения от наземной станции управления 1 в блок управления 9 электродвигателем относительно нулевой шины, как в четырехжильном кабеле.
Для компенсации подброса напряжения по жиле Uнв трехжильного кабеля относительно нулевой шины 0сил. подается переменное напряжение через развязывающий конденсатор Сразв., которое приходит на трансформатор блока управления 9 электродвигателем. Напряжение вторичной обмотки трансформатора выпрямляется диодным мостом, формируя постоянное напряжение питания низковольтных узлов.
Для корректной работы узлов блока управления 9 электродвигателем потенциалы нулевых точек силового напряжения 0сил. и низковольтного напряжения 0нв должны быть равны, поэтому отрицательный вывод выпрямителя соединен с точкой 0сил. в блоке управления 9 электродвигателя.
Определение параметров среды при помощи насосной установки осуществляется следующим образом.
Усилие, развиваемое электродвигателем 13 при питании стабильным током, постоянно и зависит от значения Iн. Усилие сопротивления ходу штока плунжерного насоса зависит от плотности среды при постоянной глубине положения подземного оборудования.
Таким образом, скорость движения штока плунжерного насоса 11 зависит от плотности среды скважины.
При постоянстве хода штока плунжерного насоса 11, время полного хода пропорционально его скорости, т.е. плотности среды скважины.
Время полного хода штока плунжерного насоса 11 соответствует длительности токового импульса датчика тока 5 наземной станции управления 1 и определяется плотностью среды скважины. Полная остановка наземной станции управления 1 происходит при снятии низковольтного напряжения с блока управления электродвигателем 9 и контроллера 3 станции управления 1.
В общем виде напряжение на выходе генератора стабильного тока 4 наземной станции управления 1 при выходном токе Iн не равным 0 определяется по формуле:
Uгт = Iн × (2Rф + 2Rк ) + Uэдс, где (1)
Uгт - выходное напряжение генератора стабильного тока;
Iн - ток нагрузки генератора стабильного тока:
Rф - активное сопротивление фазы линейного электродвигателя;
Rк - активное сопротивление жилы кабеля, соединяющего станцию управления с блоком управления электродвигателем:
Uэдс - противоЭДС линейного электродвигателя.
Учитывая, что Uэдс зависит от скорости движения штока электродвигателя, график временной зависимости напряжения Uгт при разгоне ротора будет иметь форму, представленную на фиг. 5. На фиг. 5 представлен начальный отрезок выходного напряжения (Uпит - на фиг. 4), являющийся начальным напряжением (UR).
В начальный момент работы генератора тока, происходит уставка (установка) в начальное положение штока (ротора) линейного двигателя в исходное положение без дальнейшего движения в течении 3-5мс. При этом противоЭДС на фазах электродвигателя отсутствует. Тогда измеренное в течении 3 мс начальное напряжение UR на графике фиг. 5 равно:
UR = Iн × (2Rф + 2Rк) (2).
При этом можно измерять начальное напряжение (UR) в течение другого периода времени (т.е. не в течении 3 мс), но в этом случае необходимо учитывать реактивное сопротивление, что может быть выполнено специалистом.
Сопротивление Rк постоянно для конкретной скважины и определяется длиной (глубиной погружения трехфазного линейного привода постоянного тока) и погонным сопротивлением жилы кабеля, соединяющего станцию управления с блоком управления электродвигателем, что дает возможность введения константы в контроллер станции управления для исключения влияния сопротивления кабеля на измеряемый параметр.
Тогда значение измеренного контроллером напряжения генератора тока принимает вид:
Uконтр. = UR - Iн × 2Rк = Iн ×2Rф (3)
Зависимость сопротивления от температуры определяется выражением:
Rt = R20{1+TKR×(t-20)}, где (4)
Rt - сопротивление при температуре t;
R20 - сопротивление при температуре +20°C;
TKR - температурный коэффициент сопротивления (для меди - 0,004).
Сопротивление фаз электродвигателя при температуре +20°C постоянно и определяется КД.
Тогда температура объекта определяется из формулы (4):
t = Rt-R20 / 0,004R20+20 (5)
Для определения температуры обмоток фазы линейного электродвигателя в формулу (5) вместо Rt подставляется значение сопротивления Rф, полученное при измерении Uконтр.
Значение Rф определяется из формулы (3):
Rф = Uконтр. / 2 Iн = UR-Iн × 2Rк
В контроллере измеряется UR и вводится поправка: Iн × 2Rк.
Поясним на примере:
R20 - сопротивление фазы линейного двигателя по КД - 0.06 Ом;
заданное значение Iн =100 А;
измеренное значение Uконтр.= 20В.
Из формулы (3) получаем Rф = 0,1 Ом.
Из формулы (5) получаем t=200°C.
Таким образом, определили температуру фаз линейного двигателя равной 200°C.
При дополнительном построении эмпирического или расчетного графика зависимости температуры перегрева двигателя от тока нагрузки, возможно определение температуры среды скважины.
Определяем по графику температуру перегрева двигателя при токе 100А, например 80°C.
Окончательно определяем температуру среды как разность температур фаз и перегрева двигателя равной 120°C.
Простой алгоритм определения температуры среды и фаз электродвигателя, работающего в режиме БДПТ с самокоммутацией от генератора тока, позволяет его реализацию в контроллере наземной станции управления для оперативного контроля без дополнительных аппаратных затрат.
Вычисление плотности среды ведется с использованием значений параметров, приведенных на диаграмме фиг. 6. где:
Iн - стабильный тол линейного электродвигателя;
tпр.х - время прямого хода штока плунжерного насоса (вверх);
tрев.- время стоянки электродвигателя при реверсе в обесточенном состоянии.
При питании линейного электродвигателя от генератора стабильного тока, усилие на штоке плунжерного насоса (Fш) постоянно и зависит только от значения Iн.
При работе электродвигателя в режиме самокоммутации скорость перемещения ротора (υш) электродвигателя зависит от усилия на штоке плунжерного насоса.
В общем виде, при постоянстве силы Fш и начальной нулевой скорости движения штока, ускорение (α) определяется по формуле:
α = υш / tпр.х (6).
Полный ход штока (Sш) определяется по формуле:
Sш = α (tпр.х)2 /2 (7)
Усилие на штоке (Fш) в общем виде равно:
Fш = ⅿ α , где (8)
ⅿ - масса, присоединенная к штоку плунжерного насоса.
Масса, присоединенная к штоку плунжерного насоса, складывается из масс ротора электродвигателя и штока плунжерного насоса, а также из массы среды в полости насосно-компрессорных труб (НКТ) скважины. В дальнейших выводах суммой масс ротора электродвигателя и штока плунжерного насоса пренебрегаем.
Масса среды НКТ скважины может быть выражена через плотность среды:
ⅿ = ρV, где (9)
ρ - плотность среды;
V - объем среды.
Из формул (8) и (9) определяем ускорение:
α = Fш / ρV (10).
Из формулы (7) определяем время tпр.х :
tпр.х = √2Sш /√α (11).
Возводим обе части выражения (11) в квадрат:
tпр.х2 = 2 Sш /α (12).
Подставим в формулу (12) выражение для α (10):
tпр.х2 = 2 Sш ρV / Fш (13).
Из формулы (13) окончательно определяем зависимость плотности среды скважины ρ от времени прямого хода штока плунжерного насоса tпр.х :
ρ = tпр.х2 Fш / 2 Sш V (14).
При работе насосной установки контроллер 3 наземной станции управления 1 производит измерение времени полного хода штока по длительности токовой посылки Iн от датчика тока 5. Это позволяет осуществлять оперативный мониторинг плотности среды скважины, производя вычисления по формуле (14) контроллером 3 наземной станции управления 1.
Для конкретной скважины значения длины хода штока Sш и объема среды V постоянны и определяются расчетным путем.
Зависимость усилия на штоке насоса Fш от Iн постоянна для конкретной скважины и определяется эмпирически.
После определения для конкретной скважины значений Sш и V, а также зависимости Fш от Iн, параметры вводятся в контроллер 3 наземной станции управления 1 в виде констант, после чего выражение (14) принимает вид:
ρ = А×tпр.х2, где (15)
А - введенные в контроллер 3 наземной станции управления 1 константы.
Приведенные выше выводы подтверждаем примером.
Допустим, что пведенные в контроллер 3 параметры определяют, что при токе Iн = 100А, константа А = 0,8 г/см3с2.
Измеренное значение tпр.х = 1,2с
Тогда плотность определяется как:
ρ = А×tпр.х2 = 0,8 × (1,2)2 = 1,15 г/см3.
Простой алгоритм определения плотности среды скважины при работе электродвигателя от генератора стабильного тока 4, позволяет его реализацию в контроллере 3 наземной станции управления 1 для оперативного контроля без дополнительных аппаратных затрат.
Таким образом, заявленное изобретение обеспечивает надежное определение параметров среды (в частности плотности, температуры) при упрощении установки и повышении ее надежности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система линейной электропогружной насосной установки | 2020 |
|
RU2747295C1 |
| Установка плунжерная с линейным двигателем | 2024 |
|
RU2837176C1 |
| Скважинная насосная установка | 2015 |
|
RU2615775C1 |
| Станция управления насосной установкой нефтедобывающей скважины (варианты) | 2017 |
|
RU2651651C2 |
| ПОГРУЖНАЯ НАСОСНАЯ УСТАНОВКА С ЛИНЕЙНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ, НАСОСОМ ДВОЙНОГО ДЕЙСТВИЯ И СПОСОБ ЕЁ ЭКСПЛУАТАЦИИ | 2017 |
|
RU2677773C2 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ ЛИНЕЙНЫМ ДВИГАТЕЛЕМ КОНЦЕВЫХ УПОРОВ | 2016 |
|
RU2652266C2 |
| ПОГРУЖНАЯ БЕСШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 2019 |
|
RU2701653C1 |
| СПОСОБ РАЗРУШЕНИЯ ПАРАФИНОВЫХ, ГИДРАТНЫХ, ГИДРАТОПАРАФИНОВЫХ И ЛЕДЯНЫХ ОТЛОЖЕНИЙ В ЭКСПЛУАТАЦИОННЫХ СКВАЖИНАХ ДЛЯ ПОДДЕРЖАНИЯ ИХ РАБОЧЕГО РЕЖИМА | 2017 |
|
RU2655265C1 |
| СПОСОБ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ИЛИ ПООЧЕРЕДНОЙ ДОБЫЧИ ПЛАСТОВОГО ФЛЮИДА ИЗ СКВАЖИН МНОГОПЛАСТОВЫХ МЕСТОРОЖДЕНИЙ С ПРЕДВАРИТЕЛЬНОЙ УСТАНОВКОЙ ПАКЕРОВ | 2014 |
|
RU2552555C1 |
| УСТАНОВКА ЭЛЕКТРОПОГРУЖНОГО ШЕСТЕРЕННОГО НАСОСА | 2018 |
|
RU2746292C2 |
Изобретение относится к устройствам и способам для добычи среды из скважин, в частности нефти, с обеспечением определения параметров среды. Насосная установка включает: блок формирования рабочих напряжений (БФРН), включающий сетевой вход, низковольтный выход, нулевой силовой выход и силовой выход; генератор стабильного тока, силовой вход которого соединён с силовым выходом блока формирования рабочих напряжений и включающий силовой выход; датчик тока, установленный на силовом выходе генератора стабильного тока; контроллер наземной станции управления, соединенный с датчиком тока и выполненный с возможностью замера длительности импульса датчика тока и вычисления плотности среды; при этом БФРН и генератор стабильного тока наземной станции управления многожильным кабелем соединены с подземным оборудованием, при этом подземное оборудование включает: плунжерный насос, погружной трёхфазный линейный привод постоянного тока, соединенный с плунжерным насосом и включающий электродвигатель и соединенный с ним блок управления электродвигателем (БУ ЭД); при этом погружной трёхфазный линейный привод постоянного тока выполнен с возможностью работы в режиме БДПТ (бесконтактного двигателя постоянного тока) с самокоммутацией, силовой вход БУ ЭД посредством многожильного кабеля соединен с силовым выходом генератора стабильного тока наземной станции управления, а нулевой силовой вход БУ ЭД - с нулевым силовым выходом БФРН наземной станции управления, при этом низковольтный вход БУ ЭД соединен с низковольтным выходом БФРН. 4 н. и 16 з.п. ф-лы, 6 ил.
1. Насосная установка, включающая наземную станцию управления, которая содержит:
- блок формирования рабочих напряжений (БФРН), включающий сетевой вход, низковольтный выход, нулевой силовой выход и силовой выход;
- генератор стабильного тока, силовой вход которого соединён с силовым выходом блока формирования рабочих напряжений и включающий силовой выход;
- датчик тока, установленный на силовом выходе генератора стабильного тока;
- контроллер наземной станции управления, соединенный с датчиком тока и выполненный с возможностью замера длительности импульса датчика тока и вычисления плотности среды;
при этом БФРН и генератор стабильного тока наземной станции управления многожильным кабелем соединены с подземным оборудованием,
при этом подземное оборудование включает:
- плунжерный насос,
- погружной трёхфазный линейный привод постоянного тока, соединенный с плунжерным насосом и включающий электродвигатель и соединенный с ним блок управления электродвигателем (БУ ЭД);
при этом погружной трёхфазный линейный привод постоянного тока выполнен с возможностью работы в режиме БДПТ (бесконтактного двигателя постоянного тока) с самокоммутацией, силовой вход БУ ЭД посредством многожильного кабеля соединен с силовым выходом генератора стабильного тока наземной станции управления, а нулевой силовой вход БУ ЭД - с нулевым силовым выходом БФРН наземной станции управления, при этом низковольтный вход БУ ЭД соединен с низковольтным выходом БФРН.
2. Насосная установка, включающая наземную станцию управления, которая содержит:
- блок формирования рабочих напряжений (БФРН), включающий сетевой вход, низковольтный выход, нулевой силовой выход и силовой выход;
- генератор стабильного тока, силовой вход которого соединён с силовым выходом блока формирования рабочих напряжений и включающий силовой выход;
- датчик тока, установленный на силовом выходе генератора стабильного тока;
- контроллер наземной станции управления, соединенный с датчиком тока и выполненный с возможностью замера силы тока и начального напряжения генератора стабильного тока и вычисления температуры среды по сопротивлению, определённому как соотношение начального напряжения (UR) к току нагрузки генератора стабильного тока при установке штока погружного трехфазного линейного привода постоянного тока в начальное положение с учётом температуры двигателя, и по глубине погружения трёхфазного линейного привода постоянного тока,
при этом подземное оборудование включает:
- плунжерный насос,
- погружной трёхфазный линейный привод постоянного тока, соединенный с плунжерным насосом и включающий электродвигатель и соединенный с ним блок управления электродвигателем;
при этом погружной трёхфазный линейный привод постоянного тока выполнен с возможностью работы в режиме БДПТ (бесконтактного двигателя постоянного тока) с самокоммутацией, а силовой вход блока управления посредством многожильного кабеля соединен с силовым выходом генератора стабильного тока наземной станции управления, а нулевой силовой вход - с нулевым силовым выходом блока формирования рабочих напряжений (БФРН) наземной станции управления, при этом низковольтный вход БУ ЭД соединен с низковольтным выходом БФРН.
3. Насосная установка по п.1 или 2, в которой многожильный кабель выполнен четырёхжильным, при этом
блок формирования рабочих напряжений (БФРН) выполнен с возможностью формирования постоянного низковольтного напряжения на своем низковольтном выходе и соединён с низковольтным входом блока управления электродвигателем посредством
первой жилы (постоянного низковольтного напряжения) и
второй жилы (нулевого низковольтного напряжения) многожильного кабеля;
нулевой силовой выход БФРН соединен с нулевым силовым входом блока управления электродвигателя посредством третьей жилы;
силовой выход генератора стабильного тока соединён с силовым входом блока управления электродвигателем посредством четвёртой жилы многожильного кабеля,
причём в подземном оборудовании нулевые шины (вторая и третья жилы) гальванически соединены в блоке управления электродвигателем.
4. Насосная установка по п.1 или 2, в которой многожильный кабель выполнен трёхжильным, подземное оборудование дополнительно включает развязывающий конденсатор, развязывающий трансформатор и выпрямитель, при этом
блок формирования рабочих напряжений (БФРН) выполнен с возможностью формирования переменного низковольтного напряжения на своем низковольтном выходе и соединён с низковольтным входом блока управления электродвигателем посредством первой жилы многожильного кабеля, соединённой с развязывающим трансформатором через развязывающий конденсатор, первичная обмотка которого соединена с первой и второй жилой многожильного кабеля, а вторичная обмотка гальванически развязана и соединена с выпрямителем, при этом отрицательный вывод выпрямителя соединён со второй жилой силовой нулевой шины, при этом положительный и отрицательный выводы выпрямителя подключены к низковольтному входу блока управления электродвигателем;
силовой нулевой выход БФРН соединен с силовым нулевым входом блока управления электродвигателя посредством второй жилы;
выход генератора стабильного тока соединён с силовым входом блока управления электродвигателем посредством третьей жилы многожильного кабеля.
5. Насосная установка по любому из пп. 1-4, в которой генератор стабильного тока выполнен регулируемым и имеет регулирующий вход, контроллер имеет регулирующий выход, который соединен с регулирующим входом генератора стабильного тока, при этом контроллер наземной станции управления выполнен с возможностью регулировки величины тока, времени пуска генератора стабильного тока.
6. Насосная установка по любому из пп. 1-4, в которой блок управления электродвигателем выполнен с возможностью переключения хода штока погружного трехфазного линейного привода постоянного тока на обратный при получении фронта напряжения при пуске генератора стабильного тока, при этом БУ ЭД задает направление движения штока погружного трехфазного линейного привода постоянного тока в зависимости от срабатывания концевого датчика, установленного у верхнего конца хода штока погружного трехфазного линейного привода постоянного тока.
7. Насосная установка по любому из пп. 1-6, в которой наземная станция управления включает декодер, подземное оборудование оснащено по крайней мере одним датчиком концевого положения привода, включает кодер, соединённый с датчиком и силовыми жилами многожильного кабеля, выполненного с возможностью передачи цифровой информации по силовым жилам, при этом кодер соединен с декодером наземной станции управления, который соединен с контроллером наземной станции управления.
8. Насосная установка по п. 6, в которой контроллер наземной станции управления выполнен с возможностью автоматической регулировки времени переключения штока привода погружного трехфазного линейного привода постоянного тока на обратный ход.
9. Насосная установка по п. 6, в которой генератор стабильного тока выполнен с возможностью генерации тока (Iн) 100 А.
10. Насосная установка по п. 7, в которой подземное оборудование дополнительно оснащено по крайней мере одним датчиком температуры, соединенным с кодером.
11. Насосная установка по п. 7, в которой подземное оборудование дополнительно оснащено по крайней мере одним датчиком давления, соединенным с кодером.
12. Способ определения плотности среды скважины насосной установкой, который включает:
- добычу нефти насосной установкой, включающей плунжерный насос, погружной трёхфазный линейный привод постоянного тока, работающий в режиме БДПТ с самокоммутацией, и наземную станцию управления, осуществляющую питание погружного трехфазного линейного привода постоянного тока от генератора стабильного тока, на силовом выходе которого установлен датчик тока;
- замер длительности импульса тока при полном ходе штока плунжерного насоса при помощи датчика тока;
- вычисление контроллером наземной станции управления плотности среды по длительности импульса тока при полном ходе штока плунжерного насоса.
13. Способ определения плотности среды скважины насосной установкой по п.12, при котором замер длительности импульса тока при полном ходе штока плунжерного насоса при помощи датчика тока осуществляется контроллером.
14. Способ определения плотности среды скважины насосной установкой по п.12, при котором замер длительности импульса тока при полном ходе штока плунжерного насоса при помощи датчика тока осуществляется ПЭВМ.
15. Способ определения плотности среды скважины насосной установкой по п.12, при котором контроллер наземной станции управления выполнен с возможностью автоматической регулировки времени переключения штока привода погружного трехфазного линейного привода постоянного тока на обратный ход.
16. Способ определения температуры среды скважины насосной установкой, который включает:
- добычу нефти насосной установкой, включающей плунжерный насос, погружной трёхфазный линейный привод постоянного тока, работающий в режиме БДПТ с самокоммутацией, и наземную станцию управления, осуществляющую питание погружного трехфазного линейного привода постоянного тока от генератора стабильного тока, на силовом выходе которого установлен датчик тока;
- замер силы тока при помощи датчика тока на силовом выходе генератора стабильного тока и замер начального напряжения на том же выходе при установке штока погружного трехфазного линейного привода постоянного тока в начальное положение;
- вычисление температуры среды по сопротивлению, определённому как соотношение начального напряжения (UR) к току нагрузки генератора стабильного тока при установке штока погружного трехфазного линейного привода постоянного тока в начальное положение с учётом температуры двигателя, и по глубине погружения трёхфазного линейного привода постоянного тока.
17. Способ определения температуры среды скважины насосной установкой по п.16, при котором вычисление температуры среды осуществляется контроллером.
18. Способ определения температуры среды скважины насосной установкой по п.16, при котором вычисление температуры среды осуществляется ПЭВМ.
19. Способ определения температуры среды скважины насосной установкой по п.16, при котором начальное напряжение (UR) измеряют 3-5 мс.
20. Способ определения температуры среды скважины насосной установкой по п.16, при котором контроллер наземной станции управления выполнен с возможностью автоматической регулировки времени переключения штока привода погружного трехфазного линейного привода постоянного тока на обратный ход.
| Станция управления насосной установкой нефтедобывающей скважины (варианты) | 2017 |
|
RU2651651C2 |
| УНИВЕРСАЛЬНАЯ СТАНЦИЯ УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОНАСОСОМ | 2010 |
|
RU2430273C1 |
| Способ управления штанговым скважинным насосом | 2016 |
|
RU2610857C1 |
| US 5362206 A, 08.11.1994. | |||

